Compact transceiver for personal communication powered by energy harvesting
128
Stan Bauwens, Daan Vanden Meersschaut powered by energy harvesting Compact transceiver for personal communication Academiejaar 2012-2013 Faculteit Ingenieurswetenschappen en Architectuur Voorzitter: prof. dr. ir. Daniël De Zutter Vakgroep Informatietechnologie Master in de ingenieurswetenschappen: elektrotechniek Masterproef ingediend tot het behalen van de academische graad van Begeleider: Ramses Pierco Promotoren: prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan Vandewege
Transcript of Compact transceiver for personal communication powered by energy harvesting

Stan Bauwens, Daan Vanden Meersschaut
powered by energy harvestingCompact transceiver for personal communication
Academiejaar 2012-2013Faculteit Ingenieurswetenschappen en ArchitectuurVoorzitter: prof. dr. ir. Daniël De ZutterVakgroep Informatietechnologie
Master in de ingenieurswetenschappen: elektrotechniekMasterproef ingediend tot het behalen van de academische graad van
Begeleider: Ramses PiercoPromotoren: prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan Vandewege


Permission for use of content
“The authors give permission to make this master dissertation available for consulta-
tion and to copy parts of this master dissertation for personal use.
In the case of any other use, the limitations of the copyright have to be respected,
in particular with regard to the obligation to state expressly the source when quoting
results from this master dissertation.”
Stan Bauwens and Daan Van den Meersschaut, June 2013
iii

Toelating tot bruikleen
“De auteurs geven de toelating deze masterproef voor consultatie beschikbaar te stellen
en delen van de masterproef te kopieren voor persoonlijk gebruik.
Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder
met betrekking tot de verplichting de bron uitdrukkelijk te vermelden bij het aanhalen
van resultaten uit deze masterproef.”
Stan Bauwens en Daan Van den Meersschaut, juni 2013
iv

Stan Bauwens, Daan Vanden Meersschaut
powered by energy harvestingCompact transceiver for personal communication
Academiejaar 2012-2013Faculteit Ingenieurswetenschappen en ArchitectuurVoorzitter: prof. dr. ir. Daniël De ZutterVakgroep Informatietechnologie
Master in de ingenieurswetenschappen: elektrotechniekMasterproef ingediend tot het behalen van de academische graad van
Begeleider: Ramses PiercoPromotoren: prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan Vandewege

Preface
This thesis is the completion of our five year long education in electrical engineering.It was an ideal chance to design a practical solution for a system for which there is alot of future. We would like to thank prof. dr. ir. Johan Bauwelinck and prof. dr. ir.Jan Vandewege to have given us this opportunity.
Without the assistance of our supervisor ir. Ramses Pierco, this thesis would not havebeen this successful and educational. We are very grateful for his support and guidanceand we very much appreciated his feedback on our report.
A special thanks goes to ing. Jan Gillis and ir. Li Xiao. Jan Gillis for the numerouscreated printed circuit boards and shared experience concerning soldering. Li Xiao forhis help during the difficult periods of debugging code.We would also like to thank the rest of the INTEC DESIGN research group to createan open environment where help was only a small step away.
Family and friends also gave us moral support and stimulation to continue the goodwork, in particular Delphine Vanvooren. For this we would like to thank them.
We thank each other. It was very useful to do this thesis together. A lot more couldbe achieved than when working alone.
Last but not least, we would like to honour our colleagues at the other side of theroom, Sander Lybeert and Marijn Verbeke. They were always ready to answer everylittle question and made the ’thesiskot’ a place where you could work in a nice am-biance. Thank you for this wonderful year, gentlemen.
Stan Bauwens and Daan Van den Meersschaut, June 2013
vi

Compact Transceiver for Personal Communication
Powered by Energy Harvesting
by
Stan Bauwens & Daan Van den Meersschaut
Master’s Thesis submitted to obtain the academical degree ofMaster of Science in Electrical Engineering
Academic year 2012-2013
Promotors: prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan VandewegeSupervisor: ir. Ramses Pierco
Faculty of Engineering and ArchitectureGhent University
Department of Information TechnologyChairman: prof. dr. ir. Daniel De Zutter
Summary
In this master dissertation a fully autonomous wireless sensor module is designed. Au-tonomy is guaranteed using energy harvesting to power the sensor module. In the firstchapter a possible application is discussed. The following chapter handles the conceptof energy harvesting. The four covered energy sources are solar, thermal, vibration andRF. The conclusion of these sections is that solar and thermal energy harvesting gene-rate the most power and will serve as power supply. In the third chapter the storageof energy using supercapacitors and thin-film batteries is described. In the followingchapter, the implementation of the transceiver of the sensor module is discussed whichconsists of a microcontroller, an antenna chip and a sensor. Furthermore a base stationwith the same components is designed which communicates with the computer. Thereceived data is then visualised. The last chapter combines all the previous chaptersto create an operational system.
Keywords
Energy Harvesting, Wireless, Sensor, Thin-film Battery, Supercapacitor

Compact transceiver for personal communicationpowered by energy harvesting
Stan Bauwens & Daan Van den Meersschaut
Supervisor(s): prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan Vandewege and ir. Ramses Pierco
Abstract— In this article, a practical solution for an autonomous wire-less sensor network is explained. It is powered using Energy Harvesting toguarantee its autonomy.
Keywords— Energy Harvesting, Wireless Transceiver, Sensor, Thin-filmBattery, Supercapacitor, Low Power
I. INTRODUCTION
THE problem of monitoring elderly people has been a hottopic for the past few years. For these people autonomy is
very important for their mental well-being which leads to a needfor an autonomous monitoring system. A possible solution forthis problem is discussed in this article, an autonomous wire-less sensor module. The sensor module is powered using en-ergy harvesting (EH). Due to the limited available power, all thecomponents should be consuming as little energy as possible.Therefore the sensor module only sends data periodically. Be-tween two transmissions the sensor module goes to a low powermode (LPM) to safe energy.
II. ENERGY HARVESTING
Energy harvesting is vital for the autonomous operation ofsensor modules. Battery replacement is not necessary when en-ergy is continuously gathered from different external sources.Solar energy, thermal energy, vibrational energy and energy con-tained in RF waves are the different energy types discussed.
A. Solar
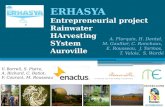
A solar energy harvesting circuit was designed, using theLTC3105 DC/DC converter from Linear Technology. Solar en-ergy gathered by the SLMD121H10 solar module from IXYS isstored by the LTC3105 on a 3 F supercapacitor, the supercapac-itor is charged to 3.3 V. The efficiency of the LTC3105 stronglydepends on the output capacitor voltage. To improve efficiencythe supercapacitor should not be discharged below 2 V. Since aconstant supply voltage of 3.3 V is needed and the supercapaci-tor voltage depends on the stored energy, a step-up converter isneeded. The TPS61221 of Texas Instruments is used. With 2 Vas the minimal supercapacitor voltage, a total charge/dischargeefficiency of 79.9 % is reached. At an illuminance of 65 klux, anaverage power of 77 mW (7mW/cm2) is stored on the superca-pacitor. Figure 1 shows the average storage power as a functionof the capacitor start voltage of the charge cycle (Vcap,start).
B. Thermal
If the sensor module is a personal device, body heat is alsoa possible source of energy. For indoor applications, solar en-ergy produces little energy. The LTC3109 from Linear Tech-nology is a low input voltage DC/DC converter and is used to
Fig. 1. Average stored power as a function of the supercapacitor start voltage ofthe charge cycle (Vcap,start) at an illuminance of 65 klux
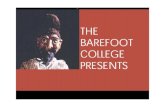
Fig. 2. The output power as a function of load impedance for the PolarTEC PT4at a temperature difference of 20C
convert the low-voltage power generated by a peltier element.The peltier element converts thermal energy into electric energybut the voltages generated can be very low, especially when us-ing body heat as an energy source. At a 20C temperature dif-ference, the maximum available power generated by the peltierelement is 3.6 mW (cf. figure 2). Under optimal conditionsthe LTC3109 reaches an efficiency of 28.3 %. At this maximumpower point a power of 480 µW (47µW/cm2) is available at theload when a realistic temperature difference of 10C is applied.
C. Vibration
Due to the portability of the sensor module, vibrational energyis also a possible power source. A piezoelectric element is usedto generate electric power. The resulting AC voltages have tobe rectified and converted to a proper usable DC voltage. TheLTC3588-1 chip is used to do this conversion.

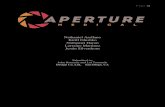
Fig. 3. Spectrum below 1 GHz, Ghent
The power which is captured from this energy source is low (4µW , cf. [1], [2]) in comparison to solar energy and thermalenergy, so for the end system, this type of energy is not used.
D. RF
Capturing radio waves is ever more interesting due to the in-crease of wireless transmissions. Radio waves above 1 GHz ingeneral carry less peak power than radio waves below 1 GHz.The spectrum from 10 MHz to 990 MHz has multiple interest-ing frequency bands (cf. figure 3). The bands have an averagetotal channel power of approximately -40 dBm (except FM -33.5dBm).
A rectangular patch antenna is used to capture the RF signals.The dimensions are proportional to the wavelength. This makeslow frequencies hard to capture with a small antenna. Anothersubstrate with a higher εr can be used to decrease the dimen-sions. However this will lead to a worse transmission coefficientfrom the air to the substrate.SO3010 is a high frequency PCB material with an εr of 11.2.The material is characterised using simulations and measure-ment to have an εr of 10.7. The power transmission from the airto this substrate is a factor 2 smaller than FR4. This makes, thissubstrate a viable solution if the power is twice as high at lowerfrequencies.A thicker substrate will emit more radiation than a thin, due tomore fringe fields at the side of the antenna.It is possible (under right circumstances) to use RF energyto power a device, but for the portable device with a certainsendrate (once per 10 s/1 min) the power (0.1 - 1 µW cf. [1],[2]) is too small.
III. STORAGE
The generated power is only partially used by the transceiver.The remaining energy has to be stored for periods during whichno energy is available from energy harvesting. The energy har-vested by solar energy is stored in a 3 F supercapacitor (cf. fig-ure 4). Because the voltage over this capacitor isn’t constant, aboost converter is needed to convert the voltage to a constant 3.3V supply. The used converter is the TPS61221 from Texas In-struments. The energy harvested from thermal energy is storedby the LTC3109 on a 0.33 F storage capacitor. When the thermal
source becomes unavailable, energy from this storage capacitoris used by the LTC3109 to power the output by an internal buckconverter. No modules have been made to harvest energy fromvibrational or RF energy.
Because two or more energy sources can be used at the sametime, a power combination circuit is implemented. To this endtwo CBC3150 EnerChips from Cymbet are used. These com-ponents consist of a thin-film battery and an internal controlcircuit and charge pump. The batteries of the two EnerChipsare made common and each EnerChip can charge the commonbattery with the energy from its input. The outputs of the En-erChips are connected via two diodes. To handle large currentpulses sinked by the digital part of the system, boost capacitorswith a total value are 1.41 mF are added (cf. figure 4).
IV. TRANSCEIVER
The generated and stored energy is used to power atransceiver which consists of three mainly digital parts: a micro-controller, an antenna chip (with antenna) and a sensor. Thesethree components plus the storage and EH part, form the sensormodule. There is also another module, the base station, whichconsists of the same three components but is powered using theUSB-port of the computer. This is shown in figure 5.
A. Microcontroller
The microcontroller (MSP430G2553) communicates with thesensor and antenna chip using SPI (Serial Peripheral Interface).The microcontroller is the master and selects a slave to commu-nicate with by pulling the correct chip select pin low. The mastersets the registers of the slaves in order to let them function cor-rectly.The microcontroller also determines the timetable of the sensormodule. At a regular interval, the microcontroller will awakenitself and the antenna chip. It will read and process data (sensordata and circuit voltage levels), and afterwards sends this data tothe antenna chip who will transmit it wirelessly.
B. Sensor
In the context of the monitoring application, the sensor is anaccelerometer. The sensor has to be able to detect an event ofpeople falling. If this happens an interrupt is sent to the micro-controller. Note that the sensor has to be active at all times toprevent a missed event.
C. Transmission protocol
The carrier frequency of the antenna chip (CC110L) is 433MHz which lies in the ISM band. The sensor module will alsoawake and transmit if the microcontroller gets an interrupt froma button or the accelerometer. After every transmission, the sen-sor module listens for a reply for 10 ms. Afterwards, the micro-controller processes the received data (or does nothing if nothingwas received) and puts the sensor module back to sleep (LPM).

Solar cell Regulator
Super-Capacitor
Step-up converter
Thin-film batteries
Boost-Capacitor
Microcontroller
Peltier element Regulator
Super-Capacitor
Sensor
Antenna chip
Thermal board
Solar board
Sensor module board
Fig. 4. Schematic of the complete sensor module
MicrocontrollerEnergy Harvesting
Sensor Module
SPI bus
Antenna Chip
Sensor __CS
__CS
Storage
Base Station
Antenna Chip
__CS
__CS
MicrocontrollerSPI busUART
Fig. 5. Schematic of the complete system
At the receiving end, the base station receives a message froma sensor module and sends back a short reply, possible contain-ing settings for the corresponding sensor module. The receiveddata from the sensor modules is sent from the BS to the PC us-ing UART (Universal asynchronous receiver/transmitter).
D. GUI
The data is then visualised by a Graphical User Interface(GUI) in MATLAB. This data contains the SensorID from thecorresponding sensor module, the voltage level of its battery andtwo bits which indicate a fall or button interrupt.
V. CONCLUSION
A fully functional system is created with autonomous sensormodules. The data is correctly received and displayed. Thereare however improvements needed to bring this product on themarket. For example: further miniaturisation, improvements ofthe communication protocol, optimising the settings of compo-nents, etc.
REFERENCES
[1] Murugavel Raju, Mark Grazier White Paper, Energy Harvesting,http://www.ti.com/lit/wp/slyy018a/slyy018a.pdf
[2] Faruk Yildiz Potential Ambient Energy-Harvesting Sources and Techniques,http://scholar.lib.vt.edu/ejournals/JOTS/v35/v35n1/pdf/yildiz.pdf
[3] Stan Bauwens, Daan Van den Meersschaut Compact transceiver for per-sonal communication powered by energy harvesting

Een compacte transceiver voor persoonlijkecommunicatie gevoed door energy harvesting
Stan Bauwens & Daan Van den Meersschaut
Supervisor(s): prof. dr. ir. Johan Bauwelinck, prof. dr. ir. Jan Vandewege en ir. Ramses Pierco
Abstract—In dit artikel, wordt een praktische oplossing voor autonomedraadloze sensornetwerken uitgelegd. Om de autonomie van de individuelemodules te garanderen, worden ze gevoed met behulp van energy harvest-ing.
Keywords— Energy Harvesting, Draadloze Zender, Sensor, Dunne-filmBatterij, Supercapaciteit, Laag Vermogen
I. INTRODUCTIE
HET probleem van het toezicht op ouderen is een hot topicin de afgelopen jaren. Autonomie is erg belangrijk voor
hun geestelijk welzijn, wat leidt tot een behoefte voor een au-tonoom observatiesysteem. Een mogelijke oplossing voor ditprobleem wordt besproken in dit artikel, een autonome draad-loze sensormodule. De sensormodule wordt gevoed met behulpvan energy harvesting (EH). Vanwege het beperkt beschikbaarvermogen moeten alle onderdelen zo weinig mogelijk energieverbruiken. Daarom verstuurt de sensormodule data periodiek.Tussen twee transmissies gaat de sensormodule in een laagver-mogenmodus om energie te besparen.
II. ENERGY HARVESTING
Energy harvesting is van vitaal belang voor de autonomewerking van de sensormodules. Het vervangen van batterijenis niet nodig wanneer energie continu wordt verzameld uit ver-schillende externe bronnen. Zonne-energie, thermische energie,vibratie-energie en energie uit radiogolven zijn de verschillendeenergytypes die besproken worden.
A. Zonne-energie
Een circuit voor het opslaan van zonne-energie is ontworpenmet behulp van de LTC3105 DC/DC-omzettter van Linear Tech-nology. Zonne-energie verzameld door de SLMD121H10 zon-nemodule van IXYS wordt opgeslagen door de LTC3105 op eensupercondensator van 3 F, de supercondensator wordt opgeladentot 3.3 V. De efficientie van de LTC3105 is sterk afhankelijk vande condensatorspanning. Om de efficientie te verbeteren magde supercondensator niet worden afgeladen tot onder de 2 V.Aangezien een constante voedingsspanning van 3.3 V nodig isen de supercondensatorspanning afhankelijk is van de opgesla-gen energie, is een step-up omzetter nodig. Hiertoe wordt deTPS61221 van Texas Instruments gebruikt.Met 2 V als de minimale supercondensatorspanning, wordt eentotale laad/ontlaad-efficientie van 79.9 % is bereikt. Bij een il-luminantie van 65 klux, wordt een gemiddeld vermogen van 77mW (7 mW/cm2) opgeslagen op de supercondensator. Figuur1 toont het gemiddeld opslagvermogen als functie van de con-densator startspanning van de laadcyclus.
Fig. 1. Gemiddeld opgeslagen vermogen als functie van de supercondensatorstartspanning van de oplaadcyclus (Vcap,start) bij een illuminantie van 65klux
Fig. 2. PolarTEC PT4 uitgangsvermogen als functie van lastimpedantie bij eentemperatuurverschil van 20C
B. Thermische energie
Als de sensormodule kort op het lichaam gehouden kan wor-den, is lichaamswarmte een mogelijke bron van energie. Voorbinnenshuistoepassingen is er niet genoeg energie beschikbaaruit zonne-energie. De LTC3109 van Linear Technology is eenlage ingangsspanning DC/DC-omzetter en wordt gebruikt omde zeer lage spanningen opgewekt door een peltier element omte zetten naar een vaste 3.3 V. Het peltier element zet thermis-che energie om in elektrische energie maar de spanningen kun-nen zeer laag zijn, zeker als lichaamswarmte als energiebronwordt gebruikt. Bij een temperatuurverschil van 20C, bedraagthet maximaal vermogen gegenereerd door het peltierelement 3.6mW (cf. figuur 2). Onder optimale omstandigheden bereikt deLTC3109 een rendement van 28.3 %. Een maximaal vermogenvan 480 µW (47 µW/cm2) is bij een temperatuurverschil van

Fig. 3. Spectrum onder 1 GHz, Gent
10C beschikbaar aan de last.
C. Vibratie-energie
Door de draagbaarheid van de sensormodule is vibratie-energie ook een mogelijke energiebron. Een piezo-elektrischelement wordt gebruikt om elektrische energie te genereren.De resulterende wisselspanning moet gelijkgericht en omgezetworden in een goed bruikbare constante voedingsspanning. DeLTC3588-1 chip wordt gebruikt om deze conversie uit te voeren.
Het ontvangen vermogen van deze energiebron is laag (4 µW[1], [2]) in vergelijking met zonne-energie en thermische en-ergie. Om deze reden wordt piezo-elektrische energie niet ge-bruikt in het systeem.
D. RF
Energie halen uit radiogolven wordt steeds interessanter, ditis te wijten aan de toename van radiogolven in de lucht. Ra-diogolven met frequenties boven 1 GHz bevatten in het alge-meen minder vermogen dan radiogolven met frequenties onderde 1 GHz. Het lokale spectrum [10 MHz, 990 MHz] (in Gent)heeft meerdere interessante frequentiebanden (zie figuur 3). Debanden hebben elk een gemiddeld totaal kanaalvermogen vanongeveer -40 dBm (uitgezonderd FM met een kanaalvermogenvan -33.5 dBm).Een rechthoekige patch-antenne wordt gebruikt om RF-signalente ontvangen. De afmetingen van de antenne zijn evenredig metde golflengte. Dit maakt dat lage frequenties moeilijker te ont-vangen zijn met een kleine antenne. Een ander substraat met eenhogere εr kan worden gebruikt om de afmetingen te verkleinen.Dit zal leiden tot een slechtere transmissiecoefficient tussen delucht en het substraat.SO3010 is een PCB-materiaal voor hoge frequenties met een εrvan 11.2. Aan de hand van simulaties en metingen bleek dat hetsubstraat een εr heeft van 10.7. De vermogenoverdracht van delucht naar het substraat is een factor 2 kleiner dan bij het FR4substraat. Dit maakt het substraat pas een goede oplossing alshet vermogen bij de nu bereikbare lagere frequenties twee keerzo hoog is als bij hogere frequenties.Een dikker substraat zendt meer straling uit dan een dun sub-straat doordat er meer franjevelden zijn.Het is mogelijk (onder de juiste omstandigheden) om RF-
energie te gebruiken voor het voeden van sommige systemen.Voor het draagbare systeem hier besproken met een sendratevan 1 transmissie per 10 s/1 min, is het vermogen (0.1-1 µW[1], [2]) te klein.
III. ENERGIE-OPSLAG
De gewonnen energie wordt slechts gedeeltelijk door desensormodule gebruikt. De resterende energie moet wordenopgeslagen voor momenten wanneer er geen energie meer kanopgewekt worden uit de gebruikte bronnen. De energie gewon-nen uit zonne-energie wordt opgeslagen in een superconden-sator van 3 F. Omdat de spanning over deze condensator nietconstant is, wordt een boost-omzetter gebruikt om de span-ning om te zetten in een constante 3.3 V voedingsspanning.De gebruikte omzetter is de TPS61221 van Texas Instruments.De gewonnen thermische energie wordt opgeslagen door deLTC3109 op een 0.33 F opslagcondensator. Wanneer de ther-mische bron niet meer beschikbaar is, wordt de energie uit dezeopslagcondensator gebruikt door de LTC3109 om de last aan deoutput te voeden. Dit gebeurt aan de hand van een interne buck-omzetter.
Omdat 2 of meer energiebronnen tegelijkertijd moeten kun-nen worden gebruikt, wordt een vermogencombinatie circuitontworpen. Hiervoor worden 2 CBC3150 EnerChips van Cym-bet gebruikt. Deze componenten bestaan uit een dunne-film bat-terij en een intern regelcircuit en ladingspomp. De batterijen vande 2 EnerChips zijn gemeenschappelijk gemaakt en elke Ener-Chip kan de gemeenschappelijke batterij opladen met de energiebeschikbaar aan zijn ingang. De uitgangen van de EnerChipszijn via 2 diodes verbonden met elkaar. Om grote stroompulsenvan de microcontroller aan te kunnen, zijn boostcondensator meteen totale waarde van 1.41 mF toegevoegd.
IV. TRANSCEIVER
De gegenereerde en opgeslagen energie wordt gebruikt voorhet aandrijven van een transceiver die bestaat uit drie hoofdza-kelijk digitale onderdelen: een microcontroller, een antennechip(met antenne) en een sensor. Deze drie componenten, de op-slagelementen en het EH deel vormen de sensormodule. Er isook een andere module, het basisstation, die bestaat uit dezelfdedrie componenten, maar gevoed wordt via de USB-poort van decomputer. Dit wordt weergegeven in figuur 5.
A. Microcontroller
De microcontroller (MSP430G2553) communiceert met desensor en antennechip met behulp van SPI (Serial Peripheral In-terface). De microcontroller is de master en selecteert een slavemet behulp van de juiste chip select pin. De master stelt de reg-isters van de slaves in om ze correct functionerend te houden.De microcontroller bepaalt ook het tijdschema van de sensor-module. Met regelmatige tussenpozen zal de microcontrollerzichzelf en de antennechip doen ontwaken. De microcon-troller zal gegevens lezen en verwerken, en daarna stuurt het degegevens naar de antennechip die de data draadloos verstuurt.

