CINEMATIQUE - s21182c7956f6fcf0.jimcontent.com · Lycée Vauvenargues PTSI Cinématique page 3 / 30...
30
Lycée Vauvenargues PTSI Cinématique page 1 / 30 CINEMATIQUE But : Le but de la cinématique est de modéliser les mouvements des pièces d’un système mécanique, sans s’intéresser aux causes qui les produisent. On cherchera les relations entre ces mouvements, en vue de vérifier les performances d’un système et/ou choisir des caractéristiques des actionneurs. Ch 1. : POSITION D’UN SOLIDE. ETUDE GEOMETRIQUE D’UN SYSTEME Objectifs : - définir la position à un instant donné entre des ensembles mobiles - définir des mouvements simples - réaliser la modélisation géométrique d’un système, - déterminer la loi entrée/sortie d’un système à partir de son paramétrage. - déterminer la trajectoire d’un point / repère Introduction : Le mouvement d’un solide peut être caractérisé par le déplacement (ou variation de position) de ce solide au cours du temps. Il est donc nécessaire de définir : ce qu’on appelle un solide des repères liés à chaque solide afin de quantifier les variations de position une base de temps pour observer les variations de position de ces repères entre eux. 1. Définition d’un solide Un solide est un ensemble de points matériels de masse constante, indéformable. C’est grâce à cette indéformabilité qu’on pourra établir une relation entre les vitesses de 2 points différents d’un même solide. 2. Repère lié à un solide A chaque solide va être lié un repère : Le déplacement d’un solide par rapport à un autre solide sera modélisé par le déplacement d’un repère par rapport à un autre repère. Les repères seront toujours choisis orthonormés directs R cabine R echelle sup R echelle inf R camion R embase = solide ≠ solide Un ensemble de pièces en liaison encastrement sera considéré comme un seul et même solide (que l’on nommera ensemble cinématique).
Transcript of CINEMATIQUE - s21182c7956f6fcf0.jimcontent.com · Lycée Vauvenargues PTSI Cinématique page 3 / 30...
Lycée Vauvenargues PTSI Cinématique page 1 / 30
CINEMATIQUE
But :
Le but de la cinématique est de modéliser les mouvements des pièces d’un système mécanique, sans s’intéresser aux
causes qui les produisent. On cherchera les relations entre ces mouvements, en vue de vérifier les performances d’un
système et/ou choisir des caractéristiques des actionneurs.
Ch 1. : POSITION D’UN SOLIDE. ETUDE GEOMETRIQUE D’UN
SYSTEME
Objectifs :
- définir la position à un instant donné entre des ensembles mobiles
- définir des mouvements simples
- réaliser la modélisation géométrique d’un système,
- déterminer la loi entrée/sortie d’un système à partir de son paramétrage.
- déterminer la trajectoire d’un point / repère
Introduction :
Le mouvement d’un solide peut être caractérisé par le déplacement (ou variation de position) de ce solide au
cours du temps. Il est donc nécessaire de définir :
ce qu’on appelle un solide
des repères liés à chaque solide afin de quantifier les variations de position
une base de temps pour observer les variations de position de ces repères entre eux.
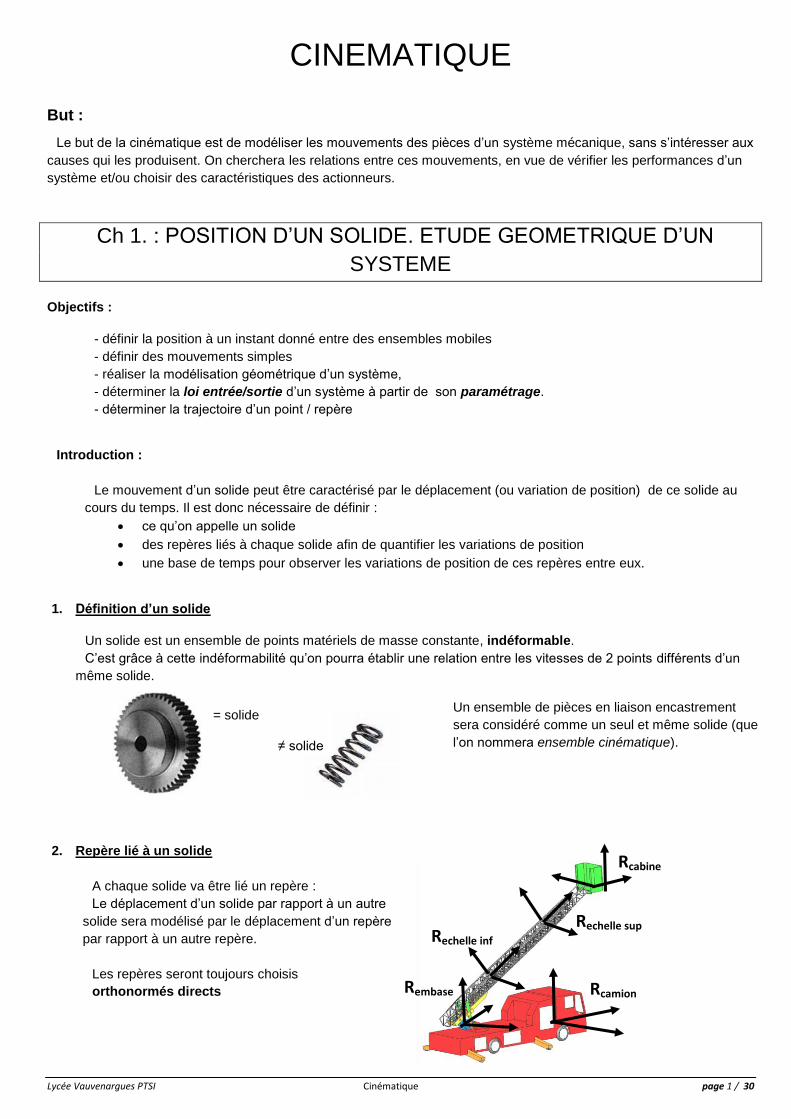
1. Définition d’un solide
Un solide est un ensemble de points matériels de masse constante, indéformable.
C’est grâce à cette indéformabilité qu’on pourra établir une relation entre les vitesses de 2 points différents d’un
même solide.
2. Repère lié à un solide
A chaque solide va être lié un repère :
Le déplacement d’un solide par rapport à un autre
solide sera modélisé par le déplacement d’un repère
par rapport à un autre repère.
Les repères seront toujours choisis orthonormés directs
Rcabine
Rechelle sup Rechelle inf
Rcamion Rembase
= solide
≠ solide
Un ensemble de pièces en liaison encastrement
sera considéré comme un seul et même solide (que
l’on nommera ensemble cinématique).
Lycée Vauvenargues PTSI Cinématique page 2 / 30
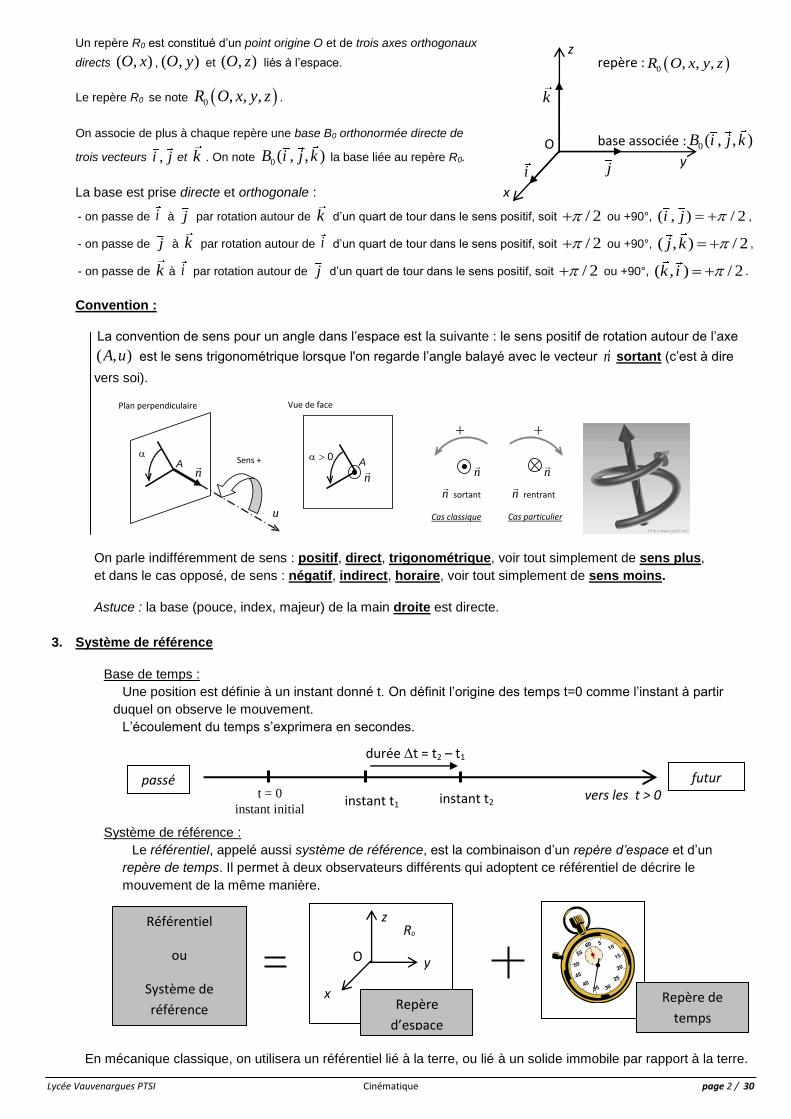
Un repère R0 est constitué d’un point origine O et de trois axes orthogonaux
directs ( , )O x , ( , )O y et ( , )O z liés à l’espace.
Le repère R0 se note 0 , , ,R O x y z .
On associe de plus à chaque repère une base B0 orthonormée directe de
trois vecteurs ,i j et k . On note 0 ( , , )B i j k la base liée au repère R0.
La base est prise directe et orthogonale :
- on passe de i à j par rotation autour de k d’un quart de tour dans le sens positif, soit / 2 ou +90°, ( , ) / 2i j ,
- on passe de j à k par rotation autour de i d’un quart de tour dans le sens positif, soit / 2 ou +90°, ( , ) / 2j k ,
- on passe de k à i par rotation autour de j d’un quart de tour dans le sens positif, soit / 2 ou +90°, ( , ) / 2k i .
Convention :
La convention de sens pour un angle dans l’espace est la suivante : le sens positif de rotation autour de l’axe
( , )A u est le sens trigonométrique lorsque l'on regarde l’angle balayé avec le vecteur n sortant (c’est à dire
vers soi).
u
Plan perpendiculaire
A
nr
0ASens +
nr
nr
Vue de face
nr
sortant nr
rentrant
Cas classique Cas particulier
nr
On parle indifféremment de sens : positif, direct, trigonométrique, voir tout simplement de sens plus,
et dans le cas opposé, de sens : négatif, indirect, horaire, voir tout simplement de sens moins.
Astuce : la base (pouce, index, majeur) de la main droite est directe.
3. Système de référence
Base de temps :
Une position est définie à un instant donné t. On définit l’origine des temps t=0 comme l’instant à partir
duquel on observe le mouvement.
L’écoulement du temps s’exprimera en secondes.
Système de référence :
Le référentiel, appelé aussi système de référence, est la combinaison d’un repère d’espace et d’un
repère de temps. Il permet à deux observateurs différents qui adoptent ce référentiel de décrire le
mouvement de la même manière.
En mécanique classique, on utilisera un référentiel lié à la terre, ou lié à un solide immobile par rapport à la terre.
futur passé t = 0
instant initial instant t1
durée t = t2 – t1
instant t2 vers les t > 0
y
z
x
R0
O
Référentiel
ou
Système de
référence Repère de
temps Repère
d’espace
y
z
x
repère : 0 , , ,R O x y z
base associée : 0 ( , , )B i j k O
i j
k
Lycée Vauvenargues PTSI Cinématique page 3 / 30
O
O1 1y
1x
1z
O
O1 1y
1x
1z
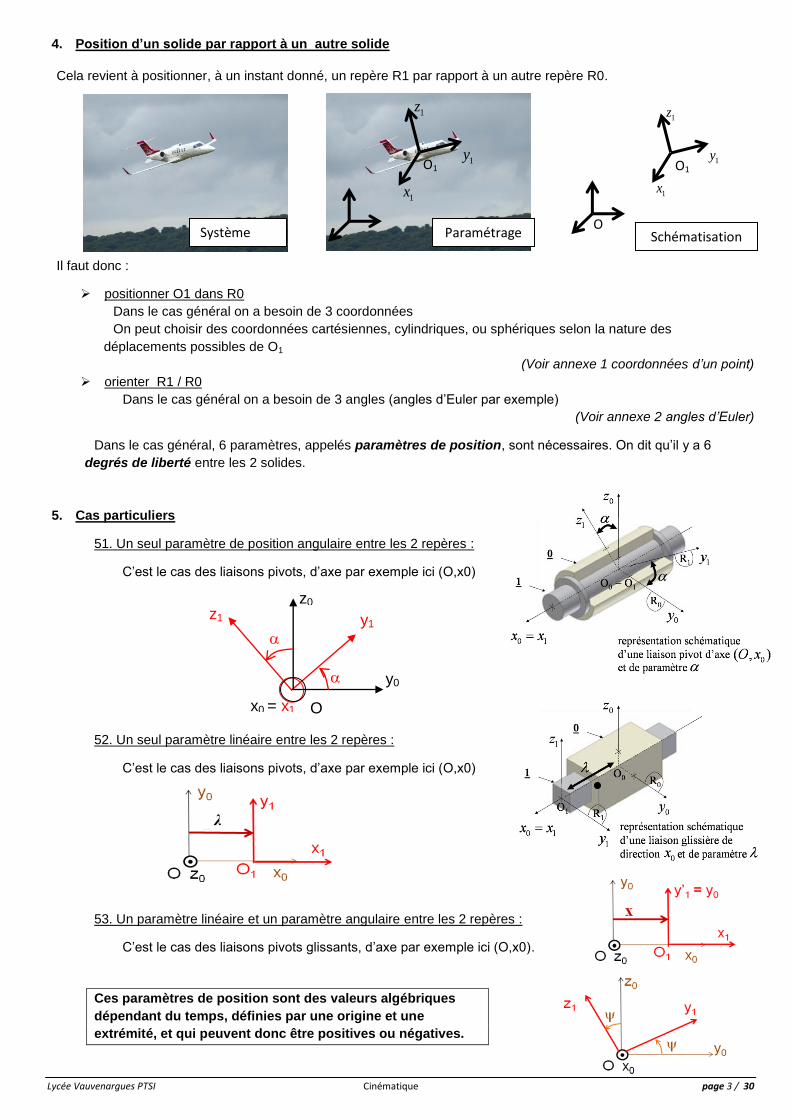
4. Position d’un solide par rapport à un autre solide
Cela revient à positionner, à un instant donné, un repère R1 par rapport à un autre repère R0.
Il faut donc :
positionner O1 dans R0
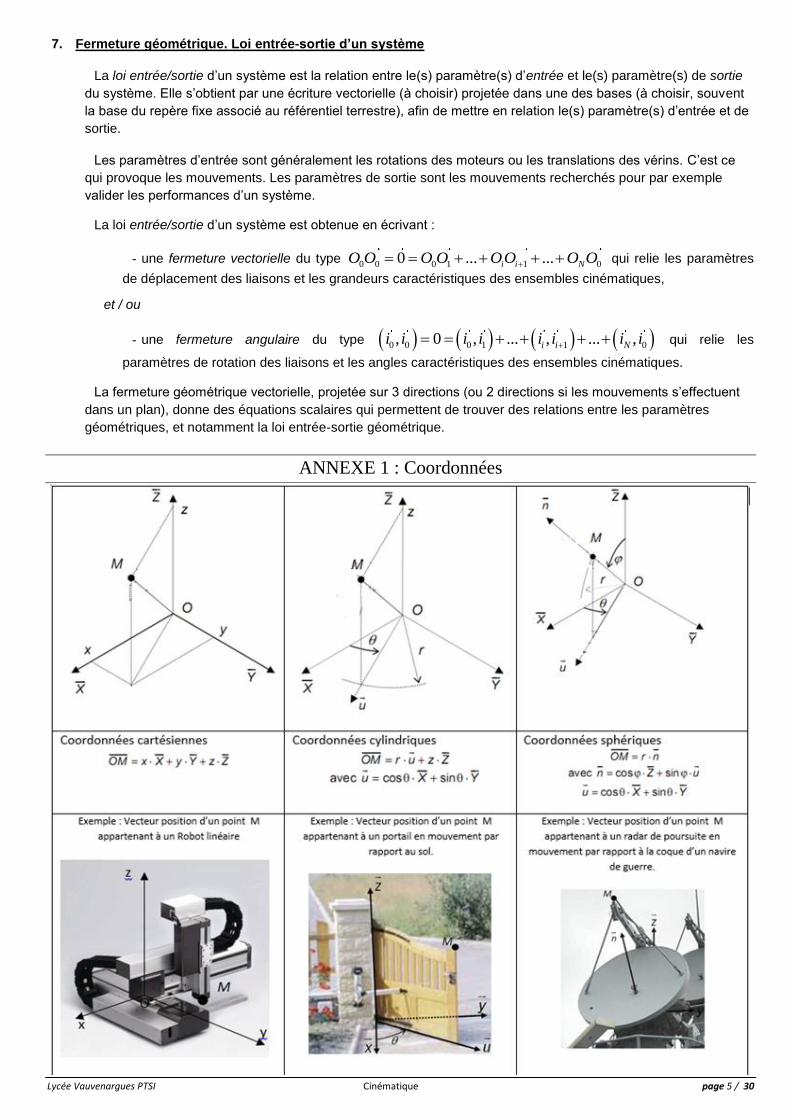
Dans le cas général on a besoin de 3 coordonnées
On peut choisir des coordonnées cartésiennes, cylindriques, ou sphériques selon la nature des
déplacements possibles de O1
(Voir annexe 1 coordonnées d’un point)
orienter R1 / R0
Dans le cas général on a besoin de 3 angles (angles d’Euler par exemple)
(Voir annexe 2 angles d’Euler)
Dans le cas général, 6 paramètres, appelés paramètres de position, sont nécessaires. On dit qu’il y a 6
degrés de liberté entre les 2 solides.
5. Cas particuliers
51. Un seul paramètre de position angulaire entre les 2 repères :
C’est le cas des liaisons pivots, d’axe par exemple ici (O,x0)
52. Un seul paramètre linéaire entre les 2 repères :
C’est le cas des liaisons pivots, d’axe par exemple ici (O,x0)
53. Un paramètre linéaire et un paramètre angulaire entre les 2 repères :
C’est le cas des liaisons pivots glissants, d’axe par exemple ici (O,x0).
Ces paramètres de position sont des valeurs algébriques
dépendant du temps, définies par une origine et une
extrémité, et qui peuvent donc être positives ou négatives.
y0
O
y1 z1
x0 = x1
z0
λ
Système
réel
Paramétrage Schématisation
Lycée Vauvenargues PTSI Cinématique page 4 / 30
6. Modélisation cinématique d’un système mécanique. Paramétrage.
Le paramétrage d’un système consiste à associer à chaque solide ou ensemble cinématique un repère et de
situer ces repères les uns par rapport aux autres selon la nature des liaisons en introduisant les paramètres de
liaison associés de type translation(s) ou rotation(s).
On commence par repérer ces différents solides, puis on identifie les mouvements possibles entre 2 solides
en liaisons (reliés entre eux par des surfaces de contact).
On donne une représentation schématique des solides sous forme de traits, reliant les symboles des liaisons
définies précédemment. Il faut respecter la position des points caractéristiques des liaisons, et les directions
caractéristiques de ces liaisons.
Souvent ce paramétrage est réalisé sur le schéma cinématique du système lorsqu’il le permet. Il est ensuite
généralement complété des figures planes permettant de définir tous les axes et points caractéristiques du
mécanisme.
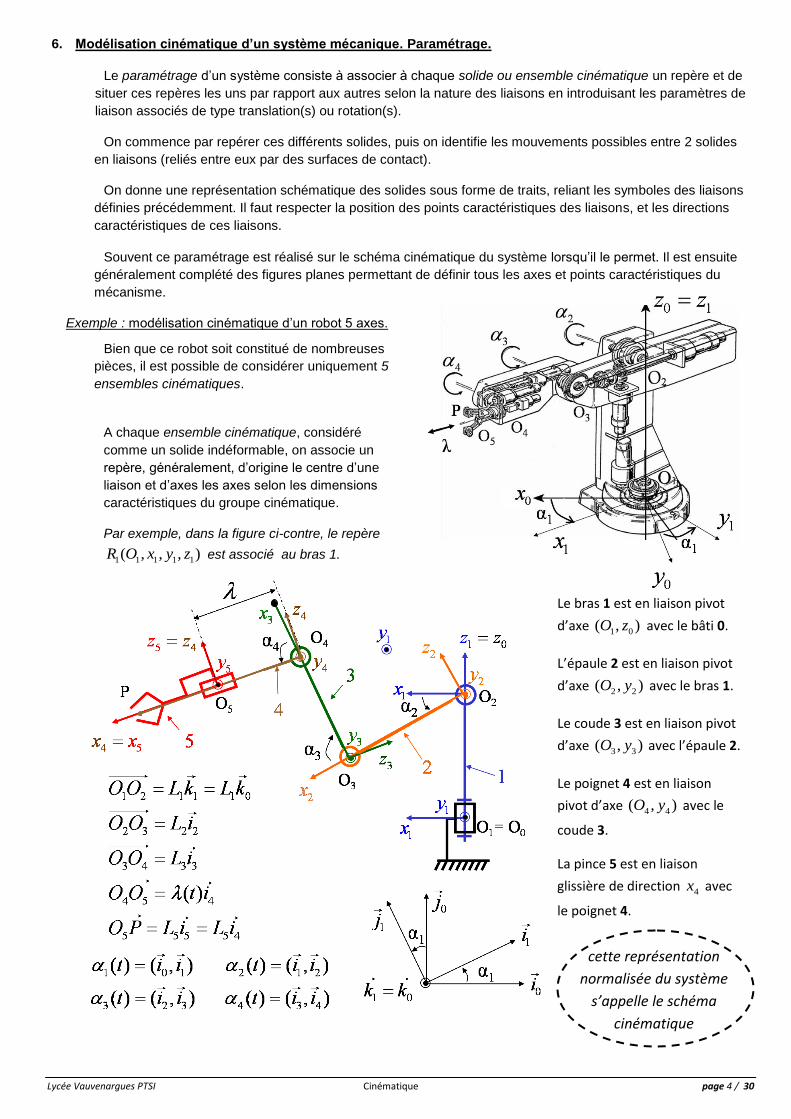
Exemple : modélisation cinématique d’un robot 5 axes.
Bien que ce robot soit constitué de nombreuses
pièces, il est possible de considérer uniquement 5
ensembles cinématiques.
Le bras 1 est en liaison pivot
d’axe 1 0( , )O z avec le bâti 0.
L’épaule 2 est en liaison pivot
d’axe 2 2( , )O y avec le bras 1.
Le coude 3 est en liaison pivot
d’axe 3 3( , )O y avec l’épaule 2.
Le poignet 4 est en liaison
pivot d’axe 4 4( , )O y avec le
coude 3.
La pince 5 est en liaison
glissière de direction 4x avec
le poignet 4.
cette représentation
normalisée du système
s’appelle le schéma
cinématique
A chaque ensemble cinématique, considéré
comme un solide indéformable, on associe un
repère, généralement, d’origine le centre d’une
liaison et d’axes les axes selon les dimensions
caractéristiques du groupe cinématique.
Par exemple, dans la figure ci-contre, le repère
1 1 1 1 1( , , , )R O x y z est associé au bras 1.
Lycée Vauvenargues PTSI Cinématique page 5 / 30
7. Fermeture géométrique. Loi entrée-sortie d’un système
La loi entrée/sortie d’un système est la relation entre le(s) paramètre(s) d’entrée et le(s) paramètre(s) de sortie
du système. Elle s’obtient par une écriture vectorielle (à choisir) projetée dans une des bases (à choisir, souvent
la base du repère fixe associé au référentiel terrestre), afin de mettre en relation le(s) paramètre(s) d’entrée et de
sortie.
Les paramètres d’entrée sont généralement les rotations des moteurs ou les translations des vérins. C’est ce
qui provoque les mouvements. Les paramètres de sortie sont les mouvements recherchés pour par exemple
valider les performances d’un système.
La loi entrée/sortie d’un système est obtenue en écrivant :
- une fermeture vectorielle du type 0 0 0 1 1 00 ... ...i i NO O O O OO O O qui relie les paramètres
de déplacement des liaisons et les grandeurs caractéristiques des ensembles cinématiques,
et / ou
- une fermeture angulaire du type 0 0 0 1 1 0, 0 , ... , ... ,i i Ni i i i i i i i qui relie les
paramètres de rotation des liaisons et les angles caractéristiques des ensembles cinématiques.
La fermeture géométrique vectorielle, projetée sur 3 directions (ou 2 directions si les mouvements s’effectuent
dans un plan), donne des équations scalaires qui permettent de trouver des relations entre les paramètres
géométriques, et notamment la loi entrée-sortie géométrique.
ANNEXE 1 : Coordonnées
Lycée Vauvenargues PTSI Cinématique page 6 / 30
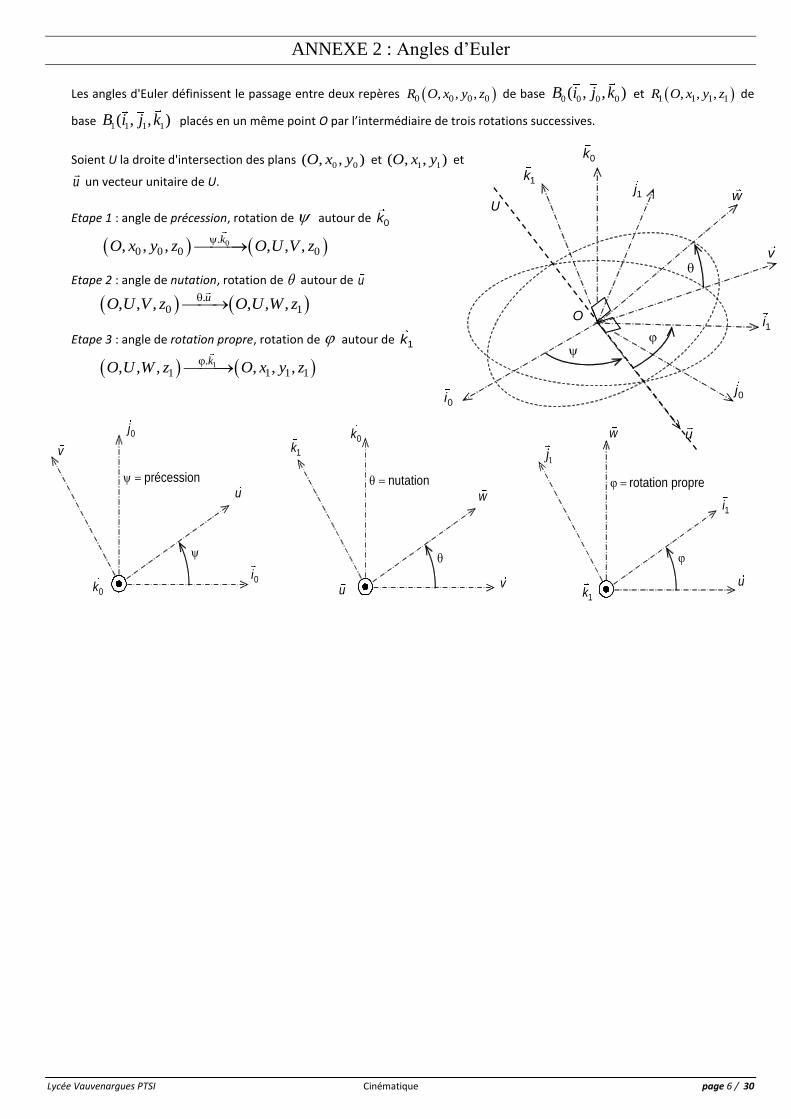
ANNEXE 2 : Angles d’Euler
Les angles d'Euler définissent le passage entre deux repères 0 0 0 0, , ,R O x y z de base 0 0 0 0( , , )B i j k et 1 1 1 1, , ,R O x y z de
base 1 1 1 1( , , )B i j k placés en un même point O par l’intermédiaire de trois rotations successives.
Soient U la droite d'intersection des plans 0 0( , , )O x y et
1 1( , , )O x y et
u
un vecteur unitaire de U.
Etape 1 : angle de précession, rotation de autour de 0k
0.0 0 0 0, , , , , ,
kO x y z O U V z
Etape 2 : angle de nutation, rotation de autour de u
.0 1, , , , , ,
uO U V z O U W z
Etape 3 : angle de rotation propre, rotation de autour de 1k
1.1 1 1 1, , , , , ,
kO U W z O x y z
0j
O
u
0k
v
w
1k
0i
1i
1j
rotation propre
1x
u
0z
précession
0y
0x
u
v
0z
nutation
uv
w
1z
1z
w
1y
U
0y
O
u
0z
v
w
1z
0x
1x
1y
rotation propre
1x
u
0k
précession
0j
0i
u
v
0z
nutation
uv
w
1z
1z
w
1y
0y
O
u
0z
v
w
1z
0x
1x
1y
rotation propre
1x
u
0z
précession
0y
0x
u
v
0k
nutation
uv
w
1k
1z
w
1y
0y
O
u
0z
v
w
1z
0x
1x
1y
rotation propre
1i
u
0z
précession
0y
0x
u
v
0z
nutation
uv
w
1z
1k
w
1j

