Chapter5 静定梁と静定ラーメン構造 - nagoya-cu.ac.jp5.2 静定梁 45 q=2 (a) t Ú (b)...
16
Chapter 5 静定梁と静定ラーメン構造 第4章で説明したトラス構造には軸力しか存在しないが、梁とラーメン構造には軸力だけでなく、せん断 力と曲げモーメントも存在する。本章では、静定梁および静定ラーメン構造の断面力を求める方法について 学ぶとともに、分布荷重、せん断力および曲げモーメントの関係を理解する。 5.1 静定・不静定の判定 4.2.3節で説明した Maxwell’s ルールは、ピン接合であるトラス構造の静定性・安定性判定に適用するが、 剛接合の梁やラーメン構造にはそのまま使えない。剛接合をピン接合に変換すると、梁とラーメン構造をト ラス構造に変換できるので、Maxwell’s ルールが使えるようになる。 剛接合をピン接合に変換することは、回転剛性を解放することを意味する。つまり、もともと一本の部材 (梁か柱か)で部材内部の剛体変位(回転)は生じないが、ピン接合に変換することによって剛体変位(回 転)ができるようになる。したがって、解放された回転剛性(曲げモーメント)も未知数としてカウントし ないといけない。回転剛性が解放された箇所の数を q とすれば、梁やラーメン構造より変換されたトラス構 造に対する、下記の Maxwell’s 条件式ができる。 ラーメン構造のための Maxwell’s 条件式: m − n × d + p + q > 0: 不静定かつ安定 = 0: 静定かつ安定 < 0: 不安定 (5.1) ここで、m はピン接合により接続されている部材の数、n は(トラス構造に変換された後の)ピン節 点の数、d は次元、p は変換された後のトラス構造の反力の数、q は剛接合をピン接合に変換した数で ある。 q=1 (a) (b) 図 5.1: 片持梁の静定・安定 例 5.1. 図 5.1(a) に示す片持梁、図 5.2(a) に示すゲルバー梁、図 5.3(a) に示す単純梁の静定性と安定性を 判定せよ。 図 5.1(a) に示す片持梁に対して、左側の固定支点の回転剛性を解放すると、図 5.1(b) に示すようなト ラス構造となる。この場合に、ひとつだけ回転剛性を解放したので、q = 1 となる。また、トラス構造に は、部材が一本 (m = 1)、節点が二つ (n = 2)、反力が左側のピン支点のみに二つ ( p = 2) ある。したがっ て、式 (5.1) のラーメン構造のための Maxwell’s 条件式に代入すると、 43
Transcript of Chapter5 静定梁と静定ラーメン構造 - nagoya-cu.ac.jp5.2 静定梁 45 q=2 (a) t Ú (b)...

Chapter 5静定梁と静定ラーメン構造
第4章で説明したトラス構造には軸力しか存在しないが、梁とラーメン構造には軸力だけでなく、せん断力と曲げモーメントも存在する。本章では、静定梁および静定ラーメン構造の断面力を求める方法について学ぶとともに、分布荷重、せん断力および曲げモーメントの関係を理解する。
5.1 静定・不静定の判定
4.2.3節で説明した Maxwell’sルールは、ピン接合であるトラス構造の静定性・安定性判定に適用するが、剛接合の梁やラーメン構造にはそのまま使えない。剛接合をピン接合に変換すると、梁とラーメン構造をトラス構造に変換できるので、Maxwell’sルールが使えるようになる。剛接合をピン接合に変換することは、回転剛性を解放することを意味する。つまり、もともと一本の部材
(梁か柱か)で部材内部の剛体変位(回転)は生じないが、ピン接合に変換することによって剛体変位(回転)ができるようになる。したがって、解放された回転剛性(曲げモーメント)も未知数としてカウントしないといけない。回転剛性が解放された箇所の数を qとすれば、梁やラーメン構造より変換されたトラス構造に対する、下記のMaxwell’s条件式ができる。
ラーメン構造のためのMaxwell’s条件式:
m−n×d + p+q
> 0 : 不静定かつ安定= 0 : 静定かつ安定< 0 : 不安定
(5.1)
ここで、mはピン接合により接続されている部材の数、nは(トラス構造に変換された後の)ピン節点の数、d は次元、pは変換された後のトラス構造の反力の数、qは剛接合をピン接合に変換した数である。
q=1
(a) (b)
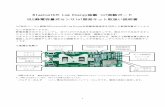
図 5.1:片持梁の静定・安定
例 5.1. 図 5.1(a)に示す片持梁、図 5.2(a)に示すゲルバー梁、図 5.3(a)に示す単純梁の静定性と安定性を判定せよ。
図 5.1(a)に示す片持梁に対して、左側の固定支点の回転剛性を解放すると、図 5.1(b)に示すようなトラス構造となる。この場合に、ひとつだけ回転剛性を解放したので、q = 1となる。また、トラス構造には、部材が一本 (m = 1)、節点が二つ (n = 2)、反力が左側のピン支点のみに二つ (p = 2)ある。したがって、式 (5.1)のラーメン構造のためのMaxwell’s条件式に代入すると、
43