Solar cell Regulator
Super-Capacitor
Step-up converter
Thin-film batteries
Boost-Capacitor
Microcontroller
Peltier element Regulator
Super-Capacitor
Sensor
Antenna chip
Thermal board
Solar board
Sensor module board
Fig. 4. Schema van de volledige sensormodule
B. Sensor
In het kader van de toezichttoepassing is de sensor een ac-celerometer. De sensor moet in staat zijn om een gebeurtenisvan vallende mensen te detecteren. Als dit gebeurt, wordt eeninterrupt gezonden naar de microcontroller. Merk op dat de sen-sor de hele tijd actief dient te zijn om een gemiste gebeurtenis tevoorkomen.
C. Transmissie protocol
De draaggolffrequentie van de antennechip (CC110L) is 433MHz, deze frequentie ligt in de ISM band. De sensormodule zalook ontwaken en data verzenden als de microcontroller een in-terrupt krijgt van een drukknop of van de versnellingsmeter. Naelke verzending, wacht de sensormodule 10 ms op een antwo-ord. Daarna verwerkt de microcontroller de ontvangen data (ofdoet niets als er niets is ontvangen) waarna de sensormoduleterug naar laag vermogen modus gaat.
Aan de andere kant, ontvangt het basisstation een bericht enstuurt het een kort antwoord met mogelijk een instellingswijzig-ing voor de bijhorende sensormodule. De ontvangen gegevensvan de sensormodules worden verzonden van het basisstationnaar de PC met behulp van UART (Universal asynchronous re-ceiver/transmitter).
D. GUI
De gegevens worden vervolgens gevisualiseerd met een GUI(Graphical User Interface) in MATLAB. De gegevens bevatten
de SensorID van de overeenkomstige sensormodule, het span-ningsniveau van de batterij en bits die een val of knop interruptaanduiden.
V. CONCLUSIE
Een volledig functionerend systeem met autonome sensor-modules is ontworpen. De gegevens worden correct ontvangenen weergegeven. Er zijn echter verbeteringen nodig om dit prod-uct op de markt te brengen. Bijvoorbeeld: verdere miniaturis-ering, verbetering van het communicatieprotocol, optimaliserenvan de instellingen van de componenten, etc.
REFERENCES
[1] Murugavel Raju, Mark Grazier White Paper, Energy Harvesting,http://www.ti.com/lit/wp/slyy018a/slyy018a.pdf
[2] Faruk Yildiz Potential Ambient Energy-Harvesting Sources and Techniques,http://scholar.lib.vt.edu/ejournals/JOTS/v35/v35n1/pdf/yildiz.pdf
[3] Stan Bauwens, Daan Van den Meersschaut Compact transceiver for per-sonal communication powered by energy harvesting
MicrocontrollerEnergy Harvesting
Sensor Module
SPI bus
Antenna Chip
Sensor __CS
__CS
Storage
Base Station
Antenna Chip
__CS
__CS
MicrocontrollerSPI busUART
Fig. 5. Schema van het volledige systeem

Contents
Permission for use of content iii
Toelating tot bruikleen iv
Preface vi
Summary vii
Extended abstract vii
Extended abstract Dutch xi
Contents xiv
List of Figures xvii
List of Tables xx
Glossary xx
1 Introduction 1
2 Application 2
3 Energy Harvesting 4
3.1 Solar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.1.2 Solar module . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.1.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Thermal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.2 Peltier element . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.3 Regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
xiv

3.3 Vibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3.2 Piezoelectric element . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3.3 Full wave rectifier and buck converter . . . . . . . . . . . . . . . 19
3.3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 RF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.2 Possibilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.3 Simulations and measurements . . . . . . . . . . . . . . . . . . 27
3.4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4 Storage 33
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Storage methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.1 Conventional rechargeable batteries . . . . . . . . . . . . . . . . 33
4.2.2 Supercapacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.3 Thin-film batteries . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2.4 Choice of the storage component . . . . . . . . . . . . . . . . . 38
4.3 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.1 Thin-film battery . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.2 Supercapacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.3 Pulse current applications . . . . . . . . . . . . . . . . . . . . . 49
4.3.4 Storage circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5 Transceiver 57
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 Functional overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3 Sensor module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3.1 Microcontroller . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.3.2 Antenna chip . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.3.3 Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.4 Implementation sensor module . . . . . . . . . . . . . . . . . . . . . . . 65
5.4.1 Connections and communication . . . . . . . . . . . . . . . . . . 65
5.4.2 Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.4.3 Coding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.4.4 Coding and testing issues . . . . . . . . . . . . . . . . . . . . . 74
5.4.5 Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.4.6 Power performance . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.5 Base station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.5.1 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.6 Implementation BS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
xv

5.6.1 Connections and communication . . . . . . . . . . . . . . . . . . 78
5.6.2 Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.6.3 Coding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.7 Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.7.1 Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.7.2 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.8 Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.9 Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6 Total system 90
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.2 Boards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6.3 Performance and measurements . . . . . . . . . . . . . . . . . . . . . . 91
7 Conclusion 94
A Figures and Layout PCBs 95
A.1 Boards of the complete sensor module . . . . . . . . . . . . . . . . . . . 95
A.1.1 Solar board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A.1.2 Thermal board . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
A.1.3 Sensor module board . . . . . . . . . . . . . . . . . . . . . . . . 97
A.2 Test boards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Bibliography 102
xvi

LIST OF FIGURES xvii
List of Figures
3.1 Output power density of the CPC1824 and SLMD121H10 under different
loads at an illuminance of 12 klux . . . . . . . . . . . . . . . . . . . . . 5
3.2 Output power of the SLMD121H10 as a function of load resistance at
different light intensities . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Output resistance of the SLMD121H10 solar module as a function of
illuminance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4 Schematic of the solar energy harvesting circuit . . . . . . . . . . . . . 8
3.5 LTC3105 power efficiency under different output voltages at Vin=2.6 V
(illuminance = 65 klux) . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6 Output and input power of the LTC3105 at an illuminance of 65 klux . 10
3.7 Total energy efficiency of a charge cycle as a function of capacitor start
voltage (Vcap,start) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.8 Average stored power as a function of the supercapacitor start voltage
of the charge cycle (Vcap,start) at an illuminance of 65 klux . . . . . . . . 12
3.9 Output power of the PolarTECTM PT4 as a function of the temperature
difference at different loads (1.2 kΩ and 12 kΩ) . . . . . . . . . . . . . 14
3.10 The Output power as a function of load impedance for the PolarTECTM
PT4 at a temperature difference of 20C . . . . . . . . . . . . . . . . . 14
3.11 Schematic of the thermal energy harvesting circuit . . . . . . . . . . . . 17
3.12 LTC3109 power efficiency under different input voltages at a load of 12kΩ 18
3.13 Piezoelectric element: V22BL . . . . . . . . . . . . . . . . . . . . . . . 20
3.14 Schematic of the piezoelectric energy harvesting circuit . . . . . . . . . 20
3.15 Spectrum below 1 GHz, Ghent . . . . . . . . . . . . . . . . . . . . . . . 23
3.16 Spectrum FM-Radio, Span 35 MHz . . . . . . . . . . . . . . . . . . . . 24
3.17 Spectrum T-DAB, Span 35 MHz . . . . . . . . . . . . . . . . . . . . . . 24
3.18 Spectrum DVB-T at 482 MHz, Span 35 MHz . . . . . . . . . . . . . . . 24
3.19 Spectrum DVB-T at 650 MHz, Span 70 MHz . . . . . . . . . . . . . . . 24
3.20 Spectrum GSM, Span 70 MHz . . . . . . . . . . . . . . . . . . . . . . . 25
3.21 Patch antenna, fringe fields . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.22 FR4 patch: S(6,6) simulation, S(5,5) measurement . . . . . . . . . . . . 27
3.23 Simulation RO3010 patches: S(2,2) 1.28 mm, S(4,4) 0.64 . . . . . . . . 28
3.24 SO3010 patch (1.28 mm): S(4,4) simulation, S(3,3) measurement . . . . 29

3.25 SO3010 patch (0.64 mm): S(2,2) simulation, S(1,1) measurement . . . . 29
3.26 Measurement SO3010 patches: S(3,3) 1.28 mm, S(1,1) 0.64 mm . . . . 29
3.27 Simulation optimised SO3010 patches: S(1,1) 1.28 mm, S(2,2) 0.64 mm 30
4.1 Ragone chart [28] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Typical EnerChip discharge characteristic as copied from datasheet CBC3150
[29] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3 Battery voltage and Vout of two battery-connected CBC3150 . . . . . . 43
4.4 Input charge current as a function of the battery voltage . . . . . . . . 43
4.5 Supercapacitors as storage element . . . . . . . . . . . . . . . . . . . . 46
4.6 TPS61221 power efficiency as a function of input voltage, at an output
current of 95 µA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.7 Thin-film battery, boost capacitor and load during pulses . . . . . . . . 49
4.8 Charging of the boost capacitor with a single thin-film battery . . . . . 50
4.9 Cell resistance as a function of state of charge (Cymbet application note
[34]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.10 EnerChip circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.11 Input current as a function of time . . . . . . . . . . . . . . . . . . . . 56
4.12 Output power when discharging the thin-film batteries with a 67.5kΩ load 56
5.1 Schematic of the complete system . . . . . . . . . . . . . . . . . . . . . 57
5.2 Launchpad Development Tool with MSP430G2553 . . . . . . . . . . . . 61
5.3 CC110L AIR Module BoosterPack . . . . . . . . . . . . . . . . . . . . 63
5.4 Launchpad with Boosterpack plugged in . . . . . . . . . . . . . . . . . 63
5.5 ADXL362 Schematic overview . . . . . . . . . . . . . . . . . . . . . . . 65
5.6 ADXL362 Package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.7 Configuration pins of the µC, fixed SPI and analog inputs . . . . . . . 67
5.8 Active Mode Current vs DCO Frequency . . . . . . . . . . . . . . . . . 68
5.9 Schematic overview code for the sensor module . . . . . . . . . . . . . . 72
5.10 Simple board sensor module with accelerometer . . . . . . . . . . . . . 75
5.11 Simple board sensor module without accelerometer . . . . . . . . . . . 75
5.12 Current profile sensor module, BS in range, 0 dBm . . . . . . . . . . . 77
5.13 Current profile sensor module, no BS in range, 0 dBm . . . . . . . . . . 77
5.14 Schematic overview of the code for the base station . . . . . . . . . . . 81
5.15 Part 1: SPI and UART communication of SM (D0-D3) and BS (D8-D13) 83
5.16 Part 2: SPI and UART communication of SM (D0-D3) and BS (D8-D13) 83
5.17 GUI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.18 Protocol timeline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.1 Complete sensor module (top view) . . . . . . . . . . . . . . . . . . . . 91
6.2 Complete sensor module (side view) . . . . . . . . . . . . . . . . . . . . 91
6.3 Schematic overview of the sensor module and its supply modules . . . . 91
xviii

6.4 Visualisation in Matlab of 2 sensor modules in a network . . . . . . . . 93
A.1 Solar energy harvesting board, PCB layout top layer . . . . . . . . . . 95
A.2 Solar energy harvesting board, PCB layout bottom layer . . . . . . . . 95
A.3 Solar energy harvesting board . . . . . . . . . . . . . . . . . . . . . . . 96
A.4 Thermal energy harvesting board, PCB layout top layer . . . . . . . . . 96
A.5 Thermal energy harvesting board, PCB layout bottom layer . . . . . . 96
A.6 Thermal energy harvesting board . . . . . . . . . . . . . . . . . . . . . 97
A.7 Sensor module board, PCB layout top layer . . . . . . . . . . . . . . . 97
A.8 Sensor module board, PCB layout bottom layer . . . . . . . . . . . . . 98
A.9 Sensor module board . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
A.10 Test board for solar energy harvesting (LTC3105) . . . . . . . . . . . . 99
A.11 Test board for thermal energy harvesting (LTC3109) . . . . . . . . . . 99
A.12 Test board for vibrational energy harvesting (LTC3588-1) . . . . . . . . 100
A.13 Test board for the thin-film batteries (CPC3150) . . . . . . . . . . . . 100
A.14 Active diode (LTC4413) . . . . . . . . . . . . . . . . . . . . . . . . . . 101
xix

LIST OF TABLES xx
List of Tables
3.1 Characterisation SO3010 substrate permittivity . . . . . . . . . . . . . 30
5.1 Properties of MSP430G2553 . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Properties of CC110L . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3 Properties of ADXL362 . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.4 Allocation of the data lines . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.5 Transmit power versus receive range at 433 MHz in an outdoor situation 85

Glossary
µC Microcontroller
ACLK Auxiliary clock
ADC Analogue to Digital Converter
ASK Amplitude-shift Keying
BS Base Station
BSL Bootstrap Loader
BW Bandwidth
CCS Code Composer Studio
CLK Clock
COM Serial Communication Port
CS Chip Select
DCO Digital Controlled Oscillator
DVB-T Digital Video Broadcast Terrestrial
ECC Electronic Communications Committee
EH Energy Harvesting
FCC Federal Communications Commission
FIFO First In First Out
GFSK Gaussian Frequency-shift Keying
GUI Graphical User Interface
ISM Industrial, Scientific, Medical
xxi

LPM Low Power Mode
MISO Master In Slave Out
MOSI Master Out Slave In
MSP Signal Microprocessor
PCB Printed Circuit Board
PMR Personal Mobile Radio
SM Sensor Module
SME Small or Medium Enterprise
SPI Serial Peripheral Interface
T-DAB Terrestrial-Digital Audio Broadcast
TI Texas Instruments
UART Universal asynchronous Receiver
and Transmitter
xxii

INTRODUCTION 1
Chapter 1
Introduction
The assignment for this thesis is to create a compact transceiver for personal com-
munication (a sensor module). This sensor module has to be powered using energy
harvesting. Due to this harvesting the sensor module becomes completely autono-
mous. Autonomy ensures a broad application area. A whole network of these modules
would enable fine-grained, long-term monitoring without the need of tens or hundreds
of battery-powered nodes to be deployed. A network with a large number of nodes,
makes battery replacement a cumbersome and time consuming task.
The main focus of this thesis is to make a practical (small) sensor network which has
(for now limited) communication possibilities and does not need external adjustments
to function correctly after the system has started up. Monitoring the operations of the
network should be possible.
Monitoring environmental properties is a possible application. Afterwards a central
system can use this information to control and monitor the environment or adapt itself
according to the changing properties. If these properties represent the state of certain
people carrying along the sensor modules, the modules become personal transceivers.
In the next chapter such an application is discussed, upon which some of the design
choices are based.

APPLICATION 2
Chapter 2
Application
For this thesis, an independent wireless sensor network is created which communicates
with a fixed base station. The main advantage of using a wireless system is the porta-
bility and autonomy of the sensor modules. This makes it ideal for monitoring systems.
A promising application of this is situated in the health care sector 1.
Monitoring elderly people is a hot topic due to the ageing of the population. There is
a growing need to monitor these people and to wirelessly tranfer alarm signals when
accidents occur. The current products for personal portable alarms and constant mo-
nitoring are mainly based on batteries which have to be replaced every now and then.
Also, for personal alarms, there is typical no guarantee or warning when going out of
range of the alarm detector. For these reasons, our system can perform better.
Our portable system does not need any external power sources and can send data
frequently if desired. Multiple monitoring functions are possible: skin temperature,
movement (fall sensor), sound, etc. Other human processes (heartbeat, certain blood
levels, ...) can also be monitored, however there is no commercially low power sensor
available for this.
The signal strength and absence of the regular burst of data can be used to do an out-
of-range-check and a life-check. This way, the chance of not detecting a malfunction
can be diminished.
To increase the operational range multiple base stations can be installed. This can
lower the power consumption of the sensor module since a smaller transmission power
is needed when the distance to the base station(s) is decreased. This can also benefit
localisation of the module, when we compare the different received powers in multiple
base stations.
1This application was based on an idea from Alphatronics, an SME based in Lokeren. They alreadydetermined and analysed the economic feasibility.

APPLICATION 3
The base stations are able to receive multiple signals and to distinguish between them.
This makes multi-user applications possible. This is very useful in rest homes where
monitoring certain individuals is sometimes critical.
The product which follows out of the implementation of this thesis, will be user-friendly
(no changing of batteries and no manual handling necessary), which gives it a huge
economic advantage. It can be reduced in size, so it does not bother the user and
makes the module easy to wear. You can’t expect people who require help, to change
batteries every now and then. This increases the autonomy and well-being of those
people. It also means that the created product would be more reliable than other exis-
ting products (no misplaced batteries or damage due to placing). The system sends
data signals on a regular basis so its status info is available (power level, out-of-range)
and if the signals are absent, an action can be triggered.

ENERGY HARVESTING 4
Chapter 3
Energy Harvesting
3.1 Solar
3.1.1 Introduction
The first source of energy which is examined is solar energy. Using photovoltaic cells
solar power is converted into electrical power. This method of energy scavenging is
already widely used and has proven itself to be viable for large and small scale purposes.
This makes solar energy a very promising source.
3.1.2 Solar module
Since the goal of this thesis is to make a compact transceiver, the solar panel must
be compact as well. Very small solar cells in an SOIC package are available, like the
CPC1824 [1]. Although these solar cells can be used to power a single IC, they don’t
produce enough power to drive a microcontroller and transceiver. About 100 µW is
what you can expect from the CPC1824 under optimum conditions. A better choice
is the SLMD121H10 IXOLAR SolarMD from the IXYS corporation [2]. This solar
module is considerably larger than the CPC1824 but, with a size of 42 by 35 mm, it is
still going to be smaller than the PCB. The solar module can be mounted on the back
to form a compact module.
A comparison between the two solar modules is shown in figure 3.1. The figure gives
the power density [mW/cm2] of the two solar modules as a function of load impedance
at an illuminance of 12 klux (measured in the shadow on a sunny day). It can be seen
that the SLMD121H10 delivers more power per unit of area.

