Chapitre 3 Transformée en z -...
16
eivd Régulation numérique Chapitre 3 Transformée en z 3.1 Introduction La transformation en z est l’outil privilégié que l’on utilise dès que l’on doit traiter des signaux et des systèmes discrets. Déjà étudiée en détail en cours de traitement de signal, on se restreint, dans ce chapitre, à une présentation générale de la transformée en z , sans démonstrations. Dans le cadre de l’étude des systèmes analogiques, l’exploitation des propriétés remarquables de la transformée de Laplace a permis de gagner en efficacité dans l’analyse mathématique des systèmes dynamiques, les calculs à effectuer étant notablement allégés. Grâce à cet outil mathématique, la résolution d’équations différentielles, le calcul des régimes transitoires, l’analyse de la stabilité, puis, par suite, l’interconnection de systèmes analogiques dynamiques ont été considérable- ment facilités. On propose ici un outil équivalent, adapté aux signaux et systèmes discrets : il s’agit de la transformée en z . La transformée en z est au premier abord tout aussi obscure que celle de Laplace. Néanmoins, en gardant à l’esprit la nature temporelle d’un petit nombre de signaux fondamentaux et leurs transformées en z correspondantes, on peut très rapidement apprendre à analyser des signaux discrets sur la base unique de leur image dans le plan de z . En effet, si pour l’instant, le lien entre la transformée de Laplace X a (s)= 1 s - s 1 et le signal temporel analogique x a (t) x a (t)= (t) · e s 1 ·t Chapitre 3, v.1.6 91 mee \cours_rn.tex\18 janvier 2005
Transcript of Chapitre 3 Transformée en z -...

eivd Régulation numérique
Chapitre 3
Transformée en z
3.1 Introduction
La transformation en z est l’outil privilégié que l’on utilise dès que l’on doittraiter des signaux et des systèmes discrets. Déjà étudiée en détail en cours detraitement de signal, on se restreint, dans ce chapitre, à une présentation généralede la transformée en z, sans démonstrations.
Dans le cadre de l’étude des systèmes analogiques, l’exploitation des propriétésremarquables de la transformée de Laplace a permis de gagner en efficacité dansl’analyse mathématique des systèmes dynamiques, les calculs à effectuer étantnotablement allégés. Grâce à cet outil mathématique, la résolution d’équationsdifférentielles, le calcul des régimes transitoires, l’analyse de la stabilité, puis, parsuite, l’interconnection de systèmes analogiques dynamiques ont été considérable-ment facilités. On propose ici un outil équivalent, adapté aux signaux et systèmesdiscrets : il s’agit de la transformée en z.
La transformée en z est au premier abord tout aussi obscure que celle deLaplace. Néanmoins, en gardant à l’esprit la nature temporelle d’un petit nombrede signaux fondamentaux et leurs transformées en z correspondantes, on peut trèsrapidement apprendre à analyser des signaux discrets sur la base unique de leurimage dans le plan de z.
En effet, si pour l’instant, le lien entre la transformée de Laplace
Xa (s) =1
s− s1
et le signal temporel analogique xa(t)
xa (t) = ε(t) · es1·t
Chapitre 3, v.1.6 91 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
x a ( t )
t0
f _ 0 3 _ 0 5 . e p s
est parfaitement connu, s1 étant un pôle de Xa(s), les chapitres 3 et 4 du présentcours devraient permettre d’établir sans autres le même type de lien entre latransformée en z
X (z) =z
z − p1
et le signal temporel discret x(k),
x (k) = ε(k) · pk1
x ( k )
k0
f _ 0 3 _ 0 6 . e p s
p1 étant un pôle de X(z).
