Chapitre 1 MCANIQUEE´ · Chapitre 1 MCANIQUEE´ 1.1. Lois de composition des vitesses et...
16
Chapitre 1 M ´ ECANIQUE 1.1. Lois de composition des vitesses et accélérations ★ On considère deux référentiels. Le premier, noté (R) et lié au repère (O,x,y,z), est qualifié d’absolu. Le second, noté (R ′ ) et lié au repère (O ′ ,x ′ ,y ′ ,z ′ ), est qualifié de relatif. On note #– v (M ) /R et #– v (M ) /R ′ , d’une part, et #– a (M ) /R et #– a (M ) /R ′ , d’autre part, les vitesses et accélérations d’un point matériel M dans ces deux référentiels. 1. Étude de la loi de composition des vitesses 1.a. Rappeler la loi de composition des vitesses pour le point M , entre (R) et (R ′ ), reliant les vitesses : absolue #– v a (M ) déf. = #– v (M ) /R ; relative #– v r (M ) déf. = #– v (M ) /R ′ ; d’entraînement en M du mouvement de (R ′ ) dans (R), notée #– v e (M ). Après avoir rappelé la définition du point coïncident M c , identifier le terme corres- pondant à la vitesse de M c dans (R). 1.b. On étudie le cas particulier où (R ′ ) est en translation (pas nécessairement uniforme ni rectiligne) par rapport à (R). On note #– v 0 = #– v (O ′ ) /R . Que devient #– v e (M ) dans ce cas ? Simplifier alors la loi de composition des vitesses et conclure. 1.c. On étudie maintenant le cas particulier où (R ′ ) est en rotation uniforme, de vitesse angulaire ω, autour de l’axe (Oz) fixe dans (R) et de vecteur unitaire #– u z . Expliciter #– v e (M ) en faisant intervenir le point H, projeté orthogonal du point M sur l’axe de rotation (Oz), ainsi que la base cylindrique ( #– u r , #– u θ , #– u z ) attachée à l’axe (Oz). 2. Étude de la loi de composition des accélérations 2.a. Rappeler la loi de composition des accélérations appliquée au point M entre les deux référentiels (R) et (R ′ ). Cette loi lie quatre termes que l’on prendra soin de nommer, mais que l’on ne cherchera pas à expliciter à ce stade. 2.b. On se place à nouveau dans le cas particulier de la question 1.b. On définit #– a 0 déf. = d #– v 0 dt = #– a (O ′ ) /R . Expliciter alors l’accélération de Coriolis ainsi que l’accé- lération d’entraînement. 2.c. Effectuer le même travail dans le cas particulier de la question 1.c. On fera notamment apparaître le vecteur #– HM et on utilisera le vecteur rotation #– Ω= ω #– u z ainsi que #– v r (M ). 3. Le référentiel (R) étant considéré comme galiléen, on cherche à établir l’expres- sion de la force d’inertie d’entraînement appliquée au point M de masse m dans le référentiel (R ′ ). 3.a. Expliciter la force d’inertie d’entraînement dans le cas correspondant à une translation pure de (R ′ ) dans (R) (cas de la question 1.b). © 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé
Transcript of Chapitre 1 MCANIQUEE´ · Chapitre 1 MCANIQUEE´ 1.1. Lois de composition des vitesses et...

Chapitre 1
MECANIQUE
1.1. Lois de composition des vitesses et accélérations
On considère deux référentiels.
Le premier, noté (R) et lié au repère (O,x,y,z), est qualifié d’absolu. Le second, noté (R′) et lié au repère (O′,x′,y′,z′), est qualifié de relatif.
On note #–v (M)/R et #–v (M)/R′ , d’une part, et #–a (M)/R et #–a (M)/R′ , d’autre part,les vitesses et accélérations d’un point matériel M dans ces deux référentiels.
1. Étude de la loi de composition des vitesses
1.a. Rappeler la loi de composition des vitesses pour le point M , entre (R) et (R′),reliant les vitesses :
absolue #–v a(M)déf.= #–v (M)/R ;
relative #–v r(M)déf.= #–v (M)/R′ ;
d’entraînement en M du mouvement de (R′) dans (R), notée #–v e(M).
Après avoir rappelé la définition du point coïncident Mc, identifier le terme corres-pondant à la vitesse de Mc dans (R).
1.b. On étudie le cas particulier où (R′) est en translation (pas nécessairementuniforme ni rectiligne) par rapport à (R). On note #–v 0 = #–v (O′)/R. Que devient#–v e(M) dans ce cas ? Simplifier alors la loi de composition des vitesses et conclure.
1.c. On étudie maintenant le cas particulier où (R′) est en rotation uniforme, devitesse angulaire ω, autour de l’axe (Oz) fixe dans (R) et de vecteur unitaire #–u z.Expliciter #–v e(M) en faisant intervenir le point H, projeté orthogonal du point Msur l’axe de rotation (Oz), ainsi que la base cylindrique ( #–u r,
#–u θ,#–u z) attachée à
l’axe (Oz).
2. Étude de la loi de composition des accélérations
2.a. Rappeler la loi de composition des accélérations appliquée au point M entreles deux référentiels (R) et (R′). Cette loi lie quatre termes que l’on prendra soinde nommer, mais que l’on ne cherchera pas à expliciter à ce stade.
2.b. On se place à nouveau dans le cas particulier de la question 1.b. On définit#–a 0
déf.= d #–v 0
dt = #–a (O′)/R. Expliciter alors l’accélération de Coriolis ainsi que l’accé-lération d’entraînement.
2.c. Effectuer le même travail dans le cas particulier de la question 1.c. On feranotamment apparaître le vecteur
# –
HM et on utilisera le vecteur rotation#–
Ω = ω #–u z
ainsi que #–v r(M).
3. Le référentiel (R) étant considéré comme galiléen, on cherche à établir l’expres-sion de la force d’inertie d’entraînement appliquée au point M de masse m dans leréférentiel (R′).
3.a. Expliciter la force d’inertie d’entraînement dans le cas correspondant à unetranslation pure de (R′) dans (R) (cas de la question 1.b).
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

