Cast3m Prise en main
71
PRISE EN MAIN DE CASTEM 2000 PAR L'EXEMPLE Avril 1996 J.S. Fleuret - CEA Saclay / DRN / DMT / SEMT / LAMS
-
Upload
justin-dirrenberger -
Category
Documents
-
view
323 -
download
7
description
Cast3m tutorials.
Transcript of Cast3m Prise en main

PRISE EN MAIN
DE
CASTEM 2000
PAR L'EXEMPLE
Avril 1996
J.S. Fleuret - CEA Saclay / DRN / DMT / SEMT / LAMS

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
1
SOMMAIRE
Avant - Propos_____________________________________________________________3
I. Généralités______________________________________________________________4
I.1. Présentation générale_________________________________________________________4I.1.1. Présentation de Castem 2000________________________________________________________4I.1.2. Le langage de Castem 2000 : Gibiane_________________________________________________4I.1.3. Type d’objet et principaux opérateurs_________________________________________________5I.1.4. Principaux opérateurs______________________________________________________________7I.1.5. Système d’unités__________________________________________________________________ 8I.1.6. Analyse par éléments finis__________________________________________________________8I.1.7. Problèmes pouvant être résolus par CASTEM __________________________________________8I.1.8. Liste des ouvrages de présentation ___________________________________________________8
I.2. Maillage ____________________________________________________________________9I.2.1. Généralités______________________________________________________________________9I.2.2. Proposition de solution pour un maillage régulier________________________________________9I.2.3. Analyse de la solution____________________________________________________________10I.2.4. Maillage avec densité variable______________________________________________________12I.2.5. Maillage avec densité variable et nombre d’états constant_________________________________ 14I.2.6. Maillage avec élimination de noeuds_________________________________________________16
II. Calculs mécaniques_____________________________________________________19
II.1. Premier calcul mécanique linéaire ____________________________________________19II.1.1. Objectif du calcul_______________________________________________________________19II.1.2. Proposition de solution___________________________________________________________19II.1.3. Analyse de la solution____________________________________________________________20
II.2. Calcul mécanique avec force de pression et de poids propre_______________________24II.2.1. Objectif du calcul_______________________________________________________________24II.2.2. Proposition de solution___________________________________________________________24II.2.3. Analyse de la solution proposée____________________________________________________25
II.3. Analyse modale____________________________________________________________30II.3.1. Objectif de l’étude______________________________________________________________30II.3.2. Proposition de solution___________________________________________________________30II.3.3. Analyse de la solution proposée____________________________________________________32
III. Calculs thermo-mécaniques______________________________________________36
III.1. Généralités concernant les calculs thermiques__________________________________36
III.2. Exemple de calcul thermique________________________________________________36III.2.1. Présentation de l’exemple________________________________________________________36III.2.2. Proposition de solution__________________________________________________________37III.2.3. Analyse de la solution proposée___________________________________________________38
III.3. Exemple de calcul thermo-mécanique_________________________________________42III.3.1. Présentation de l'exemple________________________________________________________42III.3.2. Proposition de solution__________________________________________________________42III.3.3. Analyse de la solution proposée___________________________________________________45

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
2
IV. Calculs non linéaires____________________________________________________51
IV.1. Généralités concernant les calculs non linéaires_________________________________51
IV.2. Calcul élasto-plastique______________________________________________________51IV.2.1. Objectif du calcul______________________________________________________________51IV.2.2. Proposition de solution__________________________________________________________52IV.2.3. Analyse de la solution proposée___________________________________________________53IV.2.4. Proposition de solution pour le post-traitement________________________________________56IV.2.5. Analyse de la solution de post-traitement proposée____________________________________ 57
LEXIQUE ________________________________________________________________60Annexes
Annexe 1 : Liste des objets manipulés par CASTEM 2000Annexe 2 : Liste des principaux opérateurs

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
3
Avant - Propo s
L'objet de ce document est de permettre à un utili sateur débutant de se familiariser
avec les concepts généraux de CASTEM 2000. Pour cela, nous avons choisi de nous appuyer
sur des exemples simples que nous analyserons ligne par ligne. L'utili sation d'exemples nous
parait intéressante pour ill ustrer de manière concrète la manipulation d'objets parfois un peu
abstraits. Le choix des exemples traités a été effectué dans l'optique de balayer un panel aussi
large que possible des possibilit és de CASTEM tout en restant dans des cas simples pouvant
se comprendre rapidement.
Nous conseill ons au lecteur de prendre ce document par le début, sans sauter de
chapitre, car les notions étudiées sur les premiers exemples ne sont pas redétaill ées par la
suite. Nous incitons également le lecteur à se reporter aussi souvent que possible à la
documentation sur les commandes que nous allons utili ser. Notons que la documentation sur
un opérateur ou une directive peut s'obtenir en utili sant la directive INFO suivie du nom de
l’opérateur ou de la directive.
Bonne lecture...

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
4
I. Générali tés
I.1. Présentation g énérale
I.1.1. Présentation de Castem 2000
Castem 2000 est un logiciel de calcul de structures par la méthode des éléments finis etplus généralement de résolution d’équations aux dérivées partielles par la méthode deséléments finis. Il a été développé au Département de Mécanique et Technologie (DMT) duCommissariat à l’Energie Atomique (CEA). La principale particularité de Castem 2000, estd’être extrêmement adaptable aux multiples applications propres à chaque utilisateur.
I.1.2. Le langage de Castem 2000 : Gibiane
Gibiane est le langage qui permet de communiquer avec le programme. La syntaxe estbasée sur l’utili sation de directives, d'opérateurs et de procédures qui s’appliquent à desopérandes.
Dans le premier cas la syntaxe est : DIRECTIVE OPERANDES.Par exemple dans TRACE MAILLAGE ; TRACE est la directive de traçage et MAILLAGEest l’opérande que l’on veut visualiser.
Dans le second cas, la syntaxe est : RESULTATS = OPERATEUR OPERANDES.Par exemple dans LIGNE = DROITE P1 P2 ; LIGNE sera l’objet construit en reliant P1 à P2par une droite. DROITE est l’opérateur qui s’applique sur les opérandes P1 et P2 et le résultats’appelle LIGNE.
La procédure peut utiliser, suivant sa définition, l’une ou l’autre des syntaxes.
Il convient de compléter ce paragraphe en précisant quelques règles syntaxiques deGIBIANE :
• le point - virgule termine une instruction.
• une instruction doit être écrite sur moins de 9 lignes.
• une ligne peut contenir plusieurs instructions
• les lignes de commentaire sont précisées par un astérisque dans la première colonne.
• les opérateurs et les directives sont définis par leurs 4 premiers caractères mais onpeut en donner plus s’ il n’y a pas de confusions possibles (ex : TRAC, TRACE,TRACER).
• une procédure se distingue au niveau utili sateur par la nécessité de l’orthographiercorrectement avec toutes ses lettres (<8).
• l’ instruction est interprétée de gauche à droite, et les opérateurs sont exécutés dèsqu’ ils sont lus. Ainsi 1+2*3=9 . Pour retrouver l’ordre de priorité mathématique ilconvient d’ajouter des parenthèses : 1+(2*3)=7
• seuls les 72 premiers caractères d’une ligne sont pris en compte.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
5
• la longueur du nom attribué à un objet ne doit pas dépasser 8 caractères. Il estconseill é d’éviter d’attribuer à un objet le nom d’un opérateur existant, car ce dernierserait alors écrasé. Pour cela on peut conseill er de ne pas donner des noms de 4caractères et de mettre un nombre en fin de nom (il n’y a qu’un opérateur ayant unnombre en fin de nom c’est CER3) ou de protéger les opérateurs et directives enutilisant les côtes (ex : ‘DROI’).
Il n’a été listé que les principales règles syntaxiques de Gibiane, pour en savoir plussur les possibilités de ce langage voir la liste des documents de référence en annexe 4.
I.1.3. Type d’objet et principaux opérateurs
Les objets disponibles dans CASTEM 2000 sont classés selon le type d’ informationsqu’ ils renferment et selon la signification que prennent ces informations dans l’analyse. Laliste des principaux types d’objets est présentée en annexe 1. On note également que le type dechaque objet peut être obtenu en listant son contenu à l’aide de l’opérateur LIST.Nous allons cependant revenir sur quelques objets manipulés par CASTEM qui nécessitentdes explications.
a) Champs par point :
Dans un objet de type champ par point (CHPOINT), on associe à chaque point une ouplusieurs composantes qui sont repérées par leur nom. Les noms des composantes sont :
- soit choisis par l’utilisateur- soit déterminés par les opérateurs qui créent les objets.
Le champ peut être indéterminé, diffus (quand il représente une grandeur continue comme unchamp de déplacement) ou discret (quand il représente une valeur discrète comme une forcenodale).Les points concernés par le CHPOINT sont référencés dans un objet maill age qui contient deséléments à 1 noeud de type poi1.
b) Champs par élément :
Ce sont des objets contenant des données définies dans les éléments, par exemple :
- des caractéristiques des matériaux- des caractéristiques géométriques (épaisseurs, section...).- des contraintes....
Le champ est connu par ses valeurs définies soient :
- au centre de gravité de l’élément- aux noeuds de l’élément- aux points d’intégration de l’élément.
Remarquons que l’on peut construire un champ par point à partir d’un champ par élément.Pour cela, on calcule la moyenne aux noeuds des éléments adjacents.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
6
Supposons que l’on ait un champ par élément (CHAM1) , défini au centre de gravité de lafaçon suivante :
1 2 3
Avec l’opérateur CHAN(GER) on construit un champ par point :
CHP1=CHAN CHPO MOD1 CHAM1
On obtient :
1 1.5 2.5 3On remarque que si l’on repasse du champ par point CHP1 à un champ par élément CHAM2on ne retrouve pas le champ CHAM1 de départ. On obtient alors :
1.25 2. 2.75
c) Objets de type LISTREEL et EVOLUTION :
On peut définir un objet de type liste de réels (LISTREEL) par le biais de l’opérateurPROG. Exemple : LISTE1 = ‘PROG’ 0. 0.5 1. 1.5 2.0 2.5 2.5 2.5 2.5 2.5 ;On peut utili ser la notion de pas, de nombre de pas et de nombre de valeurs à répéter pouralléger les écritures. Ainsi LISTE1 pouvait également s’écrire :LISTE1 = ‘PROG’ 0. PAS 0.5 NPAS 5 4*2.5 ;On peut, de la même manière, créer des listes d’entiers (LISTENTI) avec l’opérateur LECT.
A partir de plusieurs listes on peut définir l’évolution d’une ou plusieurs grandeurs enfonction d’un paramètre. L’opérateur utili sé est EVOL(UTION) avec l’option MANU etl’objet créé est de type évolution.ex : LISTEX = ‘PROG’ 0. PAS 1 9 ;EVOL1 = ‘EVOL’ ‘MANU’ ‘TEMPS’ LISTEX ‘FORCE’ LISTE1 ;On vient de créer l’évolution de la force en fonction du temps :
Evolution d e la force en fonction du temps
0
0,5
1
1,5
2
2,5
0 1 2 3 4 5 6 7 8 9
FORCE

