
ARDJOUN
147
République Algérienne Démocratique et Populaire Ministère de l'Enseignement Supérieur et de la Recherche Scientifique UNIVERSITE DJILLALI LIABES DE SIDI-BEL-ABBES Faculté des Sciences de l'Ingénieur Département d'Electrotechnique Mémoire présenté par : ARDJOUN Sid Ahmed El Mahdi Pour l'obtention du diplôme de : MAGISTER en Electrotechnique Option : Convertisseurs électromécanique Intitulé du mémoire : Commande en vitesse par mode glissant d’une Machine Asynchrone à Double Alimentation Présenté devant le jury composé de : Dr. MASSOUM Ahmed MC A (U.D.L. Sidi Bel-Abbès) Président Dr. ABID Mohamed MC A (U.D.L. Sidi Bel-Abbès) Rapporteur Dr. DEHIBA Boubekeur MC A (U.D.L. Sidi Bel-Abbès) Examinateur Dr. BOUNOUA Houria MC A (U.D.L. Sidi Bel-Abbès) Examinateur Dr. NACERI Abedelatif MC A (U.D.L. Sidi Bel-Abbès) Examinateur Soutenu le : / / 2010 Laboratoire de Recherche (IRECOM)
-
Upload
anass-edebbab -
Category
Documents
-
view
39 -
download
7
Transcript of ARDJOUN
République Algérienne Démocratique et Populaire
Ministère de l'Enseignement Supérieur et de l a Recherche Scientifique
UNIVERSITE DJILLALI LIABES DE SIDI-BEL-ABBE S
Faculté des Sciences de l'Ingénieur
Département d'Electrotechnique
Mémoire présenté par :
ARDJOUN Sid Ahmed El Mahdi
Pour l'obtention du diplôme de :
MAGISTER en Electrotechnique
Option :
Convertisseurs électromécanique
Intitulé du mémoire :
Commande en vitesse par mode glissant d’une Machine Asynchrone à Double
Alimentation
Présenté devant le jury composé de : Dr. MASSOUM Ahmed MC A (U.D.L. Sidi Bel-Abbès) Président Dr. ABID Mohamed MC A (U.D.L. Sidi Bel-Abbès) Rapporteur Dr. DEHIBA Boubekeur MC A (U.D.L. Sidi Bel-Abbès) Examinateur Dr. BOUNOUA Houria MC A (U.D.L. Sidi Bel-Abbès) Examinateur Dr. NACERI Abedelatif MC A (U.D.L. Sidi Bel-Abbès) Examinateur
Soutenu le : / / 2010
L a b o r a t o i r e d e R e c h e r c h e ( I R E C O M )
, résumé, abstract
UDL- SBA-2010 i
را ح إا ا ا اآ)'& % $ا ) ك( آ ه )*+ا$ء اآ0 و ا7ك +*(0 '3ا8 37ج 45 (3ن آ1 0 ,ف, -, ا
ا ض -<3 ا)'& ا7$ود ' ا, ل :و ها ' 7ل ت ا @$7ل 'A7 ا +ات . آB و <' DE ر<Fم واH3E Iم 'را 3ك ا
7آ Jا . اK&E L7 M ( 1N7 .ا
آ ت
, آ)'& % $ا -, ا+*( آ ل آB, ا ا , A7ل ' @$7 .37ج 3 ا)'& , ا
Résumé
Cette étude présente des stratégies de la commande vectorielle découplée par retour d’état (régulateur classique PI et régulateur par mode glissant) appliquées à la commande en vitesse d'une Machine Asynchrone à Double Alimentation MADA (moteur), dont les enroulements statoriques et rotoriques sont reliés à des onduleurs de tensions à Modulation de Largeur d'Impulsion (MLI) indépendants. Des tests de robustesse de la commande vis-à-vis des variations paramétriques de la machine seront effectués, des simulations seront présentées.
Mots clés
Machine Asynchrone à Double Alimentation (MADA), commande vectorielle, découplage par retour d’état, régulateur classique PI, régulateur par mode glissant, onduleur de tension.
Abstract
This study deals with field oriented control of the state space input-output decoupling strategies (classical regulator PI and sliding mode regulator) applied to the rotation speed feedback of a doubly fed induction machine DFIM (motors), whose stator and rotor windings are connected to two Pulse Width Modulation (PWM) voltage source inverters. The test of robustness of the controllers against machine parameters uncertainty will be tackled, and the simulations will be presented. Key words
Doubly Fed Induction Machine (DFIM), field oriented control, state space input-output decoupling, classical regulator PI, sliding mode regulator, voltage source inverters.
Remerciement
UDL SBA 2010 ii
Remerciement
Ce mémoire a été préparé au sein du laboratoire IRECOM du
département d’électrotechnique de l’Université de Djillali Liabes de Sidi Bel
Abbes.
Je tiens à remercier particulièrement Dr. ABID Mohamed, Maître de
conférences au département d’électrotechnique de l’UDL SBA, pour avoir
accepté d’être le rapporteur de ce mémoire et pour son aide précieuse et ses
conseils judicieux.
Je tiens à remercier aussi très profondément :
Dr. MASSOUM Ahmed, Maître de conférences au département
d’électrotechnique de l’UDL SBA, pour sa participation au jury de ce
présent mémoire en tant que président.
Dr. DEHIBA Boubekeur, Maître de conférences au département
d’électrotechnique de l’UDL SBA, Dr. BOUNOUA Houria, Maître de
conférences au département d’électrotechnique de l’UDL SBA,
et Dr. NACERI Abedelatif, Maître de conférences au département
d’électrotechnique de l’UDL SBA, pour avoir accepté de juger ce travail, en
tant que membres de Jury.
Toutes les personnes ayant contribué de près ou de loin, directement ou
indirectement, continue ou ponctuelle, à l’achèvement de ce travail.
Dédicace
UDL-SBA-2010 iii
Dédicace
A mon cher père et ma chère mère
pour l’éducation et le grand amour
dont ils m’ont entouré
Et
pour leur patience et leurs sacrifices.
A mes chères sœurs.
A tous mes proches.
A tous mes amis.
A tous ce que j’aime.
Ce mémoire leur est dédié.
ARDJOUN Sid Ahmed El Mahdi
Notations et symboles
UDL-SBA-2010 iv
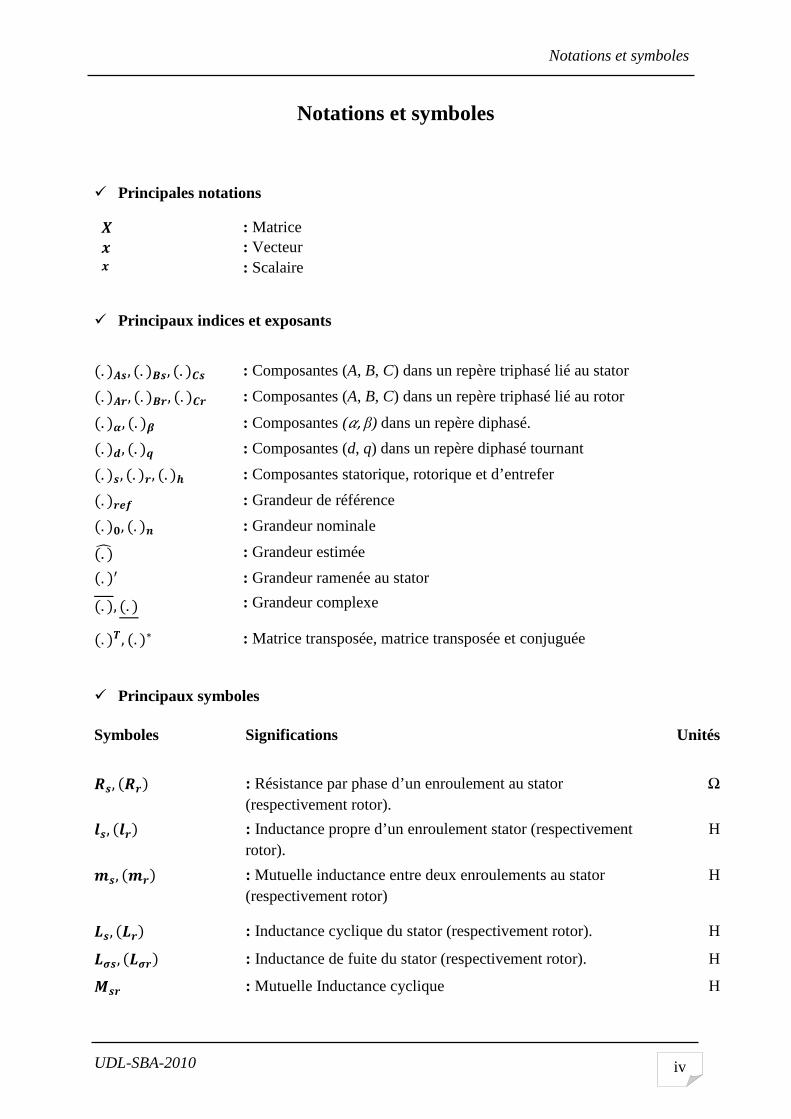
Notations et symboles
Principales notations
: Matrice : Vecteur : Scalaire
Principaux indices et exposants
. , . , . : Composantes (A, B, C) dans un repère triphasé lié au stator . , . , . : Composantes (A, B, C) dans un repère triphasé lié au rotor . , . : Composantes (, β) dans un repère diphasé. . , . : Composantes (d, q) dans un repère diphasé tournant . , . , . : Composantes statorique, rotorique et d’entrefer . : Grandeur de référence . , . : Grandeur nominale . : Grandeur estimée . : Grandeur ramenée au stator . , . : Grandeur complexe
. , . : Matrice transposée, matrice transposée et conjuguée
Principaux symboles
Symboles Significations Unités
, : Résistance par phase d’un enroulement au stator (respectivement rotor).
Ω
, : Inductance propre d’un enroulement stator (respectivement rotor).
H
, : Mutuelle inductance entre deux enroulements au stator (respectivement rotor)
H
, : Inductance cyclique du stator (respectivement rotor). H , : Inductance de fuite du stator (respectivement rotor). H : Mutuelle Inductance cyclique H
Notations et symboles
UDL-SBA-2010 v
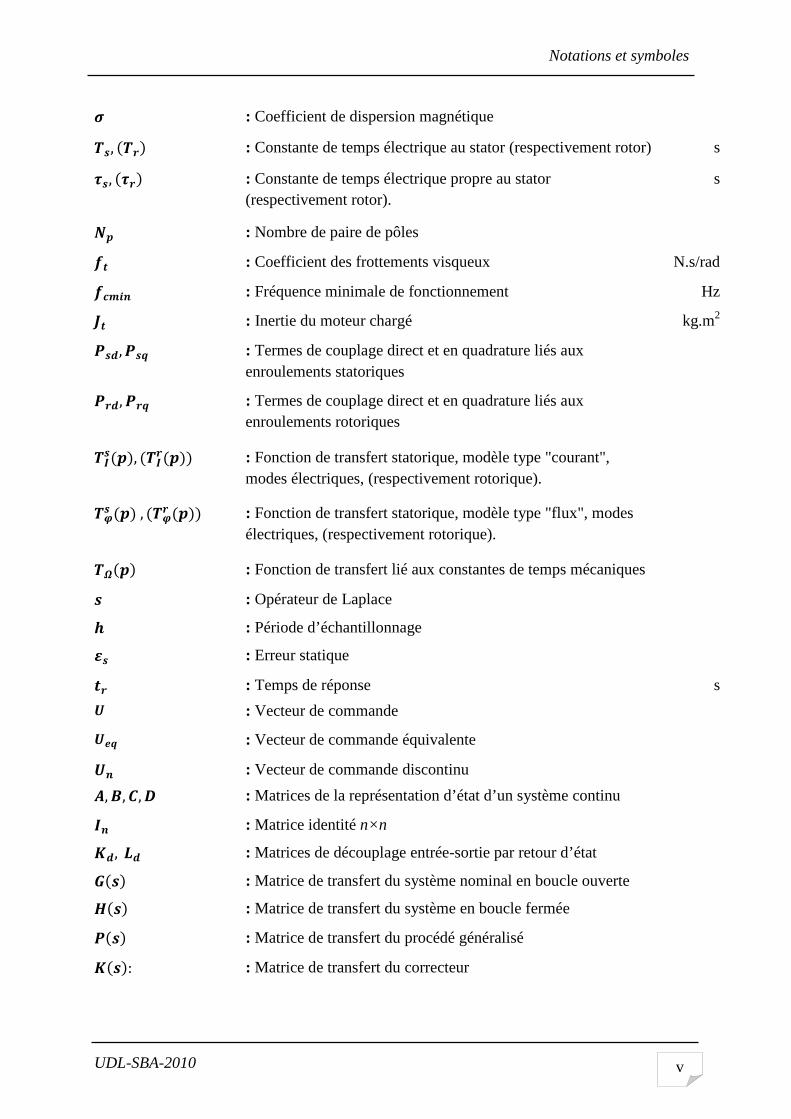
: Coefficient de dispersion magnétique , : Constante de temps électrique au stator (respectivement rotor) s !, ! : Constante de temps électrique propre au stator (respectivement rotor).
s
"# : Nombre de paire de pôles $ : Coefficient des frottements visqueux N.s/rad %& : Fréquence minimale de fonctionnement Hz '$ : Inertie du moteur chargé kg.m2 (, ( : Termes de couplage direct et en quadrature liés aux enroulements statoriques
(, ( : Termes de couplage direct et en quadrature liés aux enroulements rotoriques
)#, )# : Fonction de transfert statorique, modèle type "courant", modes électriques, (respectivement rotorique).
* # , * # : Fonction de transfert statorique, modèle type "flux", modes électriques, (respectivement rotorique).
+# : Fonction de transfert lié aux constantes de temps mécaniques : Opérateur de Laplace : Période d’échantillonnage , : Erreur statique $ : Temps de réponse s - : Vecteur de commande - : Vecteur de commande équivalente - : Vecteur de commande discontinu , , , . : Matrices de la représentation d’état d’un système continu ) : Matrice identité n×n /, : Matrices de découplage entrée-sortie par retour d’état 0 : Matrice de transfert du système nominal en boucle ouverte 1 : Matrice de transfert du système en boucle fermée ( : Matrice de transfert du procédé généralisé /: : Matrice de transfert du correcteur
Notations et symboles
UDL-SBA-2010 vi
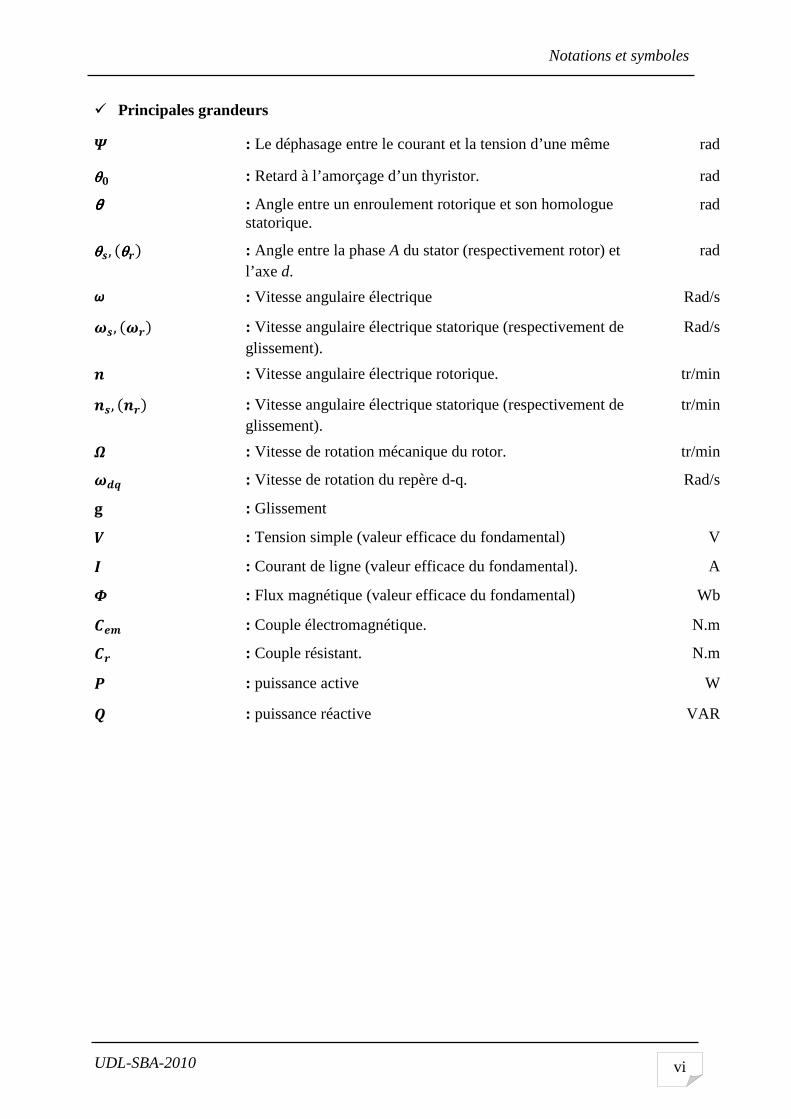
Principales grandeurs
3 : Le déphasage entre le courant et la tension d’une même rad
θθθθ : Retard à l’amorçage d’un thyristor. rad
θθθθ : Angle entre un enroulement rotorique et son homologue statorique.
rad
θθθθ, θθθθ : Angle entre la phase A du stator (respectivement rotor) et l’axe d.
rad
ω : Vitesse angulaire électrique Rad/s 4, 4 : Vitesse angulaire électrique statorique (respectivement de glissement).
Rad/s
: Vitesse angulaire électrique rotorique. tr/min
, : Vitesse angulaire électrique statorique (respectivement de glissement).
tr/min
+ : Vitesse de rotation mécanique du rotor. tr/min
4 : Vitesse de rotation du repère d-q. Rad/s
5 : Glissement
6 : Tension simple (valeur efficace du fondamental) V
) : Courant de ligne (valeur efficace du fondamental). A
7 : Flux magnétique (valeur efficace du fondamental) Wb
: Couple électromagnétique. N.m
: Couple résistant. N.m
( : puissance active W
8 : puissance réactive VAR
Notations et symboles
UDL-SBA-2010 vii
Sigles :
MADA : Machine Asynchrone à Double Alimentation.
DFIM : Doubly Fed Induction Machine.
MLI : Modulation à Largeur d’Impulsions.
PI : Action Proportionnelle et Intégrale.
IGBT : Insulated Gate Bipolar Transistor.
GTO : Gate Turn Off.
FTBO : Fonction de Transfert en Boucle Ouverte.
FTBF : Fonction de Transfert en Boucle Fermée.
Tables De Matières
UDL-SBA-2010 vii
Tables De Matières
Résumé…………………………………………………………………………………… i Remerciement…………………………………………………………………………….. Dédicace…………………………………………………………………………………..
ii iii
Notations et symboles…….……………………………………………………………..... iv Tables De Matières………………………………………………………………….......... vii Liste des figures………………………………………………………………….……….. xiii Liste des tableaux………………………………………………………………………… xvii
Introduction générale……………………………………………………………………. 1
Chapitre I
L’état de l'art de la machine asynchrone à double alimentation
I.1. Introduction……………………………………………………………………….......... 5
I.2. Description de la machine asynchrone à double alimentation…………………………. 5
I.3. Classification………………………………………………………………………….... 6
I.3.1. Machine à double alimentation simple………………………………………………... 7
I.3.2. Machine à double alimentation en cascade…………………………………................. 7
I.3.3. Machine à double alimentation cascade à un repère…………………………………. 8
I.3.4. Machine à double alimentation sans collecteur………………………………………. 8
I.3.5. Machine à double alimentation sans balai………………………………………. .…... 9
I.4. Principe de fonctionnement de la MADA……………………………………………… 10
I.5. Notions hypo et hyper-synchrone de la MADA……..………………………………..... 11
I.6. Fonctionnement à quatre quadrants de la MADA……………………………………… 13
I.6.1. Fonctionnement en mode moteur hypo synchrone……………………………………. 14
I.6.2. Fonctionnement en mode moteur hyper synchrone…………………………... ……... 15
I.6.3. Fonctionnement en mode générateur hypo synchrone……………………….. ……… 15
I.6.4. Fonctionnement en mode générateur hyper synchrone…………………………. ……. 16
Tables De Matières
UDL-SBA-2010 viii
I.7 Variation de vitesse de la MADA………………………………………………………. 16
I.7.1. Cascade hyposynchrone……………………………………………………………….. 18
I.7.1.1. Diagramme simplifié de la machine asynchrone d’induction ………………………. 19
I.7.1.2. Imposition de f.é.m. polyphasée de pulsation gωs au secondaire d’une MADA….. 20
I.7.1.3. Vitesse et variation de vitesse de la MADA ………………………………………. 22
I.7.1.4. Variation de vitesse et de puissance réactive absorbée au primaire par action sur le secondaire…………………………………………………………………………………….
23
I.8. Domaines d’application de la MADA..………………………………………………… 27
I.9. Avantages et inconvénients de la MADA……………………………………………..... 28
I.9.1 Avantages de la MADA………………………………………………………............... 28
I.9.2 Inconvénients de la MADA……………………………………………………………. 29
I.10. Conclusion……………………………………………………………………………... 30
Chapitre II
Modélisation de la MADA et de son alimentation
II.1. Introduction…………………………………………………………………………… 31
II.2. Mise en équation de la MADA………………………………………………………. 32
II.2.1. Hypothèses simplificatrices et Conventions………………………………………… 32
II.2.2 Mise en équations…………………………………………………………………. ... 32
II.3. Modélisation de la MADA……………………………………………………………..
II.3.1. Modélisation type "courant"…………………………………………………. ………
34
34
II.3.1.1 Modes électriques……………………………………………………... ……………
34
a). Expression des fonctions de transferts des modes électriques………... ………………… 34
b). Schéma-bloc des modes électriques…………………………………... ………………… 38
II.3.1.2 Modes mécaniques…………………………………………………….. …………… 38
a). Expression de la fonction de transfert du mode mécanique………….. …………………. 38
Tables De Matières
UDL-SBA-2010 ix
b). Schéma-bloc du mode mécanique……………………………………. …………………. 39
II.3.2. Modélisation type "flux"……………………………………………………... ……… 39
II.3.2.1 Modes liés aux flux…………………………………………………………………. 39
a). Expression des fonctions de transferts des modes liés aux flux……… ………………… 39
b). Modélisation schématique des modes électriques……………………. ………………… 42
II.3.2.2 Modes mécaniques…………………………………………………….. …………… 42
a). Expression de la fonction de transfert du mode mécanique……………………………... 42
b). Schéma-bloc du mode mécanique……………………………………………………….. 42
II.3.3. Comparaison sur les deux types de modélisations présentées……………………….. 43
II.4. Simulation de la MADA……………………………………………………………….. 44
II.5. Modélisation du système d’alimentation……………………………………………….. 48
II.5.1. La structure de la chine d’alimentation choisie...……………………………………. 48
II.5.2. Modélisation du redresseur…………………………………………………………... 49
II.5.3. Modélisation du filtre……………………………………………………….... …...… 50
II.5.4. Modélisation de l’onduleur de tension………………………………………………. 51
II.5.5. Commande par modulation de largeur d’impulsion (MLI)………………………….. 54
II.6. Simulation de l'association MADA avec onduleur à MLI……………………….......... 56
II.7. Conclusion……………………………………………………………………………... 57
Chapitre III
Commande vectorielle de la MADA avec Découplage par Retour d’état
III.1.Introduction ……………………………………………………………………………. 58
III.2. But et principe de la commande vectorielle…………………………………………... 59
III.3 Variantes de la commande vectorielle…………………………………………………. 60
III.4. Les types de la commande vectorielle……………………………………………….... 60
Tables De Matières
UDL-SBA-2010 x
III.3. Application de la commande vectorielle à la MADA…………………………...……. 61
III.3.1. choix de repère de référence………………………………………………………… 62
III.3.2. Contrôle des courants avec découplage par retour d’état…………………………… 63
III.3.2.1. Modélisation sous forme d’état de la MADA……………………......................... 63
III.3.2.2. Application à la MADA…………………………………………........................... 64
III.3.2.3. Régulation des courants…………………………………………………………… 65
III.3.2.4. Régulation du flux………………………………………………………………… 66
a). Situation et orientation du flux……………………………………….. ………………… 66
b). Synthèse du régulateur du flux………………………………………………………….. 68
III.3.2.5. Régulation de la vitesse…………………………………………………………… 68
III.4. Résultats de simulation………………………………………………………………... 70
III.5. Etude de l’effet des incertitudes paramétriques………………………………………. 73
III.5.1. Effet de variation des paramètres électriques………………………………………. 74
III.5.2. Effet de variation des paramètres mécaniques……………………………………… 77
III.6. Conclusion …………………………………………………………………………….. 79
Chapitre IV
Commande à régime glissant appliquée à la MADA
IV.1. Introduction…………………………………………………………………………… 80
IV.2. Généralités sur la théorie du contrôle par mode de glissement……………………….. 80
IV.2.1. Présentation de la Structure par commutation au niveau de l'organe commande, avec ajout de la commande équivalente……………………………………………………...
81
IV.3. Principe de la commande à régime glissant…………………………………………... 82
IV.3.1. Définition des systèmes à structure variable………………………………............... 82
IV.3.2. Formulation des expressions générales de la commande par mode de glissement… 84
IV.3.3. Conception de la commande par mode glissant……………………………............... 88
Tables De Matières
UDL-SBA-2010 xi
IV.3.3.1. Choix de la surface de glissement………………………………………………… 88
IV.3.3.2. Conditions de convergence et d’existence……………………….......................... 89
IV.3.3.3. Synthèse des lois de commande du mode glissant………………………………… 90
IV.4. Application de la commande à régime glissant à la MADA…………………………... 95
IV.5. Résultats de simulation……………………………………………………………….. 96
IV.6. Etude de l’effet des incertitudes paramétriques………………………………………. 99
IV.6.1. Effet de variation des paramètres électriques……………………………………….. 99
IV.6.2. Simulation de l’effet de variation des paramètres mécaniques……………............... 101
IV.7. Conclusion…………………………………………………………………………….. 102
Conclusion générale………………………………………………………………………... 103
Annexe A
La transformation de Park et choix du référentiel
A.1. La transformation de Park……………………………………………………………... 105
A.2. Choix du référentiel…………………………………………………………………… 107
Annexe B
Paramètres de simulation, cycle de fonctionnement et cahier de charges utilisées pour
la MADA
B.1 Paramètres de simulation……………………………………………………………….. 108
B.2. Cycle de fonctionnement et cahier de charges…………………………………………. 108
Tables De Matières
UDL-SBA-2010 xii
Annexe C
La théorie de découplage par retour d’état
C.1. Introduction…………………………………………………………………………….. 112
C.2. Principe de la méthode…………………………………………………………………. 112
Références bibliographiques
Références bibliographiques………………………………………………………………. 114
Liste des figures
UDL-SBA-2010 xiii
Liste des figures
Figure I.1 :
Chapitre I
Stator.
6
Figure I.2 : Rotor bobinée. 6
Figure I.3 : Schéma d’alimentation typique de la MADA. 6
Figure I.4 : Schéma de principe de la machine à double alimentation simple. 7
Figure I.5 : Schéma de principe de la machine à double alimentation en cascade. 7
Figure I.6 : Schéma de principe de la machine à double alimentation en cascade à un repère.
8
Figure I.7 : Schéma de principe de la machine à double alimentation sans collecteur. 8
Figure I.8 : Schéma de principe de la machine à double alimentation sans balai 9
Figure I.9 : Moteur à rotor bobiné à double alimentation connecté à deux sources triphasées.
11
Figure I.10 : Cheminement de la puissance dans un moteur à rotor bobiné. 13
Figure I.11 : Cheminement de la puissance dans un moteur à double alimentation en mode hypo synchrone.
14
Figure I.12 : Cheminement de la puissance dans un moteur à double alimentation en mode hyper-synchrone.
15
Figure I.13 : Cheminement de la puissance dans un générateur à double alimentation en mode hypo-synchrone. 15
Figure I.14 : Cheminement de la puissance dans un générateur à double alimentation en mode hyper-synchrone.
16
Figure I.15 : Cascade hypo-synchrone. 18
Figure I.16 : Diagramme simplifié 1. 19
Figure I.17 : Diagramme simplifié 2. 21
Figure I.18 : Diagramme simplifié 3. 23
Figure I.19 : Diagramme simplifié 4. 24
Liste des figures
UDL-SBA-2010 xiv
Figure I.20 :
Figure I.21 :
Figure I.22 :
Diagramme simplifié 5.
Diagramme simplifié 6.
Diagramme simplifié 7.
Chapitre II
25
25
26
Figure II.1 : Représentation de la structure de principe de la MADA triphasée. 33
Figure II.2 : Repères de référence : statorique , rotorique et tournant d-q. 34
Figure II.3 : Schémas-bloc des modes électriques. 38
Figure II.4 : Schéma-bloc du mode mécanique. 39
Figure II.5 : Schéma-bloc du mode électrique statoriques. 42
Figure II.6 : Schéma-bloc du mode mécanique. 43
Figure II.7 : Le schéma bloc de simulation de la MADA alimenté en tension. 44
Figure II.8 : Réponses du système avec = 0 V, = 50 Hz, =0 N.m 44
Figure II.9 : Réponses du système avec = 0 V, = 50 Hz, =10 N.m 45
Figure II.10 : Réponses du système avec = 12 V, = 5 Hz, =10 N.m 45
Figure II.11 : Réponses du système avec = 12 V, = 20 Hz, =10 N.m 46
Figure II.12 : Réponses du système avec = 30 V, = 5 Hz, =10 N.m 46
Figure II.13 : Réponses du système avec = 30 V, = 5 Hz, =20 N.m 47
Figure II.14 : Schéma synoptique proposé pour l’alimentation de la machine. 48
Figure II.15 : Représentation du redresseur triphasé à diodes 49
Figure II.16 : Représentation de la Tension redressée 50
Figure II.17 : Filtre RLC passe-bas 51
Figure II.18 : Onduleur de tension triphasé à deux niveaux 52
Figure II.19 : Représentation d’un GTO 52
Figure II.20 : Principe de la commande MLI- ST 55
Figure II.21 : Réponses de système avec = 12 V, = 5 Hz, =10 N.m 56
Liste des figures
UDL-SBA-2010 xv
Figure III.1 :
Chapitre III
Analogie entre la commande vectorielle d’une MADA et la commande d’une MCC.
62
Figure III.2 : Orientation du flux statorique 62
Figure III.3 : Régulation des courants par retour d’état 65
Figure III.4 : Situation schématique des flux dans une machine à double alimentation. 66
Figure III.5 : Chaîne de régulation du flux statorique 68
Figure III.6 : Chaîne de régulation de la vitesse. 69
Figure III.7 : Schéma synoptique de la commande vectorielle de la MADA. 70
Figure III.8 : Réponses du système étudié 71
Figure III.9 : Variation des paramètres électriques pour un cycle de fonctionnement. 74
Figure III.10 : Réponses du système étudié avec incertitudes constantes de la MADA (R-50% et L-30%). 75
Figure III.11 :
Figure III.12 :
Réponses du système étudié avec incertitudes évolutives de la MADA.
Réponses du système étudié avec une variation des paramètres mécaniques de la MADA (+200% et +500%).
76
78
Figure IV.1 :
Chapitre VI
Structure de régulation par ajout de la commande équivalente
81
Figure IV.2 : Convergence de la trajectoire vers la surface de commutation grâce à la discontinuité de la commande 83
Figure IV.3 : Les différents modes de trajectoire dans le plan de phase. 85
Figure IV.4 : Commande équivalente . 86
Figure IV.5 : Définition de la fonction SIGN. 90
Figure IV.6 : Démonstration du phénomène de réticence 91
Figure IV.7 : Définition de la fonction SIGN avec un seuil 92
Figure IV.8 : Définition de la fonction SIGN de la commande adoucie 92
Liste des figures
UDL-SBA-2010 xvi
Figure IV.9 : Définition de la fonction intégrale 93
Figure IV.10 : Définition de la fonction SAT 94
Figure IV.11 : La structure de régulateur de vitesse à mode glissant appliqué à la MADA.
96
Figure IV.12 : Réponse du système avec régulateur de vitesse à mode glissant. 97
Figure IV.13 : Réponse du système avec incertitudes constantes de la MADA (R-50% et L-30%).
99
Figure IV.14 : Réponse du système avec incertitudes évolutives de la MADA. 100
Figure IV.15 : Réponse du système avec une variation des paramètres mécaniques de la MADA (+200% et +500%).
101
Figure A.1 :
Annexe
Décomposition de la transformation de Park.
105
Figure A.2 : Repères de référence : statorique , rotorique et tournant d-q 107
Figure B.1 : Cycle de fonctionnement de la machine 109
Figure C.1 : Principe de découplage par retour d’état 112
Liste des tableaux
UDL-SBA-2010 xvii
Liste des tableaux
Tableau II.1 :
Tableau IV.1 :
Etablissement des expressions des tensions simples et composées.
Comparaison entre le régulateur classique PI et le régulateur à mode glissant.
54
102
Tableau B.1 : Valeurs des paramètres de simulation 108
Tableau B.2 : Cycle de fonctionnement de la machine 109
Introduction générale
Introduction générale
UDL-SBA-2010 1
Introduction générale
Depuis l’ère de l’industrialisation, les chercheurs ont été affronté au "comment commander
les machines électriques à des vitesses variables". Car les entraînements électriques exigent de
plus en plus de hautes performances, une fiabilité accrue, et un coût réduit.
Au 19éme siècle, ce problème à été résolu avec les moteurs à courant continu, dont on peut
modifier la vitesse de rotation de 0 à la vitesse maximale, et ceci en agissant sur la tension
d’induit en gardant le flux d’induction constant. Cependant, la présence du système balais-
collecteur les pénalise : ces machines ne peuvent servir ni dans le domaine des grandes
puissances, ni en milieux corrosifs, s’y ajoute aussi l’entretien que nécessite le collecteur [43].
Ces contraintes ont donc orienté la recherche dans le domaine de la vitesse variable vers les
machines à courant alternatif, et plus particulièrement vers les machines asynchrones. Celles-
ci ont en effet de nombreux avantages: coût de fabrication réduit, construction relativement
simple, support des surcharges, vitesse de rotation plus élevée et n’exigent pas d’entretien
permanent. L’inconvénient de cette catégorie de machines réside dans la complexité de leur
fonctionnement, car elles se comportent comme des systèmes multi-variables, non linéaires et
fortement couplés, d’où la difficulté de leur commande [48].
Grâce à l’évolution technologique récente de l’électronique de puissance et de la micro-
informatique, les problèmes inhérents aux commandes des machines alternatives ont été
résolus, rendant ainsi les machines à courant continu de moins en moins utilisées.
L’électronique de puissance permet de générer des grandeurs électriques de fréquence, de
tension et de courant variable, tout en assurant un rendement élevé. Les convertisseurs sont
associés à une électronique numérique de commande permettant l’implantation de puissants
algorithmes de contrôle en temps réel.
Il existe une nouvelle solution utilisant la machine alternative fonctionnant dans un mode un
peu particulier, il s’agit de la machine asynchrone à double alimentation "MADA" : c’est une
machine asynchrone triphasée avec un rotor bobiné qui peut être alimentée par deux source de
tensions l’un au stator et l’autre au rotor.
Introduction générale
UDL-SBA-2010 2
Un intérêt de plus en plus croissant est accordé à cette machine. Cet intérêt est dû aux
degrés de liberté qu’elle offre du fait de l’accessibilité de son rotor et donc de la possibilité de
l’alimenter par un convertisseur aussi bien du côté du stator que du côté du rotor et un
élargissement de la plage de vitesse (hyposynchrone, synchrone, hypersynchrone) [48].
Pour un fonctionnement à des vitesses variables on doit insérer à la machine un
convertisseur à M.L.I (Modulation à Largeur d’Impulsions) entre la machine et le réseau. Car,
quelle que soit la vitesse de rotation de la machine, la tension est redressée et un onduleur
connecté côté réseau est chargé d’assurer la cohérence entre la fréquence du réseau et celle
délivrée par le dispositif.
La machine asynchrone à double alimentation est essentiellement non linéaire, dû au
couplage entre le flux et le couple électromagnétique. La commande vectorielle par
orientation du flux selon un axe privilégié permet d’assurer un découplage entre le flux et le
couple. Le but de cette technique est d'arriver à commander la machine asynchrone comme
une machine à courant continu à excitation indépendante où il y a un découplage naturel entre
la grandeur commandant le flux (le courant d'excitation) et celle lié au couple (le courant
d'induit) [33].
Un autre aspect extrêmement important dans la réalisation de variateurs est la notion de
robustesse. Les modèles utilisés sont approximatifs et ont des paramètres variables selon l’état
du système et son point de fonctionnement. La variation des paramètres électriques et
mécaniques dégradent les performances des commandes et peuvent amener, dans certains cas,
à des fonctionnements instables [41]. Deux approches permettent de pallier à ce problème.
- La première consiste à assurer une estimation en temps réel des paramètres, au moins
de ceux reconnus comme responsables des perturbations majeures. Ces paramètres
ainsi redéfinis sont injectés dans les commandes. Cette méthode a l’avantage de
permettre cette connaissance presque continue des paramètres, mais l’inconvénient
c’est qu’elle nécessite des calculateurs de puissance élevée en raison des volumes de
calcul nécessaires pour cette estimation en temps réel.
- La deuxième approche retenue pour ce mémoire est de rechercher des structures de
commande qui résistent aux incertitudes paramétriques élevées et qui permettent la
mise en œuvre de variateurs ayant les comportements les moins influencés par les
Introduction générale
UDL-SBA-2010 3
variations des paramètres. L’avantage principal de cette approche est la réduction du
matériel et du temps de calcul.
Le point de départ de cette étude a été d'aller vers une "Commande en vitesse par mode
glissant d'une machine asynchrone à double alimentation". A travers ce mémoire, qui est
composé de quatre chapitres, nous allons brosser un tableau de toutes les étapes à franchir
pour parvenir à ce résultat.
Le premier chapitre aborde l'étude sous une forme assez descriptive. En effet, à travers une
étude bibliographique. Nous présentons un état de l’art sur la MADA, afin d’étudier son
principe de fonctionnement et d’évaluer les avantages et les performances apportés par cette
machine, dans les différents domaines d’application. En plus, une classification des différents
types de cette machine sera présentée.
Le deuxième chapitre fera l’objet d’une étude de modélisation de la MADA et de son
alimentation statorique et rotorique. Deux types de modélisation de la MADA (type courant
et type flux) serons présentes. Un modèle mathématique biphasé de la MADA sera introduit.
Des simulations seront présentées.
Le troisième chapitre concerne " Le contrôle vectoriel de la MADA avec découplage par
retour d’état". La linéarisation du modèle non linéaire de la machine peut se faire de
différentes manières avec des termes de compensation divers. Il est proposé dans ce chapitre
un retour d’état non linéaire pour assurer un découplage entrée-sortie du système multi -
variables que constitue la MADA avec orientation de flux statorique et une régulation
classique types PI. La deuxième partie du chapitre est consacrée à l’étude de la robustesse de
la commande vis-à-vis des incertitudes paramétriques. Plusieurs phénomènes sont
responsables des incertitudes sur les paramètres électriques et mécaniques : la température,
l’effet de peau, la saturation magnétique et les erreurs de mesure. Les performances de cette
commande vectorielle seront montrées par des résultats de simulation.
Le quatrième chapitre aborde l'aspect commande à mode glissant. Après un bref rappel de
quelques éléments de théorie nécessaires pour la mise en œuvre d'une régulation à structure
variable, nous appliqueront la commande à mode glissant à notre MADA. La structure retenue
est une configuration utilisant le principe de la commande équivalente. La surface de
commutation nécessaire pour l'utilisation d'une régulation à mode glissant est choisie égale à
Introduction générale
UDL-SBA-2010 4
l'erreur. Le vecteur de commande équivalente permet de maintenir le système en mode
glissant sur la surface de commutation. L’étude de la robustesse de la commande vis-à-vis des
incertitudes paramétriques sera étudiée en comparant les résultats de simulation obtenus au
troisième chapitre.
Nous finirons ce travail par une conclusion générale qui résumera l’ensemble des résultats
obtenus, des recommandations et des suggestions sur les travaux futurs dans ce domaine de
recherche.
Chapitre I
L’état de l'art de la machine
asynchrone à double
alimentation
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 5
Chapitre I
L’état de l'art de la machine asynchrone à double alimentation
I.1. Introduction
La machine asynchrone à double alimentation (MADA) a fait l’objet de vastes recherches
dans les laboratoires d’électrotechnique, et dans le but d’apporter un éclairage permettant au
lecteur de mieux connaître les étapes franchies qui ont marqué son évolution et les domaines
où elle est utilisée.
Ce chapitre dresse un état de l’art sur la MADA. Il permet ainsi de mettre en évidence
l’évolution qu’a connue cette machine depuis que les progrès tangibles ont été réalisés dans
divers domaines tels que : les matériaux d’électrotechnique, l’informatique et l’électronique
de puissance.
I.2. Description de la machine asynchrone à double alimentation
La première apparition de la machine asynchrone à double alimentation "doubly-fed
induction machine (DFIM) ", date de l’année 1899 [20], [36] ; il ne s’agit pas d’une nouvelle
structure mais d’un nouveau mode d’alimentation [48].
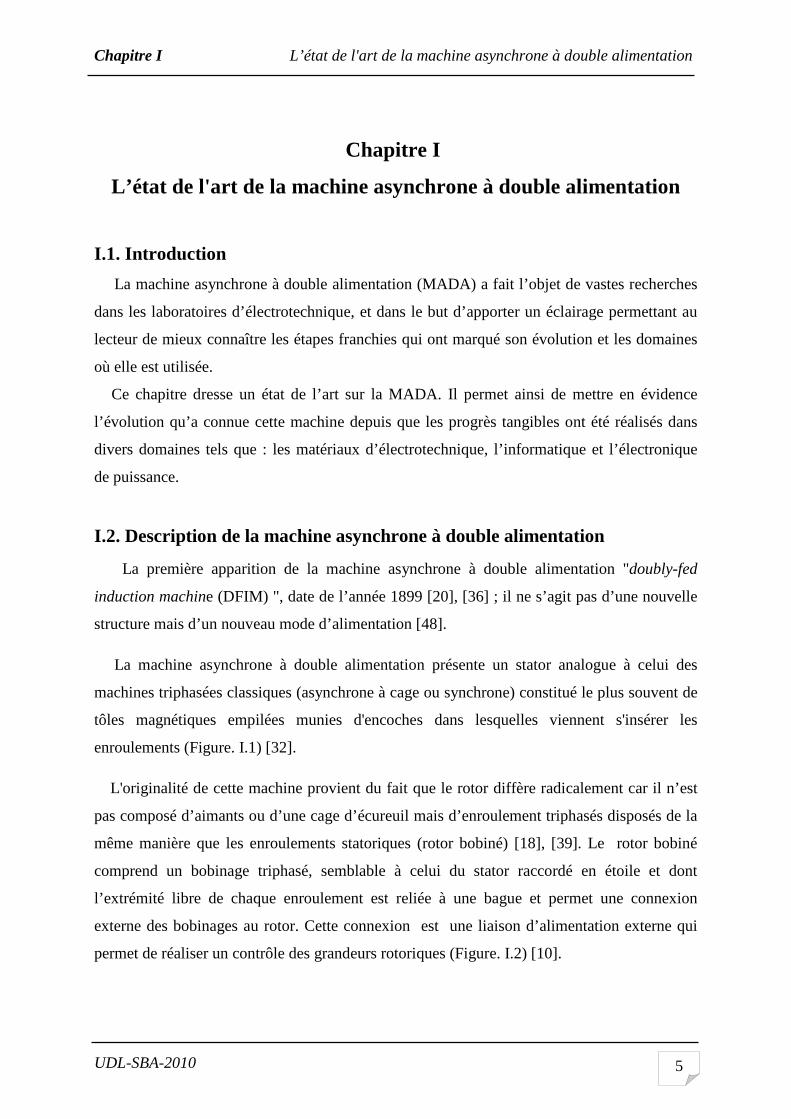
La machine asynchrone à double alimentation présente un stator analogue à celui des
machines triphasées classiques (asynchrone à cage ou synchrone) constitué le plus souvent de
tôles magnétiques empilées munies d'encoches dans lesquelles viennent s'insérer les
enroulements (Figure. I.1) [32].
L'originalité de cette machine provient du fait que le rotor diffère radicalement car il n’est
pas composé d’aimants ou d’une cage d’écureuil mais d’enroulement triphasés disposés de la
même manière que les enroulements statoriques (rotor bobiné) [18], [39]. Le rotor bobiné
comprend un bobinage triphasé, semblable à celui du stator raccordé en étoile et dont
l’extrémité libre de chaque enroulement est reliée à une bague et permet une connexion
externe des bobinages au rotor. Cette connexion est une liaison d’alimentation externe qui
permet de réaliser un contrôle des grandeurs rotoriques (Figure. I.2) [10].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 6
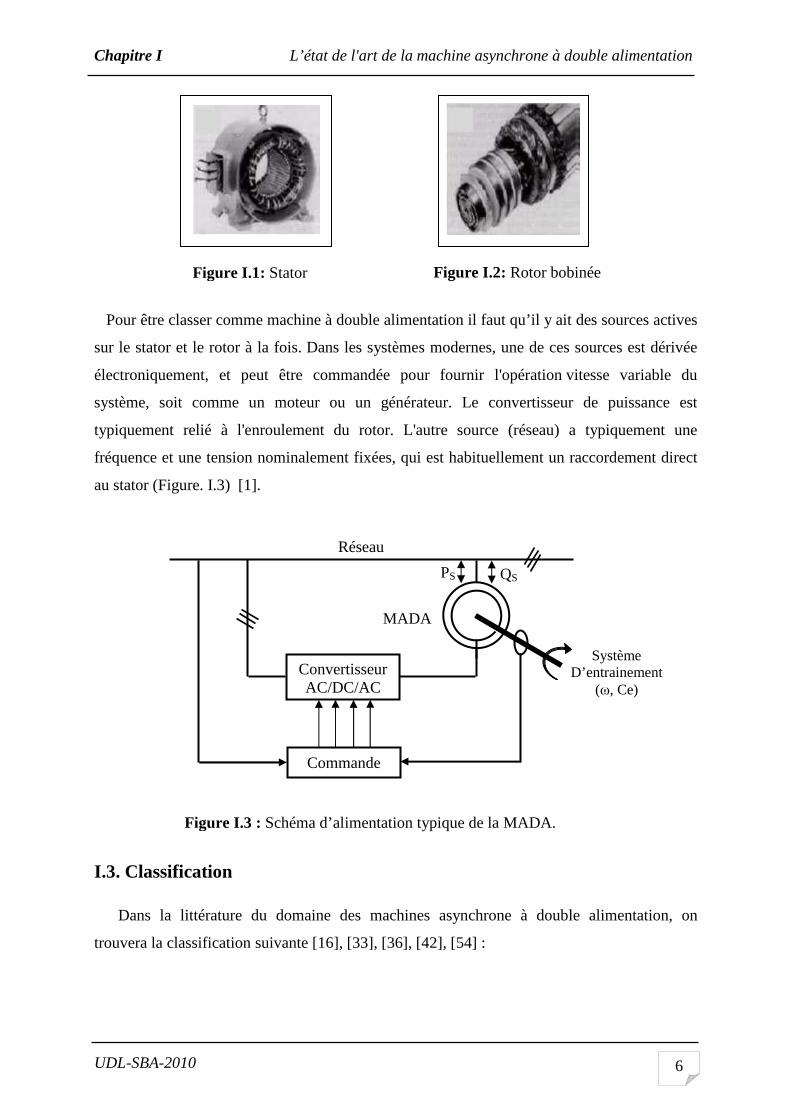
Pour être classer comme machine à double alimentation il faut qu’il y ait des sources actives
sur le stator et le rotor à la fois. Dans les systèmes modernes, une de ces sources est dérivée
électroniquement, et peut être commandée pour fournir l'opération vitesse variable du
système, soit comme un moteur ou un générateur. Le convertisseur de puissance est
typiquement relié à l'enroulement du rotor. L'autre source (réseau) a typiquement une
fréquence et une tension nominalement fixées, qui est habituellement un raccordement direct
au stator (Figure. I.3) [1].
I.3. Classification
Dans la littérature du domaine des machines asynchrone à double alimentation, on
trouvera la classification suivante [16], [33], [36], [42], [54] :
Figure I.2: Rotor bobinée Figure I.1: Stator
Figure I.3 : Schéma d’alimentation typique de la MADA.
Système D’entrainement
(ω, Ce)
MADA
PS QS
Réseau
Convertisseur AC/DC/AC
Commande
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 7
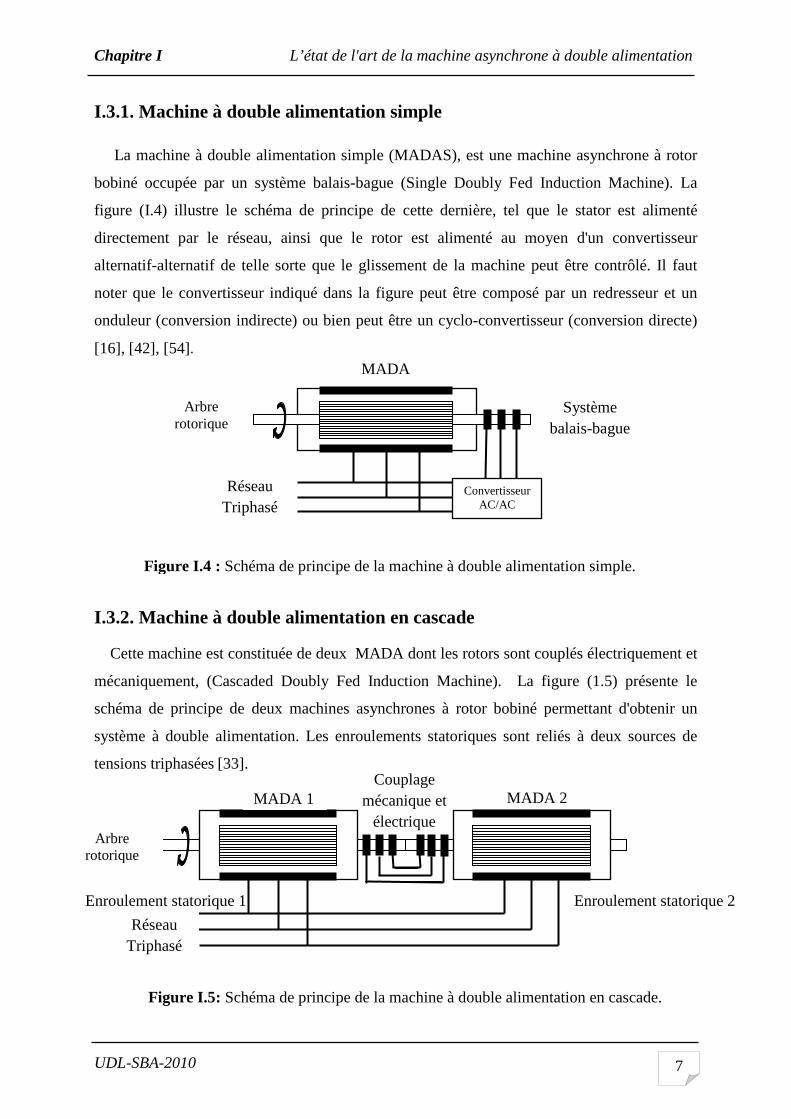
I.3.1. Machine à double alimentation simple
La machine à double alimentation simple (MADAS), est une machine asynchrone à rotor
bobiné occupée par un système balais-bague (Single Doubly Fed Induction Machine). La
figure (I.4) illustre le schéma de principe de cette dernière, tel que le stator est alimenté
directement par le réseau, ainsi que le rotor est alimenté au moyen d'un convertisseur
alternatif-alternatif de telle sorte que le glissement de la machine peut être contrôlé. Il faut
noter que le convertisseur indiqué dans la figure peut être composé par un redresseur et un
onduleur (conversion indirecte) ou bien peut être un cyclo-convertisseur (conversion directe)
[16], [42], [54].
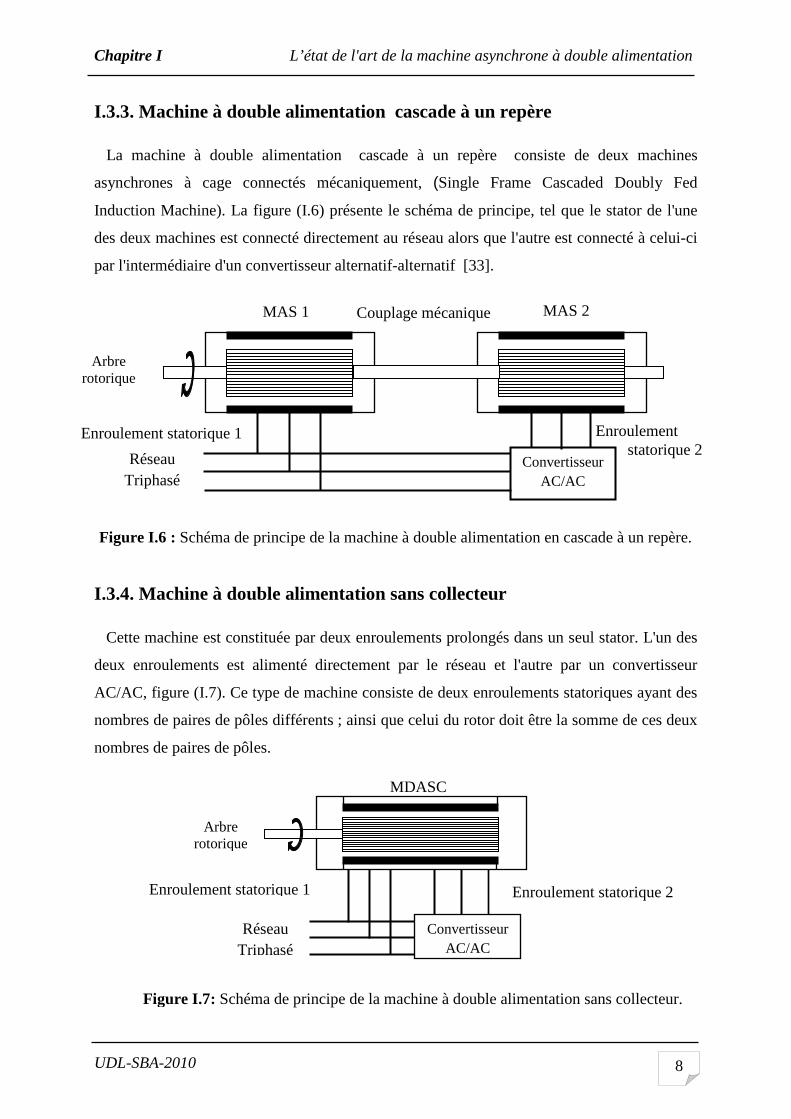
I.3.2. Machine à double alimentation en cascade
Cette machine est constituée de deux MADA dont les rotors sont couplés électriquement et
mécaniquement, (Cascaded Doubly Fed Induction Machine). La figure (1.5) présente le
schéma de principe de deux machines asynchrones à rotor bobiné permettant d'obtenir un
système à double alimentation. Les enroulements statoriques sont reliés à deux sources de
tensions triphasées [33].
Figure I.5: Schéma de principe de la machine à double alimentation en cascade.
Couplage mécanique et
électrique
Enroulement statorique 1
Réseau Triphasé
MADA 1 MADA 2
Enroulement statorique 2
Arbre rotorique
Figure I.4 : Schéma de principe de la machine à double alimentation simple.
Convertisseur AC/AC
Réseau Triphasé
MADA
Arbre rotorique
Système balais-bague
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 8
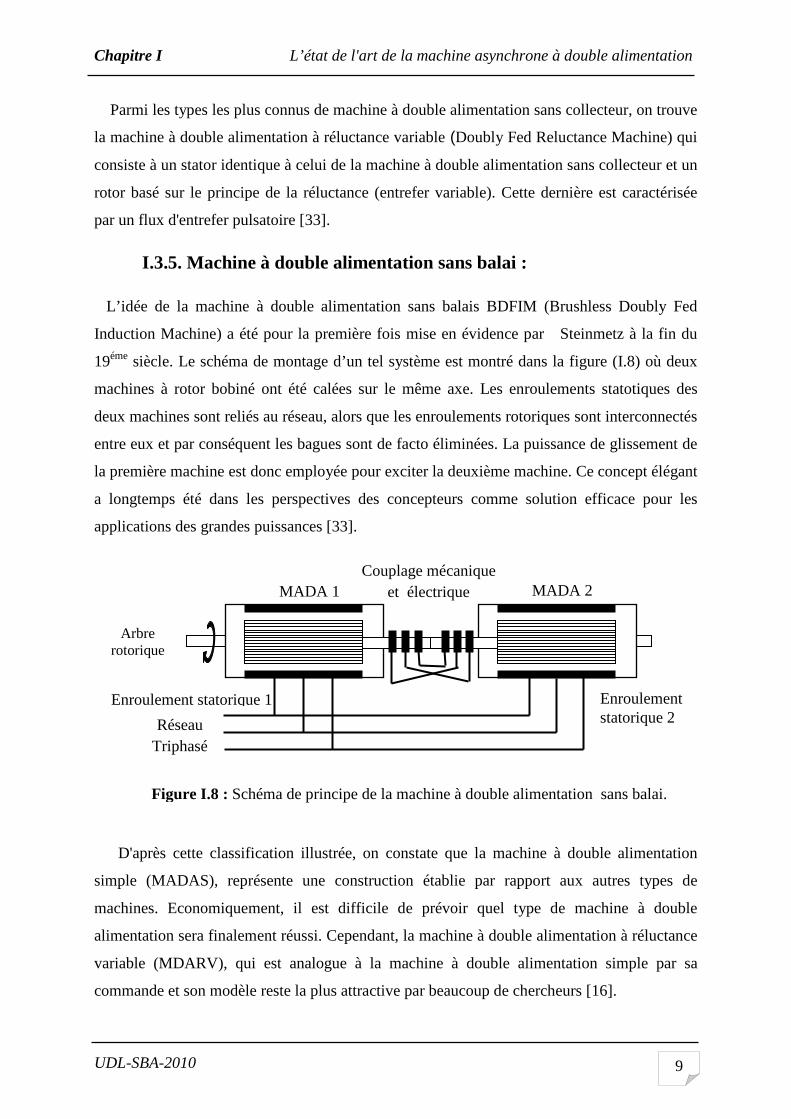
I.3.3. Machine à double alimentation cascade à un repère
La machine à double alimentation cascade à un repère consiste de deux machines
asynchrones à cage connectés mécaniquement, (Single Frame Cascaded Doubly Fed
Induction Machine). La figure (I.6) présente le schéma de principe, tel que le stator de l'une
des deux machines est connecté directement au réseau alors que l'autre est connecté à celui-ci
par l'intermédiaire d'un convertisseur alternatif-alternatif [33].
I.3.4. Machine à double alimentation sans collecteur
Cette machine est constituée par deux enroulements prolongés dans un seul stator. L'un des
deux enroulements est alimenté directement par le réseau et l'autre par un convertisseur
AC/AC, figure (I.7). Ce type de machine consiste de deux enroulements statoriques ayant des
nombres de paires de pôles différents ; ainsi que celui du rotor doit être la somme de ces deux
nombres de paires de pôles.
Figure I.6 : Schéma de principe de la machine à double alimentation en cascade à un repère.
Couplage mécanique
Enroulement statorique 2
Convertisseur AC/AC
Réseau Triphasé
MAS 1 MAS 2
Enroulement statorique 1
Arbre rotorique
Figure I.7: Schéma de principe de la machine à double alimentation sans collecteur.
MDASC
Réseau Triphasé
Enroulement statorique 1 Enroulement statorique 2
Convertisseur AC/AC
Arbre rotorique
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 9
Parmi les types les plus connus de machine à double alimentation sans collecteur, on trouve
la machine à double alimentation à réluctance variable (Doubly Fed Reluctance Machine) qui
consiste à un stator identique à celui de la machine à double alimentation sans collecteur et un
rotor basé sur le principe de la réluctance (entrefer variable). Cette dernière est caractérisée
par un flux d'entrefer pulsatoire [33].
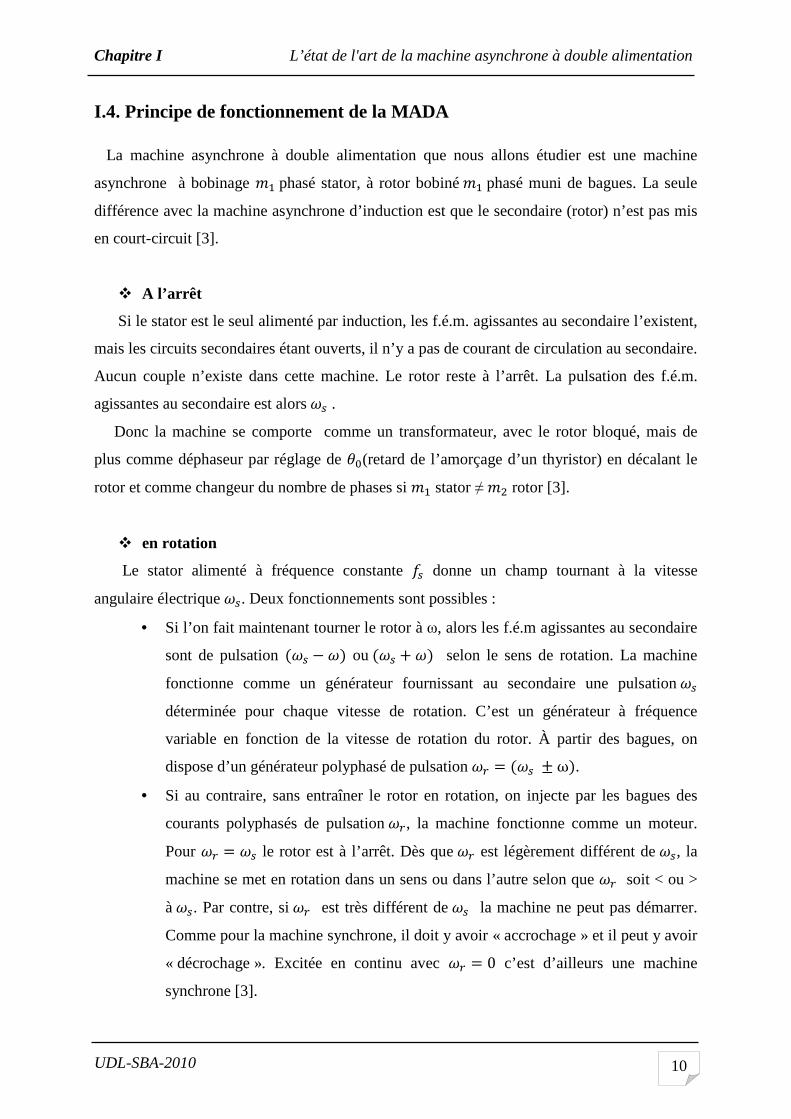
I.3.5. Machine à double alimentation sans balai :
L’idée de la machine à double alimentation sans balais BDFIM (Brushless Doubly Fed
Induction Machine) a été pour la première fois mise en évidence par Steinmetz à la fin du
19éme siècle. Le schéma de montage d’un tel système est montré dans la figure (I.8) où deux
machines à rotor bobiné ont été calées sur le même axe. Les enroulements statotiques des
deux machines sont reliés au réseau, alors que les enroulements rotoriques sont interconnectés
entre eux et par conséquent les bagues sont de facto éliminées. La puissance de glissement de
la première machine est donc employée pour exciter la deuxième machine. Ce concept élégant
a longtemps été dans les perspectives des concepteurs comme solution efficace pour les
applications des grandes puissances [33].
D'après cette classification illustrée, on constate que la machine à double alimentation
simple (MADAS), représente une construction établie par rapport aux autres types de
machines. Economiquement, il est difficile de prévoir quel type de machine à double
alimentation sera finalement réussi. Cependant, la machine à double alimentation à réluctance
variable (MDARV), qui est analogue à la machine à double alimentation simple par sa
commande et son modèle reste la plus attractive par beaucoup de chercheurs [16].
Figure I.8 : Schéma de principe de la machine à double alimentation sans balai.
Enroulement statorique 1
Réseau Triphasé
Couplage mécanique et électrique MADA 1 MADA 2
Enroulement statorique 2
Arbre rotorique
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 10
I.4. Principe de fonctionnement de la MADA
La machine asynchrone à double alimentation que nous allons étudier est une machine
asynchrone à bobinage phasé stator, à rotor bobiné phasé muni de bagues. La seule
différence avec la machine asynchrone d’induction est que le secondaire (rotor) n’est pas mis
en court-circuit [3].
A l’arrêt
Si le stator est le seul alimenté par induction, les f.é.m. agissantes au secondaire l’existent,
mais les circuits secondaires étant ouverts, il n’y a pas de courant de circulation au secondaire.
Aucun couple n’existe dans cette machine. Le rotor reste à l’arrêt. La pulsation des f.é.m.
agissantes au secondaire est alors .
Donc la machine se comporte comme un transformateur, avec le rotor bloqué, mais de
plus comme déphaseur par réglage de (retard de l’amorçage d’un thyristor) en décalant le
rotor et comme changeur du nombre de phases si stator ≠ rotor [3].
en rotation
Le stator alimenté à fréquence constante donne un champ tournant à la vitesse
angulaire électrique . Deux fonctionnements sont possibles :
• Si l’on fait maintenant tourner le rotor à ω, alors les f.é.m agissantes au secondaire
sont de pulsation ou selon le sens de rotation. La machine
fonctionne comme un générateur fournissant au secondaire une pulsation
déterminée pour chaque vitesse de rotation. C’est un générateur à fréquence
variable en fonction de la vitesse de rotation du rotor. À partir des bagues, on
dispose d’un générateur polyphasé de pulsation ω.
• Si au contraire, sans entraîner le rotor en rotation, on injecte par les bagues des
courants polyphasés de pulsation , la machine fonctionne comme un moteur.
Pour le rotor est à l’arrêt. Dès que est légèrement différent de , la
machine se met en rotation dans un sens ou dans l’autre selon que soit < ou >
à . Par contre, si est très différent de la machine ne peut pas démarrer.
Comme pour la machine synchrone, il doit y avoir « accrochage » et il peut y avoir
« décrochage ». Excitée en continu avec 0 c’est d’ailleurs une machine
synchrone [3].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 11
Remarque : Les deux champs stator et rotor créent un couple instantané. Ce couple est moteur
si et sont voisins. Ce couple est pulsatoire si et sont très différents, d’où la
nécessité d’un autopilotage de si et sont imposées. Un fonctionnement en
double alimentation avec autopilotage est différent. Imposant , la pulsation statorique
est déterminée et imposée en tenant compte de la rotation mesurée du rotor en réalisant
. Il n’y a plus de décrochage. On retrouvera ce type de fonctionnement dans la
cascade hyposynchrone [3].
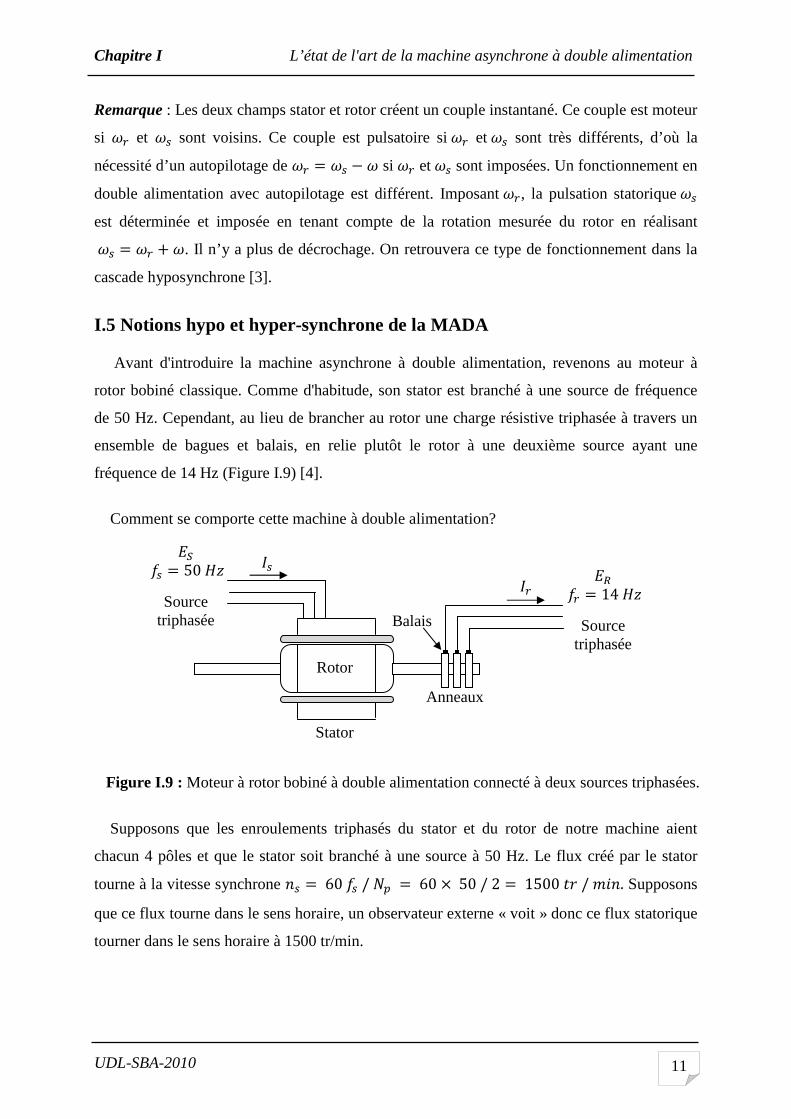
I.5 Notions hypo et hyper-synchrone de la MADA Avant d'introduire la machine asynchrone à double alimentation, revenons au moteur à
rotor bobiné classique. Comme d'habitude, son stator est branché à une source de fréquence
de 50 Hz. Cependant, au lieu de brancher au rotor une charge résistive triphasée à travers un
ensemble de bagues et balais, en relie plutôt le rotor à une deuxième source ayant une
fréquence de 14 Hz (Figure I.9) [4].
Comment se comporte cette machine à double alimentation?
Supposons que les enroulements triphasés du stator et du rotor de notre machine aient
chacun 4 pôles et que le stator soit branché à une source à 50 Hz. Le flux créé par le stator
tourne à la vitesse synchrone 60 / 60 50 / 2 1500 / . Supposons
que ce flux tourne dans le sens horaire, un observateur externe « voit » donc ce flux statorique
tourner dans le sens horaire à 1500 tr/min.
Figure I.9 : Moteur à rotor bobiné à double alimentation connecté à deux sources triphasées.
Balais
Anneaux
!
50 "#
Source triphasée
$
14 "#
Source triphasée
&
&
Stator
Rotor

Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 12
Puisque le rotor est branché à une source à 14 Hz, celui- ci produit un flux tournant à une
vitesse 60 / 60 14 / 2 420 / par rapport au rotor. Ce flux
tourne également dans le sens horaire par rapport au rotor.
Pour que les pôles du stator restent alignés aux pôles du rotor, il faut que notre observateur
externe voie les pôles du rotor tourner à la même vitesse que les pôles du stator. Il s'ensuit que
le flux rotorique doit tourner dans le sens horaire à 1500 tr/min. Cela implique que le rotor
doit lui-même tourner à une vitesse de 1500 - 420 = 1080 tr/min. Toute autre vitesse
produirait en effet un glissement continuel des pôles du rotor par rapport aux pôles du stator.
Le couple moyen serait alors nul et le moteur s’arrêterait.
On constate donc que cette machine peut fonctionner en moteur si, et seulement si, sa
vitesse est exactement de 1080 tr/min. On dit alors qu'elle fonctionne à une vitesse
sous-synchrone ou hypo-synchrone.
En permutant deux des trois fils de la source à 14 Hz reliées aux balais, on force le flux
tournant produit par le rotor à changer de sens par rapport au rotor (sens anti-horaire). Dans
ces conditions, pour que les pôles du stator restent alignés avec les pôles du rotor, il faut que
le rotor tourne maintenant à une vitesse de 1500 + 420 = 1920 tr/min. On dit alors que le
moteur fonctionne à une vitesse hyper-synchrone.
A partir de cet exemple, on peut généraliser et montrer que lorsqu'un moteur à rotor bobiné
est alimenté par deux sources, il doit tourner à une des deux vitesses suivantes :
120
'()* +(,'*- I. 1
Ou
120
'()- +(,'*- &. 2
Où :
: vitesse du rotor [tr/min].
: fréquence appliquée au stator [Hz].
: fréquence appliquée au rotor [Hz].
: nombre de paire de pôles de la machine.
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 13
Pour une fréquence donnée, la vitesse dépend de la séquence des phases de la tension
triphasée appliquée au rotor. Une séquence directe produit une vitesse sous-synchrone
(équation. I.1), alors qu'une séquence inverse produit une vitesse hyper-synchrone
(équation. I.2).
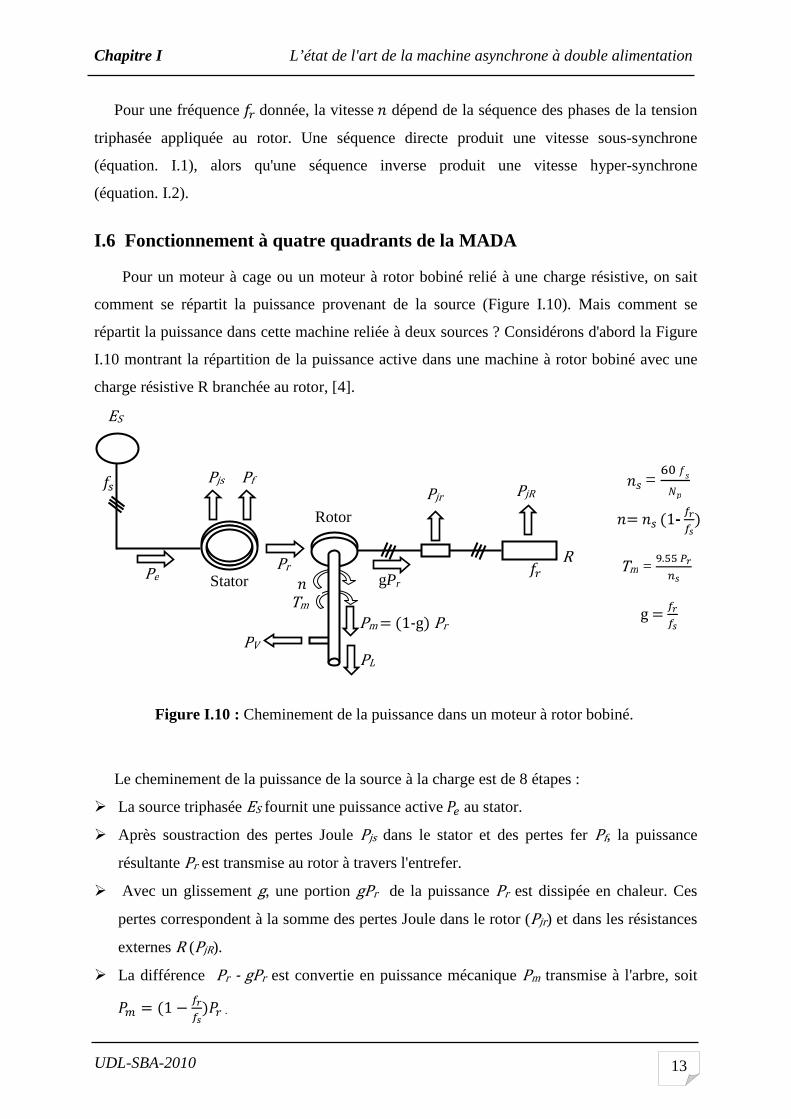
I.6 Fonctionnement à quatre quadrants de la MADA
Pour un moteur à cage ou un moteur à rotor bobiné relié à une charge résistive, on sait
comment se répartit la puissance provenant de la source (Figure I.10). Mais comment se
répartit la puissance dans cette machine reliée à deux sources ? Considérons d'abord la Figure
I.10 montrant la répartition de la puissance active dans une machine à rotor bobiné avec une
charge résistive R branchée au rotor, [4].
Le cheminement de la puissance de la source à la charge est de 8 étapes :
La source triphasée ES fournit une puissance active 12 au stator.
Après soustraction des pertes Joule Pjs dans le stator et des pertes fer Pf, la puissance
résultante Pr est transmise au rotor à travers l'entrefer.
Avec un glissement g, une portion gPr de la puissance Pr est dissipée en chaleur. Ces
pertes correspondent à la somme des pertes Joule dans le rotor (Pjr) et dans les résistances
externes R (PjR).
La différence Pr - gPr est convertie en puissance mécanique Pm transmise à l'arbre, soit
1< 1 =>
=?1 .
Figure I.10 : Cheminement de la puissance dans un moteur à rotor bobiné.
= @
+
)
1---- =>
=?
Tm = B.CC D>E?
g =>
=?
R
gPr
PL
Pm 1-g Pr
Tm
PV
Pjr PjR
Rotor
Pr
ES
Stator
Pf Pjs
Pe

Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 14
Figure I.11. Cheminement de la puissance dans un moteur à double alimentation en mode hypo synchrone.
(1---- =>
=?)
Per Pe
gPr Pm (1-g) Pr
Pf Pjs
PL
Pjr
PV
Pr Rotor
Stator
ER ES
Tm
On doit soustraire les pertes par friction et ventilation Pv pour obtenir la puissance
mécanique nette PL transmise à la charge.
Introduisons maintenant la relation entre le glissement g, la fréquence statorique et la
fréquence rotorique : g soit g =>
=?
On peut maintenant exprimer la puissance mécanique en fonction de la fréquence
statorique , de la fréquence rotorique et de la puissance Pr transmise au rotor, soit:
1< 1 =>=?)1 La puissance électrique fournie par le rotor est J 1 1<
=>
=?.
Cette puissance est dissipée sous forme de chaleur dans les enroulements du rotor (Pjr)
et dans les résistances externes (PjR).
Le couple développé par le moteur est toujours donné par : Tm = B.CC D>E?
Après ce rappel sur le fonctionnement du moteur à rotor bobiné, revenons à notre machine
à double alimentation fonctionnant en mode sous-synchrone et en mode hyper-synchrone, [4].
I.6.1. Fonctionnement en mode moteur hypo synchrone
La figure I.11 montre que la puissance est fournie par le réseau au stator et la puissance de
glissement transite par le rotor pour être réinjectée au réseau. On a donc un fonctionnement
moteur en dessous de la vitesse de synchronisme [39]. Ce régime est généralement connu
comme mode de récupération d’énergie de glissement [36].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 15
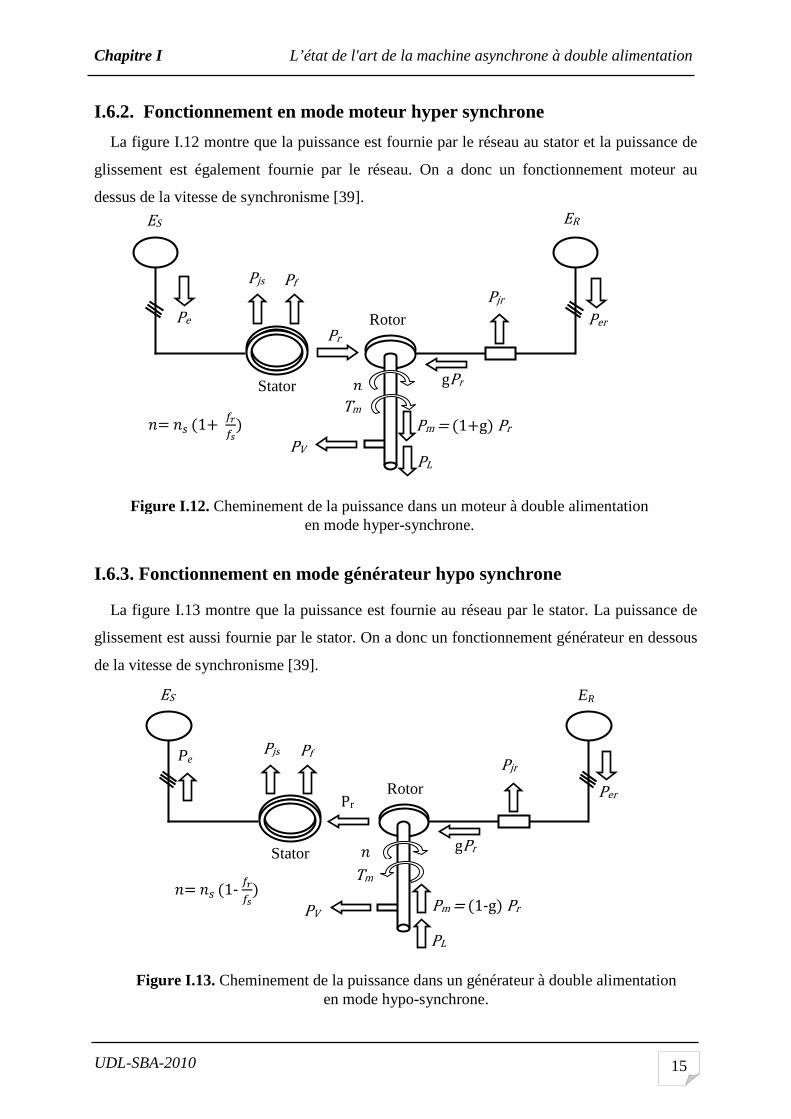
I.6.2. Fonctionnement en mode moteur hyper synchrone
La figure I.12 montre que la puissance est fournie par le réseau au stator et la puissance de
glissement est également fournie par le réseau. On a donc un fonctionnement moteur au
dessus de la vitesse de synchronisme [39].
I.6.3. Fonctionnement en mode générateur hypo synchrone
La figure I.13 montre que la puissance est fournie au réseau par le stator. La puissance de
glissement est aussi fournie par le stator. On a donc un fonctionnement générateur en dessous
de la vitesse de synchronisme [39].
Figure I.12. Cheminement de la puissance dans un moteur à double alimentation en mode hyper-synchrone.
(1+ =>
=?)
Per
PV
gPr
Pm (1+g) Pr
PL
Rotor
Stator
ER ES
Pe
Pf Pjs
Pr
Pjr
Tm
Figure I.13. Cheminement de la puissance dans un générateur à double alimentation en mode hypo-synchrone.
= (1- =>
=?)
Per
Pe
Pr
Pf Pjs
PV
gPr
Pjr
Pm = (1-g) Pr
PL
Rotor
Stator
ER ES
Tm
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 16
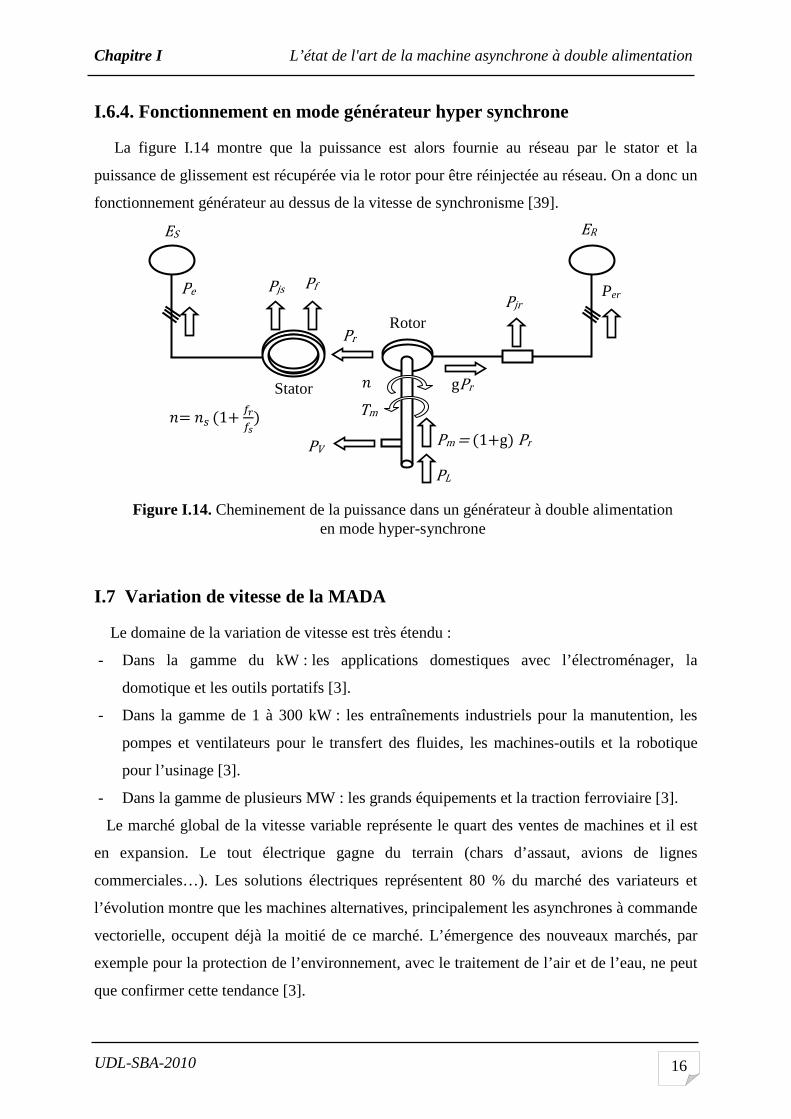
Figure I.14. Cheminement de la puissance dans un générateur à double alimentation en mode hyper-synchrone
(1+ =>
=?)
Pe Per
Pr
Pf Pjs
gPr
PV
Pjr
Pm = (1+g) Pr
PL
Rotor
Stator
ER ES
Tm
I.6.4. Fonctionnement en mode générateur hyper synchrone
La figure I.14 montre que la puissance est alors fournie au réseau par le stator et la
puissance de glissement est récupérée via le rotor pour être réinjectée au réseau. On a donc un
fonctionnement générateur au dessus de la vitesse de synchronisme [39].
I.7 Variation de vitesse de la MADA
Le domaine de la variation de vitesse est très étendu :
- Dans la gamme du kW : les applications domestiques avec l’électroménager, la
domotique et les outils portatifs [3].
- Dans la gamme de 1 à 300 kW : les entraînements industriels pour la manutention, les
pompes et ventilateurs pour le transfert des fluides, les machines-outils et la robotique
pour l’usinage [3].
- Dans la gamme de plusieurs MW : les grands équipements et la traction ferroviaire [3].
Le marché global de la vitesse variable représente le quart des ventes de machines et il est
en expansion. Le tout électrique gagne du terrain (chars d’assaut, avions de lignes
commerciales…). Les solutions électriques représentent 80 % du marché des variateurs et
l’évolution montre que les machines alternatives, principalement les asynchrones à commande
vectorielle, occupent déjà la moitié de ce marché. L’émergence des nouveaux marchés, par
exemple pour la protection de l’environnement, avec le traitement de l’air et de l’eau, ne peut
que confirmer cette tendance [3].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 17
La variation de la vitesse des moteurs asynchrones est assez difficile en générale parce que
ces moteurs sont déjà préréglés. Seulement avec l’apparition de l’électronique de puissance,
il est possible d’agir et de modifier la vitesse.
Pour faire varier la vitesse d’une machine asynchrone, deux actions sont possibles ; action
sur le stator ou action sur le rotor [25].
Coté stator
Modification du nombre de paires de pôles KL : Ceci donne une variation non
continue de la vitesse. Ce mode n’est donc pas envisagé pour un réglage fin du point
de fonctionnement désiré [56].
Changement de la tension appliquée au moteur Le couple électromagnétique de la
machine asynchrone est proportionnel au carré de la tension d’alimentation
statorique. Il est donc possible d’envisager un ajustement de la vitesse au dessous de
la vitesse nominale en modifiant la tension d’alimentation statorique avec un
gradateur triphasé. Cette solution est le plus souvent utilisée pour le démarrage de
charges à caractéristique de couple quadratique (M NO) [56].
Changement de la fréquence du réseau : La fréquence de rotation de la machine
étant au glissement près proportionnel à la fréquence d’alimentation des
enroulements statoriques, on essaiera de créer pour ces enroulements un réseau à
fréquence variable : ce sont les onduleurs de tension. On peut aussi chercher à
injecter des courants dans les enroulements pour imposer le couple de la machine :
ce sont les onduleurs de courant ou commutateurs de courant. On peut également
convertir directement la fréquence du réseau industriel en une fréquence variable
plus faible (de 0 à 1/3 de la fréquence réseau) à l’aide d’un cycloconvertisseur à
commutation naturelle piloté lui aussi en fréquence en courant ou vectoriellement
[56].
Coté rotor
Variation des résistances rotoriques (action sur le glissement): L’utilisation de
résistances rotoriques permet un réglage de la vitesse au dessous de la vitesse
nominale mais avec un rendement déplorable. on essaiera donc de récupérer
cette énergie transmise au rotor : c’est la cascade hyposynchrone réservée à la
très forte puissance pour des machines à rotor bobiné [56].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 18
L’une des solutions pour obtenir des vitesses variables est la double alimentation. Se
système est réversible en vitesse et en couple, dans tout les cas les vitesses hypo synchrones et
hyper synchrones sont possibles.
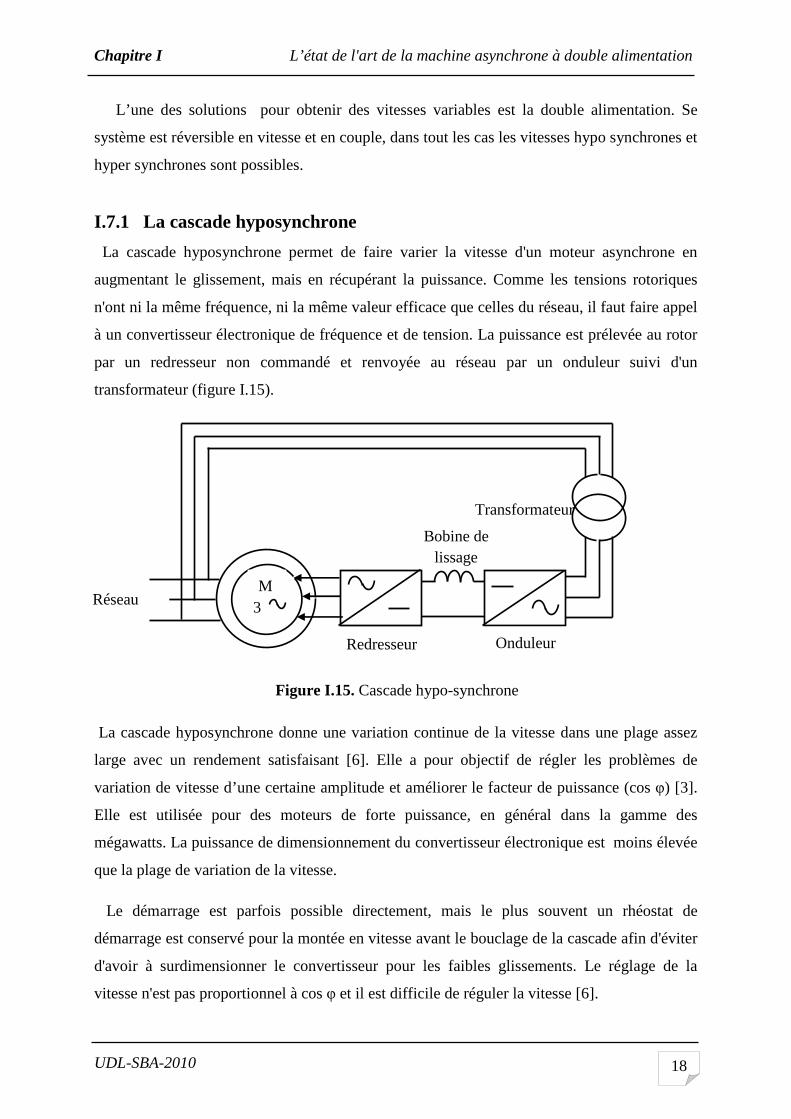
I.7.1 La cascade hyposynchrone
La cascade hyposynchrone permet de faire varier la vitesse d'un moteur asynchrone en
augmentant le glissement, mais en récupérant la puissance. Comme les tensions rotoriques
n'ont ni la même fréquence, ni la même valeur efficace que celles du réseau, il faut faire appel
à un convertisseur électronique de fréquence et de tension. La puissance est prélevée au rotor
par un redresseur non commandé et renvoyée au réseau par un onduleur suivi d'un
transformateur (figure I.15).
La cascade hyposynchrone donne une variation continue de la vitesse dans une plage assez
large avec un rendement satisfaisant [6]. Elle a pour objectif de régler les problèmes de
variation de vitesse d’une certaine amplitude et améliorer le facteur de puissance (cos φ) [3].
Elle est utilisée pour des moteurs de forte puissance, en général dans la gamme des
mégawatts. La puissance de dimensionnement du convertisseur électronique est moins élevée
que la plage de variation de la vitesse.
Le démarrage est parfois possible directement, mais le plus souvent un rhéostat de
démarrage est conservé pour la montée en vitesse avant le bouclage de la cascade afin d'éviter
d'avoir à surdimensionner le convertisseur pour les faibles glissements. Le réglage de la
vitesse n'est pas proportionnel à cos φ et il est difficile de réguler la vitesse [6].
Figure I.15. Cascade hypo-synchrone
Transformateur
Bobine de lissage
Réseau
Redresseur Onduleur
3 M
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 19
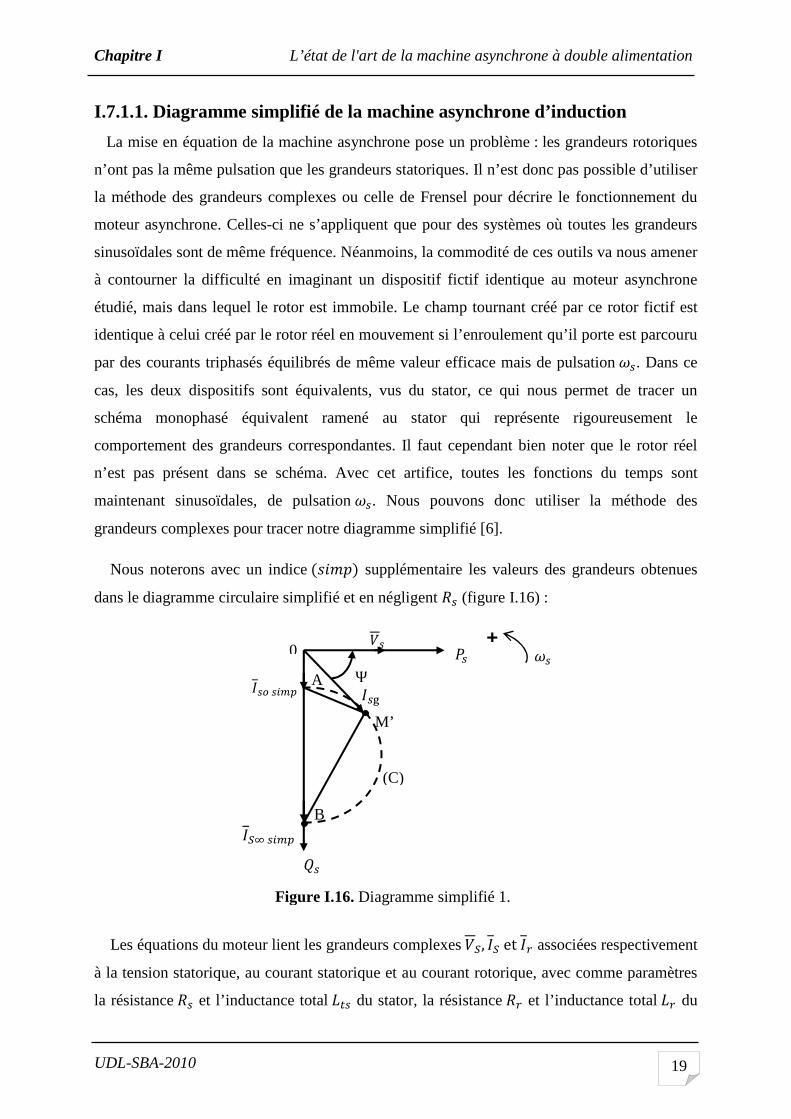
I.7.1.1. Diagramme simplifié de la machine asynchrone d’induction
La mise en équation de la machine asynchrone pose un problème : les grandeurs rotoriques
n’ont pas la même pulsation que les grandeurs statoriques. Il n’est donc pas possible d’utiliser
la méthode des grandeurs complexes ou celle de Frensel pour décrire le fonctionnement du
moteur asynchrone. Celles-ci ne s’appliquent que pour des systèmes où toutes les grandeurs
sinusoïdales sont de même fréquence. Néanmoins, la commodité de ces outils va nous amener
à contourner la difficulté en imaginant un dispositif fictif identique au moteur asynchrone
étudié, mais dans lequel le rotor est immobile. Le champ tournant créé par ce rotor fictif est
identique à celui créé par le rotor réel en mouvement si l’enroulement qu’il porte est parcouru
par des courants triphasés équilibrés de même valeur efficace mais de pulsation . Dans ce
cas, les deux dispositifs sont équivalents, vus du stator, ce qui nous permet de tracer un
schéma monophasé équivalent ramené au stator qui représente rigoureusement le
comportement des grandeurs correspondantes. Il faut cependant bien noter que le rotor réel
n’est pas présent dans se schéma. Avec cet artifice, toutes les fonctions du temps sont
maintenant sinusoïdales, de pulsation . Nous pouvons donc utiliser la méthode des
grandeurs complexes pour tracer notre diagramme simplifié [6].
Nous noterons avec un indice (+)) supplémentaire les valeurs des grandeurs obtenues
dans le diagramme circulaire simplifié et en négligent P (figure I.16) :
Les équations du moteur lient les grandeurs complexes Q!, &! et & associées respectivement
à la tension statorique, au courant statorique et au courant rotorique, avec comme paramètres
la résistance P et l’inductance total TU du stator, la résistance P et l’inductance total T du
&V Ψ
&!X Y<
&Z Y<
M’
0
[
B
(C)
1
Q
+
A
Figure I.16. Diagramme simplifié 1.

Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 20
rotor, l’inductance mutuelle \ entre le stator et le rotor, la pulsation statorique et le
glissement g , peuvent s’écrire:
Q! ]TU& + ]\& (&. 3)
0 = P& + ]TU& + ]\g& (&. 4)
&Z Y< =Q_jLts+ - &_∞ +) Q_jTa++ &. 5
Tel que: TbU TU c?>def> g?hef?i? &+g c?>ef? & &+* +) &. 6
TbU: inductance statorique de fuites totales.
D’où : &V &! Y< c?>ef? & &. 7
Donc : Q! ]TU& ]\& &. 8
0 P& ]TbUg& \TU gQ &. 9
I.7.1.2. Imposition de f.é.m. polyphasées de pulsation gωS au secondaire
d’une MADA
Nous revenons à notre MADA et nous supposons que le rotor tourne et que les champs
soient toujours au synchronisme. Les équations vectorielles s’écrivent [3]: Q! ]TU& ]\& &. 10 P& ]TU& ]\g& &. 11
La f.é.m. imposée est par phase, e √2 cos g – Ψ de pulsation g et r = .-sht
Choisissons ,+- - Ψ cste Pour g u ∞ , &!X gvwex?fi? Pour g 0, il n’y a plus & 0 mais r P & et Q! ]TU& ]\ y$>
En divisant par ]TU on obtient : gvhef?i? &! Y< & c?>ef? y$>
De même, pour un point M’ quelconque :
Q! ]TU& ]\& et gvhef?i? &! Y< &V c?>ef? &

Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 21
Les équations vectorielles de fonctionnement en régime permanent peuvent s’écrire :
Q! ]TU& ]\& &. 12
P& ]TbUg& \TU gQ &. 13
Montrons que le lieu de &V dans le plan complexe est un cercle (C’) de diamètre BA’
(figure. I.17)
On calculera z\|||||||| &!V &!X en partant de P& pour faire apparaître le groupement
$>V ~ y$> &.
On obtient: z\|||||||| $>V ~ y$> & c?>ef? hex>fi? , vsvvsv ] $>V ex>fi? c|||||||| c|||||||||| z\|||||||| est en avant de π/2 sur \||||||||| , angle BM’A’ π/2. Le lieu de M’ est donc un cercle
(C’) de diamètre B A’.
Figure I.17. Diagramme simplifié 2.
||||||| \TU P ,
\|||||||| \TU & , \||||||||| \TU P & &!V &!
\TU &
&!X Y< =&!X
θ’
&V &Z Y<
&Z
M’
A’
A
0
[
B
(C’) (C)
∆’
1
Q
g 0 \TU P
+
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 22
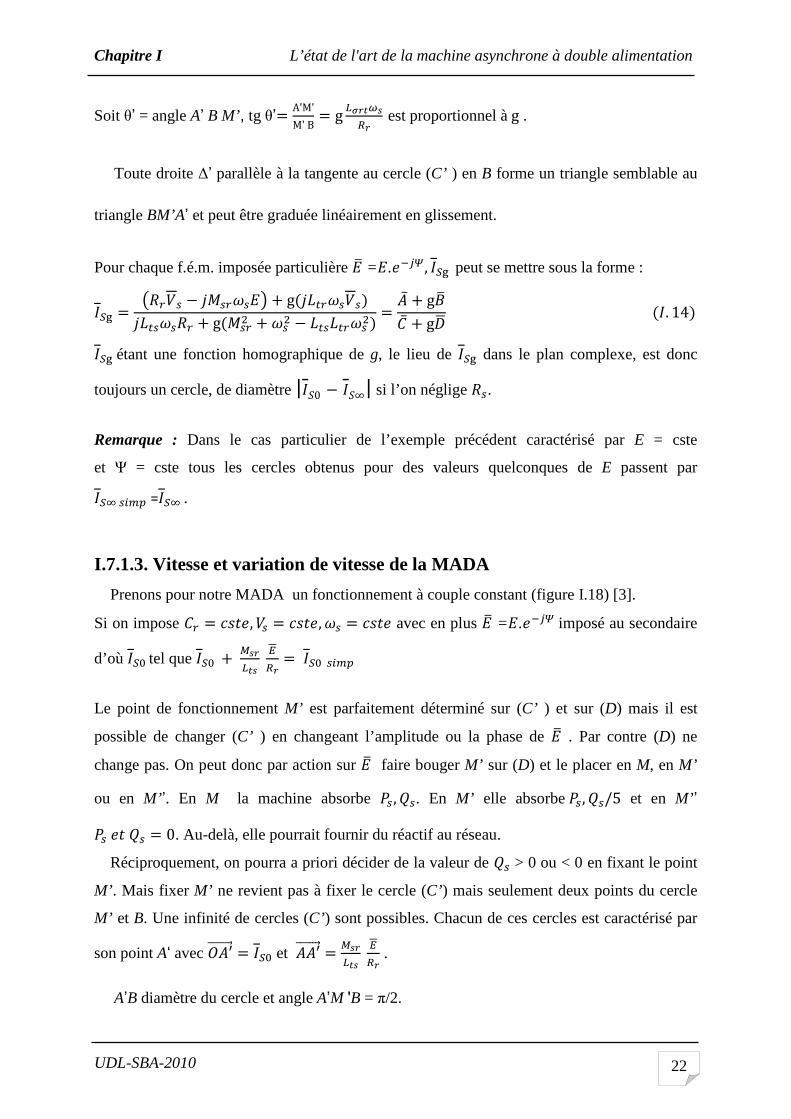
Soit θ’ = angle A’ B M’, tg θ’ A'M'M' B g ex>fi?$> est proportionnel à g .
Toute droite ∆’ parallèle à la tangente au cercle (C’ ) en B forme un triangle semblable au
triangle BM’A’ et peut être graduée linéairement en glissement. Pour chaque f.é.m. imposée particulière r = .-sht, &!V peut se mettre sous la forme :
&!V PQ ]\ g]TUQ]TUP g\ TUTU gzrM g &. 14
&!V étant une fonction homographique de g, le lieu de &!V dans le plan complexe, est donc
toujours un cercle, de diamètre |&_0 &_∞| si l’on néglige P.
Remarque : Dans le cas particulier de l’exemple précédent caractérisé par E = cste
et Ψ = cste tous les cercles obtenus pour des valeurs quelconques de E passent par &!X Y< =&!X . I.7.1.3. Vitesse et variation de vitesse de la MADA
Prenons pour notre MADA un fonctionnement à couple constant (figure I.18) [3].
Si on impose M ,+-, Q ,+-, ,+- avec en plus r = .-sht imposé au secondaire
d’où &! tel que &! c?>ef? y$> &! Y<
Le point de fonctionnement M’ est parfaitement déterminé sur (C’ ) et sur (D) mais il est
possible de changer (C’ ) en changeant l’amplitude ou la phase de r . Par contre (D) ne
change pas. On peut donc par action sur r faire bouger M’ sur (D) et le placer en M, en M’
ou en M’ ’. En M la machine absorbe 1 , [. En M’ elle absorbe 1 , [/5 et en M’ ’
1 - [ 0. Au-delà, elle pourrait fournir du réactif au réseau.
Réciproquement, on pourra a priori décider de la valeur de [ > 0 ou < 0 en fixant le point
M’ . Mais fixer M’ ne revient pas à fixer le cercle (C’) mais seulement deux points du cercle
M’ et B. Une infinité de cercles (C’) sont possibles. Chacun de ces cercles est caractérisé par
son point A‘ avec ||||||| &! et |||||| c?>ef? y$> . A’B diamètre du cercle et angle A’M 'B = π/2.
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
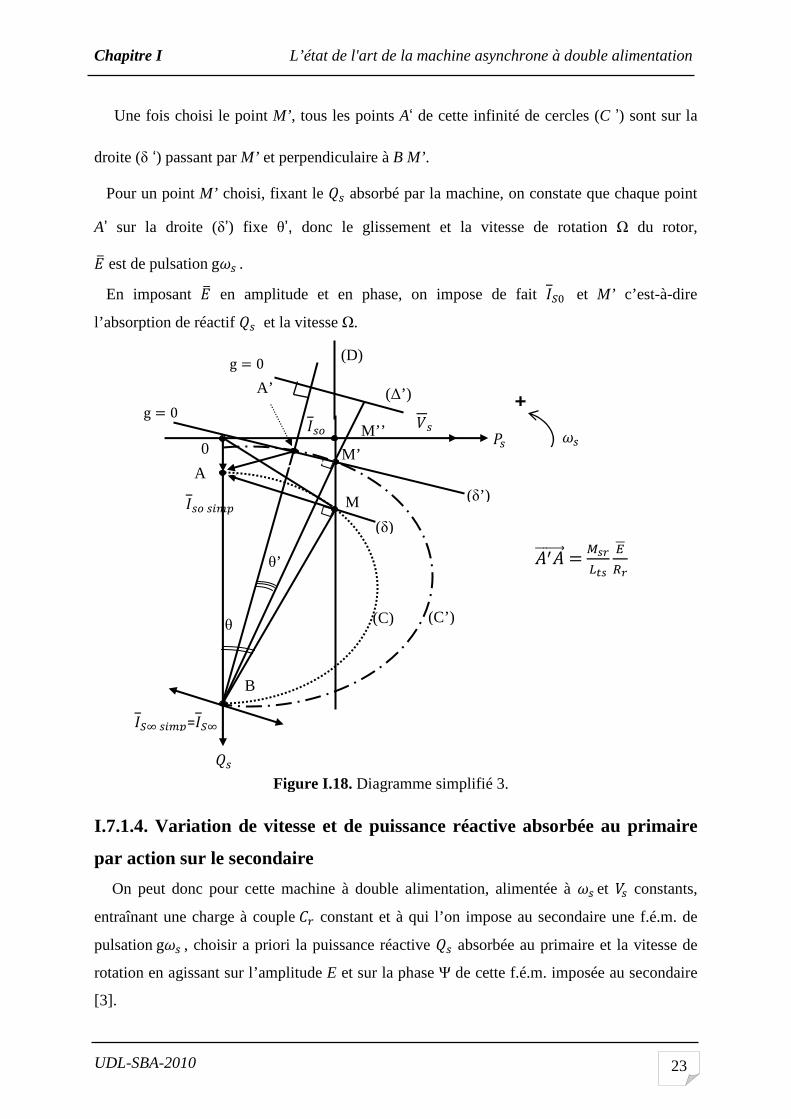
UDL-SBA-2010 23
Une fois choisi le point M’ , tous les points A‘ de cette infinité de cercles (C ’) sont sur la
droite (δ ‘) passant par M’ et perpendiculaire à B M’.
Pour un point M’ choisi, fixant le [ absorbé par la machine, on constate que chaque point
A’ sur la droite (δ’) fixe θ’, donc le glissement et la vitesse de rotation Ω du rotor,
r est de pulsation g . En imposant r en amplitude et en phase, on impose de fait &! et M’ c’est-à-dire
l’absorption de réactif [ et la vitesse Ω.
I.7.1.4. Variation de vitesse et de puissance réactive absorbée au primaire
par action sur le secondaire
On peut donc pour cette machine à double alimentation, alimentée à et Q constants,
entraînant une charge à couple M constant et à qui l’on impose au secondaire une f.é.m. de
pulsation g , choisir a priori la puissance réactive [ absorbée au primaire et la vitesse de
rotation en agissant sur l’amplitude E et sur la phase Ψ de cette f.é.m. imposée au secondaire
[3].
Figure I.18. Diagramme simplifié 3.
||||||| c?>ef?y$>
g 0
g 0
B
(∆’)
(D)
0
(δ’ )
(δ)
&Z Y<
A
M
θ’
θ
&Z
M’ ’
M’
Q 1
[ &!X Y<=&!X
(C) (C’ )
+ A’
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 24
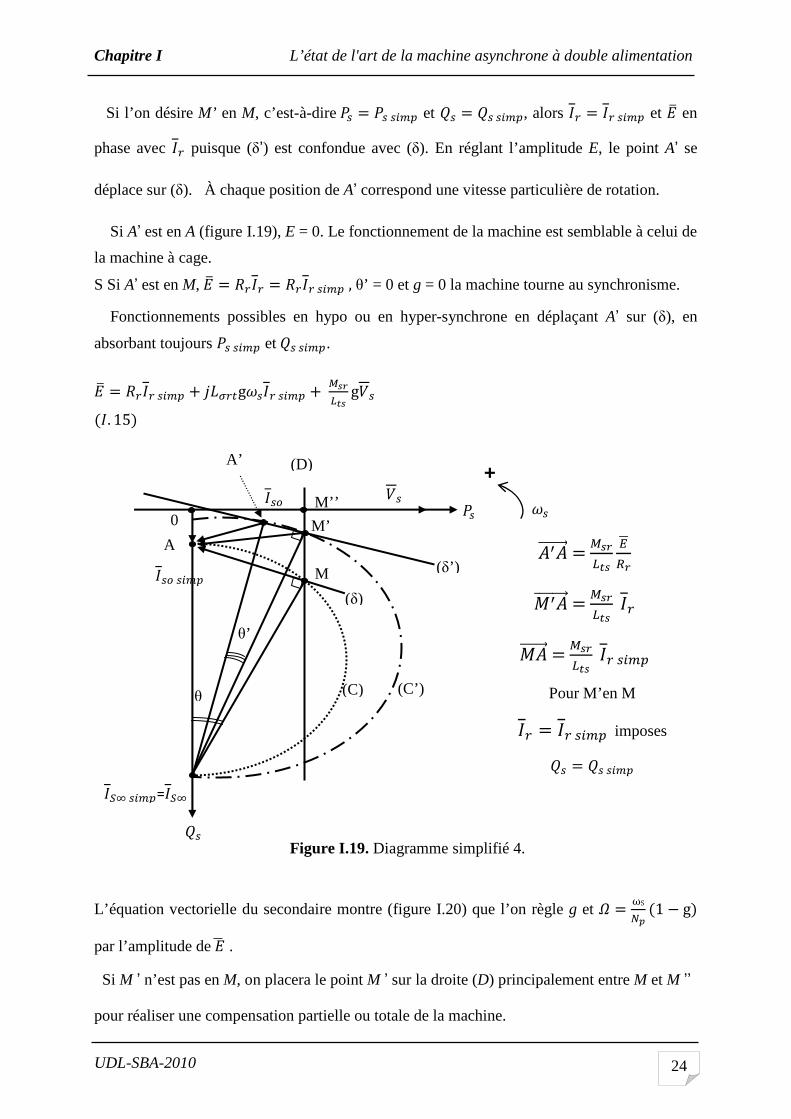
Si l’on désire M’ en M, c’est-à-dire 1 1 Y< et [ [ Y<, alors & & Y< et r en
phase avec & puisque (δ’) est confondue avec (δ). En réglant l’amplitude E, le point A’ se
déplace sur (δ). À chaque position de A’ correspond une vitesse particulière de rotation.
Si A’ est en A (figure I.19), E = 0. Le fonctionnement de la machine est semblable à celui de
la machine à cage.
S Si A’ est en M, r P& P& Y< , θ’ = 0 et g = 0 la machine tourne au synchronisme.
Fonctionnements possibles en hypo ou en hyper-synchrone en déplaçant A’ sur (δ), en
absorbant toujours 1 Y< et [ Y<.
r P& Y< ]TbUg& Y< c?>ef? gQ &. 15
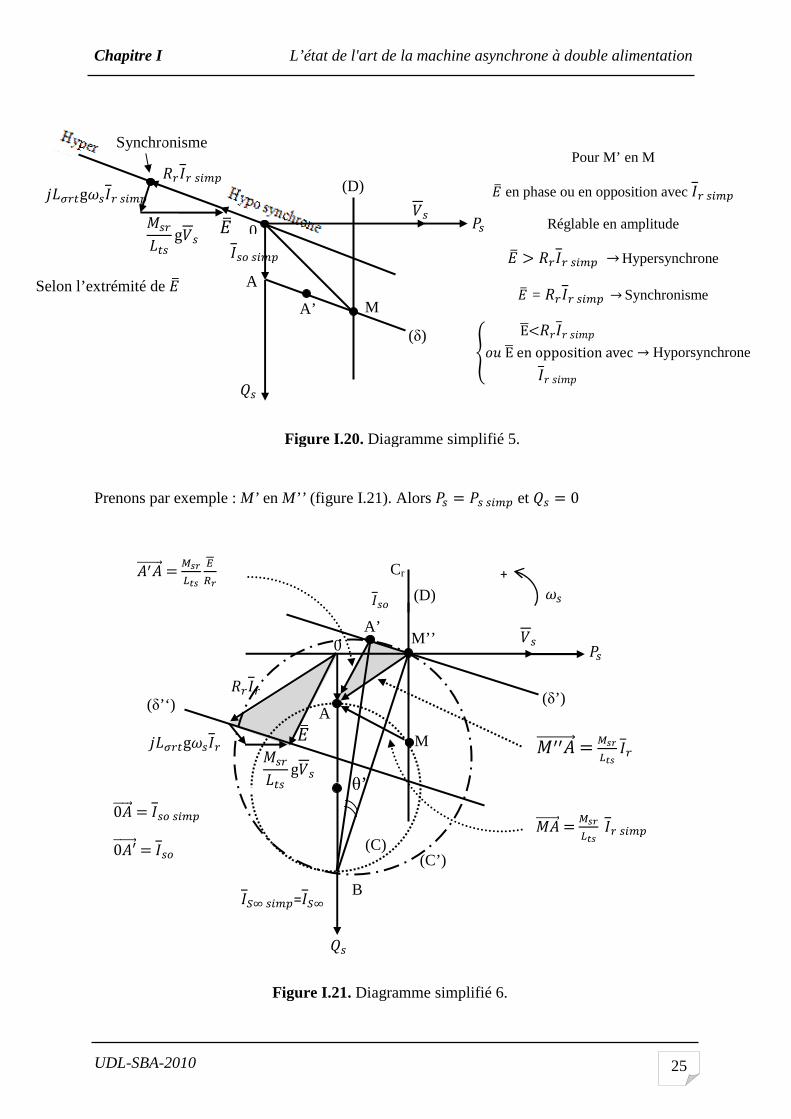
L’équation vectorielle du secondaire montre (figure I.20) que l’on règle g et O ωS 1 g
par l’amplitude de .
Si M ’ n’est pas en M, on placera le point M ’ sur la droite (D) principalement entre M et M ’’
pour réaliser une compensation partielle ou totale de la machine.
Figure I.19. Diagramme simplifié 4.
||||||| c?>ef?y$>
\|||||||| c?>ef? & \|||||| c?>ef? & Y<
[ [ Y<
Pour M’en M & & Y< imposes
0
(D)
(δ’ )
(δ)
&Z Y<
A
M
θ’
θ
&Z
M’ ’
M’
Q 1
[ &!X Y<=&!X
(C) (C’ )
+ A’
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 25
Prenons par exemple : M’ en M’’ (figure I.21). Alors 1 1 Y< et [ 0
Figure I.20. Diagramme simplifié 5.
Pour M’ en M
r en phase ou en opposition avec & Y<
Réglable en amplitude
r P& Y< u Hypersynchrone
r = P& Y< u Synchronisme
EP& +) * E en opposition avec& +) ¡ u Hyporsynchrone
Synchronisme
[
(D)
\TU gQ
]TbUg& Y<
P& Y<
0
A
(δ)
r &Z Y<
A’ M
1 Q
Selon l’extrémité de r
Figure I.21. Diagramme simplifié 6.
+
0||||| &Z Y<
0|||||| &Z
&Z
0
θ’
r
A
\TU gQ
P&
]TbUg&
Cr
B &!X Y<=&!X [
(δ’) (δ’‘)
(D)
A’
(C’) (C)
M
M’’ Q 1
||||||| c?>ef? y$>
\||||||||| c?>ef? &
\|||||| c?>ef? & Y<
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 26
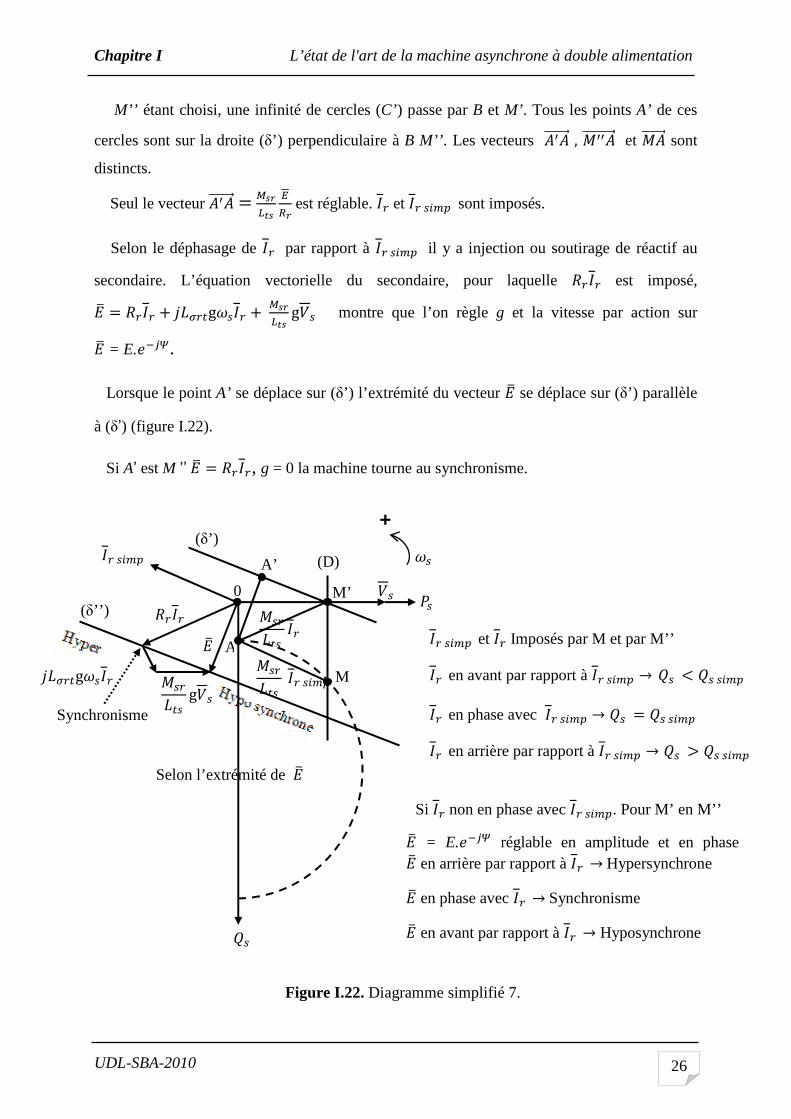
M’’ étant choisi, une infinité de cercles (C’) passe par B et M’ . Tous les points A’ de ces
cercles sont sur la droite (δ’) perpendiculaire à B M’’ . Les vecteurs ||||||| , \||||||||| et \|||||| sont
distincts.
Seul le vecteur ||||||| c?>ef?y
$> est réglable. & et & Y< sont imposés. Selon le déphasage de & par rapport à & Y< il y a injection ou soutirage de réactif au
secondaire. L’équation vectorielle du secondaire, pour laquelle P& est imposé,
r P& ]TbUg& c?>ef? gQ montre que l’on règle g et la vitesse par action sur
r = E.-sht.
Lorsque le point A’ se déplace sur (δ’) l’extrémité du vecteur r se déplace sur (δ’) parallèle
à (δ’) (figure I.22).
Si A’ est M ’’ r P&, g = 0 la machine tourne au synchronisme.
Figure I.22. Diagramme simplifié 7.
& Y<
Synchronisme
0
Selon l’extrémité de r
r \TU & Y<
\TU & ]TbUg& \TU gQ
P&
A’
A
(δ’)
(δ’’) 1 Q
(D)
M’
M
[
+
Si & non en phase avec & Y<. Pour M’ en M’’
& Y< et & Imposés par M et par M’’
& en avant par rapport à & Y< u [ [ Y< & en phase avec & Y< u [ [ Y< & en arrière par rapport à & Y< u [ [ Y<
r = E.-sht réglable en amplitude et en phase r en arrière par rapport à & → Hypersynchrone
r en phase avec & → Synchronisme
r en avant par rapport à & → Hyposynchrone

Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 27
Bilan réactif
Il dépend de la position de M par rapport à M’ . Le réseau fournit la puissance réactive [ demandée. Si l’on fournit par le secondaire la puissance réactive [2< nécessaire à la
machine, elle n’en prend pas sur le réseau.
Intérêt de la compensation
La machine consomme [2< pour sa magnétisation. Possibilité de fourniture ou
d’absorption de puissance réactive au réseau. En pratique, on fournira du réactif par le
secondaire pour réaliser une compensation partielle, voire totale de la machine. Si l’on fournit [2< par le secondaire [ 0.
Le bilan réactif dépend du déphasage de & par rapport à & Y< . Bilan actif
Il dépend de la position de M’ par rapport à A‘. Fonctionnement à couple constant sur réseau, Q ,+-, ,+-, en négligeant les pertes autres que les pertes Joule rotor. g1 1¢$ 1, 1¢$ P&, 1£ 1 g1
Pour la machine à double alimentation, la puissance de glissement g Pr est toujours égale aux
pertes Joule rotor mais augmentée de la puissance active soutirée aux bagues ou diminuée de
la puissance active injectée au rotor. g1 1¢$ 1Z£UYé2 1YEh2¤Ué2.
Dans la cascade hyposynchrone, on soutirera la puissance active au rotor g1 1¢$ 1.
Le fonctionnement au synchronisme serait obtenu en injectant une puissance active P égale
aux pertes Joule rotor. 1¢$ P&, g1 1¢$ 1 0, ′- \′, P& Le bilan actif se fait par comparaison de avec &. Synchronisme si P&.
I.8 Domaines d’application de la MADA
Actuellement la machine asynchrone à double alimentation occupe une large place dans les
applications industrielles, grâce à ces nombreux avantages. En effet, la MADA est très utilisée
en mode générateur dans les applications d’énergie renouvelable notamment dans les
systèmes éoliens, [38]. De plus, le fonctionnement en générateur présente la MADA comme
une alternative sérieuse aux machines synchrones classiques dans de nombreux systèmes de
production d'énergie décentralisée tel que, [32] :
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 28
• Les générateurs des réseaux de bord des navires ou des avions ;
• Les centrales hydrauliques à débit et vitesse variables ;
• Les groupes électrogènes pour lesquels la réduction de vitesse pendant les périodes de
faible consommation permet de réduire sensiblement la consommation de carburant.
La MADA peut être utilisée aussi dans d’autres applications importantes nécessitant un
fort couple de démarrage, tel que [33] :
• La métallurgie avec les enrouleuses et les dérouleuses de bobines ;
• La traction, avec notamment des applications de type transport urbain ou propulsion
maritime ;
• Et enfin l’application de levage, les ascenseurs, les monte-charges etc... .
On note que les applications de la MADA en moteur sont relativement très limitées, parmi
celles-ci on trouve principalement, la traction électrique et les systèmes de pompage [48].
I.9 Avantages et inconvénients de la MADA
Comme les autres machines, la MADA présente quelques avantages et inconvénients qui
sont liés à plusieurs facteurs : sa structure, sa stratégie de commande et ses applications.
I.9.1 Avantages de la MADA
Parmi ses nombreux avantages, nous citons :
• L’accessibilité au stator et au rotor offre l’opportunité d’avoir plusieurs degrés de
liberté pour bien contrôler le transfert des puissances et le facteur de puissance avec
toutes les possibilités de récupération ou l’injection d’énergie dans les enroulements
de la machine [36].
• La mesure des courants au stator et rotor, contrairement à la machine à cage, donnant
ainsi une plus grande flexibilité et précision au contrôle du flux et du couple
électromagnétique [41].
• La capacité de pouvoir augmenter la plage de variation de la vitesse autour de la
vitesse de synchronisme. De plus, l’application de la commande vectorielle associée à
une technique de commande moderne permet d’obtenir un couple nominal sur une
grande plage de vitesse [32], [41].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 29
• Dans la MADA, le circuit rotorique peut être piloté par un convertisseur de fréquence
de puissance relativement faible par rapport au stator. Ce convertisseur rotorique de
haute commutation est utilisé pour réaliser de hautes performances dynamiques en
termes de temps de réponse, de minimisation des harmoniques et d’amélioration de
rendement [36].
• L'utilisation d'une MADA permet de réduire la taille des convertisseurs d'environ
70 % en faisant varier la vitesse par action sur la fréquence d'alimentation des
enroulements rotoriques. Ce dispositif est par conséquent économique et,
contrairement à la machine asynchrone à cage, il n'est pas consommateur de puissance
réactive et peut même être fournisseur [32].
• En fonctionnement générateur, l'alimentation du circuit rotorique à fréquence variable
permet de délivrer une fréquence fixe au stator même en cas de variation de vitesse.
Ce fonctionnement présente la MADA comme une alternative sérieuse aux machines
synchrones classiques dans de nombreux systèmes de production d'énergie
décentralisée [32].
• Son utilisation est préférée pour ses propriétés de réglage de vitesse par action sur des
résistances placées dans le circuit rotorique, et encore sa possibilité de démarrer sans
demander un courant important du réseau [48].
• La MADA présente une puissance massique légèrement plus élevée que les autres
machines à grandes puissances [41].
• La MADA se comporte comme une machine synchrone et l’on peut pratiquer des
rapports de démagnétisation très importants (de l’ordre de 1 à 6) [41].
• La possibilité de fonctionner à couple constant au delà de la vitesse nominale [41].
• Un fonctionnement en régime dégradé, si l’un des deux onduleurs tombe en panne,
plus souple que la machine à simple alimentation [41].
I.9.2 Inconvénients de la MADA
Tout d’abord, la MADA est une machine asynchrone ; alors le premier inconvénient est que
sa structure est non linéaire, ce qui implique la complexité de sa commande. En plus de ça, on
peut citer les inconvénients suivants :
• Elle est plus longue à causes des balais [41].
Chapitre I L’état de l'art de la machine asynchrone à double alimentation
UDL-SBA-2010 30
• Elle est plus volumineuse qu'une MAS à cage de puissance équivalente. L'aspect
multi-convertisseurs, augmente le nombre de convertisseurs et par conséquent le prix.
Pourtant certaines études prétendent le contraire [33].
• Nous utilisons un nombre des convertisseurs (deux redresseurs et deux onduleurs ou
un redresseur et deux onduleurs) plus importants que la machine à cage (un redresseur
et un onduleur) [41].
I.10. Conclusion Après avoir passé en revue l’état de l’art sur la MADA, on constate l’intérêt grandissant
accordé par les divers auteurs à cette machine. Les différents articles sur la MADA montrent
que les machines à courant alternatif sont en passe d’inaugurer une ère nouvelle dans le
domaine des grandes puissances.
Ces études portent principalement sur son fonctionnement en génératrice, pour des
applications éoliennes et hydroélectriques, ou sur son fonctionnement en moteur avec une
grande variété de modes d’alimentation et de contrôle. La simplicité de sa commande et sa
souplesse de reconfiguration lui ont associée le surnom d’une « Machine Généralisée ».
Nous nous concentrons le long de ce travail sur le fonctionnement de la MADA en mode
moteur à vitesse variable alimentée par deux onduleurs de tension, au stator et au rotor.
Le chapitre suivant (II) sera dédié à présenter la modélisation de cette machine.
Chapitre II
Modélisation de la MADA et
de son alimentation
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 31
Chapitre II
Modélisation de la MADA et de son alimentation
II.1. Introduction
L'étude du comportement d'un système est une tache difficile et qui nécessite, avant tout,
une bonne connaissance de son modèle dynamique afin de bien prédire, par voie de
simulation, son comportement dans les différents modes de fonctionnement envisagés. Nous
devrons disposer d’un modèle mathématique qui représente d’une manière satisfaisante le
comportement réel de ce système.
Pour les machines électriques tournantes, la modélisation nécessite une parfaite
connaissance de la structure électrique (alimentation électrique) et de la structure mécanique
(masse tournante, couple résistant, frottement visqueux) [33].
La modélisation de la machine asynchrone est généralement traitée par la méthode des deux
axes qui utilise la théorie de l’espace vectoriel pour le passage d’un système triphasé réel à un
système diphasé fictif. Pour certaines raisons, un certain nombre d’hypothèses simplificatrices
(à définir et à respecter) peuvent être adoptées dans l’élaboration des modèles mathématiques
[48].
Dans le présent chapitre, nous présenterons deux types de modélisation de la MADA (type
courant et type flux) et de son alimentation. Nous débuterons par la mise en équation de la
MADA en exprimant les équations électriques, magnétiques et mécaniques qui régissent son
fonctionnement dans le référentiel triphasé que l’on notera (A, B, C). Nous réduirons l’ordre
du système et éliminerons la dépendance qui existe entre les coefficients d’inductances et la
position du rotor par la transformation de Park. Cette transformation nous permettra de donner
un nouveau modèle de la MADA dans le référentiel biphasé de Park noté usuellement
(d, q). Ensuite, nous aborderons la modélisation de l’onduleur de tension et leur commande
MLI de type sinus triangle. Une série de simulations réalisées à l’aide du logiciel
MATLAB/SIMULINK a été envisagée, non seulement dans le but de vérifier les
performances de l’association Convertisseurs-MADA sous différentes conditions et valider
les modèles obtenus, mais aussi en vue de leur emploi pour valider les stratégies de
commandes développées dans les chapitres suivants.
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 32
II.2. Mise en équation de la MADA
II.2.1. Hypothèses simplificatrices et Conventions Nous supposons que la machine est constituée d’un stator et d’un rotor cylindrique et
coaxiaux dont les enroulements sont symétriques, triphasés et répartis d’une façon sinusoïdale
dans les encoches. Les trois enroulements statoriques et rotoriques, sont supposés identiques.
Nous supposons que l’épaisseur de l’entrefer est uniforme ce qui conduit à une
perméance d’entrefer constante.
Nous négligeons la saturation du circuit magnétique ainsi que son hystérésis, ce qui
permet de définir des inductances constantes.
Nous supposons que l’induction dans l’entrefer est à répartition sinusoïdale.
Nous supposons que la composante homopolaire du courant est nulle.
Nous tenons compte des fondamentaux des grandeurs alternatives seulement.
Nous ne tenons compte que des pertes joules dans la machine.
Nous négligeons les pertes fer.
Nous adoptons la convention « récepteur » pour les deux enroulements.
II.2.2 Mise en équations
La MADA est représentée sur la figure (II.1) par ces six enroulements dans l’espace
électrique. SA SB SC sont les enroulements statoriques et RA RB RC les enroulements
rotoriques. L’angle θ repère de décalage de l’axe de la phase rotorique (OR) par rapport à
l’axe fixe de la phase statorique (OS).
Nous supposons que le stator et le rotor de la machine sont alimentés par un système de
tensions sinusoïdales triphasé direct de pulsation et d’amplitude pour le stator
et et pour le rotor. Les enroulements de la machine vont être parcourus par un système de courants triphasé
direct de même pulsation que les tensions et d’amplitudes respectives et . Nous voyons un
déphasage Ψ, respectivement Ψ, entre le courant et la tension d’une même phase au stator,
respectivement au rotor.
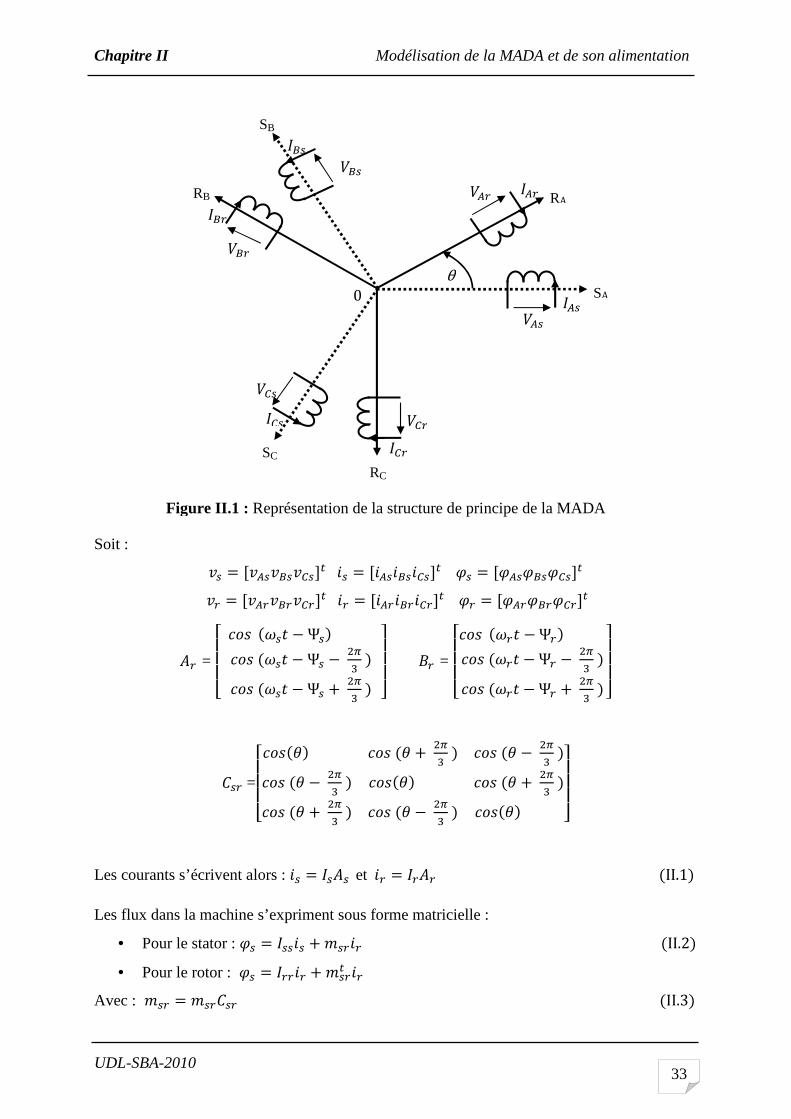
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 33
Soit :
=
Ψ Ψ Ψ ! "##
#$ % =
Ψ Ψ Ψ ! "##
#$
& =
' ' ! ' ' ' ' ! ' ! ' ' "#
##$
Les courants s’écrivent alors : et II.1 Les flux dans la machine s’expriment sous forme matricielle :
• Pour le stator : ! + II.2
• Pour le rotor : ! +
Avec : + +& II.3
0 θ
RC
RB RA
SC
SB
SA
Figure II.1 : Représentation de la structure de principe de la MADA
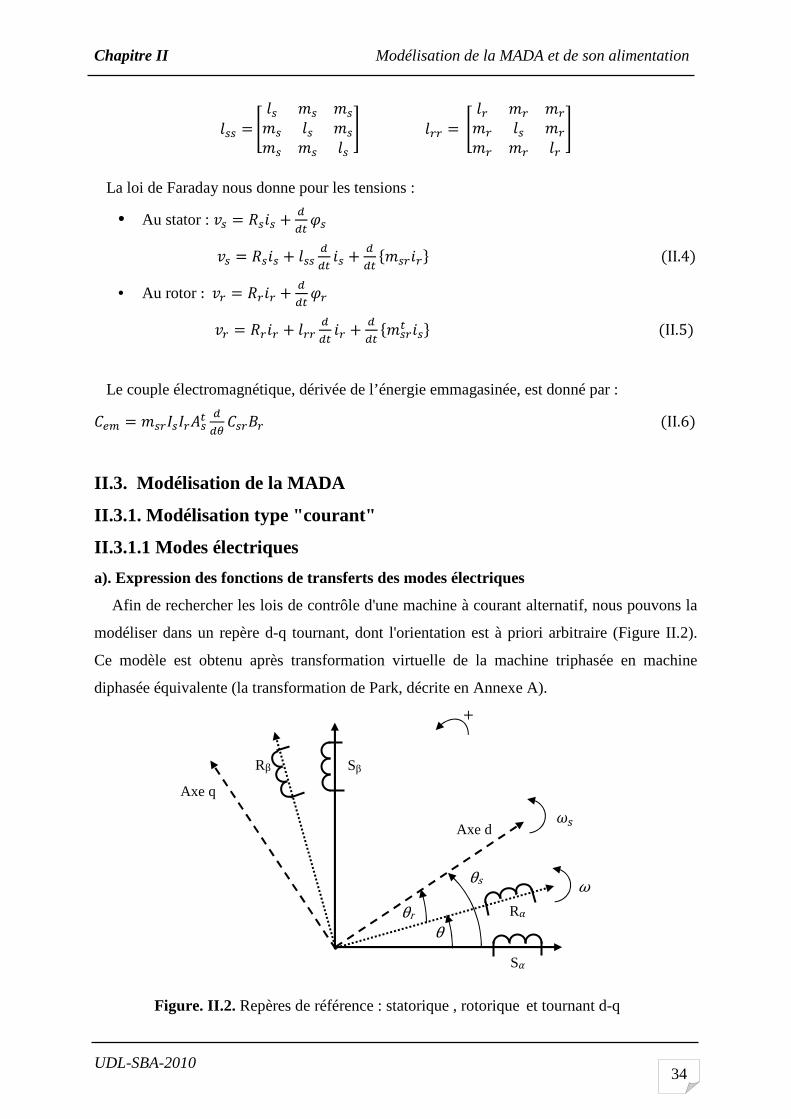
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 34
0 1 0 + ++ 0 ++ + 02 0 1 0 + ++ 0 ++ + 0
2 La loi de Faraday nous donne pour les tensions :
• Au stator : 3 ! 44
3 ! 0 44 ! 44 5+6 II.4
• Au rotor : 3 !4
4
3 ! 04
4 !
4
45+
6 (II.5)
Le couple électromagnétique, dérivée de l’énergie emmagasinée, est donné par :
&:; + 4
4<&% (II.6)
II.3. Modélisation de la MADA
II.3.1. Modélisation type "courant"
II.3.1.1 Modes électriques
a). Expression des fonctions de transferts des modes électriques
Afin de rechercher les lois de contrôle d'une machine à courant alternatif, nous pouvons la
modéliser dans un repère d-q tournant, dont l'orientation est à priori arbitraire (Figure II.2).
Ce modèle est obtenu après transformation virtuelle de la machine triphasée en machine
diphasée équivalente (la transformation de Park, décrite en Annexe A).
θ
θr
θs
Axe q
Rβ Sβ
Axe d
RA
SA
ω
+
Figure. II.2. Repères de référence : statorique , rotorique et tournant d-q

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 35
Dans ce repère, SA-Sβ sont les enroulements diphasées équivalents statoriques et RA-Rβ les
enroulements diphasées équivalents rotoriques. Dans les repères "fixes" (SA-Sβ et RA-Rβ)
toutes les variables du modèle sont alternatives, alors que dans le repère tournant d-q, elles
sont constantes. Les enroulements statoriques sont stationnaires, alors que les enroulements
rotoriques sont repères par un angle variable '. Il représente la position angulaire électrique
du rotor par rapport à l'armature du stator. La relation angulaire suivante est définie: ' ' ! ' II.7
' est la position angulaire relative de l'axe d du repère tournant d-q par rapport à la bobine
diphasée équivalente du stator notée Sa. ' est la position angulaire relative de l'axe d du
repère tournant par rapport à la bobine diphasée équivalente du rotor notée Ra.
Les vitesses angulaires de rotation sont obtenues telles que :
DEFEG H'H H'H !
I II. 8
En appliquant la transformation de Park et en tenant compte des hypothèses simplificatrices
nous pouvons établir les expressions des tensions statoriques et rotoriques dans le repère
tournant d-q quelconque :
DEEEFEEEG4 3 4 ! H4H H'H K
K 3 K ! HKH ! H'H 44 3 4 ! H4H H'H KK 3 K ! HKH ! H'H 4
I II. 9
Nous devons tenir compte des équations liant les différents courants (M ; M ; i P (d; q))
aux flux (M ; M; i P (d; q)) statoriques et rotoriques qui interagissent dans la machine :
DEFEG4 Q 4 ! R 4K Q K ! R K4 Q 4 ! R 4K Q K ! R K
II. 10) I

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 36
Dans ces expressions, RS et Rr sont les résistances statoriques et rotoriques. Q et Q, sont
les inductances cycliques statorique et rotorique propres et R, la mutuelle inductance
(inductance de réciprocité).
Si maintenant, nous exprimons les équations générales (Eq.II.9) en utilisant la
transformation de Laplace ainsi que la relation angulaire définie par la formule (II.7) et la
relation de liaison des pulsations (Eq.II.8), le système d'équations suivant est obtenu :
DEFEG4U 3 4U ! UV4U VKUKU 3 KU ! UVKU ! V4U4U 3 4U ! UV4U VKUKU 3 KU ! UVKU ! V4U
I II. 11)
Nous définissons des tensions intermédiaires telles que :
DEEEFEEEG4 RQ 4 4W éY
K RQ K KW éY4 RQ 4 4W éYK RQ K KW éY
I II. 12)
Des termes de couplage à compenser apparaissent ZW4 , ZWK , Z4 , ZK. Ces expressions
particulières, nous permettent d'obtenir des relations directes entre les tensions intermédiaires
et les courants statoriques et rotoriques dans les axes d ou q. Il vient :
DEFEG4W éY 31 ! U\ ]4 ! ZW4KW éY 31 ! U\ ]K ! ZWK4W éY 31 ! U\ ]4 ! Z4KW éY 31 ! U\ ]K ! ZK
I II. 13
Où \ Q3 est la constante de temps électrique statorique, \^ _` est la constante de temps
électrique rotorique et ] 1 abcd_ _ est le coefficient de dispersion. Dans ce cas les termes
de couplage peuvent être exprimés :