3.1 Solar 5
Figure 3.1: Output power density of the CPC1824 and SLMD121H10 under different loadsat an illuminance of 12 klux
The power density curve of the larger solar module has its maximum power point at
a lower load impedance or equivalently, the larger solar module has a lower output
impedance. The reason becomes clear when you look at the larger solar module as
many smaller ones placed in parallel.
At optimal load and at an illuminance of 50 klux (direct sunlight, clear day) the
SLMD121H10 can provide 119 mW , the CPC1824 can only provide 1 mW. Because
of the inadequate output power of the CPC1824 the SLMD121H10 was chosen, but
there are a lot of suitable solar modules available. It is recommended however that the
chosen solar module can provide at least 20 mW under operation light conditions to
properly charge the batteries/supercapacitors that follow (cf. 4). The LTC3105 needs
a minimum input power to start operating. The minimum value of 20 mW (correspon-
ding with an illuminance of 10 klux) was experimentally determined.
The output impedance of a solar module becomes higher at decreasing light intensities
(cf. figure 3.3). At a certain light intensity the output impedance will become too high
for the following step-up converter to handle. If indoor solar energy harvesting (low
light intensity) is required, it is therefore better to use large solar modules with a low

3.1 Solar 6
open circuit voltage as they typically have a low output impedance. Here it is very
important that the open circuit voltage isn’t too low for the step-up converter that
follows (LTC3105).
Figure 3.2 shows the output power of the SLMD121H10 as a function of the load
resistance at different light intensities. It is clear that the maximum power point (the
output resistance) strongly depends on the light intensity. The output resistance of
the SLMD121H10 solar module is plotted in figure 3.3. To achieve maximum power
transfer at every light intensity, the regulator that follows should have a variable input
impedance. For further information on the SLMD121H10 the reader is referred to the
datasheet [2].
3.1.3 Regulator
Linear Technology has a wide variety of components specifically designed for energy
harvesting. This company is experienced in this sector. Their components have good
efficiencies and are used in a lot of different applications.
The LTC3105 [3] of Linear Technology is a step-up DC/DC converter specifically desi-
gned for solar energy harvesting from low voltage photovoltaic cells. Its input voltage
operating range is 225 mV to 5 V. An integrated maximum power point controller
allows for the user to set the operating point to achieve maximum power transfer from
the source. This is done by regulating the input voltage to a programmed value (via
a resistor on the MPPC pin). At a certain illuminance, the programmed voltage will
correspond with the solar module output voltage at the maximum power point. A
perfect match is only achieved at one illuminance level, but the voltage at maximum
power point does not vary much with light intensity. The voltage does strongly depend
on the used solar module so the LTC3105 can only be optimised for one solar module
at the time.
The schematic of the used solar harvesting circuit is shown in figure 3.4. A 3 F super-
capacitor load is placed at output of the LTC3105, this capacitor is used as the main
storage element (cf. section 4.3.2). The supercapacitor will be charged to a maximum
voltage of 3.7 V, this is set by the feedback resistors R1 and R2. Because the voltage
over the capacitor will vary, depending on the charge, another regulator is needed to
convert the voltage to a constant 3.3 V. Although this is not shown on figure 3.4, a
boost converter is intended. Since the intended boost converter (TPS61221) works

3.1 Solar 7
Figure 3.2: Output power of the SLMD121H10 as a function of load resistance at differentlight intensities
Figure 3.3: Output resistance of the SLMD121H10 solar module as a function of illuminance

3.1 Solar 8
with slightly higher input voltages than 3.3 V, a 3.7 V LTC3105 output voltage was
chosen to maximise the potential energy storage. The boost converter will be discussed
later in section 4.3.2.
A 300 kΩ resistor is placed at the MPPC pin of the LTC3105. This resistor sets the
minimum input voltage of the LTC3105 (the output voltage of the solar module) at
3 V. Since the efficiency of the LTC3105 depends on the input voltage (datasheet),
both the characteristics of the solar module and the characteristics of the LTC3105
should be taken into account when choosing this voltage. The 3V was chosen as an
optimum between the solar module efficiency and the LTC3105 efficiency. To take the
temperature dependency of the solar module into account, it is also possible to place
a thermally coupled diode on the MPPC pin. This was not done in this thesis.
Efficiency
The optimal input voltage of the LTC3105 depends on the output resistance of the
solar cell, which in turn depends on the light intensity and the temperature. The solar
cell characteristics aren’t the only parameters however, since the LTC3105 efficiency
isn’t the same for every input voltage.
Figure 3.5 shows the power efficiency of the LTC3105 under different output voltages.
This was measured at an illuminance of 65 klux (typical daylight illuminance, sunny
day). In this case Vin=2.6 V and Iin varied between 34.2 and 39.2 mA. This results in
an input power between 89 and 102 mW (cf. figure 3.6). The output was measured as
Figure 3.4: Schematic of the solar energy harvesting circuit

3.1 Solar 9
Figure 3.5: LTC3105 power efficiency under different output voltages at Vin=2.6 V (illumi-nance = 65 klux)
the 3 F supercapacitor load was charging. It can be seen that the efficiency strongly
depends on the output voltage. The reason is that the output current of the LTC3105
cannot exceed its input current. In the case of figure 3.5 the output current is 30 mA.
The LTC3105 already reaches this maximum current at a Vout of 1.2 V, therefore at
higher voltages the output power will increase linearly with Vout while the input power
varies only slightly between 89 and 102 mW (figure 3.6).
The power efficiency of the LTC3105 ranges from 21% at an output voltage of 0.7 V
to 89% at 3.4 V. However, the efficiency that matters is the total energy efficiency:
the ratio of stored energy on the supercapacitor to the total energy provided by the
solar module. Since the power efficiency is low at low supercapacitor voltages, the total
energy efficiency will depend on the voltage of the supercapacitor at the start of the
charge cycle (Vcap,start). When starting the charge cycle at a supercapacitor voltage of
0.7 V, the total energy efficiency over the whole capacitor charge cycle becomes 62.5%.
This charge efficiency becomes higher when charging the capacitor from a higher start
voltage (Vcap,start). This is shown in figure 3.7 where the total energy efficiency of a
charge cycle is plotted versus capacitor start voltage (Vcap,start).

3.1 Solar 10
Figure 3.6: Output and input power of the LTC3105 at an illuminance of 65 klux
Figure 3.7: Total energy efficiency of a charge cycle as a function of capacitor start voltage(Vcap,start)

3.1 Solar 11
To reach better efficiencies, the capacitor shouldn’t be discharged by the load too much
before the solar supply again becomes available. When starting the recharge cycle at
a Vcap,start voltage of 2.0 V for example, the energy efficiency becomes 79.9 %. This
results in an average power being stored on the supercapacitor of 77 mW. Figure 3.8
shows the average stored power as a function of Vcap,start at an illuminance of 65 klux.
A power of 77 mW is more than enough to power a pulsed sensor module.
Improvements
The output impedance of the solar module strongly depends on the light intensity (cf.
section 3.1.2). Therefore the operating point for maximum power transfer changes with
light intensity. In the current circuit this point is set by the resistor at the MPPC pin
of the LTC3105 and thus it cannot change with the light intensity. A possible impro-
vement might be to use a solar sensor to roughly measure the intensity. The maximum
power point might then be changed according to the light intensity. The CPC1824,
briefly mentioned in section 3.1.2, is suitable as a sensor. The solar cell is compact and
can easily be fitted onto the PCB. The sensor should be placed in parallel with a linea-
risation resistor and the output voltage should be measured with an ADC input of the
microcontroller (see section 5.3.3). The resistor value should be chosen as a trade-off
between resolution and linearity. A high resistor value increases the resolution since
the measured voltage (by the microcontroller) will cover a wider voltage range. The
resistance shouldn’t be to high or no distinction could be made between intensities at
higher intensity levels. A low resistor value increases the linearity because the number
of absorbed photons is proportional to the short circuit current.
3.1.4 Conclusion
Powers as high as 77 mW can be achieved in broad daylight (65 klux). This results in
about 7 mW/cm2. If this is compared with literature (e.g. [4] and [5]), this value is
comparable, but can still increase if the intensity is higher. This energy source will be
used to power the sensor module. The designed solar energy harvester is not designed
for indoor use. The light intensities are too low for our system to harvest any energy
from it. Other energy sources should be used.

3.2 Thermal 12
Figure 3.8: Average stored power as a function of the supercapacitor start voltage of thecharge cycle (Vcap,start) at an illuminance of 65 klux
3.2 Thermal
3.2.1 Introduction
Another energy form that can be harvested is thermal energy. Conversion from ther-
mal energy to electrical energy can happen via two distinct effects. In pyroelectricity a
voltage is generated by certain (pyroelectric) materials when heated or cooled. When
the material has reached a constant temperature, this voltage gradually disappears. In
thermoelectricity a voltage is generated by temperature differences. A thermoelectric
element creates a voltage difference when there is a temperature difference across the
element. This element also has the reverse operation. When a voltage is applied, both
sides of the element will be set at a different temperature. This can be used to cool or
heat objects.
The thermoelectric effect is best suited to harvest energy, especially for the purposes
of this thesis. One side of the element may experience heating, while the other side is
attached to a heatsink. The temperature difference will allow for thermal energy to be
harvested. One possible heat source is the human body, which is always available in

3.2 Thermal 13
personal applications. To generate power using the pyroelectric effect, a pyroelectric
element should constantly be heated and cooled. The number of applications which
use this effect are limited. Because of this, only the thermoelectric effect will be used.
The physics of the thermoelectric effect will not be discussed here but it is worth men-
tioning that the thermoelectric effect encompasses three different effects: the Seebeck
effect, the Peltier effect, and the Thomson effect [6]. The Seebeck effect is the conver-
sion of thermal energy to electrical energy. The peltier effect is effectively the opposite
i.e. the conversion of electrical energy to thermal energy. The Thomson effect handles
the heating or cooling of a wire with a temperature difference across its length and a
current flowing through it.
3.2.2 Peltier element
To generate power, using the thermoelectric effect, a peltier element will be used. As
mentioned before, one side of the element will experience heating while the other side
is attached to a heatsink so that this side remains at a more or less constant tem-
perature. The temperature difference will generate electrical energy (Seebeck). The
peltier element could of course also be used to generate a temperature difference when
a voltage is applied and thus using the Peltier effect rather than the Seebeck effect.
The used peltier element is the PolarTECTM PT4 from Laird Technologies [7]. This
is a compact (34 x 30 mm) thermoelectric module with maximum operating tempe-
rature of 80C, more than enough when using the human body as energy source. As
a first test, the power generated by the peltier element is measured (using different
resistive loads) as a function of the temperature difference. This results in figure 3.9.
It resembles an exponential function, but it will not continue increasing for higher
temperature differences due to temperature limitations of the peltier element. Remark
that these loads are not matched to the output impedance peltier element so they do
not provide the optimal power. In what follows, the optimal load will be determined.
Figure 3.10 shows the output power as a function of load impedance for the PolarTECTM
PT4 at a temperature difference of 20C. From the figure it follows that the internal
resistance of the peltier element is roughly 8 Ω and that, at a temperature difference of
20C, the maximum output power is 3.6 mW. Because of the low output impedance,
the generated voltage is low (173 mV at maximum power point but generally much
lower). A converter is needed to boost the voltage to 3.3 V, this converter has to be

3.2 Thermal 14
Figure 3.9: Output power of the PolarTECTM PT4 as a function of the temperature diffe-rence at different loads (1.2 kΩ and 12 kΩ)
Figure 3.10: The Output power as a function of load impedance for the PolarTECTM PT4at a temperature difference of 20C

3.2 Thermal 15
able to operate at extremely low input voltages.
3.2.3 Regulator
A chip from Linear Technology (cf. section 3.1.3) will also be used for the thermal
energy harvesting chip.
The LTC3109 [8] is a DC/DC converter designed for very low input voltages. The
input voltage operating range goes from 30 mV to 500 mV. The LTC3109 has an auto-
polarity function which allows for energy harvesting regardless of polarity of the input
voltage. To this end, the converter uses two external step-up transformers.
The LTC3109 uses internal switches to form an oscillator and the AC signal produ-
ced is then boosted and rectified internally. The minimum input operating voltage is
determined by the turn ratio of the external step-up transformers. A ratio of 1:100 is
recommended to reach voltages as low as 30 mV. If a higher minimum input operating
voltage is allowed, a lower transformer ratio is a better choice since the efficiency is
higher at these lower transformer ratios.
If the polarity in the intended application doesn’t change, de LTC3108 [9] could be
used. This regulator is almost exactly the same but has no autopolarity function and
the efficiency is slightly higher. Both the LTC3109 and LTC3108 have been specifically
designed for thermoelectric energy harvesting.
Schematic
The used schematic for the LTC3109 thermoelectric energy harvesting circuit is shown
in figure 3.11. The output voltage (Vout) is 3.3 V but this can be changed to 2.35 V,
4.1 V or 5 V. When the output has reached regulation at 3.3 V, the incoming energy
is stored on the 0.33 F supercapacitor at the Vstore pin. The supercapacitor is char-
ged to 5 V. When the input source becomes unavailable, the energy stored on the
supercapacitor will be used as backup for the output but only when the voltage on the
supercapacitor is larger than the programmed output voltage (in this case 3.3 V). This
is done by an internal buck converter.
A trade-off has to be made between a larger and a smaller supercapacitor value. A
larger capacitor is able to store more energy, but is completely useless when the su-

3.2 Thermal 16
percapacitor voltage never becomes larger than 3.3 V. A smaller capacitor is charged
more quickly to a voltage > 3.3 V and can thus be used more quickly as backup but
the capacitor can store less energy. In the schematic a value of 0.33 F was chosen but
the ideal value will depend on how much thermal energy is expected and on how long
the thermal source will become unavailable.
The LTC3109 has a few other pins which aren’t used in this design. The Vout2 pin is
exactly the same as Vout, only the output can be disabled by the Vout2 EN pin. This
can be used to shut down sensors who don’t have a sleep mode. The PGOOD pin is
an indicator for when the output has reached its programmed voltage. Lastly, a 2.2
V (internal) low dropout regulator (LDO) is available, but it is not used since none of
our intended components will work at a 2.2 V supply voltage.
Efficiency
Figure 3.12 shows the LTC3109 power efficiency under different input voltages at a
load of 12kΩ. The load was chosen so that at no tested input voltage enough power
would be transferred to the load for the output voltage to reach 3.3V. Since the load
doesn’t reach 3.3 V (in the test case Vout,max was 2.4 V) no energy will be transferred
to the store pin and all the available energy will go to the load. This allows for an
easier efficiency measurement.
As said before, the used peltier element has a very low output impedance (8 Ω) and to
measure the input power, the input current has to be measured. The internal resistance
of the available current meters was too high and resulted in incorrect measurements.
Instead the voltage across a 220 mΩ series resistance was measured.
As seen in de efficiency plot, the maximum efficiency is 28.3 % at an input voltage of
80 mV. This is low in comparison with regular DC/DC converters but regular DC/DC
converters don’t have a minimum input operating voltage as low as 30 mV. Higher
efficiencies are useless if the used converter cannot work at a certain input voltage. A
choice had to be made between higher efficiencies and lower minimum input operating
voltage. The voltages produced by the peltier element when using a human body as a
heat source are not spectacular (< 100 mV).
The power gathered from the peltier element when using body heat (the plates of the

3.2 Thermal 17
peltier element had a temperature difference of 10C) is 480 µW . With the used peltier
element measuring 3 by 3.4 cm, this results in a power density of 47 µW/cm2.
3.2.4 Conclusion
The results which were obtained in this section 3.2.3, can be compared with literature
([4] and [5]). The gathered power depends on the actual temperature difference but
with a power density of 47 µW/cm2 the results are in the same order of magnitude
as found in literature. For an outdoor environment (sunny day) the obtained power is
lower than when using solar energy. However for an indoor environment more energy
can be gathered from thermal energy than from solar energy. Thermal energy will be
used in our design to power the sensor module.
Figure 3.11: Schematic of the thermal energy harvesting circuit

3.3 Vibration 18
Figure 3.12: LTC3109 power efficiency under different input voltages at a load of 12kΩ
3.3 Vibration
3.3.1 Introduction
Vibration is the third source for EH, which is examined. In the application, the sensor
is used as a personal transceiver, which means that it is carried along with a person.
Movement vibrations are thus frequently present. This makes vibration an interesting
source to investigate.
To harvest this energy, a piezoelectric element is used. Such an element generates an
AC voltage with a frequency equal to the vibration frequency. This voltage has to be
rectified and converted to a usable DC voltage source.
3.3.2 Piezoelectric element
The piezo element V22BL from Volture [10] is especially made for energy harvesting
(figure 3.13, dimensions: 6.35 cm × 0.61 cm). It can produce high voltages when
triggered. This will make the rectifying step much more efficient. The voltage drop
over the diodes will be relatively small compared to the input voltages. The output
impedance of the element is very high, which makes the output current very small.

3.3 Vibration 19
There are two piezoelectric wafers on the V22BL. They can be connected in series or
in parallel to respectively double the voltage or the current. Another option, which is
determined according to the application is tuning the Volture piezo energy harvester.
This can be done by adding a tip mass on the edge of the cantilever. This will change
the resonance frequency to a frequency which is common in the application if the mass
is designed and chosen correctly. How to choose the mass can be determined on page
13 of the datasheet [10].
3.3.3 Full wave rectifier and buck converter
The LTC3588-1 of Linear Technologies [11] will be used. This chip will convert the AC
voltage of the V22BL to a usable DC voltage. It is specially made for converting the
energy of piezoelectric elements with a high output impedance. It consist of both the
full wave rectifier and a buck converter.
Internally the chip first rectifies the output of the piezoelectric element using a standard
4 diode full wave rectifier. The DC power generated is stored on a large external
capacitor, which can reach 20 V (limited by an internal zener diode). At the start, the
voltage on the storage capacitor will rise until it reaches 5 V. The output voltage stays
zero. At 5 V, a part of the charge on the storage capacitor (Vin) will be transferred to
Vout. Vin has dropped and will recharge to 5 V using the energy from the piezoelectric
element. At 5 V, the same charge transfer will happen. This cycle will repeat itself
until the preset value of Vout is reached. Then the storage capacitor will keep charging
until 20 V is reached. The created circuit in shown in figure 3.14. The output voltage
is set to 3.3 V (D1 = Vin2 and D2 = 0, with Vin2 an internal low voltage rail at 6 V).
Some rudimentary measurements were done. The functionality was tested to see if
the voltage at Vin dropped when it exceeded 5 V. Some charge is transferred to the
output capacitance. The efficiency of the first step (drop of Vin) can be calculated by
examining the voltage drop at the storage capacitor and the voltage step at the output.
efficiency =
CoutV 2out,1
2− CoutV 2
out,2
2CinV 2
in,2
2− CinV 2
in,1
2
= 68%. (3.1)
The efficiency of the rectifier is not measured. Some test are performed using the series
configuration of the piezoelectric elements and some with the parallel configuration.
The main difference is that when the current is doubled (parallel configuration) the
output voltage reached regulation more quickly.
An important remark is that the capacitor at the input discharges quite quickly, e.g.

3.3 Vibration 20
Figure 3.13: Piezoelectric element: V22BL
Figure 3.14: Schematic of the piezoelectric energy harvesting circuit

3.4 RF 21
2.4 µW at 3.5 V.
3.3.4 Conclusion
A better insight is achieved in vibration energy, but it became clear that the power
harvested would be much smaller in comparison to the first two sources of energy
harvesting. In literature [4], this anticipation was confirmed with power densities of 4
µW/cm2. Therefore, vibrational energy will not be used to power our transceiver.
3.4 RF
3.4.1 Introduction
More and more communication is performed wirelessly. This means that more and
more ambient RF energy is available due to billions of RF transmitters around the
world. These transmitters are e.g. personal (private) devices, mobile base stations and
broadcast stations. The amount of wireless data transfer and thus energy will only in-
crease in the next years. This makes energy scavenging using RF energy an interesting
option to investigate.
The first component to intercept RF energy is an antenna. The AC voltages induced
onto the antenna have to be converted to a useful DC voltage. For this, a rectifier
is needed. A general name for the combination of these two components is rectenna.
Optionally, some pre- and post-rectifying filters can be added. Like in the previous
sections (3.1, 3.2 and 3.3) the obtained voltages have to be boosted using a step-up
converter. The output from the converter can be used to charge a supercapacitor (cf.
chapter 4).
3.4.2 Possibilities
There are a lot of possibilities on how the energy can be harvested determined by the
frequency band in which one can harvest easily and with the highest energy levels, and
the choice of antenna shape and material. These choices are discussed below.
Frequency
The RF-band (3 kHz - 300 GHz) consists of many frequencies that can be exploited
to extract energy. At high frequencies (2.4 GHz and 5 GHz) Wifi is promising. It is

3.4 RF 22
widely spread and commonly used but a wireless router does not emit a lot of power
(maximum 20 dBm). Because of this, using Wifi is viable for domestic use, close to
the transmitter. For long range operation a high power transmit station is needed like
a mobile/TV/Radio base station. Above 1 GHz these are not commonly available.
The spectrum can be visualised by a spectrum analyser and an adjustable monopole
antenna SRH789 [13] from the lab. This antenna can be altered to resonate at frequen-
cies between 95 MHz and 1100 MHz. Not every frequency has the same gain when
the antenna is set to the correct length, but a general overview of the interesting and
powerful frequencies can be deduced. The gain of the monopole fluctuates between
2.15 dBi and 3.2 dBi when an optimal length is used. For the lower frequencies (95
MHz to 300 MHz), the antenna acts as a quarter wavelength monopole, while at higher
frequencies (300 MHz - 1100 MHz) the antenna has a length of 58
of the wavelength
like indicated on the antenna.
The local spectrum [10 MHz, 990 MHz] is given in figure 3.15 (resolution bandwidth
(BW) is 3 MHz, averaged over 100 samples). The power values indicated on this graph
are not the actual optimal powers. The antenna is set to a length of 44 cm which
means that it is only tuned for 2 frequencies but not for the entire spectrum. When
measuring a smaller frequency band (see later) the antenna can be set to a more ap-
propriate length. The origin of every large peak is indicated on the spectrum. Note
that the power on the graphs is the power integrated over 1 resolution BW.
Now every large peak will be discussed separately. The channel power from each of
these channels is measured using the MXA signal analyser N9020A from the lab. The
data is averaged over 100 samples and now a resolution BW of 100 kHz is chosen.
The indicated powers are now the result of an integration over 100 KHz (the BW).
The values of the powers below are highly dependent on the exact location and time
at which the measurements are done. The mutual relationship between the channel
powers is less variable so a rough estimate of the most promising channels can be made.
If integrated over the entire peak, the channel power is obtained.
• FM-Radio: On figure 3.16 the commonly used FM-Radio channel is displayed.
It ranges from 87.5 MHz to 108 MHz. The wavelength is about 3 meter and its
channel power is -33.5 dBm.
• T-DAB: The second major channel is a Terrestrial-Digital Audio Broadcast (T-
DAB) channel (figure 3.17) which ranges from 223 MHz to 224.8 MHz. The