3.2 Signaux discrets
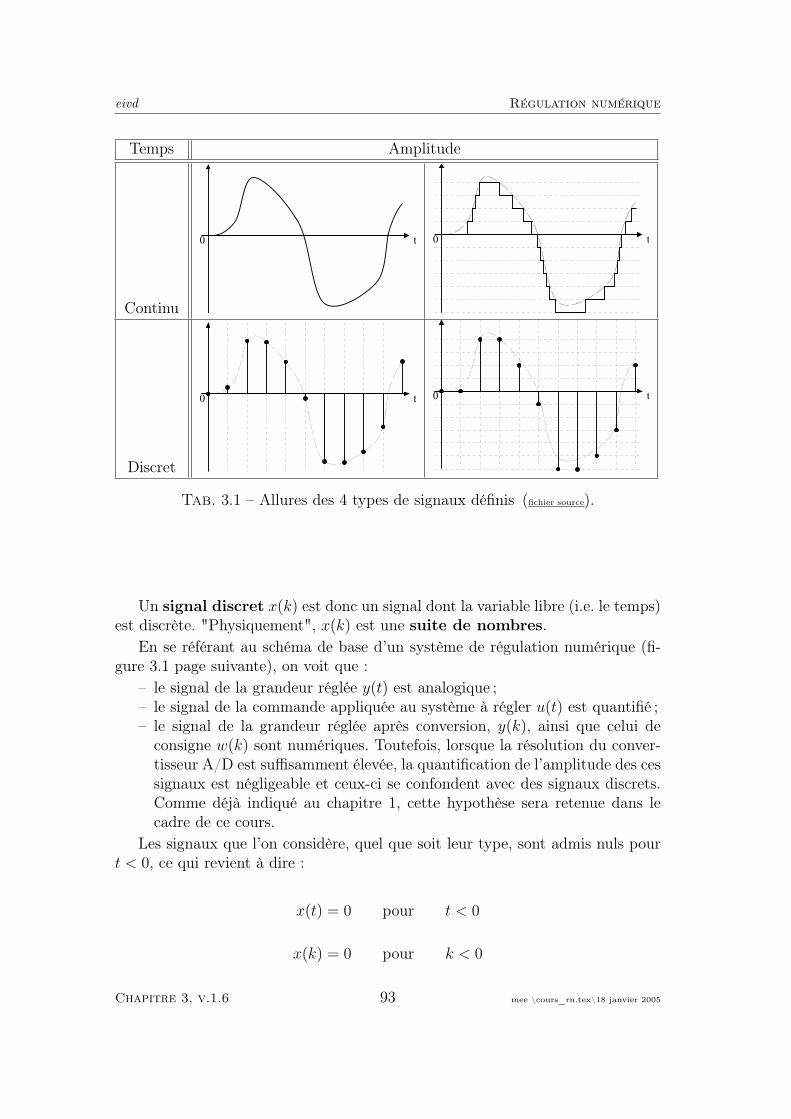
Selon que l’amplitude des signaux est définie de manière continue ou ne peutvarier que par valeurs discrètes, et selon que la variable libre, le temps t, évoluecontinûment ou de manière discrète, quatre types de signaux peuvent être définis :
Amplitude Temps1 signal analogique continue continu2 signal quantifié discrète continu3 signal discret continue discret4 signal numérique discrète discret
Graphiquement, ces quatre types de signaux ont les allures données dans letableau 3.2 page ci-contre ([[9], §2.4.1]).
Chapitre 3, v.1.6 92 mee \cours_rn.tex\18 janvier 2005
eivd Régulation numérique
Temps Amplitude
Continu
0 t 0 t
Discret
0 t 0 t
Tab. 3.1 – Allures des 4 types de signaux définis (fichier source).
Un signal discret x(k) est donc un signal dont la variable libre (i.e. le temps)est discrète. "Physiquement", x(k) est une suite de nombres.
En se référant au schéma de base d’un système de régulation numérique (fi-gure 3.1 page suivante), on voit que :
– le signal de la grandeur réglée y(t) est analogique ;– le signal de la commande appliquée au système à régler u(t) est quantifié ;– le signal de la grandeur réglée après conversion, y(k), ainsi que celui de
consigne w(k) sont numériques. Toutefois, lorsque la résolution du conver-tisseur A/D est suffisamment élevée, la quantification de l’amplitude des cessignaux est négligeable et ceux-ci se confondent avec des signaux discrets.Comme déjà indiqué au chapitre 1, cette hypothèse sera retenue dans lecadre de ce cours.