2C
hapit
re1.
Méc
an
iqu
e
3.b. Expliciter la force d’inertie d’entraînement dans le cas correspondant à unerotation pure de (R′) dans (R) (cas de la question 1.c).
Corrigé
1.a. La loi de composition des vitesses entre (R) et (R′) est
#–v a(M) = #–v r(M) + #–v e(M) .
Le point coïncident Mc est le point dont la vitesse est nulle dans (R′), c’est-à-dire#–v r(Mc) =
#–
0 , et situé au même endroit que le point M à chaque instant, que cedernier se déplace ou non.
Attention Différence entre M et son point coïncident Mc
Il ne faut pas confondre M et Mc, son point coïncident : M est un point matérielalors que Mc n’est que le point géométrique confondu avec M à un instant donné.De ce fait, si
# –
OM =# –
OM c à chaque instant, dans tout référentiel où M se déplace,#–v (M) 6= #–v (Mc) .
En appliquant la loi de composition des vitesses à Mc et en considérant que M est
confondu avec Mc, on obtient #–v a(Mc) =#–v e(Mc) ⇒ #–v a(Mc) =
#–v e(M) , car lavitesse d’entraînement ne dépend que du lieu où on la calcule. La vitesse du pointcoïncident dans (R) est donc la vitesse d’entraînement en M du fait du mouvementrelatif de (R′) par rapport à (R).
1.b. Dans le cas d’une translation de (R′) dans (R), la vitesse dans (R) de tout pointfixe dans (R′) est la même et est identique, par exemple, à #–v (O′)/R. On en déduitque le champ des vitesses d’entraînement est uniforme,
#–v e(M) = #–v 0 ⇒ #–v a(M) = #–v r(M) + #–v 0 .
1.c. Dans le cas d’une rotation uniforme autour d’un axe fixe dans (R), le pointcoïncident Mc décrit un mouvement circulaire uniforme de centre H et de rayon r =HM . La vitesse d’entraînement en M est donc donnée par #–v e(M) = ω #–u z ∧ # –
OM ,soit, puisque
# –
OH est colinéaire à #–u z, #–v e(M) = ω #–u z ∧ (# –
OH +# –
HM) = ω #–u z ∧# –
HM .
En définissant le vecteur rotation#–
Ω = ω #–u z ou en remarquant que# –
HM = r #–u r, onpeut écrire #–v e(M) sous les deux formes
#–v e(M) =#–
Ω ∧ # –
HM = rω #–u θ .
Attention Non-uniformité de #–v e(M)
Contrairement au cas d’un mouvement de translation entre (R) et (R′), #–v e(M)n’est pas uniforme dans le cas d’un mouvement de rotation entre ces deuxréférentiels.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

3
Exer
cice
1.2
.Pen
du
lesi
mple
dan
su
nasc
ense
ur
2.a. La loi de composition des accélérations entre (R) et (R′) est
#–a a(M)︸ ︷︷ ︸
accélération absolue
= #–a r(M)︸ ︷︷ ︸
accélération relative
+ #–a e(M)︸ ︷︷ ︸
accélération d’entraînement
+ #–a c(M)︸ ︷︷ ︸
accélération de Coriolis
.
2.b. Dans le cas d’une translation, pour laquelle#–
Ω =#–
0 , l’accélération de Coriolis,définie par #–a c(M) = 2
#–
Ω ∧ #–v r(M), est nulle. Tout comme le champ des vitessesd’entraînement, le champ des accélérations d’entraînement est uniforme et la loi decomposition des accélérations se réduit à
#–a a(M) = #–a r(M) + #–a 0 .
2.c. L’accélération d’entraînement se déduit du mouvement circulaire uniforme de Mc
par #–a e(M) = −rω2 #–u r, soit #–a e(M) = −ω2 # –
HM . L’accélération de Coriolis reste
sous sa forme générale #–a c(M) = 2#–
Ω ∧ #–v r(M) , car il faudrait avoir des informations
supplémentaires sur le mouvement de M dans (R′) pour expliciter davantage #–v r(M).
3. Quel que soit le mouvement de (R′) dans (R), la force d’inertie d’entraînement sur
un point de masse m s’écrit toujours#–
F ie = −m #–a e(M) .
3.a. Dans le cas d’une translation de (R′) dans (R), on obtient
#–
F ie = −m #–a 0 .
3.b. Dans le cas d’une rotation de (R′) dans (R), on obtient
#–
F ie = mω2 # –
HM .
Remarque La force étant dirigée radialement dans le sens qui l’éloigne de l’axe, onparle de force axifuge. Ce terme se retrouve dans le langage courant sous la forme de« force centrifuge », ce qui est cohérent si l’on considère que le centre évoqué ici estle point H, centre du cercle définissant le mouvement du point coïncident.
1.2. Pendule simple dans un ascenseur
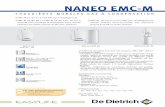
Un point M de masse m est attaché à l’extrémité d’un fil inextensible et sans massede longueur ℓ, suspendu au plafond d’une cabine d’ascenseur par une liaison pivotparfaite d’axe Oy (voir figure 1.2.1). Le pendule simple ainsi constitué peut oscillerlibrement dans le plan (xOz) autour de l’axe Oy. La cabine est en translation recti-ligne d’accélération constante #–a 0 = a0
#–u z dans le référentiel terrestre RT considérécomme galiléen. On note #–g l’accélération de la pesanteur et θ(t) l’angle entre laverticale et la direction du fil.
1. Écrire la loi du moment cinétique appliquée à M dans le référentiel R de lacabine et en déduire une équation différentielle vérifiée par θ(t).
2. Donner la pulsation ω ainsi que la période T des petites oscillations de ce penduleautour de sa position d’équilibre.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