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
7
L’opérateur EVOL supporte deux autres options :
- COMP : qui permet de définir une fonction complexe à partir de 3 listes de réels.- CHPO : qui permet de définir l’évolution d’une composante d’un champ
(déplacement, force...) le long d’une ligne de noeuds.
d) Objet de type table :
L’opérateur TABL(E) sert à créer un objet de type TABLE qui peut entre autre, supporter unestructure en arborescence. On accède aux objets contenus dans une table en précisant l’ indicesous lequel il est rangé.Exemple :
Tab le d e sortie d e l'op é rateu r V IB R = TB
TB .M O D E S .M A IL L A G Eob jet m aillag e
TB .M O D E S .1.D E F O R M E E -M O D A L E
TB .M O D E S .1.N U M E R O -M O D E
TB .M O D E S .1.F R E Q U E N C E
TB .M O D E S .1d e sou s -typ e M O D E
...
TB .M O D E S .2d e sou s -typ e M O D E
TBd e sou s -typ e B A S E -M O D A L E
L’indice MODES de TB représente une table dont l’indice 1 représente aussi une table dontl’indice FLOTTANT donne la première fréquence propre.On pourrait écrire :
T1 = TB.MODES ;T2 = T1.1 ;FLOT = T2.FREQUENCE ;
I.1.4. Principaux opérateurs
La liste des principaux opérateurs classés par ordre alphabétique est présentée en annexe 2.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
8
I.1.5. Système d’unités
Castem 2000 ne dispose d’aucun système particulier d’unité de mesure. C’est àl’utili sateur de fournir les données dans un système cohérent vérifiant la loi fondamentale dela dynamique : F = M . γAinsi on peut donner deux exemples de systèmes cohérents (pour de l’acier) :
Longueur Masse Force Temps Masse Volumique Module d’Young Contrainte ou Pression
m kg N Sec 7.85 103 2. 1011 Pamm 10 kg N Sec 7.85 10-9 2. 105 MPa
Seule la mesure des angles doit être dans tous les cas exprimée en degrés pour lagéométrie et en radians pour les résultats obtenus.
I.1.6. Analyse par éléments finis
Tout problème d’éléments finis peut être construit de la manière suivante :
a) Description de la géométrie, maillage. Choix du support géométrique.
b) Choix du type d'éléments finis et du modèle de comportement.
c) Donnée des caractéristiques du matériau et des caractéristiques géométriquessupplémentaires.
d) Donnée des conditions aux limites.
e) Donnée du chargement.
f) Résolution du système.
g) Post-traitement des résultats.
Nous allons, dans la suite du document, reprendre ce processus en le détaillant sur desexemples simples.
I.1.7. Problèmes pouvant être résolus par CASTEM
CASTEM dispose d’un certain nombres d’exemples reprenant la majorité des problèmespouvant être traités. Ces exemples sont disponibles dans le répertoire dgibi du user contenantcastem.
I.1.8. Liste des ouvrages de présentation
La liste des documents de présentation concernant CASTEM 2000 est présentée en annexe 4.Il existe de nombreux autres documents dont on peut trouver la liste dans « Liste des rapportsCEA/DMT relatifs à CASTEM 2000 » - A. De Gayffier - Rapport LAMS 94-531.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
9
I.2. Maill age
I.2.1. Généralités
L’objet du maill age est de discrétiser géométriquement le domaine d’analyse de manière àpouvoir ultérieurement associer une formulation éléments finis au support géométrique.Concrètement cette discrétisation s’effectue par la création d’objets de type maill age (points,lignes, surfaces, volumes) à l’aide des opérateurs géométriques.La technique à suivre est presque toujours la même :
- construction des points- construction des lignes à partir des points- construction des surfaces à partir des lignes- construction des volumes à partir des surfaces.
Dans un premier exemple, nous allons chercher à mailler un cube de côté 10 m, de plusieursfaçons possibles.
I.2.2. Proposition de solution pour un maillage régulier** DEBUT DU FICHIER MAILLE1.DGIBI*TITR ‘ PREMIER MAILLAGE’ ;OPTI DIME 3 ELEM CUB8 ;** POINTS*P1 = 0. 0. 0. ;P2 = 10. 0. 0. ;P3 = 10. 10. 0. ;P4 = 0. 10. 0. ;** LIGNES*P1P2 = P1 DROI 10 P2 ;P2P3 = P2 DROI 10 P3 ;P3P4 = P3 DROI 10 P4 ;P4P1 = P4 DROI 10 P1 ;** SURFACE*SURF1 = DALL P1P2 P2P3 P3P4 P4P1 ;** VOLUME*VOL1 = SURF1 VOLU 10 TRANS (0. 0. 10.) ;**TRACAGE*TRAC SURF1 QUAL ;TRAC CACH VOL1 ;**FIN DU FICHIER*FIN ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
10
I.2.3. Analyse de la solution
TITR 'PREMIER MAILLAGE' ;
Donne un nom à l’étude.
OPTI DIME 3 ELEM CUB8 ;
On aurait également pu écrire OPTION DIMENSION 3 ELEMENT CUB8 ;La directive OPTI(ON) permet de déclarer les principaux paramètres du programme, parexemple la dimension de l’espace, le type d’éléments géométriques utilisé....Ici on travaill e en trois dimensions d’où le choix de DIME(NSION) 3, et un choix d’élémentsgéométriques appropriés à notre problème semble être les éléments CUB8. Le choix de ladimension et des éléments géométriques est très lié à celui des éléments finis et donc au typed'étude. L'annexe 3 présente la documentation relative à l'opérateur MODE. On y trouve lesdifférents types d'études traitables par CASTEM 2000, ainsi que les éléments et supportsgéométriques appropriés.
P1 = 0. 0. 0. ;P2 = 10. 0. 0. ;P3 = 10. 10. 0. ;P4 = 0. 10. 0. ;
Le point est construit en associant à son nom, ses coordonnées et une densité (définie enquatrième coordonnée). Nous reviendrons sur cette notion de densité dans l’exemple suivant.Remarquons que l’objet de type POIN est également utili sé pour représenter un vecteur(VEC1=3. 2. ;)
P1P2 = p1 DROI 10 p2 ;P2P3 = p2 DROI 10 p3 ;P3P4 = p3 DROI 10 p4 ;P4P1 = p4 DROI 10 p1 ;
L’opérateur DROI(TE) ou D permet de construire une ligne droite à partir de ses deux pointsextrêmes et de la règle permettant de calculer les coordonnées des points internes. Ces lignescréées sont orientées et automatiquement subdivisées en un certain nombre de segments quel’on pourra spécifier. Ici on a spécifié 10 segments entre deux points.Les opérateurs CERC, CER3, PARA, CUBP, CUBT, COURBE, QUELCONQUE etINTERSECTION permettent également de tracer des courbes telles que des arcs de cercle, deparaboles, des lignes brisées... On se reportera à la notice d’utili sation de CASTEM 2000 pourplus de précision.
SURF1 = DALL P1P2 P2P3 P3P4 P4P1 ;
L’opérateur DALL(ER) permet de construire une surface délimitée par 4 côtés ayant deux àdeux le même nombre de points et formant une ligne fermée. Il a été étendu à des cas où lescotés se faisant face n’ont pas le même nombre de points. Le résultat obtenu n’est alors pastoujours satisfaisant, il faut alors utili ser l’opérateur SURFACE. On peut aussi définir unesurface entre deux segments avec l’opérateur REGL(ER), ou à partir de la translation ou de larotation d’une ligne quelconque avec les opérateurs TRAN et ROTA.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
11
VOL1=SURF1 VOLU 10 TRAN (0. 0. 10.) ;
L’opérateur VOLU(ME) permet de construire des volumes.
Ceci peut se faire :
- par translation de surface suivant un vecteur avec l'option TRAN comme dans notreexemple.
- par translation parallèlement à une génératrice avec l'option GENE.Exemple : VOL2 = SURF1 VOLU 10 GENE LIG1 ;
- par rotation de surface entre deux vecteurs.Exemple : VOL3 = SURF1 VOLU 10 ROTA SURF2 ;
- en construisant un maillage automatique à partir de la donnée de l’enveloppe duvolume. Exemple :VOLE = SURFENV VOLU ;
Le nombre 10 signale que l’on met 10 éléments dans la direction donnée.Le second et seul autre opérateur permettant de créer des volumes est l’opérateur PAVE(R)qui maill e l’ intérieur d’une surface parallélépipèdique. Mais uniquement dans ce cas où les sixfaces ont été générées par DALL(ER).
TRAC SURF1 QUAL ;
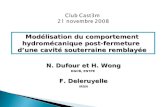
La directive TRAC(ER) trace un objet de type maill age (ici la surface de base). L’optionQUAL(IFICATION) permet d’afficher les noms des objets visualisés à l’écran.Le résultat obtenu est présenté sur la figure I-1.
PREMIER MAILLAGE
P1
P2
P3
P4
P1P2P2P3
P3P4P4P1
SURF1
Figure I-1 : Surface maillée régulièrement 10 * 10

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
12
TRAC CACH V1 ;
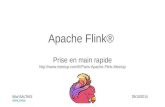
L’option CACH(E) permet de visualiser le volume VOL1 avec les faces cachées.Le résultat obtenu est présenté sur la figure I-2.
PREMIER MAILLAGE
Figure I-2 : Volume maillé régulièrement 10 * 10
I.2.4. Maillage avec densité variable
La densité est un nombre réel qui correspond à la taill e moyenne des élémentsadjacents. On peut ainsi définir un maill age plus fin sur une zone de la géométrie. Ceci permetd’obtenir plus de précision sur les zones où les phénomènes étudiés sont les plus sensibles.Reprenons l’exemple de notre cube et maillons plus finement autour du point P1(0. 0. 0.) .** DEBUT DU FICHIER MAILLE2.DGIBI*TITR MAILLAGE VARIABLE 1 ;OPTI DIME 3 ELEM CUB8 ;** POINTS*DENS 0.01 ;P1=0. 0. 0. ;DENS 1. ;P2=10. 0. 0. ;P3=10. 10. 0. ;P4=0. 10. 0. ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
13
** LIGNES*P1P2=P1 DROI P2 ;P2P3=P2 DROI P3 ;P3P4=P3 DROI P4P4P1=P4 DROI P1 ;LTOT=P1P2 ET P2P3 ET P3P4 ET P4P1 ;** SURFACE*SURF1=SURF PLAN LTOT ;** VOLUME*VOL1=SURF1 VOLU TRANS (0. 0. 10.) DINI 0.01 DFIN 1. ;** TRACAGE*TRAC QUAL SURF1 ;TRAC CACH VOL1 ;** FIN DU FICHIER*FIN ;*
On remarque sur cet exemple que l’on a défini une densité plus faible pour P1 que pour lesautres points. Pour cela on a utili sé la directive DENS. On n’a donc plus les mêmes nombresd’éléments sur les différentes lignes. On ne peut donc plus utili ser DALL(ER), nous allonscréer la surface avec SURF(ACE). Cet opérateur s’applique sur une ligne fermée que nousavons créée sous le nom LTOT. Pour créer une ligne fermée il faut ajouter les segments en laparcourant dans un sens donné. L’orientation de la normale à la surface dépend de ce sens.Notons également la syntaxe de l’opérateur VOLU permettant de préciser la densité de débutde translation et celle de fin de translation.Les résultats obtenus sont présentés sur les figures I-3 et I-4.
MAILLAGE VARIABLE 1
P1
P2
P3
P4
P1P2
P2P3
P3P4
P4P1
LTOT SURF1
Figure I-3 : Surface maillée avec densité variable

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
14
MAILLAGE VARIABLE 1
Figure I-4 : Volume maillé avec densité variable
On remarque plusieurs choses :- on a bien un maillage plus précis près de P1(0. 0. 0.).- le nombre d’éléments a été fixé par le code.- pour pouvoir maill er correctement l’opérateur SURF(ACE) utili se parfois deséléments TRI3 même si l ’on a spécifié uniquement des éléments CUB8. En fait, dansOPTION ELEMENT, on définit une classe d’élément linéaire ou quadratique et leniveau le plus complexe.Ainsi : TRI3 autorise des éléments POI1, SEG2 et TRI3
CUB8 autorise POI1, SEG2, TRI3, QUA4, TET4, PYR5 et PRI6QU8 autorise POI1, SEG3, TRI6 et QUA8
I.2.5. Maillage avec densité variable et nombre d’états constant
Le maill age précédent comporte un nombre très important d’éléments ce qui va rendreles calculs très lourds. Il est donc souvent utile de pouvoir utili ser une densité variable (pourprendre en compte les singularités d’un problème) tout en contrôlant le nombre d’éléments(pour éviter des temps de calcul trop importants).Reprenons l’exemple précédent en fixant à 10 le nombre d’éléments par côté.Dans ce cas là, la solution est la suivante :** DEBUT DU FICHIER MAILLE3.DGIBI*TITR 'MAILLAGE VARIABLE 2’ ;OPTI DIME 3 ELEM CUB8 ;*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
15
* POINTS*P1=0. 0. 0. ;P2=10. 0. 0. ;P3=10. 10. 0. ;P4=0. 10. 0. ;** LIGNES*P1P2=P1 DROI -10 P2 DINI 0.01 DFIN 1. ;P2P3=P2 DROI 10 P3 ;P3P4=P3 DROI 10 P4 ;P4P1=P4 DROI -10 P1 DINI 1. DFIN 0.01 ;** SURFACE*SURF1=DALL P1P2 P2P3 P3P4 P4P1 ;** VOLUME*VOL1=SURF1 VOLU -10 TRANS (0. 0. 10.) DINI 0.01 DFIN 1. ;** TRACAGE*TRAC QUAL SURF1 ;TRAC CACH VOL1 ;** FIN DU FICHIER*FIN ;
Dans ce cas, les points sont définis comme dans notre premier exemple, mais sur lesdroites s’appuyant sur P1 on spécifie la variation de densité entre la valeur initiale (origine dela ligne) et la valeur finale (point du bout de ligne). Le fait de mettre -10 signifie que l’on veut10 éléments et le signe négatif spécifie que la densité sera variable. Cette syntaxe est similaireà celle qui permet de définir le volume à partir de la surface. On peut remarquer quel’opérateur DALL(ER) peut être utili sé pour définir la surface puisque l’on a le même nombred’éléments sur les cotés en regard (même si ces éléments n’ont pas la même taille).Le résultat obtenu est présenté sur les figures I-5 et I-6.
MAILLAGE VARIABLE 2
P1
P2
P3
P4
P1P2 P2P3
P3P4
P4P1
SURF1
Figure I-5 : Surface maillée avec densité variable et nombre d'éléments fixés

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
16
MAILLAGE VARIABLE 2
Figure I-6 : Volume maillé avec densité variable et nombre d'éléments fixés
I.2.6. Maillage avec élimination de noeuds
Dans l’exemple suivant, on se propose de mailler un tube de longueur 10 et de sectioncarrée de coté 5.Le fichier de données est alors le suivant :
** DEBUT DU FICHIER MAILLE4.DGIBI*TITR ‘TUBE CARRE’ ;OPTI DIME 3 ELEM QUA4 ;OEIL1 = 100. 95. 90. ;** POINTS*P1 = 0. 0. 0. ;P2 = 5. 0. 0. ;P3 = 5. 5. 0. ;P4 = 0. 5. 0. ;** LIGNES*P1P2 = P1 DROI 5 P2 ;P2P3 = P2 DROI 5 P3 ;P3P4 = P3 DROI 5 P4 ;P4P1 = P4 DROI 5 P1 ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
17
** SURFACES*SURF1 = P1P2 TRANS 10 (0. 0. 10.) ;SURF2 = P2P3 TRANS 10 (0. 0. 10.) ;SURF3 = P3P4 TRANS 10 (0. 0. 10.) ;SURF4 = P4P1 TRANS 10 (0. 0. 10.) ;SURFTOT = SURF1 ET SURF2 ET SURF3 ET SURF4 ;** TRACAGE*TRAC OEIL1 SURFTOT QUAL ;** ELIMINATION DES NOEUDS EN COMMUN*ELIM 0.01 SURFTOT ;** TRACAGE APRES ELIMINATION*TRAC SURFTOT QUAL ;** FIN DU FICHIER*FIN ;*
La première partie du fichier est similaire aux cas précédents, signalons simplementl’utili sation d’éléments plan QUA4 à la place des éléments volumiques CUB8 puisque l’on nemaill e qu’une surface fermée. Notons également la définition d’un point de vue (OEIL1) àpartir duquel sera regardée la structure.
Les différentes surfaces sont créées par translation de lignes suivant un vecteur enprécisant le nombre d’éléments souhaités dans la direction du vecteur de translation.On construit ensuite la surface fermée complète par association des quatre surfaces planes.
On trace alors la surface obtenue en précisant le point de vue et en ajoutant l’optionQUAL pour voir le nom des différents éléments de la structure. Le résultat obtenu est présentésur la figure I-7.
TUBE CARRE
P1
P2
P3
P4
P1P2
P2P3 P3P4
P4P1
SURF1
SURF2 SURF3
SURF4
SURFTOT
FIGURE I-7 : Tube carré 1

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
18
Il faut cependant préciser qu’à ce moment du fichier, les quatre surfaces planes sonttotalement indépendantes (excepté aux points P1 P2 P3 P4). L’objet SURFTOT ne fait que lesregrouper pour rendre la manipulation de l’ensemble plus aisée mais elle ne crée pas de lienmécanique. En effet, sur chacune des arrêtes, les deux surfaces en contact ont créé des noeudsqui leur sont propres. On n’a donc pas 10 noeuds sur les arrêtes mais 20. Pour solidariser lessurfaces il faut rendre commun les noeuds des arrêtes ayant les mêmes coordonnées. Pour celaon utili se la directive ELIM qui fusionne les noeuds situés à moins d’une distance donnée lesuns des autres. Ici cette distance est fixée à 0.01 . Après cette opération le code précise :‘Nombre de noeuds éliminés 40’ , ce qui correspond bien à 10 noeuds éliminés sur chacunedes quatre arrêtes . A partir de ce moment la structure globale est bien constituée d’une seuleentité mécanique.
L’utili sation de la directive ELIM est dangereuse, il est diff icile de contrôler son bonfonctionnement. Nous conseill ons de ne l’utili ser que si l ’on est capable de prédire combien ily aura de noeuds en double. La solution pour maill er le tube sans éliminer les noeuds endouble est de ne pas les créer ! !Par exemple :
L1 = P1P2 ET P2P3 ET P3P4 ET P4P1 ;SURFTOT = L1 TRANS 10 50. 0. 10. ) ;
Avec cette méthode, on n’a pas de noeuds doubles mais les surfaces SURF1, SURF2... ne sontpas nommées. Ceci peut se faire en combinant l’utili sation des opérateurs POINT etELEMENT :
GEO1 = SURFTOT POIN PLAN P1 P2 (0. 0.01 0.) 0.1 ;SURF1 = ELEMENT SURFTOT APPUYER STRICTEMENT GEO1 ;
On trace ensuite le maill age total sans préciser le point de vue et on obtient le résultatde la figure I-8. Suite à l’élimination, le programme a perdu le point de vue précisé au départ.Par défaut, la figure est regardée à partir du point (0. 0. 0.). Si on veut retrouver la figure I-7 ilfaut préciser à nouveau OEIL1 dans l’appel à l’opérateur ‘trac’ . Précisons enfin que si l ’on nedéfinit pas de point de vue, la valeur prise par défaut avant ELIM n’est pas (0. 0. 0.) mais unevaleur permettant une visualisation très correcte.
TUBE CARRE
P1
P2P3P4
P1P2
P2P3P3P4
P4P1SURF1
SURF2SURF3
SURF4SURFTOT
FIGURE I-8 : Tube carré 2