Les signaux que l’on considère, quel que soit leur type, sont admis nuls pourt < 0, ce qui revient à dire :
x(t) = 0 pour t < 0
x(k) = 0 pour k < 0
Chapitre 3, v.1.6 93 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
AD
AD
w ( k h )
y ( k h )
u ( t ) x ( t )u ( k h )
A N A L O G I Q U EN U M E R I Q U E
A L G O R I T H M E
S Y S T E M EA
R E G L E R
H O R L O G E
u ( k h )
k h
y ( k h )
k h
t
w ( k h )
k h t
h
t
y ( t )
v ( t )
S+
+
n ( t )
c o n s i g n e
b r u i t s u r l a m e s u r e
g r a n d e u r r é g l é e
c o m m a n d ec o m m a n d e
p e r t u r b a t i o n
f _ 0 1 _ 0 1 . e p s
Fig. 3.1 – Schéma fonctionnel d’un système de régulation numérique (fichier source).
3.2.1 Signaux discrets particuliers
L’impulsion unité discrète (figure 3.2 page ci-contre)
∆(k) =
{1 pour k = 00 pour k 6= 0
et le saut unité discret (figure 3.3 page suivante)
ε(k) =
{1 pour k ≥ 00 pour k < 0
sont les versions discrètes de l’impulsion de Dirac δ(t) et du saut unité ε(t)respectivement.
Ces deux signaux discrets présentent un intérêt tout particulier du point devue de l’analyse des propriétés du système étudié (gain statique, type, existencede modes oscillatoires, stabilité, etc).
Chapitre 3, v.1.6 94 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
−1 0 1 2 3 4 5
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
k
delta
(k)
IMPULSION UNITE DISCRETE
f_03_03_1.eps
Fig. 3.2 – Impulsion unité discrète ∆(k) (fichier source).
−1 0 1 2 3 4 5
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
SAUT UNITE DISCRET
k
epsi
lon(
k)
f_03_03_2.eps
Fig. 3.3 – Saut unité discret ε(k) (fichier source).
3.3 Transformée en z
3.3.1 Définition
La transformée en z X(z) d’un signal discret x(k) est donnée par :
X (z) =+∞∑
k=−∞
x (k) · z−k
où z est une variable complexe. Comme les signaux x(k) considérés dans ce coursne sont définis que pour k ≥ 0, la définition peut se restreindre à la transforméeen z unilatérale :
X (z) =+∞∑k=0
x (k) · z−k |z| > r0
Chapitre 3, v.1.6 95 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
On voit qu’il s’agit d’évaluer la somme :
X (z) = x (0) + x (1) · z−1 + x (2) · z−2 + x (3) · z−3 + . . .
Cette somme converge vers une valeur finie à condition que la valeur de z soit
R e
I m
0
C o n v e r g e n c e
D i v e r g e n c e
r 0
Z
f _ 0 3 _ 0 2 . e p s
Fig. 3.4 – Domaine de convergence de la transformée en z (fichier source).
située dans un domaine déterminé par son rayon de convergence r0 (figure 3.4).Si
|z| > r0
la somme converge, alors qu’on ne peut a priori rien dire du cas limite où z = r0.Géométriquement, le domaine de convergence est limité par un cercle de rayonr0.
3.3.2 Commentaire
La définition de la transformée en z qui a été adoptée, contrairement auxapparences, ne tombe pas du ciel. Elle s’inspire directement de celle de la trans-formée unilatérale de Laplace,
X(s) = L{x(t)} =
∫ +∞
0
x (t) · e−s·t · dt s ≥ s0
où l’on voit que la fonction x(t) objet de la transformation est multipliée dansl’espace temps par une fonction de type exponentiel. Ce faisant, pour autant que
Chapitre 3, v.1.6 96 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
la variable complexe s ait une valeur assurant la convergence, la surface compriseentre l’axe du temps t et la fonction
x (t) · e−s·t
est finie et l’intégrale existe.Il en va exactement de même pour la transformée en z, développée pour
les signaux discrets sur un principe identique. On multiplie, i.e. on pondère lafonction
x(k)
par une fonction de type exponentiel
z−k
qui pourrait être (esh)−k et l’on somme ("intègre") le produit
x(k) · z−k
sur tous les k, cette somme ne convergeant que pour un ensemble de valeurs dez telles que |z| > r0 :
X (z) =+∞∑k=0
x (k) · z−k = x (0) + x (1) · z−1 + x (2) · z−2 + x (3) · z−3 + . . .
