Chapitre 1.X1 – L’intégrale numérique en cinématique
16
Note de cours rédigée par Simon Vézina Page 1 Chapitre 1.X1 – L’intégrale numérique en cinématique La cinématique numérique La cinématique numérique a pour objectif d’évaluer une position x et une vitesse x v à partir d’une valeur initiale de position i x , de vitesse xi v et de temps i t , de l’expression de l’accélération x a et d’un écoulement de temps t . Par la suite, on effectue plusieurs itérations à partir des valeurs calculées précédemment pour déterminer les autres valeurs de positions et de vitesses futures. Ordinateur portable À l’aide de la dynamique, l’équation de l’accélération ( ) t v x a a x x x , , = est une fonction entièrement connue qui dépend de x et x v et t et elle est obtenue à partir du concept de force F et de la 2 ième loi de Newton 1 ( a m F = ). Exemples : • Chute libre verticale : g a y − = où g : Accélération gravitationnelle constante (m/s 2 ) • Chute verticale avec résistance : y y v m b g a − − = y y y v v m b g a − − = (proportionnel à y v ) (proportionnel à 2 y v ) où g : Accélération gravitationnelle constante (m/s 2 ) b : Coefficient de frottement (kg s -1 , kg m -1 ) m : Masse de l’objet en chute (kg) • Système masse-ressort : x a x 2 0 − = ( ) t m F v m b x a x x ext ext 2 0 cos + − − = (libre) (amorti-entretenu) où 0 : Fréquence naturelle d’oscillation (rad/s) ( m k / 0 = , k : constante du ressort) b : Coefficient de frottement (kg s -1 ) ext F : Force du mouvement entretenu en newton (N) ext : Fréquence de l’oscillation entretenu/forcée (rad/s) m : Masse du bloc en oscillation (kg) 1 La 2 ième loi de Newton sera présentée dans la section Chapitre 2.1 – Les lois du mouvement de Newton.
Transcript of Chapitre 1.X1 – L’intégrale numérique en cinématique

Note de cours rédigée par Simon Vézina Page 1
Chapitre 1.X1 – L’intégrale numérique en cinématique
La cinématique numérique
La cinématique numérique a pour objectif d’évaluer une position x et une
vitesse xv à partir d’une valeur initiale de position ix , de vitesse xiv et de
temps it , de l’expression de l’accélération xa et d’un écoulement de temps
t . Par la suite, on effectue plusieurs itérations à partir des valeurs
calculées précédemment pour déterminer les autres valeurs de positions et
de vitesses futures.
Ordinateur portable
À l’aide de la dynamique, l’équation de l’accélération ( )tvxaa xxx ,,= est une fonction entièrement
connue qui dépend de x et xv et t et elle est obtenue à partir du concept de force F
et de la 2ième loi de
Newton1 ( amF
= ).
Exemples :
• Chute libre verticale :
ga y −=
où g : Accélération gravitationnelle constante (m/s2)
• Chute verticale avec résistance :
yy vm
bga −−= yyy vv
m
bga −−=
(proportionnel à yv ) (proportionnel à 2
yv )
où g : Accélération gravitationnelle constante (m/s2)
b : Coefficient de frottement (kg s-1, kg m-1)
m : Masse de l’objet en chute (kg)
• Système masse-ressort :
xax
2
0−= ( )tm
Fv
m
bxa xx ext
ext2
0 cos +−−=
(libre) (amorti-entretenu)
où 0 : Fréquence naturelle d’oscillation (rad/s) ( mk /0 = , k : constante du ressort)
b : Coefficient de frottement (kg s-1)
extF : Force du mouvement entretenu en newton (N)
ext : Fréquence de l’oscillation entretenu/forcée (rad/s)
m : Masse du bloc en oscillation (kg)
1 La 2ième loi de Newton sera présentée dans la section Chapitre 2.1 – Les lois du mouvement de Newton.