44 5 静定梁と静定ラーメン構造
q=1
(a)
(b)
図 5.2:ゲルバー梁の静定性・安定性
(a) (b)
q=0
図 5.3:単純梁の静定性と安定性
m−n×d + p+q = 1−2×2+2+1= 0 (5.2)
となるので、片持梁は静定かつ安定である。図 5.2(a)に示すゲルバー梁を図 5.2(b)のトラス構造に変換する。ここで、真ん中のローラー支点上の
部分の回転剛性が解放されたため、q = 1である。また、トラス構造には、部材が三本 (m = 3)、節点が四つ (n = 4)、反力が合わせて四つ (p = 4)ある。したがって、式 (5.1)のラーメン構造のためのMaxwell’s条件式に代入すると、
m−n×d + p+q = 3−4×2+4+1= 0 (5.3)
となるので、ゲルバー梁は静定かつ安定である 1。図 5.3(a)に示す単純梁と図 5.3(b)のトラス構造は同じであるため、q = 0である。また、トラス構造に
は、部材が一本 (m = 1)、節点が二つ (n = 2)、反力が合わせて三つ (p = 3)ある。したがって、式 (5.1)のラーメン構造のためのMaxwell’s条件式に代入すると、
m−n×d + p+q = 1−2×2+3+0= 0 (5.4)
となるので、単純梁は静定かつ安定である。
例 5.2. 図 5.4(a)および図 5.5(a)に示すラーメン構造の静定性と安定性を判定せよ。
図 5.4(a)に示すラーメン構造を図 5.4(b)のトラス構造に変換するには、二つの剛接合をピン接合に変換したので、q = 2である。また、トラス構造には、、部材が三本 (m = 3)、節点が四つ (n = 4)、反力が合わせて三つ (p = 3)ある。したがって、式 (5.1)のラーメン構造のためのMaxwell’s条件式に代入すると、
1 一級建築士にでる静定・不静定、安定・不安定の判別式として、
n+ s+ r−2× k
> 0 : 不静定かつ安定(必要条件)= 0 : 静定かつ安定(必要条件)< 0 : 不安定(必要十分条件)
(5.5)
がある。ここで、nは支点反力の総数、sは部材数、rは剛節接合部材数、kは節点数である。
図 5.2(a)に示すゲルバー梁:n+ s+ r−2× k = 4+3+1−2×4 = 8−8 = 0 =⇒安定・静定図 5.5(a)に示すラーメン構造:n+ s+ r−2× k = 6+3+2−2×4 = 11−8 = 3 =⇒安定・3次不静定

5.2 静定梁 45
q=2
(a) (b)
図 5.4:ラーメン構造の静定性と安定性
q=4
(a) (b)
図 5.5:ラーメン構造の静定・安定
m−n×d + p+q = 3−4×2+3+2= 0 (5.6)
となるので、このラーメン構造は静定かつ安定である。図 5.5(a)に示すラーメン構造を図 5.5(b)のトラス構造に変換するには、二つの剛接合をピン接合に、二
つの固定支点をピン支点に変換したので、q = 4である。また、トラス構造には、、部材が三本 (m = 3)、節点が四つ (n = 4)、反力が合わせて四つ (p = 4) ある。したがって、式 (5.1) のラーメン構造のためのMaxwell’s条件式に代入すると、
m−n×d + p+q = 3−4×2+4+4= 3 (5.7)
となるので、このラーメン構造は 3次不静定であり、安定である。したがって、力およびモーメントの釣り合い方程式のみでは、このラーメン構造のすべての反力および断面力を求めることができない。
5.2 静定梁
静定梁の断面力を求めるには、通常は支点反力を先に求める必要がある。場合によっては、支点反力を求めなくても、次に示す片持梁のように断面力を直接求められることもある。解き方としては、梁の適当なところを(仮想的に)切断し、切断面に生じる断面力を釣り合い方程式によ
って求める。しかし、集中力がかかっているところの両側は同じ式で断面力を表現できないため、別々に計算しなければならない。また、トラス構造の場合に、同一部材内部の断面力(軸力)はどこでも同じであったが、梁やラーメン構造の場合には、場所によって断面力(軸力、せん断力、曲げモーメント)が異なるため、何らかの式で表現することが一般的である。
静定梁の計算手順:
1. 梁の静定性を判断する。2. 反力を求める(場合によっては省略できる)。3. 集中力を境に計算区間を分ける。4. 各計算区間において、部材を仮想的に切断し、切断面に断面力の正方向を描き名前を付ける。

