Automatique Continue Travaux...
38
Télécom Physique Strasbourg Automatique Continue Travaux Pratiques Bernard BAYLE http://eavr.u-strasbg.fr/~bernard
Transcript of Automatique Continue Travaux...
Télécom Physique Strasbourg
Automatique Continue
Travaux Pratiques
Bernard BAYLEhttp://eavr.u-strasbg.fr/~bernard

Ce document (version 2016) évolue grâce à votre concours.Pour l’améliorer, communiquez vos remarques ou corrections à [email protected].
Automatique continue Travaux Pratiques, page 1
1 Préparation
Il est impératif de préparer chaque séance de travaux pratiques. On estime à 1,5 heures le tempsnécessaire pour préparer un TP . Dans la mesure du possible, la quantité de calculs nécessaire a été li-mitée. Par exemple, il est souvent demandé de tracer l’allure des courbes plutôt que de développer descalculs complexes. Pour rassembler les éléments importants de la préparation, on donne égalementunefeuille de préparationpour chaque énoncé.
Le TP 1 porte sur l’asservissement d’un système de lévitation magnétique. Le TP 2 porte surl’identification indicielle et l’asservissement de température (maquette pédagogique d’un systèmethermique). Le TP 3 porte sur l’identification fréquentielle et l’asservissement de position (maquettemoteur faible puissance). Le TP 4 est un sujet de TP de révision, non inclus dans la rotation, que vouspouvez effectuer seul, par exemple pour préparer l’examen.Il complète le dernier TP Matlab.
2 Evaluation et rotation
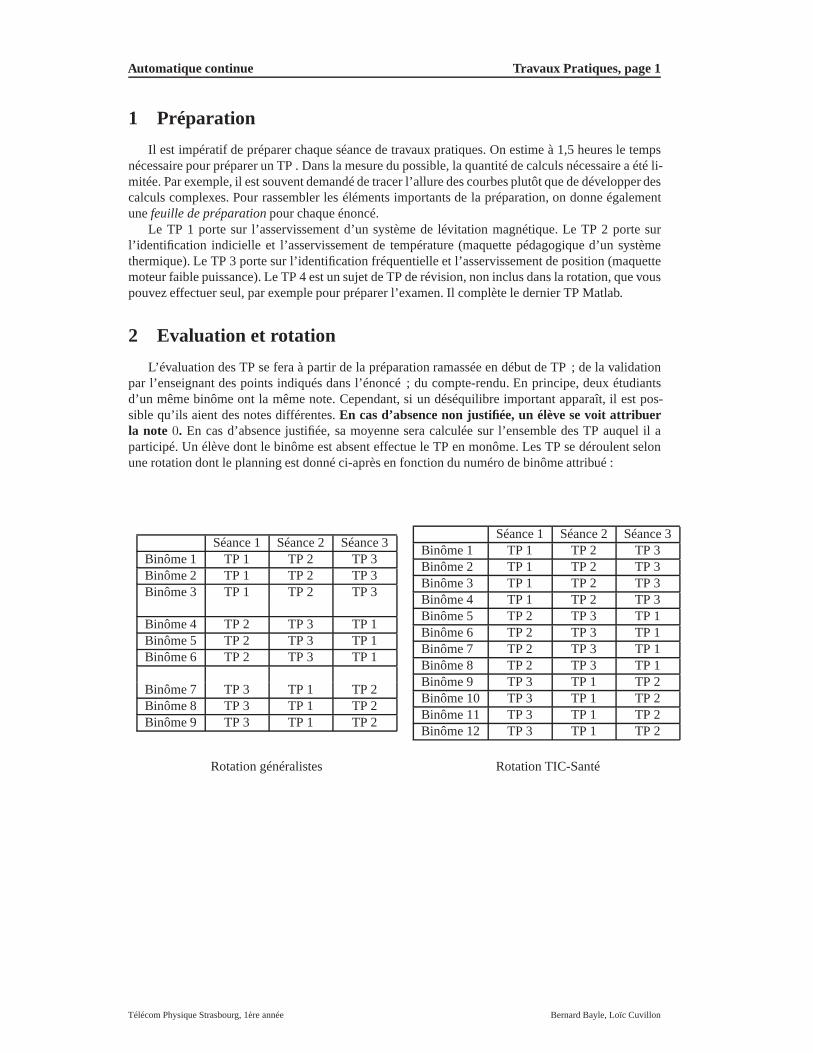
L’évaluation des TP se fera à partir de la préparation ramassée en début de TP ; de la validationpar l’enseignant des points indiqués dans l’énoncé ; du compte-rendu. En principe, deux étudiantsd’un même binôme ont la même note. Cependant, si un déséquilibre important apparaît, il est pos-sible qu’ils aient des notes différentes.En cas d’absence non justifiée, un élève se voit attribuerla note 0. En cas d’absence justifiée, sa moyenne sera calculée sur l’ensemble des TP auquel il aparticipé. Un élève dont le binôme est absent effectue le TP en monôme. Les TP se déroulent selonune rotation dont le planning est donné ci-après en fonctiondu numéro de binôme attribué :
Séance 1 Séance 2 Séance 3Binôme 1 TP 1 TP 2 TP 3Binôme 2 TP 1 TP 2 TP 3Binôme 3 TP 1 TP 2 TP 3
Binôme 4 TP 2 TP 3 TP 1Binôme 5 TP 2 TP 3 TP 1Binôme 6 TP 2 TP 3 TP 1
Binôme 7 TP 3 TP 1 TP 2Binôme 8 TP 3 TP 1 TP 2Binôme 9 TP 3 TP 1 TP 2
Séance 1 Séance 2 Séance 3Binôme 1 TP 1 TP 2 TP 3Binôme 2 TP 1 TP 2 TP 3Binôme 3 TP 1 TP 2 TP 3Binôme 4 TP 1 TP 2 TP 3Binôme 5 TP 2 TP 3 TP 1Binôme 6 TP 2 TP 3 TP 1Binôme 7 TP 2 TP 3 TP 1Binôme 8 TP 2 TP 3 TP 1Binôme 9 TP 3 TP 1 TP 2Binôme 10 TP 3 TP 1 TP 2Binôme 11 TP 3 TP 1 TP 2Binôme 12 TP 3 TP 1 TP 2
Rotation généralistes Rotation TIC-Santé
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 1
TP 1 – Lévitation magnétique
1 Objectif - Système étudié
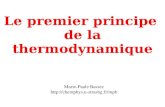
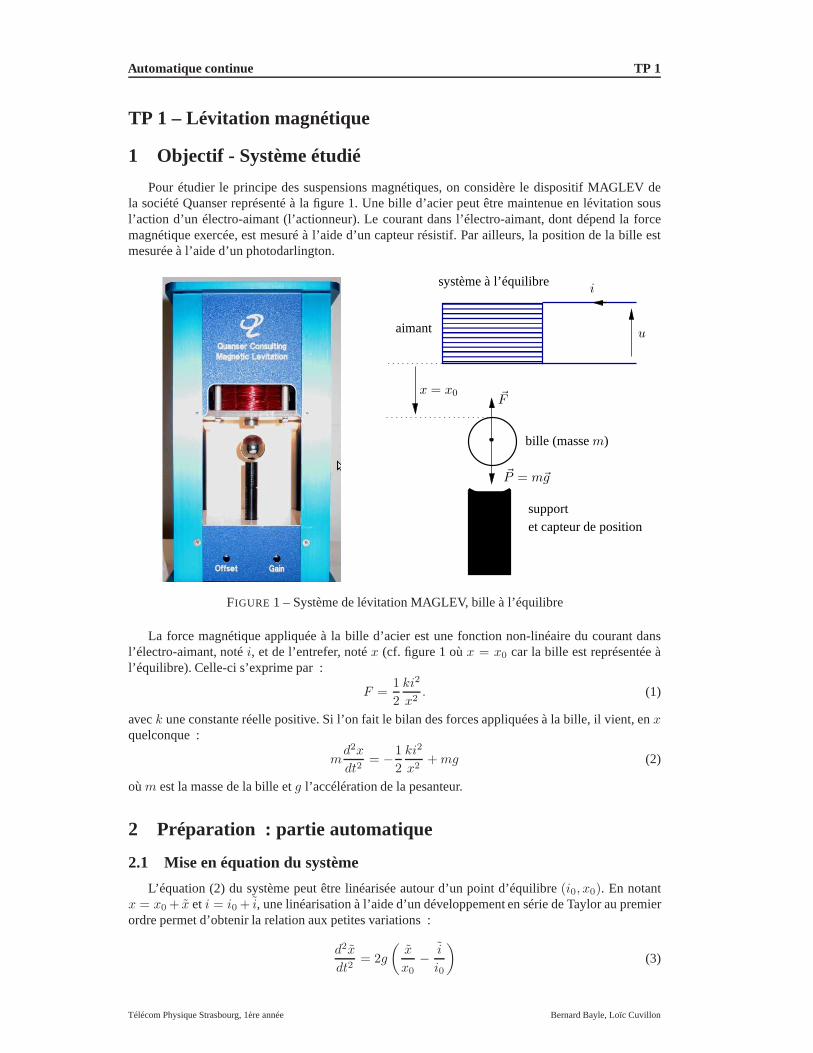
Pour étudier le principe des suspensions magnétiques, on considère le dispositif MAGLEV dela société Quanser représenté à la figure 1. Une bille d’acierpeut être maintenue en lévitation sousl’action d’un électro-aimant (l’actionneur). Le courant dans l’électro-aimant, dont dépend la forcemagnétique exercée, est mesuré à l’aide d’un capteur résistif. Par ailleurs, la position de la bille estmesurée à l’aide d’un photodarlington.
système à l’équilibre
supportet capteur de position
x = x0
bille (massem)
~P = m~g
~F
u
i
aimant
FIGURE 1 – Système de lévitation MAGLEV, bille à l’équilibre
La force magnétique appliquée à la bille d’acier est une fonction non-linéaire du courant dansl’électro-aimant, notéi, et de l’entrefer, notéx (cf. figure 1 oùx = x0 car la bille est représentée àl’équilibre). Celle-ci s’exprime par :
F =1
2
ki2
x2. (1)
aveck une constante réelle positive. Si l’on fait le bilan des forces appliquées à la bille, il vient, enxquelconque :
md2x
dt2= −
1
2
ki2
x2+mg (2)
oùm est la masse de la bille etg l’accélération de la pesanteur.
2 Préparation : partie automatique
2.1 Mise en équation du système
L’équation (2) du système peut être linéarisée autour d’un point d’équilibre(i0, x0). En notantx = x0 + x et i = i0 + i, une linéarisation à l’aide d’un développement en série de Taylor au premierordre permet d’obtenir la relation aux petites variations :
d2x
dt2= 2g
(
x
x0−
i
i0
)
(3)
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 1
1. En déduire la fonction de transfert du procédé autour du point d’équilibre(i0, x0) :
G(s) =X(s)
I(s)(4)
que l’on caractérisera : ordre, classe, pôles, zéros.
2. Le système est-il stable ? Donner une interprétation physique du résultat précédent.
Asservissement du système
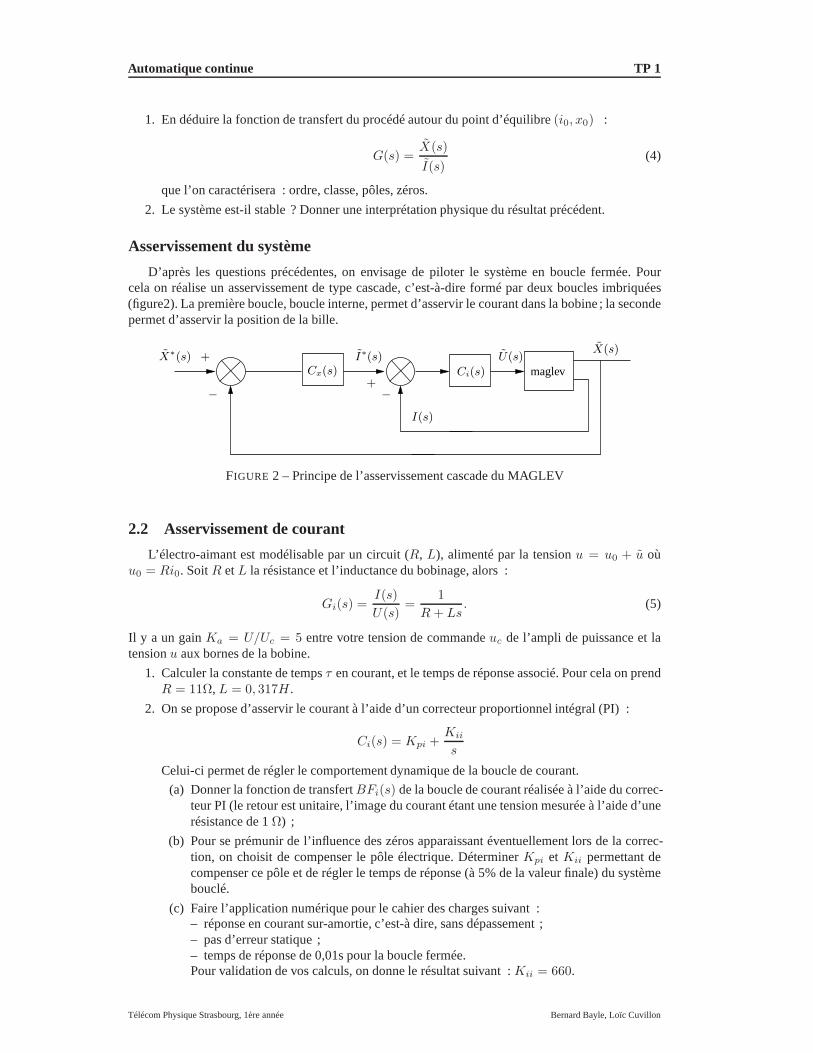
D’après les questions précédentes, on envisage de piloter le système en boucle fermée. Pourcela on réalise un asservissement de type cascade, c’est-à-dire formé par deux boucles imbriquées(figure2). La première boucle, boucle interne, permet d’asservir le courant dans la bobine ; la secondepermet d’asservir la position de la bille.