Note de cours rédigée par Simon Vézina Page 2
Définition des termes
Voici la liste des termes importants à définir avant d’appliquer une technique d’intégration numérique
pour évaluer une position fx et une vitesse fxv :
Terme connu Terme facile à évaluer Terme à évaluer
ix : Position initiale
xiv : Vitesse initiale
it : Temps initial
ft : Temps final
xia : Accélération initiale
fx : Position finale
fxv : Vitesse finale
Fonction entièrement connue
( )tvxaa xxx ,,= : Équation de l’accélération
Pas d’intégration
t : Intervalle de temps de l’intégration numérique
Remarque :
➢ Petit t Précision mais calcul simulation .
➢ Grand t Précision mais calcul simulation .
➢ Avec un bon algorithme, on peut maximiser la précision tout en gardant un t relativement grand
ce qui réduit le temps calcul pour une longue simulation.
L’intégration par la méthode d’Euler (ordre 1)
La méthode d’Euler propose d’utiliser uniquement les conditions initiales ( ix , xiv et it ) pour évaluer la
position finale fx et la vitesse fxv finale. Cette technique propose de déplacer l’objet à vitesse
constante et d’évaluer la vitesse finale avec une accélération initiale xia constante.
Voici l’algorithme de la méthode d’Euler :
1. Affectation des données initiales : ix , xiv et it
2. Évaluer l’accélération initiale : ( )ixiixxi tvxaa ,,=
3. Évaluer la position finale : tvxx xiif += (avec vitesse initiale)
4. Évaluer la vitesse finale : tavv xixifx +=
5. Évaluer le temps final : ttt if +=
Avantage : Facile à implanter (méthode naïve) et très rapide à calculer.
Désavantage : Méthode de résolution qui entraîne beaucoup d’imprécision. La solution diverge très
rapidement lorsque le t est grand.

Note de cours rédigée par Simon Vézina Page 3
L’intégration par la méthode d’Euler semi-implicite (ordre 1)
La méthode d’Euler semi-implicite propose de calculer la vitesse finale fxv avec l’accélération initiale
xia constante et de déplacer l’objet avec une vitesse constante égale à la vitesse finale fxv .
Voici l’algorithme de la méthode d’Euler inversé :
1. Identifier les données initiales : ix , xiv et it
2. Évaluer l’accélération initiale : ( )ixiixxi tvxaa ,,=
3. Évaluer la vitesse finale : tavv xixifx +=
4. Évaluer la position finale : tvxx fxif += (avec vitesse finale)
5. Évaluer le temps final : ttt if +=
Avantage : Facile à implanter et rapide à calculer. Plus de stabilité lorsqu’il y des accélérations
qui sont fonction de la position (comme un ressort) et propose des orbites fermée lors
d’une accélération radiale en 1 / r 2.
Désavantage : Méthode de résolution qui diverge rapidement pour une grande majorité de problème
comme ceux faisant intervenir la vitesse dans la définition de l’accélération (comme la
force magnétique).
L’intégration par la méthode Runge-Kutta d’ordre 4 (RK4)
La méthode Runge-Kutta d’ordre 4 (RK4) propose d’évaluer une position et une vitesse intermédiaire
afin de mieux estimer la position et la vitesse finale. Bien que cet algorithme ne soit pas unique,
l’implantation suivante propose de calculer des valeurs intermédiaires à un temps 2/tti + situées à
mi-chemin dans l’itération :
Voici l’algorithme de la méthode RK42 :
Calculs à la position initiale
1. Identifier les données initiales : ix , xiv et it
2. Évaluer l’accélération initiale : ( )ixiixxi tvxaa ,,=
2 Dans la littérature, on utilise régulièrement la notation suivante :
tak x = 01 , ( ) tak fx = 12 , tak midx =3 et ( ) tak fx = 24