46 5 静定梁と静定ラーメン構造
5. 切断された部分を対象に、力およびモーメントの釣り合い条件により、切断面における断面力を求める。
6. 梁全体の軸力、せん断力および曲げモーメントの分布を、それぞれ N図、Q図、M図に描く。
5.2.1 片持梁
θ
P
L1 L2 L1 L2
N
Q
(a) (c) -
Mx
y
AB
C A C
θ
P
L1 L2
(b) -
AB
C xx
x
x
xN
Q
Mx
x
x
x
y
図 5.6:片持梁の断面力の計算モデル
例 5.3. 図5.6に示す片持梁の断面力を求めよ。
静定性判定例 5.1の図 5.1(a)で計算したように、片持梁は静定構造である。したがって、力とモーメントの釣り合
い方程式のみで、反力と断面力を一意に求めることができる。断面力計算図5.6の片持梁の点 Bに(斜めの)集中力がかかっているため、この梁の計算区間は点 Bを境にして
AB間、BC間の二つの区間に分けられる。AB間の適当なところ 1⃝ 1⃝断面、BC間の適当なところ 2⃝ 2⃝断面でそれぞれ部材を仮想的に切断し、各断面力を正方向に図5.6(b)、(c)のように描く。ここで、切断面の右側を考慮した方が、反力が入っていないため、反力を先に求めなくても断面力を求めることができる。つまり、計算手順のステップ 2が省略できる(片持梁は、自由端から解く)。
AB間( 1⃝− 1⃝断面):
∑X =−Nx−Pcosθ = 0 =⇒ Nx =−Pcosθ∑Y = Qx−Psinθ = 0 =⇒ Qx = Psinθ∑M切断面まわり = Mx +Psinθ(L1− x) = 0 =⇒ Mx =−Psinθ(L1− x)
BC間( 2⃝− 2⃝断面):
∑X =−Nx = 0 =⇒ Nx = 0∑Y = Qx = 0 =⇒ Qx = 0∑M切断面まわり = Mx = 0 =⇒ Mx = 0
(5.8)
ここで、Mxは時計まわりを正方向(図5.6(c)によると下側は引張側となる)として計算しているので、計算結果が負となるというのは、この計算空間における実際の曲げモーメントが反時計まわりとなり、梁の上側が引張側となることを意味する。左端点 A(x = 0)、点 B(x = L1)、右端点 C(x = L1 +L2)といった代表点における断面力の値を下の表にま
とめる。
断面力 左端点 A(x = 0) 点 B(x = L1) 右端点 C(x = L1 +L2)
軸力(N) −Pcosθ −Pcosθ (左)、0(右) 0せん断力(Q) Psinθ Psinθ (左)、0(右) 0
曲げモーメント(M) −PL1 sinθ 0 0
(5.9)
また、図5.7に断面力の分布図を示す。
断面力の分布図を描くとき、軸力とせん断力には正方向が決められているため、符号を明記すれば、その分布図は梁の上側、下側のどちら側に描いても構わない。しかし、曲げモーメントは引張側に描かなければならない。曲げモーメントによる部材の変形図を、図5.8に示す。

5.2 静定梁 47
P
L1 L2
(a) N
AB
CcosP− θ
P
L1 L2
(b) Q
A BC
sinP+ θ
P
L1 L2
(c) M
A BC
1 sinPL θ
0 0 0
図 5.7:片持梁の断面力の分布図
+
-
図 5.8:曲げモーメントによる変形
曲げモーメントを引張側に描く理由は、構造設計において、引張応力と圧縮応力が生じるところで設計基準が異なることによる。特に、鉄筋コンクリート構造 (RC: Reinforced Concrete)の場合、コンクリートの引張強度はその圧縮強度の十分の一程度しかないため、コンクリートに引張応力が生じると、すぐにひび割れが発生してしまう。そのため、鉄筋コンクリート構造は、一体化されている鉄筋の引張強さを活かして、引張応力を鉄筋に負担させる仕組みとなっている。例えば、図5.9は、異なる載荷点および配筋量が、鉄筋コンクリート単純梁のひび割れに与える影響を調べるため、構造試験を行った後の写真である。単純梁の断面力計算の後、それぞれの説明を行う。
図 5.9:異なる載荷点および配筋量が鉄筋コンクリート単純梁のひび割れに与える影響
5.2.2 単純梁
例 5.4. 図5.10に示す単純梁の断面力を求めよ。
静定性判定例 5.1の図 5.3(a)で計算したように、単純梁は静定構造である。したがって、力とモーメントの釣り合
い方程式のみで、反力と断面力を一意に求めることができる。反力計算図5.10(b)の計算モデルによって、支点反力を求める。

