Atelier S M A 2 M Vecteurs et plateformes autonomes pour ...
59
04/02/2021 1 surface près du fond Échelle locale Echelle globale Jérôme Blandin: observatoires point fixe Jan Opderbecke : engins sous-marins autonomes Adrien Chauvet, Marc Nokin : drones de surface (USV) Xavier André : profileurs Vecteurs et plateformes autonomes pour la mesure et l’observation Atelier S M A 2 M
Transcript of Atelier S M A 2 M Vecteurs et plateformes autonomes pour ...

04/02/2021 1
surface près du fond
Échelle locale
Echelle globale
Jérôme Blandin: observatoires
point fixe
Jan Opderbecke : engins
sous-marins autonomes
Adrien Chauvet, Marc Nokin :
drones de surface (USV)
Xavier André : profileurs
Vecteurs et plateformes autonomes pour la mesure et l’observationAtelier S M A 2 M

U S V : E TAT D E L ’A R T

04/02/2021 3
- 5 modes de propulsion:• Diesel ou diesel électrique• Electrique• Houlo-moteur• Vélique• Hybride
- Principaux marchés:• Défense• Surveillance portuaire ou côtière• Inspection d’ouvrages d’art• Océanographie au sens large (émergent)
- Charge utile 30-100 kg en moyenne
- Peu d’USV véliques sur le marché.
- Tendance à l’hybridation pour allier autonomie et flexibilité

Diesel
iXBlue DRIX
Kongsberg Sounder
ASVGlobal C-Worker 5
• Vitesse max : 10 – 14 nœuds
• Vitesse de croisière : ≈ 6 nœuds
• Autonomie : ≈ 7 jours ou 1000 MN
• Applications pétrolières et EMR, défence
Capacité opérationnellePuissance disponible (kW)
AutonomieEntretientEmissions polluantes
404/02/2021

04/02/2021 5
Électrique
• Vitesse max : 8 nœuds
• Vitesse de croisière : ≈ 3 nœuds
• Autonomie : ≈ 6-8 heures jusqu’à
quelques jours• Application portuaires ,inspection
d'ouvrage d'art et défence
Transport aisé
Grande manoeuvrabilité
Autonomie
Capacité opérationnelleCharge utile faible
ASVGlobal C-CAT3Subsea Tech CatSurveyor

04/02/2021 6
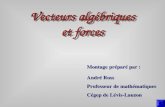
Houlo-moteur
• Vitesse max : 3 nœuds
• Vitesse de croisière : ≈ 1 nœuds
• Autonomie : Virtuellement illimitée
• Application scientifique et défence
Très grande autonomieEmissions polluantes faibles
Très dépendant des conditions de merVitesse faible même avec de bonnes conditions
AutoNaut 5
WaveGlider

04/02/2021 7
Vélique
• Vitesse max : 5-8 nœuds
• Vitesse de croisière : ≈ 3 nœuds
• Autonomie : Virtuellement illimitée• Application scientifique et défence
Très grande autonomieEmissions polluantes faibles
Dépendant des conditions de mer
Saildrone 7 m VAIMOS

04/02/2021 8
Hybridation
Saildrone Surveyor
OCIUSBlueBottle
Sea Proven 70

• Transmission de données depuis des équipements sous-marins (AUV, observatoires, glider)
• Acquisition de données océanographiques y compris dans les zones « blanches » en intégrant des capteurs standards :
• -CTD• -O2• -Turbidité• -...
• Déploiement et récupération de profileur dans des zones « blanches »
• Déploiements depuis les navires océanographiques durant les campagnes scientifiques pour optimiser le temps bateau.
Nos Applications
04/02/2021 9

A T E L I E R S M A 2 M 3 E T 4 M A R S 2 0 2 1
L E S D R O N E S D E S U R F A C E … O U L A T É L É P R É S E N C E R A D I C A L E
Directeur de l’Unité Navires et Systèmes Embarqués au sein de la Direction de la Flotte OcéanographiqueChef du projet de construction du Polar Pod

