Bal des pendules
4
suite en page 6 Bal des Pendules Francois.Roulet@epfl.ch, Domaine IT Introduction Peut-être avez-vous re- marqué les allers et venues sur le site EPFL d’un sur- prenant véhicule électrique à deux roues parallèles et coaxiales? Il s’agit du fameux Segway, engin révolution- naire de par sa conception, son aptitude à tourner sur place, et dont la surface occupée au sol n’excède que légèrement celle d’un piéton. Ceci en fait le véhicule le plus maniable qui puisse exister, pouvant circuler aussi aisément à l’intérieur d’un bâtiment qu’à l’exté- rieur, notamment grâce à sa faculté d’effectuer une rotation sur lui-même. Il redéfinit la relation homme-machine, en formant en quelque sorte une prolongation du corps humain, puisque pour amorcer une translation, il suffit d’exercer une pression vers l’avant, soit sur le guidon, soit avec la pointe des pieds, pour que le Segway prenne aussitôt de la vitesse. Très rapidement, cela devient un réflexe parfaitement naturel, à la manière du déclenchement d’un virage à ski par pression sur une des carres. Historique Alors que le Segway, nom de code Ginger, a été présenté en première mondiale le 3 décembre 2001, il faut rappeler que l’idée d’un tel véhicule avait germé en 1996 déjà, au labora- toire d’Electronique Industrielle de l’EPFL. Après une étude théorique en
-
Upload
truongdung -
Category
Documents
-
view
227 -
download
0
Transcript of Bal des pendules
fi 2 – 1er mars 2005 – page 1
Prochaines parutions délai rédaction parution 3 17.03.05 05.04.05 4 07.04.05 26.04.05 5 12.05.05 31.05.05 6. 09.06.05 28.06.05
Sommaire FI 2/20051 Bal desPendules
Francois Roulet2 DIT-info3 Contrôle d’accès
Daniel Grandjean@9 Sysquake 3
Yves Piguet12 Indico, un logiciel de pointe
pour la gestion de conférencesDavid Bourillot & Jean-Yves Le Meur
15 IM2.DI, intégration de documents dans des archives multimédias de réunionsDenis Lalanne, Rolf Ingold, Didier von Rotz
18 Smart Multimedia Archive for Conferences (S.M.A.C.)Omar Abou Khaled, Rudolf Scheurer, Denis Lalanne, Rolf Ingold & Jean-Yves Le Meur
21 Le mode Document Maître dans WordJacqueline Frey
23 Programme des cours26 Prenez le large avec Firefox
Olivier Burri27 Solaris 10 – les nouvelles fonc-
tionnalités majeuresPascal Fabbri
suite en page 6
Bal des Pendules
[email protected], Domaine IT
Introduction
Peut-être avez-vous re-marqué les allers et venues sur le site EPFL d’un sur-prenant véhicule électrique à deux roues parallèles et coaxiales?
Il s’agit du fameux Segway, engin révolution-naire de par sa conception, son aptitude à tourner sur place, et dont la surface occupée au sol n’excède que légèrement celle d’un piéton.
Ceci en fait le véhicule le plus maniable qui puisse exister, pouvant circuler aussi aisément à l’intérieur d’un bâtiment qu’à l’exté-rieur, notamment grâce à sa faculté d’effectuer une rotation sur lui-même. Il redéfinit la relation homme-machine, en formant en quelque sorte une prolongation du corps humain, puisque pour amorcer une translation, il suffit d’exercer une pression vers l’avant, soit sur le guidon, soit avec la pointe des pieds, pour que le Segway prenne aussitôt de la vitesse. Très rapidement, cela devient un réflexe parfaitement naturel, à la manière du déclenchement d’un virage à ski par pression sur une des carres.