48 5 静定梁と静定ラーメン構造
L
A B
P
HA
L
AB
VA VB
HA
A
VA
x
AVB
x
Nx
Qx
Mx
NxQx Mx
(a) (b)
(c)
Pa a
P Pa a
C D
AC
HA
A
VA
Nx
Qx
MxCD
Pa
x
C
L-x
DB
図 5.10:単純梁の断面力の計算モデル
∑X = HA = 0 =⇒ HA = 0∑M点 Aまわり = Pa+P(L−a)−VBL = 0 =⇒ VB = P (↑)∑Y =VA +VB−P−P = 0 =⇒ VA = 2P−VB = P (↑)
(5.10)
断面力計算梁に二つの集中荷重がかかっているため、図 5.10(c)に示すように AC間、CD間、DB間の三つの計算
空間に分けられる。したがって、断面力を求めるために、各計算空間において梁を適当なところで仮想的に切断し、各断面力を正方向に図5.10(c)のように描く。ここで、xは原点 Aからの距離である。各計算空間において、釣り合い方程式により断面力を求めると、以下のような計算となる。ただし、
DB間の計算については、切断面の右側を対象としている。
AC間(0≤ x≤ a)
∑X = Nx +HA = 0 =⇒ Nx =−HA = 0∑Y = VA−Qx = 0 =⇒ Qx =VA = P
∑M切断面まわり = VAx+Mx = 0 =⇒ Mx =−VAx =−Px
CD間(a < x≤ L−a)
∑X = HA +Nx = 0 =⇒ Nx =−HA = 0∑Y = −Qx +VA−P = 0 =⇒ Qx =VA−P = 0
∑M切断面まわり = Mx +VAx−P(x−a) = 0 =⇒ Mx = P(x−a)−VAx =−Pa
DB間(L−a < x≤ L)
∑X = −Nx = 0 =⇒ Nx = 0∑Y = Qx +VB = 0 =⇒ Qx =−VB =−P
∑M切断面まわり = Mx−VB(L− x) = 0 =⇒ Mx =VB(L− x) = P(L− x)(5.11)
左端 (x = 0)、中央点 (x = L/2)、右端 (x = L)といった代表点における断面力の値は、
断面力 左端点 A(x = 0) 中央点(x = L/2) 右端点 B(x = L)軸力(N) 0 0 0せん断力(Q) P 0 −P
曲げモーメント(M) 0 −Pa 0
(5.12)
となり、その分布図を図5.11に示す。
(a) N
0
(b) Q
0P
(c) M
P−Px ( )P L x−
Pa
図 5.11:単純梁の断面力の分布図
例 5.4は図5.9に示す構造実験の計算問題である。図 5.11の断面力分布図と比較すると、以下のことがわかる。