Note de cours rédigée par Simon Vézina Page 4
Calculs à la 1ière position finale
3. Évaluer la position finale #1 : ( ) tvxx xiif +=1 (sans xia )
4. Évaluer la vitesse finale #1 : ( ) tavv xixifx +=1 (avec xia )
5. Évaluer le temps final #1 : ( ) ttt if +=1
6. Évaluer l’accélération finale #1 : ( ) ( ) ( ) ( )( )1111 ,, ffxfxfx tvxaa =
Calculs à la position à demi-temps
7. Évaluer la position milieu :
2
22
1
2
+
+=
ta
tvxx xixiimid (avec xia )
8. Évaluer la vitesse milieu : ( )24
1
4
31
taavv fxxiximidx
++= (avec xia , ( )1fxa )
9. Évaluer le temps milieu : 2
ttt imid
+=
10. Évaluer l’accélération milieu 2 : ( )midmidxmidxmidx tvxaa ,,=
Calculs à la 2ième position finale
11. Évaluer la position finale #2 : ( )2
22
1tatvxx xixiif ++= (avec xia )
12. Évaluer la vitesse finale #2 : ( ) ( ) taavv fxxixifx
++= 12
2
1
2
1 (avec xia , ( )1fxa )
13. Évaluer le temps final #2 : ( ) ttt if +=2
14. Évaluer l’accélération finale #2 : ( ) ( ) ( ) ( )( )2222 ,, ffxfxfx tvxaa =
Calcul de la position finale avec pondération de l’accélération
15. Évaluer la position fx : 2
3
2
3
1
2
1taatvxx midxxixiif
+++=
16. Évaluer la vitesse fxv : ( ) taaavv fxmidxxixifx
+++= 2
6
1
6
4
6
1
17. Évaluer le temps ft : ttt if +=
Avantage : Algorithme qui converge vers la solution exacte beaucoup plus rapidement même
avec un grand t .
Désavantage : Algorithme qui cause naturellement une atténuation lorsqu’il est utilisé lors
d’oscillation comme dans la simulation d’un système masse-ressort.

Note de cours rédigée par Simon Vézina Page 5
Preuve : (terme 15 et 16)
Soit un objet situé à la position 0x se déplaçant à la vitesse 0xv au temps 00 =t . À l’aide de la 2ième loi
de Newton
xx maF =
nous pouvons établir une relation
( )tvxaa xxx ,,=
nous permettant d’évaluer l’accélération 0xa à 00 =t . Évaluons la position x , la vitesse xv et
l’accélération xa à un temps tt = en approximant l’expression de x , xv et xa à l’aide d’un
développement en série de Taylor
( ) ( ) n
n
n
tn
xx =
=0 !
0,
( ) ( ) n
n
n
x
x tn
vv =
=0 !
0 et
( ) ( ) n
n
n
x
x tn
aa =
=0 !
0
où
( ) ( )0
d
d0
=
=
t
n
nn
xt
x , ( ) ( )
0d
d0
=
=
t
xn
nn
x vt
v et ( ) ( )
0d
d0
=
=
t
xn
nn
x at
a .
Réduisons l’expression de x à un polynôme du 5ième ordre
( ) ( ) ( ) ( ) ( ) ( )54)4(
3)3(
2)2()1(
24
0
6
0
2
0
1
0
1
0tOt
xt
xt
xt
xxx +++++=
que l’on peut réécrire sous la forme
( ) ( ) ( )54)4(3)3(2
000 024
10
6
1
2
1tOtxtxtatvxx xx +++++=
avec
( )0)0(
0 xx = , ( )0)1(
0 xvx = et ( )0)2(
0 xax = .
Réduisons l’expression de xv à un polynôme du 4ième ordre
( ) ( ) ( ) ( ) ( )43
)3(
2
)2()1()0(
6
0
2
0
1
0
1
0tOt
vt
vt
vvv xxxx
x ++++=
que l’on peut réécrire sous la forme
( ) ( ) ( )43)4(2)3(
00 06
10
2
1tOtxtxtavv xxx ++++=
avec
( )0)0(
0 xx vv = et ( ) ( )0
d
d 1
0
0 x
t
x
x vt
va ==
=