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 37
DEEEFEEEG Z4 RQ 3 4 VK ! RQ VK
ZK RQ 3 K ! V4 RQ V4Z4 RQ 3 4 ! RQ VK VKZK RQ 3 K RQ V4 ! V4
I II. 14)
Les termes de couplage sont associés à chaque axe de chaque coté de la machine. Ces
expressions contiennent des termes témoignant de l'interaction entre les axes et les cotés de la
machine. Ainsi, dans le terme Z4 associé au courant statorique direct 4, interviennent, le
courant direct rotorique 4 et des termes liés aux flux statoriques et rotoriques de l'axe en
quadrature VK ; VK. Remarquons la présence des pulsations précédemment définies par
l'équation (II.8).
Des fonctions de transfert peuvent être définies. Elles sont communes par côté de la
machine. C'est à dire que l'on utilisera la même fonction de transfert pour traiter l'axe direct d
et l'axe en quadrature q. Ces transmittances mettent en jeu des tensions en fonction des
courants directs et en quadrature telles que :
DFG\eU MW éY ZMM MW éYWM
\eU MW éY ZMM MW éYWMI P d; q II. 15)
Elles sont de type premier ordre :
DEFEG\eU
131 ! U\ ]\eU
131 ! U\ ]I II. 16
Le gain est W et la constante de temps est σ Ts pour le stator et le gain est
W et la constante
de temps est σ Tr pour le rotor.
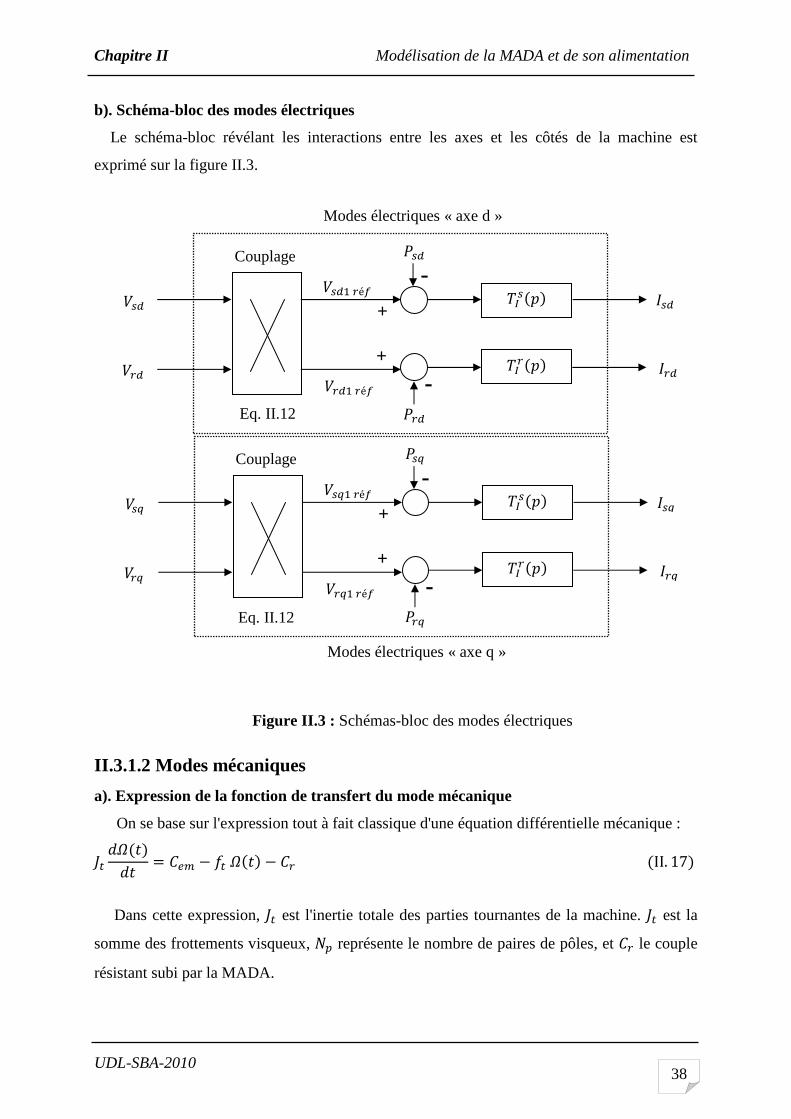
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 38
b). Schéma-bloc des modes électriques
Le schéma-bloc révélant les interactions entre les axes et les côtés de la machine est
exprimé sur la figure II.3.
II.3.1.2 Modes mécaniques
a). Expression de la fonction de transfert du mode mécanique
On se base sur l'expression tout à fait classique d'une équation différentielle mécanique :
i HjH &:; k j & II. 17
Dans cette expression, i est l'inertie totale des parties tournantes de la machine. i est la
somme des frottements visqueux, lm représente le nombre de paires de pôles, et & le couple
résistant subi par la MADA.
Modes électriques « axe d »
Modes électriques « axe q »
4
4
Couplage
4W éY +
4W éY +
- Z4
- Z4
4
4 \eU
\eU
K
K
Couplage
KW éY +
KW éY +
- ZK
- ZK
K
K \eU
\eU
Figure II.3 : Schémas-bloc des modes électriques
Eq. II.12
Eq. II.12
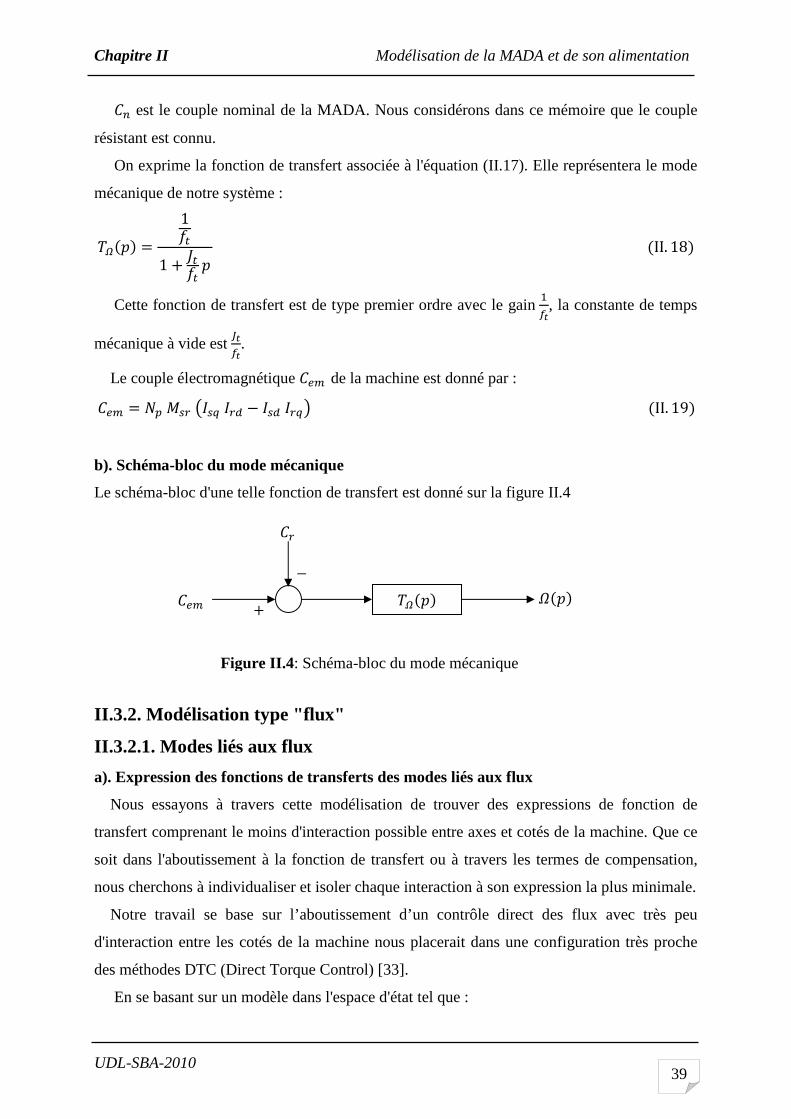
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 39
&n est le couple nominal de la MADA. Nous considérons dans ce mémoire que le couple
résistant est connu.
On exprime la fonction de transfert associée à l'équation (II.17). Elle représentera le mode
mécanique de notre système :
\oU 1k1 ! ik U II. 18
Cette fonction de transfert est de type premier ordre avec le gain WYp, la constante de temps
mécanique à vide est qpYp. Le couple électromagnétique &:; de la machine est donné par : &:; lm R rK 4 4 Ks II. 19
b). Schéma-bloc du mode mécanique
Le schéma-bloc d'une telle fonction de transfert est donné sur la figure II.4
II.3.2. Modélisation type "flux"
II.3.2.1. Modes liés aux flux
a). Expression des fonctions de transferts des modes liés aux flux
Nous essayons à travers cette modélisation de trouver des expressions de fonction de
transfert comprenant le moins d'interaction possible entre axes et cotés de la machine. Que ce
soit dans l'aboutissement à la fonction de transfert ou à travers les termes de compensation,
nous cherchons à individualiser et isoler chaque interaction à son expression la plus minimale.
Notre travail se base sur l’aboutissement d’un contrôle direct des flux avec très peu
d'interaction entre les cotés de la machine nous placerait dans une configuration très proche
des méthodes DTC (Direct Torque Control) [33].
En se basant sur un modèle dans l'espace d'état tel que :
! &:;
&
jU \oU
Figure II.4 : Schéma-bloc du mode mécanique
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 40
UtU tU ! %uU ! ZU . 20v
wU &tU . 20x Le vecteur d'état de flux est constitué des différentes composantes, soit :
t yzV4VKV4VK |
~ t HtH UtU . 21
L'expression du vecteur de commande s'écrit de la façon suivante :
u yz4K4K |
~ . 22
Dans cette expression, contrairement à la première modélisation, on ne trouve plus de
tensions intermédiaires. Le vecteur de commande est constitué des tensions diphasées
"directe" et en "quadrature".
Le choix du vecteur de commande et du vecteur d'état, (Eq. II.21) (Eq. II.22), nous permet
d'introduire un vecteur "terme de couplage" :
Z yzZ4ZKZ4ZK |
~ yzzzzz
3 RQ Q ] V4 ! VK 3 RQ Q ] VK V4 3 RQ Q ] V4 ! VK 3 RQ Q ] VK V4 |~ . 23
Les composantes du vecteur de couplage, qui devront être compensées, contiennent un
terme de moins que ceux introduits par la modélisation de type "courant" (Eq. II.14). Dans ces
composantes, on notera l'occurrence d'un terme lié au côté opposé de la machine, et d'un
terme lié à l'autre axe du même côté. Prenons par exemple la première composante ZW4, son
action concerne le flux stator dans l'axe d, V4. Le terme V4 représente l'influence de l'axe
direct rotorique sur ce flux, alors que le terme VK représente l'influence de l'axe opposé
statorique, soit l'influence de l'axe en quadrature sur l'axe direct. On peut traduire cela par

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 41
l'influence de l'axe "actif", maîtrisant le couple, sur l'axe "magnétisant", garant de l'état
magnétique de la machine.
Les différentes matrices sont alors déduites. La matrice dynamique A est :
yz 3Q ]000
0 3Q ]00
00 3Q ]0
000 3Q ]|
~ . 24
Cette matrice dynamique est diagonale. Il est facile d'en déduire qu'il n'y aura aucune
interaction directe entre les différents axes des différents côtes. C'est à dire qu'il n'y a pas de
terme de couplage direct entre les différentes variables. La matrice de commande %, est égale
à la matrice identité :
% 1000 0100 0010 0001 . 25 Le vecteur de sortie w, est donné par la matrice C, (Eq. II.20.b), que l'on choisira de façon à
formuler le flux désiré. Par exemple, si nous désirons obtenir le flux statorique direct, V4,
elle s'exprime : & 1 0 0 0 . 26
On écrit les fonctions de transfert découlant de cette modélisation :
DFG\U MW éY ZMVM\U MW éY ZMVM
I P d; q II. 27
Ces fonctions de transferts lient les tensions directes aux flux stator et rotor :
DEEFEEG\U Q ]3U Q ]3 ! 1
\U Q ]3U Q ]3 ! 1I II. 28
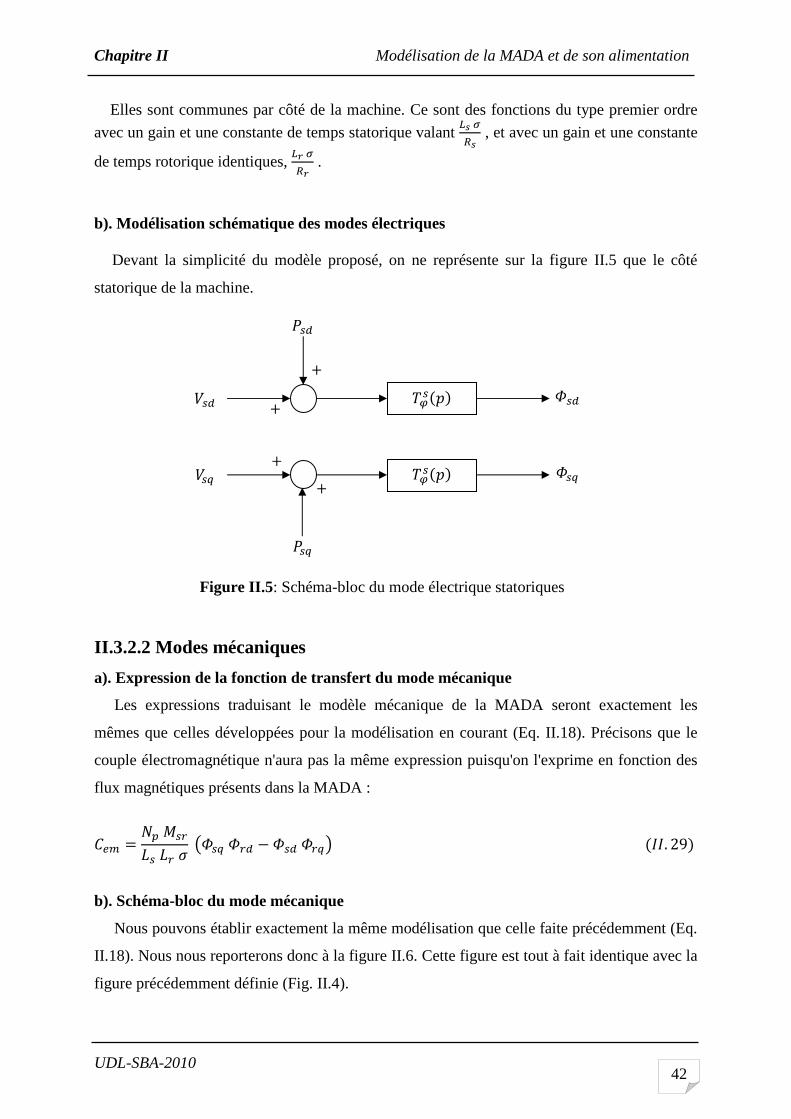
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 42
Elles sont communes par côté de la machine. Ce sont des fonctions du type premier ordre
avec un gain et une constante de temps statorique valant _b `b , et avec un gain et une constante
de temps rotorique identiques, _c `c .
b). Modélisation schématique des modes électriques Devant la simplicité du modèle proposé, on ne représente sur la figure II.5 que le côté
statorique de la machine.
II.3.2.2 Modes mécaniques
a). Expression de la fonction de transfert du mode mécanique
Les expressions traduisant le modèle mécanique de la MADA seront exactement les
mêmes que celles développées pour la modélisation en courant (Eq. II.18). Précisons que le
couple électromagnétique n'aura pas la même expression puisqu'on l'exprime en fonction des
flux magnétiques présents dans la MADA :
&:; lm RQ Q ] rVK V4 V4 VKs . 29
b). Schéma-bloc du mode mécanique
Nous pouvons établir exactement la même modélisation que celle faite précédemment (Eq.
II.18). Nous nous reporterons donc à la figure II.6. Cette figure est tout à fait identique avec la
figure précédemment définie (Fig. II.4).
Figure II.5 : Schéma-bloc du mode électrique statoriques
!
! 4
H
Z4
V4 \U
!
! K
ZK
VK \U
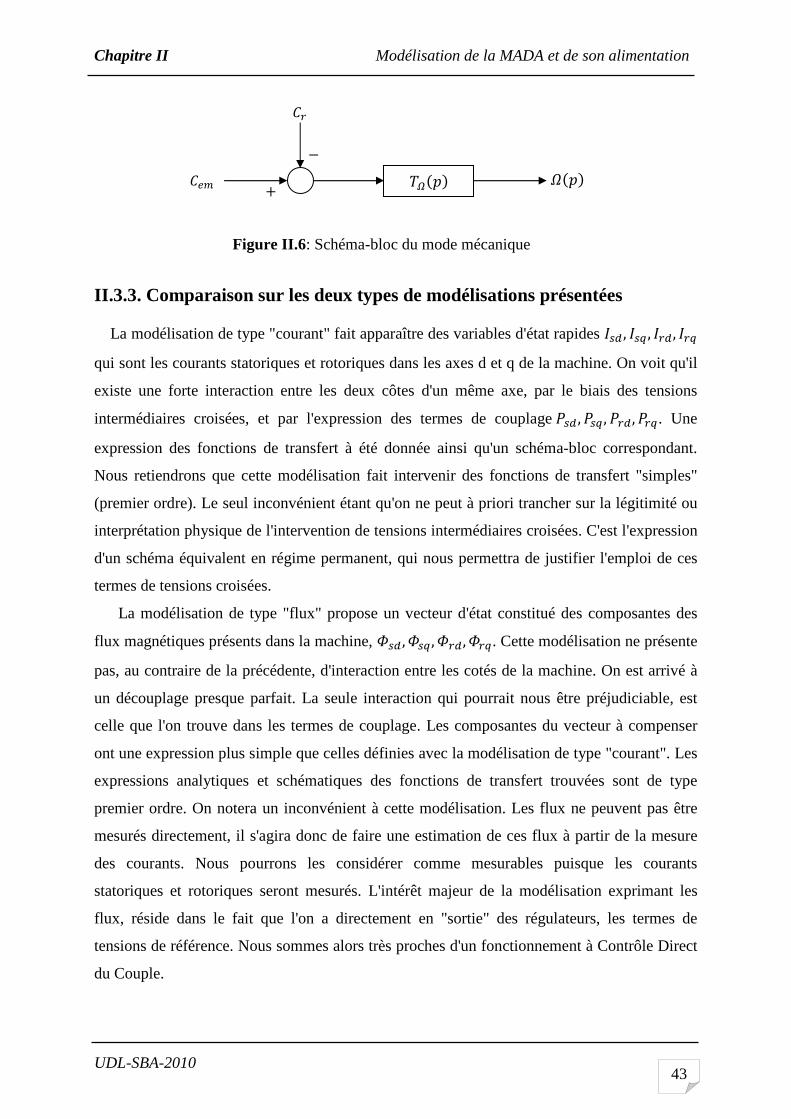
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 43
II.3.3. Comparaison sur les deux types de modélisations présentées La modélisation de type "courant" fait apparaître des variables d'état rapides 4 , K , 4, K
qui sont les courants statoriques et rotoriques dans les axes d et q de la machine. On voit qu'il
existe une forte interaction entre les deux côtes d'un même axe, par le biais des tensions
intermédiaires croisées, et par l'expression des termes de couplage Z4 , ZK , Z4, ZK. Une
expression des fonctions de transfert à été donnée ainsi qu'un schéma-bloc correspondant.
Nous retiendrons que cette modélisation fait intervenir des fonctions de transfert "simples"
(premier ordre). Le seul inconvénient étant qu'on ne peut à priori trancher sur la légitimité ou
interprétation physique de l'intervention de tensions intermédiaires croisées. C'est l'expression
d'un schéma équivalent en régime permanent, qui nous permettra de justifier l'emploi de ces
termes de tensions croisées.
La modélisation de type "flux" propose un vecteur d'état constitué des composantes des
flux magnétiques présents dans la machine, V4 , VK , V4, VK. Cette modélisation ne présente
pas, au contraire de la précédente, d'interaction entre les cotés de la machine. On est arrivé à
un découplage presque parfait. La seule interaction qui pourrait nous être préjudiciable, est
celle que l'on trouve dans les termes de couplage. Les composantes du vecteur à compenser
ont une expression plus simple que celles définies avec la modélisation de type "courant". Les
expressions analytiques et schématiques des fonctions de transfert trouvées sont de type
premier ordre. On notera un inconvénient à cette modélisation. Les flux ne peuvent pas être
mesurés directement, il s'agira donc de faire une estimation de ces flux à partir de la mesure
des courants. Nous pourrons les considérer comme mesurables puisque les courants
statoriques et rotoriques seront mesurés. L'intérêt majeur de la modélisation exprimant les
flux, réside dans le fait que l'on a directement en "sortie" des régulateurs, les termes de
tensions de référence. Nous sommes alors très proches d'un fonctionnement à Contrôle Direct
du Couple.
! &:;
&
jU \oU
Figure II.6 : Schéma-bloc du mode mécanique
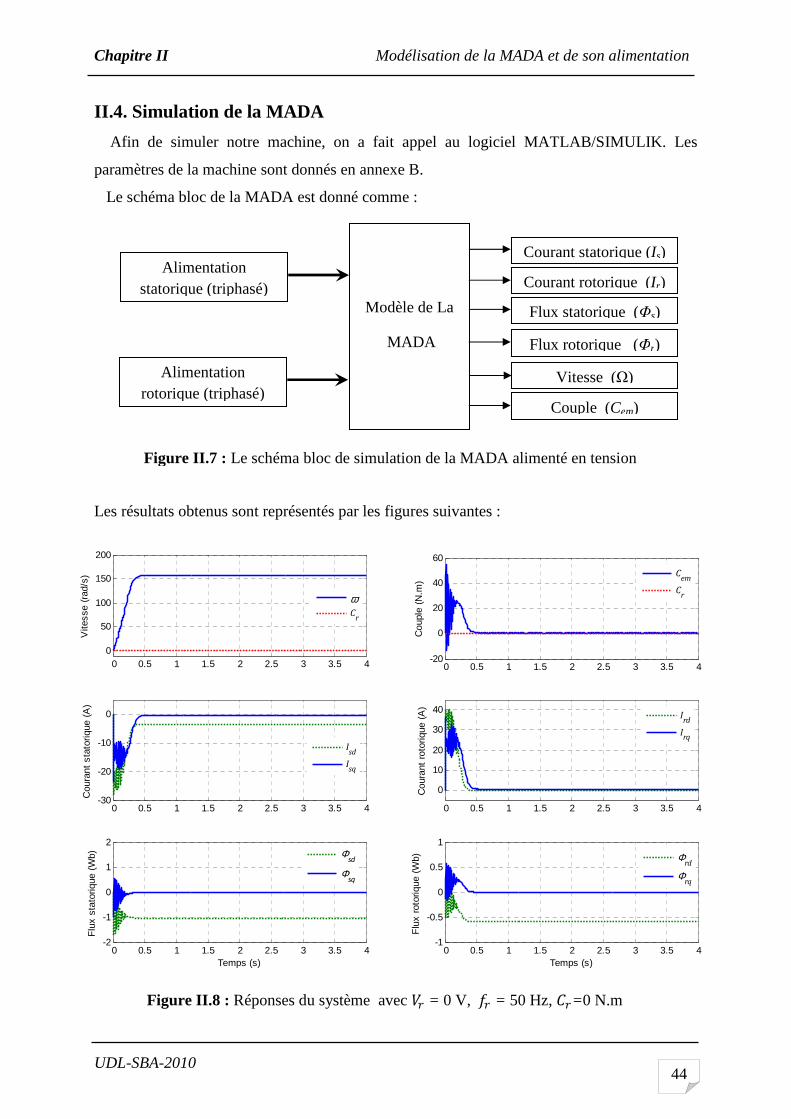
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 44
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-1
-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
II.4. Simulation de la MADA
Afin de simuler notre machine, on a fait appel au logiciel MATLAB/SIMULIK. Les
paramètres de la machine sont donnés en annexe B.
Le schéma bloc de la MADA est donné comme :
Les résultats obtenus sont représentés par les figures suivantes :
Modèle de La
MADA
Alimentation statorique (triphasé)
Alimentation rotorique (triphasé)
Courant statorique (Is)
Courant rotorique (Ir)
Flux statorique (Φs)
Flux rotorique (Φr)
Vitesse (Ω)
Couple (Cem)
Figure II.7 : Le schéma bloc de simulation de la MADA alimenté en tension
Figure II.8 : Réponses du système avec = 0 V, k = 50 Hz, &=0 N.m
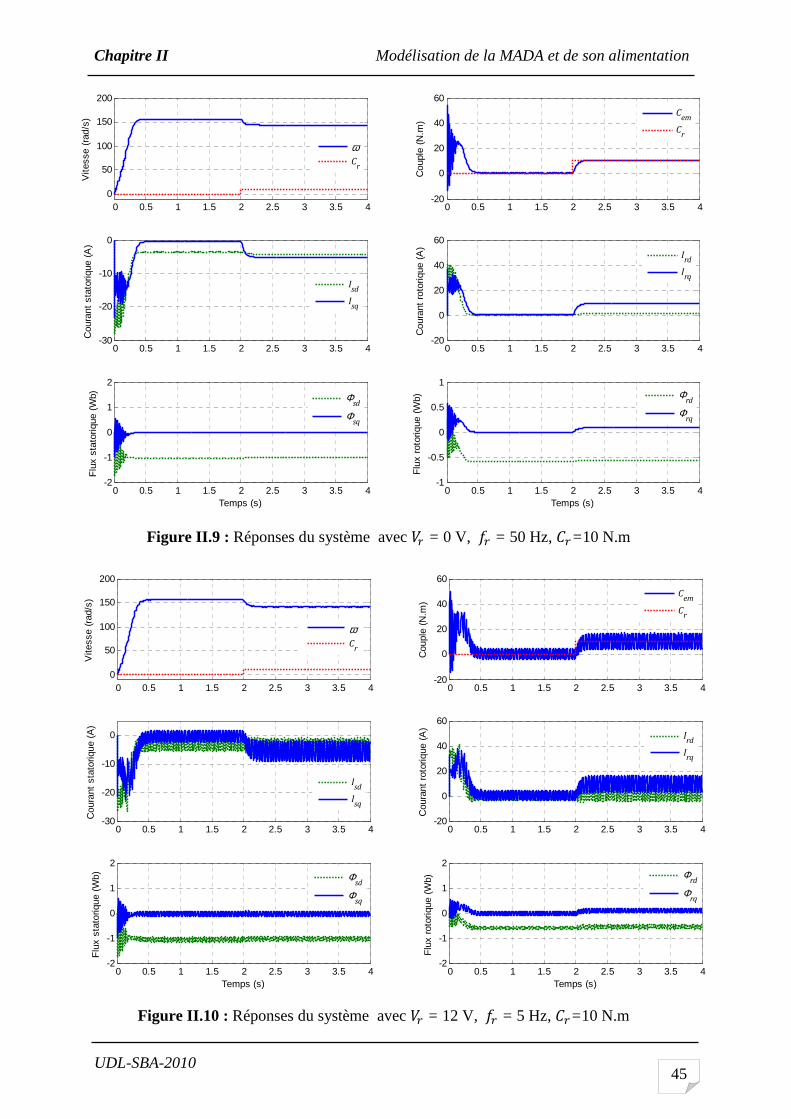
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 45
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200V
itess
e (r
ad/s
)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-1
-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Isd
Isq
Cem
Cr
Ird
Irq
Φsd
Φsq
Φrd
Φrq
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Cem
Cr
Ird
Irq
Isd
Isq
Φsd
Φsq
Φrd
Φrq
Figure II.10 : Réponses du système avec = 12 V, k = 5 Hz, &=10 N.m
Figure II.9 : Réponses du système avec = 0 V, k = 50 Hz, &=10 N.m
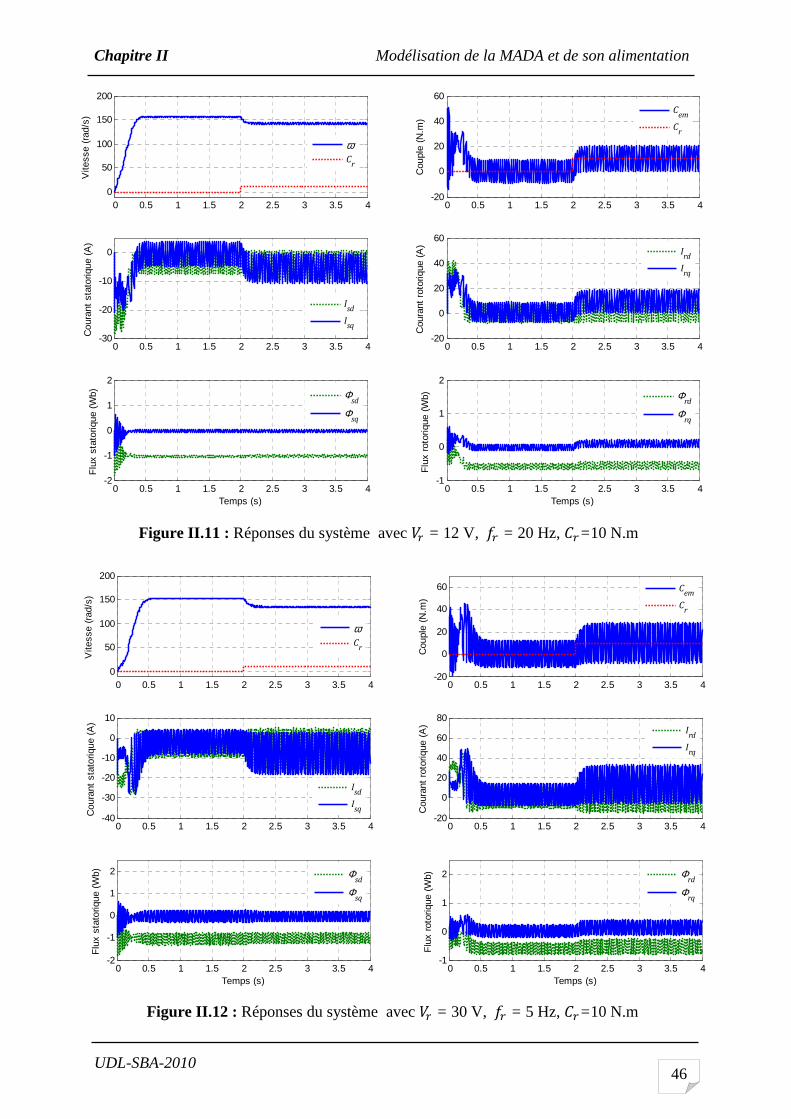
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 46
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200V
itess
e (r
ad/s
)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-1
0
1
2
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-40
-30
-20
-10
0
10
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
80
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-1
0
1
2
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
Figure II.12 : Réponses du système avec = 30 V, k = 5 Hz, &=10 N.m
Figure II.11 : Réponses du système avec = 12 V, k = 20 Hz, &=10 N.m
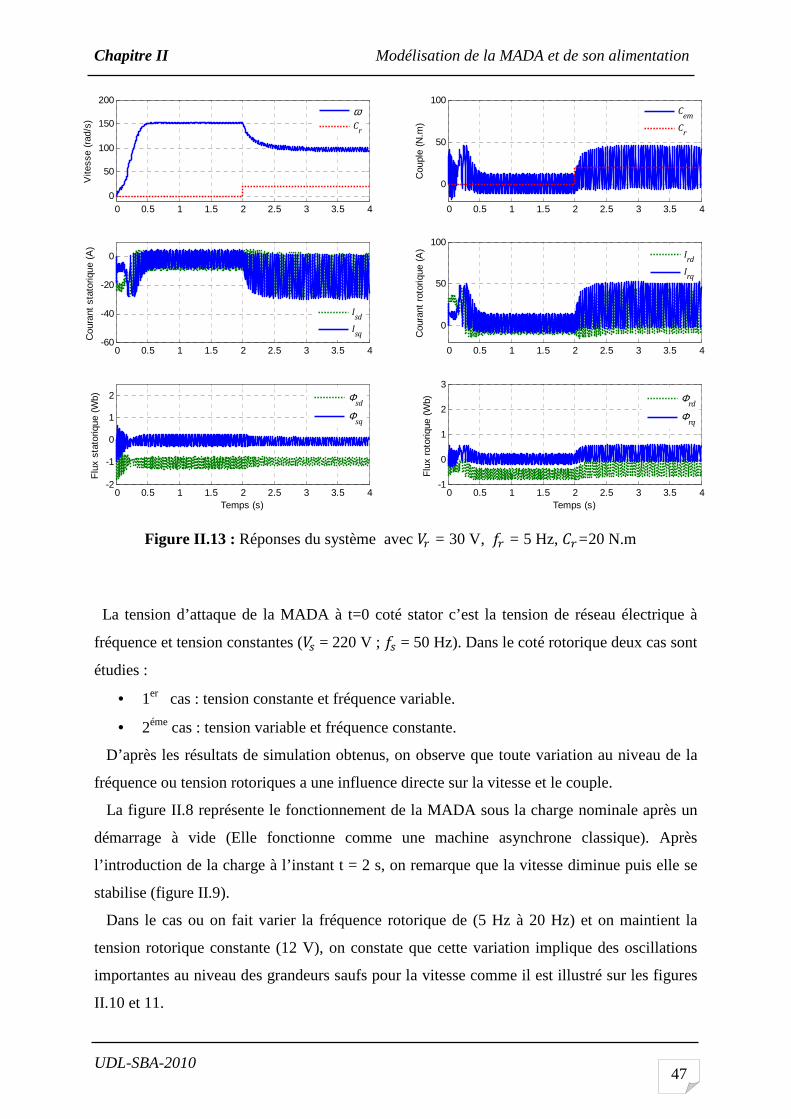
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 47
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200V
itess
e (r
ad/s
)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
50
100
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-60
-40
-20
0
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
50
100
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-1
0
1
2
3
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωC
r
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
La tension d’attaque de la MADA à t=0 coté stator c’est la tension de réseau électrique à
fréquence et tension constantes ( = 220 V ; k = 50 Hz). Dans le coté rotorique deux cas sont
étudies :
• 1er cas : tension constante et fréquence variable.
• 2éme cas : tension variable et fréquence constante.
D’après les résultats de simulation obtenus, on observe que toute variation au niveau de la
fréquence ou tension rotoriques a une influence directe sur la vitesse et le couple.
La figure II.8 représente le fonctionnement de la MADA sous la charge nominale après un
démarrage à vide (Elle fonctionne comme une machine asynchrone classique). Après
l’introduction de la charge à l’instant t = 2 s, on remarque que la vitesse diminue puis elle se
stabilise (figure II.9).
Dans le cas ou on fait varier la fréquence rotorique de (5 Hz à 20 Hz) et on maintient la
tension rotorique constante (12 V), on constate que cette variation implique des oscillations
importantes au niveau des grandeurs saufs pour la vitesse comme il est illustré sur les figures
II.10 et 11.
Figure II.13 : Réponses du système avec = 30 V, k = 5 Hz, &=20 N.m
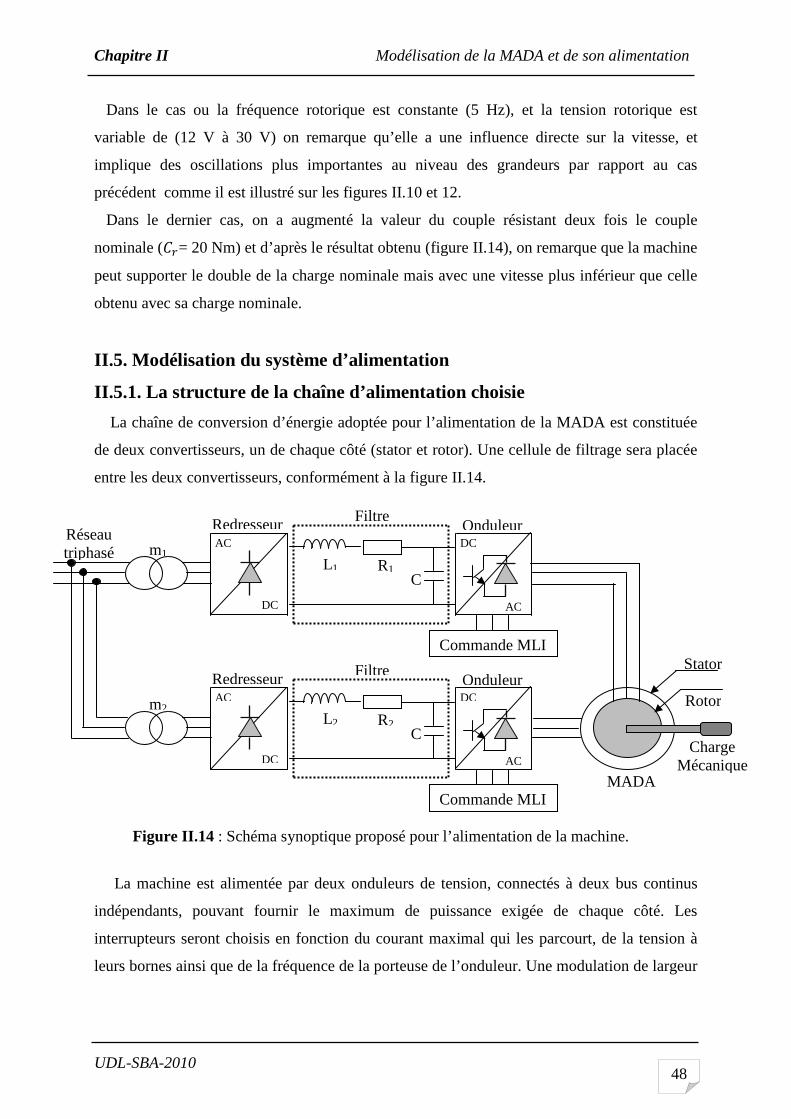
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 48
Dans le cas ou la fréquence rotorique est constante (5 Hz), et la tension rotorique est
variable de (12 V à 30 V) on remarque qu’elle a une influence directe sur la vitesse, et
implique des oscillations plus importantes au niveau des grandeurs par rapport au cas
précédent comme il est illustré sur les figures II.10 et 12.
Dans le dernier cas, on a augmenté la valeur du couple résistant deux fois le couple
nominale (&= 20 Nm) et d’après le résultat obtenu (figure II.14), on remarque que la machine
peut supporter le double de la charge nominale mais avec une vitesse plus inférieur que celle
obtenu avec sa charge nominale.
II.5. Modélisation du système d’alimentation
II.5.1. La structure de la chaîne d’alimentation choisie
La chaîne de conversion d’énergie adoptée pour l’alimentation de la MADA est constituée
de deux convertisseurs, un de chaque côté (stator et rotor). Une cellule de filtrage sera placée
entre les deux convertisseurs, conformément à la figure II.14.
La machine est alimentée par deux onduleurs de tension, connectés à deux bus continus
indépendants, pouvant fournir le maximum de puissance exigée de chaque côté. Les
interrupteurs seront choisis en fonction du courant maximal qui les parcourt, de la tension à
leurs bornes ainsi que de la fréquence de la porteuse de l’onduleur. Une modulation de largeur
Réseau triphasé
Charge Mécanique
MADA
m1
Filtre Onduleur Redresseur
L1 R1 C
AC
DC
DC
AC
Commande MLI
m2
Filtre Onduleur Redresseur
L2 R2 C
AC
DC
DC
AC
Commande MLI
Stator
Rotor
Figure II.14 : Schéma synoptique proposé pour l’alimentation de la machine.
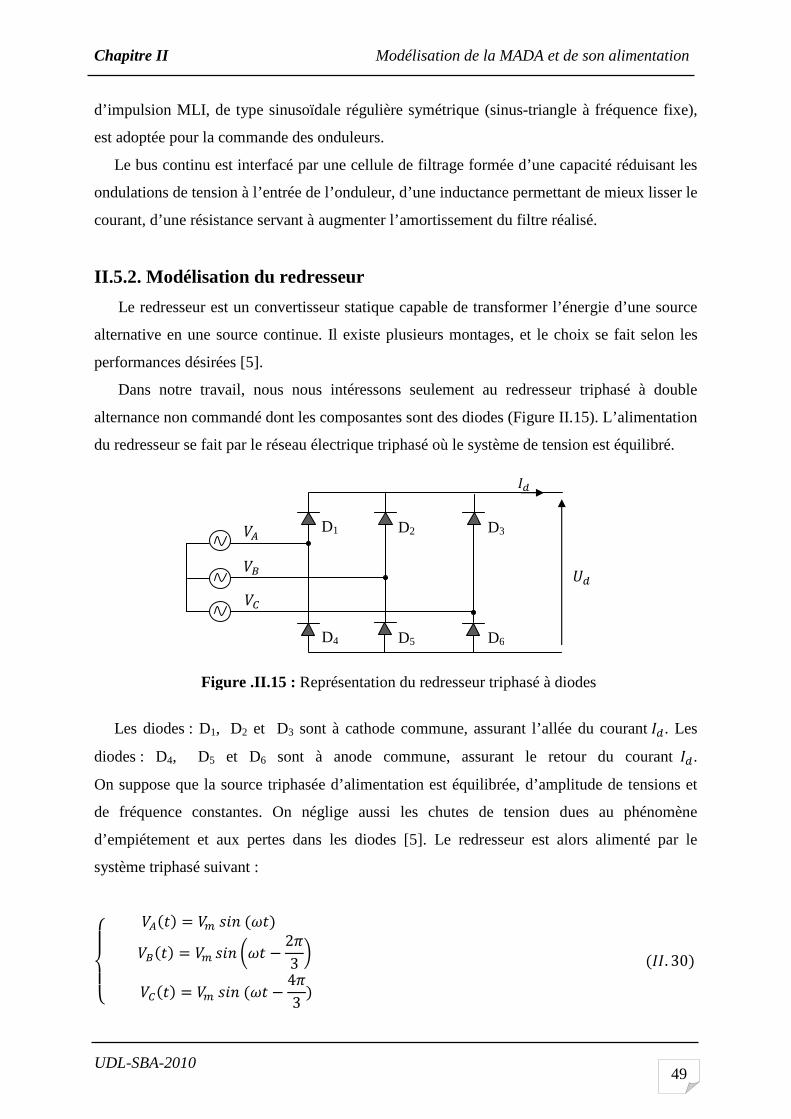
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 49
d’impulsion MLI, de type sinusoïdale régulière symétrique (sinus-triangle à fréquence fixe),
est adoptée pour la commande des onduleurs.
Le bus continu est interfacé par une cellule de filtrage formée d’une capacité réduisant les
ondulations de tension à l’entrée de l’onduleur, d’une inductance permettant de mieux lisser le
courant, d’une résistance servant à augmenter l’amortissement du filtre réalisé.
II.5.2. Modélisation du redresseur
Le redresseur est un convertisseur statique capable de transformer l’énergie d’une source
alternative en une source continue. Il existe plusieurs montages, et le choix se fait selon les
performances désirées [5].
Dans notre travail, nous nous intéressons seulement au redresseur triphasé à double
alternance non commandé dont les composantes sont des diodes (Figure II.15). L’alimentation
du redresseur se fait par le réseau électrique triphasé où le système de tension est équilibré.
Les diodes : D1, D2 et D3 sont à cathode commune, assurant l’allée du courant 4. Les
diodes : D4, D5 et D6 sont à anode commune, assurant le retour du courant 4.
On suppose que la source triphasée d’alimentation est équilibrée, d’amplitude de tensions et
de fréquence constantes. On néglige aussi les chutes de tension dues au phénomène
d’empiétement et aux pertes dans les diodes [5]. Le redresseur est alors alimenté par le
système triphasé suivant :
DEFEG ; ; 23
; 43 I . 30
Figure .II.15 : Représentation du redresseur triphasé à diodes
4
D1 D2 D3
D4 D5 D6
u4
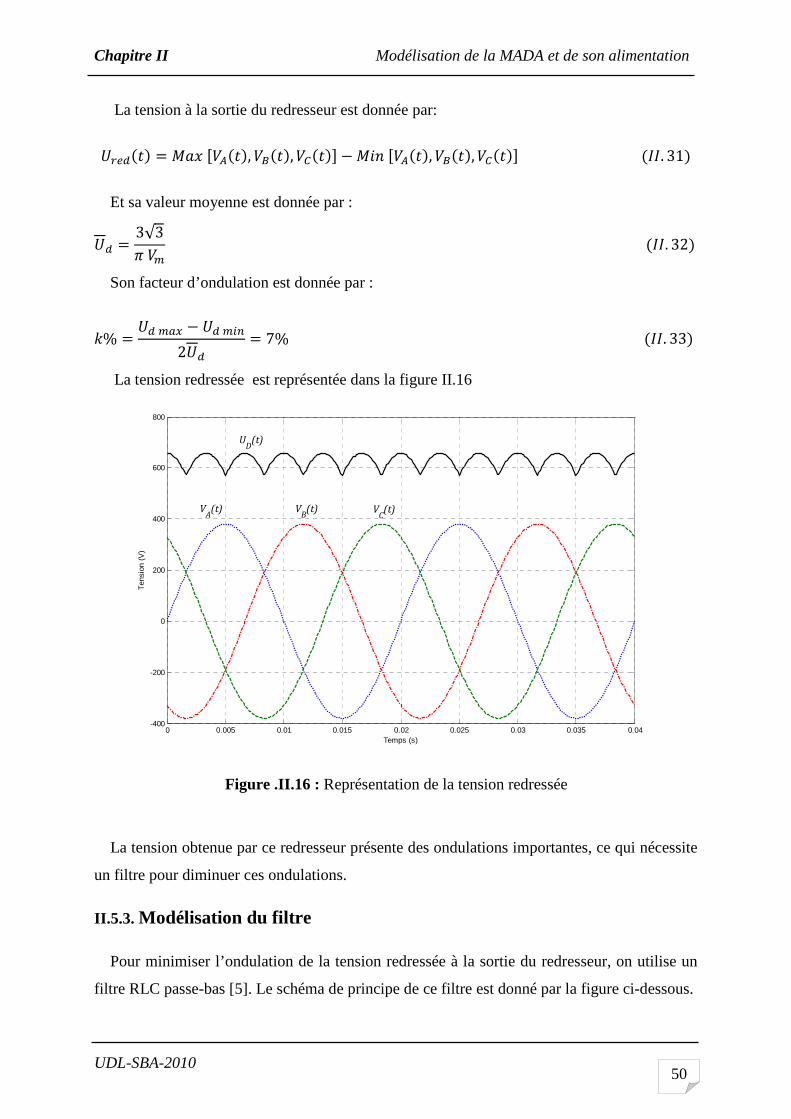
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 50
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04-400
-200
0
200
400
600
800
Temps (s)
Ten
sion
(V
)
UD
(t)
VA
(t) VB
(t) VC
(t)
La tension à la sortie du redresseur est donnée par:
u:4 Rv , , R , , . 31
Et sa valeur moyenne est donnée par :
u4 3√3 ; . 32
Son facteur d’ondulation est donnée par :
% u4 ; u4 ;Mn2u4 7% . 33
La tension redressée est représentée dans la figure II.16
La tension obtenue par ce redresseur présente des ondulations importantes, ce qui nécessite
un filtre pour diminuer ces ondulations.
II.5.3. Modélisation du filtre
Pour minimiser l’ondulation de la tension redressée à la sortie du redresseur, on utilise un
filtre RLC passe-bas [5]. Le schéma de principe de ce filtre est donné par la figure ci-dessous.
Figure .II.16 : Représentation de la tension redressée