3.3.3 Exemples
Exemple : transformée en z de l’impulsion unité discrète ∆(k)
Rappelant la définition de ∆(k) :
∆(k) =
{1 pour k = 00 pour k 6= 0
on voit que sa transformée en z s’écrit simplement
X (z) =+∞∑k=0
x (k) · z−k = x (0) + x (1) · z−1 + x (2) · z−2 + . . . = 1 ∀z
La similitude avec la transformée de Laplace de l’impulsion de Dirac ne peutéchapper à personne !
Chapitre 3, v.1.6 97 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
Exemple : transformée en z d’un signal exponentiel ([[4], §4.2])
Soit le signal discret défini par :
x (k) = ak·h a ∈ C a 6= 0
Sa transformée en z est par application de la définition :
X (z) =+∞∑k=0
ak·h · z−k =+∞∑k=0
(ah · z−1
)k=
1
1− ah · z−1=
z
z − ah|z| >
∣∣ah∣∣ = r0
Notons que le résultat obtenu confirme ce qui est déjà connu de la théorie desprogressions géométriques ; soit une telle progression de raison r :
r0, r1, r2, r3, . . . , rn−1
La somme des n premiers termes de cette progression s’écrit :
Sn =n−1∑i=0
ri = 1 + r1 + r2 + r3 + . . . + rn−1
Pour n tendant vers l’infini, on trouve le résultat bien connu
S∞ =1
1− r
valable exclusivement pour |r| < 1.Ce résultat correspond à la transformée en z précédemment calculée, en posant
r = ah · z−1
Exemple : signal de durée finie ([[4], §4.2])
Soit le signal discret de durée finie de la figure 3.5 page suivante. Sa transfor-mée est simplement :
Z {x(k)} = X(z) =+∞∑k=0
x (k) · z−k = 1 + 3 · z−1 − 2 · z−2
3.3.4 Propriétés
On passe en revue ci-après quelques propriétés importantes de la transforma-tion en z, sans les démontrer, puisqu’il s’agit d’un rappel de ce qui a déjà été vudans le cadre du cours de traitement de signal. Les propriétés que l’on relèveratout particulièrement sont celles :
– de la translation avant (signal retardé) (p.99 ) ;– du produit de convolution (p.100 ) ;– de la valeur finale (p.170 ).
Les propriétés énoncées sont comparables à celles de la transformée de Laplace.
Chapitre 3, v.1.6 98 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
−1 0 1 2 3 4 5
−2
−1
0
1
2
3
Signal discret de durée finie
k
x(k)
f_03_03_3.eps
Fig. 3.5 – Signal discret de durée finie (fichier source).
Linéarité
La transformée en z d’une combinaison linéaire de signaux est égale à lacombinaison linéaire des transformées en z des signaux respectifs :
Z{a · x(k) + b · y(k)} = a · Z{x(k)}+ b · Z{y(k)} = a ·X(z) + b · Y (z)
Translation avant (signal retardé)
La transformée en z d’un signal discret retardé de d périodes d’échantillon-nage est donnée par la transformée en z du signal non-retardé multipliée parz−d :
Z{x (k − d)} = z−d · Z{x (k)} = z−d ·X (z)
Cette propriété est fondamentale et offre en particulier l’opérateur "retard d’unepériode d’échantillonnage",
z - 1u ( k ) y ( k ) = u ( k - 1 )f _ 0 3 _ 0 7 . e p s
indispensable dans le traitement numérique des signaux.
