

Analyse des modèles Réseaux de Petri Colorés par l...
29
Analyse des modèles Réseaux de Petri Colorés par Analyse des modèles Réseaux de Petri Colorés par l'accessibilité arrière l'accessibilité arrière Mohamed BOUALI Mohamed BOUALI Sous la direction de : Sous la direction de : W lt SCHÖN W lt SCHÖN Walter SCHÖN Walter SCHÖN Pavol BARGER Pavol BARGER Université de Technologie Université de Technologie de Compiègne (UTC) de Compiègne (UTC) HEUDIASYC UMR CNRS 6599 HEUDIASYC UMR CNRS 6599 Séminaire ASER : 17/11/2009 Mohamed BOUALI - [email protected]
Transcript of Analyse des modèles Réseaux de Petri Colorés par l...
Analyse des modèles Réseaux de Petri Colorés par Analyse des modèles Réseaux de Petri Colorés par l'accessibilité arrièrel'accessibilité arrière
Mohamed BOUALIMohamed BOUALI
Sous la direction de :Sous la direction de :W lt SCHÖNW lt SCHÖNWalter SCHÖNWalter SCHÖNPavol BARGERPavol BARGER
Université de Technologie Université de Technologie de Compiègne (UTC)de Compiègne (UTC)
HEUDIASYC UMR CNRS 6599HEUDIASYC UMR CNRS 6599
Séminaire ASER : 17/11/2009 Mohamed BOUALI - [email protected]

Sommaire
Introduction Introduction I i d RdPCI i d RdPCInversion de RdPCInversion de RdPCMécanismes complémentairesMécanismes complémentairesC d’é dC d’é dCas d’étudeCas d’étudeConclusion / perspectivesConclusion / perspectives
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
2
Introduction
DiagnosticDiagnosticDéfinition : identification des origines d’unDéfinition : identification des origines d’un•• Définition : identification des origines d un Définition : identification des origines d un événement d’après des observations événement d’après des observations
•• Domaine : systèmes embarquésDomaine : systèmes embarqués•• Domaine : systèmes embarquésDomaine : systèmes embarqués•• But : ‘remonter le temps’ pour analyser un fait But : ‘remonter le temps’ pour analyser un fait
passépassépassépassé
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
4