4C
hapit
re1.
Méc
an
iqu
e
3. Comparer la période T à T0, la valeur qu’elle prend lorsque le référentiel de lacabine est galiléen. Interpréter le cas particulier où a0 = g. Que se passe-t-il sia0 > g ?
xy
z
#–g
M
O
θ
ℓ#–a 0 Fig. 1.2.1. Pendule simple dans un ascenseur.
Corrigé
1. Dans le référentiel de la cabine (non galiléen car en mouvement accéléré par rap-port au référentiel galiléen RT ), le point M est soumis aux forces suivantes dont ondétermine le moment par rapport à l’axe orienté Oy :
Méthode Moment d’une force par rapport à un axe
Pour calculer le moment scalaire d’une force#–
F par rapport à un axe orienté ∆,on détermine d’abord le bras de levier d qui est la distance entre la droite supportde la force et l’axe de rotation (voir figure 1.2.2), puis on écrit M∆(
#–
F ) = ±d×F .La détermination du signe dépend de la tendance qu’a cette force à favoriser unerotation dans le sens direct par rapport à l’axe orienté (signe « plus », cas de lafigure 1.2.2) ou dans le sens indirect (signe « moins »).
∆
d
#–
F
droite supportde
#–
FM
sens directautour de ∆
Fig. 1.2.2. Détermination du brasde levier.
son poids#–
P = mg #–u z, dont le bras de levier est ℓ sin θ, et qui tend à diminuerl’angle θ lorsque celui-ci est positif (et à l’augmenter lorsqu’il est négatif). On obtientalors MOy(
#–
P ) = −mgℓ sin θ ;
la tension du fil, colinéaire à celui-ci, dirigée vers le point O. Le bras de levier etle moment associé sont nuls ;
la force d’inertie de Coriolis, qui est nulle car la cabine a un mouvement de trans-lation dans RT ;
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

5
Exer
cice
1.2
.Pen
du
lesi
mple
dan
su
nasc
ense
ur
la force d’inertie d’entraînement#–
F i.e. = −m #–a e = −m #–a 0 dont le moment parrapport à l’axe Oy se calcule comme celui du poids, au signe près,
MOy(#–
F i.e.) = +ma0ℓ sin θ .
Remarque On peut regrouper les deux forces#–
P et#–
F i.e. pour former le poidsapparent dans la cabine
#–
P ∗ =#–
P +#–
F i.e. = m(g − a0)#–u z. Le pendule oscille alors
comme s’il était soumis à une seule force autre que la tension du fil, et dont le momentpar rapport à l’axe Oy est MOy(
#–
P ∗) = m(a0 − g)ℓ sin θ. Cette force est ici de mêmedirection que le poids mais d’intensité différente : en fonction de la valeur de a0,une personne présente dans la cabine aura l’impression que la gravité a localementaugmenté (P ∗ > P ) ou diminué (P ∗ < P ).
L’application de la loi du moment cinétique par rapport à l’axe orienté Oy donnedL∆
dt= MOy(
#–
P ) +MOy(#–
F i.e.), soit, après simplifications,
d2θ
dt2+g − a0ℓ
sin θ = 0 . (1.2.1)
2. Dans le cas des petites oscillations, θ ≪ 1 rad et donc sin θ ≈ θ. L’équation (1.2.1)devient alors d2θ
dt2 +g−a0
ℓ θ = 0 qui, lorsque a0 < g, se résout en θ(t) = A cos (ωt+ φ), où(A, φ), dont la détermination n’est pas demandée ici, dépend des conditions initiales
et où ω =
√
g − a0ℓ
. La période correspondante est T =2π
ω= 2π
√
ℓ
g − a0.
3. Le référentiel de la cabine est galiléen si celle-ci est en translation uniforme dans RT ,
soit lorsque a0 = 0. La période correspondante est T0 = 2π√
ℓg .
Si a0 < 0 (cas où la cabine monte en augmentant sa vitesse ou descend en freinant),T < T0. La pesanteur apparente est plus forte et les oscillations du pendule sont plusrapides que dans RT . Si 0 < a0 < g (cas où la cabine monte en freinant ou descend en augmentant savitesse), T > T0. La pesanteur apparente est plus faible et les oscillations sont pluslentes que dans RT . Si a0 = g (cas par exemple où la cabine est en chute libre suite à la rupture,heureusement très peu probable, du câble qui la retenait), T → +∞ : le pendules’immobilise même lorsque θ 6= 0. Toute valeur de θ est une position d’équilibre (onparle d’équilibre indifférent). Le point M tout comme une personne se trouvant dansla cabine se retrouvent en apesanteur : leur poids apparent est nul. Le cas a0 > g sort du cadre de l’étude, car θ = 0 n’est plus une position d’équilibreet le mouvement pour une situation initiale θ = 0 n’est plus oscillatoire autour decette valeur. Le point M « tombe » vers le haut car la pesanteur apparente a changéde sens. En revanche, un point M attaché à un fil au sol de la cabine suivrait des
oscillations de période T = 2πω = 2π
√ℓ
a0−g autour de la verticale ascendante.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