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 51
- Le condensateur permet d’obtenir à l’entrée de l’onduleur une tension sensiblement
constante, et d’absorber le courant négatif restitué par la charge [35].
- L’inductance permet de rendre sensiblement le courant constant [35].
Les équations du filtre sont données par :
u4 Q H4H ! 3 4 ! u4 . 34
Hu4H 1& r4 s . 35
La fonction de transfert du filtre est donnée par :
u4u4 uYMé:u:4é:é 1Q. &. ! 3. &. ! 1 . 36
C’est un filtre de deuxième ordre dont la pulsation de coupure est [35] :
1√Q. & 2. . k . 37
k : est la fréquence de coupure du filtre
II.5.4. Modélisation de l’onduleur de tension
Un onduleur de tension est un convertisseur statique qui assure la transformation de la
tension d’une source continue en une tension alternative [35].
Il est constitué de cellules de commutation généralement à transistors ou à thyristors GTO
pour les grandes puissances. Il permet d’imposer à la machine des ondes à amplitudes et
fréquences variables à partir d’un réseau standard 220/380 V-50 Hz [35].
Le montage onduleur est constitué de six interrupteurs bidirectionnels, chaque interrupteur
est constitué d’un transistor (T) et d’une diode (D) montés en tête-bêche (Figure II.18). Les
Figure .II.17 : Filtre RLC passe-bas
u4
L R
C u4
4 I
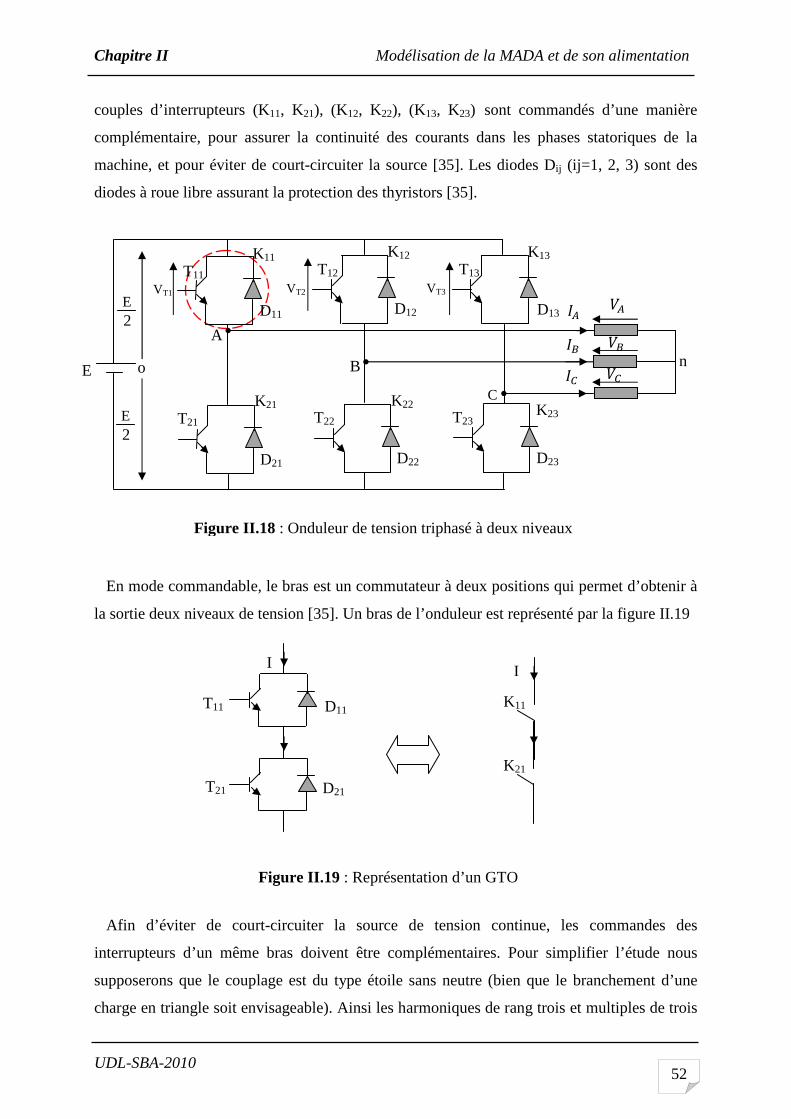
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 52
couples d’interrupteurs (K11, K21), (K12, K22), (K13, K23) sont commandés d’une manière
complémentaire, pour assurer la continuité des courants dans les phases statoriques de la
machine, et pour éviter de court-circuiter la source [35]. Les diodes Dij (ij=1, 2, 3) sont des
diodes à roue libre assurant la protection des thyristors [35].
En mode commandable, le bras est un commutateur à deux positions qui permet d’obtenir à
la sortie deux niveaux de tension [35]. Un bras de l’onduleur est représenté par la figure II.19
Afin d’éviter de court-circuiter la source de tension continue, les commandes des
interrupteurs d’un même bras doivent être complémentaires. Pour simplifier l’étude nous
supposerons que le couplage est du type étoile sans neutre (bien que le branchement d’une
charge en triangle soit envisageable). Ainsi les harmoniques de rang trois et multiples de trois
n E
E 2
E 2
T11 T12 T13
D11 D12 D13
T22 T21 T23
D21 D22 D23
o
A
B
C
VT1 VT2 VT3
K11 K12 K13
K21 K22 K23
Figure II.18 : Onduleur de tension triphasé à deux niveaux
Figure II.19 : Représentation d’un GTO
I
D11 T11
T21 D21
K11
I
K21

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 53
sont éliminées, et le système triphasé obtenu à la sortie de l’onduleur est un système triphasé
équilibré en tension ne contenant que les harmoniques impaires différentes de trois.
Pour obtenir une tension alternative à partir d’une tension continue, il faut découper la
tension d’entrée et l’appliquer à la charge tantôt dans un sens, tantôt dans l’autre sens.
L’onduleur alimenté par une source de tension parfaite impose à sa sortie, grâce au jeu
d’ouverture et de fermeture des interrupteurs, une tension alternative formée d’une succession
de créneaux rectangulaires, la période de fonctionnement étant fixée par la commande des
interrupteurs [46].
Les équations de tension simples appliquées aux trois phases sont :
! n ! n ! n I . 38
Par addition on a : ! ! ! ! ! 3n Sachant que le système des tensions triphasées statoriques est symétrique. Donc : ! ! ! 3n 0
D’où : n W ! ! . 39
On remplace (II.39) dans (II.38), on aura le système suivant :
DEFEG 23 13 13
13 ! 23 13 13 13 ! 23
I . 40
On peut écrire le système (II.40) sous la forme matricielle suivante :
1 2 13 1 2 1 11 2 11 1 22 . 1 2 . 41
Avec :
DEFEG W
I . 42
Tel que: W 1 WW k^+é W 1 1 W k^+é 1 1 W k^+é 1 I

Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 54
On remplace (II.42) dans (II.41), on aura le système suivant :
1 2 3 1 2 1 11 2 11 1 22 . 1W 2 . 43
Le système (II.43) représente le modèle mathématique de l'onduleur triphasé à MLI. Le
tableau ci-dessous montre les expressions qui prennent les tensions simples et les tensions
composées, en fonction de l'état ouvert ou fermé des interrupteurs W, , (les états de , , sont respectivement complémentaires de ceux de W, , ).
WW W W 2⁄ 2⁄ 2⁄ 0 0 0 0 0 0 0 2⁄ 2⁄ 2⁄ 3⁄ 2 3⁄ 3⁄ 0 0 2⁄ 2⁄ 2⁄ 3⁄ 3⁄ 2 3⁄ 0 0 0 2⁄ 2⁄ 2⁄ 2 3⁄ 3⁄ 3⁄ 0 0 2⁄ 2⁄ 2⁄ 2 3⁄ 3⁄ 3⁄ 0 0 0 2⁄ 2⁄ 2⁄ 3⁄ 3⁄ 2 3⁄ 0 0 0 2⁄ 2⁄ 2⁄ 3⁄ 2 3⁄ 3⁄ 0 0 0 0 2⁄ 2⁄ 2⁄ 0 0 0 0 0 0
II.5.5. Commande par modulation de largeur d’impulsion (MLI)
La modulation triangulo-sinusoïdale est appelée également modulation de largeur
d’impulsion intersective puisque son principe repose sur l’intersection d’une onde modulante
basse fréquence, dite tension de référence, généralement sinusoïdale, avec une onde porteuse
haute fréquence de forme, généralement, triangulaire, d’où l’appellation triangulo-sinusoïdale.
Le résultat de la comparaison de ces deux signaux sert à commander l’ouverture et la
fermeture des interrupteurs du circuit de puissance [54].
Deux paramètres caractérisent cette commande si la référence est sinusoïdale [54]:
• L’indice de modulation + qui définit le rapport entre la fréquence km de la porteuse et
la fréquence k de la référence : + km/k
• Le taux de modulation r (ou coefficient de réglage en tension ou encore rapport
cyclique) qui donne le rapport de l’amplitude de la modulante à la valeur crête m de
la porteuse: /m
Le schéma de principe est donné par la figure II.20.
Tableau II.1 : Etablissement des expressions des tensions simples et composées.
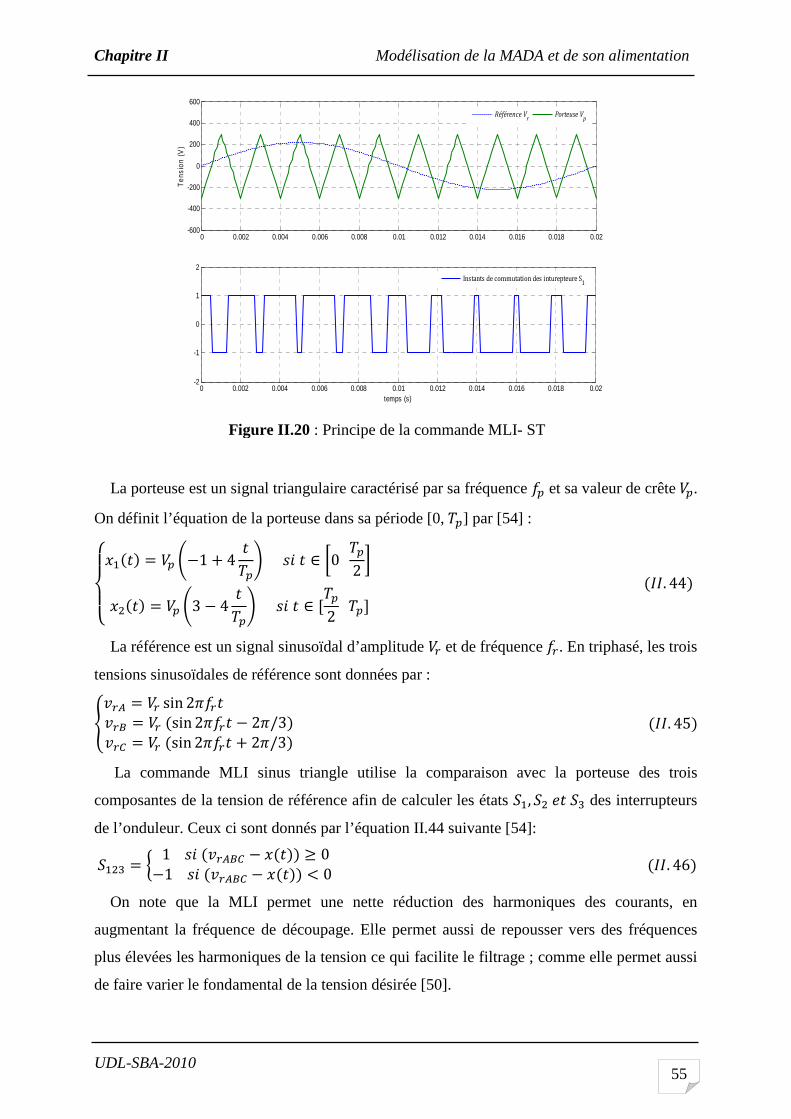
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 55
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-600
-400
-200
0
200
400
600
Ten
sion
(V
)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-2
-1
0
1
2
temps (s)
Référence Vr
Porteuse Vp
Instants de commutation des inturepteure S1
La porteuse est un signal triangulaire caractérisé par sa fréquence km et sa valeur de crête m.
On définit l’équation de la porteuse dans sa période [0, \m] par [54] :
DEFEGW m 1 ! 4 \m P ¡0 \m2 ¢
m 3 4 \m P \m2 \m I . 44
La référence est un signal sinusoïdal d’amplitude et de fréquence k. En triphasé, les trois
tensions sinusoïdales de référence sont données par :
sin 2k sin 2k 2/3 sin 2k ! 2/3
I . 45
La commande MLI sinus triangle utilise la comparaison avec la porteuse des trois
composantes de la tension de référence afin de calculer les états W, des interrupteurs
de l’onduleur. Ceux ci sont donnés par l’équation II.44 suivante [54]:
W ¤ 1 ¥ 01 ¦ 0I . 46
On note que la MLI permet une nette réduction des harmoniques des courants, en
augmentant la fréquence de découpage. Elle permet aussi de repousser vers des fréquences
plus élevées les harmoniques de la tension ce qui facilite le filtrage ; comme elle permet aussi
de faire varier le fondamental de la tension désirée [50].
Figure II.20 : Principe de la commande MLI- ST
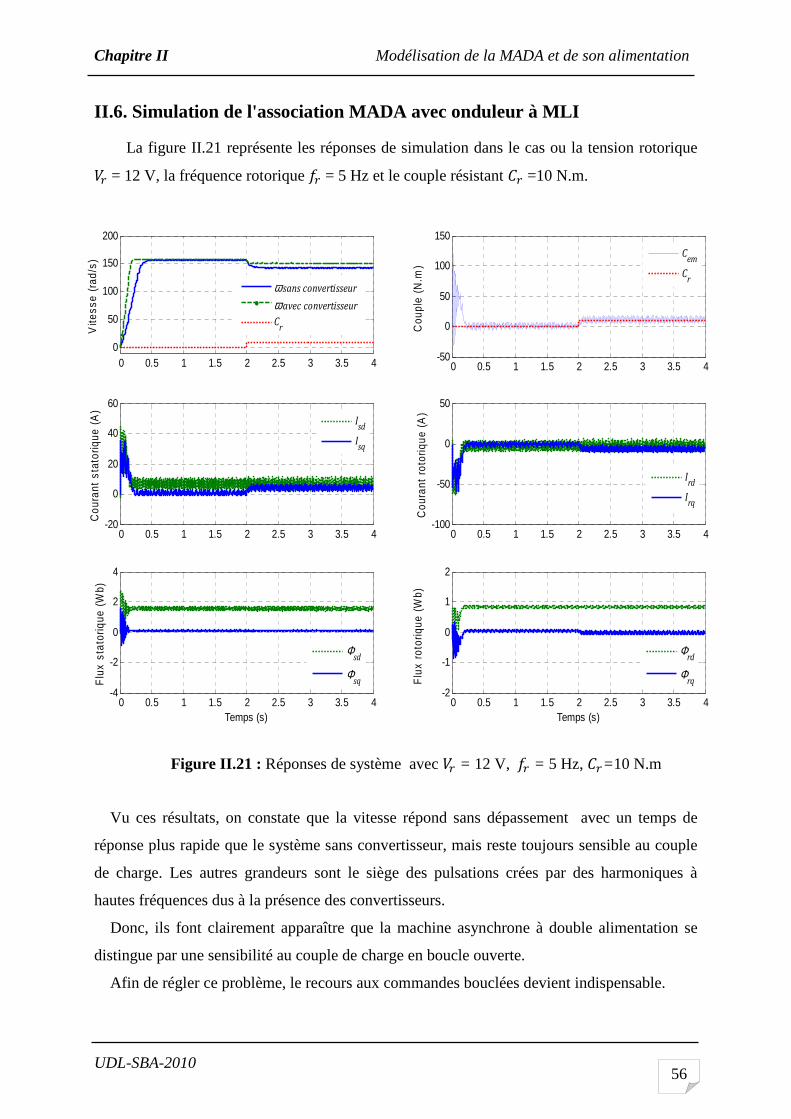
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 56
0 0.5 1 1.5 2 2.5 3 3.5 4-50
0
50
100
150
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
0
20
40
60
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-100
-50
0
50
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-4
-2
0
2
4
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-2
-1
0
1
2
Temps (s)
Flu
x ro
toriq
ue (
Wb)
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200
Vite
sse
(rad
/s)
ω sans convertisseur
ω avec convertisseur
Cr
Cem
Cr
Isd
Isq
Ird
Irq
Φrd
Φrq
Φsd
Φsq
II.6. Simulation de l'association MADA avec onduleur à MLI
La figure II.21 représente les réponses de simulation dans le cas ou la tension rotorique = 12 V, la fréquence rotorique k = 5 Hz et le couple résistant & =10 N.m.
Vu ces résultats, on constate que la vitesse répond sans dépassement avec un temps de
réponse plus rapide que le système sans convertisseur, mais reste toujours sensible au couple
de charge. Les autres grandeurs sont le siège des pulsations crées par des harmoniques à
hautes fréquences dus à la présence des convertisseurs.
Donc, ils font clairement apparaître que la machine asynchrone à double alimentation se
distingue par une sensibilité au couple de charge en boucle ouverte.
Afin de régler ce problème, le recours aux commandes bouclées devient indispensable.
Figure II.21 : Réponses de système avec = 12 V, k = 5 Hz, &=10 N.m
Chapitre II Modélisation de la MADA et de son alimentation
UDL-SBA-2010 57
II.7. Conclusion
Dans ce chapitre, nous avons présenté le modèle, en régime quelconque, de la machine
asynchrone à double alimentation dans le repère de Park lié au champ tournant. Ce modèle a
été développé dans le cadre de certaines hypothèses simplificatrices que nous devons
respecter. Lors de cette modélisation, nous nous sommes attachés à utiliser un modèle en vue
de la commande de la machine. Ensuite, on a modélisé le système d’alimentation qui
comporte le redresseur, le filtre et l’onduleur. Pour ce dernier, on a appliqué la technique de la
MLI pour le commander.
Comme nous avons pu le voir dans les résultats de simulation, la machine asynchrone à
double alimentation pose de sérieux problèmes de sensibilité à la charge en boucle ouverte,
dans ce cas, le recours aux commandes bouclées, et spécialement les commandes de type
vectoriel deviennent indispensables. Ainsi, le chapitre suivant sera consacré à la commande
vectorielle de la MADA, qui permet d’avoir un comportement dynamique similaire à celui
d’une machine à courant continu.
Chapitre III
Commande vectorielle de la
MADA avec
Découplage par Retour d’état
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 58
Chapitre III
Commande vectorielle de la MADA avec Découplage
par Retour d’état
III.1. Introduction
Actuellement, la machine asynchrone de par sa simplicité de construction, sa robustesse et
sont faible coût, elle détrône progressivement la machine à courant continue et concurrence
son homologue la machine synchrone. Seulement une association « convertisseur statique-
machine asynchrone » exige un procédé de contrôle efficace et performant. La commande à
haute performance d’une machine asynchrone est devenue très complexe, mais sa réalisation
ne pose plus de problème vu que les possibilités des techniques numériques modernes ouvrent
des perspectives de plus en plus compétitives tout en respectant l’aspect économique de cette
réalisation [48].
Depuis plusieurs années, des recherches universitaires et industrielles ont été réalisées pour
remédier le problème de commande de la machine asynchrone et établir une similitude avec la
machine à courant continu. En effet, la difficulté pour commander une machine asynchrone
réside dans le fait qu’il existe un couplage entre les variables d’entrées, de sorties et les
variables internes de la machine comme le flux, le couple et la vitesse. Les techniques de
commande classiques deviennent insuffisantes surtout dans les applications industrielles
réclamant un couple important en basse vitesse (traction, positionnement). Pour maitriser ces
difficultés et pour obtenir une situation équivalente à celle de la machine à courant continu,
Blaschke et Hasse ont proposé une technique de commande dite la commande vectorielle
(field oriented control) ou la commande par orientation du flux. Aujourd’hui, grâce à cette
technique de commande et au développement des systèmes numériques, plusieurs
entraînements à courant continu sont remplacés par des machines à courant alternatif, ce qui
permet un réglage de vitesse plus performant de point de vue rapidité et précision.
L’application de cette dernière à la machine asynchrone à double alimentation présente une
solution attractive pour réaliser des performances meilleures pour les applications de la
production d’énergie dans une gamme de vitesse limitée et constitue actuellement un
domaine de recherche [48].
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 59
Le but de ce chapitre est de présenter la technique de découplage par retour d’état de la
commande vectorielle appliquée à la MADA. Nous présenterons tout d'abord, le principe de
la commande à flux orienté et on applique le découplage par retour d’état par la suite. En fin
de chapitre, nous nous intéresserons à l’étude de la robustesse du système étudié vis-à-vis des
variations paramétriques de la machine.
III.2. But et principe de la commande vectorielle
Le but de la commande vectorielle est d'arriver à commander la machine asynchrone
comme une machine à courant continu à excitation indépendante où il y a un découplage
naturel entre la grandeur commandant le flux (le courant d'excitation) et celle liée au couple
(le courant d'induit). Ce découplage permet d'obtenir une réponse très rapide du couple, une
grande plage de commande de vitesse et une haute efficacité pour une grande plage de charge
en régime permanent.
Dans les applications nécessitant des performances dynamiques importantes, il faut pouvoir
agir directement sur le couple instantané. C’est facile pour la machine à courant continu, ou la
force magnétomotrice de l’induit établi un angle droit avec l’axe du flux inducteur, et ceci
quelque soit la vitesse de rotation, ainsi le couple est proportionnel au produit du flux
inducteur et du courant d’induit. Si la machine est excitée séparément, et l’on maintient le flux
inducteur constant, le couple est directement proportionnel au courant d’induit, on obtient
donc de bonnes performances dynamiques puisque le couple peut être contrôlé aussi
rapidement que le courant d’induit peut l’être. Par contre, dans une machine asynchrone,
l’angle entre le champ tournant du stator et celui du rotor varie avec la charge (différent de
90°), il en résulte des interactions complexes et des réponses dynamiques oscillatoires. Pour
obtenir une situation équivalente à celle de la machine à courant continu, on introduit la
technique de la commande vectorielle. L’idée proposée par Blaschke et Hasse c’est de
décomposer le vecteur des courants statoriques ou rotoriques en deux composantes, l’une
produit le flux, et l’autre produit le couple. Ce qui permet d’avoir un angle de 90° entre les
deux flux de la machine, et on obtient une caractéristique similaire à celle de la machine à
courant continu à excitation séparée [48].
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 60
III.3. Variantes de la commande vectorielle
La commande à flux orienté appliquée aux moteurs électriques est utilisée pour obtenir le
mode de fonctionnement recherché en positionnant d’une manière optimale les vecteurs
courants et les vecteurs flux résultants. De nombreuses variantes de ce principe de commande
ont été présentées dans la littérature, que l’on peut classifier [48]:
• Suivant la source d’énergie :
Commande en tension (Voltage Source Inverter)
Commande en courant (Current Controlled Inverter)
• Suivant les opérations désirées pour le flux : Commande vectorielle de flux rotorique
Commande vectorielle de flux statorique
Commande vectorielle de flux d’entrefer (ou de flux magnétisant)
• Suivant la détermination de la position du flux :
Directe par mesure ou observation du vecteur de flux (module, phase)
Indirecte par contrôle de la fréquence de glissement
III.4. Les types de la commande vectorielle
On distingue deux types de commande l’un est directe et l’autre est indirect.
La commande directe a été proposée par Blaschke. Dans ce cas, la connaissance du module
de flux et de sa phase est requise pour assurer un découplage entre le couple et le flux quelque
soit le régime transitoire effectué. En effet, le flux est régulé par une contre réaction, donc il
doit être mesuré ou estimé à partir des signaux de tensions statoriques et de courants. Afin
d’accéder à l’information concernant l’amplitude et la phase du flux, on peut utiliser des
capteurs (sondes à effet de Hall, spires de mesure) placés sous les dents du stator (entrefer de
la machine). L’avantage de cette technique est qu’elle dépend moins des variations
paramétriques. Cependant, l’inconvénient de cette méthode est que les capteurs sont
mécaniquement fragiles et ne peuvent pas travailler dans des conditions sévères telles que les
vibrations et les échauffements excessifs. De plus, les signaux captés sont entachés
d’harmoniques et leur fréquence varie avec la vitesse ce qui nécessite des filtres ajustables
automatiquement [48].
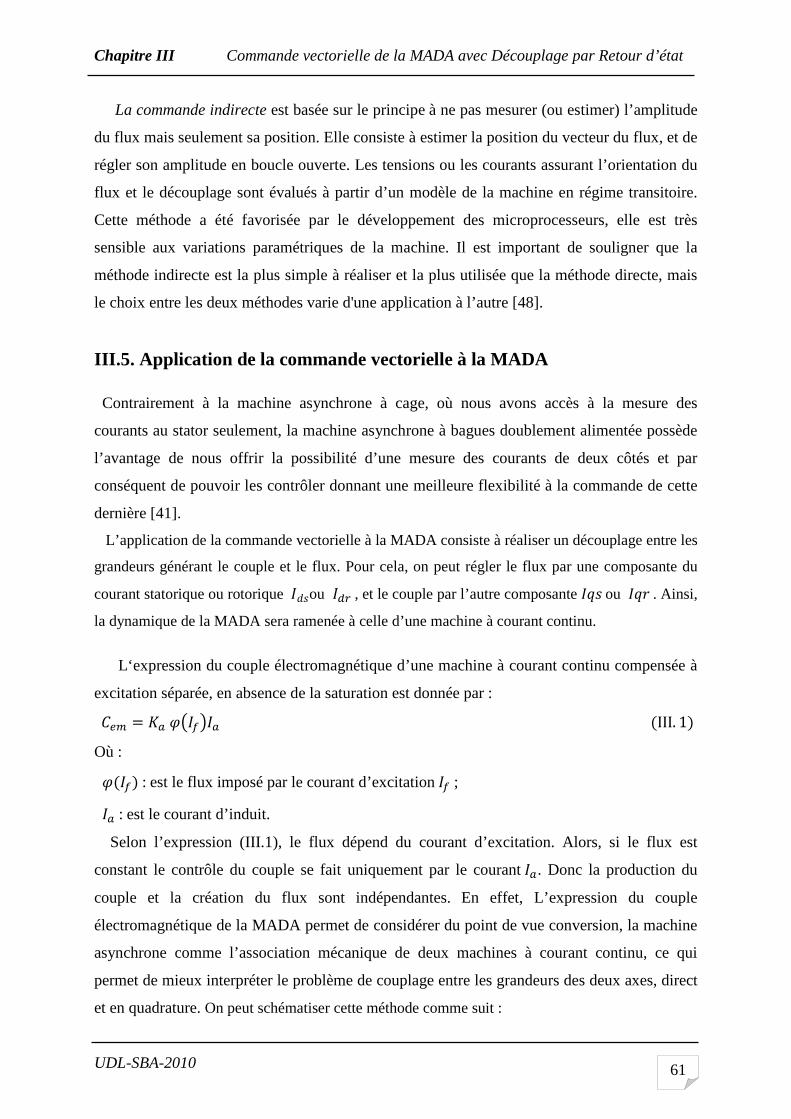
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 61
La commande indirecte est basée sur le principe à ne pas mesurer (ou estimer) l’amplitude
du flux mais seulement sa position. Elle consiste à estimer la position du vecteur du flux, et de
régler son amplitude en boucle ouverte. Les tensions ou les courants assurant l’orientation du
flux et le découplage sont évalués à partir d’un modèle de la machine en régime transitoire.
Cette méthode a été favorisée par le développement des microprocesseurs, elle est très
sensible aux variations paramétriques de la machine. Il est important de souligner que la
méthode indirecte est la plus simple à réaliser et la plus utilisée que la méthode directe, mais
le choix entre les deux méthodes varie d'une application à l’autre [48].
III.5. Application de la commande vectorielle à la MADA
Contrairement à la machine asynchrone à cage, où nous avons accès à la mesure des
courants au stator seulement, la machine asynchrone à bagues doublement alimentée possède
l’avantage de nous offrir la possibilité d’une mesure des courants de deux côtés et par
conséquent de pouvoir les contrôler donnant une meilleure flexibilité à la commande de cette
dernière [41].
L’application de la commande vectorielle à la MADA consiste à réaliser un découplage entre les
grandeurs générant le couple et le flux. Pour cela, on peut régler le flux par une composante du
courant statorique ou rotorique ou , et le couple par l’autre composante ou . Ainsi,
la dynamique de la MADA sera ramenée à celle d’une machine à courant continu.
L‘expression du couple électromagnétique d’une machine à courant continu compensée à
excitation séparée, en absence de la saturation est donnée par : III. 1
Où :
: est le flux imposé par le courant d’excitation ; : est le courant d’induit.
Selon l’expression (III.1), le flux dépend du courant d’excitation. Alors, si le flux est
constant le contrôle du couple se fait uniquement par le courant . Donc la production du
couple et la création du flux sont indépendantes. En effet, L’expression du couple
électromagnétique de la MADA permet de considérer du point de vue conversion, la machine
asynchrone comme l’association mécanique de deux machines à courant continu, ce qui
permet de mieux interpréter le problème de couplage entre les grandeurs des deux axes, direct
et en quadrature. On peut schématiser cette méthode comme suit :
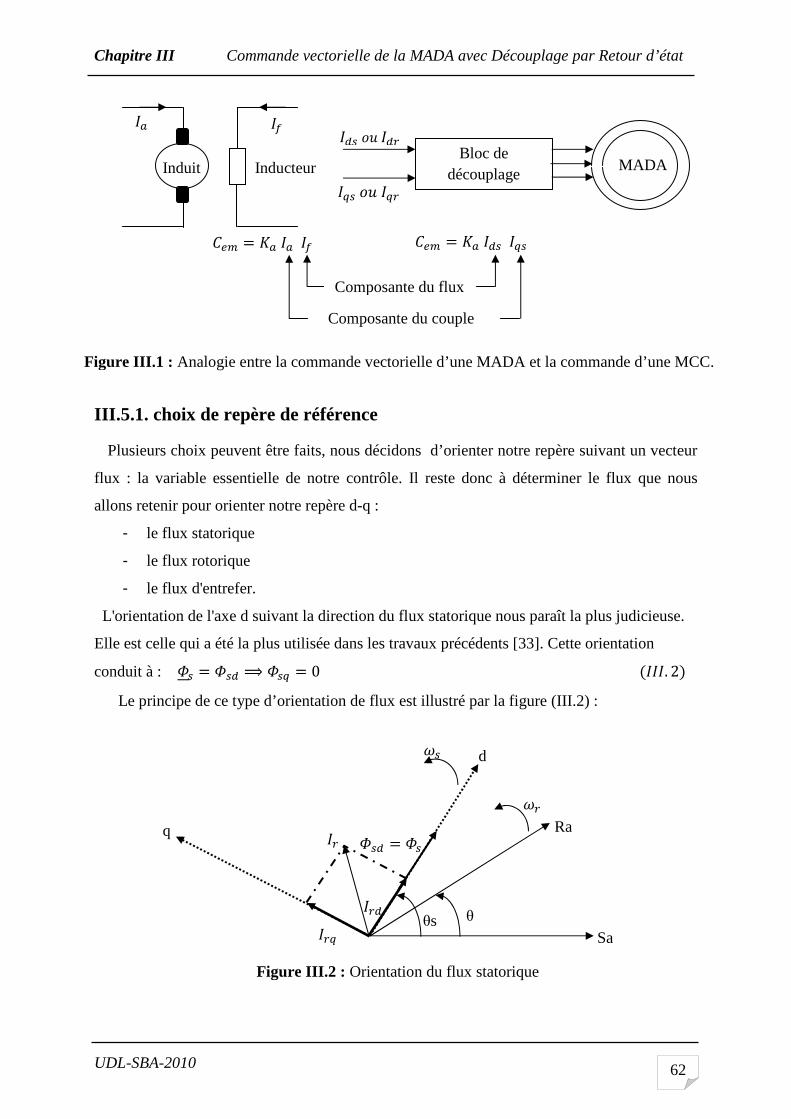
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 62
III.5.1. choix de repère de référence
Plusieurs choix peuvent être faits, nous décidons d’orienter notre repère suivant un vecteur
flux : la variable essentielle de notre contrôle. Il reste donc à déterminer le flux que nous
allons retenir pour orienter notre repère d-q :
- le flux statorique
- le flux rotorique
- le flux d'entrefer.
L'orientation de l'axe d suivant la direction du flux statorique nous paraît la plus judicieuse.
Elle est celle qui a été la plus utilisée dans les travaux précédents [33]. Cette orientation
conduit à : 0 . 2
Le principe de ce type d’orientation de flux est illustré par la figure (III.2) :
Figure II I .1 : Analogie entre la commande vectorielle d’une MADA et la commande d’une MCC.
Composante du flux
Composante du couple
Inducteur Induit
MADA Bloc de
découplage
θs
θ
q
d
Ra
Sa
Figure III.2 : Orientation du flux statorique
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 63
Ce choix du repère permet d'écrire des équations qui modélisent notre système en régime
permanent de la façon suivante :
!"#$ % $ % & $ % ' $ % &
( III. 3
Compte tenu des hypothèses de travail retenues, cela nous incite à prendre le courant
statorique dans l'axe d nul, 0. Le courant et la tension dans cet axe sont alors en
phase: $ $ +, .
Dans ce cas, nous obtenons un facteur de puissance unitaire au stator, donc la puissance
réactive statorique est nulle - 0.
Ces simplifications conduisent à l'expression du couple électromagnétique : ./ 0 ./ 0 . 4
Cette expression est semblable à celle d'une machine à courant continu où un découplage
entre le flux et le couple électromagnétique est naturel.
III.5.2. Contrôle des courants avec découplage par retour d’état
Cherchons à exploiter cette méthode pour découpler les courants de la MADA projetés sur
un repère tournant (d–q).
III.5.2.1. Modélisation sous forme d’état de la MADA
L’introduction des grandeurs complexes aux équations suivantes : $2 $ & 3$$4 $ & 3$ 2 & 34 & 3 2 & 34 & 3 . 5 Nous a permis d’écrire les relations entre les tensions et les courants de la machine :
6$2 $47 8 % & , 9 & 3 9 , : & 3 : , : & 3 : ' % & , 9 & 3 9 ' ; 62 4
7 . 6
En cherchant à exprimer =>2? >4? @A en fonction de B2 4CA et B$2 $4CA nous obtenons :

Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 64
, 62 47 D'E1 ' 3E & E3 ' 3 E5 E4 & 3 E6 'E2 ' 3 ' FG 62 4
7 & D H1 – H3 'H3 H2 G 6$2 $47 . 7
Avec :
E 1 ' FF E1 %F % E2 %F % E3 % :F 9 9 E4 % :F 9 9
E5 :F 9 E6 :F 9 H1 1F 9 H2 1F 9 H3 :F 9 9
Nous retrouvons ainsi une représentation d’état classique dont le vecteur d’état est formé de
quatre composantes de courants dans le repère (d-q) et le vecteur d’entrée est formé de quatre
composantes de tensions dans le même repère.
III.5.2.2. Application à la MADA
Partant de l’équation (III.7) et en choisissant un vecteur d’état égal au vecteur de sortie,
formé des quatre courants de la machine. Le vecteur d’entrée étant formé des tensions
d’alimentation, nous obtenons alors la représentation suivante :
KLM NL & OP L ( . 8
Avec : L P B CA , B$ $ $ $CA . 9
N TUUUUUV 'E1 'E & E4 E6
& 'E1 'E6 E4
E3 'E5 'E2 WX '
E5 E3 ' WX & – E2 YZ
ZZZZ[ . 10
O 8 H10'H30 0H10'H3 'H30H20 0'H30H2 ; 81000 0100 0010 0001; \ . 11
Le choix de x = y rend le système complètement commandable et observable. En
appliquant la méthode de découplage sur ce système, il vient que :
] ^ ; `^ 0 +, K 9 Oab Oab N( . 12
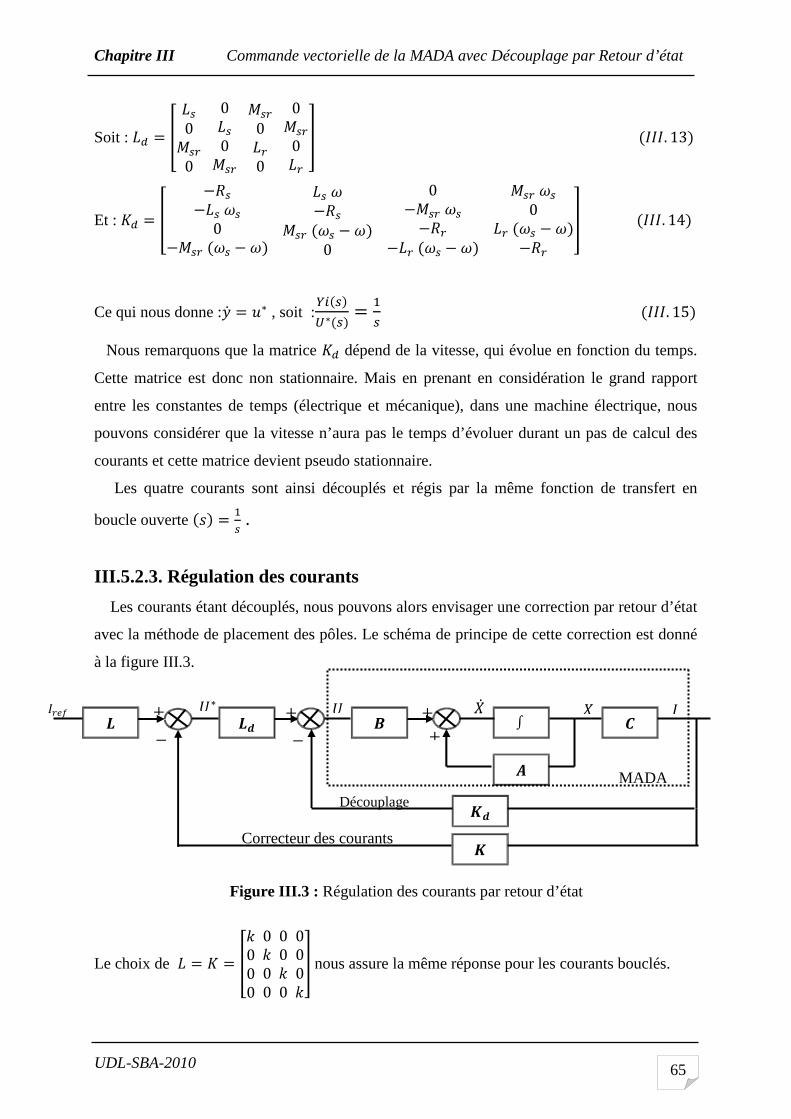
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 65
Soit : 9 8 90:0 090: :090 0:09
; . 13
Et : 8 '%'9 0': ' 9 '%: ' 0 0': '%'9 ' : 09 ' '%; . 14
Ce qui nous donne :PM c , soit :defc b . 15
Nous remarquons que la matrice dépend de la vitesse, qui évolue en fonction du temps.
Cette matrice est donc non stationnaire. Mais en prenant en considération le grand rapport
entre les constantes de temps (électrique et mécanique), dans une machine électrique, nous
pouvons considérer que la vitesse n’aura pas le temps d’évoluer durant un pas de calcul des
courants et cette matrice devient pseudo stationnaire.
Les quatre courants sont ainsi découplés et régis par la même fonction de transfert en
boucle ouverte b . III.5.2.3. Régulation des courants
Les courants étant découplés, nous pouvons alors envisager une correction par retour d’état
avec la méthode de placement des pôles. Le schéma de principe de cette correction est donné
à la figure III.3.
Le choix de 9 8g000 0g00 00g0 000g; nous assure la même réponse pour les courants bouclés.
Correcteur des courants
Découplage
MADA
&
& & & ' '
h hM i ic jk j l m
n
ok
o
p
Figure III.3 : Régulation des courants par retour d’état
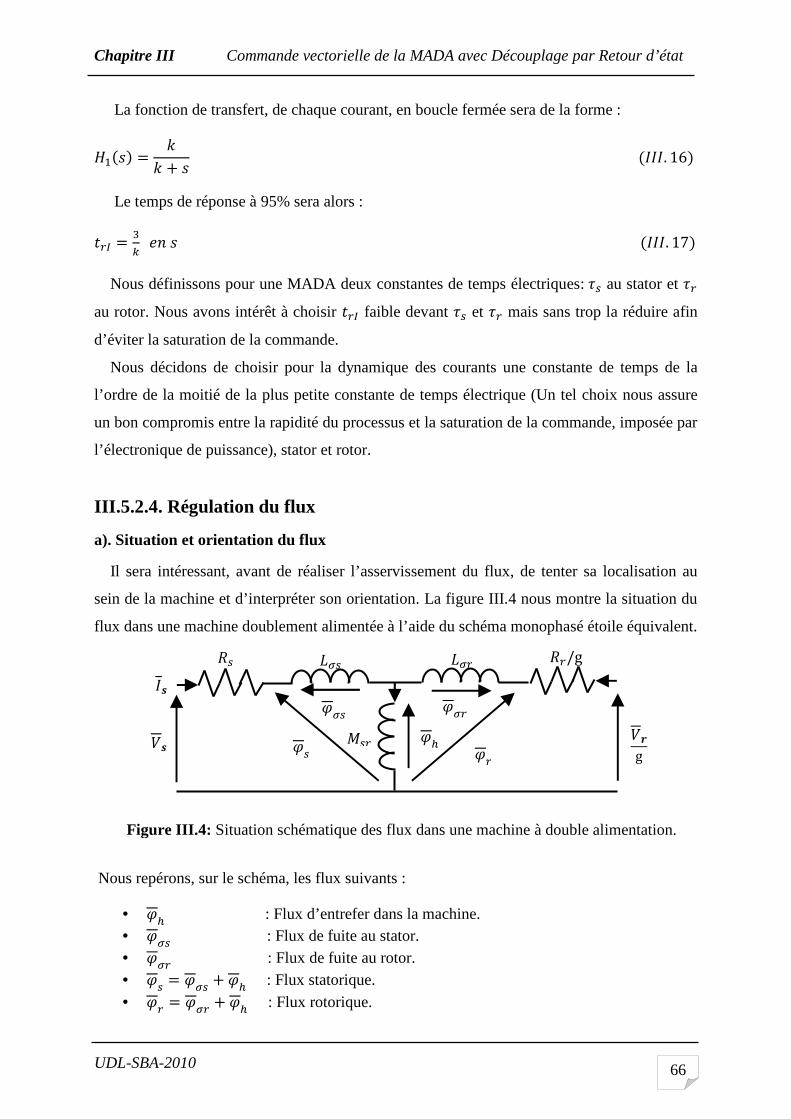
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 66
La fonction de transfert, de chaque courant, en boucle fermée sera de la forme :
qb gg & . 16
Le temps de réponse à 95% sera alors : ,> rs +t . 17
Nous définissons pour une MADA deux constantes de temps électriques: u au stator et u
au rotor. Nous avons intérêt à choisir ,> faible devant u et u mais sans trop la réduire afin
d’éviter la saturation de la commande.
Nous décidons de choisir pour la dynamique des courants une constante de temps de la
l’ordre de la moitié de la plus petite constante de temps électrique (Un tel choix nous assure
un bon compromis entre la rapidité du processus et la saturation de la commande, imposée par
l’électronique de puissance), stator et rotor.
III.5.2.4. Régulation du flux
a). Situation et orientation du flux
Il sera intéressant, avant de réaliser l’asservissement du flux, de tenter sa localisation au
sein de la machine et d’interpréter son orientation. La figure III.4 nous montre la situation du
flux dans une machine doublement alimentée à l’aide du schéma monophasé étoile équivalent.
Nous repérons, sur le schéma, les flux suivants :
• v : Flux d’entrefer dans la machine. • X : Flux de fuite au stator. • X : Flux de fuite au rotor. • X & v : Flux statorique. • X & v : Flux rotorique.
:
%/g
$4g
X
v
X
9X 9X %
$2
2
Figure III.4: Situation schématique des flux dans une machine à double alimentation.

Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 67
Avec : y 2 & 34 & 3z v & 3v(
Rappelons, qu’en réalité, c’est le flux d’entrefer qui est responsable de la rotation du rotor
(mieux sera connu, mieux la machine sera contrôlée), ce flux est la somme vectorielle fictive
du flux crée au stator et de celui crée au rotor. Toutefois, orienter le flux au stator ou au rotor
est souvent un choix préféré car il conduit à une mise en équations plus simple.
Nous pouvons donc tenter d’orienter les axes (d-q) suivant le flux statorique cités cidessus.
Orientation du flux au stator
Les équations du flux sont données par :
K 9 & : 9 & : ( . 18
L’orientation du flux suivant l’axe d, implique 0 soit ' ||~ .
Pour magnétiser la machine, nous avons l’option entre deux choix :
Travailler avec un facteur de puissance unitaire au stator ou au rotor, ce qui
implique que l’un des deux courants, ou , va être nul, soit : .
Scinder le courant magnétisant à égalité entre les deux convertisseurs, soit: > 9 & : > . 19
Le choix de 0 donne l’expression du flux, ne dépend que de et le facteur de
puissance au stator sera unitaire.
Intéressons nous dans la suite à l’étude de l’asservissement du flux au stator orienté suivant
l’axe d. Dans ces conditions les équations des tensions en régime permanent, des flux et du
couple dans la machine seront données par :
!"# $ 0 $ % & $ % & $ % &
( . 20
!"# : 0 9 ' X |~baX ( . 21
./ : ./ . 22
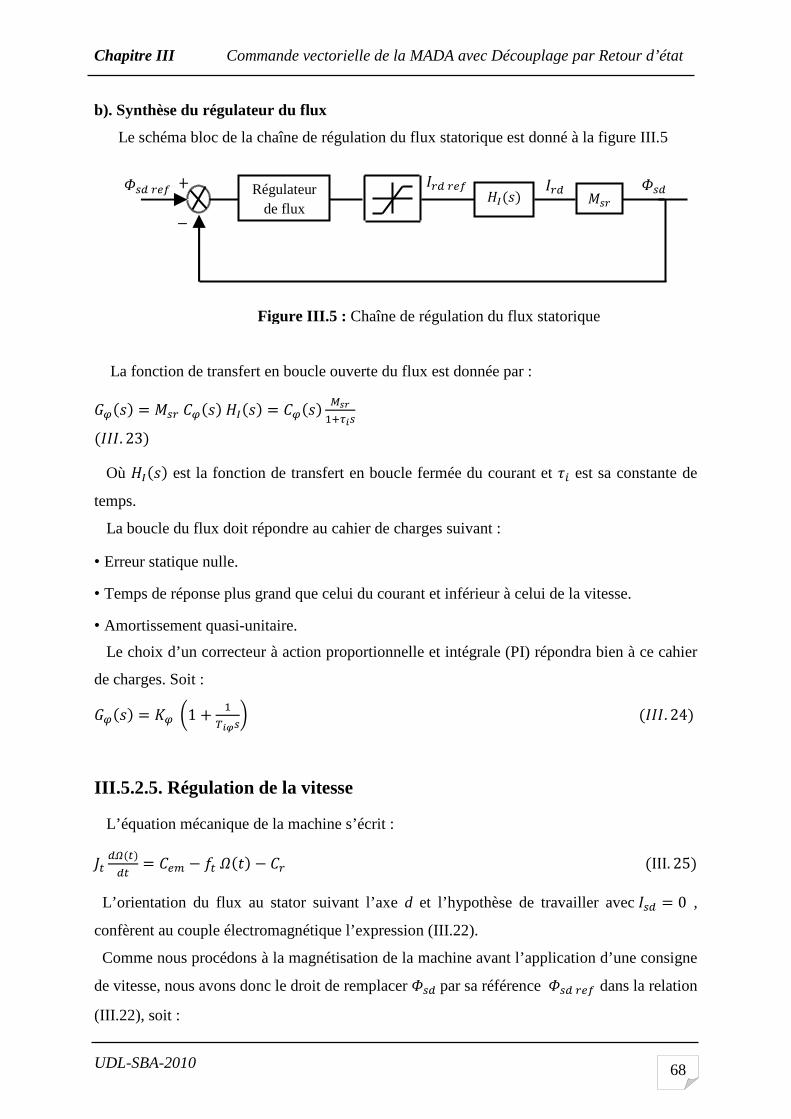
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 68
b). Synthèse du régulateur du flux
Le schéma bloc de la chaîne de régulation du flux statorique est donné à la figure III.5
La fonction de transfert en boucle ouverte du flux est donnée par :
: q> |~b . 23
Où q> est la fonction de transfert en boucle fermée du courant et ue est sa constante de
temps. La boucle du flux doit répondre au cahier de charges suivant :
• Erreur statique nulle.
• Temps de réponse plus grand que celui du courant et inférieur à celui de la vitesse.
• Amortissement quasi-unitaire.
Le choix d’un correcteur à action proportionnelle et intégrale (PI) répondra bien à ce cahier
de charges. Soit :
1 & bA . 24
III.5.2.5. Régulation de la vitesse
L’équation mécanique de la machine s’écrit :
? ?? ' ? , ' III. 25 L’orientation du flux au stator suivant l’axe d et l’hypothèse de travailler avec 0 ,
confèrent au couple électromagnétique l’expression (III.22).
Comme nous procédons à la magnétisation de la machine avant l’application d’une consigne
de vitesse, nous avons donc le droit de remplacer par sa référence dans la relation
(III.22), soit :
Figure III.5 : Chaîne de régulation du flux statorique
'
& Régulateur de flux
q> :
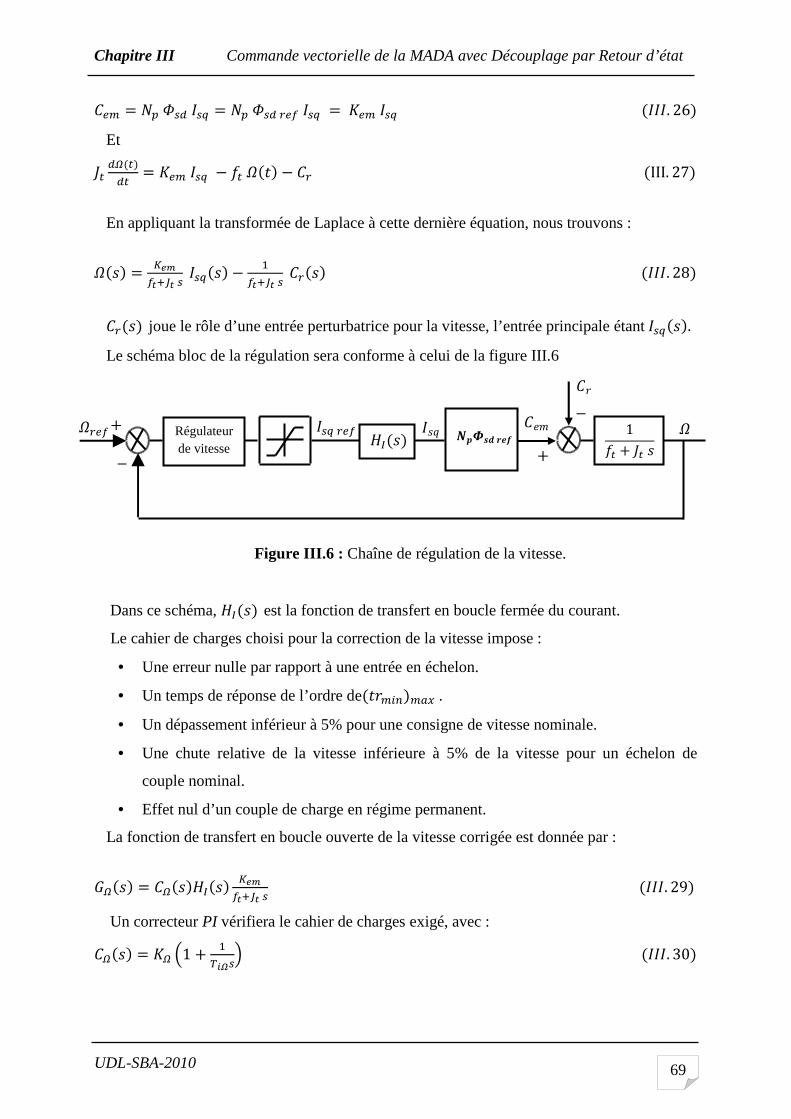
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 69
./ ./ . 26
Et ? ?? ' ? , ' III. 27
En appliquant la transformée de Laplace à cette dernière équation, nous trouvons :
' b . 28
joue le rôle d’une entrée perturbatrice pour la vitesse, l’entrée principale étant . Le schéma bloc de la régulation sera conforme à celui de la figure III.6
Dans ce schéma, q> est la fonction de transfert en boucle fermée du courant.
Le cahier de charges choisi pour la correction de la vitesse impose :
• Une erreur nulle par rapport à une entrée en échelon.
• Un temps de réponse de l’ordre de,e0 .
• Un dépassement inférieur à 5% pour une consigne de vitesse nominale.
• Une chute relative de la vitesse inférieure à 5% de la vitesse pour un échelon de
couple nominal.
• Effet nul d’un couple de charge en régime permanent.
La fonction de transfert en boucle ouverte de la vitesse corrigée est donnée par :
q> . 29
Un correcteur PI vérifiera le cahier de charges exigé, avec : 1 & bA . 30
Figure III.6 : Chaîne de régulation de la vitesse.
&
+
'
'
& Régulateur de vitesse
q> 1? & ?
2k 4
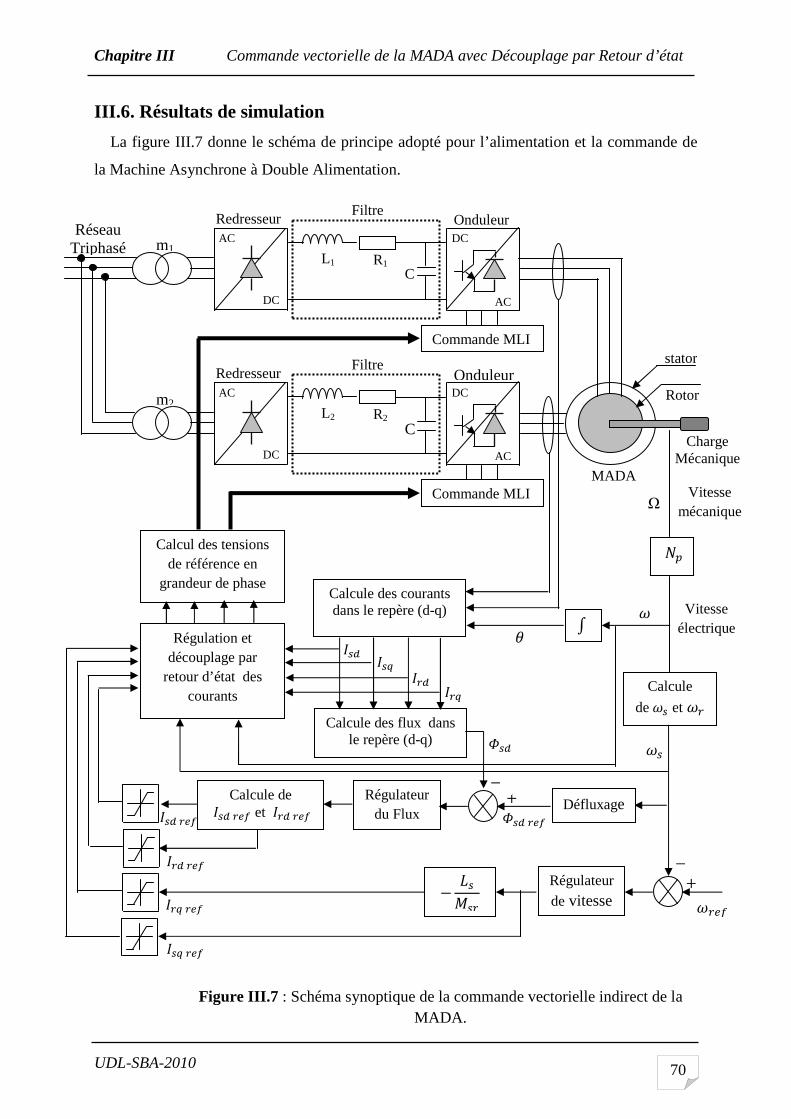
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 70
III.6. Résultats de simulation
La figure III.7 donne le schéma de principe adopté pour l’alimentation et la commande de
la Machine Asynchrone à Double Alimentation.
Figure II I.7 : Schéma synoptique de la commande vectorielle indirect de la
MADA.
&
&
'
'
Vitesse électrique
Ω Vitesse
mécanique
Réseau Triphasé
Charge Mécanique
MADA
m1
Filtre Onduleur Redresseur
L1 R1 C
AC
DC
DC
AC
Commande MLI
m2
Filtre Onduleur Redresseur
L2 R2
C
AC
DC
DC
AC
Commande MLI
stator
Rotor
Calcule des courants dans le repère (d-q)
Calcule des flux dans le repère (d-q)
Régulation et découplage par
retour d’état des courants
Calcul des tensions de référence en
grandeur de phase
p
./
Calcule
de et
' 9:
Défluxage Régulateur
du Flux Calcule de et
Régulateur
de vitesse
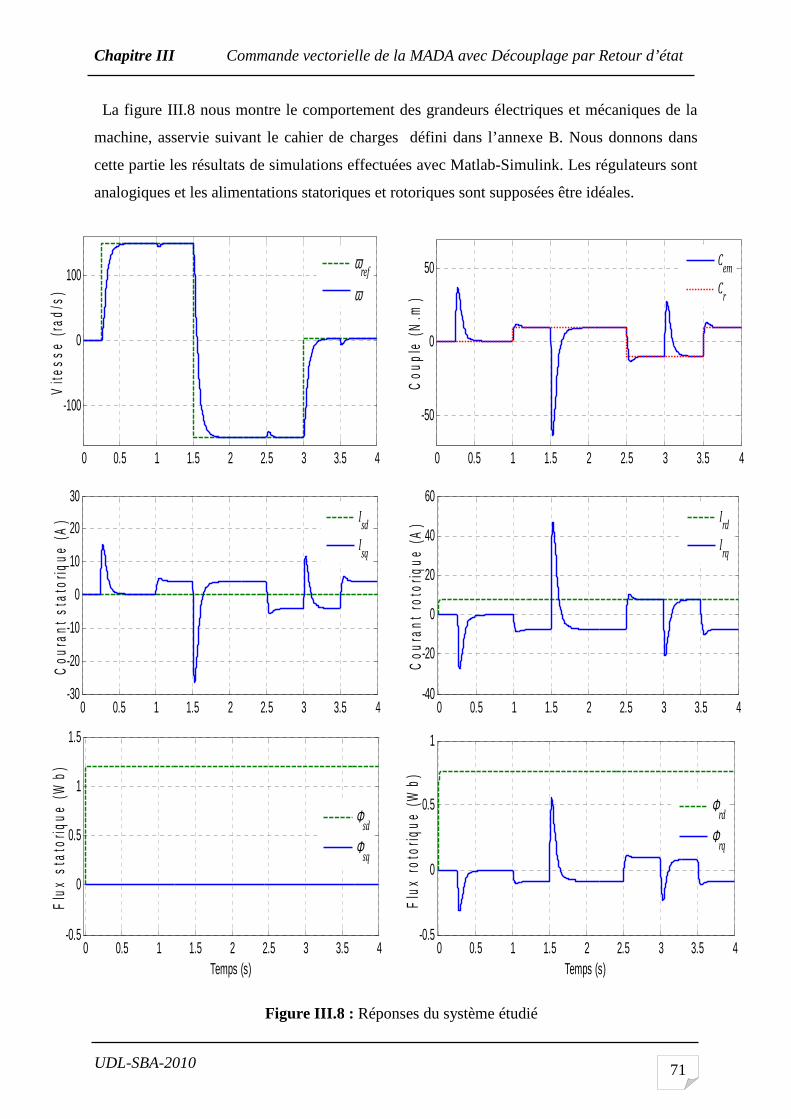
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 71
0 0.5 1 1.5 2 2.5 3 3.5 4
-100
0
100
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3 3.5 4
-50
0
50
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
10
20
30
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-40
-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
ωref
ω
La figure III.8 nous montre le comportement des grandeurs électriques et mécaniques de la
machine, asservie suivant le cahier de charges défini dans l’annexe B. Nous donnons dans
cette partie les résultats de simulations effectuées avec Matlab-Simulink. Les régulateurs sont
analogiques et les alimentations statoriques et rotoriques sont supposées être idéales.
Figure III.8 : Réponses du système étudié
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 72
Installation du flux
Comme prévu, nous trouvons une réponse apériodique et sans dépassement pour le flux
avec un temps de réponse de : , 32 et le flux reste pratiquement à zéro.
Démarrage de la machine
Une fois le flux installé, nous procédons au démarrage de la MADA à partir de l’instant
0.25s. Nous observons alors que :
La réponse en vitesse est apériodique avec un temps de réponse de , 0.23 . Le flux au stator reste à sa valeur de consigne durant le démarrage. Le couple électromagnétique marque un pic de 37 .. . Les courants de démarrage statoriques et rotoriques (courants suivant l’axe q) font un
pic de 15.4 A et 27.5 A respectivement. Comme le démarrage a lieu à vide, ces courants reviennent pratiquement à zéro à la fin du régime transitoire.
Ces résultats montrent que le découplage entre le couple électromagnétique et le flux
statorique est très satisfaisant.
Application d’un couple de charge nominal
En appliquant sur l’arbre de la machine un couple de charge nominal à t = 1s, nous
constatons que :
Les courants restent, en régime permanent, à leurs valeurs nominales et le flux reste constant et égal à sa valeur nominale.
Le temps d’établissement de la vitesse s’élève à 0.064 s. Sa chute relative à un couple
de charge nominal est : . 100 3.2%.
L’allure du couple électromagnétique est identique à celle des courants qui le génèrent () et il se compense rapidement.
D’après ces résultats de simulation, on note que le régulateur PI règle rapidement la
perturbation dû à la variation de la charge, qui affecte légèrement la réponse de la vitesse. En
conséquence, cette perturbation n’influe pas pratiquement sur les flux statoriques ce qui
montre l’efficacité de la commande vectorielle et la validité des lois imposées.
Inversion du sens de rotation de la machine
L’inversion de vitesse est réalisée à couple constant. Au passage par la vitesse nulle, le
couple résistant devient un couple moteur.
A l’inversion de la vitesse le moteur fournit de la puissance active au bus continu d’où la
raison de choisir un redresseur actif pour alimenter ce bus [41].
Le régime transitoire de la vitesse dur 0.23 , identique au temps de réponse au démarrage.
Les pics des courants statoriques et rotoriques sont plus importants qu’au démarrage à vide 26.5 A et 47.4 A respectivement. Alors que le couple atteint 63.5 N.m.
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 73
Nous pouvons constater que le changement de consigne et l’inversion du sens de rotation ne
provoquent aucun dépassement au niveau de la réponse de vitesse et le découplage persiste
toujours, ce qui montre la robustesse de ce réglage face à des larges variations de vitesse.
Application d’un couple de charge nominal
Lors de l’application d’un couple de charge nominale à l’inversion de sens de rotation de la
machine, nous constatons que :
Les courants restent, en régime permanent, à leurs valeurs nominales et le flux reste constant et égal à sa valeur nominale.
Le temps d’établissement de la vitesse s’élève à 0.094 s. Sa chute relative à un couple
de charge nominal est : . 100 6%.
Le couple électromagnétique se compose plus l’entant que le cas précédent (sens contraire)
Inversion du couple de charge à faible vitesse
Durant cette phase nous imposons une vitesse de 2.5% de la vitesse nominal, nous pouvons
alors citer les remarques suivantes :
Le flux reste à sa valeur de consigne durant l’inversion du couple. Lors de l’inversion du couple, la vitesse chute et devient même négative,
fonctionnement non souhaité pour un bon nombre d’application [41]. Pour éviter ce problème il faut que la consigne de vitesse relative minimale soit supérieure à 3x2.5%.
Le produit de la chute relative de la vitesse par le temps de rétablissement se situe autour de 0.055 s, valeur supérieure à celle imposée par le cahier de charges.
Les remarques sur les courants et le couple resteront identiques à celles annoncées lors de l’application d’un couple nominal.
III.7. Etude de l’effet des incertitudes paramétriques
Les paramètres des machines ne donnent pas lieu à des valeurs certaines et définitives. Ces
variations correspondent à la dispersion constatée lors de la fabrication en nombre, aux
évaluations des valeurs lors du fonctionnement ou aux méthodes utilisées pour l’identification
des machines.
Plusieurs phénomènes physiques provoquent des variations des paramètres du modèle de la
machine asynchrone. Entre autres, une élévation de température augmente les valeurs des
résistances. Si l’on fixe une plage de variation de température de l’ordre de -123.15 °C
(150°K), au stator et au rotor, et sachant que le coefficient de température du cuivre est de -
269.25 x 10-3 °C-1 (3.9x10-3 K-1), nous déterminons des variations de ± 30% des deux
résistances. A ce phénomène vient s’ajouter, entre autres, l’effet de peau dû aux fréquences
des courants, le type de ventilation de la machine, ainsi que l’erreur d’identification de ces
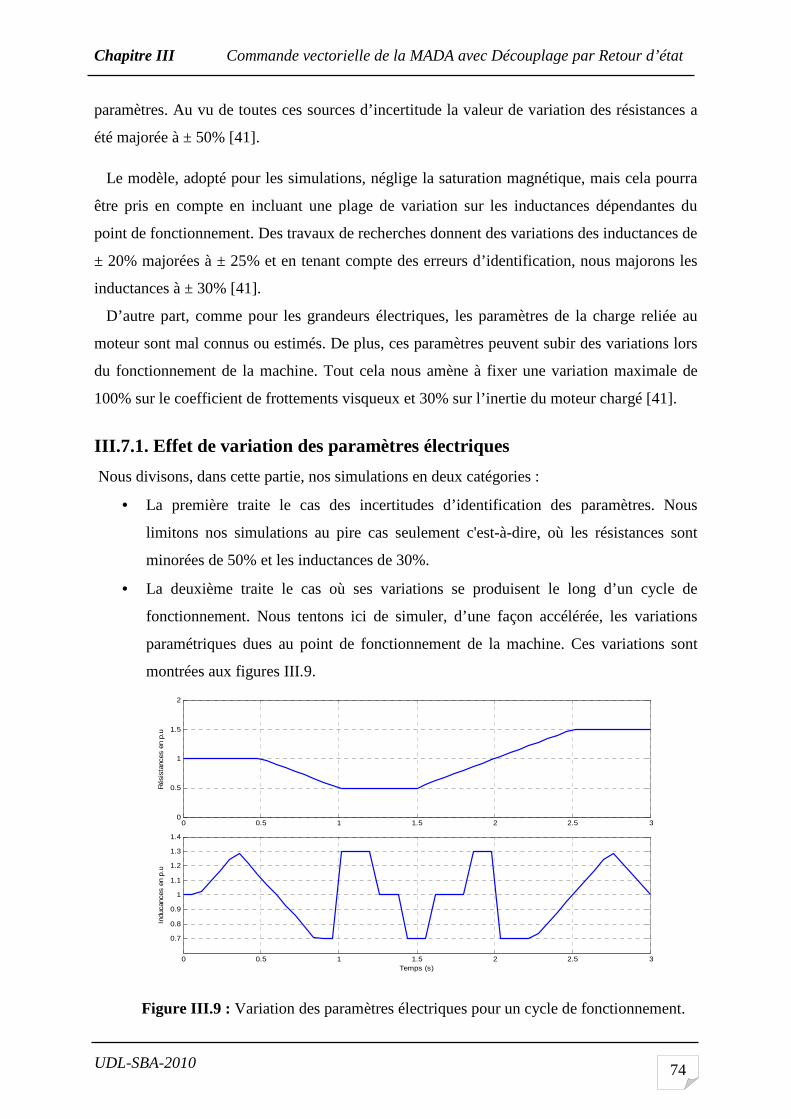
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 74
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Rés
ista
nces
en
p.u
0 0.5 1 1.5 2 2.5 3
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
Temps (s)
Indu
canc
es e
n p.
u
paramètres. Au vu de toutes ces sources d’incertitude la valeur de variation des résistances a
été majorée à ± 50% [41].
Le modèle, adopté pour les simulations, néglige la saturation magnétique, mais cela pourra
être pris en compte en incluant une plage de variation sur les inductances dépendantes du
point de fonctionnement. Des travaux de recherches donnent des variations des inductances de
± 20% majorées à ± 25% et en tenant compte des erreurs d’identification, nous majorons les
inductances à ± 30% [41].
D’autre part, comme pour les grandeurs électriques, les paramètres de la charge reliée au
moteur sont mal connus ou estimés. De plus, ces paramètres peuvent subir des variations lors
du fonctionnement de la machine. Tout cela nous amène à fixer une variation maximale de
100% sur le coefficient de frottements visqueux et 30% sur l’inertie du moteur chargé [41].
III.7.1. Effet de variation des paramètres électriques
Nous divisons, dans cette partie, nos simulations en deux catégories :
• La première traite le cas des incertitudes d’identification des paramètres. Nous
limitons nos simulations au pire cas seulement c'est-à-dire, où les résistances sont
minorées de 50% et les inductances de 30%.
• La deuxième traite le cas où ses variations se produisent le long d’un cycle de
fonctionnement. Nous tentons ici de simuler, d’une façon accélérée, les variations
paramétriques dues au point de fonctionnement de la machine. Ces variations sont
montrées aux figures III.9.
Figure III.9 : Variation des paramètres électriques pour un cycle de fonctionnement.
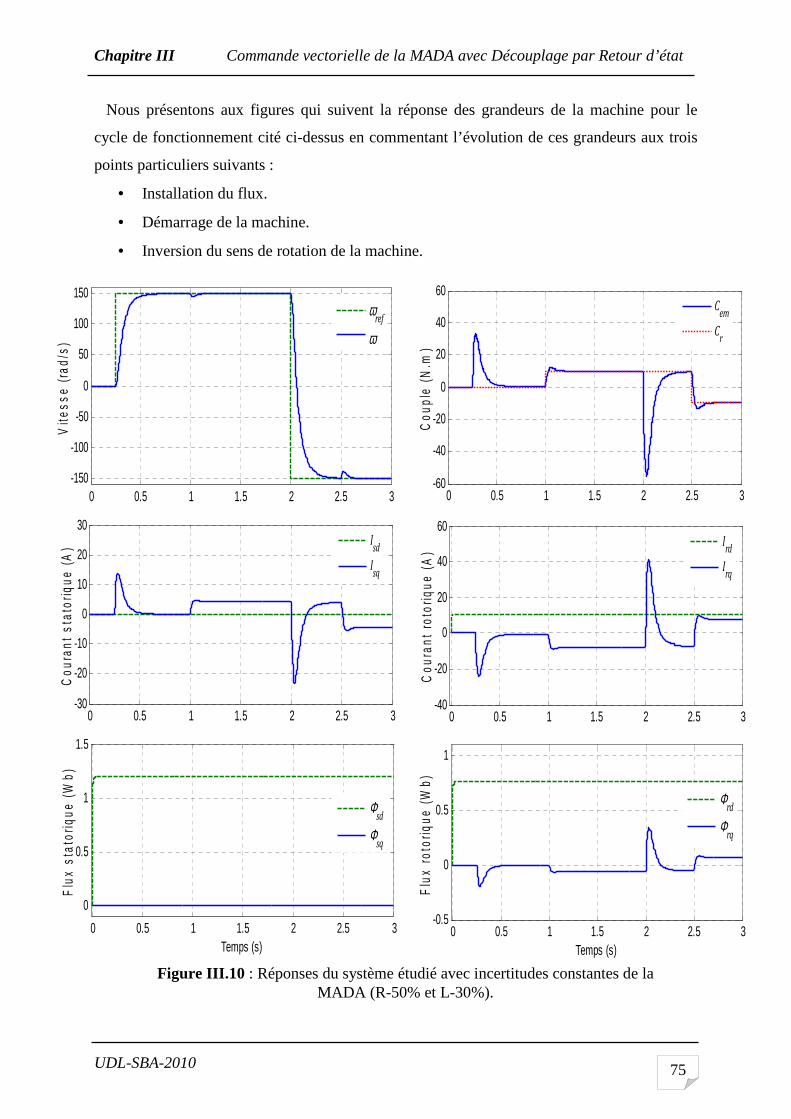
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 75
0 0.5 1 1.5 2 2.5 3-150
-100
-50
0
50
100
150
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Isd
Isq
Φsd
Φsq
Cem
Cr
Ird
Irq
Φrd
Φrq
ωref
ω
Nous présentons aux figures qui suivent la réponse des grandeurs de la machine pour le
cycle de fonctionnement cité ci-dessus en commentant l’évolution de ces grandeurs aux trois
points particuliers suivants :
• Installation du flux.
• Démarrage de la machine.
• Inversion du sens de rotation de la machine.
Figure III.10 : Réponses du système étudié avec incertitudes constantes de la MADA (R-50% et L-30%).
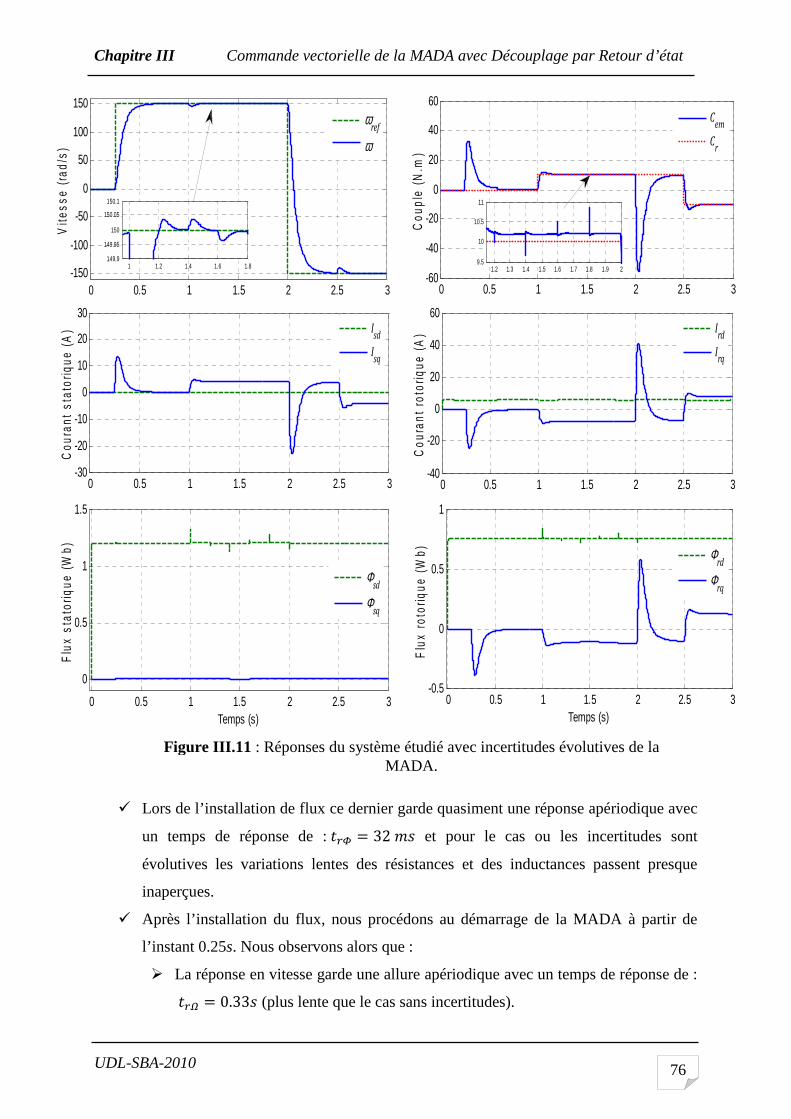
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 76
0 0.5 1 1.5 2 2.5 3-150
-100
-50
0
50
100
150
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Cem
Cr
Isd
Isq
Φsd
Φsq
Ird
Irq
Φrd
Φrq
1 1.2 1.4 1.6 1.8149.9
149.95
150
150.05
150.1
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 29.5
10
10.5
11
ωref
ω
Lors de l’installation de flux ce dernier garde quasiment une réponse apériodique avec
un temps de réponse de : , 32 et pour le cas ou les incertitudes sont
évolutives les variations lentes des résistances et des inductances passent presque
inaperçues.
Après l’installation du flux, nous procédons au démarrage de la MADA à partir de
l’instant 0.25s. Nous observons alors que :
La réponse en vitesse garde une allure apériodique avec un temps de réponse de : , 0.33 (plus lente que le cas sans incertitudes).
Figure III.11 : Réponses du système étudié avec incertitudes évolutives de la MADA.
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 77
Le flux au stator reste à sa valeur de consigne durant le démarrage.
Les courants transitoires et permanents sont moins importants que les courants
établis sans incertitudes paramétriques. De plus, le pic du couple
électromagnétique est moins important.
Dans le cas ou les incertitudes sont évolutives et entre 1 s et 1.8 s nous faisons
des variations brusques des inductances à ±30% de leurs valeurs nominales. Ces
variations vont induire une perturbation de la vitesse, dues essentiellement à des
variations brusques du couple électromagnétique. Ces variations du couple seront
compensées par une augmentation ou une diminution des courants qui les
génèrent. La dynamique d’établissement du couple est imposée par la dynamique
des courants, la vitesse étant beaucoup plus lente. Durant cette phase, le flux est
légèrement affecté au moment du changement des valeurs des inductances.
Lors de l’inversion du sens de rotation de la machine, les courants sont moins
importants que le cas sans incertitudes, et de même pour le couple. Le flux reste
constant égal à sa valeur nominale. l’inversion du sens de rotation ne provoque aucun
dépassement au niveau de la réponse de vitesse et le découplage persiste toujours.
Lors d’une variation de la charge, cette dernière affecte légèrement la réponse
dynamique de la vitesse. En conséquence, cette perturbation n’influe pas pratiquement
sur les flux statoriques.
D’après ces résultats, on remarque de façon claire une grande robustesse de la
commande vis-à-vis des variations extrêmes des résistances et des inductances. Le flux, le
couple électromagnétique, les courants et la vitesse sont faiblement affectés
III.7.2. Effet de variation des paramètres mécaniques
Nous nous intéressons dans cette partie à l’étude de l’effet des incertitudes des paramètres
mécaniques de la machine et/ou de la charge, en supposant que les paramètres électriques sont
connus.
Les paramètres mécaniques de la machine sont :
- L’inertie du moteur chargé ?. - Le coefficient des frottements visqueux ?.
Nous limitons notre étude aux cas où des incertitudes constantes avec les marges suivantes : ¡ 2? +, ¡ 5?
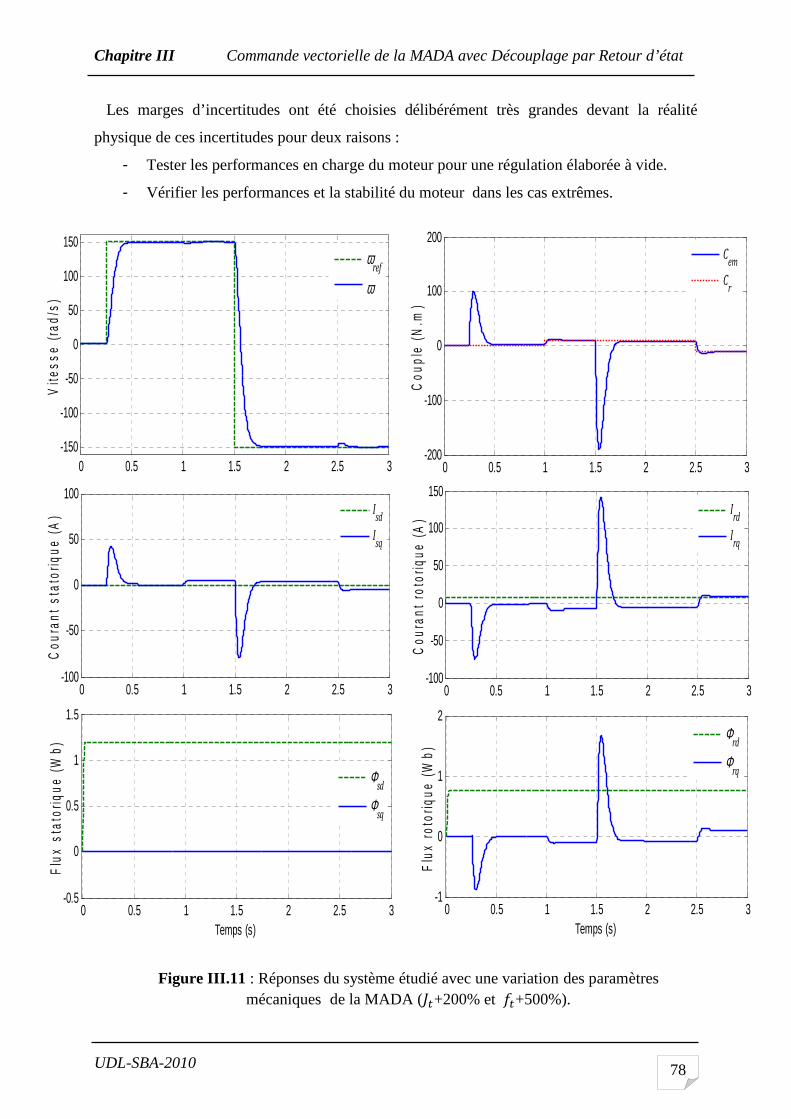
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 78
0 0.5 1 1.5 2 2.5 3-150
-100
-50
0
50
100
150
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-200
-100
0
100
200
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3-100
-50
0
50
100
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-100
-50
0
50
100
150
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-1
0
1
2
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Cem
Cr
Isd
Isq
Φsd
Φsq
Φrd
Φrq
Ird
Irq
ωref
ω
Les marges d’incertitudes ont été choisies délibérément très grandes devant la réalité
physique de ces incertitudes pour deux raisons :
- Tester les performances en charge du moteur pour une régulation élaborée à vide.
- Vérifier les performances et la stabilité du moteur dans les cas extrêmes.
Figure III.11 : Réponses du système étudié avec une variation des paramètres
mécaniques de la MADA (?+200% et ?+500%).
Chapitre III Commande vectorielle de la MADA avec Découplage par Retour d’état
UDL-SBA-2010 79
Au démarrage et l’inversion du sens de rotation de la machine, nous observons les
remarques suivantes :
Avec l’augmentation de l’inertie et le coefficient des frottements visqueux de la
machine, les courants passent en saturation durant presque toute la phase de
démarrage, en conséquence le couple sera à son tour saturé et la vitesse n’entraine
aucun dépassement.
A la fin de cette phase, la vitesse retrouve son allure apériodique. Le temps de
réponse enregistré est inférieur au temps de réponse sans incertitudes.
Le flux au stator reste à sa valeur de consigne durant le démarrage.
D’après ces résultats, en peut dire que la commande n’est pas robuste aux variations des
paramètres mécaniques.
III.8. Conclusion
Dans ce chapitre, nous avons exposé le principe de la commande vectorielle de la Machine
Asynchrone Doublement Alimentée. Puis, nous avons évoqué une nouvelle approche
permettant le découplage de ses courants dans un repère tournant (d-q). Ce principe est basé
sur un découplage entrée-sortie par retour d’état conduisant à des fonctions de transfert, des
courants par rapport à leurs références, très simples. Le découplage proposé est suivi d’une
commande par retour d’état de ces courants et orientation du flux statorique, munie d’un
régulateur PI classique. Des résultats de simulation ont été présentés.
L’étude de la commande du système lors des incertitudes paramétriques montre que la
commande est relativement robuste face à la variation des paramètres électriques et non
robuste vis-à-vis de la variation des paramètres mécaniques.
Pour améliorer les performances obtenues par le PI classique ; une autre technique de
commande sera présentée et utilisée, à savoir le mode glissant. Cette dernière occupe une
large place parmi les techniques de l’intelligence artificielle. Le but du prochain chapitre est
de présenter les aspects du mode glissant et son application au réglage de la vitesse d’une
machine asynchrone à double alimentation à flux statorique orienté.
Chapitre IV
Commande à régime glissant appliquée à la MADA
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 80
Chapitre IV
Commande à régime glissant appliquée à la MADA
IV.1. Introduction
En générale, de nombreux systèmes réels et notamment les machines électriques présentent
en plus des perturbations extérieures (variation de charge manipulée), des non linéarités
(exemple : frictions, hystérésis) et des perturbations paramétriques [9].
Les lois de commande utilisant les régulateurs de type PID donnent des bons résultats dans
le cas des systèmes linéaires à paramètres constants, mais pour des systèmes non linéaires, ces
lois de commande classique peuvent être insuffisantes car elles ne sont pas robustes surtout
lorsque les exigences sur la vitesse et autres caractéristiques dynamiques du système sont
strictes. On doit faire appel à des lois de commande insensibles aux variations de paramètres,
aux perturbations et aux non linéarités [44].
L’utilisation des algorithmes robustes (vis-à-vis de ces non linéarités et de ces perturbations)
est donc souhaitable aussi bien en régulation qu’en poursuite de trajectoire. Une solution
réside dans les commandes à structure variable à régime glissant. Dans notre travail, nous
fixons le même cahier des charges que celui utilisé lors d’un régulateur classique.
L’étude présentée dans ce chapitre concerne les algorithmes de commande à régime
glissant appliqués à la MADA pour le contrôle en vitesse. Nous présenterons dans un premier
temps quelques éléments de la théorie de contrôle à structure variable utilisant le mode de
glissement, puis les étapes à suivre pour concevoir cette commande.
IV.2. Généralités sur la théorie du contrôle par mode de glissement La théorie du mode glissant est le prolongement de l’étude des systèmes à structure
variable. Les premiers travaux concernant ces systèmes de commande ont été proposés et
élaborés au début des années 50 par Emelyanov, puis par d’autres chercheurs comme Utkin à
partir des résultats des études du mathématicien Filipov.
Par la suite, ces travaux ont été repris ailleurs, soit pour compléter l’étude théorique, soit
pour étudier quelques applications. Aux Etats-Unis, cette théorie est introduite par Slotine et
au Japon par Young, Harasma et Hashimoto. Il a fallu attendre les années 80, pour que le
concept de cette théorie trouve ses applications dans plusieurs domaines notamment dans les

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 81
systèmes de commande et serait parmi les techniques de contrôle non linéaire les plus
efficaces et les plus robustes [48].
Dans les systèmes à structure variable utilisant la commande par mode de glissement, on
peut trouver trois configurations de base pour la synthèse des différentes commandes [33] :
Structure par commutation au niveau de l'organe de commande : Cette structure de
commande est la plus classique et la plus usitée. Elle correspond au fonctionnement
tout ou rien des interrupteurs de puissance associés dans une grande majorité
d'application aux variateurs de vitesse.
Structure par commutation au niveau d'une contre-réaction d'état : c'est la structure la
moins exigeante au niveau de la sollicitation de la commande. Elle s'appuie sur la
commande par contre réaction d'état classique où le réglage de la dynamique du
système est réalisé par les gains de réglage. La non linéarité provient de la
commutation entre les gains, donc on crée une commutation au niveau de la
dynamique du système.
Structure par commutation au niveau de l'organe de commande avec ajout de la
"commande équivalente".
Cette dernière structure est retenue pour la suite dans notre étude.
IV.2.1. Présentation de la structure par commutation au niveau de l'organe de commande, avec ajout de la commande équivalente Une telle structure dont le principe est montré sur la figure IV.1 présente un réel avantage.
Elle permet de prépositionner l'état futur du système grâce à la commande équivalente qui
n'est rien d'autre que la valeur désirée du système en régime permanent. L'organe de
commande est beaucoup moins sollicité, mais on est plus dépendant des variations
paramétriques du fait de l'expression de cette commande équivalente [33].
Sortie
Perturbation
1
-1
Loi de commutation
∑
Figure. IV.1: Structure de régulation par ajout de la commande équivalente
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 82
Nous avons choisi de baser notre étude sur ce type de configuration de la commande, pour
plusieurs raisons [33] :
une telle structure, de par sa constitution, est très simple et nous permet de ne pas trop
solliciter la commande. Il nous semble en effet naturel d'ajouter la commande
équivalente pour pré-positionner le système dans un état désiré permanent et stable, et
de jouer ensuite sur le terme de commutation pour assurer la convergence vers cet état
et pour y rester ensuite.
cette méthode de commande a déjà été abordée dans des travaux de recherches.
Les auteurs mentionnent des résultats très satisfaisants pour des applications
robotiques ainsi que pour des applications utilisant des machines à induction.
nous avons voulu placer notre étude dans un cas original en utilisant une structure peu
connue et peu usitée.
IV.3. Principe de la commande à régime glissant
L'idée de base de la commande par régime glissant est premièrement d'attirer les états du
système dans une région convenablement sélectionnée, puis de concevoir une loi de
commande qui maintiendra toujours le système dans cette région [34]. En résumé, une
commande par régime glissant est divisée en trois parties:
• Le choix de la surface.
• L'établissement des conditions de la convergence.
• La détermination de la loi de commande.
IV.3.1. Définition des systèmes à structure variable
Un système à structure variable est un système dont la structure change pendant son
fonctionnement. Ce terme apparaît à cause de la commutation (variation discontinue) du
système et de son contrôleur (ou observateur) entre deux ou plusieurs structures. Cela est
principalement dû aux propriétés de stabilité que peut avoir le système global
indépendamment de celles de chacun des sous systèmes pris seuls [48].
Le comportement des systèmes possédant des discontinuités peut être décrit formellement
par l'équation : f, , . 1
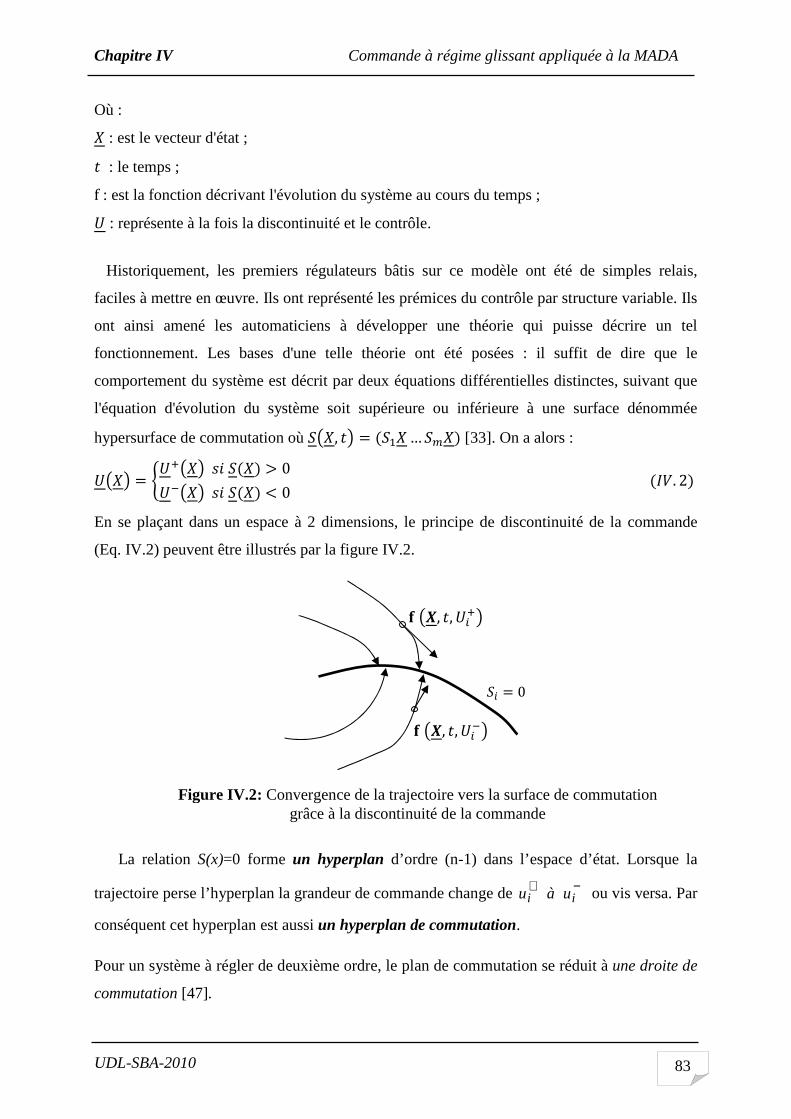
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 83
Où : : est le vecteur d'état ; : le temps ; f : est la fonction décrivant l'évolution du système au cours du temps ; : représente à la fois la discontinuité et le contrôle.
Historiquement, les premiers régulateurs bâtis sur ce modèle ont été de simples relais,
faciles à mettre en œuvre. Ils ont représenté les prémices du contrôle par structure variable. Ils
ont ainsi amené les automaticiens à développer une théorie qui puisse décrire un tel
fonctionnement. Les bases d'une telle théorie ont été posées : il suffit de dire que le
comportement du système est décrit par deux équations différentielles distinctes, suivant que
l'équation d'évolution du système soit supérieure ou inférieure à une surface dénommée
hypersurface de commutation où , … [33]. On a alors :
0! " 0# . 2
En se plaçant dans un espace à 2 dimensions, le principe de discontinuité de la commande
(Eq. IV.2) peuvent être illustrés par la figure IV.2.
La relation S(x)=0 forme un hyperplan d’ordre (n-1) dans l’espace d’état. Lorsque la
trajectoire perse l’hyperplan la grandeur de commande change de −+ii uàu ou vis versa. Par
conséquent cet hyperplan est aussi un hyperplan de commutation.
Pour un système à régler de deuxième ordre, le plan de commutation se réduit à une droite de
commutation [47].
0
% , , !
% , ,
Figure IV.2: Convergence de la trajectoire vers la surface de commutation grâce à la discontinuité de la commande

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 84
IV.3.2. Formulation des expressions générales de la commande par mode
de glissement
Le mode glissant est un mode de fonctionnement particulier des systèmes à structure
variable. Il est considéré comme un des approches les plus simples pour la commande des
systèmes non linéaires et les systèmes ayant un modèle imprécis. La caractéristique principale
de la commande par mode glissant est que la loi de commande se modifie d’une manière
discontinue. Les commutations de la commande s'effectuent en fonction des variables d'état,
utilisées pour créer une hypersurface dite de glissement dont le but est de forcer la dynamique
du système pour correspondre avec celle définie par l'équation de l'hypersurface. Quand l'état
du système est maintenu sur cette hypersurface, le système est dit en régime glissant [47].
Ainsi, le problème de l'existence du régime glissant se résume à analyser la trajectoire du
système, qui ne doit pas s'éloigner de l'hypersurface &. Nous cherchons à vérifier que la
distance et la dérivée de la distance (autrement dit, la vitesse d'approche), entre la trajectoire
et la surface de commutation soient opposées en signe [33], cela peut-être exprimé par
l’équation suivante : lim*+,- & 0 . lim*+,/ & " 0 . 3
Il s'agit du principe d'attractivité. Des justifications mathématiques complémentaires,
pourront être trouvées dans les ouvrages traitant des systèmes non linéaires.
Considérons maintenant une classe particulière de système, i.e. les systèmes linéaires vis à
vis de la commande. Leur évolution est décrite par l'équation différentielle suivante :
f , B, . 4
Où : f 3 4 : est un champ de vecteur ou fonction vectorielle ; X 3 4 : est le vecteur dont les composantes sont les variables d'état ; B, : est la matrice de commande de dimension 6 7 8 , car , 9, … , : 3 4. est le vecteur de commande tel que chacune de ces composantes , subit une discontinuité
sur une hypersurface (variété) de dimension 6 ; 1. Cela peut-être vu comme une réduction
de la dimension du problème sur l'hypersurface 0. Dans ce cas nous obtenons :

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 85
0! " 0# . 5
Le régime glissant s'effectue alors sur une variété 0 de dimension 6 ; 8 qui
résulte de l'intersection de toutes les 8 "hypersurfaces" 0. On peut écrire cette variété
sous la forme : , 9, … , : 0 avec 1,2,3, … , 8. Si , , ! sont des
fonctions continues. Dans ce cas là et si = 0 les fonctions f , et B, sont telles
qu'il existe une unique solution au problème formulé par l'équation (IV.4), alors nous sommes
en présence d'un système à structure variable.
La fonction de commutation sépare l'espace d'état en deux régions représentant des
structures différentes. C'est une fonction vectorielle dont les composantes sont des fonctions
scalaires représentatives d'une relation algébrique entre deux grandeurs. Elle est définie par
l'utilisateur afin d'obtenir les performances dynamiques désirées.
Lorsque nous sommes dans le "mode" de glissement, la trajectoire restera sur la surface de
commutation. Cela peut être exprimé par : , 0 . , 0 . 6
Nous pouvons donc introduire par dérivation partielle, le gradient de , qui est un vecteur
pointant de la région où < 0 vers la région où > 0. Dans le cas du régime de glissement
(Eq. IV.6), nous obtenons :
, ?@?A B@BC 7 BCBA B@BC 7 DEFG H 7 f , B, 0 . 7
Cela traduit le fait qu'en régime de glissement, la trajectoire restera sur la surface de
commutation, autrement dit, sa dérivée "fonctionnelle" sera nulle [33]. Dans le plan de phase
cette trajectoire est constituée de trois parties distinctes :
MC 0
Régime du mode glissant
MRP
MG
" 0 0
Figure IV.3: Les différents modes de trajectoire dans le plan de phase.
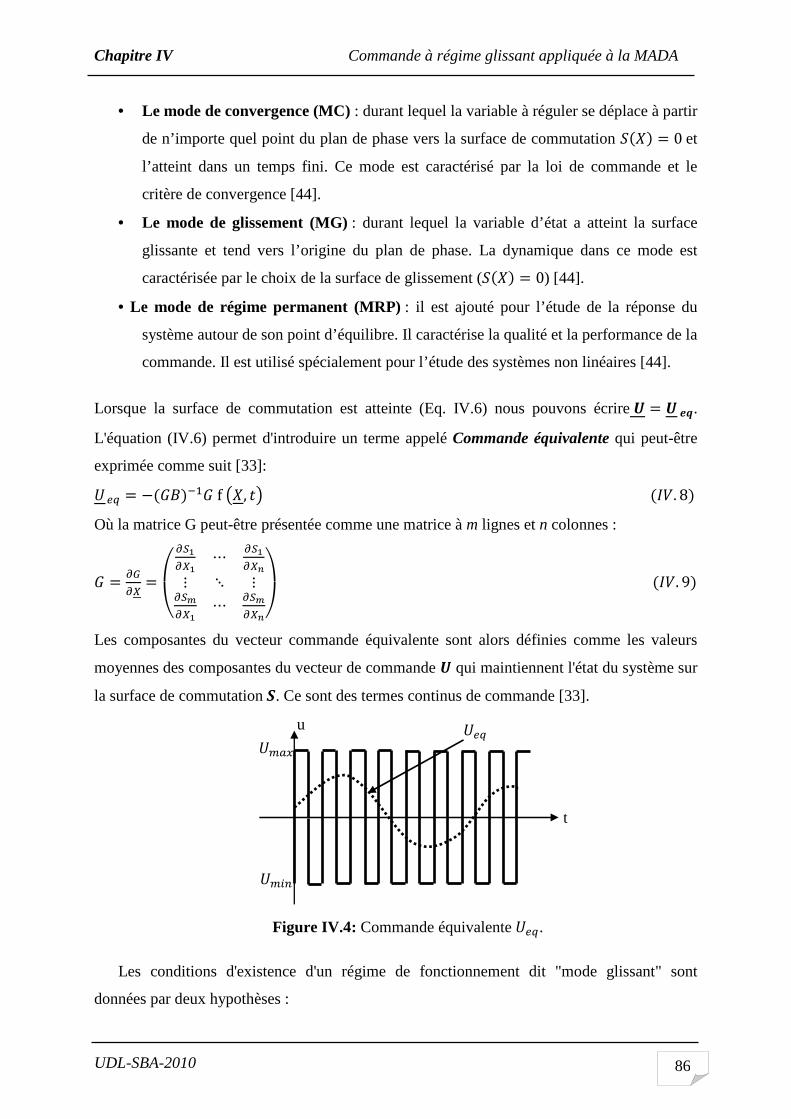
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 86
• Le mode de convergence (MC) : durant lequel la variable à réguler se déplace à partir
de n’importe quel point du plan de phase vers la surface de commutation 0 et
l’atteint dans un temps fini. Ce mode est caractérisé par la loi de commande et le
critère de convergence [44].
• Le mode de glissement (MG) : durant lequel la variable d’état a atteint la surface
glissante et tend vers l’origine du plan de phase. La dynamique dans ce mode est
caractérisée par le choix de la surface de glissement ( 0) [44].
• Le mode de régime permanent (MRP) : il est ajouté pour l’étude de la réponse du
système autour de son point d’équilibre. Il caractérise la qualité et la performance de la
commande. Il est utilisé spécialement pour l’étude des systèmes non linéaires [44].
Lorsque la surface de commutation est atteinte (Eq. IV.6) nous pouvons écrire J J KL.
L'équation (IV.6) permet d'introduire un terme appelé Commande équivalente qui peut-être
exprimée comme suit [33]: ;HM!H f , . 8
Où la matrice G peut-être présentée comme une matrice à m lignes et n colonnes :
H BOBC PQ
B@RBCR S B@RBCTU V UB@WBCR S B@WBCTXY . 9
Les composantes du vecteur commande équivalente sont alors définies comme les valeurs
moyennes des composantes du vecteur de commande J qui maintiennent l'état du système sur
la surface de commutation &. Ce sont des termes continus de commande [33].
Les conditions d'existence d'un régime de fonctionnement dit "mode glissant" sont
données par deux hypothèses :
u
t
*[
Figure IV.4: Commande équivalente .