Note de cours rédigée par Simon Vézina Page 6
Ainsi que
( ) ( )00)2()3(
xvx = et ( ) ( )00)3()4(
xvx = puisque t
xvx
d
d= .
Réduisons l’expression de xa à un polynôme du 3ième ordre
( ) ( ) ( ) ( )32
)2()1()0(
2
0
1
0
1
0tOt
at
aaa xxx
x +++=
que l’on peut réécrire sous la forme
( ) ( ) ( )32)4()3(
0 02
10 tOtxtxaax +++=
avec
( )0)0(
0 xx aa =
Ainsi que
( ) ( )00)1()3(
xax = et ( ) ( )00)2()4(
xax = puisque 2
2
d
d
t
xa x = .
Dans les trois expressions x , xv et xa correspondant à une approximation des équations exactes, nous
retrouvons les fonctions ( )0)3(
x et ( )0)4(
x qui sont inconnues. Effectuons le changement de variable
( )0)3(
xA = et ( )0)4(
xB = afin d’alléger la notation ce qui nous donnes les expressions suivantes :
• 432
00024
1
6
1
2
1tBtAtatvxx xx ++++=
• 32
006
1
2
1tBtAtavv xxx +++=
• 2
02
1tBtAaa xx ++=
Établissons des conditions de raccordement à un temps 2/tt = et à un temps tt = à l’expression de
xa ce qui nous donne les équations suivantes :
( ) ( ) ( )2
0 2/2
12/2/ tBtAata xx ++=
( ) 2
08
1
2
12/ tBtAata xx ++=
( ) 2
0 482/8 tBtAata xx ++=
( ) 0
2 82/84 xx atatBtA −=+
( ) ( ) ( )2
02
1tBtAata xx ++=
( ) 2
02
1tBtAata xx ++=
( ) 2
0 222 tBtAata xx ++=
( ) 0
2 222 xx atatBtA −=+

Note de cours rédigée par Simon Vézina Page 7
Les conditions de raccordement proposent le système d’équations suivant qui sera à résoudre :
( ) 0
2 82/84 xx atatBtA −=+ (1)
( ) 0
2 222 xx atatBtA −=+ (2)
En effectuant (1) - (2), nous obtenons le résultat suivant :
( ) ( ) 00
22 2282/824 xxxx ataatatBtAtBtA −−−=+−+
( ) ( )tataatA xxx −+−= 22/862 0
( ) ( )tataatA xxx −+−= 2/43 0
En effectuant (1) – 2*(2), nous obtenons le résultat suivant :
( ) ( ) 00
22 22282/8224 xxxx ataatatBtAtBtA −−−=+−+
( ) ( )tataatB xxx −+−=− 42/84 0
2
( ) ( )tataatB xxx +−= 42/84 0
2
Avec les expressions de tA et 2tB , nous pouvons les remplacer dans x , xv et obtenir les équations
suivantes :
(Position) 432
00024
1
6
1
2
1tBtAtatvxx xx ++++=
( ) ( )( ) ( ) ( )( ) 2
0
2
0
2
000
42/8424
12/43
6
1
2
1
ttataattataa
tatvxx
xxxxxx
xx
+−+−+−+
++=
( ) ( ) ( ) ( ) 2
0
2
0
2
000
3
12/
3
2
3
1
2
1
3
12/
3
4
2
1
2
1
ttataattataa
tatvxx
xxxxxx
xx
+−+
−+−+
++=
( ) 2
000 2/3
2
3
1
2
1ttaatvxx xxx
+++= ■ (1)
(Vitesse) 32
006
1
2
1tBtAtavv xxx +++=
( ) ( )( ) ( ) ( )( ) ttataattataa
tavv
xxxxxx
xxx
+−+−+−+
+=
42/846
12/43
2
100
00

Note de cours rédigée par Simon Vézina Page 8
( ) ( ) ( ) ( ) ttataattataa
tavv
xxxxxx
xxx
+−+
−+−+
+=
6
42/
6
8
6
4
6
32/
6
12
6
900
00
( ) ( ) ttataavv xxxxx
+++=
6
12/
6
4
6
100
■ (2)
Remarque :
Dans cette notation, nous avons la correspondance
( )2/taa xmidx = et ( ) ( )taa xfx =2 .
Ces deux accélérations se doivent d’être évaluées avec des expressions x et xv développées en série de
Taylor au 3ième ordre ce qui donne des expressions comme
( )24
1
4
3100
taavv fxxxmidx
++= et ( ) ( ) taavv fxxxfx
++= 1002
2
1
2
1
dont la démonstration des coefficients est laissée à la discrétion du lecteur.
Comparaison des méthodes numériques avec la solution analytique
Voici trois problèmes ayant été solutionnés analytiquement (solution algébrique exacte) et
numériquement par les trois algorithmes précédents.
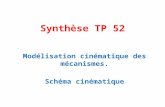
La chute libre :
Accélération :
gax −=
Solution analytique3 (MUA) :
2
002
1tatvxx xx ++=
Conclusion :
Les deux algorithme d’Euler
converge vers la solution analytique
lorsque l’accélération est constante et
l’écart diminue rapidement lorsqu’on
diminue l’intervalle de temps t .
Cinématique de la chute libre :
(x 0 = 50 m, v x 0 = 20 m/s, g = -9,8 m/s2, ∆t = 0,5 s)
-20
-10
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 7
t (s)
x (
m) Analytique
Euler
Euler inversé
3 La preuve de cette solution analytique est disponible au chapitre NYA – Chapitre 1.6.