11
Ø Intégration des USV ’S au sein de la Flotte – pourquoi?
Ø Quelques exemples d’application
Ø Les collaborations en cours
Les USV’s sont arrivés à maturité et doivent s’inscrire dans le paysage de la Flotte
Elle pourrait se doter une flottille d’USV’s, pouvant opérer en meutes, afin de densifier ou régulariserl’échantillonnage de mesure. Cette transformation impacterait en profondeur l’acquisition de la donnée et sa densité,et structurellement la gestion de la flotte

12
Et :
Ø Réduction de l’impact environnemental :
Un des objectifs affichés pour le renouvellement de la Flotte avec une réduction min de 30% de laconsommation
Emission CO2 d’un navire de 50-100m par jour = 100 drones de type DRIX/jour
Ø Optimisation du coût des campagnes
1 journée du Pourquoi pas? = au minimum 1 journée avec 15-20 dronesCoût de maintenance d’un navire de 50-100m = 100 drones de type DRIX
Le drone USV :
Ø un outil imparfait mais qui remplit une mission que l’on ferait pas autrementØ un outil de remplacement du navire pour certaines missionsØ un outil qui vient en complément du navire

13
La FOF cherche à :
Ø Connaître les potentialités techniques des USV’s (charges utiles, stabilité, vitesse, consommation, fiabilité….)
Ø Acquérir des compétences sur les briques technologiques
La FOF développe trois collaborations/échanges :
Ø IXBLUE/H2X sur le DRIX 40
Ø SAILDRONE sur le SURVEYOR
Ø SHOM sur le DRIX 7m

Tout commandant se doit d’éviter celaPolar Pod : une réponse adaptée mais une plateforme très spécifique et peu souple d’usage
Exemple des études Echange Océan-Atmosphère en océan Austral – Utilisation d’un drone en l’absence d’autre solution.
SAIL DRONE : Le compromis – Il est allé sur zone mais les mesures sont probablement imparfaites

SAIL DRONE le tour de l’Antarctique dans l’Océan Austral
04/02/2021 15
q Départ de Nouvelle Zélande le 19/01/2019, q Retour le 3 aout 2019q 196 jours de navigationq 11879 miles parcourus à 2,53 nœuds de moyenneq Navigation en partie au-delà de 60°Sq Vent 70 knots, 15 m de vagues
q 10 ans de développementq Tentative en 2015 et en 2017 échouées
SAIL DRONE : Le compromis – Il est allé sur zone mais les mesures sont probablement imparfaites
q 7m de long, 750 kgq Quille de 2,5m, mât de 5mq Autonomie limitée par le fouling soit environ 12m
q Superviseur à terre par lien satelliteq Navigation autonome par way pointsq Navigation en sécurité : AIS, réflecteur radar, projecteurs, caméras
embarquées

Collaboration PMEL (NOAA) / Saildrone pour le développement des drones depuis 2014
Recherche sur les échanges océan-atmosphère
Des missions de 5, 6 et 8 mois en autonomie en meute (2 à 4 Saildrones) dans le pacifique équatorial en 2019
04/02/2021 16
Comparaison des mesures entre le Saildrone et le NO
Objectif : Remplacement du navire par un drone de surface

Mission conjointe avec le navireObjectifs :
Enrichir les données acquises par le navire par un engin autonome et explorer les zones interdites au navire
5 Saildrones sur la côte Ouest des USA combiné au RV Reuben Lasker pour l’évaluation des stocks de poisson
5000 milles parcourus au total
04/02/2021 17

04/02/2021 18
Coopération de la FOF avec les industriels/académiques
Ø Qualification du SURVEYOR (22m) de SAILDRONE
Collaboration SAIDRONE – Université du NewHampshire – MBARI – IFREMER pour laqualification du sondeur multifaisceau et lacomparaison des données avec le NO Thalassa
Malheureusement enstandby pour raisons sanitaires