−−
+X(s)
U(s)X∗(s)
Cx(s) maglevI∗(s)
Ci(s)+
I(s)
FIGURE 2 – Principe de l’asservissement cascade du MAGLEV
2.2 Asservissement de courant
L’électro-aimant est modélisable par un circuit (R, L), alimenté par la tensionu = u0 + u oùu0 = Ri0. SoitR etL la résistance et l’inductance du bobinage, alors :
Gi(s) =I(s)
U(s)=
1
R+ Ls. (5)
Il y a un gainKa = U/Uc = 5 entre votre tension de commandeuc de l’ampli de puissance et latensionu aux bornes de la bobine.
1. Calculer la constante de tempsτ en courant, et le temps de réponse associé. Pour cela on prendR = 11Ω, L = 0, 317H .
2. On se propose d’asservir le courant à l’aide d’un correcteur proportionnel intégral (PI) :
Ci(s) = Kpi +Kii
s
Celui-ci permet de régler le comportement dynamique de la boucle de courant.
(a) Donner la fonction de transfertBFi(s) de la boucle de courant réalisée à l’aide du correc-teur PI (le retour est unitaire, l’image du courant étant unetension mesurée à l’aide d’unerésistance de 1Ω) ;
(b) Pour se prémunir de l’influence des zéros apparaissant éventuellement lors de la correc-tion, on choisit de compenser le pôle électrique. Déterminer Kpi et Kii permettant decompenser ce pôle et de régler le temps de réponse (à 5% de la valeur finale) du systèmebouclé.
(c) Faire l’application numérique pour le cahier des charges suivant :– réponse en courant sur-amortie, c’est-à dire, sans dépassement ;– pas d’erreur statique ;– temps de réponse de 0,01s pour la boucle fermée.Pour validation de vos calculs, on donne le résultat suivant: Kii = 660.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 1
Ci(s)
−
+I∗(s) I(s)
Gi(s)U(s)Uc(s)
BFi(s)
Ka
FIGURE 3 – Principe de l’asservissement de courant du MAGLEV
2.3 Asservissement de position
On noteBFi(s) la fonction de transfert du système asservi en courant, dontla valeur numérique,suite à la correction précédente est :
BFi(s) =1
1 + τis
Le principe de l’asservissement de position du MAGLEV peut alors être décrit par la figure 4.
−
+X∗(s)
Cx(s)X(s)
BFi(s) G(s)
I(s)I∗(s)
Gx(s)
Kx
FIGURE 4 – Principe de l’asservissement de position du MAGLEV
1. Pour pouvoir mener les calculs à la main, on suppose que l’asservissement de courant est bienplus rapide que l’asservissement de position. Expliquer pourquoi cela se traduit par l’approxi-mationBFi(s) = 1.
2. Alors la fonction de transfert du procédé bouclé en courant est :
Gx(s) =X
I∗= G(s) (6)
Le systèmeGx(s) étant instable, pourquoi faut-il un correcteur à action dérivée pour l’asservir?
3. Calculer un correcteur de type PID idéal :
Cx(s) = Kpx +Kix
s+Kdxs
qui permette de remplir le cahier des charges suivant :– aussi peu de dépassement que possible ;– pas d’erreur statique ;– temps de réponse de à 0,8 s.
(a) Pour cela, on calculera d’abord la fonction de transferten boucle ouverte, puis en bouclefermée avec le correcteur.Remarque importante : les grandeurs en pratique étant des tensions image de la posi-tion, ne pas oublier dans l’expression de la BF que le gain du capteur de position estKx = −(∆Vx/∆x) = −4, 95/0, 014 V/m.On donne par ailleurs :g = 9, 81 m s−2, i0 = 0, 86 A, x0 = 6, 10−3 m.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 1
(b) Ensuite, on choisira les valeurs des 3 pôlesp1, p2, p3 souhaités pour la boucle ferméeafin de remplir le cahier des charges. Typiquement, un pôle réel dominantp1 pour imposerla dynamique de la réponse et deux pôles négligeablesp2 = p3 = 10p1.
(c) En identifiant terme à terme le dénominateur de la fonction de transfert en boucle ferméeavec le développement du dénominateur souhaité(s−p1)(s−p2)(s−p3), exprimerKpx,Kix etKdx en fonction dep1.
Pour validation de vos calculs, on donne le résultat suivant: Kdx = 21p1
2gKx
i0.
3 Préparation : partie électronique
L’asservissement complet du système est réalisé à l’aide decircuits analogiques. Pour ce faire,nous utilisons quatre types de cellules analogiques à base d’amplificateurs opérationnels :
– une cellule de filtrage du premier ordre avec un suiveur pourla mesure de position ;– une cellule soustractrice pour calculer l’erreur ;– une cellule PI ;– une cellule PID.
3.1 Cellule de filtrage
La mesure de la tension fournie par le capteur de position fait apparaître un fort bruit, surtout àfréquences importantes (≥ 10 kHz). La cellule de filtrage de la figure 5 sera utilisée pourfiltrer cebruit.
1. Calculer la fonction transfert du montage.
2. Tracer le diagramme de Bode asymptotique.
3. Proposer alors une valeur pertinente pour la fréquence decoupure, tel que le bruit subisse uneatténuation de 90% par exemple.
FIGURE 5 – Filtre passe-bas du 1er ordre réalisé avec un AOP.
3.2 Cellule PI
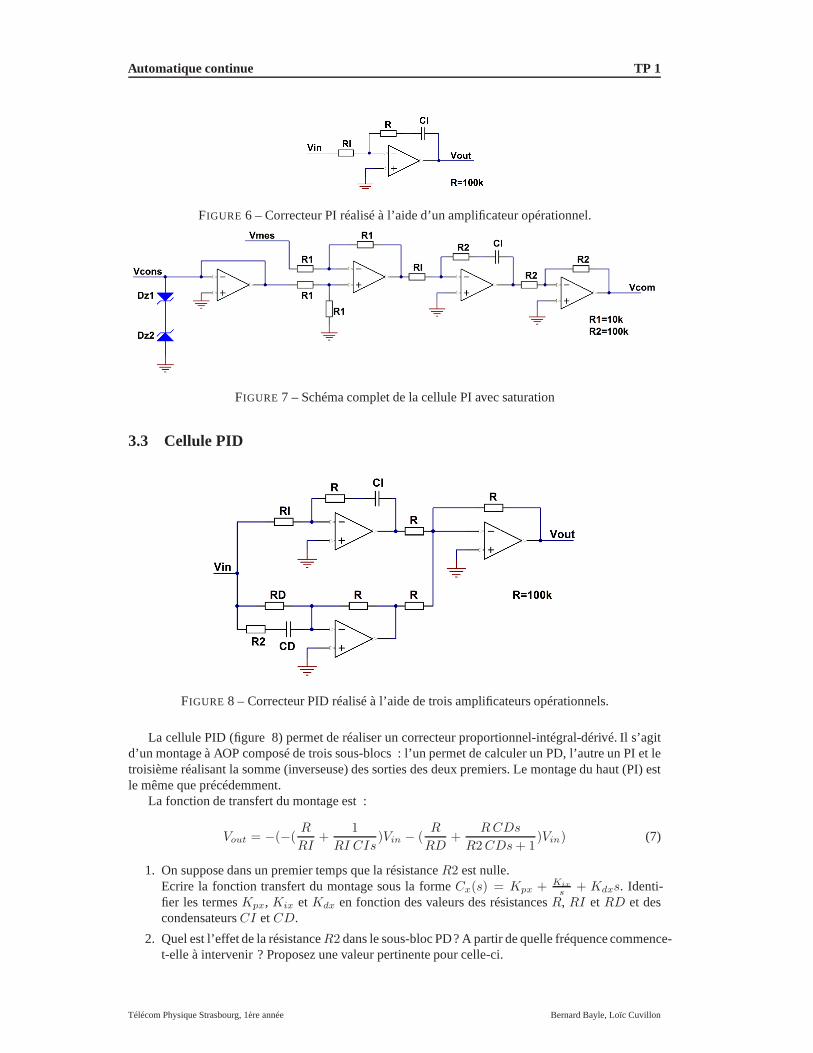
La cellule PI (figure 6) permet de réaliser un correcteur proportionnel-intégral.
1. Calculer la fonction transfert du montage figure 6. Le montage étant suivi sur la carte par uninverseur, multiplier par un gain−1 la fonction de transfert précédente et la mettre sous laformeCi(s) = Kpi +
Kii
s.
2. Identifier les termesKpi etKii en fonction des valeurs des résistancesR etRI et du conden-sateurCI.
3. Tracer le diagramme de Bode asymptotique du système en précisant la fréquence de transition.
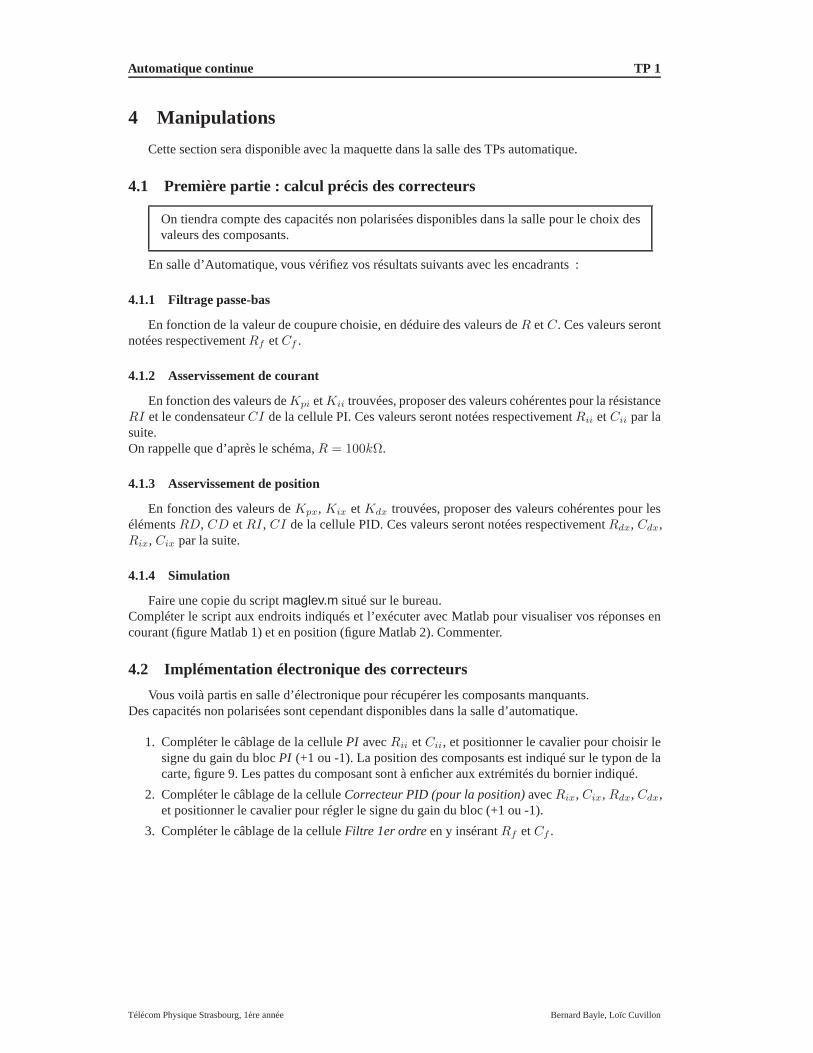
4. En pratique, la boucle de courant sera réalisée par 2 cellules : PI et Soustracteur Sat. Com-mande. Ces cellules sont composées de quatre amplificateurs opérationnels (figure 7). Identifierla fonction de chacun d’entre eux.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 1
FIGURE 6 – Correcteur PI réalisé à l’aide d’un amplificateur opérationnel.
FIGURE 7 – Schéma complet de la cellule PI avec saturation
3.3 Cellule PID
FIGURE 8 – Correcteur PID réalisé à l’aide de trois amplificateurs opérationnels.
La cellule PID (figure 8) permet de réaliser un correcteur proportionnel-intégral-dérivé. Il s’agitd’un montage à AOP composé de trois sous-blocs : l’un permet de calculer un PD, l’autre un PI et letroisième réalisant la somme (inverseuse) des sorties des deux premiers. Le montage du haut (PI) estle même que précédemment.
La fonction de transfert du montage est :
Vout = −(−(R
RI+
1
RI CIs)Vin − (
R
RD+
RCDs
R2CDs+ 1)Vin) (7)
1. On suppose dans un premier temps que la résistanceR2 est nulle.Ecrire la fonction transfert du montage sous la formeCx(s) = Kpx + Kix
s+ Kdxs. Identi-
fier les termesKpx, Kix et Kdx en fonction des valeurs des résistancesR, RI et RD et descondensateursCI etCD.
2. Quel est l’effet de la résistanceR2 dans le sous-bloc PD? A partir de quelle fréquence commence-t-elle à intervenir ? Proposez une valeur pertinente pour celle-ci.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 1
4 Manipulations
Cette section sera disponible avec la maquette dans la salledes TPs automatique.
4.1 Première partie : calcul précis des correcteurs
On tiendra compte des capacités non polarisées disponiblesdans la salle pour le choix desvaleurs des composants.