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
19
II. Calculs mécaniques
II.1. Premier calcul mécanique linéaire
II.1.1. Objectif du calcul
Le but de ce calcul est de voir sur un exemple très simple l’enchaînement des étapesnécessaires à un calcul par éléments finis par CASTEM 2000. Pour cela on veut calculer ladéformée d’une poutre encastrée à une extrémité et subissant une force fléchissante à l’autreextrémité.Les données du problème sont :
F = 10 N : force appliquéeL = 1 m : longueurρ = 7800 kg/m3 : masse volumiqueS = 1,392.10-4 m2 : sectionIyy = 2,673.10-10 m4 : inertie suivant yIzz= 2,673.10-10 m4 : inertie suivant zIT =1,0.1010 : inertie de torsionE=210000MPa : module d’Young
Le résultat recherché est la flèche à l’extrémité.
II.1.2. Proposition de solution** DEBUT DU FICHIER MECA1.DGIBI*TITR ‘PREMIER CALCUL MECANIQUE’ ;OPTI DIME 3 ELEM SEG2 ;** GEOMETRIE*P1 = 0. 0. 0. ;P2 = 1. 0. 0. ;POUTRE1=P1 DROI 10 P2 ;** CHOIX DU COMPORTEMENT DU MATERIAU ET DU MODELE EF*M1=MODE POUTRE1 MECANIQUE ELASTIQUE ISOTROPE POUT ;** DONNEES MATERIAU ET ELEMENT*CARMAT1=MATE M1 YOUN 2.1E11 NU 0.3 RHO 7.8E3 ;CAREF1=CARA M1 SECT 1.392E-4 INRY 2.673E-10 INRZ 2.673E-10 TORS 1.E10 ;CARTOT1=CARMAT1 ET CAREF1 ;** CONDITIONS AUX LIMITES*COND1=BLOQ DEPL ROTA P1 ;** CHARGEMENT*FOR1=FORC (0. 0. -10.) P2 ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
20
** RESOLUTION*RIGI1=RIGI M1 CARTOT1 ;RIGICL1=RIGI1 ET COND1 ;DEPL1=RESO RIGICL1 FOR1 ;** POST-TRAITEMENT*F1=EXTR DEPL 1 UZ P2 ;F1=1.E3*F1 ;MESS ‘FLECHE EN P2’ F1 ‘mm’ ;OEIL1=0. -1000. 0. ;DEF0 = DEFO POUTRE1 DEPL1 0. BLAN ;DEF1 = DEFO POUTRE1 DEPL1 ROUG ;TRAC OEIL1 (DEF0 ET DEF1) ;** FIN DU FICHIER*FIN ;
II.1.3. Analyse de la solution
a) Début de l’étude :
TITR ‘PREMIER CALCUL MECANIQUE’ ;
Donne un nom à l’étude.
OPTI DIME 3 ELEM SEG2 ;
Le problème mécanique nous amène à choisir des éléments finis de type poutre. Ladocumentation ( présentée en annexe 3 ) nous informe que les éléments géométriquescorrespondant à l'élément POUT sont des SEG2 et que la dimension requise pour ce typed’étude est 3.
b) Définition de la géométrie :
P1 = 0. 0. 0. ;P2 = 1. 0. 0. ;POUTRE1 = P1 DROI 10 P2 ;
La géométrie est décrite en plaçant les points extrémités P1 et P2, et en traçant une lignedroite entre P1 et P2 contenant 10 segments.
c) Choix du modèle de comportement et du type d’Eléments Finis :
M1=MODE POUTRE1 MECANIQUE ELASTIQUE ISOTROPE POUT ;
L’opérateur MODE(LE) (cf annexe 3) sert à définir un type de comportement et uneformulation E.F. qui seront affectés à un objet de type maill age. L’objet créé (ici M1 ) est detype MMODEL.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
21
On a affecté sur la géométrie POUTRE1 des éléments finis de type POUT et une loi decomportement mécanique élastique isotrope.
d) Entrée des caractéristiques des matériaux et de celles nécessaires au modèle E.F.
CARMAT1=MATE M1 YOUN 2.E11 NU 0.3 RHO 7.8E3 ;
MATE(RIAU) sert à définir les propriétés physiques du matériau (Module d’Young,coeff icient de Poisson...) pour un modèle donné. L’objet créé est de type champ par élément(MCHAML) à plusieurs composantes : YOUN, NU, RHO, ALPH,...
CAREF1=CARA M1 SECT....... TORS 1.E10 ;
Certains éléments nécessitent la donnée de caractéristiques supplémentaires qui ne peuvent sedéduire de la géométrie. Dans le cas des poutres (POUT) il faut préciser SECT, INRY, INRZ,TORS. Dans le cas des barres (BARR) il suff it de préciser la section. Dans le cas des coques(COQ2, COQ3, COQ4, DKT, COQ6, COQ8), il faut préciser l’épaisseur (EPAI) etl’excentricité (EXCE).
CARTOT1=CARMAT1 ET CAREF1 ;
On prend en compte dans CARTOT1 l’ensemble des caractéristiques définies. On peutpréciser ici que tout cela aurait pu s’écrire en une seule ligne :
CARTOT1=MATE M1 YOUN......TORS 1.E10 ;
Cependant, il nous a semblé pédagogique de séparer les caractéristiques suivant leurs origines.
e) Conditions aux limites :
COND1=BLOQ DEPL ROTA P1 ;
Les conditions aux limites sont traitées dans CASTEM 2000 par la méthode desmultiplicateurs de Lagrange.Elles sont écrites sous la forme : [C] {u}={q}
L’utilisateur doit alors construire deux objets :
1) La rigidité [C] à adjoindre à la rigidité du système libre grâce à l’opérateur BLOQ(UER)
2) Le vecteur {q} à adjoindre au vecteur des forces nodales grâce à l’opérateur DEPI(MPOSE). Par défaut, ce vecteur est mis à zéro.
Dans le cas qui nous intéresse, les déplacements sont fixés nuls il n’y a donc pas besoin decréer le vecteur {q}.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
22
Signalons quelques autres opérateurs utilisables dans des cas particuliers :
- SYMT permet de spécifier des conditions aux limites de symétrie par rapport à un plan ou une droite.
- RELA permet d’imposer une combinaison linéaire quelconque des déplacements en différents points.
- VISAVIS permet d’extraire les noeuds en vis à vis de 2 géométries.
f) Conditions de chargement :
FOR1=FORC (0. 0. -10.) P2 ;
Définir le chargement revient à définir un champ par point correspondant au vecteur dusecond membre de [K]{u}={f}.
Ici on applique une force de -10 N suivant l’axe z au point P2. Ceci s’effectue avec l’opérateurFORC(E). On aurait pu également écrire FOR1=FORC FZ -10. P2 ;
La syntaxe de l’opérateur MOME(NT) est du même type.L’opérateur pression, sera quant à lui étudié ultérieurement.
g) Résolution :
L’ensemble des données étant défini, on peut constituer le système [K]{u}={f} et le résoudre.
RIGI1=RIGI M1 CARTOT1 ;
L’opérateur RIGI(DITE) permet de construire la matrice de rigidité à partir du modèle et descaractéristiques relatives au modèle.
RIGICL1=RIGI1 ET COND1 ;
Comme nous l’avons dit dans le paragraphe conditions aux limites, il convient de prendre encompte la matrice des blocages au sein de la matrice rigidité.
DEPL1=RESO RIGICL1 FOR1 ;
L’opérateur RESO(UD) résout le système [K]{u} ={ f}. Ces déplacements, solutions duproblème, sont stockés dans DEPL1.
h) Post traitement :
F1=EXTR DEPL1 UZ P2 ;
L’opérateur EXTR(AIRE) permet d’extraire une composante d’un ensemble de valeurs. Ici onrecherche le déplacement en UZ du point P2 au sein du vecteur solution en déplacementDEPL1.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
23
F1 = 1.E3 * F1 ;
La résolution par RESO donne des résultats en mètres avec notre choix d’unité. Pour l’avoiren mm on le multiplie donc par 1000.
MESS ‘FLECHE EN P2’ F1 ‘mm’ ;
La directive MESS(AGE) permet d’afficher un message sur l’unité de sortie.
OEIL1 = 0. -1000. 0. ;
On définit ici le point à partir duquel sera vue la structure lors des visualisations. On peut ainsidéfinir de multiples points de vue.
DEF0 = DEFO POUTRE1 DEPL1 0. BLAN ;DEF1 = DEFO POUTRE1 DEPL1 ROUG ;TRAC OEIL1 (DEF0 ET DEF1) ;
L’opérateur DEFO(RME) construit la déformée d’une structure à partir de la géométrieinitiale et d’un champs de déplacement. On peut également préciser un certain nombred’options comme la couleur (ici BLAN(C) et ROUG(E)), ou le facteur d'ampli fication pourrendre les phénomènes plus visibles. Ici on utili se un facteur multiplicatif de 0 sur DEF0. Cecipermet de visualiser la structure non déformée en même temps que la déformée finale DEF1.Cet artifice est nécessaire car la directive TRAC(ER) ne peut être appliquée qu’à des objets demême type. On ne pourrait donc pas avoir : TRAC OEIL1 (POUTRE1 ET DEF1) car l’un estde type maill age et l’autre déformée. On remarque également l’utili sation du point OEIL1pour préciser le point de vue selon lequel on doit effectuer le traçage des déformés.Le résultat obtenu est présenté sur la figure II-1.
PREMIER CALCUL MECANIQUE
AMPLITUDE
0.00E+00 1.7
Figure II-1 : Déformée de la poutre en flexion
h) fin du programme :
FIN ;La directive FIN permet de quitter CASTEM 2000.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
24
II.2. Calcul mécanique avec force de press ion et de poids propre
II.2.1. Objectif du calcul
Le but de ce calcul est de calculer la déformée d’une sphère soumise :- à une pression interne- à un poids propre- à une force radiale en tête.
Le calcul sera effectué en axisymétrique dans le domaine élastique.
II.2.2. Proposition de solution** DEBUT DU FICHIER MECA2.DGIBI*TITR ‘SPHERE SOUS PLUSIEURS TYPES DE CHARGEMENTS’ ;OPTI DIME 2 ELEM SEG2 MODE AXIS ;** GEOMETRIE*A = 0. 0. ;B = 1. 1. ;C = 0. 1. ;LIGNE1=CERC 100 A C B ;TITR ‘MAILLAGE DE LA SPHERE’ ;TRAC LIGNE1 QUAL ;** CHOIX DU COMPORTEMENT DU MATERIAU ET DU MODELE EF*MO1=MODE LIGNE1 MECANIQUE ELASTIQUE ISOTROPE COQ2 ;** DONNEES MATERIAU ET ELEMENTS*MA1=MATE MO1 YOUN 2.1E11 NU 0.3 RHO 7.85E3 ;CA1=CARA MO1 EPAI 0.02 ;** CONDITIONS AUX LIMITES*CL1=BLOQ B UZ RT ;CL2=BLOQ A UR RT ;CLTOT=CL1 ET CL2 ;** CHARGEMENT** PRESSION INTERNE UNIFORMEFO1=PRES COQU MO1 -10000 NORM ;VECTF1=VECT FO1 1.E-4 FR FZ ROUG ;TITR ‘PRESSION INTERNE’ ;TRAC VECTF1 LIGNE1 ;* POIDS PROPREMAS1=MASS MO1 (MA1 ET CA1) ;POP1=MANU CHPO LIGNE1 1 UZ -9.81 NATURE DIFFUS ;FO2=MAS1 * POP1 ;* FORCE RADIALE SUR LE DIAMETREFO3=FORC FR 1000 B ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
25
* FORCE TOTALEFOTOT=FO1 ET FO2 ET FO3 ;VECTF2=VECT FOTOT 2.E-4 FR FZ ROUG ;TITR ‘FORCE TOTALE’ ;TRAC VECTF2 LIGNE1 ;** RESOLUTION*RIG1=RIGI MO1 (MA1 ET CA1) ;RIGCL1=RIG1 ET CLTOT ;RES1=RESO RIGCL1 FOTOT ;DR1=EXTR RES1 UR B ;DR1=1.E6 * DR1 ;** POST-TRAITEMENTMESS ‘ DEPLACEMENT RADIAL ‘ DR1 ‘MICRON’ ;DEF0=DEFO LIGNE1 RES1 0. BLAN ;DEF1=DEFO LIGNE1 RES1 ROUG ;TITR ‘DEFORMATION DE LA SPHERE’ ;TRAC (DEF0 ET DEF1) ;** FIN DU FICHIER*FIN ;*
II.2.3. Analyse de la solution proposée
a) Début du programme :
TITR ‘SPHERE SOUS PLUSIEURS TYPES DE CHARGEMENTS’ ;OPTI DIME 2 ELEM SEG2 MODE AXIS ;
L’option MODE AXIS(YMETRIE) précise que l’on effectue un calcul en axisymétrie. Dansce cas, pour les coordonnées, l’axe x correspond à l’axe r et l’axe y correspond à l’axed’axisymétrie z. Les déplacements sont notés UR, UZ ,UT pour les déplacements radiaux,axiaux et en theta.
b) Géométrie :
A = 0. 0. ;B = 1. 1. ;C = 0. 1. ;LIGNE1=CERC 100 A C B ;TITR ‘MAILLAGE DE LA SPHERE’ ;TRAC QUAL LIGNE1 ;
On définit un quart de cercle, par l’opérateur CERC(LE) qui, ici, trace un arc de cercle entre Aet B, de centre C, en divisant l’ensemble en 100 éléments.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
26
La géométrie obtenue est présentée sur la figure II-2 .
MAILLAGE DE LA SPHERE
A
B
LIGNE1
Figure II-2 : Visualisation de la géométrie - maillage
c) Choix du comportement du matériau et du modèle Eléments Finis :
MO1=MODE LIGNE1 MECANIQUE ELASTIQUE ISOTROPE COQ2 ;
On se place dans le domaine élastique isotrope, et on choisit pour l’étude, des éléments decoque supportés par l’élément géométrique choisi précédent (SEG2). On prend donc deséléments COQ2.
d) Données matériau et éléments :
MA1=MATE MO1 YOUN 2.1E11 NU 0.3 RHO 7.85E3 ;CA1=CARA MO1 EPAI 0.02 ;
Notons simplement que le fait de préciser l’épaisseur par EPAI(SSEUR) est indispensablepour les éléments de type coque. Rappelons ici l ’ importance de se reporter à la notice del’opérateur CARA pour connaître les caractéristiques indispensables à l’utili sation deséléments.
e) Conditions aux limites :
CL1=BLOQ B UZ RT ;CL2=BLOQ A UR RT ;CLTOT=CL1 ET CL2 ;
Ces conditions permettent de rendre compte des symétries du problème, elles auraient pu êtredonnées par l’opérateur SYMT.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
27
f) Chargement :
Celui-ci présente des nouveautés par rapport au programme précédent.
* pression interne uniforme :
FO1=PRES COQU MO1 -10000 NORM ;
L’opérateur PRES(SION) permet de construire un chargement représentatif d’une pression. Ilpeut être suivi de l'option COQU quand il s’applique à des éléments coques ou MASS(IF)quand il s’applique à des éléments massiques. Il est également nécessaire de préciser lemodèle sur lequel on applique la pression, la valeur de cette pression dans l’unité adéquate, etenfin l'option NORM(AL) qui signifie que le chargement est normal à la surface. Pour que lecalcul soit valable, il est nécessaire que les normales aux surfaces soient orientées de manièreuniforme. Pour vérifier cela, on va visualiser le vecteur force de pression.
VECTF1=VECT FO1 1.E-4 FR FZ ROUG ;
L’opérateur VECT(EUR) nous permet de construire un objet contenant les forces sous formede vecteur dont on précise la taille, les directions d’étude et la couleur.
TRAC VECTF1 LIGNE1 ;
On trace alors ces forces représentées sous forme de vecteurs sur la ligne d’étude.
Le résultat obtenu est présenté sur la figure II-3.
PRESSION INTERNE
COMPOSANTESVECTEURS
FR FZ
Figure II-3 : Visualisation des forces de pression
On vérifie que la pression est bien dirigée dans le même sens sur toute la structure.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
28
* Poids propre :
MAS1=MASS MO1 (MA1 ET CA1) ;POP1=MANU CHPO LIGNE1 1 UZ -9.81 NATURE DIFFUS ;FO2=MAS1*POP1 ;
La force de poids propre est calculée par la formule : F = m . γ .On construit donc dans un premier temps la matrice masse, à partir de l’opérateur MASS(E)en précisant le modèle et les caractéristiques (syntaxe similaire à RIGI).Dans un second temps, on construit un champ par point représentant l’accélération. Pour cela,on utili se MANU(EL) qui crée un champs de manière manuelle. L'option CHPO(INT) préciseque l'on veut un champ par point. Ce champs est supporté par la géométrie LIGNE1. Il necontient qu'une composante qui est l'accélération. Elle est fixée à -9,81 suivant l'axe Oz. Deplus, ce champs est de nature diffus puisque l’accélération est un champ continu.Enfin, on multiplie la masse par l’accélération de manière à construire le chargement FO2.
* Force radiale :
FO3=FORC FR 1000 B ;
On applique une force radiale (FR) de 1000N sur le point B à l’aide de l’opérateur FORC(E).
* Force totale :
FOTOT=FO1 ET FO2 ET FO3 ;
On construit le chargement total, prenant en compte les trois types de chargement.
VECTF2=VECT FOTOT 2.E-4 FR FZ ROUG ;TITR ‘FORCE TOTALE’ ;TRAC VECTF2 LIGNE1 ;
Comme dans le cas de la pression, on visualise la force sous forme de vecteurs attachés à lagéométrie pour vérifier nos données.
Le résultat obtenu est présenté sur la figure II-4.
FORCE TOTALE
COMPOSANTESVECTEURS
FR FZ
Figure II-4 : Visualisation de la force totale