6C
hapit
re1.
Méc
an
iqu
e
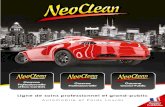
1.3. Pendule simple dans un véhicule accéléré
On étudie le mouvement d’un point M , de masse m, relativement au référentiel(R) du véhicule dans lequel il est attaché par un fil inextensible et sans masse delongueur ℓ. Le véhicule décrit un mouvement de translation d’accélération uniforme#–a 0 = a0
#–u x relativement au référentiel terrestre considéré comme galiléen. Le pointM est soumis à la force de pesanteur −mg #–u z et à la force de tension
#–
T du fil reliéà un point fixe O du véhicule (R) (voir figure 1.3.1).
x
y
z
m #–g
M
O
θ
ℓ#–a 0
+
#–
T
Fig. 1.3.1. Pendule simple dans un véhicule accéléré.
1. Exprimer, sur la base cylindro-polaire associée à l’angle d’oscillation θ du pen-dule, la loi de la quantité de mouvement dans (R).
2. En déduire l’équation différentielle vérifiée par θ. Quelles sont les positions d’équi-libre relatif de M ?
3. Étudier la stabilité de ces positions d’équilibre. Déterminer la pulsation Ω despetites oscillations autour des positions d’équilibre stables en fonction de g, a0, θ0
et ℓ, puis montrer que cette expression peut se simplifier en Ω2 =
√g2+a2
0
ℓ .Commenter le résultat obtenu.
Corrigé
1. L’accélération de Coriolis est nulle puisque#–
ΩR/RT=
#–
0 dans le mouvement detranslation de (R) dans (RT ). En revanche, l’accélération d’entraînement #–a 0 nonnulle fait apparaître une force d’inertie d’entrainement
#–
F i.e. = −m #–a 0. La loi de laquantité de mouvement appliquée à M dans le référentiel accéléré (R) s’écrit alors
m #–a (M)/R = −T #–u r −mg #–u z −ma0#–u x .
Deux projections dans la base cylindro-polaire ( #–u r,#–u θ) associée au mouvement du
pendule permettent d’écrire
−mℓθ2 = −T +mg cos θ +ma0 sin θ et mℓθ = −mg sin θ +ma0 cos θ .
2. La seconde égalité constitue l’équation du mouvement θ = − gℓ sin θ +
a0
ℓ cos θ ,
d’où on déduit, en prenant θ = 0, l’existence d’une position d’équilibre θ0 donnée par
g sin θ0 = a0 cos θ0 , soit encore tan θ0 =a0g
. (1.3.1)
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

7
Exer
cice
1.3
.Pen
du
lesi
mple
dan
su
nvé
hic
ule
acc
élér
é
3.
Méthode Stabilité d’un équilibre
Une position d’équilibre d’un mobile est dite stable si, lorsqu’on éloigne le mobilede cette position et qu’on l’abandonne sans vitesse initiale, il tend à retournerspontanément à cette position.Pour prouver qu’une position d’équilibre θeq est stable, on peut raisonner selonles étapes suivantes.
1. On pose θ(t) = θeq + ε(t), où |ε| est « petit ». La quantité ε constitue uneperturbation de l’équilibre.2. On établit alors l’équation différentielle vérifiée par ε(t). Comme ε ≪ 1, onpeut linéariser cette équation (développement limité à l’ordre 1 en ε).3. Deux cas se présentent.
Si sa solution ε(t) est oscillante, alors la position d’équilibre est stable, carθ(t) = θeq + ε(t) oscille autour de θeq. Le mobile passe son temps à tenter deretourner vers la position θeq. Si sa solution est divergente (ε→ ∞), la position d’équilibre est instable etle mobile quitte définitivement θeq suite à la perturbation.
On étudie les petits mouvements du pendule autour de θ0 en posant θ = θ0 + ε. Enremarquant que θ = ε, l’équation du mouvement devient
ε = −gℓ(sin θ0 cos ε+ cos θ0 sin ε) +
a0ℓ(cos θ0 cos ε− sin θ0 sin ε) .
En utilisant ε≪ 1 rad, soit cos ε ≈ 1 et sin ε ≈ ε, on la linéarise en
ε = −gℓ(sin θ0 + ε cos θ0) +
a0ℓ(cos θ0 − ε sin θ0) . (1.3.2)
En particularisant cette équation au cas ε(t) = 0, on obtient
0 = −gℓsin θ0 +
a0ℓ
cos θ0 . (1.3.3)
On reconnaît l’équation (1.3.1), qui correspond bien au cas d’équilibre ε = 0.
Méthode Suppression des termes constants
Pour faire disparaître les termes constants dans une équation différentielle dumouvement linéaire, on procède en trois étapes.
1. On écrit l’équation générale (linéaire) du mouvement.2. On la particularise au cas de l’équilibre.3. On fait la différence entre ces deux équations.
On soustrait (1.3.3) de (1.3.2), ce qui fait disparaître les termes constants,
ε+g cos θ0 + a0 sin θ0
ℓ︸ ︷︷ ︸
Ω2
ε = 0 . (1.3.4)
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