En salle d’Automatique, vous vérifiez vos résultats suivants avec les encadrants :
4.1.1 Filtrage passe-bas
En fonction de la valeur de coupure choisie, en déduire des valeurs deR etC. Ces valeurs serontnotées respectivementRf etCf .
4.1.2 Asservissement de courant
En fonction des valeurs deKpi etKii trouvées, proposer des valeurs cohérentes pour la résistanceRI et le condensateurCI de la cellule PI. Ces valeurs seront notées respectivementRii etCii par lasuite.On rappelle que d’après le schéma,R = 100kΩ.
4.1.3 Asservissement de position
En fonction des valeurs deKpx, Kix etKdx trouvées, proposer des valeurs cohérentes pour lesélémentsRD, CD etRI, CI de la cellule PID. Ces valeurs seront notées respectivementRdx, Cdx,Rix, Cix par la suite.
4.1.4 Simulation
Faire une copie du scriptmaglev.m situé sur le bureau.Compléter le script aux endroits indiqués et l’exécuter avec Matlab pour visualiser vos réponses encourant (figure Matlab 1) et en position (figure Matlab 2). Commenter.
4.2 Implémentation électronique des correcteurs
Vous voilà partis en salle d’électronique pour récupérer les composants manquants.Des capacités non polarisées sont cependant disponibles dans la salle d’automatique.
1. Compléter le câblage de la cellulePI avecRii etCii, et positionner le cavalier pour choisir lesigne du gain du blocPI (+1 ou -1). La position des composants est indiqué sur le typon de lacarte, figure 9. Les pattes du composant sont à enficher aux extrémités du bornier indiqué.
2. Compléter le câblage de la celluleCorrecteur PID (pour la position)avecRix, Cix, Rdx, Cdx,et positionner le cavalier pour régler le signe du gain du bloc (+1 ou -1).
3. Compléter le câblage de la celluleFiltre 1er ordreen y insérantRf etCf .
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 1
FIGURE 9 – Typon de la cartecorrecteur
mesure I
mesure X
S3S1
Interrupteur
Alim Maglev
Uc U
Alimentation(au dos)
Ka
S1, S3: fiches femelles bananes
FIGURE 10 – Câblage de la maquette Maglev
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 1
4.3 Asservissements
4.3.1 Boucle de courant
– Faire vérifier votre montage à l’enseignant avant d’allumer !– NE PAS LAISSER INUTILEMENT SOUS TENSION L’ASSERVISSEMENTLORS
DES ESSAIS : Couper l’alimentation +-15V de la carte correcteur (et ainsi la commandede courant Uc vers l’amplificateur) dès la fin de l’essai.L’élévation de température de la bobine provoque une modification du modèle et son iner-tie thermique importante nécessite une heure avant son retour à température ambiante.
1. Connecter l’alimentation +-15V sans l’allumer à la cartecorrecteur. A partir du schéma de câ-blage de l’amplificateur du Maglev (figure 10), connecter la mesure et la commande de courant.Utiliser un GBF pour la consigne.Des câbles BNC et bananes sont disponibles sur le porte-manteaux.
2. Câbler la boucle de courant seule : retirer les cavaliers adéquats pour supprimer les connectionsentre blocs et utiliser les petits fils bleues présents sur lapaillasse pour rétablir des connectionsadéquates.
3. Allumer l’alimentation du Maglev puis l’alimentation +-15V. Visualiser alors le temps de ré-ponse de la boucle de courant avec une consigne de faible amplitude (400mV), d’offset nul,mais de fréquence et forme adaptées. La réponse en courant est elle conforme à la simulation ?
4.3.2 Validation du Filtre passe-bas
1. Eteindre l’alimentation +-15V. Déconnecter temporairement la mesure de courant etla com-mande de courant de votre carte (le câble en sortie de la carte). Câbler alors un montagepour tester seul le filtre de premier ordre.
2. Vérifier la fréquence de coupure du filtre et son bon fonctionnement.
4.3.3 Boucle de position et courant imbriquées
1. Connecter les différentes mesures et commandes sur votrecarte. Rétablir les connections parcavaliers entre les 2 boucles d’asservissement imbriquées.
2. Vérifier le capteur de position avant de tenter l’asservissement de position : 0V si la bille estsur son support,≈ 2.5V en son absence.
3. Faire valider votre montage. Visualiser la consigne de position et la position mesurée à l’oscil-loscope.Choisir une consigne de position dont on pourra modifier l’offset jusqu’à la lévitation de labille.Alternative : tenir manuellement la bille 1 centimètre au-dessus de son support, régler le niveaude la consigne en conséquence et l’ajuster jusqu’à sentir l’équilibre des forces. Lâcher alors labille.Utiliser le voltmètre ou la sonde de l’oscilloscope en cas dedysfonctionnement de l’asservisse-ment pour en déterminer la cause.Eteindre l’alimentation +-15V entre chaque tentative pouréviter l’échauffement de la bobineet pour réinitialiser l’asservissement (remise à 0 des intégrateurs).
Rangement en fin de TP :– Ranger les condensateurs dans leur boîte respective. Les résistances vont à la poubelle.– NE PAS DEBRANCHER LES CABLES DES CAPTEURS ET DE L’AMPLIFICA-
TEUR connectés sur l’alimentation du Maglev.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
TP 2 – Identification d’un système thermique et régulation PI
1 Objectif - Système étudié
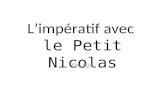
On se propose d’étudier un régulateur de température après avoir déterminé la fonction de trans-fert en boucle ouverte du processus à commander. L’étude expérimentale est réalisée à l’aide d’unemaquetteFeedback PT326Mk2qui simule un séchoir industriel.
1.1 Système à commander
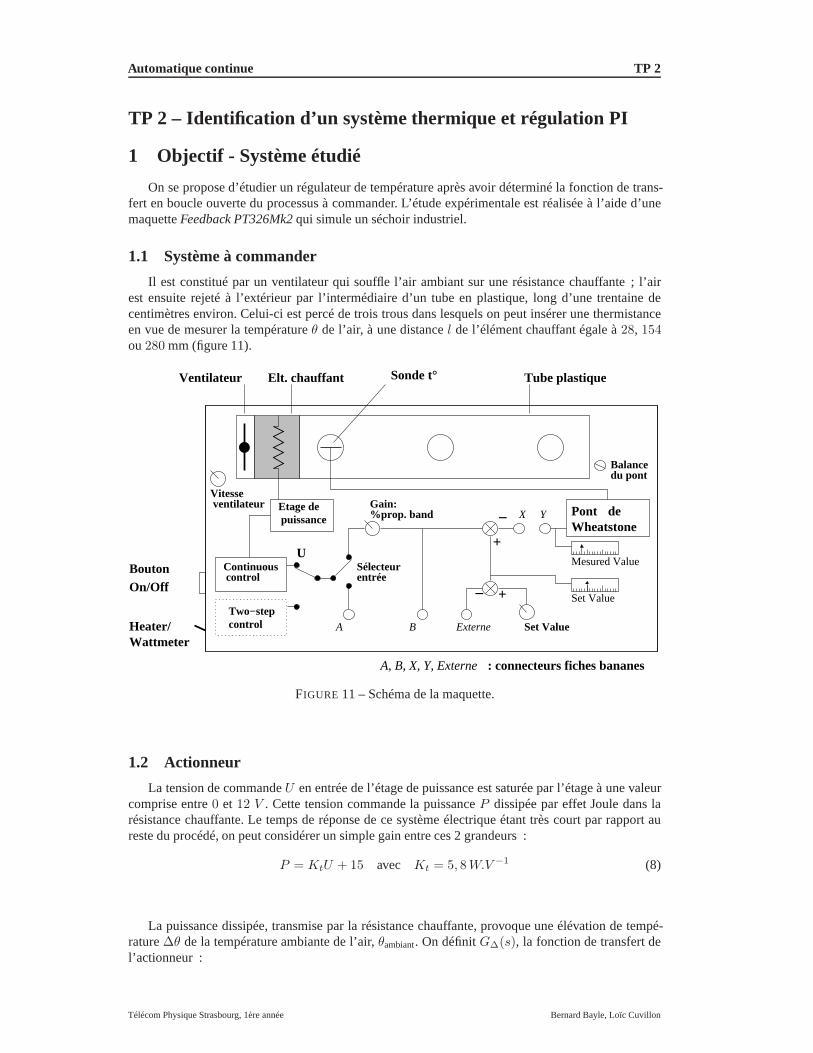
Il est constitué par un ventilateur qui souffle l’air ambiantsur une résistance chauffante ; l’airest ensuite rejeté à l’extérieur par l’intermédiaire d’un tube en plastique, long d’une trentaine decentimètres environ. Celui-ci est percé de trois trous danslesquels on peut insérer une thermistanceen vue de mesurer la températureθ de l’air, à une distancel de l’élément chauffant égale à28, 154ou280 mm (figure 11).
Pont deWheatstone
B
entréeSélecteur
Y
WattmeterHeater/
On/Off
Balancedu pont
Tube plastiqueVentilateur Sonde t°
Vitesseventilateur
X
Bouton
+
+−
−
Elt. chauffant
%prop. bandGain:
Two−stepcontrol
Continuouscontrol
puissanceEtage de
A Externe Set Value
: connecteurs fiches bananesA, B, X, Y, Externe
UMesured Value
Set Value
FIGURE 11 – Schéma de la maquette.
1.2 Actionneur
La tension de commandeU en entrée de l’étage de puissance est saturée par l’étage à une valeurcomprise entre0 et 12 V . Cette tension commande la puissanceP dissipée par effet Joule dans larésistance chauffante. Le temps de réponse de ce système électrique étant très court par rapport aureste du procédé, on peut considérer un simple gain entre ces2 grandeurs :
P = KtU + 15 avec Kt = 5, 8W.V −1 (8)
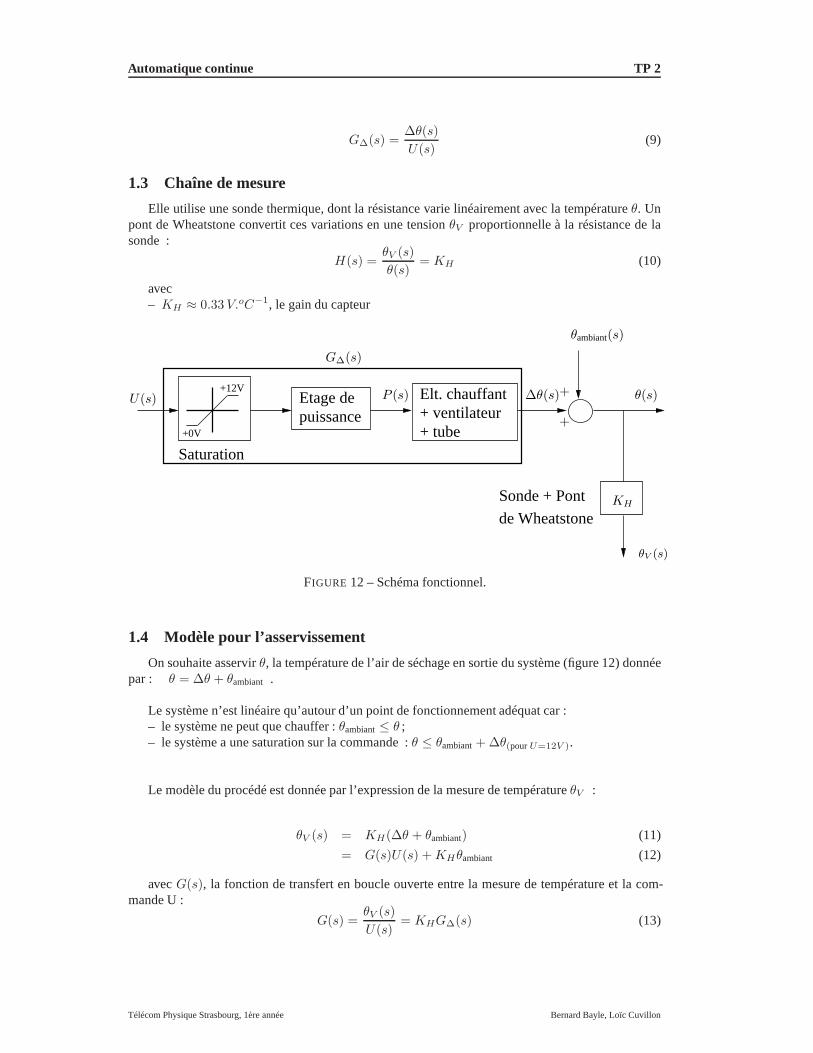
La puissance dissipée, transmise par la résistance chauffante, provoque une élévation de tempé-rature∆θ de la température ambiante de l’air,θambiant. On définitG∆(s), la fonction de transfert del’actionneur :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
G∆(s) =∆θ(s)
U(s)(9)
1.3 Chaîne de mesure
Elle utilise une sonde thermique, dont la résistance varie linéairement avec la températureθ. Unpont de Wheatstone convertit ces variations en une tensionθV proportionnelle à la résistance de lasonde :
H(s) =θV (s)
θ(s)= KH (10)
avec– KH ≈ 0.33V.oC−1, le gain du capteur
puissanceEtage de Elt. chauffant
+ ventilateur+ tube+0V
+12V
Saturation
Sonde + Pont
de Wheatstone
P (s)U(s) θ(s)
θambiant(s)
+
+
G∆(s)
∆θ(s)
KH
θV (s)
FIGURE 12 – Schéma fonctionnel.
1.4 Modèle pour l’asservissement
On souhaite asservirθ, la température de l’air de séchage en sortie du système (figure 12) donnéepar : θ = ∆θ + θambiant .