5.2 静定梁 49
• ふたつの集中荷重の間は、せん断力がゼロとなり、曲げモーメントが一定となる。したがって、RC梁も載荷点の間に(下側に)材軸と直交する方向にひび割れ(曲げひび割れ)が発生する。
• 載荷点と支持点の距離が短くなると、せん断力の大きさは変わらないが、最大曲げモーメントが小さくなる。したがって、載荷点の間に曲げひび割れが発生するよりも、支持点と載荷点の間に斜めのせん断ひび割れが発生し、最終的に曲げ破壊ではなく、せん断破壊となる。
L
A B
w
HA
L
AB
w
VA VB
x
HA
A
VA
x
HA
L
AB
wL
VA VB
HA
A
VA
x/2L/2
x
wx
Nx
Qx
Mx
Nx
Qx
Mx
(a)
(b) (c)
図 5.12:等分布荷重を受ける単純梁の断面力の計算モデル
例 5.5. 図5.12に示す等分布荷重を受ける単純梁の断面力を求めよ。
静定性判定例 5.1の図 5.3(a)で計算したように、単純梁は静定構造である。したがって、力とモーメントの釣り合
い方程式のみで、反力と断面力を一意に求めることができる。反力計算等分布荷重を集中荷重に変換し、図5.12(b)の計算モデルによって、支点反力を求める。
∑X = HA = 0 =⇒ HA = 0∑M点 Aまわり = (wL)L
2 −VBL = 0 =⇒ VB = wL2 (↑)
∑Y =VA +VB−wL = 0 =⇒ VA = wL−VB = wL2 (↑)
(5.13)
断面力計算単純梁に集中荷重がかかっていないため、計算区間はひとつしかない。したがって、断面力を求める
ために、梁を適当なところで仮想的に切断し、各断面力を正方向に図5.12(c)のように描く。ここで、切断面の左側を考え、点 Aを x軸の原点とする局所座標系を考える。取り出した部分の分布荷重を集中荷重に変換し、釣り合い方程式によって断面力を求めると、以下の
ような計算となる。
∑X = Nx +HA = 0 =⇒ Nx =−HA = 0∑Y =VA−Qx−wx = 0 =⇒ Qx =VA−wx = w
2 (L−2x)
∑M切断面まわり =VAx− (wx) x2 +Mx = 0 =⇒ Mx =−VAx+ wx2
2 = −wLx+wx2
2
(5.14)
ここで、Mx は時計まわりを正(図5.12(c)によると上側が引張側となる)として計算しているので、計算結果が負となるというのは、梁の下側が引張側となることを意味する。左端 (x = 0)、中央点 (x = L/2)、右端 (x = L)といった代表点における断面力の値は、
断面力 左端点 A(x = 0) 中央点(x = L/2) 右端点 B (x = L)軸力(N) 0 0 0せん断力(Q) wL
2 0 −wL2
曲げモーメント(M) 0 −wL2
8 0
(5.15)
となり、その分布図を図5.13に示す。ここで、せん断力は xの一次関数で、曲げモーメントは xの二次関数であることに注意して欲しい。

50 5 静定梁と静定ラーメン構造
(a) N
0
(b) Q
0/ 2wL+
/ 2wL−
(c) M
2 /8wL
図 5.13:等分布荷重を受ける単純梁の断面力の分布図
5.2.3 ゲルバー梁 (Gerber Beam)
L/2
AB
w
(a)
LL/2C D
L/2
A
B
wL
(b-1)
LL/2C D
VDVC
HA
VA L/2
A
wL/2
(b-2)
HA
VA
NB
QB
L/4
L/2
AHA
VA
NB
QB
図 5.14:ゲルバー梁の反力の計算モデル
HA
A
VA
x
HA
A
VA
x/2
x
wx
Nx
Qx
Mx
Nx
Qx
Mx
(a) AC (b) CD
D
VD2L-x
Nx
Qx Mx
xA
図 5.15:ゲルバー梁の断面力の計算モデル
例 5.6. 図5.14(a)に示すゲルバー梁の断面力を求めよ。
反力は四つあるため、構造物全体の釣り合い方程式だけでは解けない。ただし、3.2.3.4節で説明した 3ヒンジラーメン構造と同じように、点 Bのピン接合において曲げモーメントはゼロであることを利用すれば、もう一つの方程式が得られる。
反力計算:図5.14(b1)と (b2)の計算モデルによって、釣り合い方程式は以下のようにまとめられる。
∑X = HA = 0 =⇒ HA = 0(b−2) : ∑M点 Bまわり = VA(L/2)− (wL/2)(L/4) = 0 =⇒ VA = wL/4 (↑)(b−1) : ∑M点 Dまわり = VA(2L)+VCL− (wL)(3L/2) = 0 =⇒ VC = 3wL/2−2VA = wL (↑)
∑Y = VA +VC +VD−wL = 0 =⇒ VD = wL−VA−VC = wL−wL/4−wL =−wL/4 (↓)(5.16)