04/02/2021 19
Développement du DRIX 40
Projet SEMNA : Développement du DRIX 40
Collaboration sur les aspects poste de contrôle, autonomie marine collaborativeet qualification
Ø Labellisation du Pôle Mer Méditerranée endécembre 2020
Ø Instruction du CORIMER en cours
Ø Partenaires : IXBLUE, FORSEA, IFREMER,ENSM et DONECLE
Objectifs : Démonstration technico/scientifico/opérationnelle

04/02/2021 20
Missions d’évaluation de deux DRIX par le SHOM en septembre 2020
Evaluation avec 1 et 2 DRIX 7m
Ø ManutentionØ DisponibilitéØ NavigationØ Qualité des données et rendementØ AutonomieØ Dimensionnement des équipes

04/02/2021 21
Equipements du SURVEYOR

04/02/2021 22
Merci….

PROFILEURSOCEANOGRAPHI
QUESDE L’ IFREMER
P r é s e n t é p a r X a v i e r A N D R É
4 f é v r i e r 2 0 2 1J o u r n é e s S M A 2 M

24
Plan
Cadre &fonctionnementGamme
© G
ena
vir/
Ma
rtin
MA
UPA
S
Perspectives

25
Objectifs scientifiques©
IPC
C
Circulation océanique
Echanges mer / atmosphère
© O
cean
clim
ate.
org
Impact de l’océan sur le climat
© O
cean
clim
ate.
org
Etalonnage satellites océano
© C
NES

26
Fonctionnement d’un profileur
© TGIR Euro-ARGO

27
© L
OPS
/ K
évin
BA
LEM
Le réseau ARGO
30 pays
Créé en 2000 Carrés de 3° lat./long.
> 3000 profileurs

28
Données libres et gratuites
> 3600 publications depuis l’an 2000
1 publication scientifique par jour depuis 2014
Impact scientifique

29
Plan
Cadre &fonctionnementGamme
© G
ena
vir/
Ma
rtin
MA
UPA
S
Perspectives

30
Articulée autour de 4 produits principaux
Contexte très industrialisé, TRL élevé
Gamme des profileurs

31
Gamme des profileursProvor
© Ifremer
Forte capacité d’emport de capteurs externes
> 1000* Provor déployés
* Sources : JCOMMOPS, 21/01/2021

32
Arvor
© Ifremer/Olivier DUGORNAY
Profileur le + déployé au monde en 2018 & 2019
> 1750* Arvor déployés
* Sources : JCOMMOPS, 21/01/2021
Gamme des profileurs

> 110* Deep-Arvor déployés
33
Deep-Arvor
© Ifremer/Patrick ROUSSEAUX * Sources : JCOMMOPS, 21/01/2021
Gamme des profileurs

34
Provor-BGCConçu par NKE instrumentation sur base ProvorBGC : bio-géo-chimique
© Ifremer
Base : Provor
> 210* Provor-BGC déployés
* Sources : JCOMMOPS, 21/01/2021
Gamme des profileurs

35
Plan
Cadre &fonctionnementGamme
© G
ena
vir/
Ma
rtin
MA
UPA
S
Perspectives

36
2000 2010 2020 2030Core-Argo Core-Argo
+ expérimentations deep & BGCCore-ArgoDeep-ArgoBGC-Argo
Projets en cours :o Deep-6000o Capteurs BGC + diversification de la plateformeo Déploiement autonome/récupération
Perspectives

37
MERCI POUR VOTRE ATTENTION !
QUESTIONS ?
Contact : [email protected]
© If
rem
er /
Oliv
ier D
ugor
nay

O B S E R VAT O I R E S E N P O I N T F I X E
AT E L I E R S M A 2 M – 3 & 4 F É V R I E R 2 0 2 1
Jérôme BlandinIfremer REM/RDT/SIIM