Le système n’est linéaire qu’autour d’un point de fonctionnement adéquat car :– le système ne peut que chauffer :θambiant≤ θ ;– le système a une saturation sur la commande :θ ≤ θambiant+∆θ(pourU=12V ).
Le modèle du procédé est donnée par l’expression de la mesurede températureθV :
θV (s) = KH(∆θ + θambiant) (11)
= G(s)U(s) +KHθambiant (12)
avecG(s), la fonction de transfert en boucle ouverte entre la mesure de température et la com-mande U :
G(s) =θV (s)
U(s)= KHG∆(s) (13)
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
On souhaite dans ce TP asservir la tensionθV , mesure de la températureθ, à une consignede températureθVref.
2 Préparation
Lors du TP, on cherchera à établir le modèle du système en boucle ouverte en analysant sa réponseindicielle (temporelle). Le but de la préparation est de prévoir l’allure des signaux.
Un document réponse pour la préparation est fourni. On peut s’aider de Matlab/Simulink.
2.1 Modélisation et Réponse indicielle en boucle ouverte
On suppose que le transfert en boucle ouverte incluant l’actionneur, le tube et le capteur peuts’écrire sous la forme :
G(s) =θV (s)
U(s)=
Ke−Ts
n∏
i=1
(1 + τis)
, n ≥ 1. (14)
Q-1 Que représente le termee−Ts ?Quel phénomène physique du système considéré est responsable de ce terme, sachant que savaleur numérique peut-être modifiée en changeant la position du capteur sur le tube (section1.1)?
Q-2 Tracer l’allure de la réponse indicielle dans les cas suivants :– n = 1 , τ = 1
6 ;– n = 2 , τ1 = τ2 = 1
6 ;– n = 2, τ1 = 1
6 ≫ τ2.
Q-3 Avec les hypothèses suivantes :
G(s) = θV (s)U(s) = 0.75
(1+τs)2 avecτ = 16 ;
U(t) : signal créneau de période 8s, d’amplitude2V et de composante continue 5 V.
(a) Tracer en pointillés la réponse temporelleθV (t), élévation de température du système enboucle ouverte pour la commandeU(t) en l’absence de température ambiante. (On peutconsidérer le théorème de superposition avec une commandeU , somme d’une constantede 4V et d’un signal carré compris entre 0 et 2V.)
(b) Soit KHθambiant = 0, 5V , la mesure de la température ambiante. Tracer alors en traitcontinu la réponde temporelle complèteθV (t), température de l’air mesurée par le cap-teur pour la commandeU(t) en présence d’une température ambiante non nulle.
Q-4 Uniquement à partir du tracé précédent deU(t) et θV (t) pour une température ambiante nonnulle, comment retrouver graphiquement le gain statique deG(s)?Proposer également une détermination graphique deτ , la constante de temps double du sys-teme (voir le cours ou l’abaque dans les sujets de TD). Que vaut ξ l’amortissement pour un telsystème?
2.2 Correction P et PI
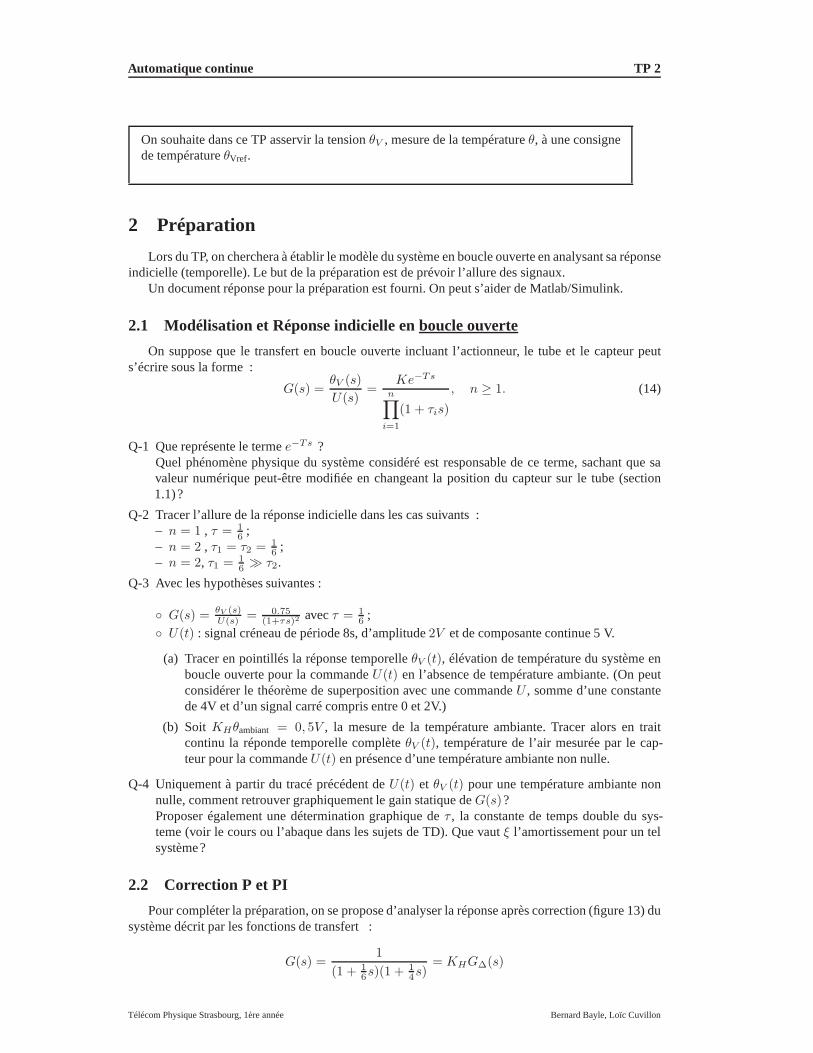
Pour compléter la préparation, on se propose d’analyser la réponse après correction (figure 13) dusystème décrit par les fonctions de transfert :
G(s) =1
(1 + 16s)(1 +
14s)
= KHG∆(s)
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
etKH = 1
On considère deux correcteurs :
1. un correcteur proportionnel :C(s) = Kp ;
2. un correcteur PI :C(s) = Kp
(1 + 14s)
s;
+
−
θV ref (s)C(s)
U(s)
+
θambiant
+ θV (s)KHG∆(s)
θ(s)∆θ(s)
FIGURE 13 – Modèle du procédé en boucle fermée
2.2.1 Réponse indicielle du système avec correcteur P
Q-5 Exprimer la transformée de Laplace de la mesureθV en fonction de la consigneθV ref et de laperturbation de sortieθambiantpour le système corrigé. On utilisera de préférence le théorème desuperposition :
θV (s) = BFref (s).θV ref (s) +BFambiant(s).θambiant (15)
Q-6 Calculer le gain statique de la fonction de transfertBFref si Kp = 1Par analogie avec la question Q-3, tracer alors sans calcul (les pôles du système bouclé sontproches de ceux de la boucle ouverte pourKp faible) et en pointillés la réponse du systèmebouclé pour : Kp = 1 pour le correcteur proportionnel ; une consigneθV ref (t), signal créneau, de période 8s, d’amplitude2V et de composante conti-
nue5V ; θambiant= 0, ici.
Q-7 Quelle est l’erreur statique en % de la valeur finale avec ce correcteur ?
Q-8 Calculer maintenant le gain statique de la fonction de transfertBFambiant. Sachant queθambiant=0, 5 est constant, en déduire la contribution constante deθambiantà la mesureθV .
Q-9 Par le théorème de superposition, tracer finalement la réponse du système pour la consigne et laperturbation de sortie simultanément.
2.2.2 Réponse indicielle du système avec correcteur PI
Q-10 Justifier le choix du zéro dans le correcteur PI vis-à-vis de l’expression deG(s) .
Q-11 Donner l’expression des nouvelles fonctions de transfertBFref etBFambiantavec le correcteurPI.
Q-12 Calculer le gain statique de ces fonctions de transfertpour un gain du PIKp = 2. Tracer enconséquence la réponse approximative du système à la consigneθV ref (t) avec la perturbationde sortie constanteθambiant= 0, 5.
Q-13 Quelle est l’erreur statique en présence d’un correcteur avec intégrateur vis-à-vis de la consigne?vis-à-vis de la perturbation de sortie?
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 2
3 Manipulation
3.1 Configuration de la maquette pour le TP
– La maquette est mise sous tension (on !) ;– L’interrupteur latéral est en position "Heater" seul ;– La sonde est placée au plus près de l’élément chauffant, etalignée(trait noir parallèle au flux
d’air dans le tube) ;– La vitesse du ventilateur est réglée sur= 4 ;– Le gain variable de la maquette est réglé sur 1 ("% proportionnal gain" à100%) ;– Le potentiomètre "Set Value" est sur 0 ;– L’entrée "Internal" est inactive (LED correspondante éteinte) ;
3.2 Calibration de la maquette (si nécessaire)
– Régler le bouton balance pour qu’en l’absence de commande sur le système, l’afficheur à ai-guille connecté sur la mesureθV = Y indique 20oC.
– Faire varier la valeur deY en agissant sur la tension "Set Value".– Remettre "Set Value" sur 0 et vérifier que l’afficheur surY indique de nouveau 20oC. Relever
éventuellement la tensionY correspondant à l’affichage de 20oC (= KHθambiant).
3.3 Système sans retard
3.3.1 Identification du procédé en boucle ouverte :G(s)
Conditions de manipulation : La commande est appliquée sur l’entrée "External" et les sélecteurs d’entrée (interrupteurs)
positionnés de manière à commander l’étage de puissance en mode continu. On prendra les même caractéristiques (forme, amplitude) pour la commandeU(t) issue du
GBF que celles de la préparation, à l’exception de :– la période que l’on adaptera au temps de réponse du système réel.– l’offset que l’on prendra négatif : -5V (la raison ci-dessous).
Sur la maquette, l’entrée "External" passe malheureusement par un inverseur avant l’étagede puissance. On est malin : on compense cet inverseur en utilisant un offset négatif pour le signal de commande
appliqué. on utilise l’option "Inverse On" sur l’oscilloscope pour visualiser, non pas le signal ap-
pliqué mais son inverse : le signal de commande réel sur l’étage de puissance.
M-1 Visualiser à l’oscilloscope, la commande appliquée à l’étage de puissance et la mesure de tem-pératureθV = Y . Utiliser le déclenchement (trigger) ou stopper l’acquisition pour permettre lamesure.Identifier un modèle pourG(s) d’après les conclusions de votre préparation. On notera quepourun système ayant un pôle doubleτ , le temps de réponse à 30% de la valeur finale vaut2.45τ .
M-2 On souhaite simuler la réponse du systèmeG(s) sur un signal carré d’offset nul. On proposed’utiliser la fonctionstep de matlab.
G=tf... % la fonction identifiéestep(G,8) % reponse indicielle sur 8s
On veut valider notre modèle en le comparant à un ensemble de points relevé sur l’oscilloscope.On prend pour référence des temps et d’amplitude la base d’unfront montant (on peut utiliserles curseurs en mode appariés de l’oscilloscope).
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
(a) Photo du bloc
out
in
out
in
0o
180o
ErrorInput
derivative
++
out
in +
OutputIntegral
integral
OutputDerivative
OutputError
−1
Output
proportional
τd × 1
Kp × 1
×10
τi × 1
×10
×10
1τi s
τd s
Kp
(b) Schéma de principe
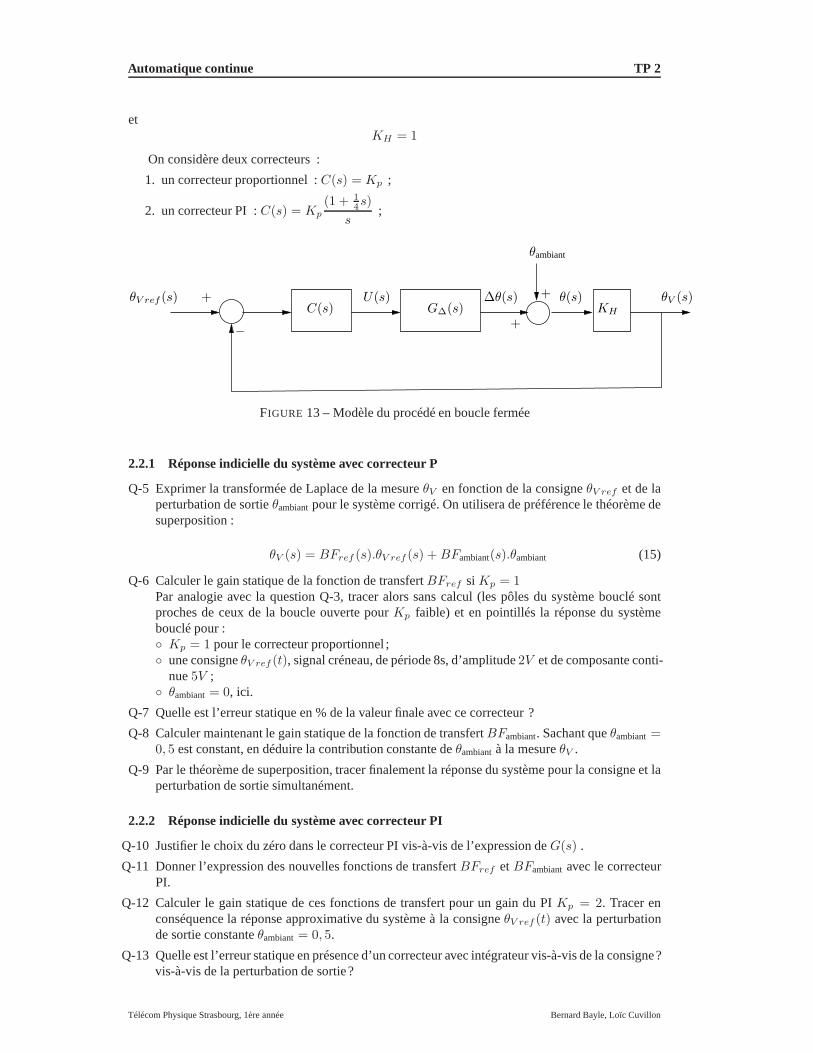
FIGURE 14 – Bloc correcteur PID
hold on %conserver le tracé sur la figureplot([0 0.5 8 10 12],[0 5.1 3.3 4 3.9],’r’) %tracé des pts rele vés
Usage du PC Lunix et de matlab : login/mot de passe : ensps/ulp L’icône matlab démarre la fenêtre de commande matlab. Cetteversion n’a pas d’éditeur
intégré.On exécute un .m en tapant son nom sans l’extension dans la ligne de commande, si lefichier est dans le répertoire courant de matlab.