L’approche générale
Etude du système Modéliser
Analyse du
modèle
Inversiondu
modèle
Preuvesdes
résultats
ExigencesExigencesDéf illDéf ill
Modèles RdPCModèles RdPCEtudes de Performances et de Etudes de Performances et de Règles et mécanismesDéfaillancesDéfaillances •• RdP + sémantique rigoureuseRdP + sémantique rigoureuseAdapté pour systèmes embarquésAdapté pour systèmes embarquésC i d iC i d i
Qualité de ServiceQualité de Service•• Simulation de Monte CarloSimulation de Monte Carlo
Sûreté / sécuritéSûreté / sécurité
Règles et mécanismes
Comportement statique et dynamiqueComportement statique et dynamiqueSûreté / sécuritéSûreté / sécurité•• Espace d’états atteignablesEspace d’états atteignables
Explosion combinatoireExplosion combinatoirepp
Preuves formellesPreuves formelles•• Analyse directe par modèleAnalyse directe par modèle
é èé èSéminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
5
Accessibilité arrièreAccessibilité arrière
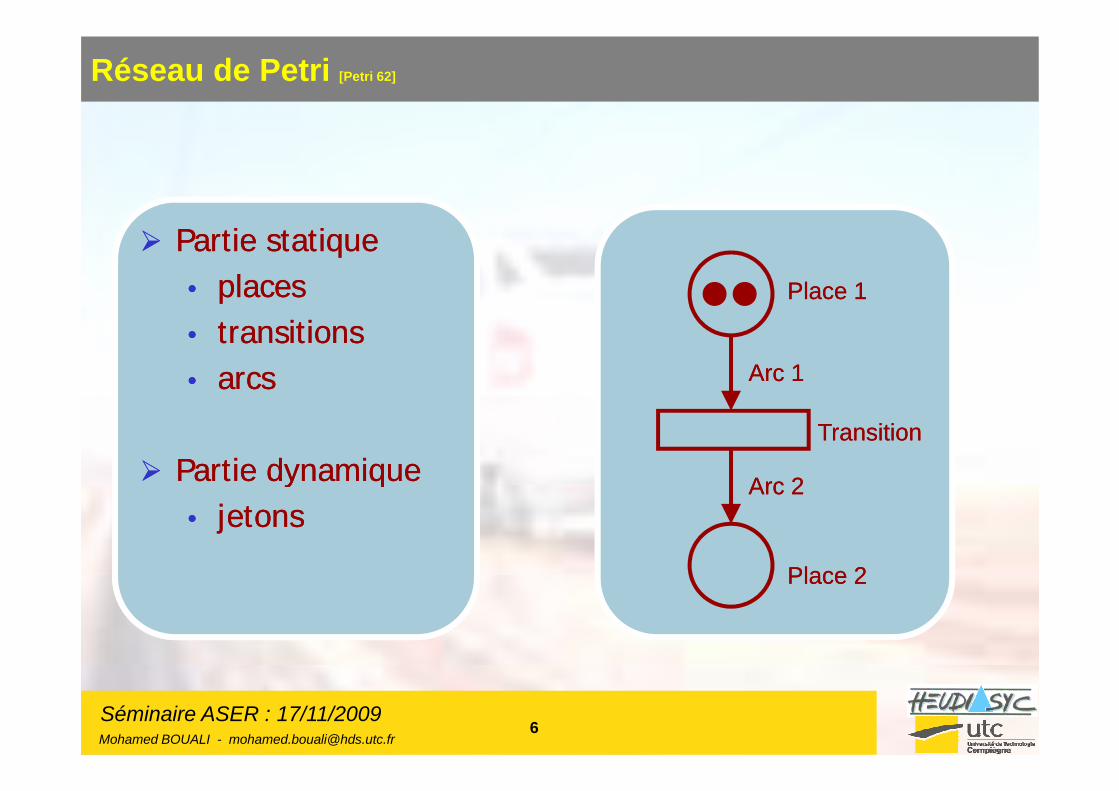
Réseau de Petri [Petri 62]
Partie statiquePartie statique•• placesplaces Place 1Place 1
•• transitionstransitions•• arcsarcs Arc 1Arc 1
Partie dynamiquePartie dynamiqueTransitionTransition
Arc 2Arc 2y qy q•• jetonsjetons
Place 2Place 2
Arc 2Arc 2
Place 2Place 2
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
6
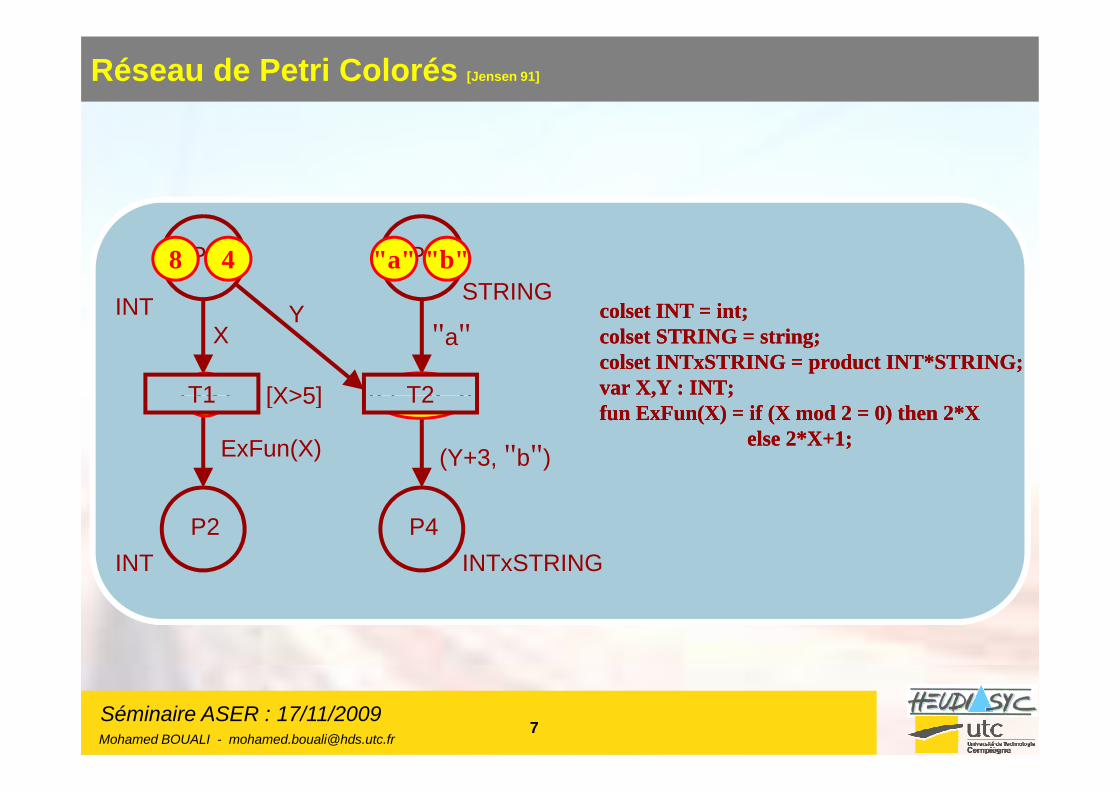
Réseau de Petri Colorés [Jensen 91]
l t INT i tl t INT i t
P1 P3
INT STRINGY
8 "b""a"4
colset INT = int;colset INT = int;colset STRING = string;colset STRING = string;colset INTxSTRING = product INT*STRING;colset INTxSTRING = product INT*STRING;var X,Y : INT;var X,Y : INT;
X
[X>5]
"a"INT Y
16 (7 "b")T1 T2 , ;, ;fun ExFun(X) = if (X mod 2 = 0) then 2*Xfun ExFun(X) = if (X mod 2 = 0) then 2*X