Pourquoi observer en point fixe ?Permanence de l’observation & longues séries temporelles
appliquées auxà Besoins de recherche scientifique développés hier,
mais aussià Etudes et surveillance du milieu en lien avec l’industrie:
• Pétrole et gaz en mer• Exploitation minière profonde• Energies marines renouvelables• Pêche et aquaculture
à Réseaux d’alerte (aléas géologiques)
39Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021

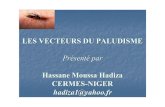
Sensor/Instrument
Instrument provider
Instrument operator
Platform operator
Platform provider
Marine platform /Marine infrastructure /
Site Facility
IT Infrastructure
Quality controller
IT infrastr. provider
End user
Reference
Pre- and post-calibration,
Implementation procedures
Platform design
Operational procedures QC procedures
Data/metadata format
Chaîne de production de données d’observation océaniques en point fixe

Comment observer en point fixe ?
41Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Sur le fond de merEx. MARHA
Profondeur 1000 mPremière installation 2021 Charge embarquée: CTD, turbidimètre, DO, ADCP, Caméra HD, piège à particulesPériode maintenance: 12 mois (N/O Thalassa, HROV Ariane)
De manière autonome en énergie, sans lien de communicationDans la colonne d’eauEx. Mouillage DYFAMED
…/…Image Ifremer

Mouillage Dyfamed
04/02/2021 42
Profondeur: 2300 mExtension verticale utile: 1820 mSéries de données depuis 1998CTD, DO, courantomètres, pièges à particulesPériode de maintenance: 12 mois (N/O Thétys II)

Comment observer en point fixe ?
43Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Sur le fond de merEx. Seamon EMSO Açores
De manière autonome en énergie, avec lien de communication <-> terreDans la colonne d’eauEx. EMSO Hellenic Arc
…/…
Profondeur 1700 mSéries de données depuis 20101 station géophysique (sismomètre, Digiquartz)1 station écologie benthique (Caméra HD, DO, turbidité, Fe)Période maintenance: 12 mois (N/O Ppas? ou Atalante /
ROV Victor ou HOV Nautile)Opéré par Ifremer – CNRS/IPGP

Hellenic Arc
04/02/2021 44
Profondeur: 1670 mExtension verticale utile: 1000 mSéries de données depuis 2007CTD, DO, courantomètres, turbidité, Chl-aPériode de maintenance: 6 mois (R/V Aegaeo)Opéré par HCMR

Comment observer en point fixe ?
45Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Sur le fond de mer
Grâce à un câble en fond mer
Ex. Réseau DONET[…]

04/02/2021 46
Réseau d’alerte séismes/tsunamisDONET1
En opération depuis 2011Câble de 320 km22 points d’observationProf. max 4300 m2 forages instrumentés
DONET2En opération depuis 2016Câble de 500 km29 points d’observation
CapteursAccéléromètres (mouvements forts)Sismomètres large bandeJauges de pression absolues et différentiellesThermomètres

Comment observer en point fixe ?
47Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Dans la colonne d’eau
Ex. Mouillage Albatross
Grâce à un câble en fond mer
Instrumented Interface Module (MII)
Ligne Albatross
Co
mm
. in
du
ctiv
eC
om
m. i
nd
uct
ive
Profondeur: 2500 m
Extension verticale utile: 1750 m
Séries de données depuis 2016
CTD, DO, courantomètres
Période de maintenance: 12 mois (N/O Thétys II)
Opéré par CNRS/DT-INSU

Evolutions de l’observation en point fixe
48Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Besoins généraux (à consolider à la faveur du présent atelier)
Étendre couverture spatialegamme des paramètres observésinteropérabilité entre infrastructures d’observation
(capteurs, plateforme, accès aux données, maintenance…)Diminuer coûts annuels d’opérations
empreinte environnementaleAugmenter capacité de décision in situ
capacités de communication océan - terre