Lycée Vauvenargues PTSI Cinématique page 7 / 30
Ch 2 : POSITION, VITESSE ET ACCELERATION
D’UN POINT D’UN SOLIDE
Objectifs :
- déterminer position, vitesse et accélération d’un point lié à un solide par rapport à un référentiel (ou repère), en utilisant la formule de dérivation vectorielle,
- définir le vecteur taux de rotation entre deux repères.
1 Position d’un point d’un solide par rapport à un repère. Trajectoire
On appelle position du point M appartenant au solide 1
dans son mouvement par rapport au repère R0 le vecteur :
( )OM t
Important :
L’origine O du vecteur position doit correspondre à
l’origine du repère R0 par rapport auquel on étudie le
mouvement.
Remarque :
Il n’est pas forcément nécessaire de donner les coordonnées de ce vecteur dans R0. Il est souvent
plus simple de l’exprimer vectoriellement dans un repère mobile.
Définition :
La trajectoire d’un point M dans son mouvement par rapport à un repère R est l’ensemble des
positions prises par ce point au cours du temps, dans le repère R.
Notation : T (M, S/R).
2 Vitesse d’un point d’un solide par rapport à un repère
On note 0( ,1/ )V M R le vecteur vitesse du point M
appartenant au solide 1 dans son mouvement par rapport au
repère R0.
Par définition, à chaque instant t, 0( ,1/ )V M R est la dérivée
par rapport au temps du vecteur position ( )OM t dans le repère
par rapport auquel on considère le mouvement,
0
0( ,1/ ) ( )R
dV M R OM t
dt
Dérivation d’un vecteur, voir formule de dérivation vectorielle
L’unité de la norme du vecteur vitesse est le m/s.
Propriété : le vecteur vitesse 0( ,1/ )V M R est à chaque instant tangent à la trajectoire T(M,1/R0).