3.4 RF 23
Figure 3.15: Spectrum below 1 GHz, Ghent
power in this channel is about -39.5 dBm and has a wavelength of about 1.33 m.
• DVB-T: In the next two figures (3.18 and 3.19) the effect of Terrestrial Digital Vi-
deo Broadcasting is shown in different frequency bands. The channel powers are
respectively -42.5 dBm and -39.5 dBm (sum of three channels) with wavelengths
of 0.62 m and 0.46 m (average of three channels).
• GSM: The last band which can be used to harvest energy is the well known 900
MHz GSM-band. The most activity was seen in the band between 900 MHz and
960 MHz. The peaks vary a lot and the channel power is fluctuating between -42
dBm and -36 dBm.
Antenna choice
There is a wide variety of antennas available. The most important criteria to choose
an antenna for energy harvesting are summarised below. These criteria are specifically
for the application of this thesis.
• Radiation pattern: If the radiation which has to be intercepted, does not come
from a certain direction (or the antenna does not have a fixed orientation) the
antenna should be rather omnidirectional to harvest enough energy in every direc-
tion. If a certain direction contains more radiation the radiation pattern should

3.4 RF 24
Figure 3.16: Spectrum FM-Radio, Span35 MHz
Figure 3.17: Spectrum T-DAB, Span 35MHz
Figure 3.18: Spectrum DVB-T at 482MHz, Span 35 MHz
Figure 3.19: Spectrum DVB-T at 650MHz, Span 70 MHz
have maximum gain towards that angle, but this is not the case for a portable an-
tenna with no fixed orientation. The omnidirectional gain of the antenna should
be as high as possible.
• Impedance bandwidth: A higher bandwidth will allow more frequencies to contri-
bute to the harvested energy.
• Integration: It should not pose a problem to integrate the antenna into our sensor
module without occupying too much space.
The kind of antenna implemented on a PCB can easily be integrated (in the application
2). More specific, a microstrip patch antenna. At the front side of the patch antenna
the gain is much higher than at the back side. This means that the patch antenna
should be placed with its front side to wherever the radiation is coming from. This is
not always possible due to the portability of the antenna. Important advantages are,
that the antenna has a low profile, a small cost and it is easy to fabricate. The total
size of the system has to be kept small. If the antenna would be integrated into the

3.4 RF 25
Figure 3.20: Spectrum GSM, Span 70 MHz
system, it would be situated on the bottom plane of a PCB. The circuit that converts
the harvested energy into a usable DC voltage can also be placed on the same PCB
but should have a small impact on the antenna performance. An interruption of the
ground plane should be avoided.
Matching and dimensions
When energy is harvested using an antenna, this antenna has to be matched to the
follow-up system. There are two possibilities of impedance matching [14]:
• Lumped element: Using resistors, capacitances and inductors, the antenna can be
matched to the follow-up system. This way optimal power transfer is guaranteed
for a certain frequency or frequency band.
• Distributed: It is also possible by using structural modifications of the antenna
layout, stubs, transmission lines, dielectric loading etc. to match the circuit.
A mix of both techniques can be used. One will start with an antenna which is matched
for certain frequencies and resonates. This way the input impedance is purely resistive
and all the available power is absorbed by the antenna. If needed, extra matching (if
not perfectly matched) can be added using lumped components and transmission lines
(stubs).
To dimension a simple rectangular patch antenna which resonates at a certain frequency
f, the following formula (3.2) can be used. It gives an approximation of the length of
the patch [15].

3.4 RF 26
L =λ
2√εr
(3.2)
In this formula, λ is the free space wavelength and εr is the relative permittivity of
the substrate. This is a rude approximation, but can be used as a guideline. This
formula assumes that all the fields are contained within the substrate. This is not
the case because of fringe fields (which cause radiation) partially situated in the air.
This causes the effective relative permittivity εr,eff to be somewhere in between 1 and
εr. Therefore the length will have to be larger than predicted by formula (3.2). The
resonance frequency can be determined by simulations or experimental formulas like
e.g. formula (3.3) from literature [16].
εr,eff ≈εr + 1
2+εr − 1
2
[1 +
10h
W
]− 12
(3.3)
L =λ
2√εr,eff
(3.4)
In this formula, h is the height and W is the width of the patch antenna.
If a low frequency band (with a large wavelength) has a lot of channel power, a patch
with large dimensions is needed to capture this energy efficiently. This does not fit
with the purpose of the thesis. A compact antenna is needed. It is possible to keep
the dimensions small by increasing the relative permittivity of the dielectric. The most
frequently used dielectric for PCBs is FR4 which has a relative permittivity of 4.25. It
is also possible to use other PCB materials to fabricate the patch e.g. RO3010 from Ro-
gers Corporation [12]. RO3010 is a high frequency PCB material which has a εr of 11.2.
E.g. if a patch antenna has to be made for the T-DAB (224 MHz) band, the dimensions
should be at least in the order of 32 cm when using FR4 as dielectric. This is far to
large for a compact design. If RO3010 is used, this becomes 20 cm, which is still large
but this can be incorporated more easily into e.g. clothing, package.
The amount of power transmitted (received) does also strongly depend on the thickness
of the substrate. Transmitted (or transceived) waves all origin from the fringe fields at
the side of the patch antenna (cf. figure 3.21). Therefore a thicker substrate is able to
emit more fringe fields than a thin substrate due to the larger side surface.

3.4 RF 27
Fringe fields
Substrate
Patch
GND
Substrate
Figure 3.21: Patch antenna, fringe fields
3.4.3 Simulations and measurements
Using ADS (Advanced Design System [17]), the RO3010 substrate is simulated for
some simple patch antennas. The first patch has a substrate thickness of 1.28 mm, the
second one 0.64 mm. They are dimensioned using the simple formula (3.2) at a center
frequency of 940 MHz. This frequency lies in the middle of the GSM band (cf. figure
3.20). A 1 GHz FR4 patch antenna was already available in the lab. It has a thick-
ness of approximately 0.83 mm. Figure 3.22 assures that (for FR4) the simulation and
measurements coincide fairly well. ADS simulates the ground and parameters correctly.
On figure 3.23, the S-parameters of the simulated RO3010 antennas are displayed. At
resonance, the thin substrate reflects less power, due to a better matching (same width
of the line feed, while substrate thickness is different). The resonance frequency also
slightly changes due to the difference in thickness of the substrate. In figure 3.26, the
actual measurements on the fabricated antenna are shown. The same conclusion can
be made about the reflection and resonance frequency.
Figure 3.22: FR4 patch: S(6,6) simulation, S(5,5) measurement

3.4 RF 28
In the next two figures (figure 3.24 and 3.25), the difference between the simulations
and the measured values are plotted. Note that the measurements have a higher re-
sonance frequency and a different shape. The reason that the curves do not coincide
is a bad setting of the parameters of the substrate (RO3010). Using formula 3.4, the
effective permittivity can be determined (L = 50 mm). Using this εr,eff and formula
3.3, the relative permittivity becomes 10.08 and 10.35 for respectively a thickness h of
0.64 mm and 1.28 mm. If those values for εr are inserted into ADS, they give rise to
a resonance frequency which is too high.
When tweaking the relative permittivity in ADS to make the resonance frequency from
the simulation and measurement coincide, a value of 10.75 is obtained for both thick-
nesses. This characterisation is summarised in table 3.1.
The matching and dimensioning of the antennas on the SO3010 is not very good be-
cause the feed lines are to wide (2 mm), the width and injection point are poorly
dimensioned. It would be better to use a line of 0.51 mm for the thin substrate and
1.05 mm for the thick substrate. This was calculated using linecalc, a tool in ADS. To
choose the other dimensions, some literature was used ([18] and [16]). Simulating this
patch, a general idea can be formed of what can be harvested using SO3010. Note that
the tweaked parameters for SO3010 are used. The results are shown in figure 3.27.
Remark that optimisation leads to very high Q-factors that rapidly change with small
modifications of the topology. So the value at resonance is not very representative for
the real situation.
Figure 3.23: Simulation RO3010 patches: S(2,2) 1.28 mm, S(4,4) 0.64

3.4 RF 29
Figure 3.24: SO3010 patch (1.28 mm): S(4,4) simulation, S(3,3) measurement
Figure 3.25: SO3010 patch (0.64 mm): S(2,2) simulation, S(1,1) measurement
Figure 3.26: Measurement SO3010 patches: S(3,3) 1.28 mm, S(1,1) 0.64 mm

3.4 RF 30
Table 3.1: Characterisation SO3010 substrate permittivity
Parameter Datasheet Experimental formula ADS Tweaking
εr 11.2 10.08-10.35 10.75
Figure 3.27: Simulation optimised SO3010 patches: S(1,1) 1.28 mm, S(2,2) 0.64 mm
The main problem when taking a material with a larger permittivity is the decreased
energy transfer from air to the substrate. Using formula (3.5) from the course Applied
Electromagnetism [19] the amplitude transmission coefficient can be calculated.
Tn =2
1 + Z0
Zs
(3.5)
With Z0 and Zs respectively equal to the characteristic impedance of the air and the
substrate. To get the characteristic impedances of the substrate, formula (3.6) is used.
Zs =
õ
ε
1√1 + j · tan(δ)
(3.6)
Note that the last factor is removed when losses can be neglected. This happens
when the loss tangent (tan(δ)) is much smaller than 1. This is the case for both FR4
(tan(δ) ≈ 0.018) and RO3010 (tan(δ) = 0.0022 − 0.0011). The permeability of both
the materials is approximately equal to the permeability of the air. This results in:
Z0 ≈√µ0
ε0(3.7)
ZFR4 ≈√
µ0
4.25 · ε0(3.8)

3.4 RF 31
ZRO3010 ≈√
µ0
11.2 · ε0(3.9)
Using (3.7),(3.8) and (3.9) it is possible to calculate the amplitude transmission coef-
ficients:
TFR4 =2
1 +√
4.25= 0.65 (3.10)
TRO3010 =2
1 +√
11.2= 0.46 (3.11)
This means that, using a larger dielectric constant, less power will enter the substrate
(so less power harvested). Using formula (3.12), twice as much power is available using
FR4. Note that this comparison is for patches which have the same surface and incident
power. The frequency of the incident signal has to be tuned for both the patches.
Power Ratio =0.652
0.462= 2.00 (3.12)
3.4.4 Conclusion
In the previous sections, a general idea and insights about RF energy harvesting were
created. It is definitely possible to use RF energy harvesting to power some sort of
device (like many examples on the internet proof). On the other hand, there are energy
sources with a lot more power. The average power harvested using ambient RF waves
is in the order of magnitude of 0.1-1 µW/cm2 ([4] and [5]). This is much less, than
what can be (and is) achieved using solar power and heat (one hundred to one hundred
thousand times more power). In this thesis, no module (rectifier and step-up converter)
will be designed that harvests energy out of RF power.
There are exceptions and conditions where RF energy harvesting is preferable/viable:
• Freedom of space: If more space is available (than in the suggested application)
more power can be received. More space opens up more possibilities concerning
different kinds of antennas e.g. loop antennas. These loop antennas can be made
resonant by placing a capacitor at the base.
• Freedom of thickness: A thicker substrate would also improve the amount of
power that is transferred to the harvesting circuit. Very thick substrates are not
commonly available.

3.4 RF 32
• Low frequencies: If a patch antenna is used, frequencies below 700 MHz are not
suitable to harvest due to size limitations. Enlarging the εr is not an optimal
solution if the power at low frequencies is comparable to the power at high fre-
quencies. If the low frequency power is a factor two higher (cf. (3.12)), using
RO3010 can become a viable solution. If a compact design is required, different
kinds of antennas can also be used to capture low frequencies.
• High power source: If a high power external source of RF energy is present (can
be self-generated) the energy that can be harvested is more significant compared
to the other sources.
• Low transmit frequency: If the transceiver (which is powered by the energy har-
vesting) sends very rarely, maybe enough energy can be collected in the interval
between two transmits to withstand the sudden burst of needed energy.

STORAGE 33
Chapter 4
Storage
4.1 Introduction
In the previous chapter energy harvesting was discussed. Since it is possible and likely
that more energy will be harvested than can be consumed at a given time, storage
elements have to be added as not to waste energy. Moreover in applications where the
energy source is not available all the time (e.g. solar applications), enough energy has
to be stored so that normal operation isn’t disrupted when the energy source becomes
unavailable.
Possible storage methods are conventional batteries (coin cell, NiMH, Li-ion, ...), thin-
film batteries or supercapacitors. The advantages and disadvantages of these different
types of storage elements will be discussed in the next section. After that the imple-
mentation will be discussed.
4.2 Storage methods
In this section an overview of the different available storage devices is given. The
information was gathered from various sources ([20], [21], [22], [23], [24], [25], [26]).
4.2.1 Conventional rechargeable batteries
The most obvious energy storage devices are the conventional rechargeable (electroche-
mical) batteries such as NiCd, NiMH, and Li-ion batteries. Each battery type has its
own advantages and disadvantages and a comparison between them will not be given
here. The most important advantages and disadvantages of electrochemical batteries in

4.2 Storage methods 34
general (in comparison with supercapacitors and thin-film batteries) are given below.
Advantages
• Flat voltage profile. Conventional batteries have an output voltage that more
or less remains constant for the most part of their charge cycle. The battery
voltage only starts to drop dramatically when up to 90% of the energy has been
discharged. This is a clear advantage with respect to supercapacitors.
• High energy density. Electrochemical batteries can have more than 10 times the
energy density of supercapacitors. Only fuel cells have higher energy densities.
Disadvantages
• Low number of recharge cycles. Rechargeable electrochemical batteries are infe-
rior to non-rechargeable batteries (lower energy densities, higher self-discharge,
...). Their electrical characteristics only get worse after each recharge cycle. The
most important changes are a decrease in energy capacity and a decrease in out-
put voltage. Rechargeable coin cells can only be recharged several 100 times
before their characteristics become inadequate.
• Self-discharge. Rechargeable electrochemical batteries have a higher self-discharge
than non-rechargeable batteries, the battery may be discharged in a week. This is
better than supercapacitors but much worse than solid-state thin-film batteries.
• Low power density. Electrochemical batteries have a much lower power density
than supercapacitors. Because of this, they are not suited for pulse current
applications.
• Slow charging. The charging of an electrochemical battery can take up to several
hours. Supercapacitors can be charged in several minutes.
• Affected by complete discharges. Electrochemical batteries deteriorate quickly
when they are discharged completely. It is very important that the battery
voltage doesn’t drop below a certain threshold.
• High environmental impact. Electrochemical batteries and especially rechar-
geable electrochemical batteries contain many toxic chemicals. When the batte-
ries are thrown away or begin to leak they can contaminate surface or ground-
water supplies. Lithium is used as a psychiatric drug and has an effect on the
human brain. Care must be taken when disposing of used batteries.

4.2 Storage methods 35
• Flammable. Many of the battery chemicals, especially lithium, are flammable.
When the battery combusts, the damage may not be restricted to the battery
itself. The electrical circuit may be destroyed and poisonous fumes may be re-
leased.
• Large physical size. In comparison with solid-state thin-film batteries, electro-
chemical batteries are bulky and heavy.
4.2.2 Supercapacitors
Supercapacitors, ultracapacitors or electric double-layer capacitors (EDLC) are capa-
citors with an extremely large capacitance value for their size and weight. They can
have an energy density 10 to 100 times higher than conventional elektrolytic capacitors.
In general, they have a bad frequency response but an excellent pulse response [22].
Because of this they are suited to store energy and deliver current pulses to a load.
The construction or the internal composition of supercapacitors will not be discussed
here but the main advantages and disadvantages are summarised below.
Advantages
• High output power. Supercapacitors have a power density that can be 10 to 100
times higher as conventional batteries. Because of this, they are suited for pulse
current applications where high and short current pulses are needed.
• Fast charge. While conventional batteries can take up to several hours to re-
charge, supercapacitors can be charged in several minutes or lower. This is
because they don’t rely on electrochemical energy storage but physical charge
storage. Supercapacitors also don’t need to be charged with a constant current
and they can handle high current peaks.
• Low impedance. Supercapacitors have a low output/input impedance which al-
lows them to handle current peaks. They can also be placed in parallel with a
battery to improve load handling. High current peaks will be provided by the su-
percapacitor while the battery provides more storage. This can increase battery
life significantly.
• Long life. Supercapacitors last much longer than conventional batteries. While
batteries deteriorate when constantly being charged and discharged, supercapaci-
tor life is mostly just a function of time at a certain temperature and voltage [22].
There is little degradation over hundreds of thousands of charge cycles (much hi-
gher than rechargeable batteries). The service life of supercapacitors can reach

4.2 Storage methods 36
10 to 15 years which means that they often will outlast the rest of the circuit.
This can significantly reduce maintenance costs.
• Not affected by deep discharges. Electrochemical batteries deteriorate quickly
when they are discharged completely, this is not the case with supercapacitors.
• Improved safety. Supercapacitors are not flammable and won’t explode.
• Low toxicity. Supercapacitors do not release any hazardous substances that can
damage the environment, unlike many batteries.
• Increase in capacitance when the temperature decreases below the rating tempe-
rature. This is not the case for electrochemical batteries.
Disadvantages
• Low energy density. Supercapacitors have energy densities that are approxima-
tely 10 times lower than conventional batteries.
• High self discharge. The self-discharge rate is higher than that of an electroche-
mical battery.
• Rapid voltage drop. As in any capacitor the voltage drops linearly with the total
charge on the capacitor. A regulator will be needed to supply a constant voltage.
This will introduce extra losses.
• More expensive. When comparing supercapacitors with conventional batteries
of the same capacity, supercapacitors are more expensive. ”Since the electro-
static device life of the supercapacitor is much longer than the service life of
electrochemical batteries, they often have a lower long term total cost.” [27]
• Initial capacitance fade. The capacitance value can quickly drop in the beginning
of its service life. The capacitance value continus to drop (more slowly) during
the rest of the service life. The internal resistance also slowly increases during
the service life. These ageing effects have to be taken into account when selecting
the supercapacitor.
• Low maximum voltage. Supercapacitors cannot handle high voltages. A series
connection of more than 1 supercapacitor is needed to obtain higher voltages.
Voltage balancing circuits are recommended when 2 capacitors are placed in series
and required if more than three capacitors are connected in series. This is because
no 2 components are the same and 2 supercapacitors can have a different leakage

4.2 Storage methods 37
current (at the same voltage). Since in a series connection the leakage current of
1 supercapacitor must flow in the other, the voltage over the capacitors will not
be equally divided (one capacitor will have a higher voltage than the other so
that their leakage currents are the same). So without proper balancing circuits
it may still be possible that the maximum ratings are exceeded.
• Integration issues. The supercapacitors are derated in capacity when soldered at
high temperatures. Reflow soldering is not recommended.
4.2.3 Thin-film batteries
Unlike conventional batteries, thin film batteries (also called laminar batteries) are
composed of solid-state thin films. They contain lithium but in a much smaller dose
than conventional batteries. They can have a thickness of 50 µm and in many cases they
can be made flexible. Thin-film batteries are available from companies as Excellatron,
Infinite Power Solutions, Cymbet or Solicore. They can be made on silicon wafers using
semiconductor processes. The main advantages and disadvantages are summarised
below.
Advantages
• Flat voltage profile. As with conventional batteries, the output voltage of thin-
film batteries more or less remains constant during discharge. The voltage only
starts to drop rapidly when 80% of the energy has already been discharged.
• Very low self-discharge. Of all the storage devices discussed here, thin-film bat-
teries have by far the lowest self-discharge. There is an energy loss of about 1 or
2 % per year as opposed to 10 to 20% per day for supercapacitors [26].
• Minimal device ageing. Conventional rechargeable batteries (especially coin-cells)
are notorious for quickly losing their capacity when recharging too many times.
Thin-film batteries like the cymbet CBC050 still retain 80% of the specified
capacity after 5000 recharge cycles.
• Fast charging. Thin-film batteries can charge faster than conventional batte-
ries, the cymbet CBC050 charges to 80% of total charge in under 20 minutes.
Conventional batteries can take up to several hours.
• Small footprint. Thin-film batteries have a more convenient size than electro-
chemical batteries or supercapacitors. They can be packaged in a conventional
ic-package. Another possibility is co-packaging. The thin-film battery may be

4.2 Storage methods 38
packaged together with other circuits such as real-time clock devices. This result
in lower losses and an even smaller physical size.
• Flexible. Some thin-film batteries can be made very flexible, they can be bend
and twisted without damage.
• Easily integrated. Because of their small size and conventional packaging, they
can be easily integrated. Reflow soldering is allowed.
• Environment friendly. Thin-film batteries have a very small chance of combustion
and they consists of less lithium, improving environmental credentials and health
benefits (because of the effect lithium has on the brain). All of this results in a
reduction in end of life cost [20].
• Damage tolerant. Thin-film batteries are solid-state devices. They can handle
more physical abuse than conventional batteries.
Disadvantages
• Limited charge current. Just as with conventional batteries, the charge current
is limited. Thin-film batteries can be charged faster than conventional batteries
but not nearly as fast as supercapacitors, which are not current limited.
• Limited recharge cycles. Although thin-film batteries can be recharged much
more than conventional batteries, they still have a disadvantage over supercapa-
citors in this regard.
• Limited capacity. Although thin-film batteries have higher energy densities than
conventional batteries, there are no high-capacity thin-film batteries available.
Several thin-film batteries can be combined and they will have a lower weight,
but this quickly becomes impractical and very expensive.
4.2.4 Choice of the storage component
A comparison between supercapacitors and conventional batteries with regard to their
energy and power densities can easily be seen in a Ragone chart (Figure 4.1 [28]), this
chart plots energy density as a function of power density. It can be seen that conven-
tional electrochemical batteries are better for large energy storage. Thin-film batteries
aren’t shown in the chart but they can have an even higher energy density while still
having a decent power density. For the time being however, thin-film batteries aren’t

4.3 Implementation 39
Figure 4.1: Ragone chart [28]
produced with large storage capacity. Combining multiple thin-film devices to obtain
a higher energy capacity can quickly become very expensive.
Supercapacitors have a lower energy density (10 times lower) than conventional batte-
ries but they can have a power density 10 to 100 times higher, making them ideal to
provide high current pulses to a load.
As seen in the chart, fuel cells have a higher energy density than conventional batteries.
Because of their low ignition point they were never considered as a suitable storage
device.
Even though conventional batteries have a higher energy density than supercapacitors,
because of their short life span and higher environmental impact the choice was made
to use only supercapacitors and thin-film batteries as storage elements.
4.3 Implementation
4.3.1 Thin-film battery
Thin-film batteries are available from companies like Excellatron, Infinite Power Solu-
tions, Cymbet or Solicore. The choice was made for the EnerChips of Cymbet because
of their availability and conventional packaging.