L’éditeur de texte (icône bloc note) permet d’écrire vos fichiers .m . Commandes matlab utiles (et linux) :
– ls , lister le contenu du répertoire courant– cd .. oucd toto , aller dans le répertoire supérieur ou dans le répertoire toto– pwd, afficher le nom du répertoire courant
Simulink démarre avec la commandesimulink . Si la bibliothèque de blocs n’est pasvisible, chercher ’show Library’ dans les menus de la fenêtresimulink .
Aide de matlab :help nom_de_la_fonction ou ouvrir la fenêtre d’aide parhelpwin .
Faire valider vos résultats.
3.3.2 Correction proportionnelle
On asservit le système avec un correcteur proportionnel. Lesignal de consigne est toujours lemême signal que celui utilisé pour l’identification.
M-4 A l’aide du lieu des racines tracé avecMatlab (commanderltool ou rltool(G) ), réglerle gain d’un correcteur proportionnel pour obtenir un amortissement en boucle fermée de0, 6pour notre système. Noter la position des pôles correspondants. Connaissant la position despôles désirés, par quel calcul aurions-nous pu retrouver lagain proportionnel correspondant?Afficher alors la réponse indicielle du système bouclé (cocher "step" en bas du tracé du lieu.)
M-5 Simuler sous Simulink, la réponse du système bouclé pourla consigne créneau utilisée. Visua-liser avec un ou des scopes la consigne et la sortie mais aussila commande et l’erreur.
M-6 Expérimenter sur la maquette.On utilise :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
– l’alimentation +-15V.– le bloc PID (figure 14) avec ses interrupteurs et potentiomètres permet de créer la fonction
de transfert désirée. On vérifiera rapidement que le gain proportionnel effectif du bloc cor-respond à la valeur indiquée par le bouton en plastique1. On pensera à relier le potentiel deréférence du bloc avec celui de la maquette.
– le sommateur sur la maquette et le sélecteur d’entrée pour positionner le bloc PID entre lesconnecteurs A et B.
Visualiser en fonction de la consigne, la sortie (la température mesurée) ainsi que le signal decommande et d’erreur.
M-7 Comparer aux résultats attendus par la théorie et la simulation.
Faire valider vos résultats.
3.3.3 Correction proportionnelle - intégrale
M-8 A l’aide du lieu des racines tracé avecMatlab (commanderltool ou rltool(G) ), réglerle gain d’un correcteur PI pour obtenir un amortissement en boucle fermée de0, 6 pour notresystème. On compense le pôle lent.
M-9 Simuler sous Simulink, le système bouclé. Visualiser avec un ou des scopes la consigne et lasortie mais aussi la commande et l’erreur.
M-10 Expérimenter sur la maquette.Calculer la fonction de transfert du bloc PID en configuration PI. Si sa forme est différente decelle du correcteur obtenu avecrltool , calculer le gainKp et la constanteτi à régler sur lebloc.
Visualiser en fonction de la consigne, la sortie (la température mesurée) ainsi que le signal decommande et d’erreur.
M-11 Comparer aux résultats attendus par la théorie et la simulation. Que dire du signal d’erreur ?
Faire valider vos résultats.
3.4 Système avec retard
3.4.1 Identification du modèle
On place cette fois la sonde au milieu du tube, puis à l’extrémité du tube (l = 154 mm, l = 280mm).
M-12 Identifier le retard pour chacune des positions de la sonde. Identifier alors hors retard, le restede la fonction de transfert pour chacune des positions.
3.4.2 Correction PI d’un système à retard
M-13 Simuler le système avec retard soussimulink et essayer par itération de régler un correcteur.On ne peut utiliser le lieu des racines car en continu et avec un retard, ce ne sont plus les racinesd’un polynôme rationnel mais d’une fonction irrationnel (e−Ts) qu’il faut calculer.Visualiser avec un ou des scopes la consigne et la sortie maisaussi la commande et l’erreur.
M-14 Expérimenter sur la maquette.Comparer aux résultats attendus par la simulation. Que diredu signal d’erreur ?
Faire valider vos résultats.
1. Si l’écart est grand, il est probable que le bouton plastique soit décentré. Voir avec l’encadrant.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
TP 3 – Identification et commande d’un système de positionne-ment
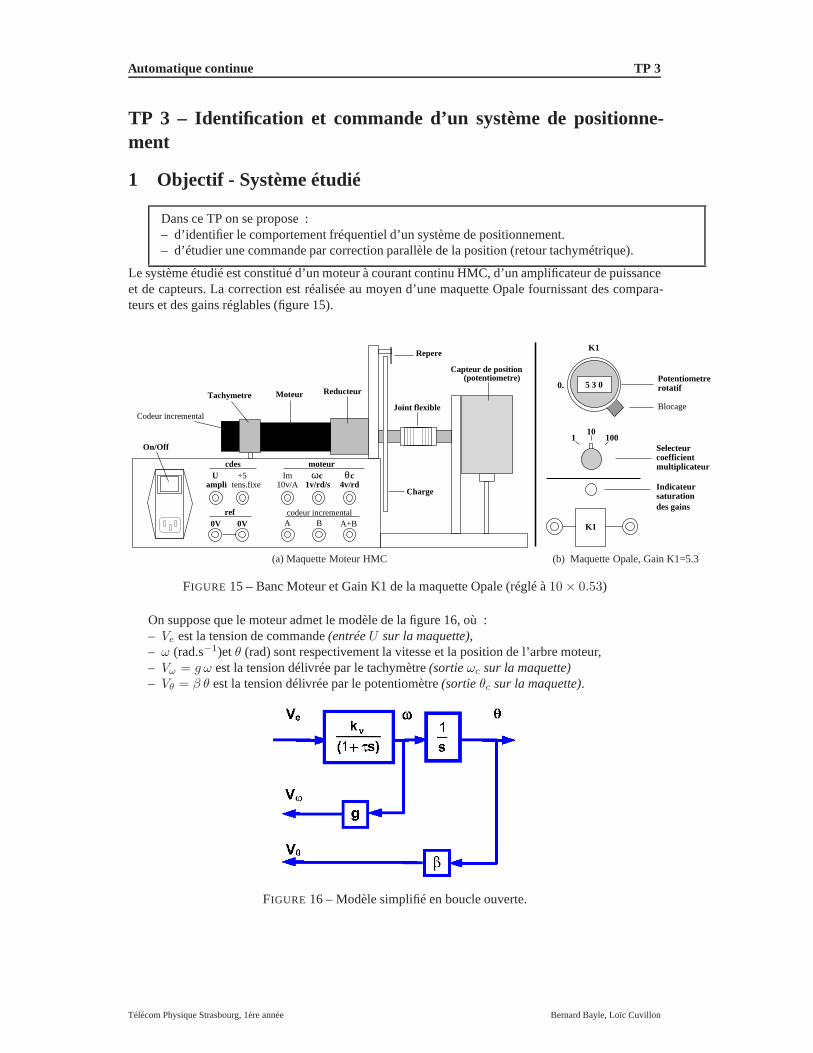
1 Objectif - Système étudié
Dans ce TP on se propose :– d’identifier le comportement fréquentiel d’un système de positionnement.– d’étudier une commande par correction parallèle de la position (retour tachymétrique).
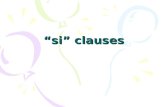
Le système étudié est constitué d’un moteur à courant continu HMC, d’un amplificateur de puissanceet de capteurs. La correction est réalisée au moyen d’une maquette Opale fournissant des compara-teurs et des gains réglables (figure 15).
MoteurTachymetre Reducteur
Capteur de position(potentiometre)
Charge
ref
cdesU
ampli
0V 0V
+5tens.fixe
BA A+Bcodeur incremental
moteur
1v/rd/s 4v/rdIm ωc θc
10v/A
On/Off
Codeur incremental
Repere
Joint flexible
(a) Maquette Moteur HMC
0.
10010
1
Potentiometre rotatif
Selecteurcoefficientmultiplicateur
K1
Blocage
K1
des gainssaturationIndicateur
5 3 0
(b) Maquette Opale, Gain K1=5.3
FIGURE 15 – Banc Moteur et Gain K1 de la maquette Opale (réglé à10× 0.53)
On suppose que le moteur admet le modèle de la figure 16, où :– Ve est la tension de commande(entréeU sur la maquette),– ω (rad.s−1)etθ (rad) sont respectivement la vitesse et la position de l’arbre moteur,– Vω = g ω est la tension délivrée par le tachymètre(sortieωc sur la maquette)– Vθ = β θ est la tension délivrée par le potentiomètre(sortieθc sur la maquette).
FIGURE 16 – Modèle simplifié en boucle ouverte.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
2 Préparation
2.1 Réponse du système en boucle ouverte
Lors du TP, on utilisera un signal d’entrée composé d’une seule fréquence et une composantecontinue pour identifier le comportement fréquentiel (diagramme de Bode). On cherche ici à prévoirl’allure deVω et deVθ, en régime établi :
– siVe est sinusoïdal de valeur moyenne nulle (quasi-nulle en réalité en sortie du GBF).– siVe est sinusoïdal de valeur moyenne non nulle (contient une composante continue).
Q-1 Pourquoi est-il presque impossible de mesurer directementVθ en régime sinusoïdal ? Pourquoiest-il préférable de mesurerVω ?
On effectuera donc lors du TP, la mesure deVω , à partir de laquelle on cherchera à déduireVθ.
Q-2 Montrer que si les gains des capteursg et β sont connus, on peut calculer, pour une fréquence
d’excitationf donnée, le gain|Vθ
Ve
|dB et le déphasageΦ(Ve, Vθ) à partir de la mesure de|Ve|,
|Vω | etΦ(Ve, Vω).
Q-3 Quel est le comportement harmonique théorique du système (allure du diagramme de Bode en
gain et phase pourVθ
Ve
) ?
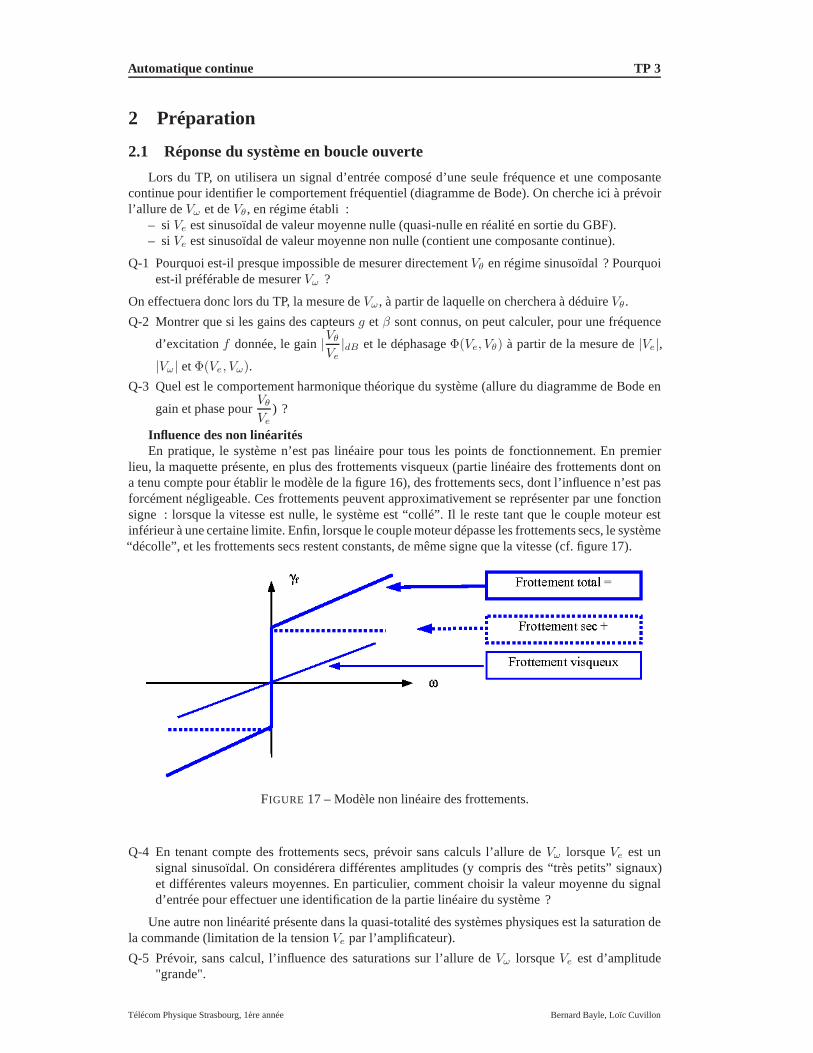
Influence des non linéaritésEn pratique, le système n’est pas linéaire pour tous les points de fonctionnement. En premier
lieu, la maquette présente, en plus des frottements visqueux (partie linéaire des frottements dont ona tenu compte pour établir le modèle de la figure 16), des frottements secs, dont l’influence n’est pasforcément négligeable. Ces frottements peuvent approximativement se représenter par une fonctionsigne : lorsque la vitesse est nulle, le système est “collé”.Il le reste tant que le couple moteur estinférieur à une certaine limite. Enfin, lorsque le couple moteur dépasse les frottements secs, le système“décolle”, et les frottements secs restent constants, de même signe que la vitesse (cf. figure 17).