Lycée Vauvenargues PTSI Cinématique page 8 / 30
3 Dérivation vectorielle et vecteur rotation
3.1 Dérivée d’un vecteur, exprimé dans B0, par rapport à R0 un repère fixe ou mobile
Soit le vecteur ( )u t , exprimé dans B0, tel que u (t) = a(t) 0i + b(t)
0j + c(t) 0k . La dérivée de ( )u t par
rapport à R0 est telle que :
0
0 0 0
( ) a b c
R
du t d d di j k
dt dt dt dt
= 0 0 0a b ci j k .
Dans ce cas, il suffit de dériver les composantes du vecteur par rapport au temps.
3.2 Dérivée d’un vecteur, exprimé dans B1 base d’un repère mobile, par rapport à R0 un repère fixe ou mobile
Soit le vecteur ( )u t exprimé dans B1, tel que u (t) = a(t) 1i + b(t)
1j + c(t) 1k .
La dérivée de ( )u t par rapport à R0 peut s’exprimer en fonction de la dérivée de ( )u t par
rapport à un autre repère R1 :
0 1
1 0
( ) ( )( / ) ( )
R R
du t du tR R u t
dt dt
où :
- 1 0( / )R R est le vecteur vitesse de rotation (ou vecteur rotation) de R1 par rapport à R0,
- 1 0( / ) ( )R R u t est le produit vectoriel : voir annexe 1.
Le vecteur vitesse de rotation 1 0( / )R R :
1 0( / )R R , appelé vecteur vitesse de rotation de R1 par rapport à R0, définit à l’instant t la vitesse de
rotation du repère R1 par rapport au repère R0. L’unité de la norme du vecteur vitesse de rotation est le
rad/s.
Exemple : Dans le cas de la figure ci-dessous, on passe du repère R1 au repère R0 par rotation autour de l’axe
0( , )O z d’un angle . On définit le vecteur rotation par :
formule de
dérivation
vectorielle
Ω R1 / R0 =