Chapitre 3, v.1.6 99 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
Exemple : schéma fonctionnel détaillé d’un dérivateur numérique. Ledérivateur numérique est un opérateur approximant la dérivée du signal appliquéà son entrée. Une première manière de procéder consiste à écrire que
u̇ =du
dt≈ u (k)− u (k − 1)
h= y (k)
Graphiquement, on peut représenter cette opération à l’aide de gains, sommateuret de retards élémentaires.
z - 1
u ( k ) S 1 / h y ( k )
-f _ 0 3 _ 0 8 . e p s
Translation arrière (signal avancé)
La transformée en z d’un signal discret avancé de d périodes d’échantillonnageest :
Z{x (k + d)} = z+d · Z{x (k)} −d−1∑i=0
x (i) · zd−i = zd ·X (z)−d−1∑i=0
x (i) · zd−i
Se rappelant que l’axe du temps débute en k = 0, et que l’on a admis queles signaux sont nuls pour k < 0, on voit que cette relation élimine tous leséchantillons qui, par suite de la translation arrière, i.e. l’avance du signal, seraientdéfinis pour k < 0.
Produit de convolution
La transformée en z du produit de convolution de deux signaux discrets g(k)et u(k) est égale au produit des transformées en z de chacun des signaux.
Z{g (k) ∗ u (k)} = Z
{k∑
l=0
g(k − l) · u(l)
}= G (z) · U (z)
Cette transformation constitue la pierre angulaire de toute l’analyse des systèmesdiscrets par la transformée en z. Sans le bénéfice d’une telle propriété, la trans-formée en z ne serait d’aucune utilité. Le parallélisme avec la transformée deLaplace est évident :
Y (s) = L{y(t)} = L{∫ t
−∞g(t− τ) · u(τ) · dτ
}= L{g(t) ∗ u(t)}
Chapitre 3, v.1.6 100 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
Théorème de la valeur finale
La valeur finale d’un signal discret x(k) peut se calculer par :
x∞=x (∞) = limk→∞
x (k) = limz→1
((z−1) ·X (z))
Cette formule s’avérera très utile ultérieurement pour calculer le gain permanentde systèmes dynamiques linéaires discrets.
Théorème de la valeur initiale
La valeur initiale d’un signal discret x(k) peut se calculer par :
x (0) = limk→0
x (k) = limz→∞
X (z)
3.3.5 Méthodes de calcul de la transformée en z
Il est rare qu’il soit nécessaire de calculer la transformée en z selon la formule
X (z) =+∞∑k=0
x (k) · z−k
En général, on dispose de tables où les transformées en z d’un certain nombre designaux de base sont données. Une telle table se trouve en annexe de ce chapitre.Un signal ne figurant pas dans la table peut souvent s’exprimer par une combi-naison linéaire de signaux élémentaires dont les transformées sont alors dans latable. Ces dernières, combinées linéairement, permettent, en faisant usage de lapropriété de linéarité, d’obtenir la transformée en z recherchée.
Exemple
On se propose de calculer la transformée en z du signal discret x(k) (figure 3.6page suivante) résultant de l’échantillonnage du signal analogique
x (t) = ε(t) ·(1− e−
tT
)qui représente par exemple la réponse indicielle d’un filtre passe-bas de premierordre.
Avecx (t) = ε(t) ·
(1− e−
tT
)on a
x (k) = ε (k) ·(1− e−
hT·k)
La transformée en z étant une opération linéaire, on peut écrire :
Chapitre 3, v.1.6 101 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
x ( k )
k0
f _ 0 3 _ 0 9 . e p s
Fig. 3.6 – Signal numérique x(k) dont la transformée en z est calculée en exemple(fichier source).