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
29
g) Résolution :
RIG1=RIGI MO1 (MA1 ET CA1) ;
On construit la matrice rigidité.
RIGCL1=RIG1 ET CLTOT ;
On prend en compte les conditions aux limites au sein de la matrice de rigidité.
RES1=RESO RIGCL1 FOTOT ;
On calcule les déplacements par résolution du système : {F} = [K] . {U}
DR1=EXTR RES1 UR B ;DR1=1.E6 * DR1 ;
On extrait du résultat le déplacement radial du point B et on le met en micron.
h) Post - traitement :
MESS ‘DEPLACEMENT RADIAL’ DR1 ‘MICRON’ ;
On affiche le résultat concernant le déplacement radial.
DEF0=DEFO LIGNE1 RES1 0. BLAN ;DEF1=DEFO LIGNE1 RES1 ROUG ;TITR ‘DEFORMATION DE LA SPHERE’ ;TRAC (DEF0 ET DEF1) ;
Comme dans l’exemple précédent on définit une déformée avec un facteur d'ampli ficationvalant 0. pour avoir la structure non déformée. On définit une déformation réelle et on traceles deux sur la même figure. Le résultat obtenu est présenté sur la figure II-5.
DEFORMATION DE LA SPHERE
AMPLITUDE
0.00E+00 6.75E+04
Figure II-5 : Déformée de la sphère sous chargement complexe

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
30
II.3. Analyse modale
II.3.1. Objectif de l’étude
Le but du calcul est de calculer les premiers modes propres du portique de la figure II-6.
MAILLAGE DU PORTIQUE
DC
A B
E F
AC
CE
EF
FD
DB
CD
PORTIQ1
Figure II-6 : Visualisation du maillage du portique
II.3.2. Proposition de solution** DEBUT DE FICHIER DYN1.DGIBI*TITR ‘MODES PROPRES D’ ‘UN PORTIQUE’ ;OPTI DIME 3 ELEM SEG2 ;OEIL=0. 0. 1000. ;** GEOMETRIE*A = -0.30 0. 0. ;B = 0.30 0. 0. ;C = -0.30 0.36 0. ;D = 0.30 0.36 0. ;E = -0.30 0.81 0. ;F = 0.30 0.81 0. ;*NELEM1=10 ;AC=A DROI NELEM1 C ;CE=C DROI NELEM1 E ;EF=E DROI NELEM1 F ;FD=F DROI NELEM1 D ;DB=D DROI NELEM1 B ;CD=C DROI NELEM1 D ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
31
*PORTIQ1=AC ET CE ET EF ET FD ET DB ET CD ;*TITR ‘MAILLAGE DU PORTIQUE’ ;TRAC OEIL QUAL PORTIQ1 ;** CHOIX DU COMPORTEMENT DU MATERIAU ET DU MODELE EF*MO1=MODE PORTIQ1 MECANIQUE ELASTIQUE ISOTROPE POUT ;** DONNEES MATERIAU ET ELEMENTCARMAT1=MATE MO1 YOUN 2.1E11 NU 0.3 RHO 7.8E3
SECT 1.392E-4 INRY 2.673E-10 INRZ 2.673-10 TORS 1.E10 ;** CONDITIONS AUX LIMITES*CL1=BLOQ UZ PORTIQ1 ;CL2=BLOQ RX PORTIQ1 ;CL3=BLOQ RY PORTIQ1 ;CL4=BLOQ UX UY RZ A ;CL5=BLOQ UX UY RZ B ;CLTOT1= CL1 ET CL2 ET CL3 ET CL4 ET CL5 ;** CHARGEMENT** PAS DE CHARGEMENT DANS LE CAS DE CALCUL DE MODES PROPRES** RESOLUTION*RIG1=RIGI MO1 CARMAT1 ;RIGCL1=RIGI1 ET CLTOT1 ;MAS1=MASS MO1 CARMAT1 ;FREQINF=1. ;FREQSUP=50. ;* OPTION INTERVALLETB=VIBR INTERVALLE FREQINF FREQSUP RIGCL1 MAS1 TBAS IMPR ;** POST-TRAITEMENT*NMOD=3 ;I=0 ;REPETER BLOC1 NMOD ;
I=I+1 ;FRQ=TB.MODES.I.FREQUENCE ;NUM=TB.MODES.I.NUMERO_MODE ;TITRE ‘DEFORMEE MODALE’ NUM ‘FREQUENCE’ FRQ ;CHP1=TB.MODES.I.DEFORMEE_MODALE ;DEF0=DEFO PORTIQ1 CHP1 0. BLAN ;DEF1=DEFO PORTIQ1 CHP1 ROUG ;TRAC OEIL (DEF0 ET DEFI) ;
FIN BLOC1 ;** FIN DU FICHIER*FIN ;*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
32
II.3.3. Analyse de la solution proposée
a) Données du problème :
Les parties géométrie, comportement du matériau, choix de modèle Eléments Finis,caractéristiques, conditions aux limites et chargement n’ajoutant rien de nouveau à ce quenous avons vu précédemment, nous commencerons notre analyse au niveau de la résolution.
b) Résolution :
RIG1=RIGI MO1 CARMAT1 ;On construit la matrice de rigidité.
RIGCL1=RIG1 ET CLTOT1 ;On prend en compte les conditions aux limites.
MAS1=MASS MO1 CARMAT1 ;On construit la matrice de masse.
FREQINF=1. ;FREQSUP=50. ;On définit les fréquences qui serviront de bornes à notre intervalle de recherche.
TB=VIBR INTERVALLE FREQINF FREQSUP RIGCL1 MAS1 TBAS IMPR ;
L’opérateur VIBR(ATION) extrait les valeurs propres et les vecteurs propres duproblème : K - ω2 . M = 0. Il supporte trois options :
INTERVALLE : qui cherche les fréquences propres dans un intervalle délimité par unefréquence inférieure et une fréquence supérieure. L’algorithme est basé sur une dichotomieavec calcul du nombre de valeurs propres avant et après la valeur de dichotomie afin d’ isolerles fréquences dans un intervalle, puis on travaill e comme dans proche à partir de la valeurcentrale des intervalles.
PROCHE : qui cherche les fréquences propres proches de valeurs précisées. Les valeurs sontentrées sous forme de liste de réels. Dans notre cas, on aurait pu écrire :
TB=VIBR PROCHE (PROG 8.8 29.4 43.8) RIGCL1 MAS1 TBAS IMPR ;L’algorithme est basé sur une méthode itérative avec pour valeurs propres de départ lesvaleurs précisées dans la liste de réels.
SIMULTANE : avec cette option, le calcul cherche de manière simultanée les NB fréquencespropres les plus basses. Cet algorithme permet de séparer les modes propres et fréquencesidentiques alors que les deux méthodes précédentes ne le permettent pas.Sur notre exemple :
TBS=VIBR SIMULTANEE TB NB RIGCL1 MAS1 ‘TBAS’ IMPR ;
Dans tous les cas l’opérateur VIBR(ATION) utili se les matrices de rigidité et de masse.L’option TBAS signifie que les résultats seront écrits dans une table que nous allons présenterpar la suite. L’option IMPR implique que les messages de calcul seront aff ichés à l’écran,pendant le déroulement de la procédure.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
33
Pour finir de présenter l’opérateur VIBR(ATION), et pour pouvoir comprendre la suite dufichier, il est nécessaire de décrire la table dans laquelle sont stockés les résultats.
L’organisation de la table est la suivante :
Tab le d e sortie d e l'op é rateu r V IB R = TB
M aillag e
TB .M O D E S .M A IL L A G E
TB .M O D E S .1.D E FO R M E E -M O D A L E
TB .M O D E S .1.N U M E R O -M O D E
TB .M O D E S .1.FR E Q U E N C E
TB .M O D E S .1d e sou s-typ e M O D E
...
TB .M O D E S .2d e sou s-typ e M O D E
TBd e sou s-typ e B A S E -M O D A L E
c) Post-traitement :
NMOD=3 ;I=0 ;REPETER BLOC1 NMOD ;
I=I+1 ;FRQ=TB.MODES.I. FREQUENCE ;NUM=TB.MODES.I. NUMERO_MODE ;TITRE ‘DEFORMEE MODALE’ NUM ‘FREQUENCE’ FRQ ;CHP1=TB.MODES.I. DEFORMEE_MODALE ;DEF0=DEFO PORTIQ1 CHP1 0. BLAN ;DEF1=DEFO PORTIQ1 CHP1 ROUG ;TRAC OEIL (DEF0 ET DEF1) ;
FIN BLOC1 ;
L’objet de ce post - traitement des résultats est de visualiser les déformées quicorrespondent aux modes propres calculés. Pour cela deux notions sont à préciser :
- l’utilisation des boucles REPETER- la lecture de valeurs dans la table de résultats.
La boucle présentée permet d’effectuer un certain nombre d’opérations contenues dansun bloc un certain nombre de fois (N). La syntaxe est :
REPETER BLOC N ;...FIN BLOC ;
Cette syntaxe est classique .

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
34
Une autre manière de procéder, plus subtile, serait de dire « faire la boucle tant qu’ il y a desfréquences à étudier ».Ce qui peut s’écrire :
I=1 ;REPETER BLOC1 ;SI (EXISTE (TB.MODES) I) ;...SINON ;QUITTER BLOC1 ;FINSI ;I=I+1FIN BLOC1
La lecture des résultats dans la table s'effectue de la manière suivante : dans FRQ onrécupère la fréquence du mode I de la table TB, dans NUM on récupère le numéro du mode Ide la table TB et dans CHP1 on récupère la déformée modale du mode I de la table TB.
On ne reviendra pas sur le tracé des déformées.Les déformées obtenues sont présentées sur les figures II-7, II-8 et II-9.
DEFORMEE MODALE 1 FREQUENCE 8.7821
AMPLITUDE
0.00E+00 .13
Figure II-7 : Déformée du mode 1

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
35
DEFORMEE MODALE 2 FREQUENCE 29.442
AMPLITUDE
0.00E+00 .43
Figure II-8 : Déformée du mode 2
DEFORMEE MODALE 3 FREQUENCE 43.850
AMPLITUDE
0.00E+00 .38
Figure II-9 : Déformée du mode 3

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
36
III. Calculs thermo-mécaniques
III.1. Générali tés concernant les ca lculs thermiques
Une analogie formelle peut être faite entre le calcul thermique et le calcul mécanique. Cecipermet de passer facilement des calculs mécaniques aux calculs thermiques.L’analogie est la suivante :
MECANIQUE THERMIQUEMatrice de rigidité [K] Matrice de conductivité [Λ ]Matrice de masse [M] Matrice de capacité [C]Vecteur déplacements généralisés {U} Vecteur températures {T}Vecteur forces généralisées {F} Vecteur flux nodaux {φ}
[K].{U} = {F} [Λ ].{T} = { φ}
Les opérateurs CASTEM à utiliser sont :
COND : calcule la matrice de conductivité (analogue à RIGI).CAPA : calcule la matrice de capacité calorifique (analogue à MASS).CONV : permet d’imposer une condition de convection forcée sur une partie du
contour d’une structure (analogue à FORC).
Les conditions aux limites sont fixées comme pour les calculs mécaniques par BLOQ etDEPI.
III.2. Exemple de calcul thermique
III.2.1. Présentation de l’exemple
L’objectif de l’exemple est de calculer l’état stabili sé d’un transfert de chaleur avecconvection en deux dimensions . Le modèle est le suivant :
D C
1. m * E
0.2 mA B
0.6 mavec :
sur AB : température imposée à 100°Csur BC et CD : convection avec température extérieure de 0°Csur DA : droite isolée pas de convection.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
37
On cherche la carte de température sur l’ensemble de la structure et la température du point E.On effectuera également un calcul d'erreur en comparant la solution obtenue à une solution deréférence.
III.2.2. Proposition de solution** DEBUT DU FICHIER THERM1.DGIBI*TITR ‘TRANSFERT DE CHALEUR AVEC CONVECTION EN 2 D’ ;OPTI DIME 2 ELEM QUA8 MODE PLAN;** GEOMETRIE** POINTSA = 0. 0. ;B = 0.6 0. ;C = 0.6 1.0 ;D = 0. 1.0 ;* LIGNESNELEM1=5 ;NELEM2=3 ;AB=A DROI NELEM2 B ;BC=B DROI NELEM1 C ;CD=C DROI NELEM2 D ;DA=D DROI NELEM1 A ;* SURFACESURF1=DALL AB BC CD DA PLAN ;* VISUALISATIONTITR ‘THERM1 MAILLAGE’ ;TRAC QUAL SURF1 ;** CHOIX DU COMPORTEMENT ET DU MODELE EF*MO1=MODE SURF1 THERMIQUE ISOTROPE QUA8 ;MO2=MODE (BC ET CD) CONVECTION ;** DONNEES MATERIAU ET ELEMENTS*MAT1=MATE MO1 K 52.0 ;MAT2=MATE MO2 H 750.0 ;** CONDITIONS AUX LIMITES*CL1=BLOQ AB T ;FCL1=DEPI CL1 100. ;** CHARGEMENT (FLUX)*FLU1=CONV MO2 MAT2 T 0. ;** RESOLUTION** MATRICES DE CONDUCTIVITECOND1=COND MO1 MAT1 ;COND2=COND MO2 MAT2 ;CONDTOT=COND1 ET COND2 ET CL1 ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
38
* FLUXFLUTOT=FCL1 ET FLU1 ;* RESOLUTIONCHPO1=RESO CONDTOT FLUTOT ;** POST-TRAITEMENT*TITR ‘THERM1 TEMPERATURES’ ;TRAC CHPO1 SURF1 ;*PE=SURF1 POIN PROC (0.6 0.2) 0.01;TE1=EXTR CHPO1 T PE ;TE0=18.3 ;ERREUR1=100*(ABS((TE1-TE0)/TE0)) ;MESS ‘TEMPERATURE THEORIQUE EN E : ‘ TE0 ;MESS ‘TEMPERATURE CALCULEE EN E : ‘ TE1 ;MESS ‘SOIT UNE ERREUR DE : ‘ ERREUR1 ‘%’ ;** FIN DU FICHIER*FIN ;*
III.2.3. Analyse de la solution proposée
a) Géométrie :
Nous ne reviendrons pas sur la construction du maillage. Notons simplement que l’on obtientfinalement le maillage présenté sur la figure III-1:
THERM1 MAILLAGE
D C
A BAB
BC
CD
DA SURF1
Figure III-1 : Géométrie - Maillage du modèle