Lycée Vauvenargues PTSI Cinématique page 9 / 30
Cas général : On peut définir 3 angles d’Euler :
Alors :
Cas particulier : Translation de 2 repères
3.3 cas particuliers: dérivée d’un vecteur d’une base mobile par rapport à un repère R0 fixe
En cinématique, le vecteur position ou vecteur vitesse d’un point s’exprime souvent comme une somme de vecteurs qui ne sont pas les vecteurs directeurs du repère R0 par rapport auquel on étudie le mouvement. Il est donc très courant de devoir dériver un vecteur unitaire d’une base mobile par rapport à un repère R0 fixe.
Application : dérivée de x1 dans R0
3.4 Propriétés
- soient )(1 t et )(2 t deux fonctions scalaires et 1w et 2w deux vecteurs, alors :
0 00
1 1 2 2 1 1 2 21 1 2 2
( ). ( ). ( ) ( )( ). . ( ). .
R RR
d t w t w dw d t dw d tt w t w
dt dt dt dt dt
.
Ω R1 / R0 =
Ω R1 / R0 =
Lycée Vauvenargues PTSI Cinématique page 10 / 30
- dérivée du produit scalaire :
0 00
1 2 1 22 1
.. .
R RR
d w w dw dww w
dt dt dt
- dérivée du produit vectoriel :
0 00
1 2 1 22 1
R RR
d w w dw dww w
dt dt dt
Attention au sens
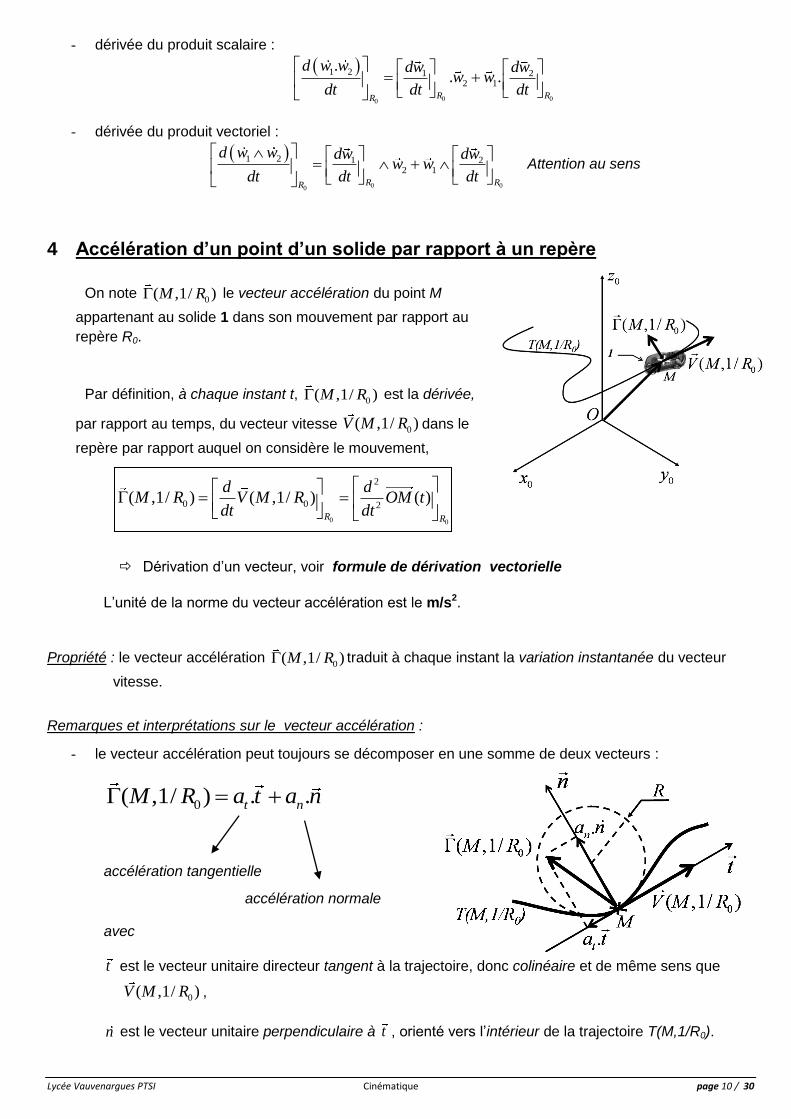
4 Accélération d’un point d’un solide par rapport à un repère
On note 0( ,1/ )M R le vecteur accélération du point M
appartenant au solide 1 dans son mouvement par rapport au
repère R0.
Par définition, à chaque instant t, 0( ,1/ )M R est la dérivée,
par rapport au temps, du vecteur vitesse 0( ,1/ )V M R dans le
repère par rapport auquel on considère le mouvement,
0 0
2
0 0 2( ,1/ ) ( ,1/ ) ( )
R R
d dM R V M R OM t
dt dt
Dérivation d’un vecteur, voir formule de dérivation vectorielle
L’unité de la norme du vecteur accélération est le m/s2.
Propriété : le vecteur accélération 0( ,1/ )M R traduit à chaque instant la variation instantanée du vecteur
vitesse.
Remarques et interprétations sur le vecteur accélération :
- le vecteur accélération peut toujours se décomposer en une somme de deux vecteurs :
0( ,1/ ) . .t nM R a t a n
accélération tangentielle
accélération normale
avec
t est le vecteur unitaire directeur tangent à la trajectoire, donc colinéaire et de même sens que
0( ,1/ )V M R ,
n est le vecteur unitaire perpendiculaire à t , orienté vers l’intérieur de la trajectoire T(M,1/R0).

Lycée Vauvenargues PTSI Cinématique page 11 / 30
- l’accélération tangentielle .ta t représente la variation de l’intensité du vecteur vitesse 0( ,1/ )V M R , si
0ta la vitesse du point M augmente, si 0ta sa vitesse diminue.
- l’accélération normale .na n (avec 0na ) représente la variation de l’orientation du vecteur vitesse
0( ,1/ )V M R .
- à chaque instant t, toute portion de la trajectoire autour du point M peut être assimilée à un cercle
dans le plan ( , , )M t n . Le rayon de ce cercle, noté R, est appelé le rayon local de giration.
En notant 0( ,1/ )V V M R , on montre que
t
dVa
dt et
2
n
Va
R
ANNEXE : Produit vectoriel w u v :
- le produit vectoriel est un opérateur antisymétrique : si w u v , alors w v u ,
- le vecteur w est par construction perpendiculaire à u et à v , il est un vecteur directeur de la normale
au plan ( , )u v ,
- la norme de w vérifie . . sin( , )w u v u v où l’angle ( , )u v compris entre 0, ,
- si u et v sont colinéaires alors 0w ,
- w est tel que l’on passe de u à v par rotation positive autour de w d’un angle inférieur à , voir
figure ci-dessous,
Plan ( , )u v
Sens +
w
Plan ( , )u v
Sens +
v
u
wu
v
- si
B
a
u b
c
et
B
d
v e
f
sont exprimés dans une même base ( , , )B i j k , les composantes de w dans
( , , )B i j k sont :
. .
. .
. .B B B
a d b f e c
w u b v e d c a f
c f a e d b
Pratique :
- dans une base orthonormée directe ( , , )B i j k on a i j k , j k i et k i j ,
- d’une manière générale, avec votre main droite : pouce index majeur
.
Lycée Vauvenargues PTSI Cinématique page 12 / 30
Ch 3 : CHAMP DES VECTEURS VITESSE. TORSEUR CINEMATIQUE
Objectifs :
• Etre capable de déterminer la vitesse en un point connaissant la vitesse en un autre point • Connaitre la distribution des vitesses pour des mouvements particuliers • Modéliser tout mouvement par un torseur.
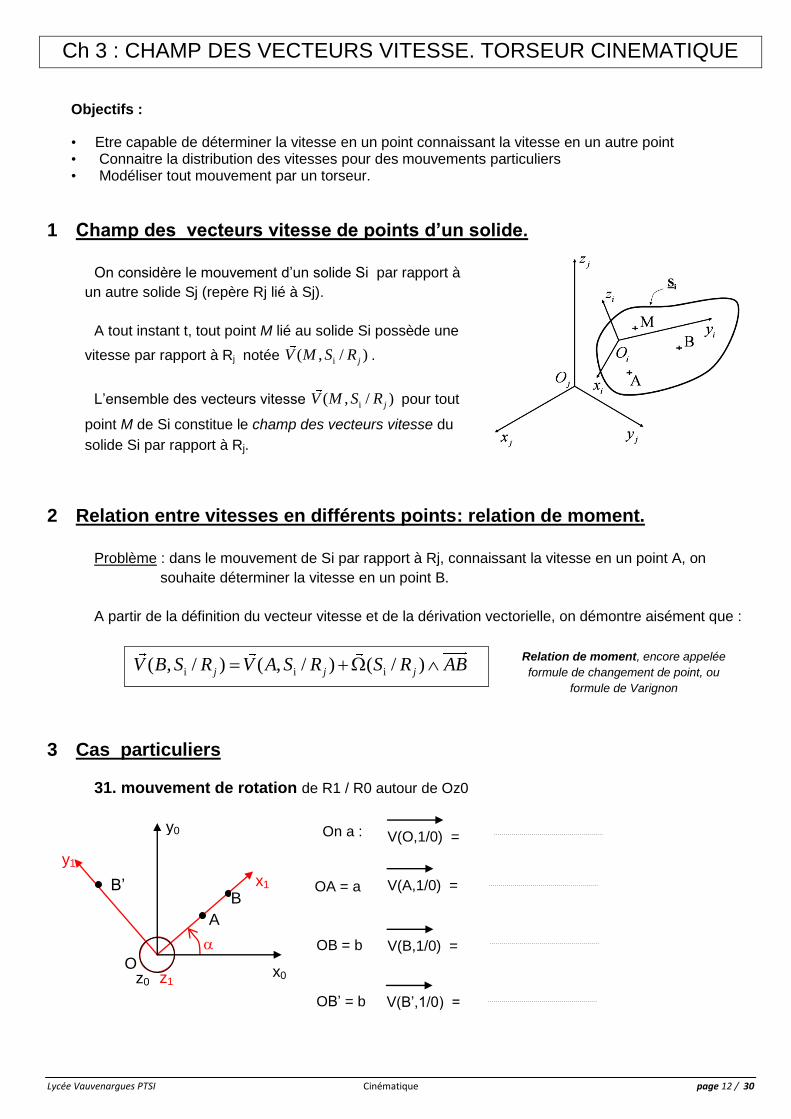
1 Champ des vecteurs vitesse de points d’un solide.
On considère le mouvement d’un solide Si par rapport à
un autre solide Sj (repère Rj lié à Sj).
A tout instant t, tout point M lié au solide Si possède une
vitesse par rapport à Rj notée i( , / )jV M S R .
L’ensemble des vecteurs vitesse i( , / )jV M S R pour tout
point M de Si constitue le champ des vecteurs vitesse du
solide Si par rapport à Rj.
2 Relation entre vitesses en différents points: relation de moment.
Problème : dans le mouvement de Si par rapport à Rj, connaissant la vitesse en un point A, on
souhaite déterminer la vitesse en un point B.
A partir de la définition du vecteur vitesse et de la dérivation vectorielle, on démontre aisément que :
i i i( , / ) ( , / ) ( / )j j jV B S R V A S R S R AB
3 Cas particuliers
31. mouvement de rotation de R1 / R0 autour de Oz0
V(O,1/0) =
V(A,1/0) = OA = a
V(B,1/0) = OB = b
x0 O
x1
y1
A
z1
y0
z0
B
V(B’,1/0) = OB’ = b
B’
On a :
Relation de moment, encore appelée
formule de changement de point, ou
formule de Varignon