Historique
Alors que le Segway, nom de code Ginger, a été présenté en première mondiale le 3 décembre 2001, il faut rappeler que l’idée d’un tel véhicule avait germé en 1996 déjà, au labora-toire d’Electronique Industrielle de l’EPFL. Après une étude théorique en
fi 2 – 1er mars 2005 – page 6
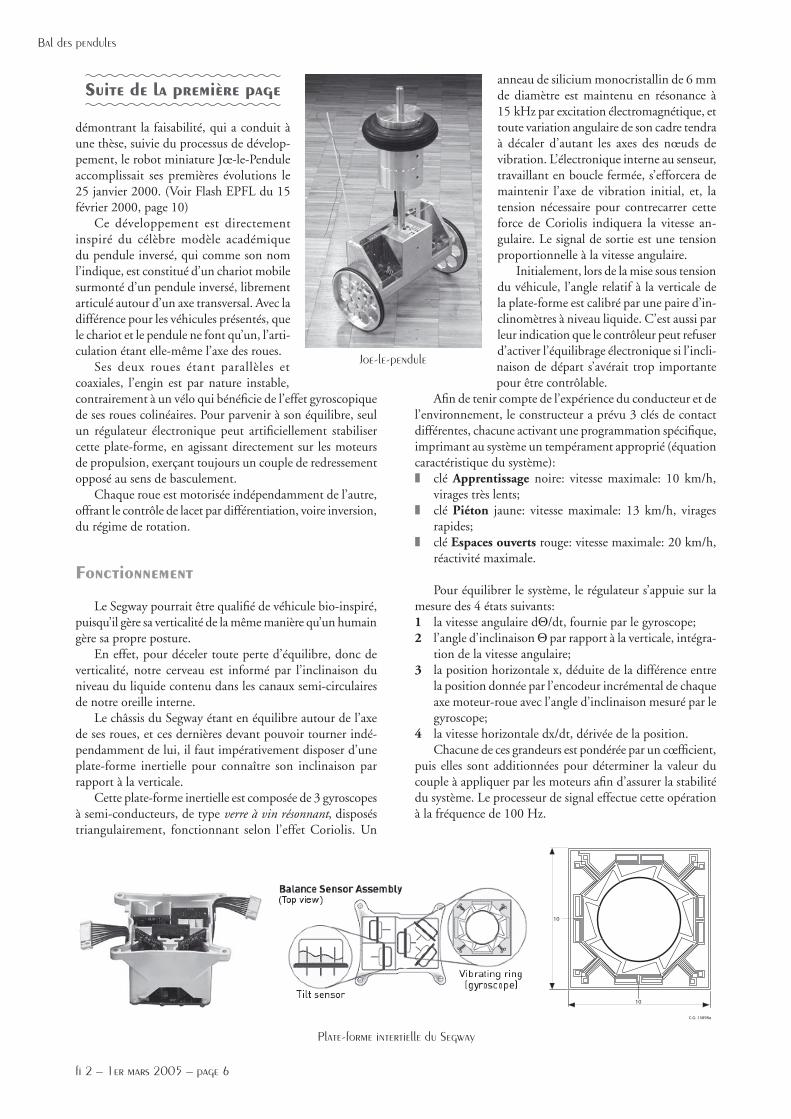
démontrant la faisabilité, qui a conduit à une thèse, suivie du processus de dévelop-pement, le robot miniature Jœ-le-Pendule accomplissait ses premières évolutions le 25 janvier 2000. (Voir Flash EPFL du 15 février 2000, page 10)
Ce développement est directement inspiré du célèbre modèle académique du pendule inversé, qui comme son nom l’indique, est constitué d’un chariot mobile surmonté d’un pendule inversé, librement articulé autour d’un axe transversal. Avec la différence pour les véhicules présentés, que le chariot et le pendule ne font qu’un, l’arti-culation étant elle-même l’axe des roues.
Ses deux roues étant parallèles et coaxiales, l’engin est par nature instable, contrairement à un vélo qui bénéficie de l’effet gyroscopique de ses roues colinéaires. Pour parvenir à son équilibre, seul un régulateur électronique peut artificiellement stabiliser cette plate-forme, en agissant directement sur les moteurs de propulsion, exerçant toujours un couple de redressement opposé au sens de basculement.
Chaque roue est motorisée indépendamment de l’autre, offrant le contrôle de lacet par différentiation, voire inversion, du régime de rotation.
Fonctionnement
Le Segway pourrait être qualifié de véhicule bio-inspiré, puisqu’il gère sa verticalité de la même manière qu’un humain gère sa propre posture.
En effet, pour déceler toute perte d’équilibre, donc de verticalité, notre cerveau est informé par l’inclinaison du niveau du liquide contenu dans les canaux semi-circulaires de notre oreille interne.
Le châssis du Segway étant en équilibre autour de l’axe de ses roues, et ces dernières devant pouvoir tourner indé-pendamment de lui, il faut impérativement disposer d’une plate-forme inertielle pour connaître son inclinaison par rapport à la verticale.