FIGURE 17 – Modèle non linéaire des frottements.
Q-4 En tenant compte des frottements secs, prévoir sans calculs l’allure deVω lorsqueVe est unsignal sinusoïdal. On considérera différentes amplitudes(y compris des “très petits” signaux)et différentes valeurs moyennes. En particulier, comment choisir la valeur moyenne du signald’entrée pour effectuer une identification de la partie linéaire du système ?
Une autre non linéarité présente dans la quasi-totalité dessystèmes physiques est la saturation dela commande (limitation de la tensionVe par l’amplificateur).
Q-5 Prévoir, sans calcul, l’influence des saturations sur l’allure deVω lorsqueVe est d’amplitude"grande".
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
Q-6 En conclusion, quelles sont les conditions surVe (en régime sinusoïdal) pour que le comporte-ment du système soit le plus linéaire possible ?
2.2 Comportement en boucle fermée
2.2.1 Asservissement proportionnel
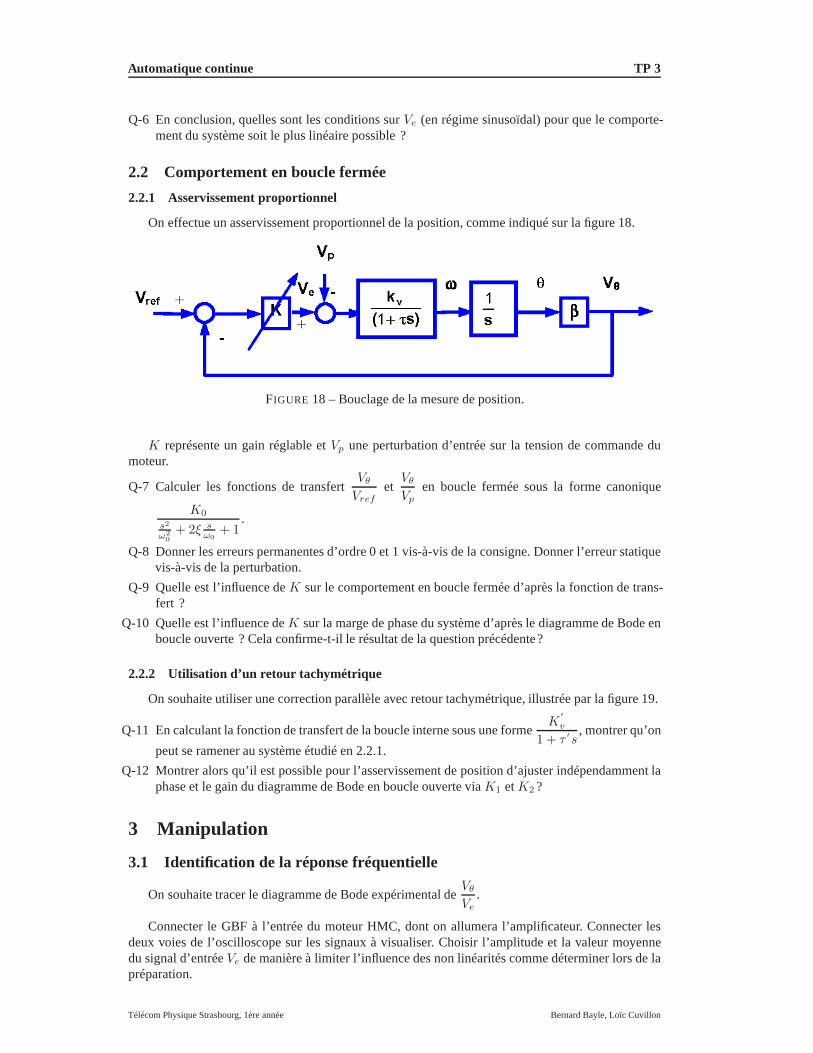
On effectue un asservissement proportionnel de la position, comme indiqué sur la figure 18.
FIGURE 18 – Bouclage de la mesure de position.
K représente un gain réglable etVp une perturbation d’entrée sur la tension de commande dumoteur.
Q-7 Calculer les fonctions de transfertVθ
Vref
etVθ
Vp
en boucle fermée sous la forme canonique
K0
s2
ω2
0
+ 2ξ sω0
+ 1.
Q-8 Donner les erreurs permanentes d’ordre 0 et 1 vis-à-vis de la consigne. Donner l’erreur statiquevis-à-vis de la perturbation.
Q-9 Quelle est l’influence deK sur le comportement en boucle fermée d’après la fonction de trans-fert ?
Q-10 Quelle est l’influence deK sur la marge de phase du système d’après le diagramme de Bode enboucle ouverte ? Cela confirme-t-il le résultat de la question précédente?
2.2.2 Utilisation d’un retour tachymétrique
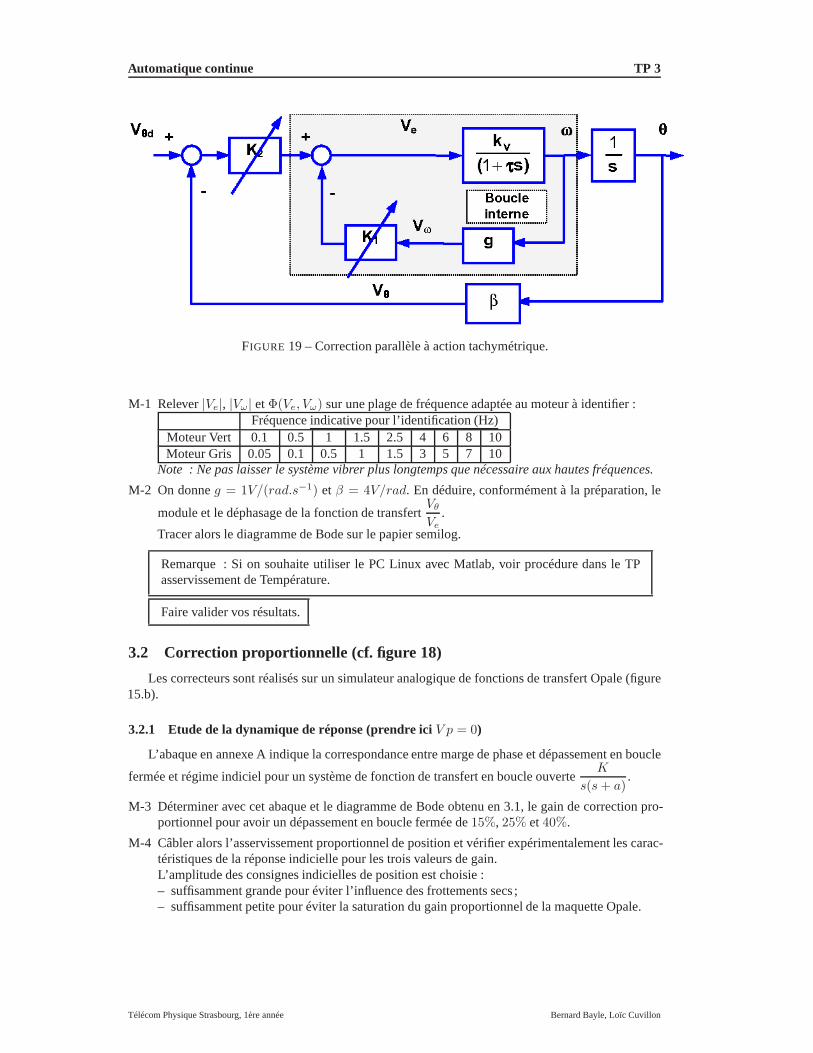
On souhaite utiliser une correction parallèle avec retour tachymétrique, illustrée par la figure 19.
Q-11 En calculant la fonction de transfert de la boucle interne sous une formeK
′
v
1 + τ ′s, montrer qu’on
peut se ramener au système étudié en 2.2.1.
Q-12 Montrer alors qu’il est possible pour l’asservissement de position d’ajuster indépendamment laphase et le gain du diagramme de Bode en boucle ouverte viaK1 etK2 ?
3 Manipulation
3.1 Identification de la réponse fréquentielle
On souhaite tracer le diagramme de Bode expérimental deVθ
Ve
.
Connecter le GBF à l’entrée du moteur HMC, dont on allumera l’amplificateur. Connecter lesdeux voies de l’oscilloscope sur les signaux à visualiser. Choisir l’amplitude et la valeur moyennedu signal d’entréeVe de manière à limiter l’influence des non linéarités comme déterminer lors de lapréparation.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
FIGURE 19 – Correction parallèle à action tachymétrique.
M-1 Relever|Ve|, |Vω| etΦ(Ve, Vω) sur une plage de fréquence adaptée au moteur à identifier :Fréquence indicative pour l’identification (Hz)
Moteur Vert 0.1 0.5 1 1.5 2.5 4 6 8 10Moteur Gris 0.05 0.1 0.5 1 1.5 3 5 7 10
Note : Ne pas laisser le système vibrer plus longtemps que nécessaire aux hautes fréquences.
M-2 On donneg = 1V/(rad.s−1) et β = 4V/rad. En déduire, conformément à la préparation, le
module et le déphasage de la fonction de transfertVθ
Ve
.
Tracer alors le diagramme de Bode sur le papier semilog.
Remarque : Si on souhaite utiliser le PC Linux avec Matlab, voir procédure dans le TPasservissement de Température.
Faire valider vos résultats.
3.2 Correction proportionnelle (cf. figure 18)
Les correcteurs sont réalisés sur un simulateur analogiquede fonctions de transfert Opale (figure15.b).
3.2.1 Etude de la dynamique de réponse (prendre iciV p = 0)
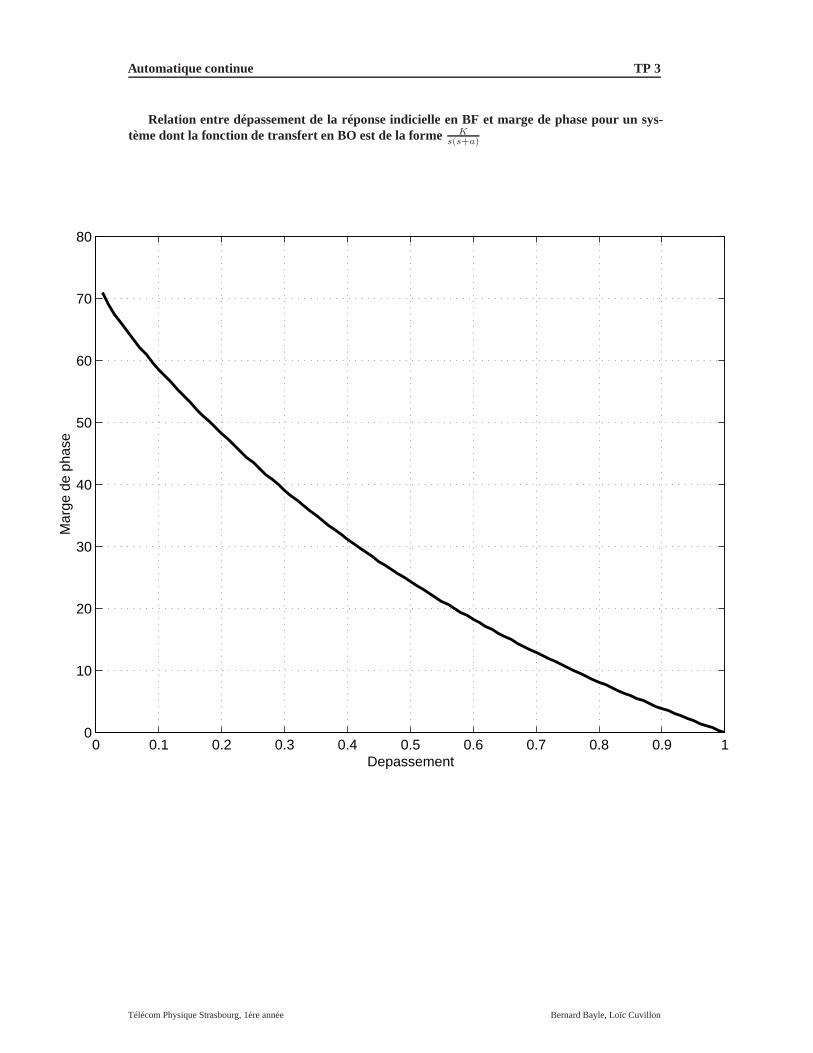
L’abaque en annexe A indique la correspondance entre marge de phase et dépassement en boucle
fermée et régime indiciel pour un système de fonction de transfert en boucle ouverteK
s(s+ a).
M-3 Déterminer avec cet abaque et le diagramme de Bode obtenuen 3.1, le gain de correction pro-portionnel pour avoir un dépassement en boucle fermée de15%, 25% et40%.