Lycée Vauvenargues PTSI Cinématique page 13 / 30
32. mouvement de translation
Soit un solide 1 en translation par rapport à R0 de direction x0. Alors
Translation rectiligne : Si la trajectoire d’un point par rapport à un repère (donc de tout point) est
une droite.
Translation circulaire : Si la trajectoire d’un point par rapport à un repère (donc de tout point) est
un cercle.
.
Mécanisme 4 barres à parallélogramme déformable.
Translation quelconque :
Exemple : portes de métro : la trajectoire est donnée par une rainure au sol incurvée pour la
fermeture.
V(A,1/0) connu
V(B,1/0) =
x1
O1
y1
z1
Supposons
Alors
M
x
Instant t1 Instant t2
T(M, Ro)
x0
O
y0
z0
M
x
M
x
Instant t1
Instant t2 T(M, Ro)
1
A
B
V(A,1/0)
x0
O
y0
z0
x0
O
y0
z0
M
x

Lycée Vauvenargues PTSI Cinématique page 14 / 30
4 Torseur cinématique
On peut remarquer, à partir de la relation de moment, que pour déterminer la vitesse en tout point d’un solide par rapport à un repère, il nous faut connaître la vitesse en un autre point et le vecteur rotation correspondant.
Ces 2 renseignements sont réunis dans un seul outil mathématique appelé torseur. Il s’agira ici du torseur cinématique du mouvement de Si par rapport à Rj.
Notation :
i i i( , / ) ( , / ) ( / )j j jV B S R V A S R S R AB
Le mouvement quelconque d’un solide i par rapport à un solide j est alors modélisé par le
torseur cinématique { V i/j }.
5 Torseur cinématique des liaisons voir annexe jointe
6 Champ des accélération des points d’un solide
On considère le mouvement d’un solide Si par rapport à un autre solide Sj (repère Rj lié à Sj).
A tout instant t, tout point M lié au solide Si possède une accélération par rapport à Rj notée :
( , / )i jM S R .
L’ensemble des vecteurs accélération ( , / )i jM S R pour tout point M de Si constitue le champ des
vecteurs accélération du solide Si par rapport à Rj.
Soient A et B deux points liés au solide Si en mouvement par rapport à Rj. A partir de la relation de
moment, et après dérivation, on démontre que :
i i i i i( , / ) ( , / ) ( / ) ( / ) ( / )
j
j j j j j
R
dB S R A S R S R AB S R S R AB
dt
Cette formule est peu aisée d’application. En pratique, pour calculer une accélération en un point, on
calculera d’abord le vecteur vitesse (en utilisant par exemple la relation de moment), puis on dérivera
par rapport au temps.
Remarques :
Pour un mouvement de translation, la formule ci-dessus donne pour :
Si on qu’une composante de l’accélération sur par exemple :
On calcule , puis
Alors
soit :
centre de réduction du torseur
résultante du torseur cinématique
moment du torseur cinématique
ayant la propriété :
Ω (Si / Rj)
V(A,Si/Rj) A

Lycée Vauvenargues PTSI Cinématique page 15 / 30
ANNEXE SUR LES TORSEURS
C’est un outil mathématique construit par l’association :
d’un vecteur (donc indépendant du point d’écriture du torseur) appelé résultante du torseur :
d’un champ de vecteur appelé moment du torseur possédant la propriété de changement
de point suivante :
Notation : Représentation :
Somme de 2 torseurs et produit par un scalaire :
Soient 2 torseurs exprimés en un même point. Si ce n’est pas le cas, on applique la relation de
changement de point pour l’un des 2 torseurs :
et
Alors
et
(avec a réel)
Torseurs particuliers
Torseur nul : Torseur couple : Torseur glisseur :
Propriété de l’équiprojectivité
Le champ de moment d’un torseur
est équiprojectif , c’est-à-dire que :
quels que soient 2 points A et B de l’espace, on a :
Cette propriété servira pour des résolutions de cinématique graphique.
R
A
M(A)
R
Eléments de réduction du
torseur
Centre de réduction du
torseur

Lycée Vauvenargues PTSI Cinématique page 16 / 30
Ch 4 : COMPOSITION DES MOUVEMENTS
Objectifs :
• Établir les relations entre les différents mouvements des divers solides au sein d’un mécanisme • Définir une vitesse de glissement et un roulement sans glissement
1 Points coincidents.
On considère deux solides 1 et 2 en mouvements par rapport à Ro (liaison glissière 2/0 de direction
z0 et liaison pivot 1/0 d’axe Ox0). Ces deux solides sont également en contact entre eux en un point B.
A un instant t2, les 2 points ont suivis leurs trajectoires
respectives, et se retrouvent séparés.
A l’instant t1, on dit que les 2 points sont coïncidents, et
on notera B ce point commun.
Il est alors impératif de préciser à quel solide est lié le
point B lorsqu’on veut calculer sa vitesse ou son
accélération :
Ces vitesses sont toutes différentes (leurs trajectoires ne
sont pas les mêmes), mais sont liées entre elles.
A un instant t1, appelons :
B1 : le point B lié à 1 B2 : le point B lié à 2.

Lycée Vauvenargues PTSI Cinématique page 17 / 30
2 Composition des mouvements
Considérons deux solides1 et 2 en mouvement par rapport à un solide 0 (ou repère Ro).
Cette relation est une relation de Chasles. Elle peut s’écrire en faisant intervenir autant de solides
intermédiaires que voulus, à condition de respecter l’ordre relatif des indices. Toutes les vitesses sont
calculées au même point.
De même, pour les vecteurs rotation, nous pouvons écrire la relation suivante :
Les 2 relations précédentes peuvent être synthétisées par une relation sur les torseurs cinématiques :
, relation qui peut être généralisée à n solides.
3 Vitesse de glissement. Roulement sans glissement.
31. vitesse de glissement
Considérons 2 solides en contact permanent entre eux, en un point M.
On appelle vitesse de glissement de 2 par rapport à 1 la vitesse :
On peut indistinctement calculer les 3 vecteurs vitesse
suivants :
Entre ces vecteurs, on démontre la relation suivante :
plan tangent commun
au contact en M
Lycée Vauvenargues PTSI Cinématique page 18 / 30
Propriétés :
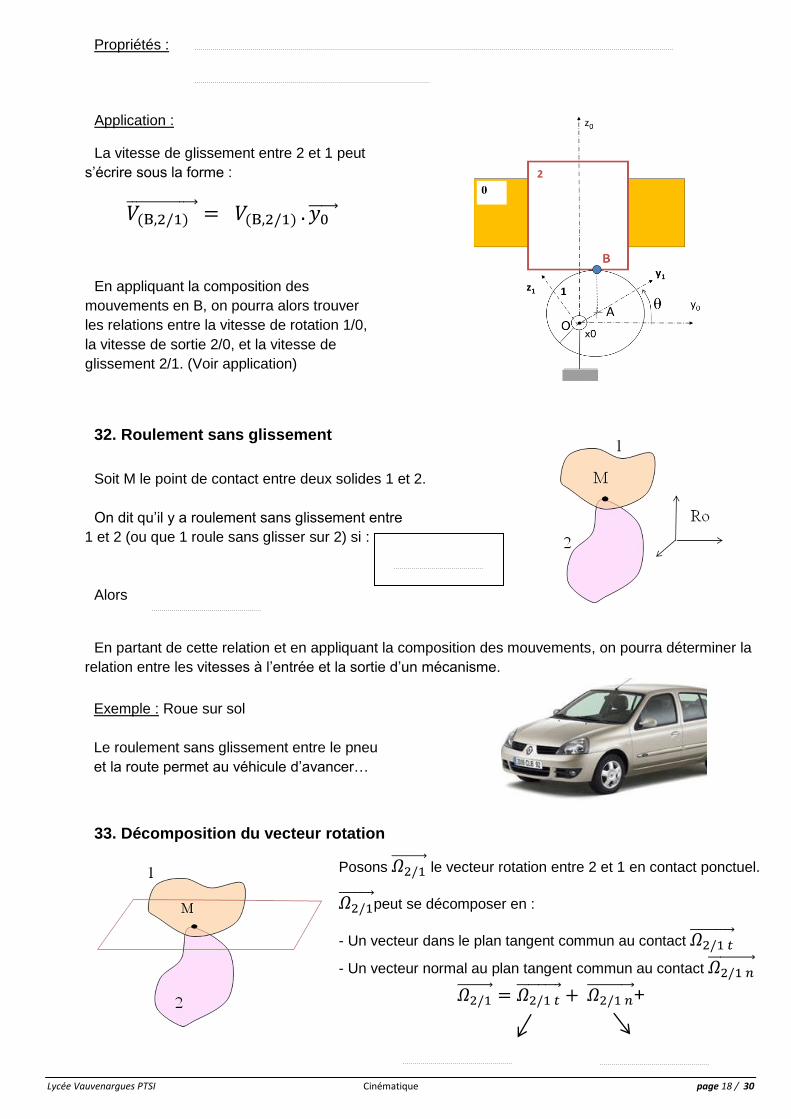
Application :
La vitesse de glissement entre 2 et 1 peut
s’écrire sous la forme :
En appliquant la composition des
mouvements en B, on pourra alors trouver
les relations entre la vitesse de rotation 1/0,
la vitesse de sortie 2/0, et la vitesse de
glissement 2/1. (Voir application)
32. Roulement sans glissement
Soit M le point de contact entre deux solides 1 et 2.
On dit qu’il y a roulement sans glissement entre
1 et 2 (ou que 1 roule sans glisser sur 2) si :
Alors
En partant de cette relation et en appliquant la composition des mouvements, on pourra déterminer la
relation entre les vitesses à l’entrée et la sortie d’un mécanisme.
33. Décomposition du vecteur rotation
Posons le vecteur rotation entre 2 et 1 en contact ponctuel.
peut se décomposer en :
- Un vecteur dans le plan tangent commun au contact
- Un vecteur normal au plan tangent commun au contact
+
Exemple : Roue sur sol
Le roulement sans glissement entre le pneu
et la route permet au véhicule d’avancer…
Voir application : Transmission par
engrenages