8C
hapit
re1.
Méc
an
iqu
e
Méthode Test pour une étude de stabilité
L’équation différentielle vérifiée par ε(t) doit admettre pour solution ε = 0, quitraduit le cas d’équilibre. Il est donc impératif que cette équation soit à secondmembre nul. Si les calculs sont corrects, les termes en θeq disparaissent effective-ment en utilisant la relation d’équilibre (1.3.3).
On vérifie que l’équation (1.3.4) est bien à second membre nul, ce qui autorise la
solution ε = 0. Commeg cos θ0 + a0 sin θ0
ℓ> 0, on peut poser que cette quantité
est égale à Ω2 > 0. L’équation (1.3.4) est donc celle d’un oscillateur harmonique,ε+Ω2 ε = 0. Ses solutions sont de la forme
ε(t) = A cos(Ωt+ φ) , avec Ω2 =g cos θ0 + a0 sin θ0
ℓ.
Le point M décrit donc de petites oscillations autour de θ0, ce qui montre le caractèrestable de la position d’équilibre étudiée.
Méthode Équation différentielle et critère de stabilité de Routh
Une équation différentielle linéaire d’ordre 1 ou 2 admet des solutions bornées siet seulement si tous les coefficients de son membre de gauche sont de même signe.L’équation est alors dite stable. Les exemples classiques d’équations stables, écritssous forme canonique, sont
ds
dt+
1
τs = . . . si τ > 0 et
d2s
dt2+ω0
Q
ds
dt+ ω2
0 s = . . . siω0
Q> 0 .
Les exemples classiques d’équations instables (à solutions non bornées) sont
ds
dt− 1
τs = . . . ou
d2s
dt2− ω0
Q
ds
dt+ ω2
0 s = . . . oud2s
dt2− ω2
0 s = . . .
Attention aux équations à un seul terme au membre de gauche (le critère decomparaison des signes n’a alors pas de sens). Par exemple, l’équation ds
dt = As’intègre en s(t) = At+B, qui tend vers l’infini si A 6= 0.
#–g ∗
− #–a 0
#–gθ0
Fig. 1.3.2. Pesanteur apparente. La projection de #–g sur#–g ∗ est g cos θ0. Celle de − #–a 0 est a0 sin θ0.
On peut définir la pesanteur apparente comme #–g ∗ = −g #–u z − a0#–u x (voir exercice
1.2 page 3), de norme g∗ =√
g2 + a20 (voir figure 1.3.2). On peut remarquer, d’aprèscette figure, que g cos θ0 + a0 sin θ0 = g∗. Ainsi
la pulsation des petites oscillations est Ω =
√
g∗
ℓ.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

9
Exer
cice
1.4
.M
ou
vem
ent
d’u
nan
nea
usu
ru
ne
tige
enro
tati
on
Le pendule prend une nouvelle position d’équilibre sous l’effet de son poids apparentet de la tension du fil, oblique, colinéaire à #–g ∗ (direction de la verticale apparente
dans le référentiel (R)). Il oscille à la pulsation Ω =√
g∗
ℓ , résultat classique pour lespetites oscillations d’un pendule simple.
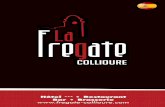
1.4. Mouvement d’un anneau sur une tige en rotation
Un petit anneau, modélisé par un point M , peut se déplacer sans frottement surune tige horizontale de longueur ℓ confondue avec l’axe (Ox) (voir figure 1.4.1).Un moteur, non représenté sur le schéma, maintient la tige en rotation de vitesseangulaire constante ω = θ et d’axe (Oz) dans le référentiel terrestre (RT ), supposégaliléen. On appelle (R) le référentiel de la tige, dans lequel #–v est la vitesse de Mà l’instant t. On pose x(t) = OM . À l’instant t = 0, on lâche l’anneau à partir d’unpoint A tel que xA = ℓ
2 , sans vitesse initiale dans le référentiel (R) de la tige, soit#–v A =
#–
0 .
xy
z
#–g
M
O
θ
ℓB
X
AFig. 1.4.1. Anneau surune tige en rotation (vuede dessus).
1. Discuter qualitativement de l’allure de la trajectoire de M dans (R), puisdans (RT ).
2. En appliquant la loi de l’énergie cinétique, déterminer la vitesse #–v B dans (R)lorsqu’il arrive au point B (extrémité de la tige).
3. En déduire sa vitesse #–v ′B au même point dans le référentiel terrestre (RT ).
4. À l’aide de la loi de l’énergie cinétique, en déduire le travail Wtige fourni par laréaction de la tige à l’anneau entre A et B dans le référentiel (RT ). Commenter lerésultat.
Corrigé
1. Le point M se déplace sur la tige, qui est immobile dans (R). Sa trajectoire dans(R) est donc une portion de la droite confondue avec la tige (mouvement rectiligne).Pour visualiser la trajectoire de M dans (RT ), il faut tenir compte du mouvement derotation de la tige dans (RT ) : la trajectoire de M a l’allure d’une spirale.
2. Appliquer la loi de l’énergie cinétique nécessite d’exprimer les travaux des forcesmises en jeu.
Méthode Travail d’une force
Pour déterminer le travail WA→B(#–
F ) d’une force#–
F entre deux points A et B,plusieurs méthodes sont possibles.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

10C
hapit
re1.
Méc
an
iqu
e
Méthode (suite)
On peut effectuer une intégration directe sur le chemin suivi par M entre A etB en écrivant WA→B =
´ B
A
#–
F · #–
dℓ. Le calcul est très simple dans deux cas : celuioù
#–
F est normale au déplacement en tout point de la trajectoire, qui conduit àWA→B = 0 et celui où
#–
F est constante, qui donne WA→B =#–
F ·´ B
A
#–
dℓ =#–
F · # –
AB,en général facile à calculer. On peut aussi utiliser l’énergie potentielle Ep associée à cette force si celle-ciest conservative. Par construction, dEp = −δW. Cela s’intègre selon
ˆ B
A
δW =
ˆ Ep(B)
Ep(A)
− dEp ⇒ WA→B = Ep(A)− Ep(B) .
À cause du signe « moins » dans la définition de l’énergie potentielle, il faut faireattention à l’ordre des points A et B dans la relation précédente : le travail fournipar la force est l’opposé de la variation d’énergie potentielle.
Le référentiel (R) est non galiléen car il est en rotation dans le référentiel (RT ). Dansce référentiel, le point M est soumis à :
son poids#–
P = −mg #–u z dont le travail est nul,#–
P étant normal à# –
AB ; la réaction de la tige
#–
T , normale à celle-ci du fait de l’absence de frottements entrela tige et M , et par conséquent normale au déplacement : son travail est donc nul ;
Attention Direction de#–
T
Le fait que#–
T soit normale à la tige ne signifie pas pour autant qu’elle est verticale :elle s’écrit
#–
T = Tx#–u x + Ty
#–u y.
la force d’inertie de Coriolis, dont le travail est toujours nul (voir encadré« Méthode » page 14) ; la force d’inertie d’entraînement qui, dans le cas d’une rotation uniforme autourd’un axe fixe, se limite à la force axifuge
#–
F ie = mω2 # –
HM , où H est le projeté ortho-gonal de M sur l’axe (ici, O et H sont identiques). L’expression de cette force a étéétablie à l’exercice 1.1 page 1.
Méthode Travail et énergie potentielle de la force axifuge
Le travail élémentaire de#–
F ie = mω2 # –
HM s’écrit
δWie =#–
F ie · d(# –
OM) ⇒ δWie = mω2 # –
HM · d( # –
OH +# –
HM) .
Comme# –
HM · d( # –
OH) = 0, cela se simplifie en δWie = mω2 # –
HM · d( # –
HM). Enremarquant que
# –
HM · d( # –
HM) = d( 12HM2), on peut écrire δWie = −dEpie, où
Epie est l’énergie potentielle,
Epie = −1
2mω2HM2 .
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