X (z) = Z{x (k)} = Z{ε (k)} − Z{
ε (k) · e−hT·k}
Le recours à la table des transformées en z de l’annexe 3.A fournit directementles transformées du saut unité et de l’exponentielle : il s’agit des transformées 3et 6. De ce fait, on a pour X(z) :
X (z) = Z{x (k)} =z
z − 1− z
z − e−hT
=z ·
(1− e−
hT
)(z − 1) ·
(z − e−
hT
)L’application du théorème de la valeur finale donne
x∞ = limk→∞
x (k) = limz→1
(z − 1) ·X (z) = limz→1
(z − 1) ·z ·
(1− e−
hT
)(z − 1) ·
(z − e−
hT
) = 1
De même, celui de la valeur initiale fournit la limite :
limk→0
x (k) = limz→∞
X (z) = limz→∞
z ·(1− e−
hT
)(z − 1) ·
(z − e−
hT
) = 0
3.3.6 Inversion de la transformée en z
On examine ici deux méthodes souvent utilisées pour inverser la transforméeen z d’un signal discret. Il en existe d’autres, notamment celle de l’intégrationdans le plan complexe [4], qui présente un intérêt essentiellement académique,raison pour laquelle on renoncera à sa présentation.
Chapitre 3, v.1.6 102 mee \cours_rn.tex\18 janvier 2005

eivd Régulation numérique
Décomposition en éléments simples
L’inversion de la transformée en z s’effectue le plus souvent à l’aide de tables.La transformée à inverser doit être décomposée en éléments simples, les trans-formées inverses de ceux-ci se trouvant en général dans la table. Si l’on veutprocéder de manière systématique pour cette décomposition, on peut faire usagedu théorème des résidus (voir [5], §2.3.3).
Exemple ([6])
Soit la transformée en z X(z) d’un signal discret x(k) :
X (z) =0.1 · z · (z + 1)
(z − 1)2 · (z − 0.6)
avec h = 1 [s].En décomposant manuellement en élément simples
X (z) =a · zz − 1
+b · z
(z − 1)2 +c · z
z − 0.6
= . . .
=−z
z − 1+
0.5 · z(z − 1)2 +
z
z − 0.6
La table des transformées en z de l’annexe offre les transformées en z inverses dechacun des éléments simples :
x (k) = Z−1{X (z)} =(−1 + 0.5 · k · h + 0.6k
)· ε(k)
Les premiers échantillons de x(k) sont donc :
x (0) = −1 + 0 + 1 = 0
x (1) = −1 + 0.5 + 0.6 = 0.1
x (2) = −1 + 0.5 · 2 + 0.62 = 0.36
. . .
Chapitre 3, v.1.6 103 mee \cours_rn.tex\18 janvier 2005

eivdR
égulatio
nnumér
ique
Inversion par division polynômiale
La suite de nombres x(k) ayant pour transformée en z X(z) peut être obtenue très simplement par la division formelledu numérateur par le dénominateur de X(z). Partant de
X(z)=z−d · b0 + b1 · z−1 + ... + bm−1 · z1−m + bm · z−m
1 + a1 · z−1 + . . . + an−1 · z1−n + an · z−n
on effectue donc la division :b0 · z−d + b1 · z−1−d + ... + bm−1 · z1−n + bm · z−n 1 + a1 · z−1 + . . . + an−1 · z1−n + an · z−n
x (0) · z−d + x (1) · z−1−d + . . . + x (n) · z−n−d + x (n + 1) · z−n−1−d + . . .Les nombres x(k) cherchés ne sont autres que les coefficients du résultat de la division. Par rapport à la méthode précédente,x(k) n’est donc pas obtenu explicitement, mais sous la forme de ses valeurs numériques successives.
Exemple ([6])
Soit la transformée en z X(z) d’un signal discret x(k) :
X (z) =0.1 · z · (z + 1)
(z − 1)2 · (z − 0.6)=
0.1 · z2 + 0.1 · zz3 − 2.6 · z2 + 2.2 · z − 0.6
On effectue la division formelle :0.1 · z2 +0.1 · z z3 − 2.6 · z2 + 2.2 · z − 0.60.1 · z2 −0.26 · z +0.22 −0.06 · z−1
0.36 · z −0.22 +0.06 · z−1 0.1 · z−1 + 0.36 · z−2 + 0.716 · z−3 + . . .0.36 · z −0.936 +0.792 · z−1 −0.216 · z−2
0.716 + . . .