Lycée Vauvenargues PTSI Cinématique page 19 / 30
4 Composition des accélération des points d’un solide
où :
0( , / )M S R est l’accélération absolue du point M dans le mouvement de S par rapport à R0,
1( , / )M S R est l’accélération relative du point M dans le mouvement de S par rapport à R1,
0
1 1 0 1 0 1 1 0 1 0 1( , / ) ( / ) ( / ) ( / )entraînement
R
dO R R R R O M R R R R O M
dt
est l’accélération
d’entraînement du point M supposé attaché au repère R1 par rapport à R0, notée aussi 1 0( , / )M R R ,
1 0 12 ( / ) ( , / )Coriolis R R V M S R est l’accélération de Coriolis.
Cette formule est peu aisée d’application. En pratique, pour calculer une accélération en un point,
on calculera d’abord le vecteur vitesse (en utilisant par exemple la composition des mouvements
et/ou la formule de changement de point), puis on dérivera par rapport au temps.
Ch 5 : ANALYSE CINEMATIQUE GLOBALE D’UN MECANISME
Objectifs :
Proposer une modélisation géométrique d’un système mécanique
Mettre en place une méthodologie d’étude cinématique
Problème posé : A partir d’un cahier des charges ou des performances souhaitées d’un mécanisme, il nous
faut calculer les mouvements moteurs, ainsi que les mouvements dans les différentes
liaisons afin de justifier certaines solutions techniques.
1. Modélisation cinématique. (graphe de liaison)
1ère étape : recenser les différents ensembles cinématiques
2ème étape : faire l’inventaire des mouvements entre 2 ensembles cinématiques, en déduire les liaisons.
3éme étape : faire le graphe de liaisons
Considérons un solide1 en mouvement par rapport à un solide 0
(ou repère Ro).
Considérons un point M d’un solide S en mouvement par rapport
aux 2 repères Ro et R1.
On montre que :
0 1( , / ) ( , / ) entraînement CoriolisM S R M S R
On montre que :
Lycée Vauvenargues PTSI Cinématique page 20 / 30
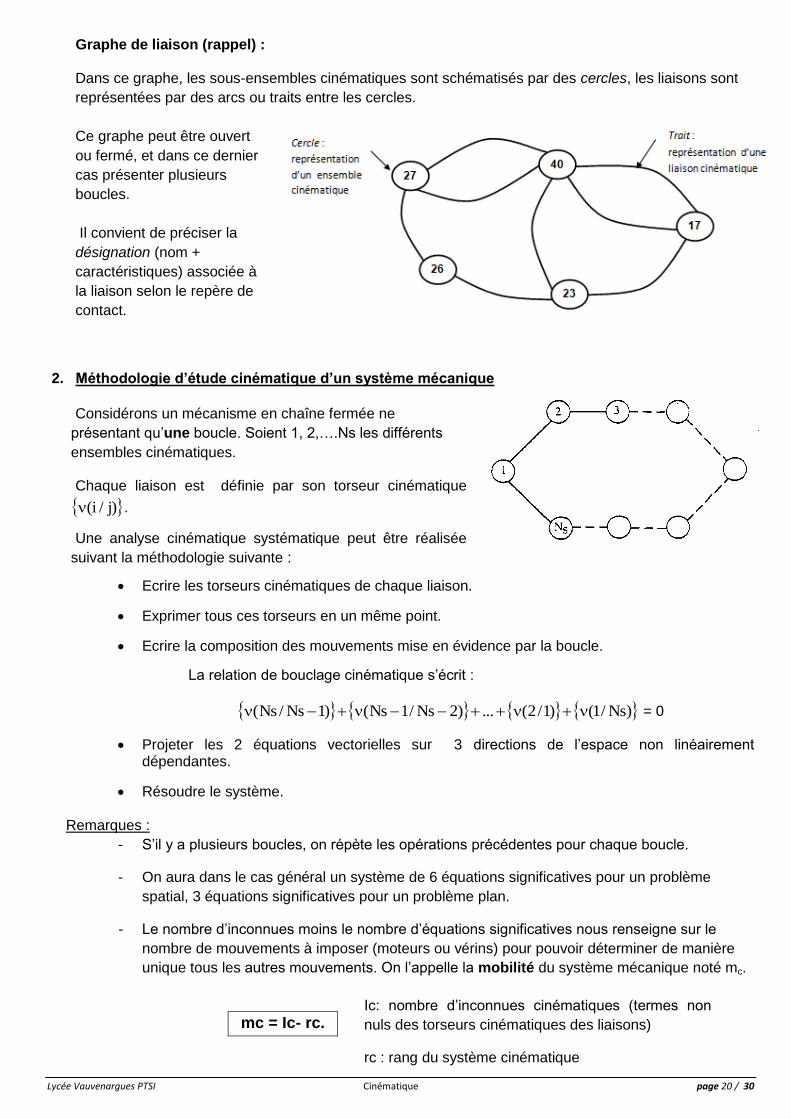
Graphe de liaison (rappel) :
Dans ce graphe, les sous-ensembles cinématiques sont schématisés par des cercles, les liaisons sont
représentées par des arcs ou traits entre les cercles.
Ce graphe peut être ouvert
ou fermé, et dans ce dernier
cas présenter plusieurs
boucles.
Il convient de préciser la
désignation (nom +
caractéristiques) associée à
la liaison selon le repère de
contact.
2. Méthodologie d’étude cinématique d’un système mécanique
Considérons un mécanisme en chaîne fermée ne
présentant qu’une boucle. Soient 1, 2,….Ns les différents
ensembles cinématiques.
Chaque liaison est définie par son torseur cinématique
)j/i( .
Une analyse cinématique systématique peut être réalisée
suivant la méthodologie suivante :
Ecrire les torseurs cinématiques de chaque liaison.
Exprimer tous ces torseurs en un même point.
Ecrire la composition des mouvements mise en évidence par la boucle.
La relation de bouclage cinématique s’écrit :
)Ns/1()1/2(...)2Ns/1Ns()1Ns/Ns( = 0
Projeter les 2 équations vectorielles sur 3 directions de l’espace non linéairement dépendantes.
Résoudre le système.
Remarques :
- S’il y a plusieurs boucles, on répète les opérations précédentes pour chaque boucle.
- On aura dans le cas général un système de 6 équations significatives pour un problème
spatial, 3 équations significatives pour un problème plan.
- Le nombre d’inconnues moins le nombre d’équations significatives nous renseigne sur le
nombre de mouvements à imposer (moteurs ou vérins) pour pouvoir déterminer de manière
unique tous les autres mouvements. On l’appelle la mobilité du système mécanique noté mc.
mc = Ic- rc.
Ic: nombre d’inconnues cinématiques (termes non
nuls des torseurs cinématiques des liaisons)
rc : rang du système cinématique
Lycée Vauvenargues PTSI Cinématique page 21 / 30
Ch 6 : METHODES DE RESOLUTION GRAPHIQUE
Objectifs :
Quantifier les vitesses de points de solides dans des positions définies
Proposer une alternative non calculatoire pour certains systèmes
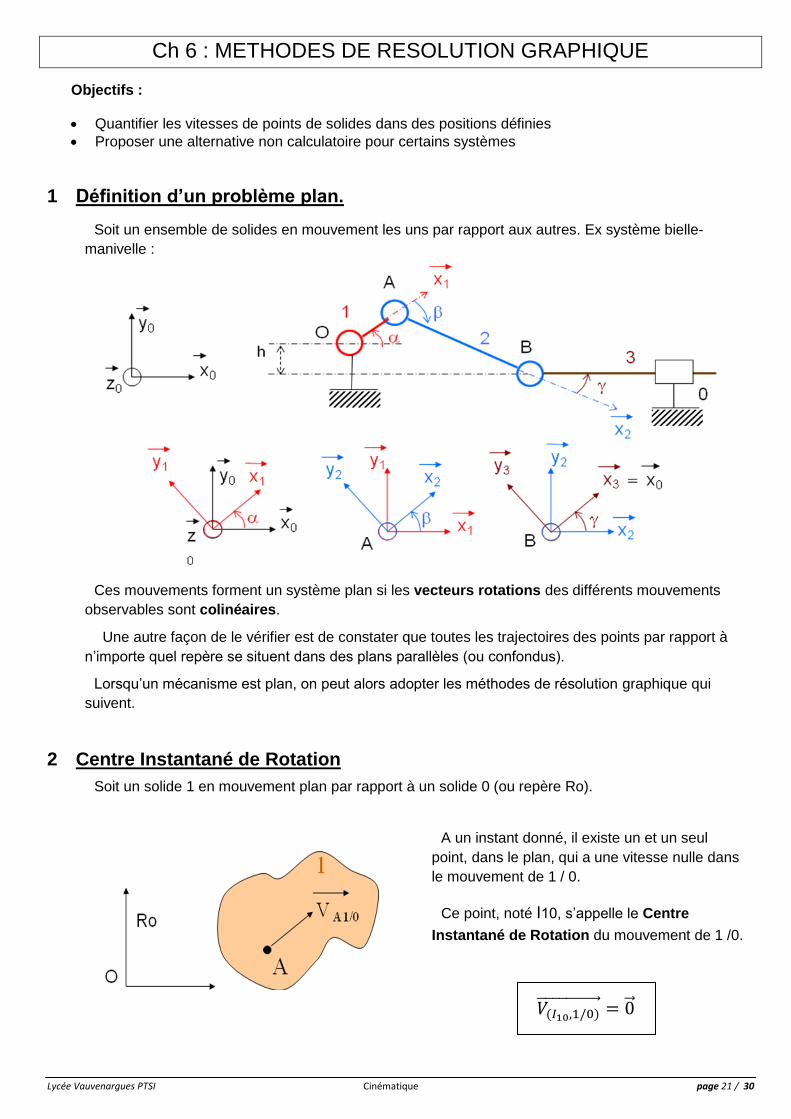
1 Définition d’un problème plan.
Soit un ensemble de solides en mouvement les uns par rapport aux autres. Ex système bielle-
manivelle :
Ces mouvements forment un système plan si les vecteurs rotations des différents mouvements
observables sont colinéaires.
Une autre façon de le vérifier est de constater que toutes les trajectoires des points par rapport à
n’importe quel repère se situent dans des plans parallèles (ou confondus).
Lorsqu’un mécanisme est plan, on peut alors adopter les méthodes de résolution graphique qui
suivent.
2 Centre Instantané de Rotation
Soit un solide 1 en mouvement plan par rapport à un solide 0 (ou repère Ro).
A un instant donné, il existe un et un seul
point, dans le plan, qui a une vitesse nulle dans
le mouvement de 1 / 0.
Ce point, noté I10, s’appelle le Centre
Instantané de Rotation du mouvement de 1 /0.