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
39
b) Choix du comportement et des éléments :
MO1=MODE SURF1 THERMIQUE ISOTROPE QUA8 ;
On définit un premier objet de type MMODEL relatif à l’ensemble de la structure et à uncomportement thermique isotrope.
MO2=MODE (BC ET CD) CONVECTION ;
On définit un second objet de type MMODEL pour préciser le comportement de convectiondes côtés BC et CD.
c) Données matériau et éléments :
MAT1=MATE MO1 K 52.0 ;
Pour le modèle thermique isotrope, il convient de préciser la conductivité isotrope K.
MAT2=MATE MO2 H 750.0 ;
Pour le phénomène de convection, il convient de préciser le coefficient d'échange H.
d) Conditions aux limites :
CL1=BLOQ AB T ;FCL1=DEPI CL1 100. ;
On veut fixer à 100°C la température sur le côté AB. Dans un premier temps on crée un objetde type conductivité (CL1) pour signaler que la température (T) est fixée sur AB. Dans unsecond temps on crée un objet de type flux (FCL1) pour préciser la valeur à laquelle latempérature est fixée.
e) Chargement :
FLU1=CONV MO2 MAT2 T 0. ;
Le seul flux de chargement est le flux de convection sur les côtés BC et CD défini par le faitque la température à l’ infini vaut 0°C. L’opérateur CONV permet de créer ce flux deconvection forcée.
f) Résolution :
COND1=COND MO1 MAT1 ;COND2=COND MO2 MAT2 ;CONDTOT=COND1 ET COND2 ET CL1 ;
On construit la matrice de conductivité totale qui tient compte :- de la conductivité du modèle thermique isotrope sur l’ensemble de la structure- de la conductivité du modèle de convection sur BC et CD- des conditions aux limites de températures bloquées (CL1).

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
40
FLUTOT=FCL1 ET FLU1 ;
On construit le vecteur flux (second terme du système à résoudre) en prenant en compte :
- la température imposée sur AB (FCL1)- le flux de convection sur BC et CD (FLU1).
CHPO1=RESO CONDTOT FLUTOT ;
On résout le système [Λ ].{T} ={ φ}, avec l’opérateur RESO(UDRE) que l’on utili se aussi enmécanique. L’objet solution est du type champ par point, il contient la température de chaquepoint.
g) Post - traitement :
TITR ‘THERM1 TEMPERATURES’ ;TRAC CHPO1 SURF1 ;
On trace le champ de températures sur la structure.Le résultat obtenu est présenté sur la figure III-2.
THERM1 TEMPERATURES
VAL - ISO
A 4.1B 11.C 18.D 25.E 33.F 40.G 47.H 54.I 61.J 68.K 75.L 82.M 89.N 96.
Figure III-2 : Cartographie des températures

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
41
PE=SURF1 POIN PROC (0.6 0.2) 0.01;
On veut maintenant obtenir la température au point E. La première chose à faire est dedéterminer le point du maill age le plus proche de E. Pour cela on utili se l’opérateur POIN(T)avec l’option PROC(HE).L’opérateur POIN(T) extrait de la géométrie spécifiée un ou plusieurs points.Avec l’option PROC(HE) il recherche un point près des coordonnées spécifiées avec uneprécision à indiquer (ici 0.01).
TE1=EXTR CHPO1 T PE ;
On extrait à l’aide de l’opérateur EXTR(AIRE) la valeur de la température (T) au point PEdans le champ par point des températures (CHPO1).
TE0=18.3 ;
On fixe une solution de référence, calculée analytiquement.
ERREUR1=100*(ABS((TE1-TE0)/TE0)) ;
On calcule l’erreur entre la valeur de référence et la valeur calculée.On note au passage que l’on peut effectuer un calcul quelconque au sein d’un jeu de donnéesGIBIANE. Il faudra toutefois faire attention à bien placer les parenthèses de manière à vérifierl’ordre des calculs mathématiques (cf I-1-2).
MESS ‘TEMPERATURE THEORIQUE EN E :’ TE0 ;MESS ‘TEMPERATURE CALCULEE EN E : ‘ TE1 ;MESS ‘SOIT UNE ERREUR DE : ‘ ERREUR1 ‘%’ ;
On affiche les valeurs de référence et calculée, ainsi que la différence relative.On obtient :
TEMPERATURE THEORIQUE EN E : 18.300
TEMPERATURE CALCULEE EN E : 17.895
SOIT UNE ERREUR DE : 2.2135 %
Pour obtenir une meilleure précision, il aurait fallu faire un maillage plus dense.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
42
III.3. Exemple de calcul thermo-mécanique
III.3.1. Présentation de l'exemple
Les variations spatiales de température, comme celles que l’on a pu observer dansl’exemple précédent peuvent être à l’origine de contraintes thermiques dues au besoin dedilatation de la structure. Il est donc parfois intéressant de mener un calcul thermo-mécanique,où les contraintes thermiques et mécaniques sont également prises en compte.
Le déroulement de ce type de calcul est le suivant :
- calcul thermique pour obtenir la distribution de température dans la structure. C’est lecalcul de l’exemple précédent.
- calcul mécanique avec prise en compte du chargement thermique que l’on calcule à partir des résultats du calcul thermique.
Pour ill ustrer l'aspect thermo-mécanique, nous allons traiter un exemple bâti autour du casprécédent, ce qui nous permettra de ne pas revenir sur la phase de calcul purement thermique.
On reprend la structure précédente :
D C
1. m
A B 0.6 m
avec : sur AB : température imposée à 100°Csur BC et CD : convection avec température à l’infini de 0°Csur DA : droite isolée pas de convection
et on ajoute les conditions mécaniques suivantes :AB et CD : encastrésDA : pression imposée
On cherche la déformée de la structure ainsi que la répartition de contraintes.
III.3.2. Proposition de solution** DEBUT DU FICHIER THERMECA1.DGIBI*TITR ‘CALCUL THERMO-MECANIQUE’ ;OPTI DIME 2 ELEM QUA8 MODE PLAN CONT;** GEOMETRIE*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
43
* POINTSA = 0. 0. ;B = 0.6 0. ;C = 0.6 1.0 ;D = 0. 1.0 ;* LIGNESNELEM1=10 ;NELEM2=6 ;AB=A DROI NELEM2 B ;BC=B DROI NELEM1 C ;CD=C DROI NELEM2 D ;DA=D DROI NELEM1 A ;* SURFACESURF1=DALL AB BC CD DA PLAN ;* VISUALISATIONTITR ‘THERMECA1 MAILLAGE’ ;TRAC QUAL SURF1 ;**---------------------------------------------------------------------* CALCUL THERMIQUE*---------------------------------------------------------------------** CHOIX DU COMPORTEMENT ET DU MODELE EF*MO1=MODE SURF1 THERMIQUE ISOTROPE QUA8 ;MO2=MODE (BC ET CD) CONVECTION ;** DONNEES MATERIAU ET ELEMENTS*MAT1=MATE MO1 K 52.0 ;MAT2=MATE MO2 H 750.0 ;** CONDITIONS AUX LIMITES*CL1=BLOQ AB T ;FCL1=DEPI CL1 100. ;** CHARGEMENT (FLUX)*FLU1=CONV MO2 MAT2 T 0. ;** RESOLUTION** MATRICES DE CONDUCTIVITECOND1=COND MO1 MAT1 ;CON2=COND MO2 MAT2 ;CONDTOT=COND1 ET COND2 ET CL1 ;* FLUXFLUTOT=FCL1 ET FLU1 ;* RESOLUTIONCHPO1=RESO CONDTOT FLUTOT ;** POST-TRAITEMENT*TITR ‘THERMECA1 TEMPERATURES (MAXI= ‘ (MAXI CHPO1) ‘ )’ ;TRAC CHPO1 SURF1 ;*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
44
*---------------------------------------------------------------------------------------------* CALCUL MECANIQUE*---------------------------------------------------------------------------------------------** CHOIX DU COMPORTEMENT ET DU MODELE EF*MO3=MODE SURF1 MECANIQUE ELASTIQUE ISOTROPE QUA8 ;** DONNEES MATERIAU ET ELEMENTS*MAT3=MATE MO3 YOUN 2.E11 NU 0.3 RHO 7800. ALPH 1.E-5 ;** CONDITIONS AUX LIMITES*CL3=BLOQ DEPL (AB ET CD) ;** CHARGEMENT THERMIQUE ET PRESSION*SIGT3=THET MO3 CHPO1 MAT3 ;F3=BSIG MO3 SIGT3 ;PRES3=PRES MASS MO3 100.E6 DA ;** RESOLUTION*RIG3=RIGI MO3 MAT3 ;RIGCL3=RIG3 ET CL3 ;DEP3=RESO RIGCL3 (F3 ET PRES3) ;** POST-TRAITEMENT** DEFORMEEDEF0=DEFO SURF1 DEP3 0. BLAN ;DEF1=DEFO SURF1 DEP3 ROUG ;TITR ‘THERMECA1 DEFORMEE’ ;TRAC (DEF0 ET DEF1) ;** CALCUL DES CONTRAINTES TOTALES ET MECANIQUESSIGTOT3=SIGM MO3 MAT3 DEP3 ;SIGM3=SIGTOT3 - SIGT3 ;** CHAMPS DE CONTRAINTESS_XX=(EXCO ‘SMXX’ SIGM3)/1.E6 ;TITR ‘CONTRAINTES S_XX (MAXI= ‘ (MAXI S_XX) ‘ MPa)’ ;TRAC MO3 S_XX ;S_YY=(EXCO ‘SMYY’ SIGM3)/1.E6 ;TITR ‘CONTRAINTES S_YY (MAXI= ‘ (MAXI S_YY) ‘ MPa)’ ;TRAC MO3 S_YY ;VM=(VMIS MO3 SIGM3)/1.E6 ;TITR ‘CONTRAINTES DE VON MISES (MAXI= ‘ (MAXI VM) ‘ MPa) ‘ ;TRAC MO3 VM ;** FIN DU FICHIER*FIN ;*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
45
III.3.3. Analyse de la solution proposée
a) Géométrie :
On ne revient pas sur la construction géométrique du modèle.Le maillage obtenu est présenté sur la figure III-3.
THERM1 MAILLAGE
D C
A BAB
BC
CD
DA SURF1
Figure III-3 : Géométrie - Maillage
b) Calcul thermique :
Le calcul thermique est le même que celui de l’exemple précédent.On notera simplement au niveau du post - traitement l’utilisation de l’opérateur MAXI(MUM)qui fournit la composante maximale d’un objet.La distribution de température obtenue est présentée sur la figure III-4.
THERM1 TEMPERATURES
VAL - ISO
A 4.1B 11.C 18.D 25.E 33.F 40.G 47.H 54.I 61.J 68.K 75.L 82.M 89.N 96.
Figure III-4 : Cartographie des températures

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
46
Passons maintenant à l’étude mécanique du problème.
c) Choix du comportement et du modèle E.F :
MO3=MODE SURF1 MECANIQUE ELASTIQUE ISOTROPE QUA8 ;On définit un troisième objet de type MMODEL pour caractériser le comportementmécanique de la structure.
d) Données matériau et éléments :
MAT3=MATE MO3 YOUN 2.E11 NU 0.3 RHO 7800. ALPH 1.E-5 ;On retrouve les caractéristiques habituelles d’un calcul mécanique, on notera cependant lecoefficient de dilatation ALPH.
e) Conditions aux limites :
CL3=BLOQ DEPL (AB ET CD) ;Encastrement sur AB et CD.
f) Chargement :
SIGT3=THET MO3 CHPO1 MAT3 ;L’opérateur THET calcule les contraintes associées à un champ de température.Il a besoin pour cela d’avoir le champ de températures, le modèle et les caractéristiques dumodèle. On aurait également pu écrire : EPSIT = EPTH MO3 CHPOI MAT3 ;
SIGT3 = ELAS MO3 EPSIT MAT3 ;L’opérateur EPTH calcule les déformations d’origine thermique associées à un champs detempératures et ELAS calcule les contraintes à partir de déformations ou inversement, dansl’hypothèse d’un matériau élastique.
F3=BSIG MO3 SIGT3 ;L’opérateur BSIG calcule le champ de forces nodales résultant de l’intégration d’un champ decontraintes. On constitue ainsi un champ de forces thermiques.
PRES3=PRES MASS MO3 100.E6 DA ;Nous avons déjà vu l’opérateur PRES(SION) qui calcule les forces nodales équivalentes à unepression dans le cas des coques. Ici on n’a pas d’éléments de type COQ mais des élémentsmassifs, l’option de PRES est alors MASS(IF).
g) Résolution :
RIG3=RIGI MO3 MAT3 ;RIGCL3=RIG3 ET CL3 ;DEP3=RESO RIGCL3 (F3 ET PRES3) ;La résolution est classique. On construit la matrice de rigidité avec l’opérateur RIGI. On inclutles conditions aux limites dans la rigidité. Et finalement on résout avec RESO le système{F}=[K]{U} en prenant compte dans les forces de la pression et des forces thermiques.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
47
h) Post - traitement :
DEF0=DEFO SURF1 DEP3 0. BLAN ;DEF1=DEFO SURF1 DEP3 ROUG ;TITR= ‘THERMECA1 DEFORMEE’ ;TRAC (DEF0 ET DEF1) ;
Tracé classique de la déformée. Le résultat obtenu est présenté sur la figure III-5.
THERMECA1 DEFORMEE
AMPLITUDE
0.00E+00 2.17E+02
Figure III-5 : Déformée de la structure
La thermique agit en imposant en chaque point une déformation EPSIT = α.T. En notantEPSTOT la déformation correspondant au déplacement, le calcul des contraintes est donc :
σ = D.(EPSTOT-EPSIT)Il est donc possible de procéder en deux temps : calcul de D*EPSTOT et on lui retrancheD*EPSIT.
SIGTOT3=SIGM MO3 MAT3 DEP3 ;
L’opérateur SIGM calcule le champ de contraintes à partir d’un champ de déplacements. Onobtient donc le champ de contraintes totales (thermiques et mécaniques).
SIGM3=SIGTOT3-SIGT3 ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
48
S_XX=(EXCO ‘SMXX’ SIGM3)/I.E6 ;
On extrait du champ de contraintes mécaniques la composante σxx , par le biais de l’opérateurEXCO. On met ensuite cette contrainte en MPa.Il ne faut pas confondre les trois opérateurs EXTR, EXCO et REDU.
EXTR : extrait d’un objet un autre objet (par exemple un déplacement en un point suivant une direction dans un champ de déplacement).
EXCO : extrait une ou plusieurs composantes d’un champ (par exemple ici les contraintes σxx dans le champ de contraintes global).
REDU : réduit un champ par éléments ou un champ par points à un support donné (parexemple l’ensemble des contraintes du côté AB dans l’ensemble des contraintes de la structure).
TITR ‘CONTRAINTES S_XX (MAXI=‘(MAXI S_XX) ‘ MPa)’ ;TRAC MO3 S_XX ;
On trace les contraintes σxx sur le modèle MO3.Le résultat obtenu est présenté sur la figure III-6.
CONTRAINTES S_XX (MAXI = 30.445 MPa)
VAL - ISO
A-5.10E+02B-4.67E+02C-4.25E+02D-3.82E+02E-3.40E+02F-2.98E+02G-2.55E+02H-2.13E+02I -1.70E+02J -1.28E+02K -85.L -43.M -.41N 42.
Figure III-6 : Contraintes σxx