Evolutions de l’observation en point fixe
49Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Technologies clés, en cours d’évolution (hors capteurs)
Communication et transfert de puissance sans filCommunication et transfert de puissance le long des câbles de mouillageGénération et stockage d’énergie sous la merDocking de véhicules sur installations permanentesCapacité de traitement de données embarquéeMatériaux

Coopération avec engins mobiles
50
USVs à Communication avec la terre, extension spatiale
AUVs à Extension spatiale, communication étendue
Gliders à Extension spatiale, calage métrologique
Engins à chenilles (crawlers benthiques) à Extension spatiale
Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Ré
sid
en
ts Copyright Patrick Rousseaux 2020
Courtesy of Teledyne Webb Research
Image courtesy of Transmark Subsea
Bathybot - Copyright Christian Tamburini
ROVs à maintenance moins chère (?) à faible empreinte carbone (?) …/…

Vers une maintenance sans navire ??
51Image courtesy Oceaneering
Image courtesy Oceaneering
Atelier SMA2M – Etat de l’art des plateformes et systèmes de mesure autonomes existants – Observatoires en point fixe – Blandin, 4 février 2021
Energy Data

Merci de votre attention
52

Les Sous-Marins Autonomes AUV en 10 minutes !
A. qu’est-ce qu’un véhicule autonome
B. fonctionnalités, capteurs, équipements
C. concepts d’engin
D. concepts de déploiements
04/02/2021 53Jan OpderbeckeSM2AM - 04/02/21

Qu’est-ce que c’est qu’un véhicule sous-marin autonome ?
1. Il est piloté par une machine embarquée (pas de humain)- fonctionnement d’automate dans la 1ière génération, comportements pour la sécurité et pour le suivi de fond- évolution vers des missions avec une véritable capacité décisionnelle
2. Il n’a pas de lien physique avec la surface & il possède un stockage d’énergie embarqué- en option positionnement et communications- puissance propulsive & « hôtel », puissance pour trajets surface-fond, puissance pour charge utile
3. Mais … quid de la supervision, de la communication et du positionnement par un navire ?- navigation et géo-référencement des données - retour d’information durant la plongée, moyens d’interactions via modem acoustique
04/02/2021 54Le glider est-il un AUV ?
L’AUV est-il intelligent ?

Quelles fonctions et quels équipements
55
Topographie et nature des fond
Sonar latéral
Sondeur multifaisceaux
Magnétométrie
Caméra optique
Sonar à antenne synthétique
Système de photogrammétrie
LIDAR
Analyse sédiments & sous-sol
Réflectivité fond
Sondeur de sédiment
Réflectivité colonne d’eau
Capteur redox, méthane
Échantillonnage sédiment
Mesures in-situe, spectrométrie…
Mesures colonne d’eau
ADCP & turbidité
paramètres physiques
paramètres biochimiques
Sondeurs de pêche
Acoustique passive
Gravimétrie
Prélèvement d’eau
BioluminescenceTRL /
maturité1000W 1W


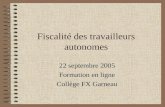
Les concepts de déploiement: une clé pour l’usage des AUV
57
AUV individuel
Sur navire
(AUV de survey)
Depuis la terre
(AUVs portables faible fond)
AUVs multiples
(MBARI, Ocean infinity)
Sous la glace…
(grands et petits)
TRL /
maturitéMeute coopérative
Flottille hétérogène
(projet Morph)
Flottille homogène
(projet Mélodie)
Essaim
(projet SpiceRack)
Déploiement résident
Capacité mise en veille
(long range AUV, SpiceRack, Bathybot)
Structure « docking »
(Oceaneering, Naval Group, WHOI, Ifremer)

La maturité en 4 mots :
Bill Kirkwood Copyright MBARI 2019

04/02/2021 59
Merci !