Lycée Vauvenargues PTSI Cinématique page 22 / 30
Propriétés :
vitesse AI10
• A un instant donné, le mouvement de 1/0 peut être assimilé à une rotation plane de centre I10.
• ll V (A,1/0) ll = AI10. ω 10.
• La positon de I10 peut être variable au cours du temps, d’où le nom de centre INSTANTANE de rotation.
Notation : on notera Iij le CIR de i dans son mouvement par rapport à j.
3 Relation entre vecteurs vitesses de 2 points d’un solide.
31. Méthode du C.I.R.
Considérons un solide 1 mouvement plan par rapport à un repère Ro. Supposons connu et le CIR I10
On souhaite tracer
32. Equiprojectivité
C’est la traduction graphique de la relation de changement de point des vecteurs vitesses. Pour un solide
(1) en mouvement par rapport à Ro, on a :
Si on projette cette expression sur la droite (AB), on a :
Soit :
Conclusion :
Dans le mouvement de 1/0, les vitesses en deux points quelconques A et B ont la même
projection sur l’axe AB.

Lycée Vauvenargues PTSI Cinématique page 23 / 30
Application :
Supposons connu et la direction de . On souhaite tracer
33. Remarques
Ce tracé n’est exploitable que si on dessine les vecteurs vitesses avec une échelle clairement indiquée. Il suffit alors de mesurer V(B,1/0) pour en connaitre sa valeur numérique.
La détermination de cette vitesse n’est valable que pour la position du tracé. Pour une autre position, il faut refaire tout le tracé.
4 Composition des mouvements
41. Traduction graphique
Entre 3 solides 0, 1 et 2, elle s’exprime en un point B par :
Cas 1 :
et sont connus :
Alors on en déduit .
Cas 2 :
connu et
Les directions de et sont connues :
Alors on en déduit et .
B
Direction
B
Direction
Lycée Vauvenargues PTSI Cinématique page 24 / 30
42. Alignement de 3 C.I.R.
.
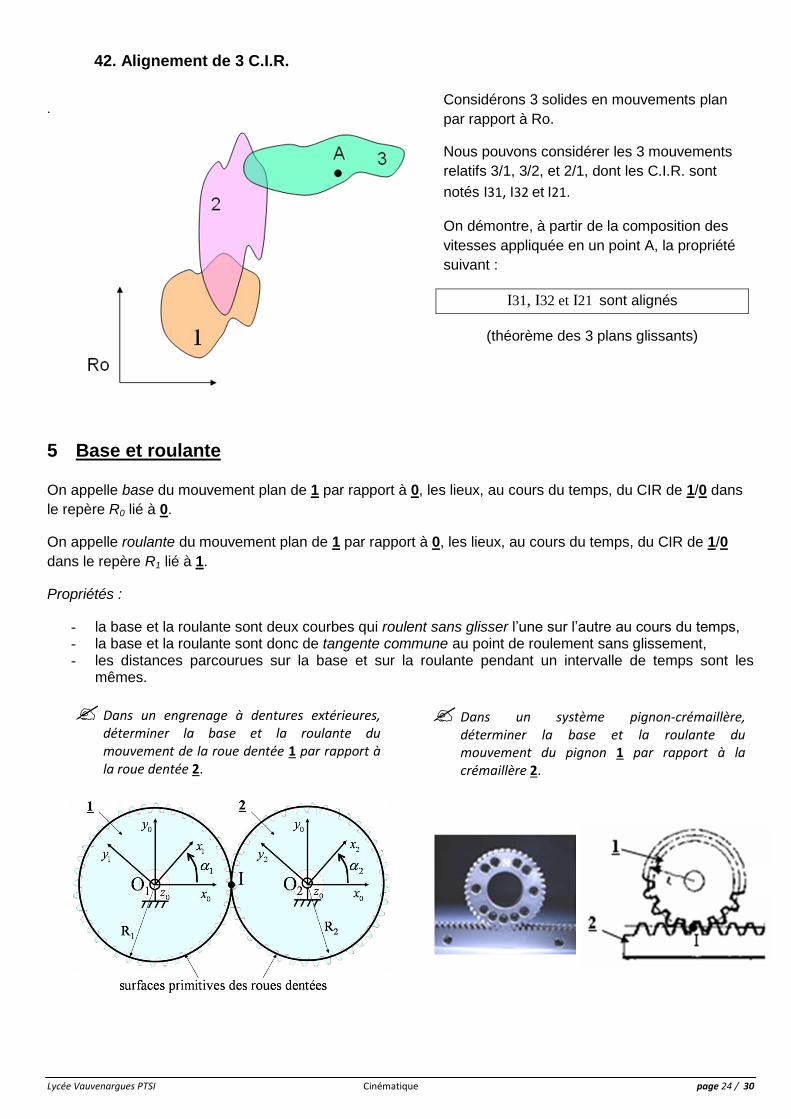
5 Base et roulante
On appelle base du mouvement plan de 1 par rapport à 0, les lieux, au cours du temps, du CIR de 1/0 dans
le repère R0 lié à 0.
On appelle roulante du mouvement plan de 1 par rapport à 0, les lieux, au cours du temps, du CIR de 1/0
dans le repère R1 lié à 1.
Propriétés :
- la base et la roulante sont deux courbes qui roulent sans glisser l’une sur l’autre au cours du temps, - la base et la roulante sont donc de tangente commune au point de roulement sans glissement, - les distances parcourues sur la base et sur la roulante pendant un intervalle de temps sont les
mêmes.
Considérons 3 solides en mouvements plan
par rapport à Ro.
Nous pouvons considérer les 3 mouvements
relatifs 3/1, 3/2, et 2/1, dont les C.I.R. sont
notés I31, I32 et I21.
On démontre, à partir de la composition des
vitesses appliquée en un point A, la propriété
suivant :
I31, I32 et I21 sont alignés
(théorème des 3 plans glissants)
Dans un engrenage à dentures extérieures, déterminer la base et la roulante du mouvement de la roue dentée 1 par rapport à la roue dentée 2.
Dans un système pignon-crémaillère, déterminer la base et la roulante du mouvement du pignon 1 par rapport à la crémaillère 2.