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 87
le produit de matrice \] doit être inversible, c'est à dire que son déterminant doit
être non nul.
les conditions d'atteinte et de maintien en régime glissant respectent : " " *[ . 10. F
" 0 . 10. ^
Nous verrons que la deuxième condition servira à obtenir les gains utilisés pour la régulation
[33].
Si maintenant, nous introduisons le terme de commande équivalente dans l'équation
générale (IV.4), l'équation qui régit l'évolution du système en régime glissant est obtenue,
soit: _ ; MHM!H`f , . 11 : est la matrice identité.
Remarquons que dans l'équation (IV.11), le terme de commande n'intervient pas. Seul,
les paramètres du système et le gradient de la fonction de commutation sont susceptibles de
faire varier l'état du système [33].
En dehors de la surface de commutation, lorsque le système est en "mode d'approche",
(Reaching Mode), nous pouvons écrire l'équation traduisant l'évolution temporelle des
variables de notre système. Dans ce mode particulier, où l'équation d'état
conduit au résultat suivant [33]: _ ; MHM!H`f , M , . 12
Ce qui peut-être réduit à : M , . 13
Effectivement, cette relation est valable dans le cas le plus général mais aussi en
particulier lorsque H .
Dans ce mode particulier de fonctionnement, la réponse du système est exclusivement
assurée par la fonction [33]. Si nous généralisons, nous exprimons de façon pratique la
condition d'atteinte du régime glissant : ∑c3_,`Hcc " 0 defE ef 3 1, 6 . 14
Le vecteur de commande permet donc de régler les dynamiques des deux modes de
fonctionnement [33] :
- permet d'influer sur le mode d'approche,
- sur le mode de glissement.

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 88
IV.3.3. Conception de la commande par mode glissant
La conception de la commande par mode de glissement prend en compte les problèmes de
stabilité et de bonnes performances de façon systématique dans son approche [48]. En
général, pour réaliser ce type de commande trois étapes doivent être effectuées:
Choix de la surface de glissement ;
Détermination des conditions d’existence du régime glissant ou conditions d’accès ;
Synthèse des lois de commande du mode glissant.
IV.3.3.1. Choix de la surface de glissement
Le choix de la surface de glissement concerne non seulement le nombre nécessaire de ces
surfaces, mais également leurs formes en fonction de l’application et de l’objectif visé.
Généralement, le nombre des surfaces de glissement est choisi égal à la dimension du vecteur
de commande [48]. Le procédé le plus judicieux et le plus simple consiste à choisir une
surface de commutation égale au vecteur d’erreur [33], du vecteur d'état : g hi ; . 15
La surface de glissement est une fonction scalaire telle que la variable à régler glisse sur
cette surface et tend vers l’origine du plan de phase. Plusieurs formes de la surface de
glissement ont été proposées dans la littérature, chacune présente des meilleures performances
pour une application donnée [48].
La surface la plus utilisée pour obtenir le régime de glissement qui garantit la convergence
de l’état vers sa référence (donné par SOLTINE) [47], est définie par:
??A j! hi ; . 16
Où : n : est le degré relatif au nombre qu’il faut dériver la sortie pour faire apparaître la commande; j : est une constante positive.
L'objectif de cette commande est de garder la surface qui tend à zéro. Cette dernière est
une équation différentielle linéaire dont l'unique solution est 0, pour un choix
convenable du paramètre λ. Ceci revient à un problème de poursuite de trajectoire, ce
qui est équivalent à une linéarisation exacte de l'écart, tout en respectant la condition de
convergence [47].
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 89
IV.3.3.2. Conditions de convergence et d’existence
Les conditions d'existence et de convergence sont les critères qui permettent aux
dynamiques du système de converger vers la surface de glissement et d'y rester
indépendamment de la perturbation [47]. Pour cela nous retenons deux conditions :
Fonction directe de commutation
C’est l’approche la plus ancienne et directe, a été proposée et étudiée par Emilyanov et
Utkin. Elle est globale mais ne garantit pas, en revanche un temps d’accès fini [48]. Elle est
exprimée par :
" 0 . 17
Dans cette condition, il faut introduire pour et sa dérivée, les valeurs justes à gauche et
à droite de commutation [35].
Fonction de LYAPUNOV
L’approche de Lyapunov est une condition globale d’accès au mode glissant [48]. Il s’agit
de formuler une fonction scalaire positive 0 pour les variables d’état du système, et
de choisir la loi de commutation qui fera décroître cette fonction (i.e. " 0). Cette
fonction est généralement utilisée pour garantir la stabilité des systèmes non linéaires [35].
En définissant la fonction de LYAPUNOV par : 9 9 . 18
L’idée est de choisir cette fonction pour garantir l’attraction de la variable à contrôler vers
sa valeur de référence, et de concevoir une commande telle que le carré de la surface
correspond à une fonction de LYAPUNOV [48]. La dérivée de la fonction donne :
. 19
Pour que la fonction candidate de Lyapunov puisse décroitre et converger vers zéro (pour
garantir l’existence du mode de glissant) [46], il suffit d’assurer que:
" 0 . 20
Cette équation montre que le carré de la distance vers la surface, mesurée par 9, diminue tout le temps, contraignant la trajectoire du système à se diriger vers la surface des
deux cotés [35].

Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 90
IV.3.3.3. Synthèse des lois de commande du mode glissant
Nous avons détaillé comment obtenir les composantes du terme de commande "continue",
du vecteur de commande. Cela découle en partie de la modélisation choisie pour le système,
(Eq. 4.8). Nous avons par contre le choix du terme "discontinu" du vecteur de commande . Le vecteur commande à appliquer est obtenu par ajout de deux termes de commande tels que : . 21
Dans cette expression, une majorité d'auteurs s'accordent à dire que représente un
terme "Basse Fréquence" alors que représente un terme de "Haute Fréquence". Nous
ajoutons donc un terme représentant la valeur désirée en régime permanent, (de type continu),
à un terme commutant, permettant d'atteindre ce régime final, (de type discontinu) [33].
peut être choisi de manière tout à fait différente selon les utilisateurs :
La commande SIGN
La plus simple consiste à exprimer la commande discontinue _, 9, … , ` avec la
fonction signe par rapport à _, 9, … , ` : D6 l1 0;1 " 0# . 22 s’exprime donc comme : m D6 . 23 Où mest un gain positif.
Ce premier choix de la fonction discontinue est représenté sur la figure (IV.5) :
Le gain mest choisi positif pour satisfaire la condition (IV.20). Le choix de se gain est très
influent car, s’il est très petit le temps de réponse sera très long, et s’il est choisi très grand,
nous aurons des fortes oscillations au niveau de l’organe de la commande. Ces oscillations
peuvent exciter les dynamiques négligées (phénomène de chattering), ou même détériorer
l’organe de commande [35].
Figure IV.5: Définition de la fonction SIGN.
m
;m
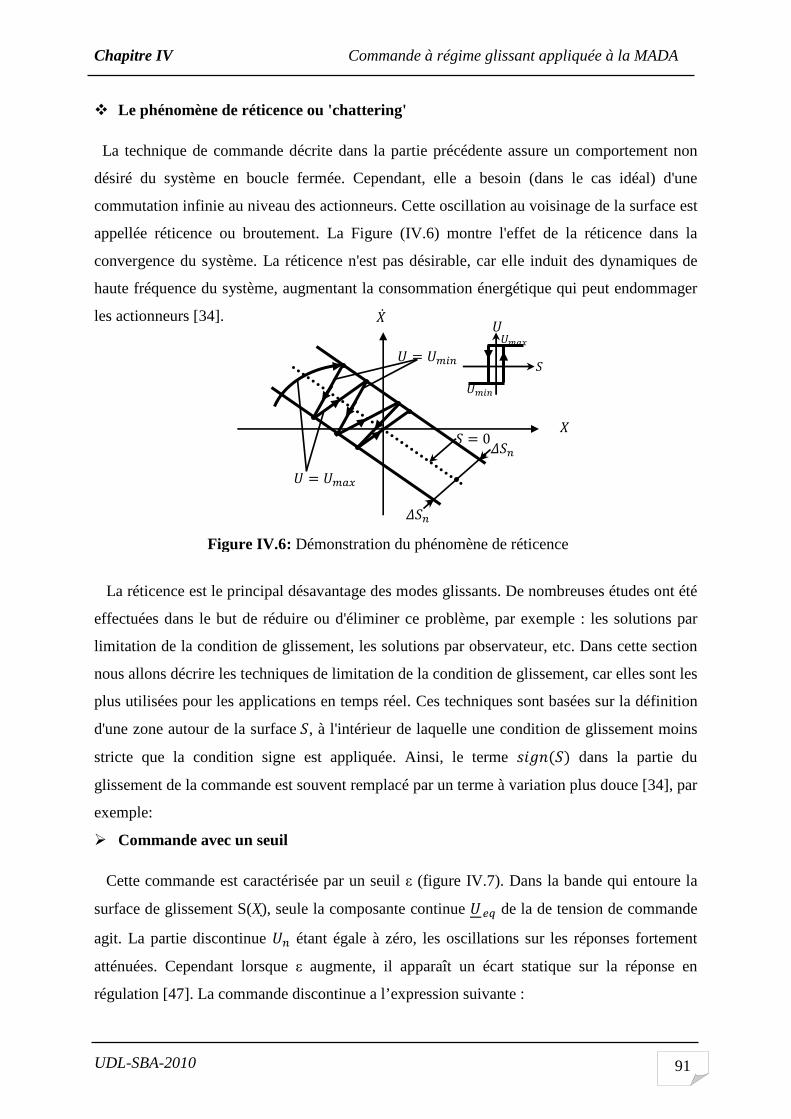
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 91
Le phénomène de réticence ou 'chattering'
La technique de commande décrite dans la partie précédente assure un comportement non
désiré du système en boucle fermée. Cependant, elle a besoin (dans le cas idéal) d'une
commutation infinie au niveau des actionneurs. Cette oscillation au voisinage de la surface est
appellée réticence ou broutement. La Figure (IV.6) montre l'effet de la réticence dans la
convergence du système. La réticence n'est pas désirable, car elle induit des dynamiques de
haute fréquence du système, augmentant la consommation énergétique qui peut endommager
les actionneurs [34].
La réticence est le principal désavantage des modes glissants. De nombreuses études ont été
effectuées dans le but de réduire ou d'éliminer ce problème, par exemple : les solutions par
limitation de la condition de glissement, les solutions par observateur, etc. Dans cette section
nous allons décrire les techniques de limitation de la condition de glissement, car elles sont les
plus utilisées pour les applications en temps réel. Ces techniques sont basées sur la définition
d'une zone autour de la surface , à l'intérieur de laquelle une condition de glissement moins
stricte que la condition signe est appliquée. Ainsi, le terme D6 dans la partie du
glissement de la commande est souvent remplacé par un terme à variation plus douce [34], par
exemple:
Commande avec un seuil
Cette commande est caractérisée par un seuil ε (figure IV.7). Dans la bande qui entoure la
surface de glissement S(X), seule la composante continue de la de tension de commande
agit. La partie discontinue étant égale à zéro, les oscillations sur les réponses fortement
atténuées. Cependant lorsque ε augmente, il apparaît un écart statique sur la réponse en
régulation [47]. La commande discontinue a l’expression suivante :
Figure IV.6: Démonstration du phénomène de réticence
0g
g
*[
*[
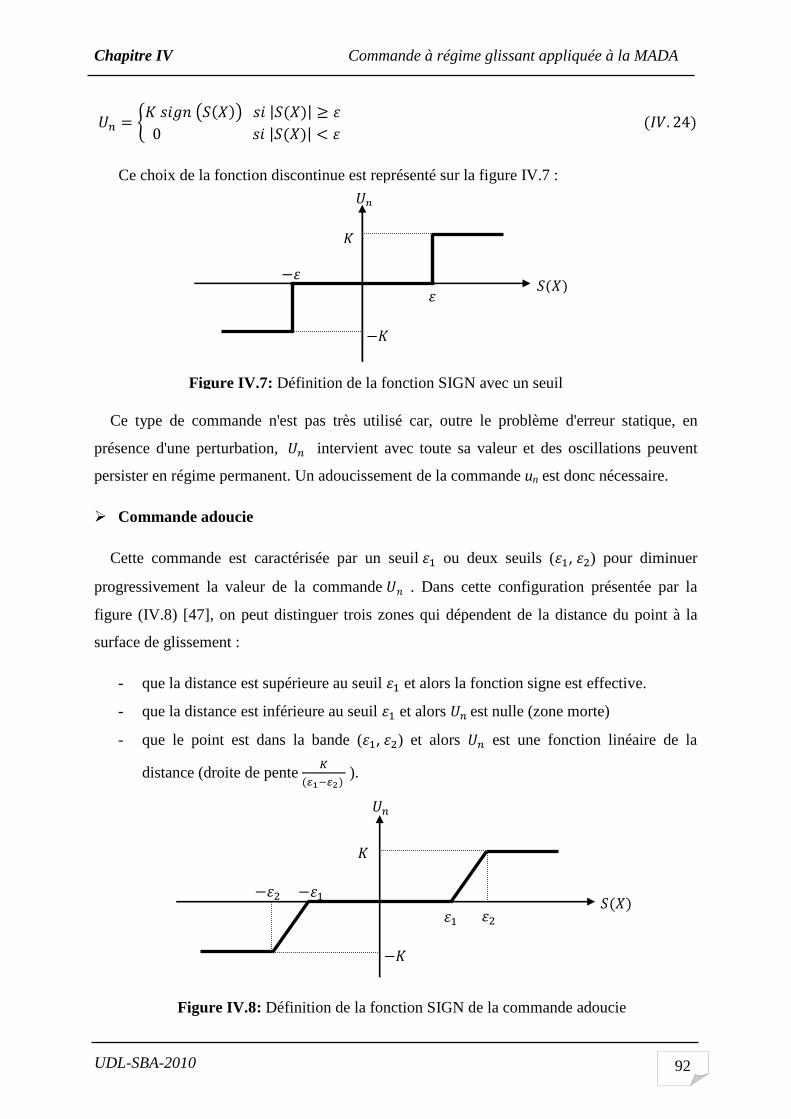
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 92
m D6 || o p 0 || " p # . 24
Ce choix de la fonction discontinue est représenté sur la figure IV.7 :
Ce type de commande n'est pas très utilisé car, outre le problème d'erreur statique, en
présence d'une perturbation, intervient avec toute sa valeur et des oscillations peuvent
persister en régime permanent. Un adoucissement de la commande un est donc nécessaire.
Commande adoucie
Cette commande est caractérisée par un seuil p ou deux seuils (p, p9) pour diminuer
progressivement la valeur de la commande 6 . Dans cette configuration présentée par la
figure (IV.8) [47], on peut distinguer trois zones qui dépendent de la distance du point à la
surface de glissement :
- que la distance est supérieure au seuil p et alors la fonction signe est effective.
- que la distance est inférieure au seuil p et alors est nulle (zone morte)
- que le point est dans la bande (p, p9) et alors est une fonction linéaire de la
distance (droite de pente qrR!rs ).
m
;p p
;m
Figure IV.7: Définition de la fonction SIGN avec un seuil
Figure IV.8: Définition de la fonction SIGN de la commande adoucie
;p9 ;p p9
m
p
;m
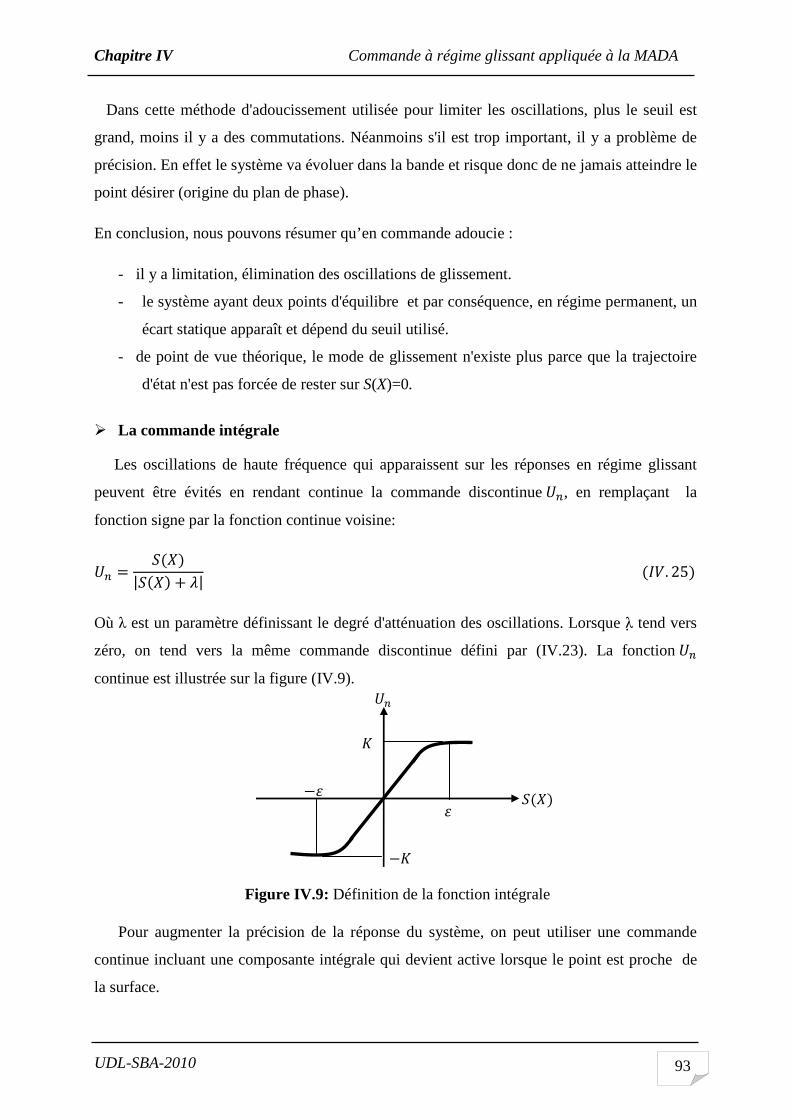
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 93
Dans cette méthode d'adoucissement utilisée pour limiter les oscillations, plus le seuil est
grand, moins il y a des commutations. Néanmoins s'il est trop important, il y a problème de
précision. En effet le système va évoluer dans la bande et risque donc de ne jamais atteindre le
point désirer (origine du plan de phase).
En conclusion, nous pouvons résumer qu’en commande adoucie :
- il y a limitation, élimination des oscillations de glissement.
- le système ayant deux points d'équilibre et par conséquence, en régime permanent, un
écart statique apparaît et dépend du seuil utilisé.
- de point de vue théorique, le mode de glissement n'existe plus parce que la trajectoire
d'état n'est pas forcée de rester sur S(X)=0.
La commande intégrale
Les oscillations de haute fréquence qui apparaissent sur les réponses en régime glissant
peuvent être évités en rendant continue la commande discontinue , en remplaçant la
fonction signe par la fonction continue voisine:
| j| . 25
Où λ est un paramètre définissant le degré d'atténuation des oscillations. Lorsque λ tend vers
zéro, on tend vers la même commande discontinue défini par (IV.23). La fonction
continue est illustrée sur la figure (IV.9).
Pour augmenter la précision de la réponse du système, on peut utiliser une commande
continue incluant une composante intégrale qui devient active lorsque le point est proche de
la surface.
;p p
;m
m
Figure IV.9: Définition de la fonction intégrale
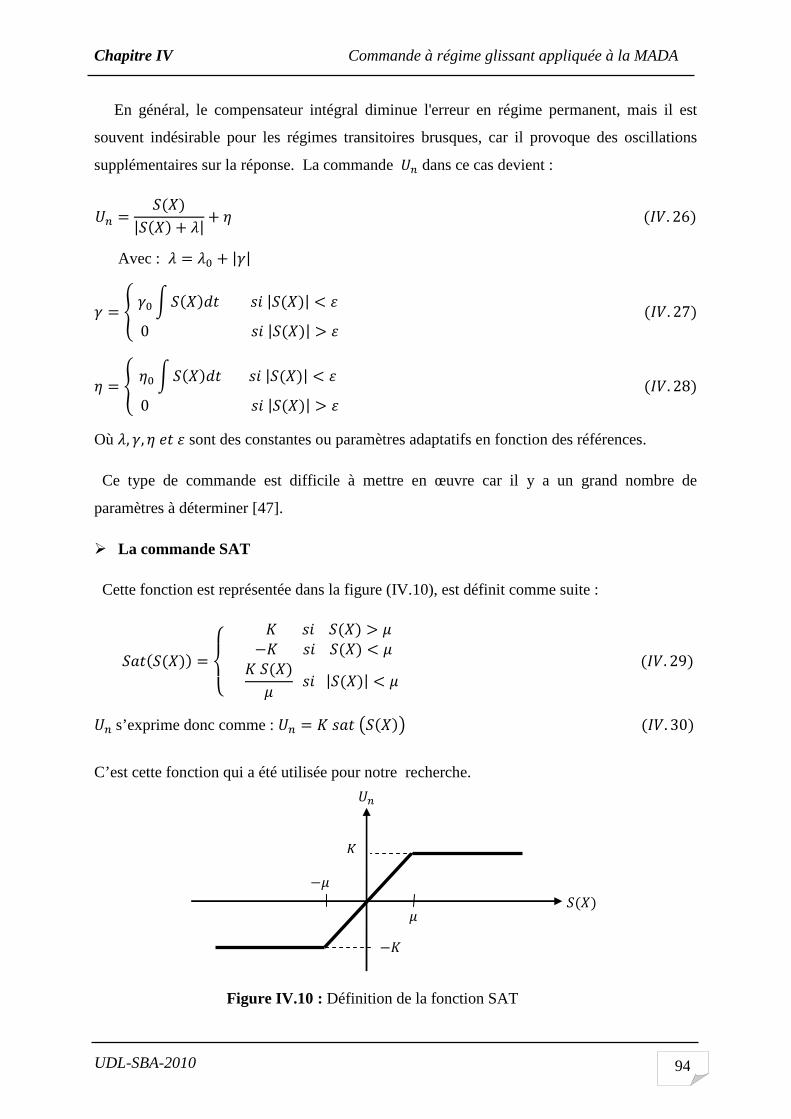
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 94
En général, le compensateur intégral diminue l'erreur en régime permanent, mais il est
souvent indésirable pour les régimes transitoires brusques, car il provoque des oscillations
supplémentaires sur la réponse. La commande dans ce cas devient :
| j| t . 26
Avec : j j, |u| u v u, w G || " p 0 || p # . 27
t v t, w G || " p 0 || p # . 28
Où j, u, t . p sont des constantes ou paramètres adaptatifs en fonction des références.
Ce type de commande est difficile à mettre en œuvre car il y a un grand nombre de
paramètres à déterminer [47].
La commande SAT
Cette fonction est représentée dans la figure (IV.10), est définit comme suite :
F xyz m ;m "
m || " # . 29 s’exprime donc comme : m F . 30
C’est cette fonction qui a été utilisée pour notre recherche.
Figure IV.10 : Définition de la fonction SAT
;
;m
m
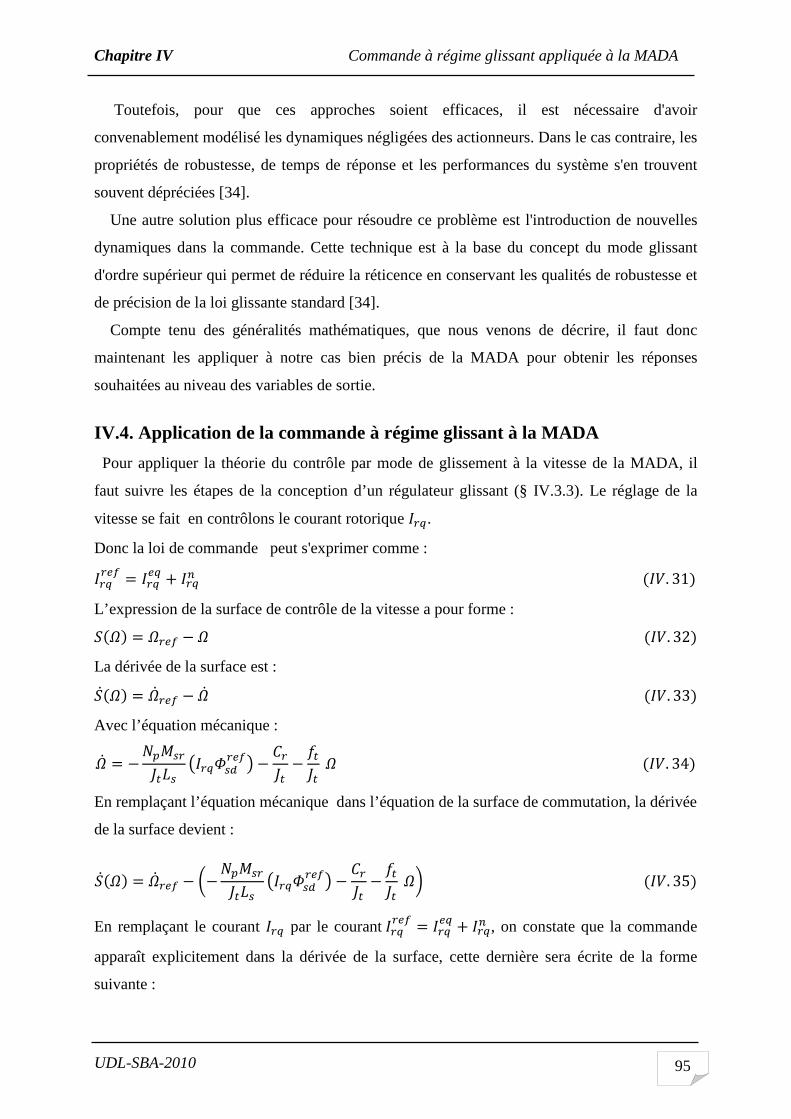
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 95
Toutefois, pour que ces approches soient efficaces, il est nécessaire d'avoir
convenablement modélisé les dynamiques négligées des actionneurs. Dans le cas contraire, les
propriétés de robustesse, de temps de réponse et les performances du système s'en trouvent
souvent dépréciées [34].
Une autre solution plus efficace pour résoudre ce problème est l'introduction de nouvelles
dynamiques dans la commande. Cette technique est à la base du concept du mode glissant
d'ordre supérieur qui permet de réduire la réticence en conservant les qualités de robustesse et
de précision de la loi glissante standard [34].
Compte tenu des généralités mathématiques, que nous venons de décrire, il faut donc
maintenant les appliquer à notre cas bien précis de la MADA pour obtenir les réponses
souhaitées au niveau des variables de sortie.
IV.4. Application de la commande à régime glissant à la MADA
Pour appliquer la théorie du contrôle par mode de glissement à la vitesse de la MADA, il
faut suivre les étapes de la conception d’un régulateur glissant (§ IV.3.3). Le réglage de la
vitesse se fait en contrôlons le courant rotorique h.
Donc la loi de commande peut s'exprimer comme : hhi h h . 31
L’expression de la surface de contrôle de la vitesse a pour forme : | |hi ; | . 32
La dérivée de la surface est : | | hi ; | . 33
Avec l’équation mécanique :
| ; ~hA h?hi ; hA ; AA | . 34
En remplaçant l’équation mécanique dans l’équation de la surface de commutation, la dérivée
de la surface devient :
| | hi ; ; ~hA h?hi ; hA ; AA | . 35
En remplaçant le courant h par le courant hhi h h , on constate que la commande
apparaît explicitement dans la dérivée de la surface, cette dernière sera écrite de la forme
suivante :
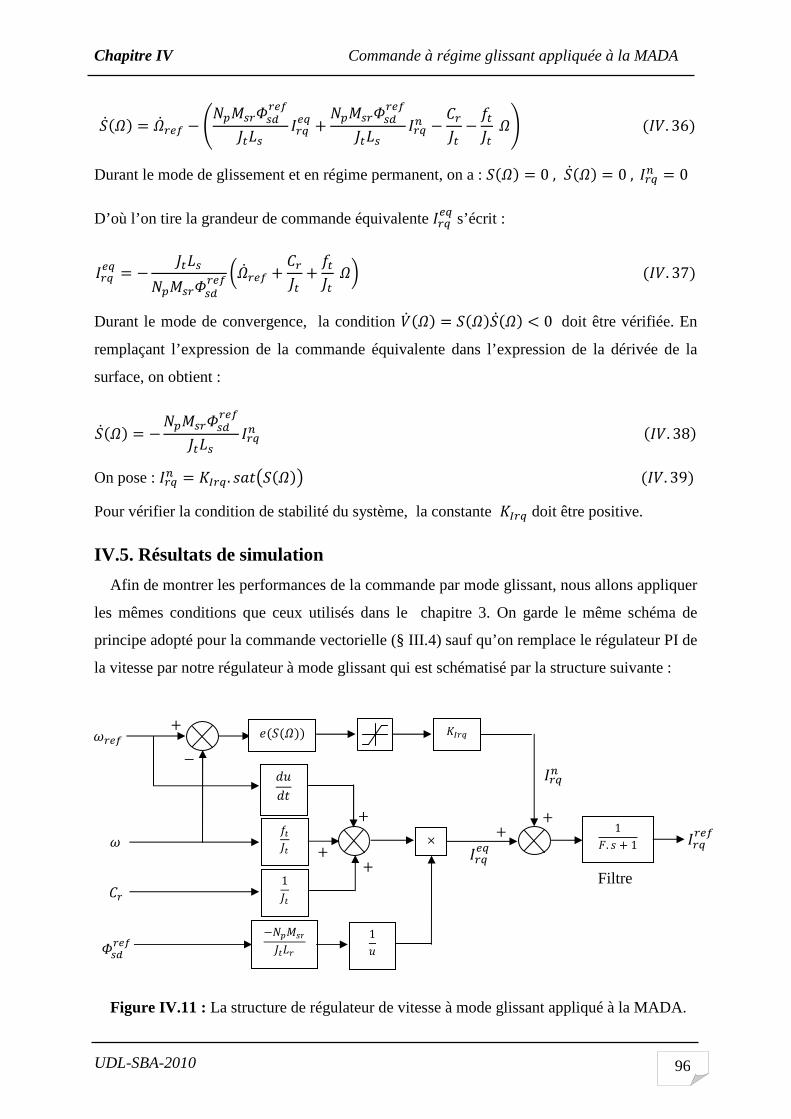
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 96
| | hi ; ~h?hiA h ~h?hi
A h ; hA ; AA | . 36
Durant le mode de glissement et en régime permanent, on a : | 0 , | 0 , h 0
D’où l’on tire la grandeur de commande équivalente h s’écrit :
h ; A~h?hi | hi hA AA | . 37
Durant le mode de convergence, la condition | | | " 0 doit être vérifiée. En
remplaçant l’expression de la commande équivalente dans l’expression de la dérivée de la
surface, on obtient :
| ; ~h?hiA h . 38
On pose : h mh. F| . 39
Pour vérifier la condition de stabilité du système, la constante mh doit être positive.
IV.5. Résultats de simulation
Afin de montrer les performances de la commande par mode glissant, nous allons appliquer
les mêmes conditions que ceux utilisés dans le chapitre 3. On garde le même schéma de
principe adopté pour la commande vectorielle (§ III.4) sauf qu’on remplace le régulateur PI de
la vitesse par notre régulateur à mode glissant qui est schématisé par la structure suivante :
Filtre
;
hhi h
h
?hi
h
hi
GfG
AA
1A
;~hAh
.| mh
1f
1. 1
Figure IV.11 : La structure de régulateur de vitesse à mode glissant appliqué à la MADA.
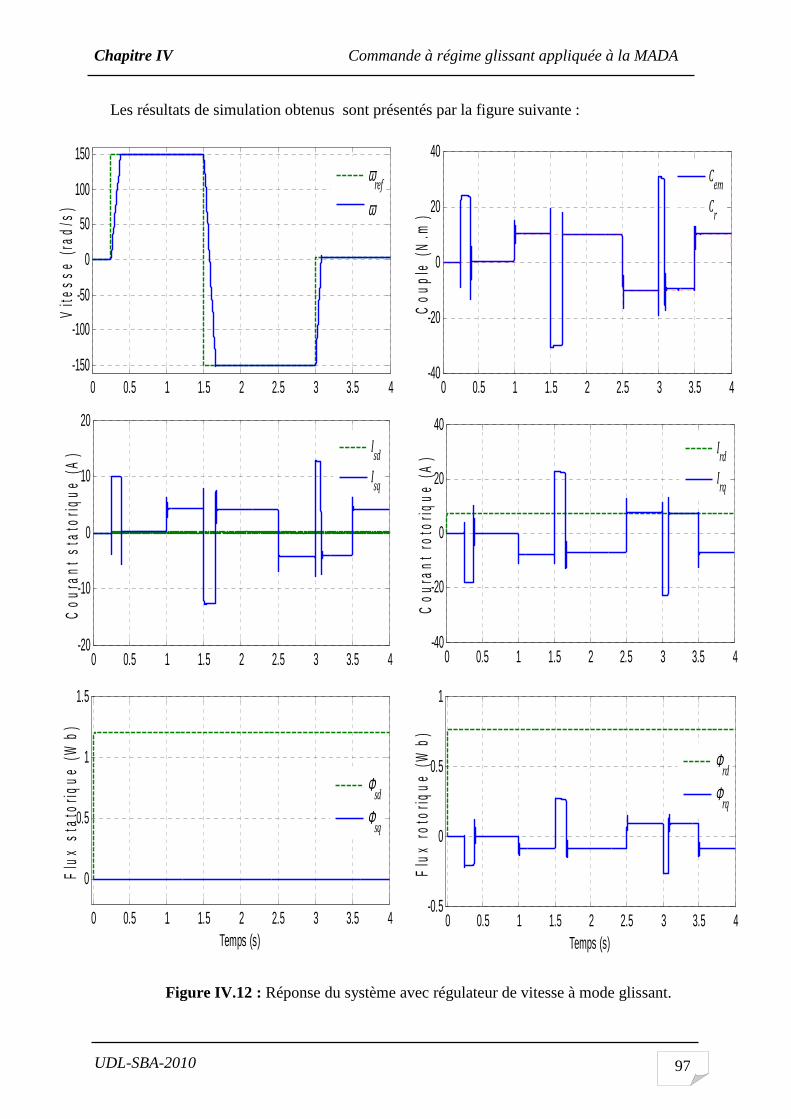
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 97
0 0.5 1 1.5 2 2.5 3 3.5 4-150
-100
-50
0
50
100
150
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3 3.5 4-40
-20
0
20
40
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-10
0
10
20
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3 3.5 4-40
-20
0
20
40C
oura
nt r
otor
ique
(A
)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Cem
Cr
Isd
Isq
Ird
Irq
Φsd
Φsq
Φrd
Φrq
ωref
ω
Les résultats de simulation obtenus sont présentés par la figure suivante :
Figure IV.12 : Réponse du système avec régulateur de vitesse à mode glissant.
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 98
Installation du flux
Nous trouvons la même réponse apériodique obtenue au chapitre III.
Démarrage de la machine
Les résultats de simulation obtenus montrent bien l’amélioration de la réponse dynamique
de la vitesse. Cette dernière atteint sa référence en un temps de réponse de 0.13 s (réponse
rapide comparativement à celle obtenue dans le cas du PI classique qui a un temps de réponse
de 0.23 s). De plus, l’allure du couple et des courants statoriques et rotoriques marquent des
pics de 24 N.m, 10 A et 17.9 A respectivement inférieurs à ceux marqués dans le cas du PI
classique qui sont de 37 N.m, 15.4 A et 27.5 A respectivement.
Application d’un couple de charge nominal
Lorsque nous adoptons la méthode de commande en vitesse par mode glissant, nous
obtenons une réponse de vitesse qui suit parfaitement la référence demandée. Nous voyons
que les impacts du couple de charge n'affectent pas la réponse en vitesse du système.
Inversion du sens de rotation de la machine :
Vu les résultats obtenus, on note que la vitesse suit sa consigne rapidement (identique au
temps de réponse au démarrage 0.13 s) comparativement au PI classique. De plus, le couple
électromagnétique et les courants statoriques et rotoriques marquent des pics de 27.8 N.m,
11.5 A et 20.7A respectivement inférieurs à ceux marqués dans le cas du PI classique qui sont
de 63.5 N.m, 26.5 A et 47.4 A respectivement.
Inversion du couple de charge à faible vitesse :
Durant cette phase nous pouvons alors citer les remarques suivantes :
Le flux reste à sa valeur de consigne durant l’inversion du couple.
Lors de l’inversion du couple, la vitesse ne chute pas et suit sa référence.
Les remarques sur le couple et les courants statoriques et rotoriques augmentent à
celles annoncées lors de l’application d’un couple nominal.
Ainsi, on peut constater l’amélioration des différentes réponses dynamiques de la machine et
l’efficacité de la commande par mode glissant.
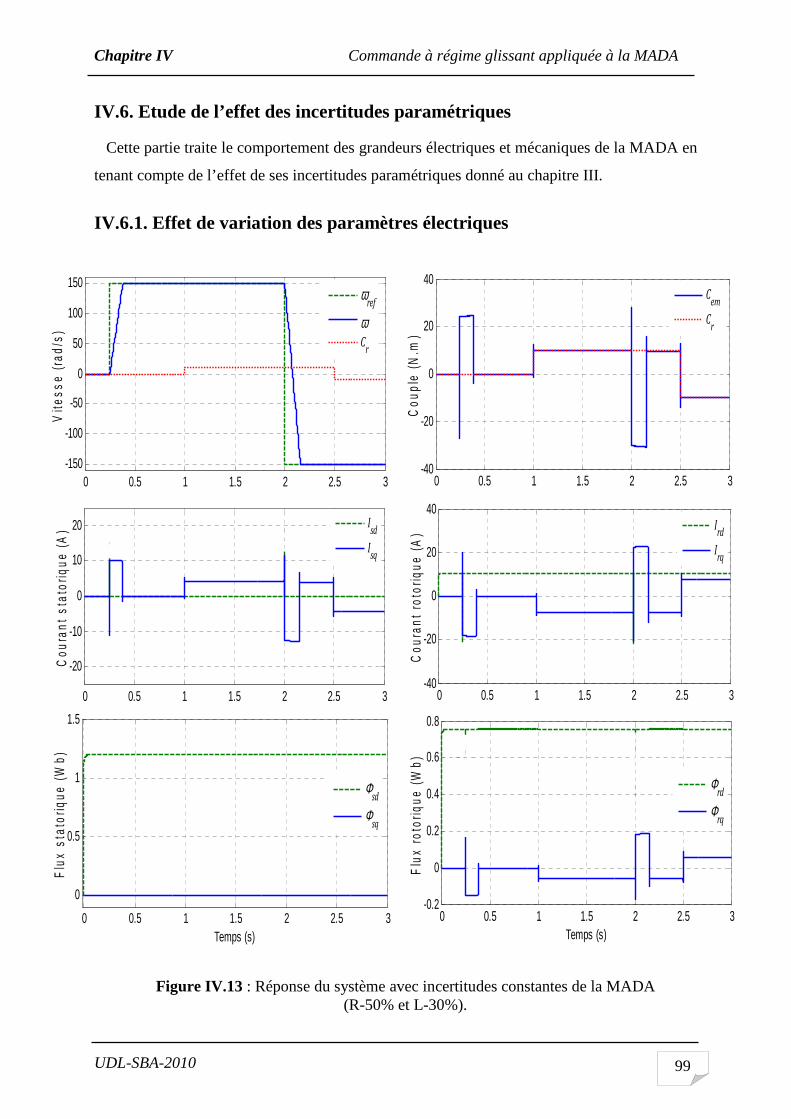
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 99
IV.6. Etude de l’effet des incertitudes paramétriques
Cette partie traite le comportement des grandeurs électriques et mécaniques de la MADA en
tenant compte de l’effet de ses incertitudes paramétriques donné au chapitre III.
IV.6.1. Effet de variation des paramètres électriques
Figure IV.13 : Réponse du système avec incertitudes constantes de la MADA
(R-50% et L-30%).
0 0.5 1 1.5 2 2.5 3-150
-100
-50
0
50
100
150
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3
-20
-10
0
10
20
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-0.2
0
0.2
0.4
0.6
0.8
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Φrd
Φrq
ωref
ωCr
Isd
Isq
Φsd
Φsq
Ird
Irq
Cem
Cr
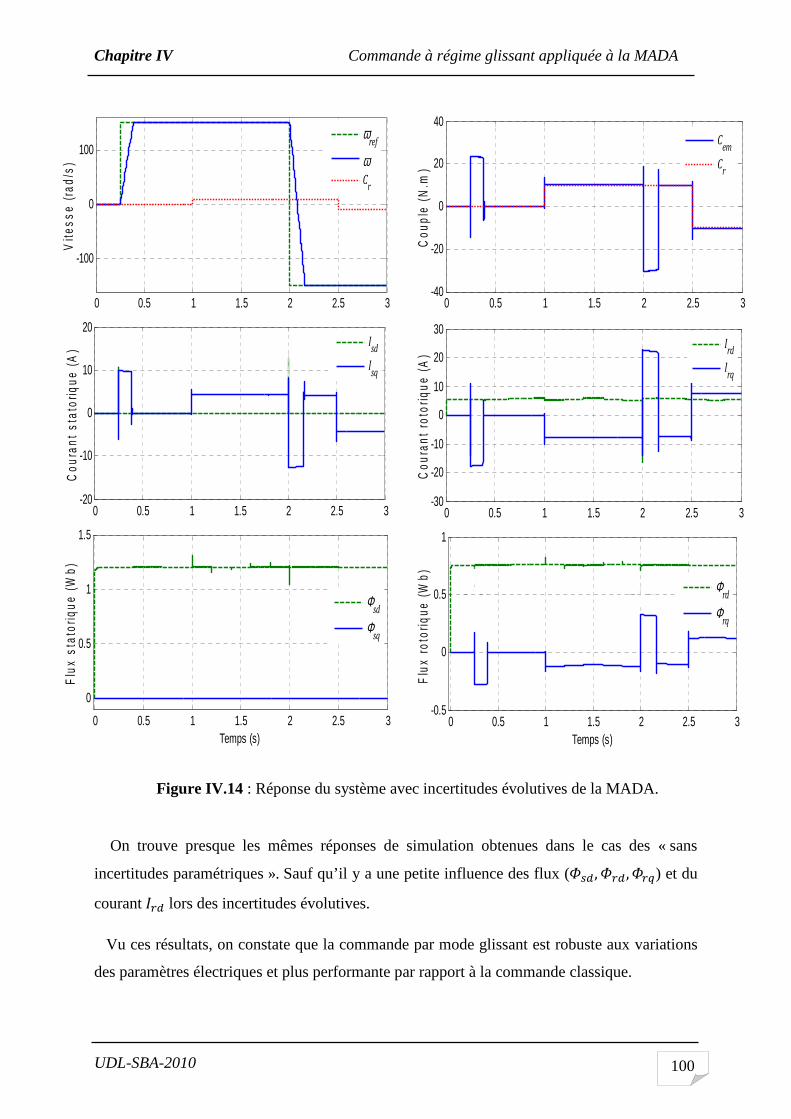
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 100
On trouve presque les mêmes réponses de simulation obtenues dans le cas des « sans
incertitudes paramétriques ». Sauf qu’il y a une petite influence des flux (?, h?, h) et du
courant h? lors des incertitudes évolutives.
Vu ces résultats, on constate que la commande par mode glissant est robuste aux variations
des paramètres électriques et plus performante par rapport à la commande classique.
Figure IV.14 : Réponse du système avec incertitudes évolutives de la MADA.
0 0.5 1 1.5 2 2.5 3
-100
0
100
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
ωref
ωCr
Cem
Cr
Isd
Isq
Φsd
Φsq
Ird
Irq
Φrd
Φrq
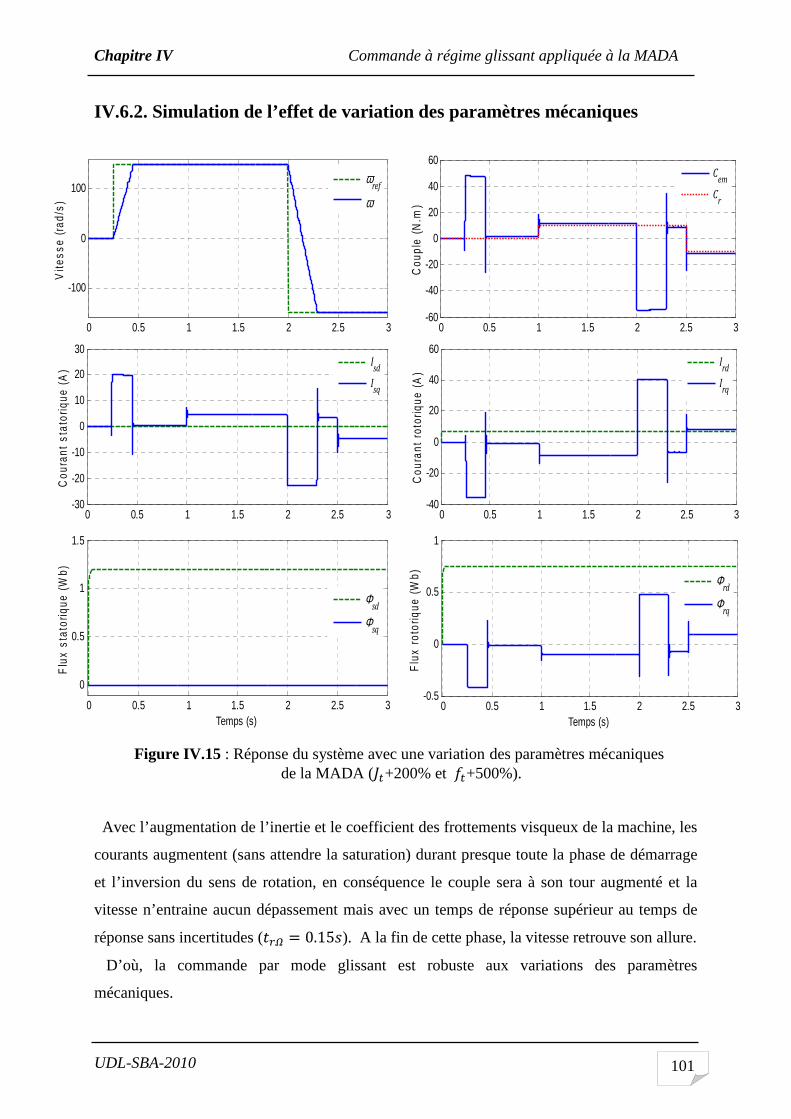
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 101
0 0.5 1 1.5 2 2.5 3
-100
0
100
Vite
sse
(rad
/s)
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
Cou
ple
(N.m
)
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
Cou
rant
sta
toriq
ue (
A)
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
60
Cou
rant
rot
oriq
ue (
A)
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
Temps (s)
Flu
x st
ator
ique
(W
b)
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
Temps (s)
Flu
x ro
toriq
ue (
Wb)
Isd
Isq
Φsd
Φsq
Cem
Cr
Ird
Irq
Φrd
Φrq
ωref
ω
IV.6.2. Simulation de l’effet de variation des paramètres mécaniques
Avec l’augmentation de l’inertie et le coefficient des frottements visqueux de la machine, les
courants augmentent (sans attendre la saturation) durant presque toute la phase de démarrage
et l’inversion du sens de rotation, en conséquence le couple sera à son tour augmenté et la
vitesse n’entraine aucun dépassement mais avec un temps de réponse supérieur au temps de
réponse sans incertitudes (h 0.15). A la fin de cette phase, la vitesse retrouve son allure.
D’où, la commande par mode glissant est robuste aux variations des paramètres
mécaniques.
Figure IV.15 : Réponse du système avec une variation des paramètres mécaniques de la MADA (A+200% et A+500%).
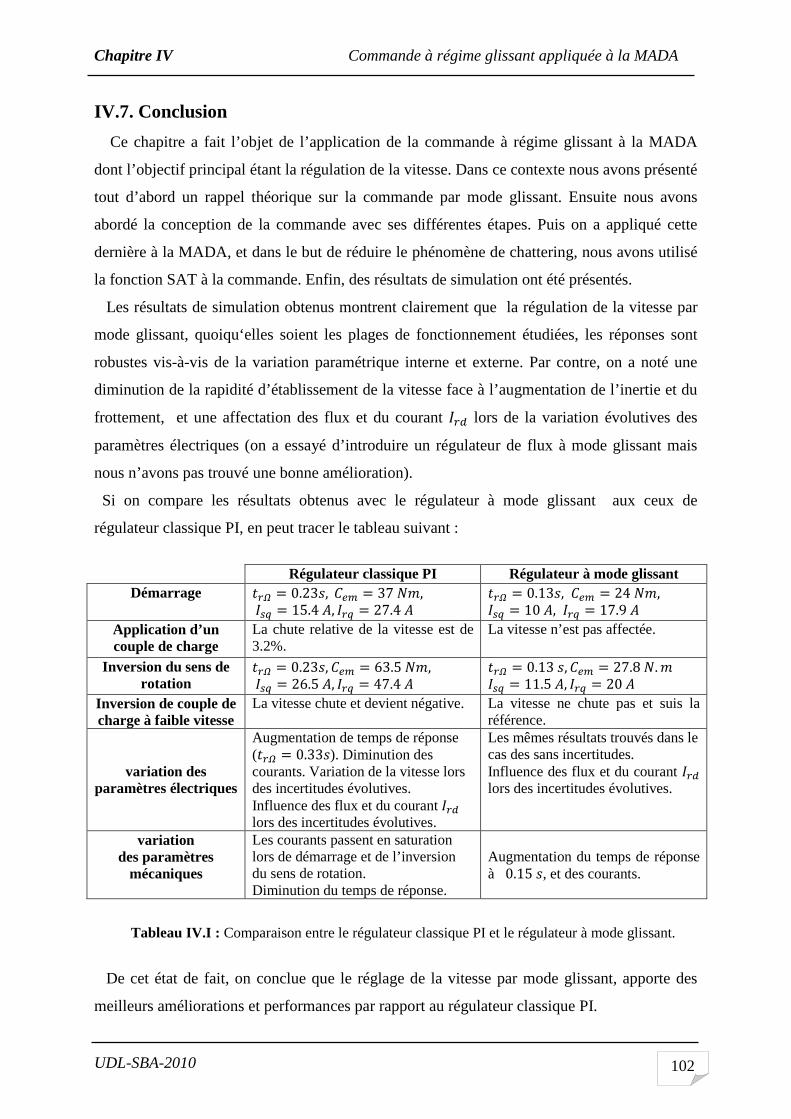
Chapitre IV Commande à régime glissant appliquée à la MADA
UDL-SBA-2010 102
IV.7. Conclusion
Ce chapitre a fait l’objet de l’application de la commande à régime glissant à la MADA
dont l’objectif principal étant la régulation de la vitesse. Dans ce contexte nous avons présenté
tout d’abord un rappel théorique sur la commande par mode glissant. Ensuite nous avons
abordé la conception de la commande avec ses différentes étapes. Puis on a appliqué cette
dernière à la MADA, et dans le but de réduire le phénomène de chattering, nous avons utilisé
la fonction SAT à la commande. Enfin, des résultats de simulation ont été présentés.
Les résultats de simulation obtenus montrent clairement que la régulation de la vitesse par
mode glissant, quoiqu‘elles soient les plages de fonctionnement étudiées, les réponses sont
robustes vis-à-vis de la variation paramétrique interne et externe. Par contre, on a noté une
diminution de la rapidité d’établissement de la vitesse face à l’augmentation de l’inertie et du
frottement, et une affectation des flux et du courant h? lors de la variation évolutives des
paramètres électriques (on a essayé d’introduire un régulateur de flux à mode glissant mais
nous n’avons pas trouvé une bonne amélioration).
Si on compare les résultats obtenus avec le régulateur à mode glissant aux ceux de
régulateur classique PI, en peut tracer le tableau suivant :
Régulateur classique PI Régulateur à mode glissant
Démarrage h 0.23, 37 8, 15.4 , h 27.4 h 0.13, 24 8, 10 , h 17.9
Application d’un couple de charge
La chute relative de la vitesse est de 3.2%.
La vitesse n’est pas affectée.
Inversion du sens de rotation
h 0.23, 63.5 8, 26.5 , h 47.4 h 0.13 , 27.8 . 8 11.5 , h 20
Inversion de couple de charge à faible vitesse
La vitesse chute et devient négative. La vitesse ne chute pas et suis la référence.
variation des paramètres électriques
Augmentation de temps de réponse (h 0.33). Diminution des courants. Variation de la vitesse lors des incertitudes évolutives. Influence des flux et du courant h? lors des incertitudes évolutives.
Les mêmes résultats trouvés dans le cas des sans incertitudes. Influence des flux et du courant h? lors des incertitudes évolutives.
variation des paramètres
mécaniques
Les courants passent en saturation lors de démarrage et de l’inversion du sens de rotation. Diminution du temps de réponse.
Augmentation du temps de réponse à 0.15 , et des courants.
De cet état de fait, on conclue que le réglage de la vitesse par mode glissant, apporte des
meilleurs améliorations et performances par rapport au régulateur classique PI.
Tableau IV.I : Comparaison entre le régulateur classique PI et le régulateur à mode glissant.
Conclusion générale
Conclusion générale
UDL-SBA-2010 103
Conclusion générale
Ce mémoire traite donc la commande en vitesse par mode glissant d’une machine
asynchrone à double alimentation à flux statorique orienté.
Notre travail commence par la modélisation de la MADA et de son alimentation. Le modèle
de la MADA repose sur les équations différentielles décrites dans le référentiel de Park.
Puis, on introduit la commande vectorielle de la MADA avec orientation de flux statorique.
La mesure des courants au stator et au rotor de cette machine nous a permis d’introduire une
nouvelle méthode de découplage des courants. Cette approche est basée sur un découplage
entrée-sortie, par retour d’état, d’un système multi-variable linéaire et non stationnaire. Les
courants ainsi découplés et régulés par retour d’état montrent une dynamique bien contrôlée
ainsi qu’une bonne robustesse vis-à-vis des variations paramétriques électrique de la machine.
Les boucles de régulation du flux et de la vitesse présentent des performances satisfaisantes
tant en régime permanent qu’en régime transitoire et pour toute une plage de variation de
vitesse. Toutefois des insuffisances ont été observées concernant la sensibilité aux
perturbations du couple de charge et à leur temps de rejet. Mais ce qui le pénalise fortement
est essentiellement sa faible robustesse vis-à-vis des variations paramétriques mécanique.
Ensuite, on expose les bases théoriques et les fondements du mode glissant, ainsi que la
structure d’une commande basée sur cette approche, puis on effectue la synthèse d’un
régulateur de vitesse à mode glissant dans l’objectif de l’intégrer dans la structure de la
commande vectorielle précédemment conçue. Grace aux simulations, qui nous ont permis de
montrer la supériorité du régulateur glissant, aussi bien dans ses comportements en poursuite
que ceux en régulation. Nous avons également observé sa robustesse surtout vis-à-vis des
perturbations de la charge traduite par des changements du couple résistant et des variations
paramétriques mécaniques. Ce qui nous a permis d’affirmer que l’approche à mode glissant
offre une excellente robustesse au contrôle vectoriel.
A partir de cette étude et des résultats de simulation obtenus, on peut tirer les conclusions
suivantes qu’on a jugées d’un intérêt de premier plan :
Conclusion générale
UDL-SBA-2010 104
Grâce au développement dans la commande électrique et l’apparition de diverses
structures des convertisseurs de l’électronique de puissance permettant à présent de
disposer de sources d’alimentation à fréquence variable, la MADA présente une
solution idéale pour les entraînements à grandes puissances.
L’étude des machines électriques en général et la MADA en particulier exige une
bonne modélisation mathématique décrivant l’ensemble de la machine et le système à
entraîner. Cela permet de prévoir les performances dynamiques et statiques de ses
entraînements.
La technique de la commande vectorielle appliquée à la MADA peut maitriser la
difficulté de son réglage. Elle permet d’assurer le découplage entre le flux et le couple
électromagnétique et améliore la dynamique de la vitesse. L’association de la
commande vectorielle à régulateur de vitesse de type PI classique permet d’obtenir
une bonne performance. Mais ce dernier peut perdre sa robustesse vis-à-vis de la
perturbation extérieure et la variation paramétrique mécanique.
Le mode glissant, caractérisé par sa robustesse, a été exploité pour construire un
régulateur glissant de vitesse de la MADA. L’approche de la commande glissant
proposée a été justifiée par les résultats de simulation et les performances obtenus.
Une comparaison avec les résultats obtenus par le PI classique a montré l’amélioration
des performances dynamiques. Ce qui rend le régulateur glissant un choix acceptable
pour les systèmes d’entraînement nécessitant des réglages rapides, précis et moins
sensibles aux perturbations extérieures et aux variations paramétriques électriques et
mécaniques.
Le travail, présenté dans ce mémoire, amène à soulever les perspectives de recherche
suivantes:
Les conditions de déroulement de notre mémoire nous ont obligés à limiter notre
travail à une étude théorique et à des résultats de simulation. Il serait donc intéressant
de tester, sur un banc expérimental, la validité des algorithmes proposés dans ce travail
surtout ceux dédiés au découplage, à la commande par mode glissant.
Utiliser des techniques adaptatives pour augmenter les performances de la commande
en vitesse par mode glissant de la MADA.
Utiliser d’autres types de convertisseurs de fréquence, tel que les cycloconvertisseurs
et les convertisseurs matriciels adaptés aux grandes puissances
Etudier la MADA associée à d’autres stratégies de commande.
Annexe
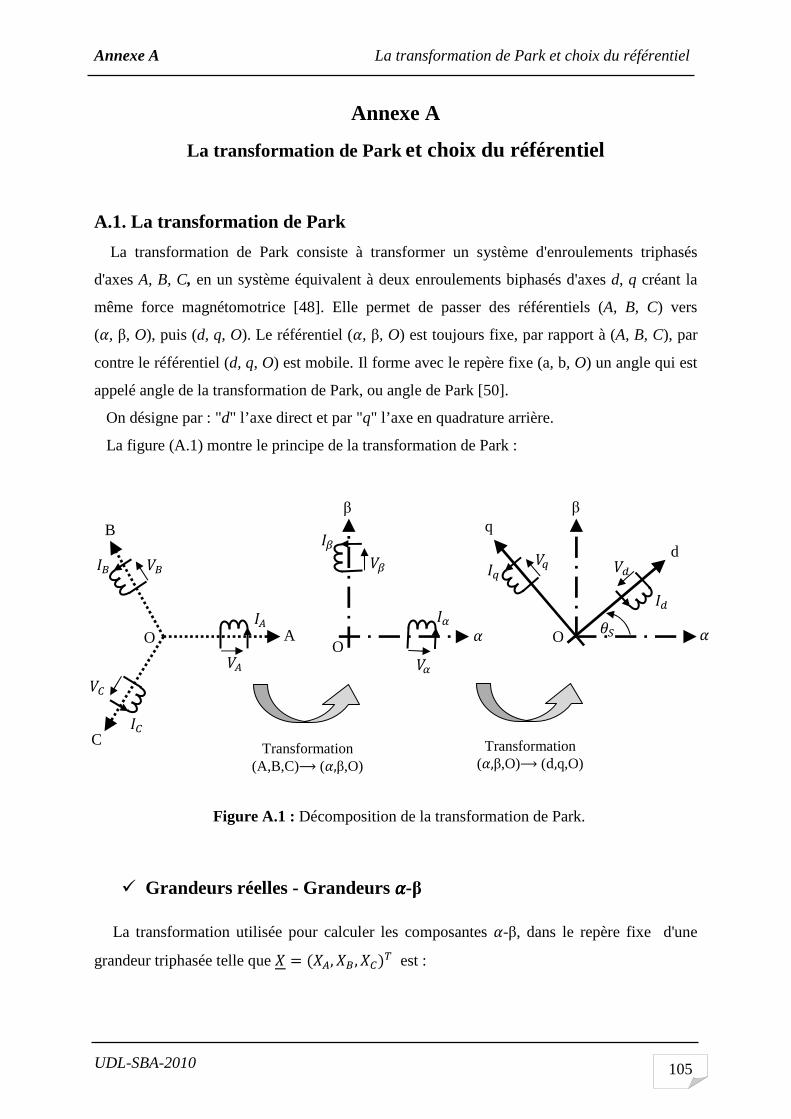
Annexe A La transformation de Park et choix du référentiel
UDL-SBA-2010 105
Annexe A
La transformation de Park et choix du référentiel
A.1. La transformation de Park
La transformation de Park consiste à transformer un système d'enroulements triphasés
d'axes A, B, C, en un système équivalent à deux enroulements biphasés d'axes d, q créant la
même force magnétomotrice [48]. Elle permet de passer des référentiels (A, B, C) vers
(, β, O), puis (d, q, O). Le référentiel (, β, O) est toujours fixe, par rapport à (A, B, C), par
contre le référentiel (d, q, O) est mobile. Il forme avec le repère fixe (a, b, O) un angle qui est
appelé angle de la transformation de Park, ou angle de Park [50].
On désigne par : "d" l’axe direct et par "q" l’axe en quadrature arrière.
La figure (A.1) montre le principe de la transformation de Park :
Grandeurs réelles - Grandeurs -β
La transformation utilisée pour calculer les composantes -β, dans le repère fixe d'une
grandeur triphasée telle que , , est :
O
C
B
A
β
O
q
d
β
O
Transformation (A,B,C) (,β,O)
Transformation (,β,O) (d,q,O)
Figure A.1 : Décomposition de la transformation de Park.