Cette plate-forme inertielle est composée de 3 gyroscopes à semi-conducteurs, de type verre à vin résonnant, disposés triangulairement, fonctionnant selon l’effet Coriolis. Un
anneau de silicium monocristallin de 6 mm de diamètre est maintenu en résonance à 15 kHz par excitation électromagnétique, et toute variation angulaire de son cadre tendra à décaler d’autant les axes des nœuds de vibration. L’électronique interne au senseur, travaillant en boucle fermée, s’efforcera de maintenir l’axe de vibration initial, et, la tension nécessaire pour contrecarrer cette force de Coriolis indiquera la vitesse an-gulaire. Le signal de sortie est une tension proportionnelle à la vitesse angulaire.
Initialement, lors de la mise sous tension du véhicule, l’angle relatif à la verticale de la plate-forme est calibré par une paire d’in-clinomètres à niveau liquide. C’est aussi par leur indication que le contrôleur peut refuser d’activer l’équilibrage électronique si l’incli-naison de départ s’avérait trop importante pour être contrôlable.
Afin de tenir compte de l’expérience du conducteur et de l’environnement, le constructeur a prévu 3 clés de contact différentes, chacune activant une programmation spécifique, imprimant au système un tempérament approprié (équation caractéristique du système):❚ clé Apprentissage noire: vitesse maximale: 10 km/h,
virages très lents;❚ clé Piéton jaune: vitesse maximale: 13 km/h, virages
rapides;❚ clé Espaces ouverts rouge: vitesse maximale: 20 km/h,
réactivité maximale.
Pour équilibrer le système, le régulateur s’appuie sur la mesure des 4 états suivants:1 la vitesse angulaire dΘ/dt, fournie par le gyroscope;2 l’angle d’inclinaison Θ par rapport à la verticale, intégra-
tion de la vitesse angulaire;3 la position horizontale x, déduite de la différence entre
la position donnée par l’encodeur incrémental de chaque axe moteur-roue avec l’angle d’inclinaison mesuré par le gyroscope;
4 la vitesse horizontale dx/dt, dérivée de la position.Chacune de ces grandeurs est pondérée par un cœfficient,
puis elles sont additionnées pour déterminer la valeur du couple à appliquer par les moteurs afin d’assurer la stabilité du système. Le processeur de signal effectue cette opération à la fréquence de 100 Hz.
Bal des pendules
��
��
�����������
Suite de la première page
Joe-le-pendule
Plate-forme intertielle du Segway
fi 2 – 1er mars 2005 – page 7
RemarqueLes gyroscopes à semi-conducteurs n’ont absolument
aucune influence mécanique sur le véhicule, leur fonction étant uniquement de fournir une indication de la variation angulaire de la plate-forme. Seuls les moteurs assurent l’équi-libre de l’ensemble.
Schéma du traitement des signaux de Joe
Schéma du régulateur de Joe
Différence entre Joe et le Segway
L’équilibre des deux plates-formes est similairement as-suré par leurs régulateurs embarqués. Ce qui les distingue, c’est que Jœ est piloté par l’entremise d’une télécommande, qui lui dicte sa vitesse de translation ainsi que sa vitesse de virage, alors que la vitesse de translation du Segway est impo-sée par la posture de son pilote. Seul le contrôle de lacet est identique, déterminé pour le Segway par une bague rotative sur le guidon. Pour les deux véhicules, la différentiation de régime de rotation des roues est inversement proportionnelle à la vitesse de translation, prévenant ainsi le risque tête à queue impromptu.
Compte tenu de son rapport hauteur/largeur, le Segway exige du pilote de se pencher vers l’intérieur du virage, tel un pilote de side-car, pour contrecarrer le risque de tonneau provoqué par la force centrifuge.
Il suffit d’exercer une pression vers l’avant, soit sur le guidon, soit avec la pointe des pieds, pour que le Segway prenne aussitôt de la vitesse.
Pour adopter ce comportement, le régulateur du Segway, contrairement à celui de Jœ, ne prend pas en compte la
mesure de la position horizontale. Il en découle que tout déséquilibre entraîne automatiquement une vitesse de translation proportionnelle au couple perturbateur, c’est-à-dire, à la force exercée sur le guidon, comme le montre le diagramme 2 ci-après.