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
49
S_YY=(EXCO ‘SMYY’ SIGM3)/I.E6 ;TITR ‘CONTRAINTES S_YY (MAXI=‘(MAXI S_YY) ‘ MPa)’ ;TRAC MO3 S_YY ;
Même opérations avec σyy qu’avec σxx .Le résultat obtenu est présenté sur la figure III-7.
CONTRAINTES S_YY (MAXI = 48.437 MPa)
VAL - ISO
A-5.48E+02B-5.01E+02C-4.54E+02D-4.06E+02E-3.59E+02F-3.11E+02G-2.64E+02H-2.16E+02I -1.69E+02J -1.21E+02K -74.L -27.M 21.N 68.
Figure III-7 : Contraintes σyy
VM=(VMIS MO3 SIGM3)/I.E6 ;
L’opérateur VMIS calcule une contrainte équivalente à un champ de contraintes. Dans les casmassifs (2D et 3D) elle coïncide avec la contrainte de Von Mises.
TITR ‘CONTRAINTES DE VON MISES (MAXI=‘(MAXI VM)’MPa)’ ;TRAC MO3 VM ;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
50
On trace les contraintes de Von Mises sur le modèle MO3.Le résultat obtenu est présenté sur la figure III-8.
CONTRAINTES DE VON MISES (MAXI = 467.35 MPa)
VAL - ISO
A 26.B 66.C 1.06E+02D 1.46E+02E 1.86E+02F 2.26E+02G 2.66E+02H 3.07E+02I 3.47E+02J 3.87E+02K 4.27E+02L 4.67E+02M 5.07E+02N 5.47E+02
Figure III-8 : Contraintes de Von Mises
Nous avons vu dans cet exemple, les opérateurs de post - traitement SIGM et VMIS. D’autresopérateurs sont disponibles. Citons entre autres :
- EPSI : qui calcule le tenseur des déformations à partir du champ de déplacements- REAC : qui calcule les réactions au niveau des blocages dans un système statique- TRES : qui calcule les contraintes équivalentes selon le critère de Tresca.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
51
IV. Calculs non linéaires
IV.1. Générali tés concernant les ca lculs non linéaires
Nous ne traiterons pas de manière exhaustive les possibilit és de calcul non-linéaire decastem. Nous présenterons simplement l’opérateur principal et nous ill ustrerons son utili sationsur un exemple de calcul élasto-plastique.Les calculs non linéaires sont effectués avec l’opérateur PASAPAS.En mécanique, ce dernier permet d’effectuer des calculs linéaires incrémentaux. La non-linéarité peut provenir du matériau (plasticité), des grands déplacements ou des deux à la fois.Les résultats sont calculés à des valeurs du paramètre d’évolution (pseudo temps ou tempsréel) définies par l’utili sateur. En thermique, cet opérateur permet d’effectuer des calculs non-linéaires tenant compte de la conduction, de la convection et du rayonnement. Il est parailleurs possible d’effectuer des calculs couplés thermo-mécaniques.La syntaxe de cet opérateur est :
PASAPAS TAB1 ;
où TAB1 est une table qui permet de définir les options et les paramètres du calcul. Lesindices de l’objet TAB1 sont présentés en annexe 5.
IV.2. Calcul élasto-plastique
IV.2.1. Objectif du calcul
L’objet de ce calcul est d’étudier une plaque en flexion en comportement élasto-plastique.Une plaque de 20 mm de largeur par 60 mm de hauteur est encastrée à une extrémité et subitune force fléchissante sur le coté opposé. Le modèle obtenu est le suivant :
Force20 mm
60 mm

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
52
Les caractéristiques de l’acier constituant la plaque seront entrées par le biais d’une courbe detraction expérimentale.La force appliquée va augmenter jusqu'à 1000 N puis va être relâchée jusqu'à une force nulle.Dans un post-traitement des résultats, nous étudierons les contraintes de Von Mises, lesdéformations inélastiques et les déformations de la plaque. Ceci nous permettra de concluresur la plastification de la structure.
IV.2.2. Proposition de solution** FICHIER JSPLAS1.DGIBI* TITR 'PLAQUE EN FLEXION'; OPTI DIME 2 ELEM QUA8 MODE PLAN CONT; OPTI ECHO 1 ; GRAPH = 'O' ;** GEOMETRIE* P1 = 0. 0.; P2 = 20. 0.; P3 = 20. 60.; P4 = 0. 60.; L12 = P1 DROI 10 P2; L23 = P2 DROI 30 P3; L34 = P3 DROI 10 P4; L41 = P4 DROI 30 P1; SURF1 = DALL L12 L23 L34 L41; SI(NEG GRAPH 'N'); TRACE QUAL SURF1 ; FINSI;** CHOIX DU COMPORTEMENT ET DU MODELE EF* MO1 = MODE SURF1 MECANIQUE ELASTIQUE PLASTIQUE ISOTROPE QUA8;** DONNEES MATERIAU ET ELEMENTS* LISE1 = prog 0.0 0.250e-2 0.270e-2 0.300e-2 0.370e-2 0.470e-2 0.500e-2 0.750e-2 1.540e-2 2.730e-2 4.160e-2 5.710e-2 7.370e-2 9.120e-2 10.98e-2 13.02e-2 15.21e-2 17.18e-2 19.65e-2 22.10e-2 24.80e-2 28.00e-2; LISC1 = prog 0.0 450 460 470 480 485 490 500 520 540 560 580 600 620 640 660 680 700 720 740 760 780; EVOL1 = EVOL MANU 'deformations' LISE1 'contraintes' LISC1; MAT1 = MATE MO1 YOUN 180000. TRAC EVOL1 NU 0.3 ; SI(NEG GRAPH 'N'); DESS EVOL1 ; FINSI;** CONDITIONS AUX LIMITES* CL1 = BLOQ L12 DEPL;

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
53
** CHARGEMENT* FO1 = FORC (100 0) L34; LIST1 = PROG 0 PAS 1. 20.; LISF1 = PROG 0 PAS 1. 10. PAS -1. 0.; EVF1 = EVOL MANU 'temps' LIST1 'force' LISF1; CHA1 = CHAR 'MECA' FO1 EVF1; SI(NEG GRAPH 'N'); DESS (EVF1*100.) ; FINSI;** CALCUL PAS A PAS*TAB1 = TABLE;TAB1.'BLOCAGES_MECANIQUES' = CL1;TAB1.'MODELE' = MO1;TAB1.'CHARGEMENT' = CHA1;TAB1.'CARACTERISTIQUES' = MAT1;TAB1.'TEMPS_CALCULES' = LIST1;TAB1.'GRANDS_DEPLACEMENTS'=VRAI;PASAPAS TAB1;** FIN DU FICHIER*OPTI SAUV '/test4/pica/fleuret/jsplas1.sortgibi';SAUV TAB1;FIN;*
IV.2.3. Analyse de la solution proposée
a) Début du programme et géométrie
Nous ne reviendrons pas sur cette partie du calcul qui n’ajoute rien à ce que nous avons vudans les exemples précédents.Le maillage obtenu est présenté sur la figure IV-1.
PLAQUE EN FLEXION
P1 P2
P3P4
L12
L23
L34
L41 SURF1
Figure IV-1 : Géométrie-Maillage

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
54
b) Choix du comportement matériau et du modèle EF
MO1=MODE SURF1 MECANIQUE ELASTIQUE PLASTIQUE ISOTROPE QUA8 ;
On effectue un calcul élasto-plastique, on précise donc un comportement Mécanique ElastiquePlastique. CASTEM 2000 dispose de plusieurs modèles plastiques. Dans notre exemple nousavons choisi un modèle plastique ISOTROPE.
Enfin, nous choisissons un élément fini QUA8.
c) Données matériau et éléments :
LISE1=PROG....... ;LISC1=PROG........ ;EVOL1=EVOL MANU ‘déformations’ LISE1 ‘contraintes’ LISC1 ;
Tout d’abord, il convient de créer la courbe de traction sous forme d’un objet Evolution. Pourcela on définit deux listes avec l’opérateur PROG, puis on fabrique l’évolution qui va relierLISC1 à LISE1.
MAT1=MATE MO1 YOUN 180000. TRAC EVOL1 NU 0.3 ;
Les caractéristiques des matériaux rattachés au modèle MO1 sont entrées en précisant lemodule d’Young, le coeff icient de Poisson et la courbe de traction précédée du mot clefTRAC. Les valeurs à entrer dépendent du modèle de plasticité utili sé, il est important de sereporter à la notice de MATE pour vérifier ce point.
SI (NEG GRAPH ‘N’) ;DESS EVOL1 ;FINSI ;
Nous retrouvons la structure que nous avions vu dans le chapitre III -3-3, l’ idée ici est de netracer les dessins que si la variable GRAPH que l’on a défini au début du programme estdifférente de ‘N’.L’évolution représentant la courbe de traction du matériau est présentée sur la figure IV-2.
PLAQUE EN FLEXION
deformations
contraintes
.00 .05 .10 .15 .20 .25 .30
.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
X1.E2
Figure IV-2 courbe de traction

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
55
d) Conditions aux limites
CL1=BLOQ L12 DEPL ;On bloque tous les déplacements en y=0, c’est à dire sur la ligne L12.
e) Chargement
FO1=FORC (100 0.) L34 ;On définit un vecteur force avec l’opérateur FORC de valeur (100 0.) et appliqué sur lespoints de la ligne L34.
LIST1=PROG 0 PAS 1.20. ;On définit une liste de pseudo-temps allant de 0. à 20. par pas de 1. La liste contient donc 21éléments.
LISF1=PROG 0. PAS 1.10. PAS -1. 0. ;On définit une seconde liste représentant un facteur multiplicatif de la force et correspondant àla li ste de pseudo temps. On a donc également 21 valeurs allant de 0. à 10. Par pas de 1,puisrevenant à 0 par pas de -1.
EVF1=EVOL MANU ‘temps’ LIST1 ‘force’ LISF1 ;On crée un objet évolution représentant la variation du facteur multiplicatif de la force enfonction du temps.
CHA1=CHAR ‘MECA’ FO1 EUF1 ;On crée un chargement mécanique signifiant que la force réelle est le produit de FO1 par unfacteur multiplicatif qui varie en fonction du pseudo-temps selon l’évolution EVF1.
SI (NEG GRAPH ‘N’) ;DESS (EVF1*100) ;FINSI ;On trace l’évolution de la force suivant X si GRAPH est différent de ‘N’ . La courbe obtenueest présentée sur la figure IV-3.
PLAQUE EN FLEXION
temps
force
.00 5.00 10.00 15.00 20.00 25.00
.00
.20
.40
.60
.80
1.00
1.20
X1.E3
Figure IV-3 : Evolution de la force

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
56
f) Résolution
La résolution du calcul non linéaire se fait par le biais de la directive PASAPAS. Pourcela, il convient dans un premier temps de définir une table (TAB1). Puis il faut préciser lesoptions et les données nécessaires au calcul considéré. Il est pour cela nécessaire de sereporter à la notice de PASAPAS (cf annexe 5).Dans notre cas, il convient de préciser :
- les conditions aux limites (CL1)- le modèle (MO1)- le chargement (CHA1)- les caractéristiques des matériaux (MAT1)
Les temps représentant les itérations du calcul PASAPAS sont ici égaux aux temps duchargement (LIST1), mais cela n’est pas obligatoire. Le calcul PASAPAS va donc effectuerles calculs pour 21 pas de pseudo temps entre 0. et 20.Enfin, on précise que nous effectuerons le calcul dans l’hypothèse des grands déplacements.Les résultats obtenus sont stockés dans la table TAB1.
g) Sauvegarde
Un calcul PASAPAS peut être assez long. Il est donc parfois utile de sauvegarder la tablecontenant la majorité des données et les résultats, et de faire un post-traitement par la suite àpartir du fichier de sauvegarde de la table. Ceci permet de modifier le post-traitement sansrelancer le calcul PASAPAS.
Pour cela, il convient de préciser le nom du fichier de sauvegarde :OPTI SAUV ‘test 4/préa/fleuret/Japlas1.sortgibi’ ;Puis on sauve les objets qui nous intéressent (ici la table TAB1) :SAUV TAB1 ;Le post-traitement est effectué par la suite à partir d’un autre fichier de données gibiane.
IV.2.4. Proposition de solution pour le post-traitement
** fichier de post - traitement des resultats de jsplas1.sortgibi*OPTI REST '/test4/pica/fleuret/jsplas1.sortgibi';REST;**--- point de chargement*PCHAR = 10;PFINAL = 20;**--- contraintes*SIGMA1 = TAB1.'CONTRAINTES'.PCHAR;SIGMAV1 = VMIS SIGMA1 TAB1.'MODELE';TITR 'CONTRAINTES DE VON MISES';TRAC SIGMAV1 TAB1.'MODELE';*