5.2 静定梁 51
断面力計算:ゲルバー梁の断面力を求めるため、図5.15に示す AC間と CD間の計算モデルを考える。ここで、計算
上便宜のため、AC間は切断面の左部分、CD間は切断面の右部分を対象とし、点 Aを局所座標系の原点とする。
AC間(0≤ x≤ L)
∑X = Nx +HA = 0 =⇒ Nx = HA = 0∑Y = VA−wx−Qx = 0 =⇒ Qx =VA−wx = wL
4 −wx
∑M切断面まわり = VAx−wx(x/2)+Mx = 0 =⇒ Mx =−VAx+wx2/2 =−wLx4 + wx2
2
CD間(L < x≤ 2L)
∑X = −Nx = 0 =⇒ Nx = 0∑Y = Qx +VD = 0 =⇒ Qx =−VD = wL
4
∑M切断面まわり = Mx−VD(2L− x) = 0 =⇒ Mx =VD(2L− x) =−wL2
2 + wL4 x
(5.17)
AC間において、曲げモーメントの極限(極小、極大)値はその一回微分(勾配、せん断力)がゼロになるところである。
dMx
dx=−wL
4+wx = 0 =⇒ x =
L4
(5.18)
点 A(x = 0)、極限値 (x = L/4)、点 B(x = L/2)、点 C(x = L)、点 D(x = 2L)といった代表点における断面力の値は、
断面力 点 A(x = 0) 極限値(x = L/4) 点 B (x = L/2)軸力(N) 0 0 0せん断力(Q) wL
4 0 −wL4
曲げモーメント(M) 0 −wL2
32 0
断面力 点 C(x = L) 点 D(x = 2L)軸力(N) 0 0せん断力(Q) − 3wL
4(左)、wL4(右)
wL4
曲げモーメント(M) wL2
4(左)、−wL2
4(右) 0
(5.19)
となり、その分布図を図5.16に示す。ここで、AC間のせん断力は xの一次関数で、曲げモーメントは xに関する二次関数であることに注意して欲しい。また、CD間のせん断力は定数で、曲げモーメントは xに関する一次関数である。点 Cにおいて集中力(反力)がかかるので、点 Cの左右でせん断力の値は異なるが、曲げモーメントの値は同じであることに注意して欲しい。図5.16(c)のM図より、ピン支点の点 A、点 D、およびピン接合の点 Bにおいて、曲げモーメントはゼ
ロであることも確認できる。
A
B
(a) N
C D
0 0
AB
(b) Q
C D
/ 4wL/ 4wL
3 / 4wL−
/ 4wL−
AB
(c) M
C D
2 / 4wL
2 / 32wL
図 5.16:ゲルバー梁の断面力の分布図

52 5 静定梁と静定ラーメン構造
5.3 MQw関係
本章の例題では、何回も出てきたが、曲げモーメントの次数はちょうどせん断力の次数より一次高い。これは偶然な関係ではなく、必然な関係であるため、本節でそれを証明する。
dx
Nx+dx
Qx+dx
Mx+dx
w(x)
Nx
Qx
Mx
図 5.17:MQ関係:微小な断片
図5.17に示す無限小の長さ dxを有する梁断片を考える。垂直方向の力の釣り合い方程式により、
∑Y = Qx−w(x)dx−Qx+dx = 0
=⇒ w(x) =−Qx+dx−Qx
dx=−dQ
dx(5.20)
がわかる。ここで、長さ dxは無限小であるため、分布荷重の変化を無視している。この式より、分布荷重w(x)はせん断力 Qx の一回微分であることがわかる。したがって、等分布荷重(0次関数)の場合には、せん断力の分布は一次関数、等変分布荷重(一次関数)の場合には、せん断力の分布は二次関数となることがわかる。一般的にまとめると、分布荷重が n次関数の場合には、せん断力の分布は n+1次関数となる。さらに、断片の右端まわりのモーメントの釣り合い方程式より、
M右端まわり =−Mx +Mx+dx−w(x)dx2/2+Qxdx = 0
=⇒ Qx =−Mx+dx−Mx
dx+w(x)dx/2 =−dM
dx(5.21)
がわかる。ここで、dxが無限小であるため、w(x)dx/2をゼロとして消している。この式より、せん断力 Qxは曲げモーメント Mx の一回微分であることがわかる。したがって、せん断力が一定(0次関数)の場合には、曲げモーメントの分布は一次関数、せん断力が一次関数の場合には、曲げモーメントの分布は二次関数となることがわかる。一般的にまとめると、せん断力が n次関数の場合には、曲げモーメントの分布は n+1次関数となる。さらに、せん断力がゼロの場合には、曲げモーメントは極限(極小か極大)値をとる。上記の二式により、分布荷重と曲げモーメントの関係
w(x) =dQdx
=ddx
dMdx
=d2Mdx2 (5.22)
が得られる。本節の関係式は、得られた断面力の分布が正しいかどうかの検算(検証)に使用できる。分布荷重、せん断力および曲げモーメントの次数の間には、以下の対応関係がある。
分布荷重、せん断力および曲げモーメントの関係:
分布荷重の次数 せん断力の次数 曲げモーメントの次数 荷重種類−1 0 1 集中荷重0 1 2 等分布荷重1 2 3 等辺分布荷重2 3 4n n+1 n+2
(5.23)