4.3 Implementation 40
Figure 4.2: Typical EnerChip discharge characteristic as copied from datasheet CBC3150[29]
Cymbet Enerchip
The Cymbet corporation produces thin-film batteries [30] and these batteries come in
two forms:
The EnerChip CBC050 [31] is a solid state rechargeable battery with a capacity of
50 µAh (at 3.8 V). As with all conventional batteries the capacity depends on the
discharge rate as depicted in figure 4.2. The rated capacity of 50 µAh is at a discharge
rate of 100 µA. As with conventional batteries the capacity of the battery depends on
the discharge current. At a higher discharge rate the capacity will be lower and at a
lower discharge rate the capacity will be higher than the nominal capacity.
The EnerChip CC CBC3150 [29] consists of the same battery but also includes a circuit
for controlled charging of the battery and has a separate output which can be adjusted
and thus differ from the battery voltage. The chip has a built-in energy storage pro-
tection, making sure that the internal battery isn’t overcharged. The internal charge
pump charges the battery from input voltages ranging from 2.5 to 5.5V without the
need for an external control circuit.
The EnerChip CC CBC3150 also acts as uninterruptible power source. When the input
source is available (and between 2.5 and 5.5V), the input is connected to the output of
the device. However, when the source becomes unavailable the output voltage is set at
the user-defined voltage (between 2.5 and 5.5V) with the energy being provided by the

4.3 Implementation 41
battery. The battery voltage is relatively constant and varies between 4.1V and 3.8V
for the most part of its charge cycle. As with most solid state batteries the device has a
low self-discharge and the battery almost doesn’t deteriorate, this allows for thousands
of recharge cycles. After 5000 recharge cycles (at 10% depth of charge) the EnerChip
retains 80% of its specified capacity. This allows for a long term use of the device.
Lastly the CBC050 can be combined with the CBC3150 by connecting the battery pins.
The result will be a CBC3150 with an increased storage capacity. Up to 9 CBC050 can
be added, making the total energy capacity 500 µAh. By combining several CBC3150
in this way, it is possible to charge the common battery with different inputs. This
way several sources can charge the battery, even at the same time.
All these properties make the Cymbet EnerChip ideal for this thesis and the imple-
mentation will be discussed later on.
The major downside of the EnerChip thin-film battery is the current limitation. Due
to the relatively high battery resistance (ranging from 700 Ω to 7 kΩ depending on
temperature and charge cycle, see later on), the output voltage drops significantly when
the output current is larger than 200 µA. The charge current is also limited to several
hundreds µA. Because of this, supercapacitors will be necessary to handle large input
current peaks from the solar module. External capacitors will also be needed at the
output to handle current peaks from the load. This is discussed in the section on pulse
current applications (4.3.3).
Figure 4.3 gives the battery voltage and output voltage of two CBC3150 with connec-
ted battery pins as a function of time when charging with an input voltage of 3.3 V.
The battery voltage rises quickly in the beginning but, as mentioned before, remains
almost completely between 3.8 and 4.1 V. The output voltage follows the battery vol-
tage exactly and is 0.6 V lower. This means that the output will only be 3.3 V at a
battery voltage of 3.9 V and thus the output depends on how far the battery is charged
(state of charge). This is not a problem since the rest of the circuit (see later on) can
work perfectly at supply voltages between 2.5 V and 3.6 V. Combined with the voltage
drop over the output resistance, the output voltage will eventually become too low for
the circuit to act as a supply voltage and the battery will therefore never become fully
discharged.
Figure 4.4 shows the input charge current as a function of the battery voltage. As
expected the charge current is large when the battery is almost totally discharged. As

4.3 Implementation 42
the battery is charging the charge current decreases until the battery is fully charged.
A relatively large quiescent current of 35 µA remains (caused by the enabled charge
pump) but this can be reduced to about 2 µA by pulling down the enable pin of the
CBC3150. This can be done by the digital part of the system (cf. chapter 5).
4.3.2 Supercapacitors
Introduction
All discussed energy sources apart from solar energy have a low power output. At 3.3
V and under the intented test conditions, the tested devices cannot provide currents
larger than 150 µA (At high temperatures (> 60C) thermal energy scavenging can
produce more power). Because of these low currents the cymbet thin-film batteries are
well suited as a storage device.
This is not the case for solar energy. The output power of the used solar module
(SLMD121H10 [2]) during normal daylight can be as high as 165 mW, at 3.3 V this is
a current of 50 mA. The cymbet EnerChips cannot handle these currents, the circuit
won’t be damaged but only a few percent of the input power will be stored.
Supercapacitors can be used as a storage element for solar energy scavenging. The
used supercapacitors (EDLSG155H5R5C [32] from Cornell Dubilier) have an input re-
sistance of 30 Ω, this is considerably lower than the input resistance of the EnerChips.
However, this still leads to a 1.5 V voltage drop at a 50 mA charge current, so several
of these supercapacitors need to be placed in parallel. The supplier also has supercapa-
citors available with a lower internal resistance (0.1 Ω), these supercapacitors also have
a lower maximum voltage (2.3 V rather than 5.5 V). It is characteristic of supercapa-
citors to have a low maximum voltage (around 2.3 V), the available supercapacitors
with a higher voltage rating are really two (or more) lower rated capacitors in series
in a single package. Since it are the higher voltage rated supercapacitors that have
the higher internal resistance, it can be reasoned that the higher internal resistance is
caused by the series connection of several supercapacitors. The choice was made for
the supercapacitors with the higher maximum voltage because the supply voltage of
the microcontroller is 3.3 V. With a few modifications it might be possible to use the
other supercapacitors (see later on).

4.3 Implementation 43
Figure 4.3: Battery voltage and Vout of two battery-connected CBC3150
Figure 4.4: Input charge current as a function of the battery voltage

4.3 Implementation 44
Circuit
Figure 4.5 shows the schematic of the solar energy harvesting circuit. The regulator
(LTC3105) has been discussed in section 3.1.3. It can be seen that a storage capacity
of 3 F is used (2 supercapacitors of 1.5 F) with a total internal resistance of 15 Ω.
Since the voltage across the supercapacitor will vary between 0 and 3.3 V, a boost
converter is needed to bring the output voltage of the circuit to a constant 3.3 V. This
output can then be connected to the power combination circuit (see later on). The used
boost converter is the TPS61221 [33] of Texas Instruments, this converter has an input
operating range of 0.7 V to 3.3 V. This converter is chosen for it’s low start voltage,
after an initial start-up (at 0.7 V) the converter can work from voltages as low as 0.5 V.
The circuit had problems with charging the capacitor. As soon as the supercapacitor
voltage reached 0.7V (start voltage of the regulator), the TPS61221 drawed a large
current causing the supercapacitor voltage to drop. The regulator needs a relatively
high start-up current and due to the internal resistance of the used supercapacitors,
this is not possible. This is why in figure 4.5 a 470 µF electrolytic capacitor was
placed together with a switch. The switch acts as a reset button. When the super-
capacitors are completely discharged (a case that normally shouldn’t happen since
correct dimensioning of the supercapacitor and time between transmit pulses should
prevent a complete discharge), the reset button is pressed and they become decoupled
from the LTC3105. The 470 µF capacitor is quickly charged by solar energy. When the
reset button is released, the charge on the capacitor is sufficient to start the TPS61221.
In the schematic another 2 × 470 µF capacitors are used in parallel with the super-
capacitor. These capacitors are there to handle current peaks from the load. During
high current pulses and because of the internal resistance of the supercapacitors, the
voltage at the input of the TPS61221 drops. When the supercapacitor voltage is low,
these current pulses will decrease the voltage even further. This causes the TPS61221
to go in and out of regulation which decreases the efficiency severely. The 2 × 470
µF capacitors provide the current pulses, causing the voltage to drop much less. The
TPS61221 remains in regulation, which benefits the efficiency.
Efficiency
The efficiency of the LTC3105 has already been discussed in section 3.1.3. Depending
on the supercapacitor start voltage (Vcap,start) the LTC3105 efficiency goes from 62.5

4.3 Implementation 45
% to 79.9 % (at Vcap,start = 2.0 V) and higher.
The power efficiency of the TPS61221 boost converter as a function of input voltage
(and at an output current of 95 µA) is plotted in figure 4.6. The efficiency is low at
low input voltages (40 %) and increases with increasing input voltage. The efficiency
has a maximum of 85 % at 3 V. At higher input voltages the efficiency again starts to
drop. Since the TPS61221 is a boost converter, it is not designed for input voltages
higher than the regulated output voltage (3.3V). At input voltages higher than 3.3
V, the converter still works but the efficiency is greatly reduced (< 10%, this is not
shown on the plot). The total TPS61221 energy efficiency during the discharge of the
supercapacitor from 3.3 V to 0.5 V is 71.8 %.
Just as the LTC3105 efficiency improves at a higher supercapacitor voltage (3.1.3), the
efficiency of the TPS61221 improves as well. When the total circuit is designed in such
a way that the voltage across the supercapacitor never drops below 2.0 V, the total
TPS61221 energy efficiency can be as high as 78.2 %. The downside is that this lowers
the usable storage capacity.
The total energy efficiency of both the LTC3105 and the TPS61221 strongly depends
on the minimum supercapacitor voltage. When, during daylight, the solar module
charges the supercapacitor from a voltage of 2.0 V to 3.3 V, the charge efficiency is
79.9 %. When the same capacitor is discharged during the night from 3.3 V to 2.0
V, the discharge efficiency becomes 78.2 %. This makes for a total charge/discharge
efficiency of 62.5 %. When, however, the supercapacitor is discharged to 0.5 V during
the night and has to be charged from 0.5 V during the day, the total efficiency becomes
44.8 %.
I should be noted however that with the circuit as it is now, the charge efficiency doesn’t
matter much on sunny days. The supercapacitor of 3 F is charged easily in 15 minutes
of medium sunlight (30000 lux). After the supercapacitor is charged, the rest of the
incoming energy is wasted. Therefore the total storage capacity should be increased as
not to waste energy and to increase the efficiency. But on cloudy days much less solar
energy is available and a smaller value of the supercapacitor is preferred. The smaller
capacitor charges more quickly and reaches the higher efficiency points faster. If the
intended user is satisfied with a lower storage capacity (and subsequently less frequent
data transmission), the 3 F capacitor is a good choice for every solar intensity. Wasting
residual incoming energy is not a problem if no more energy is needed.

4.3Im
plementation
46
Figure 4.5: Supercapacitors as storage element

4.3 Implementation 47
Improvements
The circuit described above is the one that has been build and tested, but there is
much room for improvement. As it is now, a supercapacitor with a maximum voltage
rating of 5.5 V is being charged only to a voltage of 3.3 V. Since the energy stored
in the capacitor is proportional to the square of the voltage across the capacitor, 2.78
times as much energy could be stored when charging to 5.5 V.
A first method to improve the circuit is to use a buck-boost converter rather than a
boost converter. The reason why this was not done in the first place is because there
are no buck-boost converters available which have a low input start voltage and because
buck-boost converters in general have a lower efficiency. The TPS61221 has a start
voltage of 0.7 V, the best buck-boost converter that was found (TPS63031) has a start
voltage of 1.8 V. It was felt that a lot of energy would needlessly have been wasted
since the supercapacitor would never have been discharged below 1.8 V. However, since
the LTC3105 has much better efficiencies at higher supercapacitor voltages and since
most energy stored in the capacitor is at higher voltages, a buck-boost converter might
be a better alternative. The LTC3105 can charge an output capacitor to a voltage of
5.25 V, the total energy stored on the capacitor will be 2.5 times higher than when the
capacitor is charged to 3.3 V.
Another possibility is, instead of using a buck-boost converter, using supercapacitors
with a lower voltage rating. As mentioned before, the supercapacitors with a higher
voltage rating also have a higher internal resistance. And the higher rated supercapaci-
tors aren’t available at higher capacitance values (several hundreds Farads). If a larger
storage capacity is needed, the choice falls on these lower rated capacitors. One large
supercapacitor could be used since the LTC3105 output is user-defined. While this
makes for a simpler circuit, it is not an ideal solution. It has already been mentioned
that both the LTC3105 efficiency and the boost-converter efficiency is low at lower
supercapacitor voltages.
It is better to place two or more capacitors in series to make a higher rated capacitor
(there are no small, high capacitance, high voltage rated supercapacitors available).
When this is done, balancing circuits are needed. This is because no 2 supercapacitors
are exactly the same and the supercapacitors in series will have a different leakage cur-
rent (at the same voltage). Because the leakage current of one capacitor will have to
flow into the other, the voltage over the capacitors will not be equally divided between

4.3 Implementation 48
Figure 4.6: TPS61221 power efficiency as a function of input voltage, at an output currentof 95 µA
them. The maximum voltage rating might be exceeded in one of the capacitors cau-
sing rapid ageing or even total failure. Linear Technology has components available to
regulate the charging of series supercapacitors but simple regulators might be designed
with a single operational amplifier. All these regulators consume extra power. This
has not been researched further.
Another improvement to the current circuit is to increase the storage capacity by in-
creasing the supercapacitor capacitance. As mentioned before the capacitors are now
fully charged in under 15 minutes direct sunlight (30000 lux). The capacitance should
be chosen so that the supercapacitor just becomes fully charged during the day, so that
no energy is wasted. However, this does not necessarily mean a large increase or even
an increase in capacitance at all. Depending on the average light intensity on the solar
module during the day, the optimal capacitance can differ a lot.
When looking at the schematic of the circuit, it can be seen that a switch is there to
decouple the supercapacitors and to act as a reset for the circuit (cf. section 4.3.2).
A better location for the switch is actually after the supercapacitor and before the
boost converter (TPS61221). A current problem is, at the moment of writing, that the

4.3 Implementation 49
start-up current of the microcontroller is too high for the 470 µF capacitor to handle.
When the switch is placed after the supercapacitors, enough energy will be stored for
the start-up.
As a last improvement, the microcontroller could measure the supercapacitor voltage
and automaticly go into low power mode when it senses that the available energy is
low. This can prevent the start-up problems caused by a completely discharged circuit.
Another possibility is to adjust the time between transmit pulses to safe energy.
4.3.3 Pulse current applications
Although the average current consumption of the microcontroller can be less than 100
µA that continuously can be supplied by the thin-film battery, high current pulses are
needed at each transmission. These currents can be as high as 25 mA (during maximum
power transmission, cf. section 5.4.6). The Cymbet EnerChip is not designed for these
currents and can only deliver about 200 µA without a significant output voltage drop
(> 0.4 V). Because of this limitation a boost capacitor has to be added at the output to
handle the current peaks of the load [34]. The value of the capacitor can be calculated
when the magnitude and duration of the current pulses are known. Figure 4.7 is a
schematic representation of the thin-film battery, boost capacitor and load during a
current pulse.
The value for the load resistance is simply the load voltage divided by the average
load pulse current. Since the microcontroller is working at 3.3 V and the average peak
current is approximately 17.5 mA, the load resistance has a value of 188 Ω. Because
the output resistance (3.2 kΩ) of the EnerChip is much larger than the load resistance
during pulses we can ignore the output resistance in the calculations for the minimum
value of C. At the start of the current pulse the capacitor is charged to at least 3.3V (Vi)
Figure 4.7: Thin-film battery, boost capacitor and load during pulses

4.3 Implementation 50
by the thin-film battery with an open-circuit voltage (Vbat) of 3.47 V (this is the open-
circuit voltage of a fully charged CBC3150). In the calculations the output voltage
vo cannot drop below 3.1 V, this is a safe value since the circuit can work at lower
voltages. As said before the average current is approximately 17.5 mA for a maximum
duration (tp) of approximately 17 ms. During discharge the output voltage is:
vo(t) = Vi · e− t
RL·C (4.1)
From this equation the value of C can be calculated:
C =tp
RL · ln( Vi
Vo,min)
= 1.45mF (4.2)
After the current pulse the capacitor has been discharged to 3.1 V and the capacitor
has to be charged by the thin-film battery to at least 3.3 V when the next current
pulse is drawn. This capacitor charge time (time between current pulses) has to be
calculated. Because there is almost no current consumption between the pulses (a
few µA), the load resistance is now high (with respect to the thin-film battery output
resistance) and can be ignored in the calculation. The equivalent circuit is shown in
figure 4.8.
The capacitor voltage is:
vc(t) = Vbat − (Vbat − Vi)e−t
Rout·C (4.3)
With Vi the initial capacitor voltage (3.1 V), Vbat the fully charged battery output
voltage (3.47 V) and Rout the battery output resistance (3.2 kΩ), the charge duration
(tbp, time between pulses) can be calculated. The capacitor is charged to 3.3 V (Vo).
Figure 4.8: Charging of the boost capacitor with a single thin-film battery

4.3 Implementation 51
tbp = RoutC · ln(Vbat − ViVbat − Vo
) = 3.6s (4.4)
These values of C and tbp are calculated for a certain current pulse profile (Ipulse =
17.5 mA, tp = 17 ms). Depending on the application this profile changes. Shorter and
smaller current pulses result in lower capacitor values and charge times. The capacitor
charge time tbp is linearly proportional to the thin-film battery output resistance. This
value changes with temperature, the value used in the equations is the measured output
resistance at room temperature. At 0°C this resistance can be 3 times higher which
results in a 3 times longer capacitor charge time tbp. Figure 4.9 shows the dependence
of the cell resistance on state of charge and temperature. The cell resistance is further
dependent on the cycle life of the battery. To lower the recharge time it is possible to
place several EnerChips in parallel.
4.3.4 Storage circuit
Power combining
Since several CBC3150 can be connected in parallel (by connecting their battery pins),
it is easy to create a common battery. This battery can be charged by any of the
input sources and acts as the main power source for the microcontroller, sensor and
transceiver. For this thesis, two CBC3150 are used, allowing for simultaneous charging
from two different sources. However, this is easily expandable.
Furthermore two CBC050 are used to further increase the capacity of the battery, re-
sulting in a total capacity of 200 µAh. Figure 4.10 gives a schematic representation of
the EnerChip circuit. The outputs of the two CBC3150 EnerChips are combined with
schottky diodes (200 mV voltage drop at a current of 40 mA) before being connected
with the microcontroller and a boost capacitor. To lower the voltage drop over the
diodes, active diodes were considered (LTC4413). Although the voltage drop and po-
wer consumption during current pulses were lower than with the schottky diodes, the
power consumption between the pulses was significantly higher. For low power pulsed
current applications the passive schottky diodes were the better choice.
It is also possible to use only the output of one of the CBC3150 EnerChips, since one
power source is sufficient. However, by combining and using both outputs, the attai-
nable output current is doubled and the boost capacitor will be charged faster. The
advantage of using only one output is that no diodes will be necessary, which eliminates

4.3 Implementation 52
Figure 4.9: Cell resistance as a function of state of charge (Cymbet application note [34])
the power dissipation of the diode.
Minimising power consumption
When the CBC3150 is enabled (Enable pin high) the internal charge pump is activated
and the battery is being charged. This is of course only the case when an input source
is available and when the battery isn’t fully charged. When this is not the case activa-
ting the charge pump will needlessly waste power and reduce the available energy for
the microcontroller. The reset pin of the device is high when the input is available and
low when it is not, therefore the reset pins of both CBC3150 devices are connected to
their respective enable pins via a large pull-up resistor.
The battery voltage (which is different from the output voltage) is read by the micro-
controller via an ADC input. The battery pin of the EnerChip is connected to the ADC
input of the microcontroller via a 10 MΩ resistor (cf. figure 4.10). This is because the
battery voltage is higher than the microcontroller’s ADC reference voltage and the 10
MΩ input resistance is used together with the external resistor as a voltage divider. To
reduce power consumption a large resistor was needed. When the battery is fully char-
ged, the microcontroller pulls down the enable pins disabling the charging. When after
a while the battery isn’t fully charged the microcontroller releases the enable pins and
it is up to the reset pins to pull up the enable pins. A hysteresis effect is implemented
so that the charge pump isn’t constantly being activated and deactivated. The charge

4.3 Implementation 53
pump will stop working when the battery voltage reaches 4.1 V and it will commence
charging when the battery voltage has dropped to 4 V. Due to the battery resistance
the measured battery voltage during charging is slightly higher than in rest, this extra
voltage drop has to be taken into account when implementing the hysteresis effect.
Efficiency
To calculate the efficiency of the EnerChip CBC3150, the device is charged with a
constant voltage (3.3 V) during 1 hour. After which the EnerChip is discharged with
a constant load. The efficiency is calculated as the ratio of the output energy over the
input energy. Figure 4.11 shows the input charge current of the circuit of figure 4.10
during a 1 hour charge period. Only one input of the circuit is used. Apart from the
beginning (first 5 minutes) the charge current drops linearly over time. This means
that charging a large battery can take a while. The charge current is limited and
even if more energy is available, the battery cannot charge any faster. Charging two
CBC3150 with 1 input source of 3.3V can take up to 2 hours, charging 4 (2 CBC3150
and 2 CBC050) can take up to 4 hours. When integrating the input current curve
(figure 4.11) and multiplying with the charge voltage (3.3 V), it can be calculated that
the total input energy is 3.13 J.
When discharging the battery, the output voltage doesn’t remain constant but it slowly
drops. The output power when discharging the battery with a constant load of 67.5 kΩ
is shown in figure 4.12. At 3.3 V this load results in a current of 50 µA, which is equal
to the average current drawn from the EnerChip when the time between transmissions
is 4 seconds. After about 100 minutes the output power (and voltage) starts to drop
faster and 20 minutes later the battery will not be able to drive the load. If the load is
not removed, the output voltage will drop to zero and go out of regulation. When this
happens the battery first has to be charged a bit before it can be used again to power
a load, even if the battery wasn’t fully discharged.