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
57
*--- deformations inelastiques*VAR1 = TAB1.'VARIABLES_INTERNES'.PCHAR;DINE1 = EXCO VAR1 'EPSE';TITR 'DEFORMATIONS INELASTIQUES';TRAC DINE1 TAB1.'MODELE';**--- deplacements*GEOTOT = EXTR TAB1.'MODELE' 'MAIL';DEP1 = TAB1.'DEPLACEMENTS'.PCHAR;DEP2 = TAB1.'DEPLACEMENTS'.PFINAL;DEF0 = DEFO GEOTOT DEP1 0. BLAN;DEF1 = DEFO GEOTOT DEP1 20. ROUG;DEF2 = DEFO GEOTOT DEP2 20. ROUG;TITR 'DEPLACEMENTS EN FIN DE CHARGE';TRAC (DEF0 ET DEF1);TITR 'DEPLACEMENTS APRES RELACHE';TRAC (DEF0 ET DEF2);** FIN DU FICHIER*FIN;**
IV.2.5. Analyse de la solution de post-traitement proposée
a) Restitution
OPTI REST ‘/test 4/pica/fleuret/jsplas1.sortgibi’ ;On précise le nom du fichier à utiliser pour la restitution.
REST ;On restitue les données sauvegardées dans le fichier.
b) Point de chargement
PCHAR=10 ;PFINAL=20 ;On va se situer à deux moments du chargement :
-au moment où la force est maximale (PCHAR).-après avoir remis la force à zéro (PFINAL).
c) Contraintes
SIGMA1=TAB1. ‘CONTRAINTES’.PCHAR ;On récupère les contraintes de la table TAB1 pour le temps PCHAR.
SIGMAV1=VMIS SIGMA1 TAB1. ‘MODELE’ ;On calcule les contraintes de Von Mises à partir des contraintes SIGMA1 et du modèle de lastructure que l’on récupère dans TAB1.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
58
TITR ‘CONTRAINTES DE VON MISES’ ;TRAC SIGMAV1 TAB1. ‘MODELE’ ;On trace les contraintes de Von Mises à l’aide de la directive TRAC en précisant le modèle, etaprès avoir donné un nom au dessin. La figure obtenue est présentée sur la figure IV-4.
CONTRAINTES DE VON MISES
VAL - ISO
A 9.0B 47.C 84.D 1.22E+02E 1.60E+02F 1.97E+02G 2.35E+02H 2.73E+02I 3.11E+02J 3.48E+02K 3.86E+02L 4.24E+02M 4.61E+02N 4.99E+02
Figure IV-4 : contraintes de Von Mises
d) Déformations inélastiques :
VAR1=TAB1.’VARIABLES_INTERNES’.PCHAR ;DINE1=EXCO VAR1 ‘EPSE’ ;
On tire de la table TAB1 les variables internes associées au temps de chargement PCHAR,puis on extrait de ces variables la composante EPSE qui représente les déformationsinélastiques.
TITR ‘DEFORMATIONS INELASTIQUES’ ;TRAC DINE1 TAB1.’MODELE’ ;On trace la courbe des déformations inélastiques sur le modèle de plaque. La figure obtenue(figure IV-5) permet de mettre en évidence les zones de plastification.
DEFORMATIONS INELASTIQUES
VAL - ISO
A-1.11E-05B 6.93E-04C 1.40E-03D 2.10E-03E 2.81E-03F 3.51E-03G 4.21E-03H 4.92E-03I 5.62E-03J 6.33E-03K 7.03E-03L 7.74E-03M 8.44E-03N 9.14E-03
Figure IV-5 : déformations inélastiques

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
59
e) déplacements
GEOTOT=EXTR TAB1. ‘MODELE’ ‘MAIL’ ;On récupère le maill age de la structure à partir du modèle avec l’opérateur EXTR associé àl’option MAIL.
DEP1=TAB1. ‘DEPLACEMENTS’. PCHAR ;DEP2=TAB1. ‘DEPLACEMENTS’. PFINAL ;On tire de la table TAB1 les déplacements qui correspond aux instants PCHAR et PFINAL.
L’obtention des déformées ainsi que leur dessin a déjà été étudié dans les exemplesprécédents. Les dessins obtenus sont présentés sur les figures IV-6 et IV-7 .
DEPLACEMENTS EN FIN DE CHARGE
AMPLITUDE
0.00E+00 20.
Figure IV-6 : Déformée en chargement maximal
DEPLACEMENTS APRES RELACHE
AMPLITUDE
0.00E+00 20.
Figure IV-7 : Déformée après relâchement de l’effort
On remarque qu’au temps pfinal la plaque n’est pas revenue à sa position initiale, ce quimontre qu’il y a eu plastification.

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
60
LEXIQUE
A
AXIS.....................................................................25axisymétrique.......................................................24
B
BLOQ...................................................................36BSIG.....................................................................46
C
CACH...................................................................12calcul élasto-plastique..........................................54calcul mécanique linéaire.....................................19calcul non-linéaire................................................51calcul thermique...................................................36calcul thermo-mécanique......................................42CAPA...................................................................36Castem 2000...........................................................4CER3....................................................................10CERC.............................................................10; 25Champs par élément...............................................5Champs par point....................................................5chargement...........................................................22coefficient de dilatation........................................46coefficient d'échange............................................39comportement du matériau...................................26COND...................................................................36conditions aux limites.....................................21; 26conductivité..........................................................39contraintes thermiques..........................................42CONV...................................................................36convection......................................................36; 39COQU...................................................................27COURBE..............................................................10courbe de traction.................................................52CUBP...................................................................10CUBT...................................................................10
D
DALL .............................................................10; 15DEFO...................................................................23déformations inélastiques.....................................58DENS...................................................................13densité...................................................................12DEPI.....................................................................36DIME....................................................................10directives................................................................4DROI....................................................................10
E
élasto-plastique.....................................................51ELIM ....................................................................18
élimination............................................................16EPAI.....................................................................26EPSI.....................................................................50EVOL.....................................................................6Evolution..............................................................54évolution................................................................. 6EXCO...................................................................48EXTR.......................................................22; 41; 48
F
facteur d'amplification..........................................29flux .......................................................................40force.....................................................................24force radiale..........................................................28
G
Gibiane...................................................................4grands déplacements.............................................51
I
IMPR....................................................................32INTERSECTION.................................................10INTERVALLE .....................................................32
L
LECT......................................................................6lignes......................................................................9LIST .......................................................................5liste.........................................................................6
M
Maillage.................................................................. 9MASS...................................................................27MATE .................................................................. 21MAXI ...................................................................45MODE............................................................10; 20modes propres......................................................30
N
NORM.................................................................. 27
O
objets......................................................................5opérandes...............................................................4opérateurs...........................................................4; 7OPTI.....................................................................10
P
PARA...................................................................10PASAPAS......................................................51; 56plasticité...............................................................51poids propre....................................................24; 28

PRISE EN MAIN DE CASTEM 2000 PAR L’EXEMPLE
61
point de vue..........................................................17points......................................................................9PRES..............................................................27; 46pression interne...............................................24; 27PROCHE..............................................................32PROG.....................................................................6pseudo-temps........................................................55
Q
QUAL...................................................................11QUELCONQUE...................................................10
R
REAC...................................................................50REDU...................................................................48REGL...................................................................10règles syntaxiques...................................................4REPETER............................................................33RESO....................................................................23RIGI......................................................................22ROTA...................................................................10
S
SIGM....................................................................47
SIMULTANE.......................................................32surfaces...................................................................9
T
TABL .....................................................................7table........................................................................7température...........................................................41THET ...................................................................46TRAC.............................................................11; 23TRAN...................................................................10TRES....................................................................50
U
unités......................................................................8
V
VECT...................................................................27VIBR ....................................................................32VMIS....................................................................49VOLU...................................................................11volumes.................................................................. 9Von Mises................................................49; 52; 57

CLASSIFICATION DES OBJETS
Les différents objets utili sés dans CASTEM 2000 peuvent stocker des informations de natures trèsdifférentes (nombres entiers ou flottants, mots, maill ages, matrices, champs, etc...). Lors d’une exécution deCASTEM 2000, on peut à tout instant regarder le type des objets en utilisant la directive LIST.
Objets d’intérêt général
ENTIER entierFLOTTANT flottantLISTENTI liste d’entiersLISTREEL liste de flottantsMOT motLOGIQUE logiqueLISTMOTS liste des motsTABLE ensemble d’objets indicé par un ensemble d’objetsEVOLUTION représentation d’une fonction réelle par une suite de couples x, f(x)NUAGE ensemble de M. N_uplets
Objets de maillage
POINT coordonnées d’un point et la densité associéeMAILLAGE maillage
Objets de calcul
CHPOINT champ défini aux noeuds du maillageLISTCHPO liste de CHPOINTMMODEL type du comportement du matériauMCHAML champ défini dans les élémentsRIGIDITE matrices de rigidité, de masse, de conductivité, de convection, de rayonnement,
de rigidité géométriqueCHARGEMENT description spatiale et temporelle d’un chargementSOLUTION ensemble de modes propres et de fréquences propres associés à une
analyse modaleCONFIGURATION description d’un champ de discrétisationATTACHE description des liaisons entre sous-structures en vue d’une analyse
dynamiqueBASEMODA description des liaisons s’exerçant sur une structure et la spécification de
l’ensemble des modes et solutions statiquesBLOQSTRU description des liaisons entre sous-structures en vue d’une analyse
dynamiqueELEMSTRU description des liaisons entre sous-structures avec celle d’un élément de
structure et la géométrie associéeSTRUCTURE description d’une structure avec sa rigidité et sa masse
Objets de post-traitement
VECTEUR flèches - permet de visualiser un CHPOINT ou un MCHAML (de sous-typecontraintes principales ou variables internes).
DEFORME déformée

CLASSIFICATION DES PRINCIPAUX OPERATEURS
- -
** .....................................exponentiation* .......................................multiplie deux objets, qu’ils soient ou non de type différent- .......................................soustrait un objet d’un autre objet/........................................divise un objet par un autre+.......................................somme de plusieurs objets, y compris les objets de type différent<.......................................comparaison entre deux objets<EG................................. comparaison entre deux objets>.......................................comparaison entre deux objets>EG................................. comparaison entre deux objets
- A -
ABS................................. valeur absolue d’un objetACQU..............................permet d’acquérir des objets sur un fichier d’unité logiqueACTI................................sert à accélérer la convergence de calculs non linéairesAFCO..............................crée un objet géométrique de type (MAILLAGE) dont chaque sous objet a une couleur
spécifiqueAFFI ................................construit un objet par affinité géométriqueAIDE ...............................permet de trouver dans la notice tous les opérateurs contenant les mots-clés demandésAMOR.............................construction d’un objet de type RIGIDITE contenant une matrice diagonale
d’amortissements nodauxANTI ...............................permet d’ imposer des conditions aux limites de type antisymétrique sur les degrés de
libertéAPPU...............................construit la rigidité associée à des appuis linéaires (ressorts) appliqués à des degrés de
libertéARGU..............................permet de lire des arguments à l’intérieur d’une procédureATG................................. arc tangente d’objet, valeur en degrés
- B -
BARY..............................crée le point barycentre d’une géométrieBASE...............................création d’un objet de type BASEMODA rassemblant les divers informations relatives
à une analyse sur base modaleBLOQ..............................construit la rigidité associée à des conditions de valeurs imposes sur les inconnues
d’un problème discrétiséBRUI ...............................création d’un objet de type EVOLUTION définissant un bruit blanc à partir d’une base
temporelleBSIG................................calcule le champ de forces nodales résultant de l’intégration d’un champ de contraintes
- C -
CABL ..............................construction d’un objet de type RIGIDITE contenant la rigidité d’un câbleCAPA..............................construction d’un objet de type RIGIDITE contenant la matrice de capacité calorifiqueCAPI ................................calcule un champ de contraintes de Piola Kirchhoff à partir d’un champ de contraintes
de CauchyCARA..............................construit les caractéristiques d’un élément (épaisseur de coque, section de barre, etc)CER3...............................permet de construire un arc de cercle passant par 3 pointsCERC..............................construit un arc de cercle à partir d’un point centre et de deux pointsCHAN..............................change le type d’élément d’un maillageCHAN..............................change le type d’un objetCHARG...........................construit un objet contenant la description spatiale et temporelle du chargementCHOC..............................construction d’un objet de type ATTACHE contenant la description d’un liaison choc

CHPO..............................création d’un objet de type CHPOINT ayant pour composantes les DDL principaux del’objet de type RIGIDITE
CHSP...............................change le type d’un spectreCLST ...............................construction d’un objet de type BLOQSTRU pour écrire des liaisons entre sous-
structuresCMOY.............................calcule un choc moyen à partir d’un ensemble d’impactsCOLI................................combinaison linéaire des deux champs de même type pondérés par des nombres de
type FLOTTANTCOMB .............................combinaison linéaire d’objets consignés dans une table indicée par des objets de type
POINTCOMP..............................extrait un segment compris entre 2 points d’une ligneCOMT .............................calcule le nombre de chocs contenus dans un enregistrement d’ impacts au cours du
tempsCONC..............................concaténation de deux objets de type EVOLUTIONCOND..............................construction d’un objet de type RIGIDITE contenant la matrice de conductivité, de
convection ou du rayonnement selon le modèleCONF..............................directive servant à confondre des pointsCONF..............................directive servant à confondre des pointsCONG..............................construit un congé de raccordement (circulaire) entre deux lignesCONT..............................construit le contour d’un objetCONV..............................permet d’ imposer une condition de convection forcée sur une partie du contour (de
l’enveloppe) d’une structureCOOR..............................retrouve les coordonnées d’un objet de type POINT, MAILLAGE, CHPOINT ou
MCHAMICOOR..............................sert à retrouver les coordonnées d’un objet de type POINT, MAILLAGE, CHPOINT
ou MCHAMLCOPY..............................duplique un objetCOS................................. cosinus d’un objetCOTE..............................retrouve le côté d’un maillage de surfaceCOUL..............................duplique un objet en lui appliquant une couleurCOUR..............................crée une courbe polynomialeCOUT..............................construit une surface qui relie deux lignes ou une ligne et un point à l’aide de trianglesCRIT................................calcule le critère de plasticitéCUBP..............................construit un arc de cubique passant par 4 pointsCUBT..............................construit un arc de cubique passant par deux points avec leurs vecteurs tangents
- D -
DALL ..............................construit une surface soit à partir d’un contour, soit à partir d’une représentationpolynomiale
DEBI ...............................calcule les forces nodales dues à une condition de débit imposée sur une frontière d’unmilieu poreux
DEBP...............................crée un objet de type PROCEDURE qui définit une procédure (début d’une procédure)DEFO ..............................construit la déformé d’une structure à partir de la géométrie initiale et un champ de
déplacementDENS..............................directive servant à définir la densité du maillage en un pointDEPB...............................construction d’un objet de type ATTACHE pour imposer des déplacements dans une
sous-structureDEPI................................spécifie la valeur des déplacements imposésDEPL...............................directive servant à déplacer l’ensemble des points d’un objetDESS...............................directive permettant de tracer des courbes contenues dans un objet de type
EVOLUTIONDETR..............................directive pour détruire un objetDEVE..............................construction d’un objet de type ATTACHE contenant les données d’une liaison
déversoirDEVO..............................calcule la solution d’un système d’équations de la forme : M¨X+C¨X=F(X,t)DFOU..............................calcule les valeurs d’un champ (de force, de déplacement, de contraintes ou de
déformations) pour un angle donné dans le cas d’une analyse en série de Fourier