Note de cours rédigée par Simon Vézina Page 9
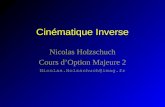
La chute avec résistance proportionnelle à vy :
Accélération :
yy vm
bga −−=
Solution analytique4 :
( )
−++−=
−Lv
gt
L
yLL eg
vvvtvyy 100
où bmgvL /=
Conclusion :
Les trois méthodes numériques se
comportent adéquatement lorsque la
vitesse limite est atteinte, mais la
méthode RK4 permet d’évaluer avec
beaucoup plus de précision le
comportement de la fonction lorsque
la vitesse de l’objet vy est supérieure à
la vitesse limite vL.
Cinématique de la chute avec résistance
proportionnelle à v y :
(y 0 = 0, v y 0 = 40 m/s, g = 10 m/s2, v L = 10 m/s, ∆t = 0,4 s)
-5
0
5
10
15
20
25
30
0 1 2 3 4 5t (s)
y (m
)
Euler
Euler inversé
RK4
Analytique
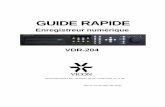
Système masse-ressort :
Accélération :
xa x
2
0−=
Solution analytique5 (MHS) :
( ) += tAx 0sin
où 2
0
2
02
0
xvxA +=
( )Ax /sin 0
1−=
Conclusion :
La méthode d’Euler diverge très
rapidement. La méthode d’Euler
inversé semble mieux adaptée à ce
type de problème.
Cinématique du système masse-ressort :
(x 0 = 0, v x 0 = 5 m/s, ω 0 = 3 rad/s, T = 2,094 s,
∆t = T / 70 = 0,03 s)
-4
-3
-2
-1
0
1
2
3
4
0 1 2 3 4 5 6 7 8t (s)x (
m)
Analytique
Euler
Euler inversé
Période d’oscillation : s1416,3/2 0 == T
4 La preuve de cette solution analytique est disponible au chapitre NYA – Chapitre 2.X1. 5 La preuve de cette solution analytique est disponible au chapitre NYC – Chapitre 1.1c.

Note de cours rédigée par Simon Vézina Page 10
En appliquant la méthode de RK4, on réalise que cette méthode, bien qu’elle soit plus précise que la
méthode d’Euler inversé pour la grande majorité des problèmes, commence à générer de l’atténuation
aux oscillations lorsque l’intervalle de temps t est supérieur à 1/20 de la période T d’oscillation
(usage de moins de 20 points pour estimer un mouvement sinusoïdale).
Cinématique du système masse-ressort :
(x 0 = 0, v x 0 = 5 m/s, ω 0 = 3 rad/s, T = 2,094 s, ∆t = T / 8 = 0,26 s)
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
0 5 10 15 20 25t (s)x
(m
)
Analytique
Euler inversé
RK4
Lorsque 4/Tt = , la méthode d’Euler inversé diverge en « explosant ». La méthode RK4 demeure
stable avec atténuation lorsque 3/20/ TtT et diverge en « explosant » lorsque 3/Tt . Cela
semble raisonnable, car il est difficile d’approximer une fonction sinusoïdale avec moins de 4 points
par cycle complet.
Cinématique du système masse-ressort :
(x 0 = 0, v x 0 = 5 m/s, ω 0 = 3 rad/s, T = 2,094 s, ∆t = T / 3 = 0,7 s)
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
0 5 10 15 20 25t (s)x
(m
)
Analytique
Euler inversé
RK4