Simulations
Une perturbation rampe de vitesse est appliquée à l’entrée du régulateur de Jœ.
Sur le diagramme 1, nous observons qu’avant d’exécuter une marche en avant, Jœ est contraint de préalablement recu-ler afin d’incliner le pendule dans la direction de translation, autorisant ensuite le déploiement d’un couple accélérateur. Après 1.5 seconde, la consigne est maintenue à la valeur de 1.5 m/s, et nous observons un dépassement de vitesse pour redresser le robot. Au bout de 4.5 secondes, la consigne de vitesse diminue, provoquant d’abord une survitesse du robot, nécessaire à son basculement vers l’arrière, prérequis pour amorcer une décélération. L’excursion se termine par une brève marche arrière non désirée, mais nécessaire à la phase de stabilisation finale.
diagramme 1 – Simulation de Joe avec le logiciel Sysquake, unités mksA
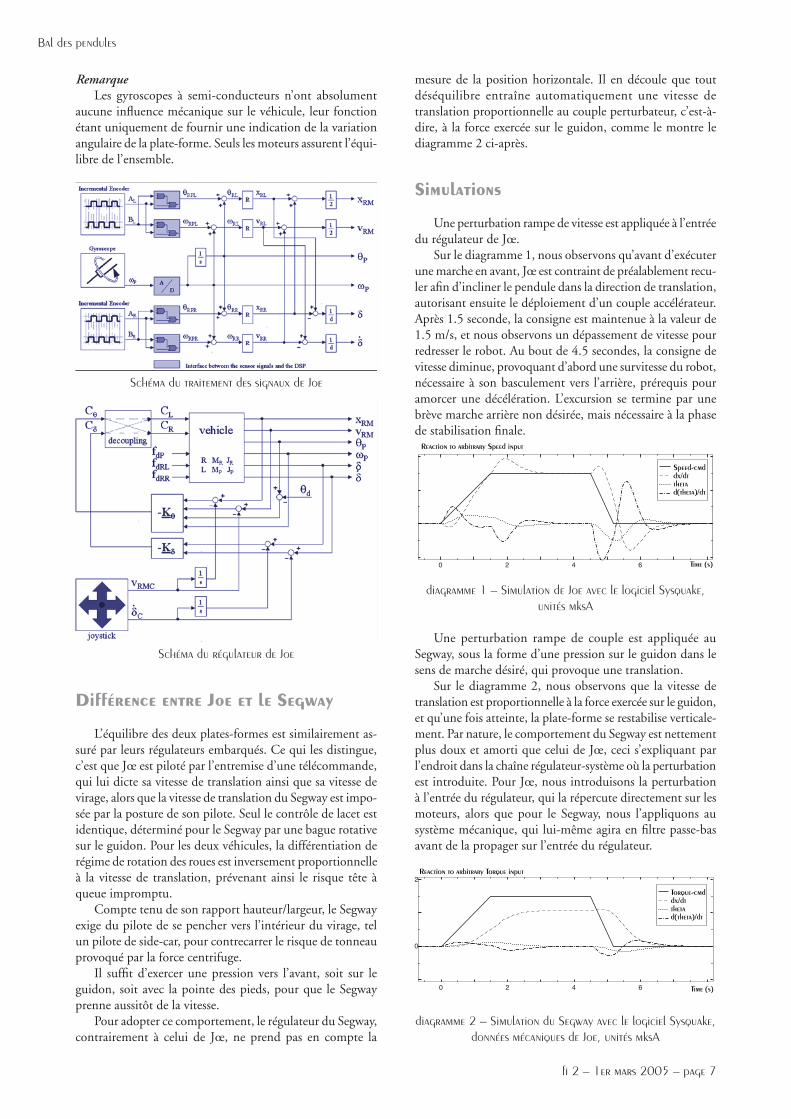
Une perturbation rampe de couple est appliquée au Segway, sous la forme d’une pression sur le guidon dans le sens de marche désiré, qui provoque une translation.