DIAG ...............................donne le nombre des valeurs propres négative d’une matrice de rigiditéDIFF................................construit la différence symétrique de deux objetsDIME...............................fournit la dimension d’un objetDIMN ..............................donne la dimension du noyau de la matrice de rigiditéDROI...............................construit un segment de droite joignant deux pointsDSPR...............................construit la courbe de densité spectrale de puissance d’un signalDYNE..............................calcule une réponse dynamique à l’aide d’algorithmes de explicites
- E -
EGA................................. comparaison entre deux objetsELAS...............................calcule des contraintes à partir de déformations, ou des déformations à partir de
contraintes dans l’hypothèse d’un matériau élastiqueELEM..............................permet d’extraire des éléments de différents types d’un maillageELIM ...............................directive servant à souder dans une géométrie tous les noeuds proches les uns des
autresELST ...............................construction d’un objet de type ELEMSTRU pour écrire des liaisons entre sous-
structuresENER ..............................calcule le produit tensoriel contracté d’un champ de contraintes avec un champ de
déformationsENLE...............................enlève des objets d’une liste d’objetsENTI................................conversion d’un nombre de type FLOTTANT en ENTIERENVE..............................fabrique l’enveloppe d’un volumeEPSI................................. calcule un champ de déformations à partir d’un champ de déplacementsET.................................... fusion de deux objetEVOL ..............................création d’un objet de type EVOLUTION définissant l’évolution d’une ou plusieurs
grandeurs en fonction d’un paramètreEXCE..............................cherche le minimum d’une fonctionEXCI................................construction d’un objet de type RIGIDITE contenant les blocages actifs dans le cadre
de la résolution des conditions unilatéralesEXCO..............................extrait une ou plusieurs composantes d’un champEXIS................................test l’existence d’un objetEXP................................. exponentielle d’un objetEXTR ..............................extrait d’un objet un autre objet
- F -
FACE...............................sert à retrouver une face d’un objet massif maillé avec des cubesFDT ................................. création d’un objet de type EVOLUTION définissant une fonction à partir d’une liste
d’ordonnées et d’un pas de tempsFILT ................................création d’un objet de type EVOLUTION contenant le calcul des filt res PASSE-
HAUT, PASSE-BASFIN .................................. directive permettant l’arrêt de l’exécution de CASTEM 2000 ou de terminer la
définition d’un blocFINP................................termine la définition d’une procédure (fin d’une procédure)FLOT...............................conversion d’un nombre de type ENTIER en FLOTTANTFLUX ..............................permet d’imposer un flux sur une partie du contour ou de l’enveloppe d’une structureFONC..............................calcul de fonctions de Bessel ou de FresnelFORC..............................construit un champ de forces résultant de l’application d’une force ponctuelleFORM..............................création d’un objet de type CONFIGURATION contenant une nouvelle configuration
réactualisée

- G -
GENE..............................construit la surface engendrée par la translation d’une ligne parallèlement à une autreligne
GRAD..............................calcule les gradients d’un champ pointsGREE..............................calcul des fonctions de Green associées à des poutres pour des résolutions de
problèmes dynamiques par équations intégrales
- H -
HOMO.............................construit un objet par homothétieHOOK .............................construction d’un objet de type MCHAML contenant le champ de matrice de HookeHOTA..............................calcule la matrice de Hooke tangente pour des états de contraintes et de variables
internes données
- I -
IFRE................................calcule des intégrales de FresnelINCL................................extrait d’un maill age l’ensemble des éléments se trouvant strictement à l’ intérieur du
contour d’un autre maillageINDE ...............................donne l’ensemble des indices d’une tableINFO................................directive pour donner des informations sur les directives, les opérateurs et les
procéduresINSE................................insère un objet dans une liste d’objetsINTE................................construit l’arc de courbe intersection de deux surfacesINTG...............................intégration d’une composante d’un champ sur le domaine où elle est définie, ou sur
chacun des élémentsINVA ...............................calcule les trois invariants d’un champ de tenseurs de contraintes ou de déformationsINVE ...............................change le sens de description d’une ligneIPOL................................interpolation linéaire d’une fonctionITER................................interrompt l’exécution d’un bloc Le contrôle est rendu à l’instruction FIN bloc
- J -
JACO...............................calcule la valeur absolue des jacobiens aux points d’intégration des élémentsJONC...............................construction d’un objet de type ATTACHE décrivant la liaison entre plusieurs
éléments de structure
- K -
KP.................................... calcule la matrice des pressions associée au travail des actions de pression en grandsdéplacements
KSIG................................calcule la matrice de raideur géométrique associée à un champ de contraintesKTAN ..............................calcule la matrice de raideur tangente en élasto-plasticité
- L -
LAPL ...............................construction d’un objet de type EVOLUTION contenant la transformée de LaplaceLECT...............................création d’un objet de type LISTENTI contenant une liste d’entiersLIAI ................................. construction d’un objet de type MAILLAGE contenant l’ensemble des éléments de
liaison entre deux surfacesLIRE................................directive pour lire un objet de type MAILLAGE sur le fichier d’unité logiqueLIST ................................directive pour lister le contenu d’un objetLOG................................. logarithme naturel d’un objetLUMP..............................construction d’un objet de type RIGIDITE contenant une matrice diagonale

- M -
MANU.............................création des objets de type : Maill age, CHPOINT, MCHAML, RIGIDITE ouSOLUTION
MAPP..............................construction d’un objet de type EVOLUTION contenant les points de la carte dePoincarré
MASQ .............................construit un champ constitué de 0 et de 1 à partir d’un champ par élément ou d’unchamp par point
MASS..............................construction d’un objet de type RIGIDITE contenant les matrices de masseMATE..............................crée un champ de propriété matérielles et/ou géométriqueMAX1..............................norme les composantes d’un objet en le divisant par son maximumMAXI ..............................fournit la composante maximale d’un objetMENA .............................directive pour supprimer de la mémoire les informations périmées et inaccessiblesMESS..............................directive pour éditer sous forme de message une suite d’objetMINI ................................fournit la composante minimale d’un objetMODE.............................permet d’associer à un maill age une formulation, un modèle de comportement du
matériau, un type d’élément fini et un nom de constituantMODI ..............................directive permettant, si on dispose d’un terminal graphique interactif avec un curseur,
de déplacer ou de nommer des points, de supprimer, d’ajouter ou de nommer deséléments d’un maillage
MOIN ..............................effectue la différence entre deux objetsMOME ............................construction d’un objet de type CHPOINT contenant le champ des moments appliquésMOT................................création d’un objet de type MOT contenant un alias à un mot-cléMOTA .............................calcule le champ de modules tangents, liant la vitesse de contrainte équivalente à la
vitesse de déformation plastique équivalenteMOTS..............................création d’un objet de type LISTMOTS contenant une liste de mots de 4 caractèresMULT..............................comparaison entre deux nombres entiers (vrai si l’un est un multiple de l’autre)
- N -
NBEL ..............................donne le nombre d’éléments d’un objet de type MAILLAGENBNO..............................donne le nombre de noeuds d’un objet de type MAILLAGENEG................................. comparaison entre deux objetsNNOR..............................directive pour normer un objet de façon à ce que la plus grande valeur devienne 1NOEU..............................permet d’ identifier un noeud dans un mail lage ou de connaître le numéro actuel d’un
noeud d’après son nomNOMC.............................change le nom de la composante d’un champ par pointsNON................................négation de la proposition logiqueNORM.............................norme d’un vecteurNOTI ...............................directive pour obtenir la notice d’utilisation de GIBI ou de CASTEM 2000
- O -
OBTE..............................permet d’acquérir interactivement au programme un ou plusieurs objetsOPTI................................directive servant à déclarer les principaux paramètres du calculORDO..............................directive qui range en ordre croissant ou décroissant le contenu d’un objetORIE................................construit un maill age identique au maill age initial, mais dont tous les éléments sont
orientés dans le sens trigonométrique ou en fonction de leur direction par rapport à unvecteur ou un point
ORTH..............................orthogonalisation d’un objet de type CHPOIN par rapport à une suite d’objetsorthogonaux entre eux
OSCI................................permet de calculer la réponse d’un oscillateur à un signal donnéOU................................... jonction des deux propositions logiquesOUBL ..............................permet d’effacer de la mémoire le nom d’un objet

- P -
PARA..............................construit un arc de parabolePAVE ..............................permet de mailler avec des cubes l’intérieur d’un volume parallélipédiquePERM ..............................construction d’un objet de type RIGIDITE contenant les matrices de perméabilit é des
éléments de milieux poreuxPICA................................transforme un champ de contraintes de Piola Kirchhoff en un champ de contraintes de
CauchyPJBA...............................projette des forces sur une base modale élémentaire ou complexePLAC...............................crée un objet de type ENTIER contenant la taille de la mémoire disponiblePLAS...............................réalise l’écoulement plastique selon la surface de chargePLUS...............................construit un objet résultant de la translation d’un objet par un vecteur ou par un champ
pointPMIX ...............................produit mixte de deux (en 2D) ou trois (en 3D) vecteursPOIN ...............................extrait d’une géométrie un ou plusieurs pointsPRES...............................calcule les forces nodales équivalentes d’une pression appliquée sur un objetPRIN................................calcule le champ de contraintes principales associé à un champ de contraintes Il fournit
également les cosinus directeurs des directions principales par rapport au repèregénéral
PROG..............................création d’un objet de type LISTREEL contenant une liste de flottants ou d’entiersPROI................................effectue la projection des composantes d’un champ par élément sur une nouvelle
géométriePROJ...............................construit un objet par projectionPSCA...............................produit scalaire de deux vecteurs ou de deux champs par pointsPSMO..............................permet de calculer lors d’un calcul par recombinaison modale, la contribution des
modes négligés non pris en compte dans la base modale Ces modes sont supposésavoir une réponse quasi statique
PVEC...............................produit vectoriel
- Q -
QUEL..............................construit une ligne briséeQUIT ...............................interrompt l’exécution d’un bloc ou d’une procédure Le contrôle est rendu à
l’instruction suivant la fin du bloc ou la fin de la procédureQULX..............................extrait d’un champ par points les multiplicateurs de Lagrange existant dans la matrice
de rigidité
- R -
RACC..............................engendre une ligne de points doubles en raccordant les points proches de 2 géométriesREAC..............................permet d’obtenir des réactions aux appuisRECO..............................recombine à partir des contributions modales les modes et les solutions statiques
contenus dans une base modaleREDU..............................réduit un champ par éléments ou un champ par points à un support donnéREGE..............................régénère les éléments qui ont des noeuds doublesREGL..............................construit la surface réglée s’appuyant sur deux lignesRELA...............................construction d’un objet de type RIGIDITE contenant la raideur associée à une relation
linéaire entre les degrés de liberté. Construction d’un objet de type ATTACHEdécrivant une liaison élémentaire entre une ou plusieurs sous-structures. Construire laraideur associée à une relation linéaire entre les inconnues, pondérés par descoefficients, des noeuds des maillages
REMP..............................remplace un objet dans une liste d’objetsREPE...............................permet de répéter N fois l’exécution d’un blocRESO...............................construit une solution du système linéaireRESP...............................permet de restituer des résultats calculés dans une procédureREST...............................directive pour remettre en mémoire les objets sauvés auparavant dans un fichierRESU...............................résultante d’un champ par pointsRIGI................................. construction d’un objet de type RIGIDITE contenant la matrice de rigidité

RIMP...............................directive permet de changer un objet complexe de type EVOLUTION de (partie réelle,partie imaginaire) en (module, phase) et vice et versa
ROTA..............................construit une surface engendrée par la rotation d’une ligneRTEN ..............................calcule le champ de contraintes ou de déformations dans un nouveau repère
orthonormé direct ou dans le repère d’orthotropie
- S -
SAUF...............................crée une liste contenant les éléments différents des deux listes donnéesSAUT ..............................directive pour sauter des pages ou des lignes lors de l’impressionSAUV..............................directive pour écrire sur un fichier un ou plusieurs objetsSEIS................................. crée un chargement à partir d’une description temporelle et d’une description spatiale
sur la base nodale d’un séismeSI,SINO,FINSI ................directives qui permettent l’exécution conditionnelle de données suivant la valeur de la
variable logiqueSIGM...............................calcule le champ de contraintes à partir d’un champ de déplacementsSIGN................................fournit la valeur + 1 ou - 1 selon le signe d’un objetSIGS................................calcule les contraintes à partir d’un objet de type SOLUTION ou d’un objet de type
TABLESIN .................................. sinus d’un objetSOLS...............................fabrique des solutions statistiques pour l’ensemble des liaisons permanentesSOMM .............................calcule l’ intégrale des ordonnées d’une fonction sur ses abscisses par la méthode des
trapèzesSORT...............................directive pour sortir sur un fichier le maillage demandéSOUR..............................impose une source volumique de chaleur dans une ou plusieurs parties d’une structureSPO................................. calcule les spectres d’oscillateurs selon les amortissementsSTRU ..............................construction d’un objet de type STRUCTURE contenant la rigidité et la masse des
sous-structuresSUIT................................création d’un objet de type LISTCHPO contenant une liste de champ par point
(CHPOINT)SUPE...............................construction d’un objet de type SUPERELE contenant les informations nécessaires
pour un super élément Il peut créér aussi des objets de type CHPOINT ou RIGIDITEen fonction de l’option demandée
SURF...............................construit le maillage de l’intérieur d’un contour ferméSYME..............................construit l ’objet résultant de la symétrie d’un objet par rapport à un point, une droite
ou un planSYMT..............................permet d’imposer des conditions aux limites de type symétrie sur les degrésSYNT ..............................calcule les modes de la structure à partir des modes des sous-structures et des champs
de contributions modales sur ces modes
- T -
TABL ..............................création d’un objet de type TABLETAGR..............................calcule la transposée d’une matrice de gradientsTASS...............................directive servant à retasser le contenu de la mémoire en éliminant les points qui ne
sont plus accessiblesTEMP..............................directive pour afficher le temps partiel écoulé depuis la précédente demandeTEXT...............................permet de donner un nom à un texte contenant des objets de types : MOT, ENTIER ou
FLOTTANTTFR................................. construit la transformée de Fourier rapide d’un signalTFRI................................construit la transformée de Fourier inverse d’un signalTHET...............................calcule les contraintes associées à un champ de températureTIRE................................extrait d’un objet de type solution un objet spécifié ou d’un objet de type
CHARGEMENT le chargement à un instant donnéTITR................................directive servant à donner un titre à un grapheTOTE...............................calcule la somme des intervalles sur lesquels une des abscisses d’une fonction est
supérieure à un seuil prédéfiniTOUR..............................construit un objet par rotation

TRAC..............................directive qui permet de dessiner les différents objets (maill age, champ par points,champ par éléments)
TRAN..............................construit la surface engendrée par la translation d’une ligne suivant un vecteur donnéTRES...............................calcule la contrainte équivalente de TRESCA d’un champ de contraintesTYPE...............................donne le type d’un objet
- V -
VALE ..............................retrouve les valeurs affectées aux options générales de calculVALP ..............................calcule les valeurs propres d’une matrice tridiagonaleVARI ...............................construction d’un objet de type CHPOINT ou MCHAML contenant un champ variableVECT ..............................construction d’un objet de type VECTEUR contenant les composantes d’un champ de
vecteursVERS...............................opérateur produisant une erreur si deux éléments jointifs sont orientés en sens opposésVIBR...............................recherche les valeurs et les modes propres d’un système physique représenté par sa
rigidité et sa masseVMIS...............................calcule une contrainte équivalente à un champ de contraintes Dans les cas massifs (2D
et 3D) elle coïncide avec la contrainte de Von MisesVOLU..............................construit le maill age du volume situé à l’ intérieur d’une enveloppe construit le volume
engendré par translation ou rotation d’une surface
- X -
XTMX .............................calcule l’application de la forme quadratique associée à une rigidité et à un champ parpoints
XTX................................. calcule la norme d’un champ ou celle d’une combinaison linéaire de deux champs demême type
XTY................................. calcule le produit scalaire de deux champs en faisant la somme des produits terme àterme de certaines composantes
- Y -
YTMX .............................calcule l’application de la forme bili néaire associée à une rigidité et à deux champs parpoints
- Z -
ZERO ..............................création d’un objet de type MCHAML contenant un champ dont les composantes sonttoutes nulles