M-4 Câbler alors l’asservissement proportionnel de position et vérifier expérimentalement les carac-téristiques de la réponse indicielle pour les trois valeursde gain.L’amplitude des consignes indicielles de position est choisie :– suffisamment grande pour éviter l’influence des frottements secs;– suffisamment petite pour éviter la saturation du gain proportionnel de la maquette Opale.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
Usage de la maquette Opale : Allumer la maquette et relier son potentiel de référence à celui du moteur. Utiliser a priori uniquement les comparateurs et gains de lacolonne de gauche. Une LED rouge s’allume si un des gains de la colonne correspondante est saturé. On
peut tester son bon fonctionnement avec le bouton "Test voyant". Voir figure 15 pour la procédure de réglage des gains.
Faire valider vos résultats.
3.2.2 Etude de la précision statique
M-5 Vis-à-vis de la consigne (prendre iciV p = 0)Pour un gain correspondant à un dépassement prévu de15%, mesurer l’erreur statique vis-à-visde la consigne. En quoi l’erreur n’est elle pas conforme aux prévisions théoriques ? Pourquoi ?
M-6 Vis-à-vis de la perturbation (prendre iciV ref = 0 et enter avec le GBF surV p)Régler le gain pour un dépassement prévu de40%. Etudier la précision statique vis-à-vis del’entrée de perturbation. Tracer la courbe donnant l’erreur statique en fonction de l’amplitudede l’échelon de perturbation. Est-ce cohérent avec la théorie?
3.3 Correction tachymétrique
3.3.1 Réglage de la commande
On souhaite obtenir une marge de phase de50o avec une fréquence de coupure en boucle ouvertede4 Hz. On procède pour cela à un réglage expérimental deK1 etK2.
M-7 Câbler d’abord la boucle de vitesse interne comme dans leschéma à action tachymétrique.Avec une entrée sinusoïdale à4 Hz, régler le gainK1 pour obtenir le déphasage voulu entre laconsigne de vitesse etVω. Relever le moduleG0 du gain entre la consigne de vitesse etVω àcette fréquence.
M-8 Déterminer le gainK2 à partir deG0 (connaissantg etβ).
M-9 Câbler maintenant la boucle de position externe.Appliquer une consigne en position constituée par un signalcarré et relever les caractéristiquesde la réponse indicielle. Le dépassement correspond-il à cequi était prévu ?Note : Du fait d’un jeu dans le réducteur, le système peut se mettre à osciller. Dans ce casdiminuerK2. Ne pas laisser le système vibrer trop longtemps.
Faire valider vos résultats.
3.3.2 Erreurs d’ordre 1
M-10 Appliquer une consigne en position constituée par un signal triangulaire, de composante conti-nue nulle, et d’amplitude±5 V.Relever l’erreur permanente d’ordre 1 ( pendant les phases “montantes” et les phases “descen-dantes” ) en faisant varier la fréquence du signal pour fairevarier la pente.
M-11 Tracer la courbe donnant l’erreur permanente d’ordre 1en fonction de la pente de la consigne(positive et négative) . Comparer aux prévisions théoriques.
Faire valider vos résultats.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
Relation entre dépassement de la réponse indicielle en BF etmarge de phase pour un sys-tème dont la fonction de transfert en BO est de la forme K
s(s+a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
Depassement
Mar
ge d
e ph
ase
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 4
TP Matlab en auto-formationSynthèses fréquentielle et par placement de pôles
Objectif
Les TP étant finis, ce dernier sujet vous permettra de vous auto-évaluer sur des problèmes assezsimples d’Automatique, simulés avecMatlab. L’objectif est de bien comprendre les correspondancesentre les différentes représentations des systèmes, et d’effectuer une synthèse d’asservissement enconsidérant les diagrammes de Bode et le lieu des pôles en boucle fermée (lieu des racines). Pourpréparer ce TP il est conseillé de revoir les cours et TDs sur les systèmes linéaires et sur le lieu desracines.
1 Relation entre valeurs des pôles et des zéros, réponse fréquen-tielle et réponse indicielle
Cette partie ne doit pas vous prendre plus d’une heureLa manipulation consiste à simuler sousMatlab différentes fonctions de transfert linéaires, et à
visualiser leurs cartes de pôles et zéros (fonctionpzmap), leur réponse indicielle (fonctionstep ) etleur réponse fréquentielle (fonctionsnyquist etbode ).
La boîte à outilsControl deMatlab permet de manipuler des objets symboliques représentant desfonctions de transfert linéaires continues ou échantillonnées (notion deLTIMODEL). La commandetf permet de créer un système continu ou discret en donnant les coefficients des polynômes aunumérateur et au dénominateur. Utiliser l’aide en ligne (help tf ) pour plus d’informations.
Liste des fonctions de transferts continues à simuler :
1
1 + s,
1
1 + 0, 1s,1
s,
1
1− 10s,
1
1− s. Où sont les pôles des systèmes stables ? Comment
reconnaît-on un intégrateur sur la carte des pôles et des zéros ? Quelle est sa réponse indi-cielle ? Est-il stable ?
1
1 + s,
1
1 + 0, 1s,
1
1 + 0, 01s. Où sont les pôles des systèmes rapides ? Entre deux systèmes
de bandes passantes différentes, quel est le plus lent ?
1
1 + 2ξs
ω0+
s2
ω20
, en prenant d’abordω0 constant etξ variable, puis l’inverse. Où sont les pôles
d’un système du second ordre sur-amorti ? Même question pourun système sous-amorti. Oùsont les paires de pôles ayant mêmeω0 ? Mêmeξ ? Quel est l’intérêt de l’abaque tracé par lafonctionsgrid ?
1 + 10s
1 + s+ s2,1 + 0, 9s
1 + s+ s2,1 + 0, 01s
1 + s+ s2,
s
1 + s+ s2,
1− s
1 + s+ s2. Etudiez l’influence des zéros en
fonction de leur position sur la carte pôles - zéros ? A quoi reconnaît-on la réponse indicielled’un système à déphasage non minimal ?
Expliquer la notion de pôle dominant. Dans une paire de pôlescomplexes conjugués, lequeldomine ?
2 Identification d’un système
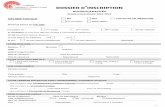
On considère un système dont on a obtenu les diagrammes de Bode suivants par une mesure enrégime harmonique.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 4
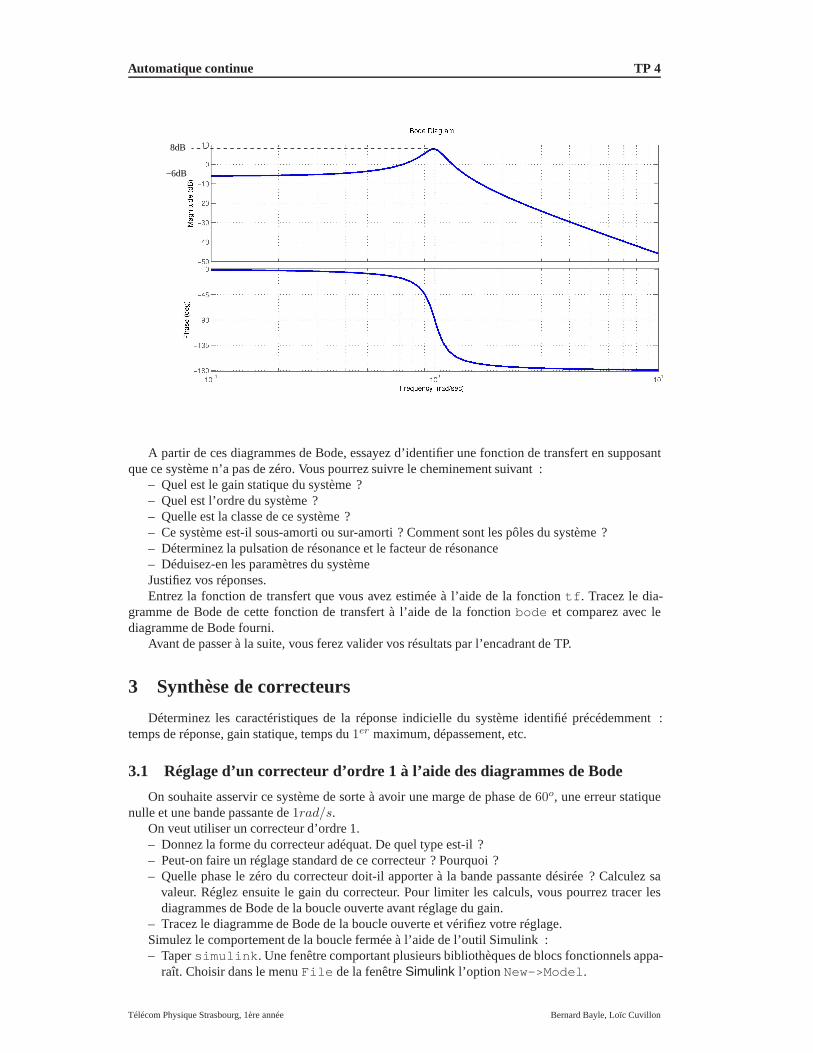
8dB
−6dB
A partir de ces diagrammes de Bode, essayez d’identifier une fonction de transfert en supposantque ce système n’a pas de zéro. Vous pourrez suivre le cheminement suivant :
– Quel est le gain statique du système ?– Quel est l’ordre du système ?– Quelle est la classe de ce système ?– Ce système est-il sous-amorti ou sur-amorti ? Comment sontles pôles du système ?– Déterminez la pulsation de résonance et le facteur de résonance– Déduisez-en les paramètres du systèmeJustifiez vos réponses.Entrez la fonction de transfert que vous avez estimée à l’aide de la fonctiontf . Tracez le dia-
gramme de Bode de cette fonction de transfert à l’aide de la fonction bode et comparez avec lediagramme de Bode fourni.
Avant de passer à la suite, vous ferez valider vos résultats par l’encadrant de TP.
3 Synthèse de correcteurs
Déterminez les caractéristiques de la réponse indicielle du système identifié précédemment :temps de réponse, gain statique, temps du1er maximum, dépassement, etc.
3.1 Réglage d’un correcteur d’ordre 1 à l’aide des diagrammes de Bode
On souhaite asservir ce système de sorte à avoir une marge de phase de60o, une erreur statiquenulle et une bande passante de1rad/s.
On veut utiliser un correcteur d’ordre 1.– Donnez la forme du correcteur adéquat. De quel type est-il ?– Peut-on faire un réglage standard de ce correcteur ? Pourquoi ?– Quelle phase le zéro du correcteur doit-il apporter à la bande passante désirée ? Calculez sa
valeur. Réglez ensuite le gain du correcteur. Pour limiter les calculs, vous pourrez tracer lesdiagrammes de Bode de la boucle ouverte avant réglage du gain.
– Tracez le diagramme de Bode de la boucle ouverte et vérifiez votre réglage.Simulez le comportement de la boucle fermée à l’aide de l’outil Simulink :– Tapersimulink . Une fenêtre comportant plusieurs bibliothèques de blocs fonctionnels appa-
raît. Choisir dans le menuFile de la fenêtreSimulink l’option New->Model .
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 4
– Construire le modèle du système en boucle fermée comprenant le systèmeGH et le correcteurdéterminé précédemment. Pour cela, on cherche dans les bibliothèques deSimulink les diffé-rents blocs (fonction de transfert, gain, sommateur, oscilloscope) que l’on fait glisser dans lemodèle.
– Afficher la réponse indicielle du système en boucle fermée pour un échelon unitaire : lessignaux d’entrée se trouvent dans la bibliothèque "sources". Les outils de visualisation (utiliserun scope) dans la bibliothèque "sinks".
Que pensez-vous de la réponse ? Est-ce satisfaisant ?
3.2 Réglage à l’aide du lieu des racines
On se propose d’utiliser un correcteur PI. On souhaite obtenir un temps d’établissement à5% del’ordre d’une seconde et un dépassement inférieur à25%.
Vous allez régler ce correcteur à l’aide derltool , qui est un outil de synthèse de correcteur parle lieu des pôles :
– Tapezrltool . Alors, la fenêtrerltool comportant un lieu d’Evans vierge apparaît.– Choisir dans le menuFile de la fenêtrerltool la commandeImport Model . Placer
dans le processus à asservir,G, le modèle degh , puis cliquerOK. La fenêtrerltool traceautomatiquement le lieu d’Evans du système.
– On peut faire varier le gain de la boucle ouverte soit en changeant la valeur de la caseC(s)dans la fenêtrerltool , soit en faisant glisser les pôles sur le lieu d’Evans.
– Pour ajouter les pôles et zéros nécessaires au lieu d’Evanscliquer sur la case correspondantaux pôles ou zéros, puis cliquer sur le lieu d’Evans à l’endroit où l’on souhaite les placer. Onpourra ensuite faire glisser ce zéro et observer comment se déforme le lieu d’Evans.
– Cliquez surAnalysis -> response to step command . Une nouvelle fenêtre appe-léeLTI viewer apparaît et contient la réponse indicielle de la boucle fermée.
Peut-on respecter le cahier des charges ?Que pensez-vous du temps d’établissement de la boucle fermée ?Pourquoi est-ce une mauvaise idée d’utiliser un correcteurPI ?