Note de cours rédigée par Simon Vézina Page 11
Système masse-ressort amorti :
Accélération :
xx vm
bxa −−=
2
0
Solution analytique6 :
( ) +=−
teAxt
m
b
a2
0 sin
où
2
a
2
002
00
2
−
+=
xm
bv
xA
x
( )Ax /sin 0
1−=
2
2
0a2
−=
m
b
Cinématique du système masse-ressort amorti :
(x 0 = 5 m, v x 0 = 10 m/s, ω 0 = 3 rad/s, b = 2 kg m-1
, m = 2 kg
ω a = 2,96 rad/s, ∆t = T a / 5,3 = 0,4 s)
-15
-10
-5
0
5
10
15
20
0 1 2 3 4 5 6
t (s)
x(m
)
Euler inversé
RK4
Analytique
Période d’oscillation : aa /2 =T
Conclusion :
L’algorithme RK4 permet de maintenir les oscillations à la fréquence a adéquatement tout en préservant
une bonne estimation de l’amplitude et de la phase et ce malgré « l’atténuation naturelle » causée par
l’algorithme.
Stabilité des algorithmes en une dimension
Voici un petit bilan des conclusions obtenues par l’application des différentes méthodes d’intégrations
numériques à différents types de problèmes :
Algorithme Accélération7
n
x taa 0=
Accélération
( )xaa xx =
Accélération
( )xxx vaa =
Accélération
( )xxx vxaa ,=
Euler stable instable instable instable
Euler inversé stable stable instable instable
RK4 stable stable stable stable
6 La preuve de cette solution analytique est disponible au chapitre NYC – Chapitre 1.7. 7 Bien que l’exemple présenté dans ce document fait l’objet d’une accélération constante (n = 0), il est possible de démonter
numériquement que l’algorithme d’Euler converge adéquatement lorsque l’accélération dépend uniquement d’une fonction
polynomiale du temps.

Note de cours rédigée par Simon Vézina Page 12
Comparaison des méthodes numériques avec la solution analytique pour
un mouvement en deux dimensions
Les différents algorithmes présentés peuvent être implémentés vectoriellement. Il suffit de définir un
vecteur pour l’ensemble des paramètres :
Position Vitesse Accélération
kzjyixrx
++=→ kvjvivvv zyxx
++=→ kajaiaaa zyxx
++=→
Particule chargée dans un champ magnétique constant selon l’axe z :
Force magnétique :
BvqF
=m
Accélération :
y
z
x vm
qBa = et x
z
y vm
qBa =
Solution analytique8 :
( ) ( ) ( )( ) sinsin0 +−+= tRxtx
( ) ( ) ( )( ) coscos0 −−+= tRyty
où 2
0
2
0 yx vvv +=
zqB
mvR =
( )00 /arctan xy vv=
m
qBz=
Cinématique d'une particule chargée dans un
champ magnétique constant :
(x 0 = 0, y 0 = 12,5 m, v = 50 m/s, q = 2 C, m = 1 kg, B z = 2 T,
et Δt = T / 31,4 = 0,05 s)
-40
-30
-20
-10
0
10
20
30
-30x (m)
y(m
)
Euler
Euler inversé
RK4
Analytique
Période d’oscillation : zqBmT /2/2 ==
Conclusion :
L’algorithme RK4 peut converger vers la solution analytique seulement lorsqu’il y a un minimum de
30 points pour approximer la trajectoire circulaire (converge si 30/Tt ). Lorsqu’on utilise un pas
d’itération trop grand, l’algorithme RK4 tend à produire une trajectoire circulaire qui « entre » dans la
trajectoire analytique (trajectoire contraire à celles des algorithmes d’Euler qui augmentent la taille du
cercle).
8 La preuve de cette solution analytique est disponible au chapitre NYB – Chapitre 4.2d.

Note de cours rédigée par Simon Vézina Page 13

Note de cours rédigée par Simon Vézina Page 14

Note de cours rédigée par Simon Vézina Page 15

Note de cours rédigée par Simon Vézina Page 16