4.3Im
plementation
54
Figure 4.10: EnerChip circuit

4.3 Implementation 55
The total energy going into the 67.5 kΩ load is 1.11 J, the total energy needed for
charging the battery was 3.13 J. This is an efficiency of only 35.5%. It should be noted
however that the battery isn’t fully discharged, the battery just went out of regulation
because the discharge current became too high for the state of charge at the time.
Discharging with a lower current (and thus a higher load impedance) will allow for a
better discharge as in accordance with figure 4.2. For discharge currents as low as 1 µA
the efficiency can go up to 50 %, but this low current isn’t a realistic value for charging
the boost capacitor that follows. For currents larger than 1 µA, the efficiency is mostly
determined by how far the battery is discharged which causes the higher efficiencies at
lower discharge currents. The efficiency at currents smaller than 1 µA has not been
calculated.
When powering the microcontroller in pulse current applications, the battery will never
be completely discharged. The reason is that the EnerChip output voltage will have
dropped to far for the microcontroller to operate. This means that, apart from the
very first time, the battery will not have to be charged from a completely discharged
state. Since charging the battery becomes more efficient at a higher state of charge,
this will benefit the total charge-discharge efficiency of the battery at the expense of
the battery capacity.

4.3 Implementation 56
Figure 4.11: Input current as a function of time
Figure 4.12: Output power when discharging the thin-film batteries with a 67.5kΩ load

TRANSCEIVER 57
Chapter 5
Transceiver
5.1 Introduction
In the previous chapters, energy harvesting and storage was discussed. The purpose
of this thesis is to power a transceiver with the gathered energy. In this way a fully
autonomous module is created, which can send (and receive) data. This data contains
information about the current environment and about the module itself (e.g. battery
voltage, chip temperature). Measurements on properties of the environment are only
possible if a sensor is added.
In the next sections two different modules will be discussed. The sensor module which
will mainly broadcast its sensor data. And the base station which receives the wireless
information of all the sensor modules and sends it to the PC. The sensor module uses
energy harvesting (EH) to power itself, while the base station uses power from the USB
port of the PC. In the application (see chapter 2) of this thesis only one base station
is used, but this can be increased to enlarge the receiving range.
MicrocontrollerEnergy Harvesting
Sensor Module
SPI bus
Antenna Chip
Sensor __CS
__CS
Storage
Base Station
Antenna Chip
__CS
__CS
MicrocontrollerSPI busUART
Figure 5.1: Schematic of the complete system

5.2 Functional overview 58
5.2 Functional overview
Both modules consist of the same two major blocks (see Figure 5.1), the microcontroller
(µC) and the antenna chip. The first block, namely the microcontroller, is responsible
for retrieving analog/digital input data, digitalising it (if necessary) and processing it.
After this step, the data is sent to the antenna chip. The antenna chip will transform
the digital data into a modulated carrier frequency suitable to drive the antenna. Si-
gnals can also be received. In this case the chip will do the reverse operation and send
the data to the microcontroller.
Taking a look at the sensor module, it is clear that the microcontroller controls the
timetable (when operation starts and sensor data is retrieved, processed and sent).
This happens on a regular basis for which a timeout timer is used. In between two
timeouts, the sensor module goes to a state where it consumes little power. The µC
can also react on interrupts (button, sensor interrupt). In this case the system also
awakes from its sleep state and some data is sent. After every successful transmission
the module waits to receive an answer from the base station, which can contain settings
for the sensor module. It is possible for the base station (BS) to communicate with
different sensor modules. They each have their own SensorID which is included in the
transmitted wireless data.
In the base station, operation commences when wireless data is received. Operation
itself is still dictated by the microcontroller. When data is received, the µC gathers
this data from the antenna chip and immediately sends a (short) answer.
The communication protocol between the BS and the PC is Universal Asynchronous
Receiver and Transmitter (UART). For now this communication is unidirectional. The
data goes from the BS to the PC, but the PC does not reply. This data is processed
and displayed using a matlab Graphical User Interface (GUI).
5.3 Sensor module
This sensor module (SM) is the main purpose of the thesis. It is powered using energy
harvesting as explained in the previous chapters. This module observes a specific
property of the environment and transmits this data wirelessly.

5.3 Sensor module 59
5.3.1 Microcontroller
It is clear that the processing block should be a microcontroller. It needs to run a pro-
gram, have a low power consumption and be very small so an FPGA or small computer
are ruled out. The specifications are listed below:
• Low power: This is the most important specification because the correct opera-
tion of the sensor module relies on the amount of power that the module uses.
This power is limited by the amount that is harvested.
• Low Power Mode (LPM): To limit the power consumption even more, there has
to be a Power-Saving Mode to reduce consumption when the µC is not processing
data. This implies a low power clock which can generate an interrupt to wake up
the system.
• ADC: To measure the battery voltage an ADC is needed. The measurement of
the battery voltage does not have to be very precise (cf. section 4.3.3). As a
guideline, a resolution of 0.01 V is chosen. If the total range is 3.3 V, a minimum
resolution of 9 bits is needed.
• I/O pins: Enough pins have to be available to communicate with the antenna
chip and sensor. The ADC will need 1 or more analog input pins.
• SPI: The controller has to be able to drive the antenna chip. The most common
way to drive chips is by using SPI or I2C. SPI is easier to set-up and is faster.
I2C on the other hand uses less data lines (especially when a lot of components
communicate). Because communication is limited to only a few components, SPI
was chosen. It would be convenient if there is an SPI module on-board. Manual
implementation of SPI will be slower, less power efficient and more complicated.
• Clock frequency: There is no strict condition on speed but the data should be
processed in a reasonable time. There is a clear trade-off: a larger clock frequency
will decrease the energy intensive period, but enlarge the used power. The clock
frequency has to be compatible with the other components (antenna chip, sensor).
One of the solutions was a Cortex-M0+ Processor. The power needed stated on their
website [35] is very low (52µW/MHz), but this only includes the core, which is not a
complete controller.

5.3 Sensor module 60
A better solution is to choose a microcontroller from Texas Instruments because it is
well known for its low-power performance. Other advantages when using a component
from Texas Instruments:
• Tools: There are a lot of tools available from TI to easily program the microcon-
troller e.g. CCS[36], simpliciTI, Grace
• Online support: The datasheets are well-documented and there are lots of active
forums to discuss problems.
• Offline support: There are people in the lab who have experience with working
with TI’s MSP430 microcontrollers.
• Own experience: One of the authors already programmed some simple programs
on other devices from the MSP430 series.
• No overkill: There are other microcontrollers that can also provide correct func-
tionality, but they contain more options then necessary (and consume more po-
wer). This causes them to be more expensive and less suitable for our low cost
application.
• Availability: When buying the antenna chip (cf. section 5.4.2), an MSP430
microcontroller was included (AIR Module BoosterPack), so this means that this
type of µC will be a very good match with the transmit chip.
Eventually the MSP430G2553 was selected which satisfies the specifications (see table
5.1 and the datasheet[37]. The inexpensive, easy to use launchpad development tool[38]
was purchased, to program the MSP430. The launchpad with a plugged in microcon-
troller is shown in figure 5.2. The launchpad has a pin header to plug on an AIR
Module BoosterPack (cf. section 5.4.2). There are multiple LPM’s available. Each
of them shuts down more or less parts of the µC (CPU, clocks, DC generator). An
internal very-low-power low frequency clock is available. This clock will be used to
generate an interrupt to wake up the system.
This chip is easily programmed using Code Composer Studio[36] (CCS) which uses
C++ as language. It was also possible to use IAR VisualState[39] to program our
microcontroller, but this program is less user friendly (less support is available on the
net and in the lab). CCS is a tool from Texas Instruments, who also produced the

5.3 Sensor module 61
Figure 5.2: Launchpad Development Tool with MSP430G2553
Table 5.1: Properties of MSP430G2553
Power Consumption (Typical) (3V3)Active 230 µALPM3 with interrupts 0.5 µAADC resolution 10 bitI/O pinsDigital/Analog 8Digital 82 communication blocks possible: SPI, I2C, UARTMaster clock frequency 16 MHz (divider downto 1 MHZ)Low power clock frequency ∼12 kHz

5.3 Sensor module 62
selected chip. The tool and the chip will be attuned.
There is another tool from TI called simpliciTI[40], which enables to easily program
the MSP. This tool uses functions which are quite complicated. Some functions are
black box functions. This is not very desirable because it is necessary to know exactly
what is happening at any given moment. This makes debugging of this code very hard.
Eventually the decision was made to abandon this tool and implement the functions
from scratch. In this way, only the functions needed are programmed and the flash
memory of the microcontroller will not contain unused functions. Abandoning this tool
also facilitates debugging and gives the authors a better understanding of the processes.
The programming itself happens via UART which makes use of the internal Bootstrap
Loader (BSL) program of the µC.
5.3.2 Antenna chip
The antenna chip drives the antenna. The specifications are as follows:
• Low power: As with the microcontroller, this specification is also the most im-
portant. The chip will only be sending now and then to save power so the sleep
mode current has to be very low. The power consumption when active is less
important but should not exceed 50 mA (at 3.3 V) to limit the size of the boost
capacitors on the sensor module board (cf. section 4.3.4).
• Carrier Frequency: The carrier frequency should be situated in a frequency band
which is usable in the countries where the device will be used. To determine
this, the european table of frequency allocations[41] is used. The carrier should
also have good propagation properties. Low frequencies have better penetration
through e.g. walls. They also propagate further in the environment until a
specific attenuation is reached. On the other hand, higher carrier frequencies
typically have a higher data capacity. A carrier between 100 MHz and 1 GHz
has these required properties.
• SPI: The chip has to be compatible with the µC, so SPI communication must be
possible.
The CC110L[42] from TI satisfies the specifications. This chip is a good match with a
TI microcontroller. The chip is well-documented and online support is available. This

5.3 Sensor module 63
chip is integrated in the AIR Module Boosterpack [43] which is easily connected to
the launchpad of the MSP430 using 2 headers of 10 pins. On the boosterpack, there
are also some patches for peripheral components. The microcontroller that was chosen
is included when purchasing the boosterpack. The two components are designed and
tested to work with each other. The specifications for the antenna chip are fulfilled
with this choice (see table 5.2);
Figure 5.3: CC110L AIR Module Boos-terPack
Figure 5.4: Launchpad with Booster-pack plugged in
5.3.3 Sensor
There is a large variety of sensors that can be connected to the module to create a
useful application. A very promising application is discussed in chapter 2.
This application requires an accelerometer with free-fall detection.
Table 5.2: Properties of CC110L
Power Consumption (Typical) (3V3)RX/TX mode (not sending/sensing) ∼15 mARX/TX mode (sending/receiving data) ∼27 mASleep mode 0.2 µASensitivity ∼-115 dBm (depends on current and carrier)Maximum SPI clock 10 MHz

5.3 Sensor module 64
The specifications for the accelerometer are:
• Low Power: This is again the most important specification because only a limited
amount of power is available. The sensor has to be operational at all times, since
a free-fall situation must be detected at any given time. The power consumed by
the operational sensor has to be of the order of the power consumed by the µC
in LPM.
• Free-fall detection: It is necessary to have an interrupt which triggers when a fall
occurs. Otherwise the microcontroller should continuously retrieve data from the
sensor and process it to check for free-fall. This would require too much power.
• Compatible: Because the antenna chip and the µC communicate with SPI, it
would be convenient if the accelerometer would use the same protocol (and data
rate). The supply voltage should be the same as the other components (3.3 V),
which makes the communication and supply circuit easier to implement.
The ADXL362 from Analog Devices is the lowest power MEMS accelerometer on the
market. It performs better than its competitors from other companies such as STMi-
croelectronics, Kionix and Silica. Especially the power consumption is much lower.
The current stays well under 4 µA, even for output data rates of 400 Hz. The com-
ponent is well documented and meets the specifications. A schematic overview and
package is shown in figures 5.5 and 5.6.
The analog data from the 3-axis MEMS sensor (after demodulation and anti-aliasing)
is digitalised using an internal 12-bit ADC. This way, acceleration data is easily sent
to the µC and its 10-bit ADC does not have to be used.
The maximum absolute range is 8g (with g the standard gravity). A larger range would
be overkill and not needed for the application used in this thesis.
Free-fall detection uses the principal of inactivity detection. Inactivity means that
there is no (or less) acceleration on all the measurement axes at the same time for a
certain duration (cf. section 5.4.2). At normal static operation, the only acceleration
is gravity. If the device is in free-fall, this acceleration has no effect, so in theory
acceleration data should be zero on all axes. It is unlikely that non-zero results are
obtained due to measurement errors. So a free-fall upper bound has to be chosen. If
the acceleration drops below this threshold, the device is in free-fall.
A summary of the most important properties of the sensor is given in table 5.3. Note
that the applied supply voltage is 2V. When the sensor is plugged in the system, the
supply voltage will be 3V3, so the used power will be somewhat higher.

5.4 Implementation sensor module 65
Figure 5.5: ADXL362 Schematic overview Figure 5.6: ADXL362 Package
Table 5.3: Properties of ADXL362
Power Consumption (Typical) (2V)Operational mode, sample frequency 100 Hz 1.8 µAMotion activated wake-up mode 270 nAStandby mode 10 nAMeasurement dimensions 3 axesAdjustable range [g] ±8 downto ±1Resolution 1-4 mg/LSB (depends on the range)Maximum SPI clock 5 MHz
5.4 Implementation sensor module
The master component of our sensor module is the microcontroller, it drives the actions
of the other components (sensor and antenna chip).
5.4.1 Connections and communication
The µC receives and processes inputs from the sensor, a button, a circuit voltage level
and the antenna chip.
All inputs are digital except the voltage level. This voltage level is measured at the
battery output of the thin-film batteries. The internal 10-bit ADC is used to handle
this input. Using this measurement, good functionality of the harvesting circuit can
be ensured. When this voltage exceeds 4.1V the batteries do not have to be charged.

5.4 Implementation sensor module 66
A digital output which is connected to the thin-film batteries will disable charging.
Charging will be enabled when the voltage drops below 4V.
Another input is a send button. Whenever this button is pressed, the system will
transmit its data regardless of the regularly scheduled transmissions. This input uses
an interrupt to see if the button is pressed.
The communication between the µC, the antenna chip and the sensor is implemented
using 4-pin SPI. The master (µC) dictates the actions of the slaves (antenna chip or
sensor). The 4 pins include an active low chip select pin (CS). Data can only be
exchanged when the master puts this pin low and generates a (short) clock sequence
on the Clock pin (CLK). Data from the microcontroller to the antenna chip goes on
the Master Out Slave In line (MOSI). When data needs to go in the other direction,
the Master In Slave Out line is used (MISO). The rising edge of the clock is used to
sample the data and the falling edge to change the voltage level of the lines. Every
clock sequence is eight periods long so this corresponds with one byte of data. Further
information about SPI can be found on wikipedia [45].
The sensor communicates in the same way as the antenna chip. It uses the same SPI-
bus but a different Chip Select pin (5.1) so that it is clear to whom the microcontroller
is talking.
The configuration and selection of the pins on the µC depends on the functionality of
every pin. The communication pins of the SPI-module (CLK, MISO, MOSI) have a
fixed location. The analog input has to be connected with a pin from the P1 group This
is illustrated in figure 5.7. The specific connections are further explained in section 6.2.
5.4.2 Settings
Microcontroller
The microcontroller has an adjustable Master Clock. A lower clock frequency results
in a lower power dissipation but higher processing time. The total energy consumed
stays constant (power x time). This can be derived from a graph in the datasheet of
the MSP430G2553 [37]. This graph is shown in figure 5.8.
Lower clock frequencies are more robust against supply drops. E.g. the maximum
clock frequency (16 MHz) needs a minimum supply voltage of 3.3 V, while 6 MHz only

5.4 Implementation sensor module 67
Figure 5.7: Configuration pins of the µC, fixed SPI and analog inputs
needs 1.8 V. For the use of this thesis, the clock frequency does not have to be very
high. It suffices to take the minimum DCO frequency of 1MHz which causes maximal
robustness.
Apart from the clock system, the first major block which is enabled in the µC is the
10 bit ADC. A 2.5 V internal reference is taken, which also determines the maximum
measurable voltage. The microcontroller will manually activate the ADC and sample
the analog data. In most applications the ADC is clock sampled (automatic sampling
every x µs). This is not be very useful because only when data is sent, should the
ADC determine the voltage at the input. An extra timer would also mean more power
consumption.
The second enabled block is the SPI block. This block provides communication with
the antenna chip. The SPI bus is clocked at the maximum available frequency (1 MHz).
The bitrate is chosen to be 100 kbps.
Antenna chip
Every time the sensor module starts up, the µC uses SPI to change the default values
of the registers of the antenna chip. These registers determine the operation of the
chip. Most settings are found using SmartRF Studio [46]. The choice and meaning of
the most important settings are explained below:

5.4 Implementation sensor module 68
Figure 5.8: Active Mode Current vs DCO Frequency
• Transmit power: This property determines the functional wireless range. Prac-
tical measurements are given in table 5.5 of section 5.7.2. The perimeter of the
range is not a clear line but consists of a grey zone where coverage is not gua-
ranteed but most of the packages arrive correctly. The start and end of this zone
is shown. At the end of the grey zone, there is little or no coverage. Indoor
measurements depend mainly on the type of building and specific ground plan.
The maximum power that is allowed is determined by the FCC (Federal Commu-
nications Commission). A summary of these rules for our carrier frequency (see
next setting) is given in [47]. Following these rules the maximum transmittable
power is 30 dBm since the maximum antenna gain is 0 dBi [48].
• Carrier Frequency: There are three possible frequency bands which can be used.
The first band reaches from 300 to 348 MHz. According to European ECC
(Electronic Communications Committee) [41] most of this band is intented for
air control (defence and civil) and radio astronomy. This band is not suitable for
the system. The second band (387 - 464 MHz) has more opportunities. There is
room for Personal Mobile Radio (PMR), amateur radio and there is an ISM-band

5.4 Implementation sensor module 69
(Industrial Scientific and Medical) (433.05 - 434.79 MHz). In the last band (779
- 928 MHz) there is some room for alarm systems. The best option is the second
band and more specific the ISM band. Transmitting in this band is free of charge.
Note that in the US the 915 MHz ISM band can also be used.
• Modulation format: GFSK (Gaussian Frequency-shift keying) is used. This code
does not suffer from amplitude fading in contrast with ASK (Amplitude-shift
Keying). GFSK has a higher spectral efficiency than FSK due to (Gaussian)
pulse shaping. This shaping removes the sharp transitions from FSK. The relative
distance between 2 symbols is larger than 4-FSK which improves the BER.
• Data rate: The data rate does not have to be very high. At 250 kBaud, the
data is frequently bad received. A very low data rate (2.4 kbaud) causes a long
unwanted delay (3,33 ms/byte) during high power consumption. There is a clear
trade-off between robustness (low data rate, which causes higher sensitivity: table
7 in the CC110L datasheet [42]) and power consumption (high data rate, small
delays). A data rate of 100 kBaud is used.
• Sensitivity: It is possible to reduce power consumption, if the sensitivity of the
sensor module is reduced when sensing and receiving. This reduced sensitivity
will not decrease the operational range of the sensor module because the BS will
be sending at its maximum power +10 dBm since the BS does not depend on
energy harvesting. It is connected to a computer. The chosen data rate results
in a sensitivity between -95 dBm and -104 dBm according to table 7 from the
datasheet[42].
Sensor
At start-up the microcontroller also sets the registers of the sensor to enable free-
fall detection, and start acceleration measurement. The most important settings are
explained below:
• Inactivity threshold: Free-fall detection uses this threshold. When the accelera-
tion on all axes is lower than this threshold for a certain amount of time (see
inactivity time), an interrupt is generated. For now this value is set to the large
value of 600 mg to enable easy debugging but this has to be optimised for real
life scenarios.