3.3 Correcteur proportionnel - intégral - dérivé (PID "généralisé")
On se propose d’utiliser un correcteur PID généralisé.– Première stratégie de réglage : compensation de pôles
Dans un premier temps, on choisit de compenser les pôles du système par les zéros du cor-recteur. Régler le correcteur pour que le dépassement soit égal à5% et que le temps d’établis-sement soit de l’ordre de 1s. Afin de bien filtrer les bruits, onimpose que l’amplification ducorrecteur en hautes fréquence soit restreinte (la fréquence du pôle du correcteur ne doit pasêtre supérieure à 100 fois celle de ses zéros)Pour évaluer la robustesse du réglage, on étudie l’effet du correcteur sur un système légère-ment différent (fonction de transfert mal identifiée en raison de l’usure du système). Essayer lecorrecteur (sans le modifier) sur le système suivant :
GH2(s) =0.237
s2 + 0.2338s+ 0.5942
– Deuxième stratégie de réglage : placement de pôlesAfin de gagner en robustesse, on utilise cette fois les zéros complexes conjugués pour éloignerles pôles du système bouclé de l’axe imaginaire.Etudier les déformations du Lieu d’Evans produites par le déplacement des zéros du correcteur.Régler le correcteur pour respecter le cahier des charges (dépassement inférieur à 25% et tempsd’établissement à 5% inférieur à 1s) . Evaluer sa robustesseen considérant les deux modèlesdu système.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 4
4 Simulation du système en boucle fermée
On souhaite tester les 2 correcteurs PID obtenus précédemment.– Construire avec Simulink le modèle du système en boucle fermée comprenant le systèmeGH
et les correcteurs PID déterminés précédemment.– Afficher la réponse indicielle du système en boucle fermée pour un échelon unitaire.– Observez le signal de commande en plaçant un oscilloscope.Qu’en pensez-vous ? En pratique,
la commande est limitée entre−20 et+20. Pour cela ajoutez un bloc de saturation que voustrouverez dans la bibliothèque "non linear". Observez l’effet des saturations. Qu’en concluez-vous ?
– Les correcteurs PID permettent-ils de rejeter les perturbations d’entrée constantes ? Justifiezvotre réponse. Simulez le système avec des perturbations d’entrée constantes.
– Etudier la robustesse des différents correcteurs en remplaçant la fonction de transfertGH parGH2.
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 1
Feuille de préparation TP 1
Mise en équation du système
1. Linéarisation du modèle :
2. Caractérisation, fonction de transfert et analyse :
3. Stabilité :
Asservissement de courant du système :
1. Constante de temps, temps de réponse en courant :
2. Calcul deKpi etKii :
Asservissement de position du système :
1. Calcul deKpx, Kix etKdx :
Electronique :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 1
1. Calcul du PI :
2. Calcul du PID :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
Feuille de préparation TP 2
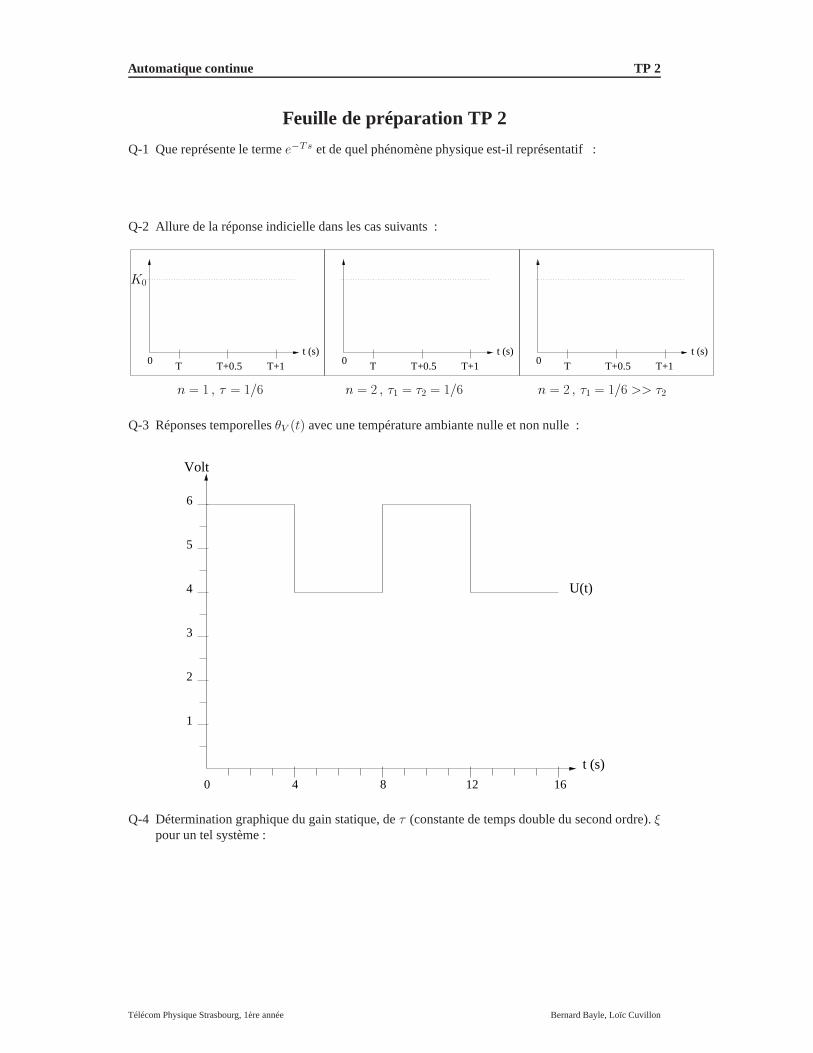
Q-1 Que représente le termee−Ts et de quel phénomène physique est-il représentatif :
Q-2 Allure de la réponse indicielle dans les cas suivants :
0 T T+0.5 T+1
t (s)0 T T+0.5 T+1
t (s)0 T T+0.5 T+1
t (s)
K0
n = 1 , τ = 1/6 n = 2 , τ1 = τ2 = 1/6 n = 2 , τ1 = 1/6 >> τ2
Q-3 Réponses temporellesθV (t) avec une température ambiante nulle et non nulle :
0 8 164 12
1
3
2
4
5
6
t (s)
Volt
U(t)
Q-4 Détermination graphique du gain statique, deτ (constante de temps double du second ordre).ξpour un tel système :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 2
-Correcteur Proportionnel-
Q-5 Expression deBFref etBFambiant
Q-6 Gain statique deBFref :RéponseθV (t) en pointillés du système bouclé en l’absence deθambiant:
0 8 164 12
1
3
2
4
5
6
t (s)
Volt
Yref(t)
Q-7 Erreur permanente/statique en % :
Q-8 Gain statique deBFambiant(s) :Avecθambiant= 0, 5, contribution constante deθambiantà la mesureθV :
Q-9 Tracer la réponse complèteθV (t) en continu sur la figure précédente.
-Correcteur Proportionnel Intégral-
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 2
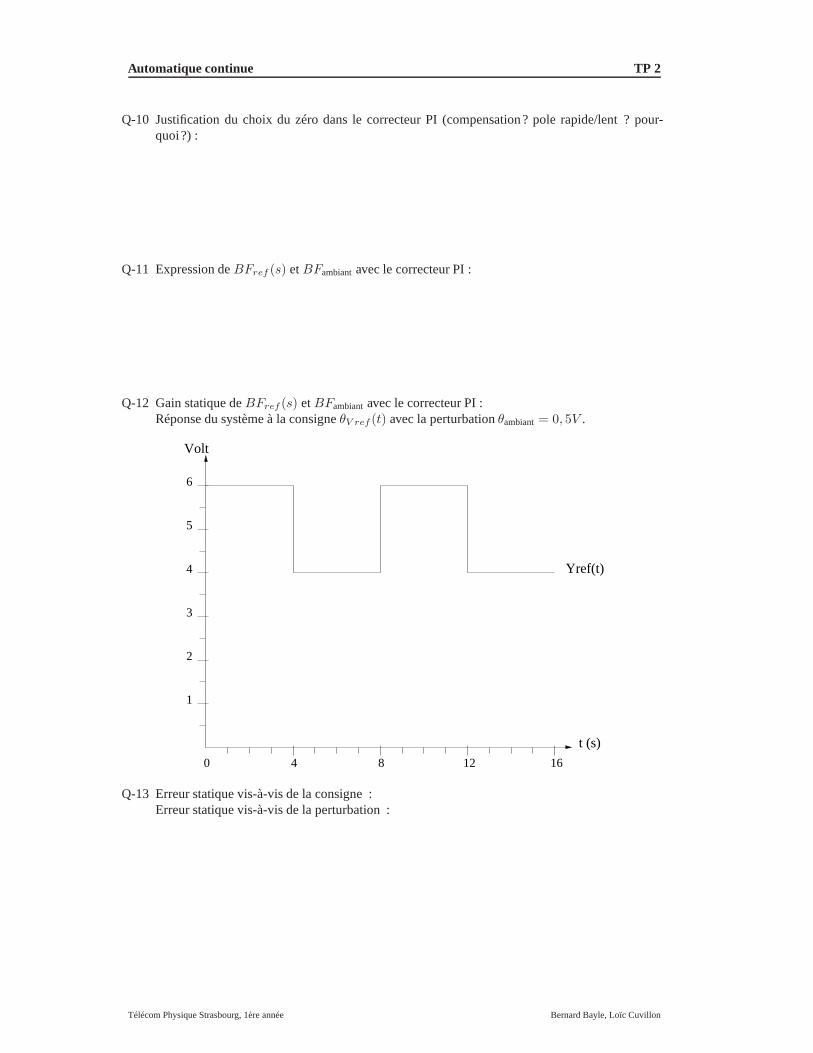
Q-10 Justification du choix du zéro dans le correcteur PI (compensation? pole rapide/lent ? pour-quoi?) :
Q-11 Expression deBFref (s) etBFambiantavec le correcteur PI :
Q-12 Gain statique deBFref (s) etBFambiantavec le correcteur PI :Réponse du système à la consigneθV ref (t) avec la perturbationθambiant= 0, 5V .
0 8 164 12
1
3
2
4
5
6
t (s)
Volt
Yref(t)
Q-13 Erreur statique vis-à-vis de la consigne :Erreur statique vis-à-vis de la perturbation :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 2
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
Feuille de préparation TP 3
Réponse prévue du système
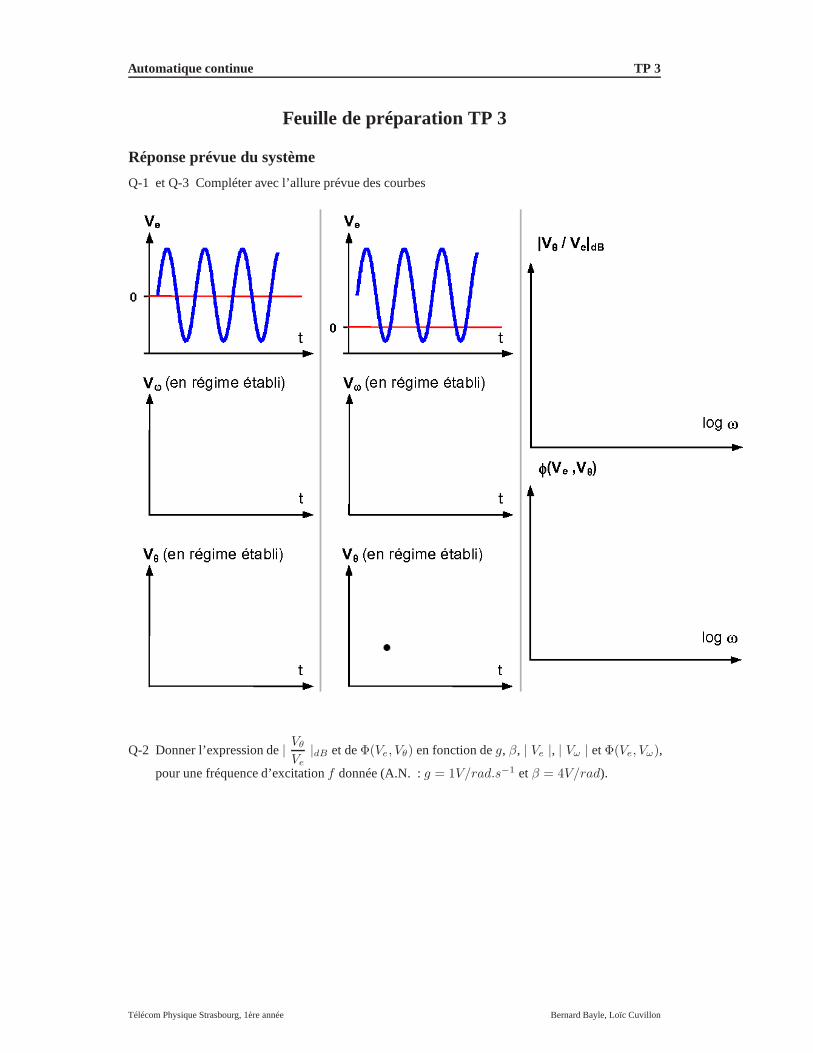
Q-1 et Q-3 Compléter avec l’allure prévue des courbes
Q-2 Donner l’expression de|Vθ
Ve
|dB et deΦ(Ve, Vθ) en fonction deg, β, | Ve |, | Vω | etΦ(Ve, Vω),
pour une fréquence d’excitationf donnée (A.N. :g = 1V/rad.s−1 etβ = 4V/rad).
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon
Automatique continue TP 3
Q-4 et Q-5 Influence des non linéaritésTracer l’allure de la réponse pour une entrée sinusoïdale basse fréquence, de valeur moyennenulle, en tenant compte des frottements secs et des saturations.
Comportement en boucle fermée
Q-7 Expression des transfert :
K0 ω0 ξ
Vθ
Vref
Vθ
Vp
Q-8 Erreurs permanentes d’ordre 0 et 1 vis-à-vis de la consigne :
Erreur statique vis-à-vis de la perturbation :
Q-9 et Q-10 Influences de K :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 3
Q-11 Retour tachymétrique. Expression de la fonction de transfert de la boucle interne :
Q-12 Justification de l’ajustement séparé de la phase et du gain du Bode en boucle ouverte via leréglage deK1 etK2 :
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon

Automatique continue TP 3
Télécom Physique Strasbourg, 1ère année Bernard Bayle, Loïc Cuvillon