ce qui donne directe-
ment les valeurs des échantillons cherchées :
x (0) = 0 x (1) = 0.1 x (2) = 0.36 x (3) = 0.716
Chapitr
e3,
v.1.6
104m
ee\cou
rs_rn
.tex\18
janvier
2005

eivdR
égulatio
nnumér
ique
3.A Annexe : Table des transformées en z ([4])
f(t) L{f(t)} f(k) Z{f(k)}1 δ(t) 12 ∆(k) 13 ε(t) 1
sε(k) z
z−1
4 t 1s2 k · h h·z
(z−1)2
5 12· t2 1
s312· (k · h)2 h2
2· z·(z+1)
(z−1)3
6 e−a·t 1s+a
e−a·k·h zz−e−a·h
7 ak·h zz−ah
8 t · e−a·t 1(s+a)2
k · h · e−a·k·h h·e−a·h·z(z−e−a·h)
2
9 k · h · ak·h h·ah·z(z−ah)
2
10 sin (ω · t) ωs2+ω2 sin (ω · k · h) sin (ω·h)·z
z2−2·cos (ω·h)·z+1
11 cos (ω · t) ss2+ω2 cos (ω · k · h) z·(z−cos (ω·h))
z2−2·cos (ω·h)·z+1
12 e−a·t · sin (ω · t) ω(s+a)2+ω2 e−a·k·h · sin (ω · k · h) e−a·h·sin (ω·h)·z
z2−2·e−a·h·cos (ω·h)·z+e−2·a·h
13 e−a·t · cos (ω · t) s+a(s+a)2+ω2 e−a·k·h · cos (ω · k · h)
z·(z−e−a·h·cos (ω·h))z2−2·e−a·h·cos (ω·h)·z+e−2·a·h
14 ak·h · sin (ω · k · h) ah·sin (ω·h)·zz2−2·ah·cos (ω·h)·z+a2·h
15 ak·h · cos (ω · k · h)z·(z−ah·cos (ω·h))
z2−2·ah·cos (ω·h)·z+a2·h
16 1− e−a·t as·(s+a)
1− e−a·k·h (1−e−a·h)·z(z−1)·(z−e−a·h)
Chapitr
e3,
v.1.6
105m
ee\cou
rs_rn
.tex\18
janvier
2005

eivdR
égulatio
nnumér
ique
f(t) L{f(t)} f(k) Z{f(k)}
17 1a· (a · t− (1− e−a·t)) 1
s2·(s+a)1a·(a · k · h−
(1− e−a·k·h)) h·z
(z−1)2−
1−e−a·ha
·z(z−1)·(z−e−a·h)
18 1− (1 + a · t) · e−a·t 1s·(s+a)2
1− (1 + a · k · h) · e−a·k·h zz−1
− zz−e−a·h − e−a·h·a·h·z
(z−e−a·h)2
19 e−a·t − e−b·t b−a(s+a)·(s+b)
e−a·k·h − e−b·k·h (e−a·h−e−b·h)·z(z−e−a·h)·(z−e−b·h)
20 1 + b·e−a·t−a·e−b·t
a−ba·b
s·(s+a)·(s+b)1 + b·e−a·k·h−a·e−b·k·h
a−bz
z−1+ b
a−b· z
z−e−a·h + aa−b
· zz−e−b·h
21 e−a·t · cos(
πh· t
)s+a
(s+a)2+(πh)
2 e−a·k·h · cos (π · k) zz−e−a·h
22 12· t2 · e−a·t 1
(s+a)312· (k · h)2 · e−a·k·h h2
2· e−a·h·z·(z−e−a·h)
(z−e−a·h)3
Chapitr
e3,
v.1.6
106m
ee\cou
rs_rn
.tex\18
janvier
2005

















![Architecture des processeurs - HEIG-VD · Copyright ©2013 EMI, REDS@HEIG-VD Architecture des processeurs, p 7 Historique Référence [2]: Organisation et conception des ordinateurs](https://static.fdocuments.fr/doc/165x107/5f3fc96518d8157dfa5f3c0f/architecture-des-processeurs-heig-vd-copyright-2013-emi-redsheig-vd-architecture.jpg)