11
Exer
cice
1.4
.M
ou
vem
ent
d’u
nan
nea
usu
ru
ne
tige
enro
tati
on
Méthode (suite)
La force d’inertie axifuge est donc une force conservative. Son travail entre deuxpoints A et B s’écrit comme l’opposé de la variation d’énergie potentielle dontelle dérive,
Wie =1
2mω2(HBB
2 −HAA2) .
Les termes HAA et HBB sont simplement les distances initiale et finale du pointM à l’axe (ce n’est pas le même point H dans les deux cas, d’où la précision desindices).
En appliquant directement le résultat de l’encadré « Méthode » ci-avant, on obtientWie =
12mω
2[ℓ2 − ( ℓ2 )
2].
La loi de l’énergie cinétique appliquée àM entre les positions A et B dans le référentielde la tige s’écrit
Ec(B)− Ec(A) = WA→B(ext →M) ⇒ 1
2mv2B − 1
2mv2A︸ ︷︷ ︸
=0
= Wie
⇒ 1
2mv2B =
1
2mω2 3
4ℓ2 ⇒ #–v B =
√3
2ℓω #–u x .
3. Pour obtenir la vitesse de M au même instant dans le référentiel terrestre (RT ),on utilise la loi de composition des vitesses,
#–v ′B
︸ ︷︷ ︸
vitesse absolue
= #–v B︸ ︷︷ ︸
vitesse relative
+ #–v (B ∈ tige/RT )︸ ︷︷ ︸
vitesse d’entraînement
⇒ #–v ′B = ℓω
(√3
2#–u x + #–u y
)
.
Méthode Factorisation d’un résultat
Il est recommandé de factoriser le plus grand nombre de termes dans le résultatfinal (ici, le terme ℓω), car cela présente les avantages suivants.
S’il s’agit d’un vecteur, le calcul de sa norme est plus simple. Par exemple,
écrire || #–v ′B || = ℓω
√34 + 1 = ℓω
√72 est plus simple et rapide que d’écrire
|| #–v ′B || =
√
(ℓω√34 )2 + (ℓω)2 pour ne simplifier qu’ensuite.
La vérification de l’homogénéité de la relation est plus aisée. On voit immé-diatement que le terme ℓω est homogène à une vitesse, les coefficients précédantles vecteurs de base étant sans dimension.
4. Le référentiel (RT ) étant galiléen, il n’y a pas de forces d’inertie à prendre encompte. Le bilan des forces appliquées à M se réduit donc au poids, dont le travailest toujours nul (déplacement horizontal de M), et à
#–
T . En revanche, le travail de#–
Tn’est plus nul, même en l’absence de frottement, car la vitesse de M dans (RT ) n’est
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

12C
hapit
re1.
Méc
an
iqu
e
pas orthogonale à#–
T . Dans (RT ), la vitesse de M a une composante selon #–u y, toutcomme
#–
T . La puissance P(#–
T ) =#–
T · #–v (M/RT ) n’est donc pas nulle.
Attention Le travail d’une force dépend du référentiel
Le travail δW =#–
F · #–
dℓM d’une force d’interaction dépend en général du référentield’étude. En effet, la force
#–
F est invariante par changement de référentiel mais ledéplacement
#–
dℓM de son point d’application ne l’est pas.Il en est de même pour le travail d’une force d’inertie, qui, de plus, n’est en généralpas invariante par changement de référentiel.
La loi de l’énergie cinétique appliquée à M dans (RT ) entre A et B s’écrit
1
2m(v′B
2 − v′A2) = Wtige ,
soit encore, avec v′A = 12ℓω et v′B =
√72 ℓω calculés précédemment, Wtige =
34m(ℓω)2 .
Remarque On peut interpréter l’existence d’une composante selon #–u y de#–
T commela conséquence de la force de Coriolis dans (R), donnée par
#–
F ic = −2mω #–u z ∧ v #–u x = 2mωv #–u y .
En effet, dans ce référentiel, la loi de la quantité de mouvement prévoit que le dépla-cement rectiligne de M selon #–u x ne peut se faire que si les forces dans la direction#–u y se compensent.
1.5. Satellite dans la soute d’une navette
La Terre est assimilée à un astre à symétrie sphérique, de rayon R, de centre C,origine d’un référentiel supposé galiléen (G). On appelle g0 l’accélération de lapesanteur au niveau du sol.
1. Une navette spatiale décrit une orbite circulaire de rayon r autour du centre dela Terre. Déterminer la pulsation temporelle ω0 de son mouvement.
2. Il est d’usage de dire qu’un objet situé dans la soute se trouve en impesanteur.Que signifie cette expression ?
3. Soit (N) le référentiel lié à la navette, dont l’origine A est le centre de massede cette navette. Il est en rotation de centre C par rapport à (G), de sorte que lanavette garde toujours la même orientation par rapport à la Terre. On utilisera lesaxes ( #–u r,
#–u θ,#–u z), où #–u r est radial et #–u θ colinéaire à la trajectoire circulaire de la
navette (voir figure 1.5.1). Les trois axes ( #–u r,#–u θ,
#–u z) sont fixes dans (N).Un satellite situé dans la soute est assimilé à un point matériel P de masse m,repéré par
# –
AP = x #–u r + y #–u θ + z #–u z ou par# –
CP = r #–u r +# –
AP .Quelles sont les forces qui s’exercent, dans (N), sur le point matériel P ? Donnerleur expression vectorielle.
4. Exprimer l’énergie potentielle Ep du point matériel P , dans (N), en fonction dem, ω0, r, x, y et z.
5. On peut effectuer un développement limité de Ep au second ordre en xr , y
r et zr au
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