5.4 ラーメン構造の断面力分布 53
5.4 ラーメン構造の断面力分布
2L
A
B C
D
P
L/2
L/2
HA
VA
VD
(a) (b)
P
L/2
L/2
Ex
x
x
1
2
3
2L
図 5.18:静定ラーメン構造の反力の計算モデル
x2
HA
VA
Qx
NxMx
1x
(a) AE
VD
1x
A A
Qx
Nx
Mx
(b) EB
VD
Qx
NxMx
(c) BC
VD
Qx
NxMx
3x
(d) CD
DD
CB
D
C
図 5.19:静定ラーメン構造の断面力の計算モデル
例 5.7. 図5.18(a)に示すラーメン構造の断面力を求めよ。反力は、図5.18(b)のモデルによって以下のように計算できる。
反力計算:∑X = HA +P = 0 =⇒ HA =−P (←)
∑M点 Aまわり = P(L/2)−VD(2L) = 0 =⇒ VD = P/4 (↑)∑Y = VA +VD = 0 =⇒ VA =−VD =−P/4 (↓)
(5.24)
部材 ABの間に、集中力がかかっているため、部材 ABを AE間と EB間に分ける。それ以外の部材には集中力が作用していないため、それぞれの計算区間は BC間と CD間とする。また、各計算区間における局所座標系の取り方を、図5.18(a)に示す。静定ラーメン構造の断面力は、図5.19に示す各計算区間の計算モデルにより、以下のように求められる。
断面力計算:
AE間(0≤ x1 ≤ L/2)
∑Y = Nx +VA = 0 =⇒ Nx =−VA = P/4∑X = Qx +HA = 0 =⇒ Qx =−HA = P
∑M切断面まわり = Mx1 −HAx1 = 0 =⇒ Mx = HAx1 =−Px1
EB間(L/2 < x1 ≤ L)
∑Y = −Nx +VD = 0 =⇒ Nx =VD = P/4∑X = −Qx = 0 =⇒ Qx = 0
∑M切断面まわり = Mx−VD(2L) = 0 =⇒ Mx =VD(2L) = PL/2
BC間(0≤ x2 ≤ 2L)
∑X = −Nx = 0 =⇒ Nx = 0∑Y = Qx +VD = 0 =⇒ Qx =−VD =−P/4
∑M切断面まわり = Mx−VDx2 = 0 =⇒ Mx =VDx2 = Px2/4
CD間(0≤ x3 ≤ L)
∑Y = Nx +VD = 0 =⇒ Nx =−VD =−P/4∑X = Qx = 0 =⇒ Qx = 0
∑M切断面まわり = Mx = 0 =⇒ Mx = 0(5.25)

54 5 静定梁と静定ラーメン構造
断面力の分布を図5.20に示す。
A
BC
D
(a) N (b) Q
A
B C
D
0
(c) M
A
BC
D
E
/ 2PL
/ 2PL
/ 4P+
/ 4P− P+
/ 4P−0
00
図 5.20:静定ラーメン構造の断面力の分布図
5.5 合成ラーメン構造の断面力分布
合成ラーメン構造(合成骨組)とは、軸力のみが生じるトラス部材と、曲げモーメント、せん断力、軸力が生じる梁部材が混在した構造である。図5.21(a)に示す合成ラーメン構造では、両端がピン接合されている部材 EF、FGはトラス部材で軸力のみ発生し、その他の部材は荷重条件にもよるが、曲げモーメント、せん断力、軸力が生じる。
A
B C
D
√2P
L
L
HA
VA
VD
(a) (b)
E
x
x
x
1
2
3
LL
L
L
LL
F
G
√2P
図 5.21:合成ラーメン構造の反力の計算モデル
例 5.8. 図5.21(a)に示す合成ラーメン構造の断面力を求めよ。
合成骨組みの計算の流れは、先ず、構造全体の釣り合い式から反力を求める。次に、トラス部材の軸力を計算し、最後に通常のラーメン構造の計算により、部材の断面力(曲げモーメント、せん断力と軸力)を求める。反力は、図5.21(b)のモデルによって以下のように計算できる。
反力計算:∑X = HA−
√2Pcos45 = 0 =⇒ HA = P (→)
∑M点 Aまわり = −VD(2L) = 0 =⇒ VD = 0 (↑)∑Y = VA +VD−
√2Psin45 = 0 =⇒ VA = P (↑)
(5.26)
合成ラーメン構造のトラス部材の軸力は、図5.22に示す各計算区間の計算モデルにより、以下のように求められる。