5.4 Implementation sensor module 70
• Inactivity time: This register is also used by free-fall detection. This value states
the time (number of samples) for which the acceleration should be below the
inactivity threshold. This value is set to 30 ms, but has to be optimised for real
life events.
• Measurement range: The range can be set to ±2g, ±4g or ±8g. For the appli-
cation that is chosen, the three options have enough resolution to perform well.
For now the range is set to the maximum (±8g) but this can be changed. This
can be useful when e.g. data has to be read and processed using an algorithm to
determine if the fall is legitimate (see 5.9).
• Output data rate: This determines the sample rate at which the data is placed
into the FIFO buffers. This rate is also determined by the conditions the data
should have for a potential algorithm (legitimate fall).
Energy optimisation
After a functionally correct system was constructed, changes were made to make the
design less power consuming. The most important changes are listed below:
• Burst sending: It would be very energy inefficient to keep the µC and antenna
chip running at all times. When the system is inactive, the antenna chip should
be disabled and the µC is set to a Low Power Mode. There are 4 LPMs possible.
LPM4 is the least consuming because all clocks and the CPU are disabled and
the system only reacts on interrupts. This mode is not suitable because for the
purpose of thesis, the system has to send data on regular basis. A better solution
is LPM3. In this mode, a very low power clock can be active. It will drive Timer
A. Using this timer, it is possible to generate a regular timeout interrupt that
awakes the system. The low frequency auxilary clock (ACLK) is used (12 kHz).
When going into LPM3, a register counts the clock cycles and triggers when a
preset value is reached. In case this value is larger than the register capacity,
multiple shorter timeouts are used to reach the desired longer timeout value.
The system can also be awakened using a sensor interrupt (cf. section 5.3.3).
A third way to awake the system is by using the interrupt of the button. After
these forced interrupts, the timeout timer is reset (timeout will occur again after
the preset value of before).
• Sampling rate: The time in between two bursts is determined by the available
power. When data is sent (received) over the antenna, the amount of immediately

5.4 Implementation sensor module 71
needed power is larger than the amount of power being harvested. So in between
2 samples, enough power has to be stored (in boost capacitors) to absorb this
sudden burst. After every burst, the boost capacitors are (slowly) recharged to
3.3V using the thin-film batteries.
• Delays: To generate delays, the intrinsic function ( delay cycles()) is not always
used. This would consume more energy than using a clock with an interrupt.
The low power auxilary clock (12 kHz) is mapped on Timer A. For large delays
(see above: Burst sending), LPM3 can be used.
• Ports: When a port of the microcontroller is not used, it will be placed to the
output direction and pulled to GND. This avoids extra power consumption.
• Register writing: Normally the registers were written sequentially. Every register
has its own write operation: CS goes LOW, write the address, write the register
data, CS goes HIGH. This can be done much faster and efficient using burst
register access. This means that all the registers with consecutive addresses are
written in one write operation. After CS goes low the first adress is written with
a burst bit high. Now the register data is written one by one. The write address
is incremented internally in the antenna chip. If a lot of registers are written this
way, the total time (power) is halved.
5.4.3 Coding
A schematic overview of the implementation is displayed in figure 5.9. The different
blocks are discussed below.
Initialisation This block will properly set the settings of the microcontroller and the
registers of both the accelerometer and the antenna chip.
The settings for the µC are determined using Grace[49]. This is a pre-installed plugin
in the newest versions of CCS (5.1 and later). It is possible to graphically configure the
options, modules and I/O pins of the microcontroller. When a build is commenced,
CCS will create a main Grace file with multiple subfiles in which the correct values
are written to the correct registers. After this, the next lines of code initialise the
accelerometer. The registers will be written using the SPI-bus.
The registers of the antenna chip are set in a similar way in the next step.
Now the environment is set and interrupts can be initialised and enabled.
A SensorID is created. The four least significant bits are fairly random generated using
the last bits of the ADC. The four most significant bits are hard coded. The chance

5.4 Implementation sensor module 72
Initialisation
Operation
Read and ActionsFlush buffers
LPM
Wake up
Interrupt
Flush buffers
Set registers Antenna Chip CC110L
Set registers Accelerometer ADXL362
Configure the MSP430 settings (Grace)
µC to LPM3
Reset interrupts
Control system (ADXL362 and Batteries)
Disable µC modules (SPI, ADC10)
Control system (ADXL362 and Batteries)
Disable/Sleep CC110L
Abort LPM3
Enable µC modules (SPI, ADC10)
Enable/Wake CC110L
Wait for Answer (~10ms)
Send data (battery level, interrupt)
Check thin-film batteries
Generate SensorID
Initialise and enable interrupts
YESNO
Figure 5.9: Schematic overview code for the sensor module

5.4 Implementation sensor module 73
of two sensor modules having the same sensorID is 7%. If the IDs are equal, reset
one of the SMs and another ID will be created. This code is a temporally measure to
facilitate programming (the same code can be used for the two sensor modules). In
real life situations (more sensor modules) the sensorIDs will hard coded differently for
every SM or a larger random ID is generated. Using the sensorIDs, the BS is able to
distinguish between the different sensor modules (cf. sections 5.5 and 5.8).
Operation This block contains the processing part of the program. Before the code
commences, a while loop is started which includes all the following steps.
First the analog input (from the thin-film batteries) is checked, whether or not the
value exceeds the limit to which the batteries need charging. Whenever the battery
voltage exceeds 4.1 V, charging is disabled. When this voltage drops below 4 V charging
should be enabled. This enabling/disabling happens in the LPM block.
In the next step data is sent to the FIFO buffer of the antenna chip and a transmit
signal is given to this chip. This data contains the SensorID and information about
button pushes, free-fall detection and the measured voltage level from the previous
step. Other information can be added, e.g. data about the acceleration history around
a free-fall event, temperature.
After every transmission, the microcontroller will set the antenna (chip) to receive
mode for about 10 ms. In this time an answer from the BS can be received.
When an answer is received, the data will be read from the FIFO buffer of the antenna
chip and then processed e.g. changing transmit power or transmission interval. If not
(or an erroneous answer) the FIFO buffers are flushed.
LPM In this part of the code the different components of the module are disabled
or set to a Low Power Mode.
The first component is the antenna chip. A power down command is given. The power
down state will stay active until the chip select pin goes low.
In the next lines of code, the SPI and ADC modules are disabled.
The next step is to make sure the accelerometer is in a correct state, so that it can
generate an interrupt whenever a free-fall is detected. Another action in this step
is enabling/disabling of the charging of the batteries according to the result of the
operation block. After this, interrupts are enabled in the microcontroller. It will use
these interrupts to awake from its LPM.
In the last step of the LPM block, the microcontroller puts itself in sleep mode. LPM3
is used (cf. section 5.4.2).

5.4 Implementation sensor module 74
Wake up This block will wake the system after an interrupt was observed. Note
that the microcontroller can still detect interrupts while it is in the sleep state. The
first part of code will wake the microcontroller. This happens inside the corresponding
interrupt routine (fall, button, timer). Less than 1 µs is needed (see datasheet[37]).
The modules which were disabled in the previous block are rebooted. Grace recom-
mends a long delay (30 ms) to ensure that the reference voltage is stable.
In the next line of code, an SPI command is sent to awaken the antenna chip. The
specific command does not matter because, the wake up mode is triggered on the tran-
sition of the chip select line. After this step, the system goes back to the operation
block and starts again.
5.4.4 Coding and testing issues
There were a lot of small problems when coding and testing the functionality which
increased the development time of the code. Some of them are explained below.
• RFstudio problems: A certain register was set to enable extra communication
with the microcontroller. This pin was set to a low output on the microcontroller
(to reduce power consumption). Whenever the antenna chip wanted to send
something on this pin it caused a short, which resetted the system. The values of
the registers are noted in a mix of hexadecimal and decimal values without any
indication.
• CCS Debug: Debugging of the code using the debug function of CCS can some-
times lead to very strange situations when the code is stopped. Eventually the
debug functionality was abandoned and errors were visualised using the digital
oscilloscope.
• Calibration: Now and then, the antenna chip has to calibrate its oscillator. Du-
ring calibration, no commands can be sent to the chip. In the first versions of
the code, this behavior was not taken into account. This caused malfunctioning
of the antenna chip. The solution for this problem is repeatedly polling to the
antenna chip to check its (calibration) status until calibration is over.
5.4.5 Board
For testing the transceiver separately (without Energy Harvesting and Storage) a de-
velopment board was used, namely the AIR Module Boosterpack (cf. section 5.4.2).
It is possible to plug the microcontroller onto this board which gives us a small and

5.4 Implementation sensor module 75
testable PCB. The available patches were used to solder pull up resistors, decoupling
capacitors, a button and a sensing wire. This board is shown in figures 5.10 and 5.11.
Figure 5.10: Simple board sensor mo-dule with accelerometer
Figure 5.11: Simple board sensor mo-dule without accelerometer
5.4.6 Power performance
When the transceiver is in low power mode the power consumption is constant. The
system is powered by a 3.3 V supply and the current is 2.7 µA . This results in a power
of about 9 µW. Most of this current is consumed by the active accelerometer.
When data has to be sent, the current increases to a couple of mA and follows a cer-
tain profile (a burst) depending on the presence of a base station within reach. These
profiles (transmit power 0 dBm) are displayed in figures 5.12 and 5.13. Note that the
current that runs into the microcontroller is negligible compared to the peak currents
caused by the antenna chip.
The two profiles are quite similar but they differ in the fact that in the first one an
answer was received. They both have the same start-up peak. This current is used
to wake up the different components and enable the internal oscillators. After this
peak, a smaller current is consumed (about 1.7 mA). This is caused by the internal
voltage regulator and the crystal oscillator of the antenna chip. After a while (3 ms)
the system is ready to send its data. The send peak consist of 3 stages. The first stage
is a current level which corresponds with the FSTXON state (a transitional state). In
this stage the frequency synthesiser is running and calibration can be performed (8.4
mA). The next stage (about 16 mA) is again a transitional state in which the carrier is
prepared to drive the antenna. The actual sending happens in the third stage, where
a maximum of 26 mA is consumed.
After this, the microcontroller commands the antenna chip to listen to an answer.

5.5 Base station 76
Whenever a BS is in range, there are again 3 stages in the receive profile. The first
one is (analog to the first send stage) a calibration stage (8.4 mA). In the second stage
the antenna is sensing for an answer for a maximum of 10 ms at a current of about
16 mA. This waiting time is a set in the microcontroller. If an answer is received the
current increases to 25 mA for a short time and then decreases to 1.7 mA. This current
stays constant until the listening time (10 ms) is over. After this, the antenna chip
shuts down. If no BS is present the full 10 ms of listening time is used to sense and
the current remains constant at 16 mA.
The energy used when sending and receiving can be calculated by integration of the
current (formula 5.1).
E =
∫P · dt = 3.3V
∫I · dt (5.1)
This integration is performed discretely. When the BS is in range, the consumed energy
of one burst is 0.5 mJ. When no answer is received this energy is 0.9 mJ (due to longer
sensing). This energy burst has to be delivered by the boost capacitors (see 4.3.3) at
the supply voltage in order to prevent an excessive voltage drop of the supply.
5.5 Base station
The second module is the base station. This module is designed to receive the data
from the sensor modules. After every reception a short answer is sent back to the
sensor module. This device is not power limited since it is powered using the computer
via the USB port so no special low power modifications have to be made.
5.5.1 Components
The module consists of the same two important components as the sensor module: the
µC and the antenna chip (cf. figure 5.1). This facilitates the interchangeability of the
components of the BS and the sensor module.
5.6 Implementation BS
The microcontroller dictates the actions of the antenna chip and communicates via
UART and USB with the computer.

5.6 Implementation BS 77
Figure 5.12: Current profile sensor module, BS in range, 0 dBm
Figure 5.13: Current profile sensor module, no BS in range, 0 dBm

5.6 Implementation BS 78
5.6.1 Connections and communication
The only inputs the µC of the BS has, are the ones provided by the antenna chip and
a button press. There are no sensors attached and no voltages have to be measured.
The microcontroller and the antenna chip communicate in the same way as in the sen-
sor module (SPI).
The button can be used to alter the answer towards the sensor module after a successful
reception. This can imply e.g. a change in transmit frequency or power from the sensor
modules. There is also a reset button available on the launchpad which grounds the
RST (figure 5.7) pin if pushed. The microcontroller will reset and start at initialisation
(cf. section 5.6.3).
The communication between the module and the PC happens using the UART module
which is also on-board the µC. The microcontroller stays plugged into the Launchpad.
The USB-interface from this launchpad provides a 9600-Baud serial UART connection
with the PC. For the use of this thesis, the microcontroller only sends data towards
the computer because it only has a monitoring function.
5.6.2 Settings
The microcontroller settings are not the same as in the sensor module.
E.g. in this module the 10 bit ADC is not enabled, because no voltages have to be
measured.
The clock is set to 1 MHz. This allows a fast enough processing speed. If at a later stage,
more processing has to be done (algorithms), the clock frequency can be increased. This
can be done freely because now a stable (no drops) supply voltage is available (PC).
The SPI block is also active and communicates with the antenna chip. The frequency
at which it works, is the frequency of the master clock of the microcontroller. For
faster communication, this clock can be increased to a maximum of 10 MHz. This is
of course only possible if the highest clock frequency of the microcontroller is changed.
The low power low frequency clock (12kHz) is not active because no long delays are
needed and enough power is available to use the intrinsic function delay cycles().
The UART block is enabled to communicate with the computer. The baud rate is
chosen to be the maximum 9600 Baud. It would be less time consuming if it were

5.6 Implementation BS 79
higher but the rate is limited by the capacity of the USB interface of the launchpad.
A practical solution for this waste of time can be found in section 5.6.3.
The registers of the antenna chip are set to the same values as in the previous module.
There are however some small differences. The most important ones are:
• Transmit Power: Power consumption is not the limiting factor in this device so
a higher output power is chosen (+10dBm).
• Sensitivity: The reduced sensitivity setting is not used which will give a +2dB
sensitivity increase compared to the sensor module.
5.6.3 Coding
A schematic overview of the code for the microcontroller is given in figure 5.14. The
code now consists of two major blocks.
Initialisation This first block is only executed once at system start-up. The first
step is to initialise the MSP430. Grace facilitates the code for configuration of the clock
module, the I/O pins and the SPI module. The next step is to set the registers of the
antenna chip. The SPI communication channel is used to send the write commands.
The registers are determined using SmartRF Studio [46].
Now that the system is set, interrupts can be enabled. There is only one interrupt,
which is the button.
Operation The second block is started with the initialisation of a while loop. This
while loop causes a repetition of the operation block. The first step of the block is a
check whether or not data is received. If not, the system does nothing and skips the
four following steps. If data is received, which can be detected by a change in status
of the antenna chip, the data is read from the FIFO buffer using the SPI interface. In
the initial code the data which was received, is immediately sent to the computer using
UART. After UART communication ends, an answer is sent to the sensor module. Ho-
wever, because the UART communication takes a lot of time, the last two steps were
switched.
After the received data is stored on the microcontroller, the answer for the sensor
module is sent to the antenna chip and transmit mode is enabled. While the chip is

5.7 Performance 80
transmitting, the UART communication is executed. This results in a parallel UART/-
transmitting state which decreases the time that the BS is unable to receive data from
other sensor modules.
The UART communication (only 4 bytes, equals about 4.5 ms) takes less time than
sending the wireless data (about 5 ms), so when the UART communication is complete,
the microcontroller repeatedly checks the status of the antenna chip until it is IDLE
again (for about 0.5 ms). This event means that the transmission of the wireless data
is complete.
The last step is performed in every loop. This step checks if an erroneous byte was
received. If so, the buffers of the antenna chip are flushed and the system is reset to
receive mode.
A delay is added at the end which determines the polling frequency.
5.7 Performance
5.7.1 Communication
Implemented communication algorithm
For now, the communication algorithm between the base station and the sensor modules
is quite basic. It is only half duplex so two modules (BS or SM) cannot send at the
same time.
During normal operation of the system, the BS will be in receive mode. There are only
specific moments when the BS will send. Every time it receives data from a sensor
module, the BS is able to respond with a short answer which includes some settings
for the corresponding sensor node.
During normal operation of the system, the sensor nodes are in low power mode. While
in LPM, they cannot receive or send data. Every node will awake when its preset timer
ends or when a forced interrupt is triggered (button or fall sensor). The node sends
its data message and waits a couple of milliseconds for an answer. When an answer is
received, it will be processed. Eventually the node will go to LPM again.
In figures 5.15 and 5.16 this communication is visualised by monitoring the data ac-
tivity between the components of the different modules. One communication burst is
displayed. The allocations of the data lines are displayed in table 5.4.

5.7 Performance 81
Initialisation
Operation
Flush buffers
Set registers Antenna Chip CC110L
Configure the MSP430 settings (Grace)
Delay
Check if data has been received
Initialise and enable button interrupt
NO YES
Do nothing Read data from FIFO
Send data to FIFO
Send UART
Wait for IDLE
Flush buffersCheck for error buffer byte
Figure 5.14: Schematic overview of the code for the base station
In the first part of the communication (figure 5.15) the sensor module wakes up and
puts its data in the FIFO buffer of the antenna chip (SPI). This data is then transmit-
ted by giving the correct SPI command. The microcontroller then checks repeatedly if
the antenna chip is still sending. If the transmission is completed, the antenna chip is
set to receive mode and the microcontroller waits for 10 ms.
When the data is received by the antenna chip of the base station, the next poll will
trigger the microcontroller. The µC requests the data from the FIFO buffer from the
antenna chip (SPI). Next, new data will be send to the antenna chip and transmit
mode will be activated. While the antenna is transmitting, the received data (from the

5.7 Performance 82
Table 5.4: Allocation of the data lines
Digital probe Data line
D0 Sensor module: SPI SOMID1 Sensor module: SPI SIMOD2 Sensor module: SPI CLK
D3 Sensor module: SPI CSD8 Base station: UART TXD9 Base station: UART RXD10 Base station: SPI SOMID11 Base station: SPI SIMOD12 Base station: SPI CLK
D13 Base station: SPI CS
sensor module) will be send to the PC using UART. Once this is done, the microcon-
troller will check if the wireless transmission has been completed.
In the second part (figure 5.16) the transmission at the base station is over. The BS
goes to receive mode again and starts polling again for new received data.
At the sensor module side, the data from the BS is received. After the predefined
delay (10 ms), the microcontroller checks whether or not the antenna chip contains
valid data in its FIFO buffer. This data is read and processed. In the next step, the
sensor module goes to sleep mode.
Possible communication conflicts
The base station cannot send while the modules are sending. Any data from a sensor
module while the BS is transmitting will not be received and will be lost. The sensor
to which the answer from the BS was intended will get either erroneous data, the data
from the sensor module or the correct answer from the BS. Which one depends on the
distance between the components.
Another problem that can occur is when two sensor modules send at the same time,
the data of at least one (the weakest) will be lost.
Using another, more sophisticated communication algorithm will solve those problems
(cf. section 5.9).