Lycée Vauvenargues PTSI Cinématique page 25 / 30
Ch 7 : DETERMINATION DE LIAISONS EQUIVALENTES
Objectifs :
Simplifier ou décomposer une chaîne de solides en vue de justifier les choix ou modifier une solution
technique.
Modéliser les liaisons à partir de l’analyse des surfaces en contact.
Préparer à l’étude de l’hyperstaticité des liaisons (programme 2ème année).
1. Liaison équivalente
Remarque : cette liaison équivalente n’est intéressante à déterminer que si elle correspond à une liaison
normalisée du tableau.
Pour déterminer cette liaison équivalente, il nous faut distinguer les cas de liaisons en série ou en
parallèle.
2. Liaisons en série
Elles correspondent à un extrait de graphe de liaison comme suit :
Le torseur cinématique de 4/1 doit traduire les mouvements possibles entre 4 et 1.
En appliquant la composition des mouvements, il vient :
Tous les torseurs doivent être exprimés au même point.
On en déduit alors, d’après la forme du torseur, le nom et les caractéristiques de la liaison équivalente.
1 2 3 4L1 L2 L3
1 4Léq.
1 2 3
4
L1 L2
L3 L4Ci-contre un extrait du graphe de liaison d’un mécanisme.
Afin de simplifier l’étude de ce mécanisme, on veut remplacer
l’ensemble des liaisons L1 à L4 par une seule liaison, appelée liaison
équivalente.
La liaison Léq. entre 1 et 3 sera cinématiquement équivalente
si elle autorise (ou empêche) les mêmes mouvements entre 1
et 3 que l’ensemble des liaisons L1 à L4.
Lycée Vauvenargues PTSI Cinématique page 26 / 30
Application 1 :
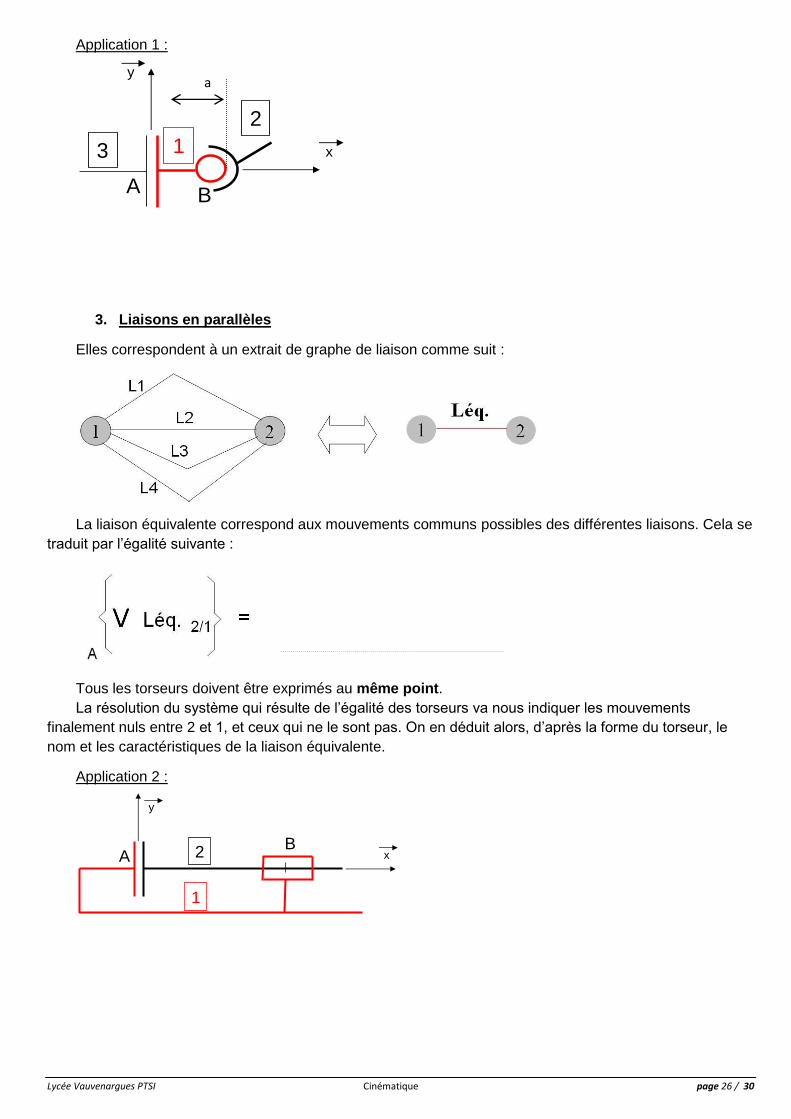
3. Liaisons en parallèles
Elles correspondent à un extrait de graphe de liaison comme suit :
La liaison équivalente correspond aux mouvements communs possibles des différentes liaisons. Cela se
traduit par l’égalité suivante :
Tous les torseurs doivent être exprimés au même point.
La résolution du système qui résulte de l’égalité des torseurs va nous indiquer les mouvements
finalement nuls entre 2 et 1, et ceux qui ne le sont pas. On en déduit alors, d’après la forme du torseur, le
nom et les caractéristiques de la liaison équivalente.
Application 2 :
1
BA
x
y
2
3
2AB
x
y
1
a
Lycée Vauvenargues PTSI Cinématique page 27 / 30
4. Exemples de solutions technologiques
Une liaison entre deux solides est réalisée par un ensemble de surfaces de contact aussi appelées
surfaces fonctionnelles. Ces éléments de contact seront considérées de forme parfaite, indéformables,
et de nature simple (point, droite, cercle, plan, cylindre, sphère).
Pour chacune des solutions suivantes, on distingue les surfaces fonctionnelles qui réalisent la Mise en
Position (MIP) des pièces et les éléments technologiques « classiques » (écrous, circlips…) qui réalisent
le Maintien en Position (MAP) des pièces.
Certaines surfaces de contact pourront-être prépondérantes par rapport à d’autres. On les hiérarchisera
en les nommant MIP1, MIP2, …
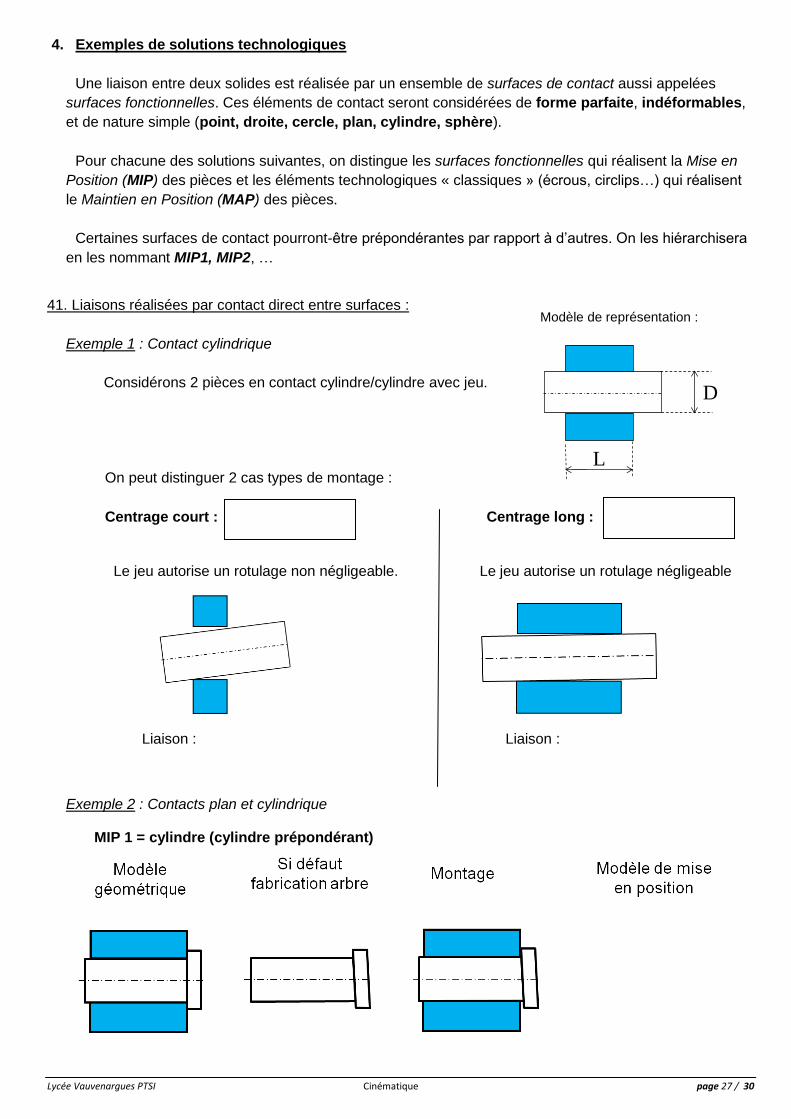
41. Liaisons réalisées par contact direct entre surfaces :
Exemple 1 : Contact cylindrique
Considérons 2 pièces en contact cylindre/cylindre avec jeu.
Le jeu autorise un rotulage non négligeable. Le jeu autorise un rotulage négligeable
Liaison : Liaison :
Exemple 2 : Contacts plan et cylindrique
MIP 1 = cylindre (cylindre prépondérant)
On peut distinguer 2 cas types de montage :
Centrage court : Centrage long :
Modèle de représentation :
L
D
Lycée Vauvenargues PTSI Cinématique page 28 / 30
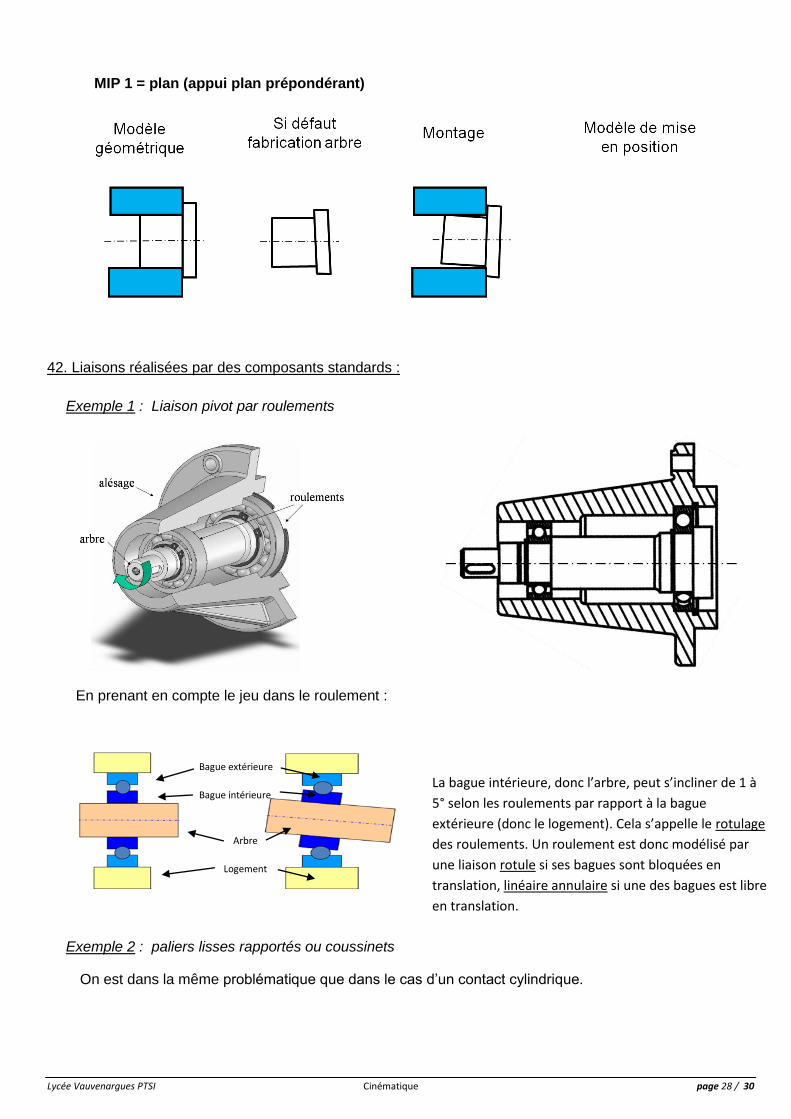
MIP 1 = plan (appui plan prépondérant)
42. Liaisons réalisées par des composants standards :
Exemple 1 : Liaison pivot par roulements
En prenant en compte le jeu dans le roulement :
Exemple 2 : paliers lisses rapportés ou coussinets
On est dans la même problématique que dans le cas d’un contact cylindrique.
La bague intérieure, donc l’arbre, peut s’incliner de 1 à
5° selon les roulements par rapport à la bague
extérieure (donc le logement). Cela s’appelle le rotulage
des roulements. Un roulement est donc modélisé par
une liaison rotule si ses bagues sont bloquées en
translation, linéaire annulaire si une des bagues est libre
en translation.
Bague extérieure
Bague intérieure
Arbre
Logement

Lycée Vauvenargues PTSI Cinématique page 29 / 30
Exemples de solutions technologiques de liaisons pivots
diminution du
frottement par ajout
d’une pièce
intermédiaire en bronze.
remplacement du contact
frottant par un contact
roulant pertes diminuées.
MIP :
MAP :
MIP :
MAP :
MIP : MAP :
montés serrés
dans l’alésage

Lycée Vauvenargues PTSI Cinématique page 30 / 30
Exemples de solutions technologiques de liaisons glissières
par contact direct : queue d’aronde (2 plans de normales concourantes) ou guide,
centrage long (L > 1,5 Ø) + clavette ou cannelures,
Exemples de solutions technologiques de liaisons encastrements
appui-plan prépondérant + centrage court (surface cylindrique avec L < 0,5 Ø ou pion) + vis de fixation,
centrage long prépondérant (L > 1,5 Ø) + appui-plan + arrêt rotation + circlips ou écrou
remplacement du contact
frottant par un contact roulant
pertes diminuées.
Clavette = arrêt en rotation
La clavette est montée serrée dans l’arbre et glissante dans le logement.