Annexe A La transformation de Park et choix du référentiel
UDL-SBA-2010 106
23
1 0.5 0.5
0 √32 √321√2 1√2 1√2 %&&&'
() *. 1
La transformation inverse peut donc être obtenue et s'écrit :
() 32
23 0 √23 13 1√3 √23 13 1√3 √23 %&
&&&&'
*. 2
Grandeurs -β - Grandeurs d-q
La transformation des grandeurs diphasées du repère fixe alpha - beta vers le repère tournant d - q s'exprime par :
+, + cos sin sin cos , + , *. 3
est l'angle entre le repère diphasé fixe et le repère tournant d - q. La transformation inverse
qui permet de passer de variables exprimées dans le repère diphasé d - q vers des variables
exprimées dans le repère alpha - beta est :
+ , +cos sin sin cos , +, *. 4
Synthèse
Nous avons adopté pour ce mémoire une définition des angles et des repères illustrée sur la
figure A.2.
L'expression liant les angles 3, 4 56 entre eux est : 7 8 *. 5
Par conséquent, les grandeurs seront exprimés dans le repère d-q suivant :
• pour les grandeurs statoriques : 9 9 5:;<= *. 6 • pour les grandeurs rotoriques : 7 7 5:;<? *. 7
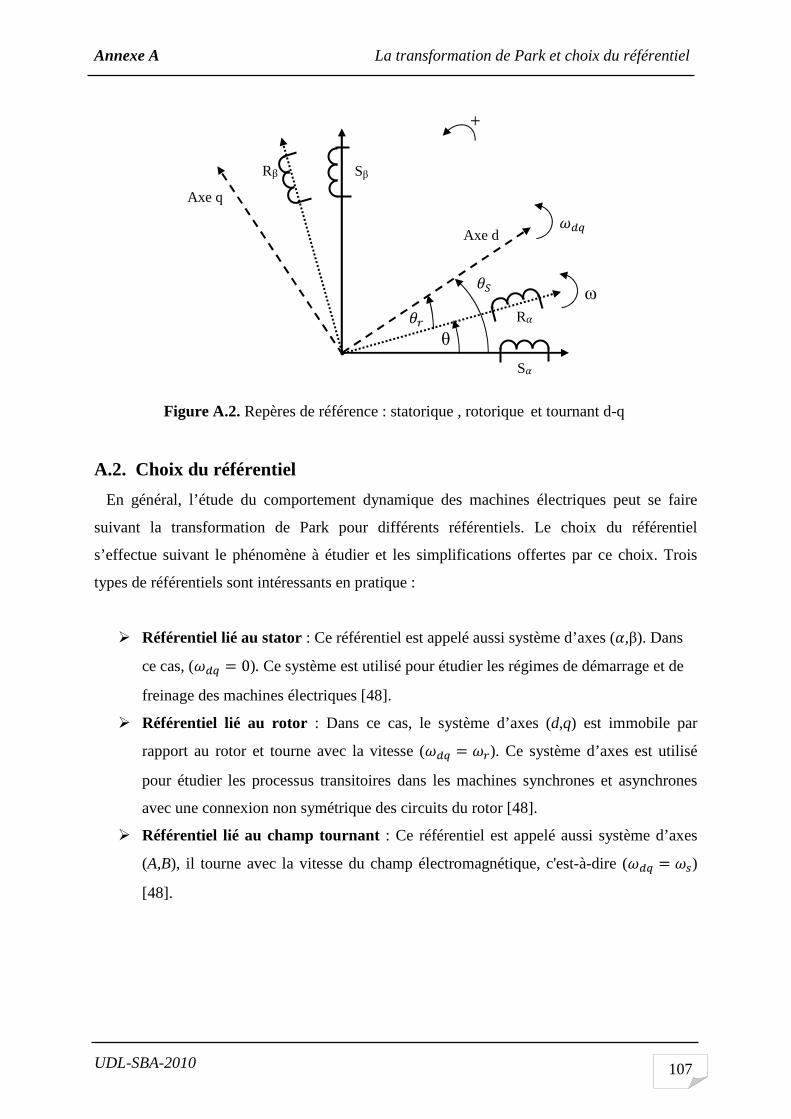
Annexe A La transformation de Park et choix du référentiel
UDL-SBA-2010 107
A.2. Choix du référentiel
En général, l’étude du comportement dynamique des machines électriques peut se faire
suivant la transformation de Park pour différents référentiels. Le choix du référentiel
s’effectue suivant le phénomène à étudier et les simplifications offertes par ce choix. Trois
types de référentiels sont intéressants en pratique :
Référentiel lié au stator : Ce référentiel est appelé aussi système d’axes (,β). Dans
ce cas, (A 0). Ce système est utilisé pour étudier les régimes de démarrage et de
freinage des machines électriques [48].
Référentiel lié au rotor : Dans ce cas, le système d’axes (d,q) est immobile par
rapport au rotor et tourne avec la vitesse (A A7). Ce système d’axes est utilisé
pour étudier les processus transitoires dans les machines synchrones et asynchrones
avec une connexion non symétrique des circuits du rotor [48].
Référentiel lié au champ tournant : Ce référentiel est appelé aussi système d’axes
(A,B), il tourne avec la vitesse du champ électromagnétique, c'est-à-dire (A A9)
[48].
θ 7
Axe q
Rβ Sβ
Axe d
R
S
ω
A
+
Figure A.2. Repères de référence : statorique , rotorique et tournant d-q
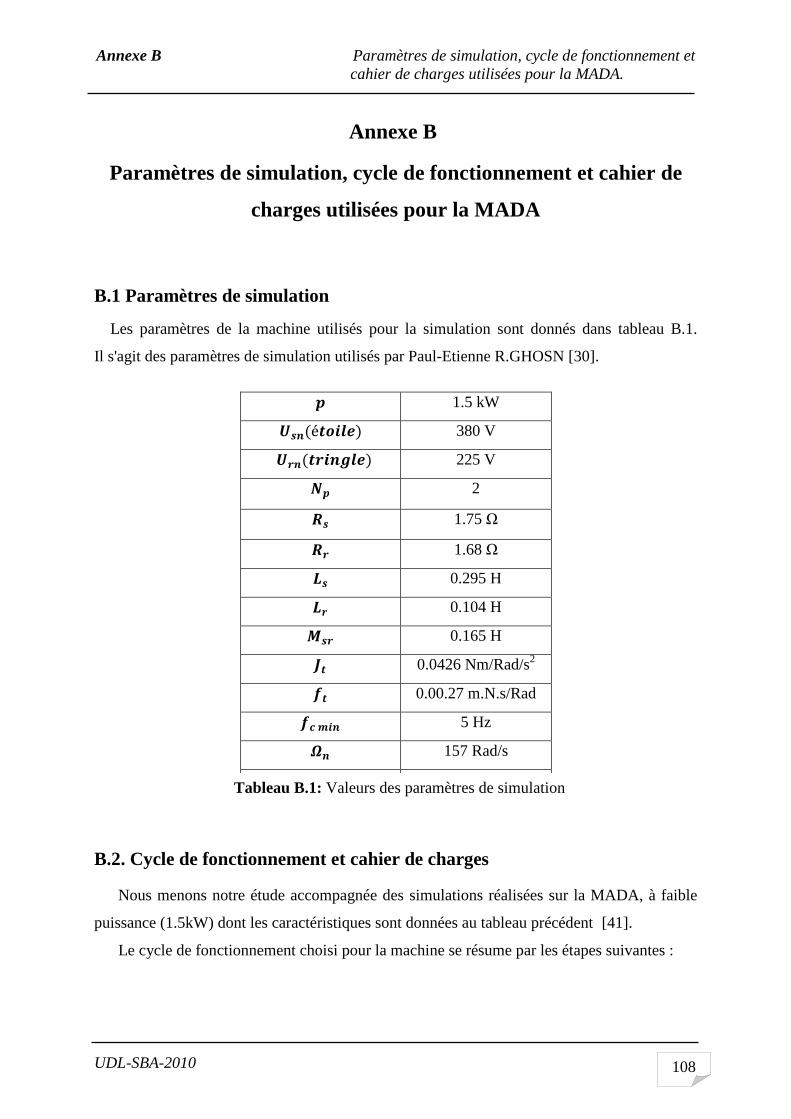
Annexe B Paramètres de simulation, cycle de fonctionnement et c a h cahier de charges utilisées pour la MADA.
UDL-SBA-2010 108
Annexe B
Paramètres de simulation, cycle de fonctionnement et cahier de
charges utilisées pour la MADA
B.1 Paramètres de simulation
Les paramètres de la machine utilisés pour la simulation sont donnés dans tableau B.1.
Il s'agit des paramètres de simulation utilisés par Paul-Etienne R.GHOSN [30].
B.2. Cycle de fonctionnement et cahier de charges
Nous menons notre étude accompagnée des simulations réalisées sur la MADA, à faible
puissance (1.5kW) dont les caractéristiques sont données au tableau précédent [41].
Le cycle de fonctionnement choisi pour la machine se résume par les étapes suivantes :
1.5 kW
é 380 V
225 V
2
1.75 Ω
1.68 Ω
0.295 H
0.104 H
0.165 H
0.0426 Nm/Rad/s2
0.00.27 m.N.s/Rad
5 Hz
157 Rad/s
2π50 Hz Tableau B.1: Valeurs des paramètres de simulation
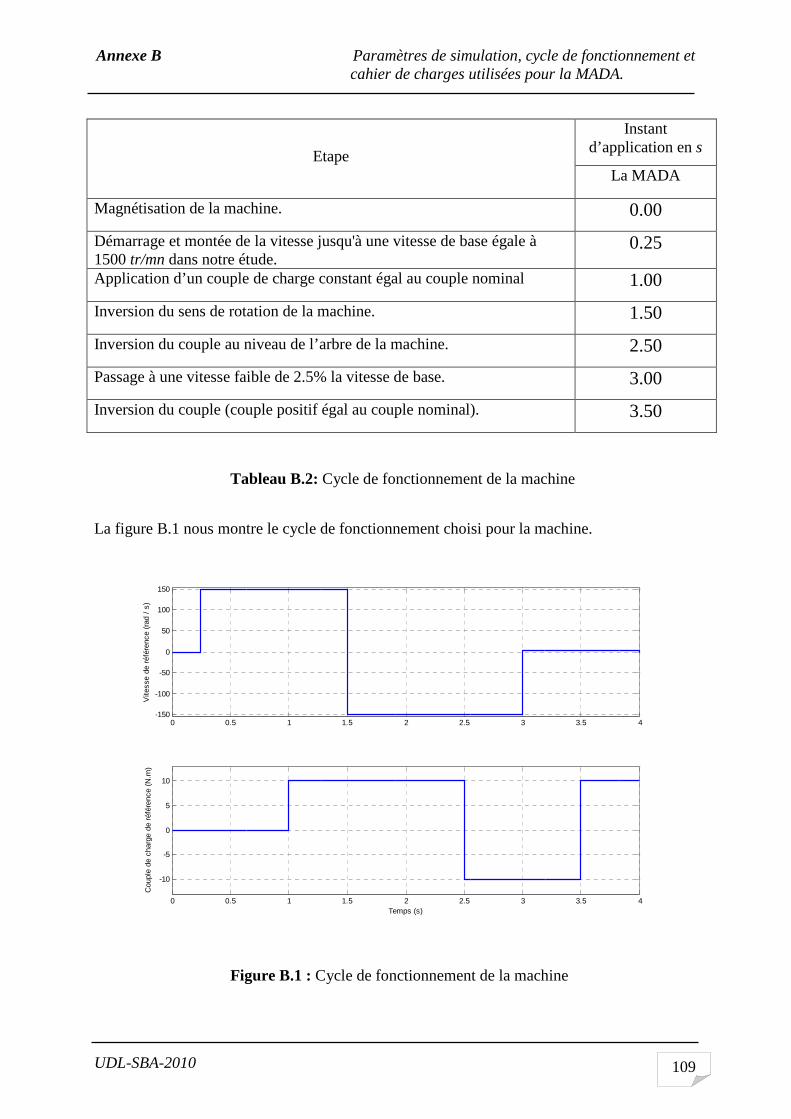
Annexe B Paramètres de simulation, cycle de fonctionnement et c a h cahier de charges utilisées pour la MADA.
UDL-SBA-2010 109
0 0.5 1 1.5 2 2.5 3 3.5 4-150
-100
-50
0
50
100
150
Vite
sse
de r
éfér
ence
(ra
d /
s)
0 0.5 1 1.5 2 2.5 3 3.5 4
-10
-5
0
5
10
Temps (s)
Cou
ple
de c
harg
e de
réf
éren
ce (
N.m
)
Etape
Instant d’application en s
La MADA
Magnétisation de la machine. 0.00
Démarrage et montée de la vitesse jusqu'à une vitesse de base égale à 1500 tr/mn dans notre étude.
0.25
Application d’un couple de charge constant égal au couple nominal 1.00
Inversion du sens de rotation de la machine. 1.50
Inversion du couple au niveau de l’arbre de la machine. 2.50
Passage à une vitesse faible de 2.5% la vitesse de base. 3.00
Inversion du couple (couple positif égal au couple nominal). 3.50
La figure B.1 nous montre le cycle de fonctionnement choisi pour la machine.
Figure B.1 : Cycle de fonctionnement de la machine
Tableau B.2: Cycle de fonctionnement de la machine
Annexe B Paramètres de simulation, cycle de fonctionnement et c a h cahier de charges utilisées pour la MADA.
UDL-SBA-2010 110
Nous donnons ci-après un cahier de charges [41]:
1. Réponse en vitesse :
a. Pas d’erreur statique.
b. Dépassement (pu) x durée du dépassement = .0025 x s.
c. Accélération admissible : dépend de l’inertie et de l’application.
2. Couple de charge :
a. constant de 0 à la vitesse maximale.
b. constant de 0 à la vitesse de base puis inversement proportionnel à la vitesse jusqu'à la
vitesse maximale.
3. Variation de vitesse suite à un impact de couple nominal :
Erreur de vitesse max (pu) x temps de rétablissement = 0.0025s.
4. Variation dynamique du couple : 250 !"/$
5. Surcharge des variateurs en courant : Aucune surcharge en régime permanent. En tant que concepteur de commande, nous pouvons dire que notre système est de type
cascade et il comprendra trois niveaux de boucles de régulation :
Les boucles de régulation des courants : elles sont les boucles les plus rapides dans
notre système.
La boucle de régulation du flux : c’est une boucle intermédiaire.
La boucle de régulation de la vitesse : c’est la boucle la plus lente dans la chaîne.
Pour n’importe quel réglage nous cherchons à vérifier les contraintes suivantes :
Avoir un temps de réponse inférieur, dans un rapport raisonnable, à celui donné par le
système en boucle ouverte.
Eviter, autant que possible, la saturation du correcteur.
Garder des marges de stabilité suffisantes pour le système.
Avoir une erreur nulle en régime permanent.
Rejet des perturbations en régime permanent et effet minime en régime transitoire.
Les boucles internes doivent être plus rapides que les boucles externes.
En examinant les fonctions de transfert liants les courants aux tensions aux bornes de la
machine, nous remarquons l’existence de deux constantes de temps (Ces constantes de temps
dépendent du modèle utilisé pour l’étude de la machine) :

Annexe B Paramètres de simulation, cycle de fonctionnement et c a h cahier de charges utilisées pour la MADA.
UDL-SBA-2010 111
• % & ' : constante de temps électrique propre au stator.
• % & ' : constante de temps électrique propre au rotor.
Il faut que la constante de temps des fonctions de transfert des courants, en boucles fermées,
corrigées soit inférieure à la constante de temps du système en boucle ouverte.
D’autre part, l’accélération maximale de la partie tournante du moteur est donnée par :
()*)+ ,
-./& !-./
0" 1. 1
Ceci nous permet de calculer le temps de réponse minimal du moteur :
+4-5" & 0"*6!-./
1. 2
Il faut que le temps de réponse en vitesse soit inférieur au temps de réponse du moteur en
boucle ouverte et supérieur à +4-5" donné par l’expression (B.2).
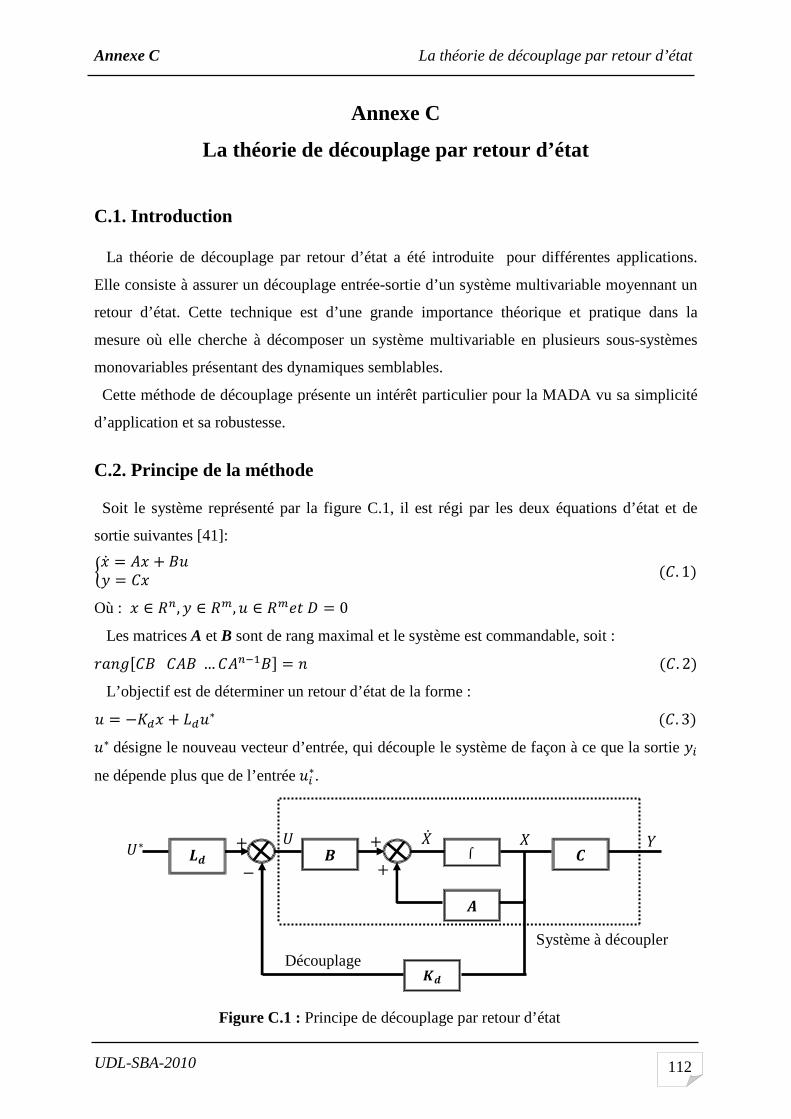
Annexe C La théorie de découplage par retour d’état
UDL-SBA-2010 112
Annexe C
La théorie de découplage par retour d’état
C.1. Introduction La théorie de découplage par retour d’état a été introduite pour différentes applications.
Elle consiste à assurer un découplage entrée-sortie d’un système multivariable moyennant un
retour d’état. Cette technique est d’une grande importance théorique et pratique dans la
mesure où elle cherche à décomposer un système multivariable en plusieurs sous-systèmes
monovariables présentant des dynamiques semblables.
Cette méthode de découplage présente un intérêt particulier pour la MADA vu sa simplicité
d’application et sa robustesse.
C.2. Principe de la méthode Soit le système représenté par la figure C.1, il est régi par les deux équations d’état et de
sortie suivantes [41]:
. 1
Où : , , 0
Les matrices A et B sont de rang maximal et le système est commandable, soit :
… !" . 2
L’objectif est de déterminer un retour d’état de la forme :
$%& '&( . 3
( désigne le nouveau vecteur d’entrée, qui découple le système de façon à ce que la sortie *
ne dépende plus que de l’entrée *(.
Figure C.1 : Principe de découplage par retour d’état
+ , ,
-
$
-(
Découplage Système à découpler
./ 0 1
2
3/
4

Annexe C La théorie de découplage par retour d’état
UDL-SBA-2010 113
Les équations d’état et de sortie du système découplé s’écrivent :
$ %& '&( . 4
et sa matrice de transfert :
6 7 78 $ $ %& ! '& . 5
Il faut déterminer alors %& et '& telles que cette matrice de transfert soit diagonale.
Notons * la :é< ligne de la matrice . La commandabilité de la :é<
sortie * s’exprime
sous la forme :
* * … * !" 1 . 6
Le vecteur de sortie étant commandable, il en est de même pour la sortie *. Alors : > : ?1 … @A, BC* ?0 1 … $ 1A / 1E2FE 0 G 0 . 7
Et >I J , I K C* , 1E2L 0 0
En dérivant chaque sortie jusqu’à l’ordre C* 1 et en les écrivant sous forme matricielle,
nous aurons :
M N $ N%& M'&( . 8
Avec :
M
PQQQQR !
STU!
V*
SWU!
V
SXU!YZZZZ[ M
PQQQR !STU!
V*SWU!
VSXU!Y
ZZZ[ M
PQQQR !ST
V*SW
VSXY
ZZZ[
. 9
Si la matrice N est inversible, le choix de :
%& N !M '& N ! . 10
Donne : M (.
Soit :
* 7 17SWU! -*( 7 . 11
Références
bibliographiques
Références bibliographiques
UDL-SBA-2010 114
Références bibliographiques
OUVRAGE
[1] H. A. Toliyat et G. B. Kliman, « Handbook Of Electric Motors », second edition, Taylor
& Francis Group, USA 2004.
[2] J-P. Louis, « Modélisation Des Machines Electriques En Vue De Leur Commande »,
LAVOISIER, Paris, 2004.
[3] M. Marty, D. Dixneuf et D. G. Gilbert, « Principe De L’électrotechnique », DUNOD,
Paris, 2005.
[4] T. Wildi et G. Sybille : « Électrotechnique », 4ème édition, Canada 2005.
[5] G. Seguier, « Convertisseurs De l’Electronique De Puissance: La Conversion
Alternative-Continue », vol.1, 3éme éditons, Technique et Documentation Lavoisier, Paris,
2006.
[6] P. Mayé, « Aide Mémoire Electrotechnique », DUNOD, Paris, 2006.
[7] M. Pinard, « Convertisseurs Et Electronique De Puissance », DUNOD, Paris, 2006.
[8] G. Chateigner, M. Boës, D. Bouix, J. Vaillant et D. Verkindère, « Manuel De Génie
Electrique », DUNOD, Paris, 2006.
[9] P. Lopez et A. S. Nouri, « Théorie Elémentaire Et Pratique De La Commande Par Les
Régimes Glissants », Springer, 2006.
[10] B. Robyns, B. François, Ph. Degobert et J-P. Hautier, « Commande vectoriel de la
Machine asynchrone », Edition TECHNIP, Paris, 2007.
[11] N. P. Quang et J-A. Dittrich, « Vector Control of Three-Phase AC Machines »,
Springer, 2008.
[12] G. Bartolini, L. Fridman, A. Pisano et E. Usai, « Modern Sliding Mode Control
Theory ». Springer, 2008
Références bibliographiques
UDL-SBA-2010 115
ARTICLES
[13] B. De Fornel, « Alimentation des machines asynchrones », Techniques de l’Ingénieur,
Traité Génie Electrique, D 3 620, 1990.
[14] D. Lecocq, Ph. Lataire et W. Wymeersch, « Application of the Double Fed
Asynchronous Motor (DFAM) in variable speed drives », The European Power Electronics
Association, pp: 419-423, 1993.
[15] Y. Liao, « Design of a brushless doubly-fed induction motor for adjustable speed drive
applications », IEEE, pp: 850-855, 1996.
[16] B. Hopfenspeger et D.J.Atkinson, « Doubly-fed a.c. machines: classification and
comparison », European Conference on Power. Electronics And Applications (EPE), Gras,
2001.
[17] B. Hopfensperger, D.J. Atkinson et R.A. Lakin, « Steady state of the cascaded doubly-
fed induction machine », ETEP vol. 12, No. 6, pp: 427-437, 2002.
[18] D. forchetti, G. garcia et M. I. valla, «Vector control strategy for a doubly-fed stand-
alone induction generator vector », IEEE Trans .Energy conversion, pp: 991-995, 2002.
[19] S. Peresada, A. Tilli et A. Tonielli, « Power control of a doubly fed induction machine
via output feedback », Control Engineering Practice 12, Elsevier Science, pp : 41–57 , 2003.
[20] M. S. Vicatos et A. J. Tegopoulos, « A doubly-fed induction machine differential drive
model for automobiles », IEEE Transactions on Energy Conversion, vol. 18, No. 2, pp. 225-
230, June 2003.
[21] P-E. Vidal et M. Pietrzak-David, « Flux sliding mode control of a doubly fed induction
machine », IEEE, pp: 1-10, 2005.
[22] S. Drid, M. S. Nait-Said et M. Tadjine, « Double flux oriented control for the doubly
fed induction motor », Electric Power Components and Systems, pp: 1081–1095, Taylor &
Francis, 2005.
[23] S. Khojet El Khil, I. Slama-Belkhodja, M. Pietrzak-David et B. De Fornel,
« Sensorless field oriented control of doubly fed induction speed drive », IEEE, The
International Conference on “Computer as a Tool”, pp: 9-12, 2007.
Références bibliographiques
UDL-SBA-2010 116
[24] B. De Fornel, «Machines asynchrones : alimentation et caractéristiques », Techniques de
l’Ingénieur, traité Génie électrique, D 3 620, 2008.
[25] F. Ben Ammar, «Machines asynchrones a contrôle vectoriel de flux», Techniques De
l’Ingénieur, Traité Génie Electrique, D 3563, 2008.
[26] M. Abdellatif, M. Pietrzak-David et I. Slama-Belkhodja, « Sensitivity of the currents
input-output decoupling vector control of the dfim versus current sensors fault ». IEEE, “13 th
International Power Electronics and Motion Control Conference”, pp: 938-944, 2008.
[27] D. P. Cashman, J. G. Hayes et M. G. Egan, « Comparison of test methods for
characterisation of a doubly-fed induction machine », IEEE, pp: 1-8, 2008.
[28] A.L. Nemmour, R. Abdessemed , A. Khezzar, L. Louze et M. Boucherma, « The
input-output linearizing control scheme for a doubly-fed induction motor drive », IEEE,
International Conference on Electrical Machines, pp: 8 – 13, 2008.
[29] Y. Bekakra et D. Ben Attous, « A Sliding Mode speed and flux control of a doubly fed
induction machine », IEEE, pp: 174 - 178, 2009.
THESES [30] R. Ghosn, « Contrôle vectoriel de la machine asynchrone a rotor bobiné a double
alimentation », Thèse de Doctorat en Génie Électrique, Institut National Polytechnique de
Toulouse, France, 2001.
[31] F. Javier, « Modélisation, conception et commande d’une machine sans balais
doublement alimentée pour la génération a vitesse variable », Thèse de Doctorat en Génie
Électrique, Institut National Polytechnique de Grenoble, France, 2003.
[32] F. Poitiers, « Etude et commande de génératrices asynchrones pour l'utilisation de
l'energie eolienne : machine asynchrone à cage autonome, machine asynchrone à double
alimentation reliée au réseau », Thèse de Doctorat en Electronique et Génie Electrique, Ecole
Polytechnique de l'Université de Nantes, France, 2003.
Références bibliographiques
UDL-SBA-2010 117
[33] P-E. Vidal, « Commande non-linéaire d'une machine asynchrone à double
alimentation », Thèse de doctorat en Génie Electrique, Institut National Polytechnique de
Toulouse, France, 2004.
[34] T. S. Jimenez, « Contribution a la commande d'un robot sous-marin autonome de type
torpille », Thèse de doctorat en Génie Informatique, Automatique et Traitement du Signal,
Université Montpellier II, France, 2004.
[35] M. Abid, « Adaptation de la commande optimisée au contrôle vectoriel de la machine
asynchrone alimentée par onduleur à MLI », Thèse de doctorat d'état en Electrotechnique,
Université Djillali Liabes De Sidi Bel-Abbès, Algérie, 2009.
[36] S. Drid, « Contribution à la modélisation et à la commande robuste d’une machine à
induction double alimentée à flux orienté avec optimisation de la structure d’alimentation :
théorie et expérimentation », Thèse de Doctorat en Electrotechnique, Université de Batna,
Algérie, 2005.
[37] F. Nollet, « Lois de commande par modes glissants du moteur pas a pas », Thèse de
Doctorat en Automatique Et Informatique Industrielle, l'Ecole Centrale de Lille et l'Université
des Sciences et Technologies de Lille, France, 2006.
[38] A. Doria-Cerezo, « Modeling, simulation and control of a doubly-fed induction machine
controlled by a back-to-back converter », PhD Thesis, Universitat Politecnica de Catalunya,
2006.
[39] A. Boyette, « Contrôle-commande d’un générateur asynchrone a double alimentation
avec système de stockage pour la production éolienne », Thèse de doctorat en génie
électrique, Université Henri Poincaré, Nancy I, 11, France, 2006.
[40] S. Khojet El Khil, « Commande vectorielle d’une Machine Asynchrone Doublement
Alimentée (MADA) », Thèse de doctorat, Institut National Polytechnique de Toulouse &
école Nationale d’Ingénieurs de Tunis, 2006.
[41] G. Salloum, « Contribution à la commande robuste de la machine asynchrone à double
alimentation », Thèse de Doctorat en Génie Électrique, Institut National Polytechnique de
Toulouse, France, 2007.
Références bibliographiques
UDL-SBA-2010 118
[42] A. Dendouga, « Contrôle des puissances actives et réactive de la machine asynchrone a
double alimentation (DFIM) », Thèse De Doctorat En Science En Electrotechnique,
Université de Batna, Algérie, 2010.
[43] L. Benalia, « Commande en tension des moteurs a induction double aliments », Thèse
De Doctorat En Science En Electrotechnique, Université de Batna, Algérie, 2010.
MEMOIRES
MAGISTERS
[44] F. Benchabane, « Commande en position et en vitesse par mode de glissement d’un
moteur synchrone triphasé a aimants permanents avec minimisation du chattring », Mémoire
De Magistère En Electrotechnique, Universite Mohammed Khider De Biskra, Algérie, 2005.
[45] R. Azaizia, « Etude et commande d’une machine asynchrone a double alimentation
alimentée par un convertisseur multiniveaux », Mémoire De Magistère En Génie Electrique,
Universite Mohamed Bougara, Boumerdes, Algérie, 2008.
[46] H. Amimeur, « Contribution à la commande d’une machine asynchrone double étoile
par mode de glissement », Mémoire De Magistère En Electrotechnique, Université de Batna,
Algérie, 2008.
[47] B. Benazza, « Commande par mode glissant d’une machine asynchrone sans capteur de
vitesse », Mémoire De Magistère En Electrotechnique, Université Djillali Liabes De Sidi Bel-
Abbès, Algérie, 2008.
[48] Y. Elbia, « Commande floue optimisée d’une machine asynchrone a double
alimentation et a flux orienté », Mémoire De Magistère En Electrotechnique, Université de
Batna, Algérie, 2009.
[49] F. Boumaraf, « Commande intelligent d’une association convertisseur statique machine
asynchrone a double alimentation », Mémoire De Magistère En Electrotechnique, Université
de Batna, Algérie, 2009.
[50] Z. Boudjemaa, « Commande vectorielle sans capteur de vitesse de la machine
asynchrone a double alimentation par régulateur PI-Flou », Mémoire De Magistère En
Electrotechnique, Ecole Normale Supérieure De L’enseignement Technologique D’Oran,
Algérie, 2009.
Références bibliographiques
UDL-SBA-2010 119
PFEs
[51] K. Azzouz et S. Chemouri, « contribution à l’étude du comportement de la machine
asynchrone double alimentation commandée par un onduleur de tension MLI », PFE En
Electromécanique, Universite Mohamed Baudiaf De M’sila, Algérie, 2005.
Autre
[52] M-K. Fellah, « Asservissements Linéaires Continus », Cours De 4ème Année Ingénieur
d'Etat En Electrotechnique, Université Djillali Liabes De Sidi Bel-Abbès, Algérie, 2007.
[53] M-K. Fellah, « Représentation Et Commande Des Système Dynamiques Dans L’espace
D’état », Cours D’automatique, 1er Année Ecole Doctorale ‘’Electrotechnique Et Ces
Applications’’, Université Djillali Liabes De Sidi Bel-Abbès, Algérie, 2009.
[54] A. Meroufel, « Contrôle De La Machine Asynchrone ». Polycopie De Cours, Université
Djillali Liabes De Sidi Bel-Abbès, Algérie, 2009.
[55] H. Bounoua, « Méthodologie De La Modélisation De La Machine Asynchrone », Cours
En Electrotechnique Approfondie, 1er Année Ecole Doctorale ‘’Electrotechnique Et Ces
Applications’’, Université Djillali Liabes De Sidi Bel-Abbès, Algérie, 2009.
[56] Ph. Le Brun, « Variation De Vitesse Des Machines Asynchrones », Cours En
Electrotechnique, Lycée Louis Armand, Strasbourg, France.


