13
Exer
cice
1.5
.S
ate
llit
edan
sla
sou
ted’u
ne
nave
tte
voisinage du point A. On obtient Ep ≃ −mω20
2
(3x2 − z2
), à une constante additive
près. Représenter l’allure des fonctions x 7→ Ep(x,z = 0) et z 7→ Ep(x = 0,z). Laposition x = 0, y = 0, z = 0 au centre de gravité de la soute de la navette est-elleune position d’équilibre ? Est-elle a priori stable ?
6. Dans le cadre de l’approximation à l’ordre 2 de la question précédente, établirles équations du mouvement d’une masse ponctuelle au voisinage du point A, dansle référentiel (N). À partir de ces équations, conclure sur la stabilité de la positiond’équilibre au point A.
b
b
b
C
P
A
#–u r
#–u θ
Fig. 1.5.1. Impesanteur. Le point A repré-sente le centre de masse de la navette et P unobjet placé dans sa soute.
Corrigé
1. On note MT la masse de la Terre et MN celle de la navette. Dans le référentielgaliléen (G), la navette est uniquement soumise à la force de gravitation terrestre#–
F = −G MTMN
r2#–u r. Comme elle est en mouvement circulaire uniforme, son accé-
lération est centripète et vaut #–a = −ω20r
#–u r. La loi de la quantité de mouvementappliquée à la navette dans le référentiel (G) s’écrit
#–
F =MN#–a ⇒ GMTMN
r2=MNω
20r ⇒ ω0 =
√
GMT
r3.
D’autre part, le champ de pesanteur au sol vaut g0 = GMT
R2 , donc
ω0 =
√
g0R2
r3. (1.5.1)
2. Dans le référentiel non galiléen (N) de la navette, un objet est soumis à des forcesd’inertie. Tant que l’objet est immobile dans (N), la force de Coriolis −2m #–ω 0∧ #–v estnulle car #–v =
#–
0 . La seule force d’inertie restante est la force axifuge,mω20r
#–u r. L’objetest aussi soumis à la gravitation terrestre, −mGMT
r2#–u r = −m g0R
2
r2#–u r. La résultante
de ces deux actions est nulle en utilisant l’équation (1.5.1),
mω20r
#–u r −mg0R
2
r2#–u r =
#–
0 .
En toute rigueur, les deux dernières égalités ne sont nulles que si l’objet est exactementau point A, car la distance r de l’équation (1.5.1) est r = CA. Ainsi, dans le référentielde la navette, tout se passe comme si l’objet situé en A n’était soumis à aucune force :il reste immobile à l’endroit où il est abandonné sans vitesse initiale. On dit qu’il esten impesanteur. Dans la vie courante, on parle souvent d’apesanteur pour décrire lesastronautes qui semblent flotter dans la navette. Cependant, ce terme ne devrait être
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

14C
hapit
re1.
Méc
an
iqu
e
utilisé que lorsque l’objet n’est réellement soumis à aucune attraction (infiniment loinde tout astre).
3. Dans le référentiel (N), le point matériel P est soumis à :
la force d’inertie d’entraînement, donnée par#–
f ie = mω20
# –
HP , où H est le projetéde P sur l’axe de rotation de la Terre. Avec
# –
CH = z #–u z, on écrit
# –
HP =# –
CH − # –
CP = ((r + x) #–u r + y #–u θ) ⇒ #–
f ie = mω20 ((r + x) #–u r + y #–u θ) ;
la force de pesanteur dirigée selon − # –
CP , de norme g0R2
CP 2 ,
#–
FG = −m g0R2
((r + x)2 + y2 + z2)3/2
((r + x) #–u r + y #–u θ + z #–u z) ;
la force de Coriolis#–
f ic = −2m#–
Ω ∧ #–v r avec#–
Ω = ω0#–u z et #–v r = x #–u r + y #–u θ + z #–u z,
#–
f ic = −2mω0 (−y #–u r + x #–u θ) . (1.5.2)
4.
Méthode Force d’inertie de Coriolis
La puissance transmise par la force de Coriolis à son point d’application s’écrit
P =#–
f ic · #–v r = −2m(#–
Ω ∧ #–v r) · #–v r = 0 .
Le travail et la puissance de la force de Coriolis sont donc toujours nuls.
Seules les forces gravitationnelle et d’inertie d’entraînement travaillent.
La force gravitationnelle dérive de l’énergie potentielle −GMmr = −m g0R
2
r , soit
Ep1 = − mg0R2
[(x+ r)2 + y2 + z2]1/2
.
La force d’inertie d’entraînement dérive aussi d’une énergie potentielle puisque sontravail δWie =
#–
f ie · d #–r = mω20 [(x+ r) dx+ y dy] peut être écrit δWie = −dEp2, avec
Ep2 = −1
2mω2
0
[(r + x)2 + y2
].
À l’aide de l’équation (1.5.1), on remarque que g0R2 = ω20r
3. Cela permet une facto-risation des deux termes de l’énergie potentielle totale Ep = Ep1 + Ep2,
Ep = −mω20
[
(r + x)2 + y2
2+
r3√
(r + x)2 + y2 + z2
]
.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