Sur le diagramme 2, nous observons que la vitesse de translation est proportionnelle à la force exercée sur le guidon, et qu’une fois atteinte, la plate-forme se restabilise verticale-ment. Par nature, le comportement du Segway est nettement plus doux et amorti que celui de Jœ, ceci s’expliquant par l’endroit dans la chaîne régulateur-système où la perturbation est introduite. Pour Jœ, nous introduisons la perturbation à l’entrée du régulateur, qui la répercute directement sur les moteurs, alors que pour le Segway, nous l’appliquons au système mécanique, qui lui-même agira en filtre passe-bas avant de la propager sur l’entrée du régulateur.
diagramme 2 – Simulation du Segway avec le logiciel Sysquake, données mécaniques de Joe, unités mksA
Bal des pendules

fi 2 – 1er mars 2005 – page 8
Sécurité
Afin de garantir la sécurité du conducteur, le système de contrôle est entièrement dédoublé, assurant une totale redondance de toute la chaîne capteur-régulateur-moteur:❚ triples gyroscopes❚ doubles inclinomètres❚ doubles cartes contrôleurs❚ doubles bobinages moteurs, et rotors à aimants perma-
nents❚ doubles batteries.
La sécurité du conducteur étant primordiale, il faut impé-rativement tenir compte de la vitesse au-delà de laquelle nous ne disposerions plus de suffisamment de réserve de puissance pour contrecarrer une chute potentielle. Le Segway est doté d’un limiteur de vitesse original, puisqu’il est impossible de simplement plafonner le régime des moteurs: c’est un actuateur qui redresse le manche du guidon, forçant ainsi le conducteur à se redresser sur la plate-forme, et par réaction, permettre au Segway de ralentir. Un second avertisseur vibrant, toujours sur le manche du guidon, entre en action lorsque l’état de charge des batteries manifeste une trop faible capacité, ou lorsque durant le démarrage, la plate-forme n’est pas suffisamment horizontale.
Construction
Fiche technique du SegwayAutonomie: 15 - 20 kmVitesse maxi: 20 km/hPuissance totale: 2x 1.5 kWPente franchissable sur sol adhérent: 30 degrés. (60%)Elévation du plancher: 20 cm.Poids à vide: 38 kgPoids du conducteur (min, max): 45 - 113 kg.Prix: $4500
Sur cette vue du Segway, nous distinguons successi-vement, partant du centre vers la droite: la plate-forme
Bal des pendules
inertielle, le moteur et son capteur incrémental intégré, et le réducteur. Transversalement disposées, respectivement à l’avant et l’arrière, nous observons les cartes contrôleur. Les deux blocs de batteries NiMH sont logés sous les cartes contrôleur, c’est à dire sous le niveau des axes moteurs, ces derniers étant eux-mêmes, par l’entremise du réducteur, bien en dessous de l’axe des roues, donc de l’axe de pivotement du véhicule.
RemarquesPour des raisons évidentes, le Segway ne comporte pas
de freins: le ralentissement est obtenu par inclinaison du pilote vers l’arrière. Durant le ralentissement, typiquement lors d’une descente, l’énergie est récupérée pour recharger les batteries.
Conclusion
Comme le démontrent les deux simulations numériques, il n’aurait pas été possible d’implémenter sur le Segway une commande de vitesse de type poignée de gaz comme celle de Jœ, en raison de la brutalité des réactions que cela aurait provoqué. La seule solution était de se servir du couple perturbateur imprimé par l’inclinaison du pilote sur la plate-forme, ce qui s’apparente à une commande de type pédale de gaz.
Les mesures effectuées à l’EPFL ont montré que, dans le cadre de ses tâches réparties entre des bâtiments disséminés dont la distribution du courrier, Monsieur Monney parcourt quotidiennement près de 10 km en Segway. A la différence d’un vélo, il se meut aussi aisément à l’intérieur qu’à l’exté-rieur de notre site, et peut même tracter d’une main un cha-riot derrière lui (déconseillé par le constructeur). Pour vous donner une idée de la proverbiale mobilité du Segway, rien ne vaut d’assister à un match de Polo, organisé par des adeptes dans la baie de San Francisco (voir url en fin d’article).
Remerciements
Remerciements à MM. Felix Grasser pour la mise à disposition des schémas et valeurs numériques du modèle de Jœ, Yves Piguet pour sa précieuse aide à la simulation avec le logiciel Sysquake dont il est l’auteur, ainsi que Denis Monney pour l’essai du Segway.
url
❚ http://www.segway.com/❚ http://leiwww.epfl.ch/jœ/❚ http://www.bayareaseg.com/Polo.htm ■