5.7Perform
ance83
Figure 5.15: Part 1: SPI and UART communication of SM (D0-D3) and BS (D8-D13)
Figure 5.16: Part 2: SPI and UART communication of SM (D0-D3) and BS (D8-D13)

5.8 Matlab 84
5.7.2 Power
The transmit power of the sensor module determines the reception range. The base
station replies with full transmit power, so the sensor module does not have any pro-
blems with receiving the answer. In table 5.5, some possible transmit powers are listed
with their corresponding ranges. The range is characterised by two lengths, the start
and end of the grey zone (cf. section 5.4.2). Note that these measurements were per-
formed outdoor with some reflection of the ground and surroundings.
It can be concluded that a power of 0 dBm has a large enough range for the applica-
tion in mind. Nevertheless, this range will decrease drastically when measured indoor.
Some measurements were performed indoor. At 0 dBm, the signal was received across
multiple rooms.
5.8 Matlab
The base station sends its data to the computer via UART. This data is received and
processed using Matlab. A GUI is used to visualise the received data.
On start-up of the GUI, the variables are initialised and the interface of figure 5.17 is
shown. First of all the correct COM port has to be set at which the BS is connected.
When the START/STOP button is pressed a while loop commences that opens a serial
communication at the specified port. Then the code will repeatedly check if a byte was
received and if this byte is equal to 0. The data from the BS always starts with a zero
byte followed by a SensorID that differs for every sensor module. This way, Matlab
can differentiate between the different modules. After this overhead, the real data is
retrieved and analysed. For now, there are only 2 bytes of data. The first bit represents
the presence of a button press. The second bit determines whether a fall has occurred.
Then there are 4 unused bits. The last 10 bits are needed to represent the voltage level
of the thin-film batteries. The voltage levels of the batteries from the sensor modules
are plotted in the graph. If a fall or button press occurs, it will be indicated on the
graph (respectively a star or a circle). The serial communication is closed whenever
the START/STOP button is pressed again. Reset will restart the GUI and erase all
the data.
5.9 Improvements
In this section, some of the features are discussed which couldn’t be, or were not yet,
implemented as well as some additional possibilities of the modules. The features which

5.9 Improvements 85
Table 5.5: Transmit power versus receive range at 433 MHz in an outdoor situation
Transmit Power [dBm] Start grey zone [m] End grey zone [m]
-30 7 13-20 20 27-15 32 50-10 50 70-6 65 1000 110 150
Figure 5.17: GUI

5.9 Improvements 86
were not optimised entirely are caused by the limited time frame of this thesis. The
transceiver is only a part of the entire system. Debugging the system also costed a lot
of time e.g. getting SPI to work using simpliciTI (which was abandoned) and creating
an initial simple communication link. Below, some of the possible improvements are
listed:
• Adapt Power: It is possible to adapt the send power of the sensor module by
writing to the Power Table register. If no answer is received from any base
station, the sensor module can opt to increase its own transmit power on the
next wake-up to try to reach a more distant BS. If a succession of successful
interactions between the BS and the SM occur, one can opt to try and reduce
the transmit power of the SM to reduce power consumption.
• Fall algorithms: There is an option in the accelerometer to request acceleration
data around a certain interrupt. In this case a fall detection. Using this data,
it can be decided whether or not the fall was legitimate. The question whether
these algorithms should be performed on the sensor module, on the BS or on the
PC, will depend on how long the processing takes and how much data is needed
to determine a fall. If a lot of data is needed, the sending of it will be very power
consuming so then it would be best to do the processing in the sensor module.
If not, the data can be easily send to the PC/BS. If a long processing time is
needed, the sensor module will be online for a longer period which again increases
power consumption.
• Faster UART: Now, the maximum baud rate at which communication is possible
is 9600 Baud. This is limited by the Launchpad on which the BS is connected.
If a custom made UART/USB interface is made this rate can be increased to
the maximum baud rate of the computer/Matlab. This cannot be higher than 2
MBaud, which is the limit of the microcontroller. This 2MBaud is only possible
if the clock frequency of microcontroller is increased.
• BS settings: For now, the BS has very similar settings as the sensor module
(some exceptions exist). The BS can be optimised for better performance e.g.
the clock frequency can be set to a higher value because a steady supply voltage
is available, the SPI clock frequency can be changed. This can also be done in
the sensor module.
• Sensor settings: The settings of the fall detection of the accelerometer are set
to generate an interrupt quite quickly (cf. section 5.4.2). This is convenient for

5.9 Improvements 87
easy debugging. For a real life scenario, these settings have to be altered and
optimised.
• Include sensorID: If a sensor module has sent its data, it will listen to any response
the BS sends back. If multiple sensor modules are present and listen at the same
time, they will both receive the same message and interpret it as the answer to
them. This can be avoided if the sensorID is included in the answer.
• Module: Texas Instruments also has another module which would be suitable for
our use which is the EZ430RF2500 [50]. This module is a premade, small, all in
one module which sends on a higher frequency (about 2.4 GHz). The prices are
equivalent but a higher frequency means less penetration through walls which
makes it less suitable for indoor use. A first advantage of this module is that,
in a later state, the system might be integrated into the network card of the
computer and communicate using Wifi frequencies. Higher frequencies typically
have a higher data capacity so this would also benefit the communication. This
has to be examined further.
• Frequencies: It is possible to change the frequency of the sensor module quite
easily. The BS can command every sensor module to use another frequency to
cancel out interference. Another possibility is to use a different frequency for the
uplink and downlink. Now no interference can happen between BS and sensor
module. In any case multiple BSs are needed with each a different task/fre-
quency. This can also be implemented using one BS with multiple antenna chips.
SmartRFstudio suggests a channel spacing of about 0.2 MHz. This means that
in the 433 MHz ISM-band (bandwidth 1.74 MHz) eight channels can be used.
• Duplex UART: For now the PC works as a monitoring station. If it is desired
that the PC should be a control centre the UART communication should be
duplex. If it is possible to send data to the BS, the BS can alter the settings of
the different sensor modules by sending them a different answer.
• Receive interrupt: Both the BS and the sensor module do not use a receive
interrupt. The microcontroller of the BS repeatedly polls the antenna chip if
data was received. The sensor module just waits for 10 ms, and then checks if
data was received. If an interrupt from the antenna chip is used, some time can
be spared.
• Free-fall: If a free-fall occurs, the sensor module will transmit this data. If no
answer is received, the sensor module goes to LPM and does not remember the

5.9 Improvements 88
free-fall event. This is easily solved by remembering this event and sending the
message multiple times until it is acknowledged. The timeouts between trans-
missions should be temporally decreased to get a warning to the BS as soon as
possible.
• Communication algorithm: A more sophisticated protocol would solve the com-
munication conflicts. There are standard protocols available for wireless networks
but most of them do not account for low power applications. It is out of the ques-
tion to keep the sensor modules listening for an extended period of time. A more
realistic approach is given below.
The protocol consists of a sort of time division multiplexing. An example of the
timeline of the protocol is displayed in figure 5.18. The BS determines the time
schedule when the sensor nodes are allowed to send. To insure communication
is over when every interval ends, some margin is added. In each communication
burst to a specific sensor node, the schedule can be made clear to this node.
Internally the sensor module knows in what interval it is allowed to send using
its own timer. The sensor module does not have to send something in every, for
him scheduled, interval. Due to the time division, the (scheduled) sensor modules
cannot interfere.
Sending on interrupt (button or fall) will be handled during the ‘free’ intervals
which is also divided into multiple slots (not shown in figure 5.18). ‘Free’ means
that it are intervals in which every sensor module is allowed to send. In these
intervals interference can occur and when it does, the sensor modules will not
get a valid answer. They will resend their message again in the next ‘free’ in-
terval (maybe this time in another randomly chosen slot) or in the for them
scheduled interval (whichever is earliest). On a scheduled interval, interference is
nonexistent so then the message will definitely be received and answered (if the
BS is in range).
There is however a problem with new sensor modules that will try to connect
with the BS. If it is possible (enough power is available) the sensor will listen for
an extended period of time to intercept any messages, figure out the schedule of
the BS and locate the ‘free’ intervals. In those intervals the new sensor module
can communicate with the BS an can so be included into the schedule. If not

5.9 Improvements 89
enough power is available to initially listen for an extended period of time, the
sensor module will transmit at periodic time intervals. Whenever this sending
happens in a ‘free’ interval, the BS can reply and include the sensor module
into the schedule. Remark that when a new sensor sends data during scheduled
intervals of another sensor module, the messages will interfere. This has to be
detected by the corresponding scheduled sensor module and it will send its data
again in a later interval. Note that the interval at which the new sensor module
initially sends has to be chosen correctly to avoid interfering with the same sensor
module over and over again.
If a sensor module does not receive a valid answer after several transmissions (es-
pecially during its own scheduled interval),the sensor module can opt to increase
its transmit power. This failed transmission can be caused by an interfering sen-
sor module or being out of the receiving range of the BS. The last problem can
be solved by increasing the transmit power of the sensor module. The problem
of interference should solve itself in time (due to choosing random slots in the
‘free’ intervals) if the sensor network is not too crowded.
Sensor 1S & R
SEND & RECEIVE = S & RMARGIN = M
Sensor 2S & R
Sensor NS & RM M M
Sensor 3S & R 'FREE' Interval Sensor N+1
S & R
Sensor MS & R
Sensor 1S & RM M
Sensor 2S & R M
M
Time
'FREE' Interval
Figure 5.18: Protocol timeline

TOTAL SYSTEM 90
Chapter 6
Total system
6.1 Introduction
In this chapter the developments and research presented in the previous chapters are
combined to create one sensor module on a PCB. Some of the problems which occured,
will be discussed as well as some of the design choices.
6.2 Boards
Three new boards are created (cf. figures in section A.1 of the appendix) . The main
board (sensor module board) contains four thin-film batteries, the boost capacitors and
the digital part (microcontroller, accelerometer and antenna chip). The other boards
each contain a system to harvest energy from a different source (thermal and solar). To
these boards, the harvesting elements can be connected (Peltier element, solar module).
The boards themselves contain a regulator and supercapacitors. The step-up converter
is also present in both boards, but on the thermal board, this converter is included in
the regulator chip. The thermal and solar board can be easily plugged in below the
sensor module board (cf. 6.1 and 6.2) This reduced the size of the total sensor module.
Some extra measurement pins (two analog and two digital pins) are transferred from
the EH boards to the SM board. For now, the microcontroller does not read those
values. A reset button is added which resets the microcontroller.
The antenna chip is set in a corner, with the antenna facing away from the rest of the
circuit. Therefore the amount of disturbance of the radiation pattern of the antenna,
due to the surrounding circuit, is limited.

6.3 Performance and measurements 91
Figure 6.1: Complete sensor module(top view)
Figure 6.2: Complete sensor module(side view)
Solar cell Regulator
Super-Capacitor
Step-up converter
Thin-film batteries
Boost-Capacitor
Microcontroller
Peltier element Regulator
Super-Capacitor
Sensor
Antenna chip
Thermal board
Solar board
Sensor module board
Figure 6.3: Schematic overview of the sensor module and its supply modules
6.3 Performance and measurements
If the energy harvesting elements are connected, the system charges correctly. If no
solar or thermal energy is available, the thin-film batteries are charged using the remai-
ning energy on the supercapacitors. Meanwhile the microcontroller stays operational
at all times.
When the sensor module falls, multiple interrupts are sent to the microcontroller (due
to the low fall threshold). The microcontroller will send multiple times in less than
a second. Due to the dimensioning of the boost capacitors, this will not cause the
voltage to drop below the minimum supply voltage of the digital part of the system.
If the supply voltage drops below 2.5 V, there will be consequences concerning the
measurements of the ADC which needs an internal 2.5 V reference voltage.

6.3 Performance and measurements 92
To check how long the system lasts, and determine the transmit timeout of the micro-
controller, the microcontroller is set to LPM. Only the solar board was connected to
the SM board. At the start the supercapacitors are charged to 3.5 V (not maximal)
and the thin-film batteries to 4.07 V (maximal). This state is achieved when the sen-
sor module can charge for 45 min in full sunlight. Now the solar cell is disconnected
and the system starts to discharge slowly. After more than a day, the supercapaci-
tors do not contain any useful charge (about 0.5 V). The thin-film batteries are still
fully charged. Now the thin-film batteries power the digital part of the system. After
another day the thin-film batteries cannot supply the system any more. So, if no EH
is available and the storage is full, the system can stay operational (an interrupt will
still trigger a transmission) for one extra day if the system is in LPM. This result is
very convenient for our application. If no EH is available and the system does not have
to send frequently (e.g. at night) the system can go to LPM and last for at least 2 days .
When the supercapacitors are charged to 3.5 V and the thin-film batteries are full,
the system can last for 12 hours if the sensor module transmits every 6 seconds. This
is long enough to last during the night, but the supercapacitors will be totally depleted.
Despite of the placing of the antenna chip, the wireless range of the antenna is decrea-
sed. Next to interference of the radiation pattern, this can also be caused by a different
substrate (FR4) compared to the AIR Module Boosterpack [43].
A small network with 2 sensors is set up, and the visualisation is shown in figure 6.4.
Every sensor has its own colour on the graph. If a button is pressed on a sensor module
a circle will appear in the corresponding colour. The same happens when a fall occurs
(star). The last received data is available in the section ’Current data’.

6.3 Performance and measurements 93
Figure 6.4: Visualisation in Matlab of 2 sensor modules in a network

CONCLUSION 94
Chapter 7
Conclusion
This thesis was successful in achieving the goal of the assignment. A wireless transcei-
ver for personal communication powered by energy harvesting has been created.
In the previous chapter, it was proven that the system operates correctly. The system
uses solar and thermal energy to power the digital part of the system and to charge
the available storage components. The choice of the energy harvesting source used, is
based on the available and harvested power for the different types of energy. Never-
theless, other sources can also be used to power a sensor module but this module will
have less possibilities and a longer timeout period between transmissions.
There are still some small bugs need fixing. Improvements can still be made, as dis-
cussed in sections 3.1.3, 4.3.2 and 5.9.
To be usable in the suggested application of chapter 2, changes to the system have to
be made. The system has to be miniaturised (possibly using multiple layer PCBs), an
appealing package should be designed, which also integrates the EH elements. Special
measures have to be made to ensure a failure-prove system.

FIGURES AND LAYOUT PCBS 95
Appendix A
Figures and Layout PCBs
A.1 Boards of the complete sensor module
A.1.1 Solar board
Figure A.1: Solar energy harvesting board, PCB layout top layer
Figure A.2: Solar energy harvesting board, PCB layout bottom layer

A.1 Boards of the complete sensor module 96
Figure A.3: Solar energy harvesting board
A.1.2 Thermal board
Figure A.4: Thermal energy harvesting board, PCB layout top layer
Figure A.5: Thermal energy harvesting board, PCB layout bottom layer

A.1 Boards of the complete sensor module 97
Figure A.6: Thermal energy harvesting board
A.1.3 Sensor module board
Figure A.7: Sensor module board, PCB layout top layer

A.2 Test boards 98
Figure A.8: Sensor module board, PCB layout bottom layer
Figure A.9: Sensor module board
A.2 Test boards

A.2 Test boards 99
Figure A.10: Test board for solar energy harvesting (LTC3105)
Figure A.11: Test board for thermal energy harvesting (LTC3109)

A.2 Test boards 100
Figure A.12: Test board for vibrational energy harvesting (LTC3588-1)
Figure A.13: Test board for the thin-film batteries (CPC3150)

A.2 Test boards 101
Figure A.14: Active diode (LTC4413)

BIBLIOGRAPHY 102
Bibliography
[1] IXYS. CPC1824 4V Output Solar Cell datasheet. http://www.ixysic.com/
home/pdfs.nsf/www/CPC1824.pdf/$file/CPC1824.pdf, May 2013.
[2] IXYS. IXOLAR High Efficiency SolarMD datasheet. http://ixapps.ixys.com/
DataSheet/20110107-SLMD121H10-DATA-SHEET.pdf, May 2013.
[3] Linear Technology. LTC3105, 400ma step-up dc/dc converter with maximum
power point control and 250mv start-up datasheet. http://cds.linear.com/
docs/en/datasheet/3105fa.pdf, May 2013.
[4] Mark Grazier Marugavel Raju. Texas Instruments, White Paper Energy Harves-
ting. http://www.ti.com/lit/wp/slyy018a/slyy018a.pdf, October 2012.
[5] Faruk Yildiz. Potential Ambient Energy Harvesting Sources and Techniques.
http://scholar.lib.vt.edu/ejournals/JOTS/v35/v35n1/pdf/yildiz.pdf,
October 2012.
[6] Wikipedia. Thermoelectric effect. http://en.wikipedia.org/wiki/
Thermoelectric_effect, October 2012.
[7] Laird Technologies. PolarTEC Series Thermoelectric Modules datasheet. http:
//www.lairdtech.com/WorkArea/DownloadAsset.aspx?id=4297, May 2013.
[8] Linear Technology. LTC3109, auto-polarity, ultralow voltage step-up converter
and power manager datasheet. http://cds.linear.com/docs/en/datasheet/
3109fa.pdf, May 2013.
[9] Linear Technology. LTC3108, ultralow voltage step-up converter and power mana-
ger datasheet. http://cds.linear.com/docs/en/datasheet/3108fb.pdf, May
2013.
[10] V22BL. http://www.mide.com/pdfs/Volture_Datasheet_001.pdf, December
2012.

BIBLIOGRAPHY 103
[11] LTC3588. http://cds.linear.com/docs/en/datasheet/35881fa.pdf, Decem-
ber 2012.
[12] Rogers Corporation Instruments. RO3010. http://www.rogerscorp.com/
documents/722/acm/RO3000-Laminate-Data-Sheet-RO3003-RO3006-RO3010.
aspx, November 2012.
[13] Universal radio inc. RSH789. http://www.universal-radio.com/catalog/
hamantht/1204.html, October 2012.
[14] Vishwanath Iyer. Broadband Impedance Matching of Antenna Radia-
tors. http://www.wpi.edu/Pubs/ETD/Available/etd-092910-012955/
unrestricted/viyer.pdf, August 2010.
[15] Prof. H. Rogier. Antennas and Propagation. 2012-2013.
[16] Michael Y. W. Chia Zhi Ning Chen. Broadband Planar Antennas. John Wiley
and Sons, Ltd, 2006.
[17] Agilent Technologies. Analog Design System. http://www.home.agilent.
com/en/pc-1297113/advanced-design-system-ads?&cc=BE&lc=dut, February
2012.
[18] Karim A. Hamad. Design and Enhancement Bandwidth Rectangular Patch An-
tenna Using Single Trapezoidal Slot Technique. http://www.arpnjournals.com/
jeas/research_papers/rp_2012/jeas_0312_654.pdf, March 2012.
[19] Prof. D. De Zutter. Applied Electromagnetism. 2005-2006.
[20] IDTechEx Dr. Peter Harrop, Dr. Harry Zervos. Batteries, Supercapacitors, Al-
ternative Storage for Portable Devices. http://media.idtechex.com/pdfs/en/
I3713L9576.pdf, 2009-2019.
[21] Dr. K. Burak Ucer. Nanotechnology in Thin Film Batteries. http://users.wfu.
edu/ucerkb/Nan242/L17-Batteries.pdf, May 2013.
[22] Donald E. Stephens. Using a Small Solar Cell for Harvesting and a
Supercapacitor for Power Management in a Wireless Sensor. http:
//www.cap-xx.com/resources/docs/CAP-XX%20-%20Using%20%20a%20small%
20solar%20cell%20for%20%20harvesting%20and%20a%20supercapacitor%
20for%20power%20management.pdf, June 2010.

BIBLIOGRAPHY 104
[23] Wikipedia. Electric double-layer capacitor. https://en.wikipedia.org/wiki/
Electric_double-layer_capacitor, .
[24] Wikipedia. Supercapacitor. http://en.wikipedia.org/wiki/Supercapacitor,
.
[25] Wikipedia. Thin film rechargeable lithium battery. http://en.wikipedia.org/
wiki/Thin_film_rechargeable_lithium_battery, .
[26] Cymbet. Design Advantages of Solid State Batteries versus Supercapacitors.
http://www.cymbet.com/pdfs/WP-EnerChips-vs-Supercaps.pdf, May 2012.
[27] SEMI Emerging Markets Paula Doe. Next-Generation Energy Storage: Batteries
and Supercapacitors Look to Micromanufacturing Solutions to Improve Perfor-
mance. http://www.semi.org/en/node/43701, November 2012.
[28] Wikipedia. Ragone chart. http://en.wikipedia.org/wiki/Ragone_chart, May
2012.
[29] Cymbet. EnerChip CC CBC3150 datasheet. http://www.cymbet.com/pdfs/
DS-72-03.pdf, May 2013.
[30] Cymbet. EnerChip User Guide. http://www.cymbet.com/pdfs/
Cymbet-User-Guide.pdf, May 2013.
[31] Cymbet. EnerChip CC CBC050 datasheet. http://www.cymbet.com/pdfs/
DS-72-01.pdf, May 2013.
[32] Cornell Dubilier. Type EDL , Electric Double Layer Supercapacitors datasheet.
http://www.mouser.com/ds/2/88/EDL-19670.pdf, May 2013.
[33] Texas Instruments. Low Input Voltage Step-up Converter datasheet. http://
www.ti.com/lit/ds/symlink/tps61221.pdf, May 2013.
[34] Cymbet. Using the EnerChip in Pulse Current Applications. http://www.cymbet.
com/pdfs/AN-1025.pdf, May 2013.
[35] ARM. Cortex-M0+ Processor. http://www.arm.com/products/processors/
cortex-m/cortex-m0plus.php, november 2012.
[36] Texas Instruments. Code Composer Studio. http://www.ti.com/tool/
ccstudio, January 2013.

BIBLIOGRAPHY 105
[37] Texas Instruments. MSP430G2553. http://www.ti.com/lit/ds/symlink/
msp430g2553.pdf, January 2013.
[38] Texas Instruments. Launchpad Development Tool MSP-EXP430G2. http://
www.ti.com/tool/msp-exp430g2, January 2013.
[39] IAR Systems. IAR VisualSTATE. http://www.iar.com/en/Products/
IAR-visualSTATE/, January 2013.
[40] Texas Instruments. SimpliciTI. http://www.ti.com/tool/simpliciti, January
2013.
[41] Electronic Communications Committee (ECC) within the European Conference of
Postal and Telecommunications Administrations (CEPT). European Table of Fre-
quency Allocations and Applications. http://www.erodocdb.dk/docs/doc98/
official/pdf/ERCRep025.pdf, March 2013.
[42] Texas Instruments. CC110L. http://www.ti.com/lit/ds/swrs109a/swrs109a.
pdf, January 2013.
[43] Texas Instruments. CC110L AIR Module BoosterPack. http://www.ti.com/
tool/430boost-cc110l, January 2013.
[44] MathWorks. Matlab. http://www.mathworks.com/products/matlab/, March
2013.
[45] Wikipedia. Serial Peripheral Interface. http://nl.wikipedia.org/wiki/
Serial_Peripheral_Interface, January 2013.
[46] Texas Instruments. SmartRF Studio. http://www.ti.com/tool/
smartrftm-studio, February 2013.
[47] Beagle-Ears. FCC Rules for ISM Band Wireless Equipment. http://www.
beagle-ears.com/lars/engineer/wireless/fccrules.htm, March 2013.
[48] Texas Instruments. A110LR09A. http://www.anaren.com/sites/default/
files/user-manuals/A110LR09x_Users_Manual.pdf, March 2013.
[49] Texas Instruments. Graphical Peripheral Configuration Tool. http://www.ti.
com/tool/grace, February 2013.
[50] Texas Instruments. EZ430RF2500. http://www.ti.com/lit/ug/slau227e/
slau227e.pdf, January 2013.