15
Exer
cice
1.5
.S
ate
llit
edan
sla
sou
ted’u
ne
nave
tte
5.
x
Ep(x,z = 0)
z
Ep(x = 0,z)
Fig. 1.5.2. Énergie potentielle totale. Vue en coupe dans deux plans de la surface repré-sentative de Ep(x,z).
Méthode Stabilité d’une position d’équilibre
Pour un problème conservatif (dans lequel toutes les forces dérivent d’une énergiepotentielle), une position d’équilibre correspond à un extremum d’énergie poten-tielle. L’équilibre est :
stable si c’est un minimum de Ep ; instable sinon.
La position x = y = z = 0 est un extremum de l’énergie potentielle : c’est doncune position d’équilibre. Cet extremum est un minimum de Ep(x,z = 0), mais unmaximum de Ep(x = 0,z) : il ne s’agit donc pas d’un minimum de Ep(x,z). A priori,la position d’équilibre est donc instable. Cependant, la force de Coriolis intervientdans l’éventuel mouvement de P . Comme cette force ne dérive pas d’une énergie po-tentielle, on ne se trouve pas exactement dans le domaine d’application de l’encadré« Méthode » ci-avant (pour lequel toutes les forces intervenant doivent dériver d’uneénergie potentielle). L’intérêt de la question 6 est d’étudier la stabilité de la posi-tion d’équilibre par une étude dynamique complète, comme expliqué dans l’encadré« Méthode » de la page 7 (seule technique probante).
6. À partir de l’énergie potentielle donnée, on peut trouver la résultante appro-chée des deux forces de gravitation et d’inertie d’entraînement subies par P dans leréférentiel (N),
#–
FG +#–
f ie = − # –grad Ep ≃ mω20
2(6x #–u x − 2z #–u z) .
Par ailleurs, la force d’inertie de Coriolis est déjà donnée par la relation (1.5.2). Sonexpression est simple et n’a pas besoin d’être approchée. La loi de la quantité demouvement appliquée à P s’écrit#–
FG+#–
f ie+#–
f ic = m #–a ⇒ [3ω20x+2ω0y]
#–u r−2ω0x#–u θ−ω2
0z#–u z = x #–u r+y
#–u θ+z#–u z .
En la projetant sur les trois axes, on obtient trois relations,
−3ω20 x+ 2ω0 y = x (1.5.3)
−2ω0 x = y (1.5.4)
z + ω20 z = 0 . (1.5.5)
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé

16C
hapit
re1.
Méc
an
iqu
e
D’après le critère de stabilité de Routh (voir encadré « Méthode » page 8), l’équa-
tion (1.5.5) montre que z(t) est bornée , ce qui est conforme au fait minimum d’éner-
gie potentielle de z 7→ Ep(x = 0,z). Il y a donc bien stabilité de l’équilibre vis-à-visdes perturbations selon la direction z. La résolution de l’équation (1.5.5) conduit à
z(t) = A cos(ω0t+ φ) ,
où A et φ sont des constantes dépendant des conditions initiales. Cette forme confirmel’aspect borné de z(t).Les équations (1.5.3) et (1.5.4) sont couplées, mais linéaires. On peut les découplerfacilement. Par exemple, en intégrant (1.5.4) par rapport au temps, y = −2ω0x+B,où la constante B dépend des conditions initiales. On remplace y dans (1.5.3) pourobtenir
x+ 7ω20 x = 2ω0B .
D’après le critère de stabilité de Routh, x(t) reste borné . On peut d’ailleurs confir-
mer cette assertion en résolvant l’équation, x(t) = C cos(√7ω0t + ϕ) + 2
7ω0B, où les
constantes C et ϕ dépendent des conditions initiales. Enfin, on déduit y de x via larelation
y = −2ω0x+B ⇒ y = −2ω0C cos(√7ω0t+ ϕ) +
3
7B ,
qui s’intègre en
y(t) = −2
7C sin(
√7ω0t+ ϕ)
︸ ︷︷ ︸
borné
+3
7B t
︸ ︷︷ ︸
→∞
+D . (1.5.6)
La coordonnée y contient un terme tendant vers l’infini . Ainsi, à partir d’une per-turbation de la position d’équilibre, le point P effectue des oscillations accompagnéesd’une lente dérive dans la direction #–u θ (terme linéaire en temps).
Le point (0,0,0) est donc une position d’équilibre instable .
Attention Validité des solutions
Tous les calculs de cette question sont valables tant que le développement limité àl’ordre 2 de l’énergie potentielle est une approximation acceptable. Entre autres,cela suppose y
r ≪ 1. Par conséquent, la relation (1.5.6) n’est pas indéfinimentvalable à cause du terme qui tend vers l’infini. Cependant, elle suffit à prouverque y(t) n’oscille pas autour de zéro, c’est-à-dire qu’il y a instabilité.
Une instabilité avait été prévue à la question 4, mais elle concernait les perturba-tions selon x. La présente question montre que l’instabilité est en fait selon y. Cesdeux conclusions sont complètement différentes. La première repose sur une utilisationerronée de l’énergie potentielle. Seule la seconde méthode est fiable.
© 2014 Pearson France – Physique PC-PC* – Vincent Renvoizé