5.6 計算結果の検算 55
A
B
D
√2P
VD
(a) (c)
E
L
L
B
G
√2P
HA
VA
C
(b)
NEF
NEF
NFG
LL
L
L
A
E
HA
VA
D
VD
G
C
FG
Qx
NxMx
Nx
Qx
Mx
N
図 5.22:合成ラーメン構造の断面力の計算モデル
トラス部材の軸力計算:AB間:
∑M点 Bまわり =−√
22 NEF L−HA2L = 0 =⇒ NEF =−2
√2HA =−2
√2P
CD間:∑M点 Cまわり =
√2
2 NFGL = 0 =⇒ NFG = 0
断面力計算:断面力の計算は、5.4節と同様に区間に分けて行う。部材 ABの間にトラス部材が取り付くため、部材
ABを AE間と EB間に分ける。同様に、部材 CD間にトラス部材が取り付くため、部材 CDを DG間とGC間に分ける。最後に、部材 BC間を、部材 BF間と FC間に分ける。ここでは、詳しい断面力計算の説明は省略する。断面力の分布を図5.23に示す。
A
B C
D
E
F
G
(a) N (b) Q (c) M
A
B C
D
E
F
G
A
B C
D
E
F
G
PL
PL-2√2P
-P
-P
P
P
-P
-P
P
P
図 5.23:合成ラーメン構造の断面力の分布図
5.6 計算結果の検算
梁とラーメン構造の反力および断面力の計算にはそこそこの計算量があるため、途中で計算ミスをしてしまう可能性がある。しかし、支点の種類や接合部の種類、またMQw関係など、既にわかっている力学的特性を利用すれば、計算ミスを見つけ出すことができる。具体的には、断面力の分布図を用いて、下記の三項目で確認する。

56 5 静定梁と静定ラーメン構造
断面力計算結果検算の三項目:
• ピン支点またはピン接合部の曲げモーメントがゼロになっているか。• 外力として曲げモーメントが作用しない場合、曲げモーメントの分布が連続しているか。• 曲げモーメント分布図とせん断力分布図の間に、式 (5.21)でまとめたMQ関係が満足されているか。
5.7 宿題
Exercise 5.1. 図 5.24に示す等変分布荷重が作用している単純梁に対して、
1.変形図を描け。2.断面力分布を求めよ。3.断面力の分布図を描け。
L
A B
w
図 5.24:等変分布荷重が作用している単純梁
Exercise 5.2. 図 5.25に示す曲げモーメントが作用している単純梁に対して、
1.変形図を描け。2.断面力分布を求めよ。3.断面力の分布図を描け。
L
A B
Ma
C
図 5.25:曲げモーメントが作用している単純梁
Exercise 5.3. 図 5.26に示すせん断力分布図に対応する曲げモーメント分布図を求めよ。
(a) Q (b) Q
02P
P--3P
P
L L L/3 L/3
-3P
L/3
A
B
C A
B
C D
図 5.26:せん断力分布図

5.7 宿題 57
Exercise 5.4. 図 5.27に示す曲げモーメント分布図に対応する荷重状態を求めよ。
(a) M (b) M
3PL
2PL
L 2L 2L L
PL
L
6PL
PL
A B C D A B C
図 5.27:曲げモーメント分布図
Exercise 5.5. 図 5.28に示す張出梁に対して、
1.変形図を描け。2.静定性を判定せよ。3.断面力分布を求めよ。4.断面力の分布図を描け。
L
AB
6P
L
C
L
D
8P
図 5.28:張出梁
Exercise 5.6. 図 5.29に示すゲルバー梁に対して、
1.変形図を描け。2.静定性を判定せよ。3.断面力分布を求めよ。4.断面力の分布図を描け。
L/2
AB
P
L/2
CD
L/2 L/2
E
図 5.29:ゲルバー梁
Exercise 5.7. 図 5.30に示す合成梁に対して、
1.変形図を描け。2.静定性を判定せよ。3.断面力分布を求めよ。4.断面力の分布図を描け。

58 5 静定梁と静定ラーメン構造
L
3L
A B
P
D
C
3L
図 5.30:合成梁
Exercise 5.8. 図 5.31に示すラーメン構造に対して、
1.変形図を描け。2.静定性を判定せよ。3.断面力分布を求めよ。4.断面力の分布図を描け。
2L
A
B C
D
L
w
図 5.31:ラーメン構造
Exercise 5.9. 図 5.32に示す 3ヒンジラーメン構造に対して、
1.変形図を描け。2.静定性を判定せよ。3.断面力分布を求めよ。4.断面力の分布図を描け。
L L
A
B C
D
L
E
w
図 5.32: 3ヒンジラーメン構造













![第5 章 相手情報の設定 - Fujitsu第5 章 相手情報の設定 5.1.3 remote autodial [機能]自動ダイヤル可否の設定 [入力形式]remote [] autodial](https://static.fdocuments.fr/doc/165x107/5eca0cfc81df7353c14a0b6c/c5-c-cfe-fujitsu-c5-c-cfe-513-remote.jpg)