else 2*X+1;else 2*X+1;
[X>5]
(Y+3, "b")ExFun(X)
16 (7, b )T1 T2
P2 P4INT INTxSTRING
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
7
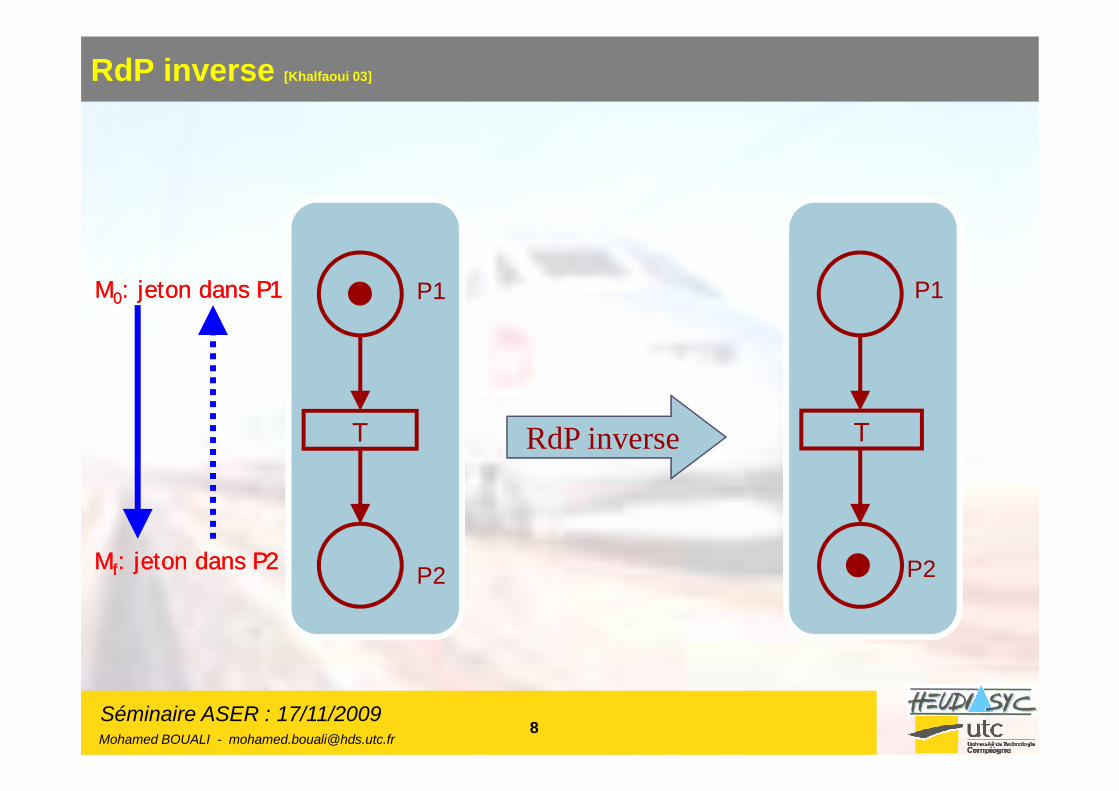
RdP inverse [Khalfaoui 03]
MM00: jeton dans P1: jeton dans P1 P1 P1
RdP inverseT T
P2MMff: jeton dans P2: jeton dans P2 P2P2 P2
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
8

Inversion des RdP ColorésInversion des RdP Colorés
Séminaire ASER : 17/11/2009 Mohamed BOUALI - [email protected]

Transformation selon structure de la transitionTransformation selon structure de la transition•• Prendre en compte Prendre en compte
Expression d’arcsExpression d’arcsddgardesgardes
•• Transformation élémentairesTransformation élémentairesTransformations triviale et basiqueTransformations triviale et basiqueTransformations triviale et basiqueTransformations triviale et basiqueTransformations paramétrées Transformations paramétrées Transformations parallèlesTransformations parallèlesTransformations de boucles/conditionnellesTransformations de boucles/conditionnelles
•• Transformations mixtes/complexesTransformations mixtes/complexesEnsemble de transformations élémentaires appliquéesEnsemble de transformations élémentaires appliquéesEnsemble de transformations élémentaires appliquées Ensemble de transformations élémentaires appliquées sur une même transitionsur une même transition
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
10

RdPC inverse
Transformation TrivialeTransformation Triviale
P1 P1" "
"a"
constantesP1 P1
"a"
"a"
a
inversion
a
"b" "a"T T
"b" "b"
"b"P2 P2"b"
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
11
RdPC inverse
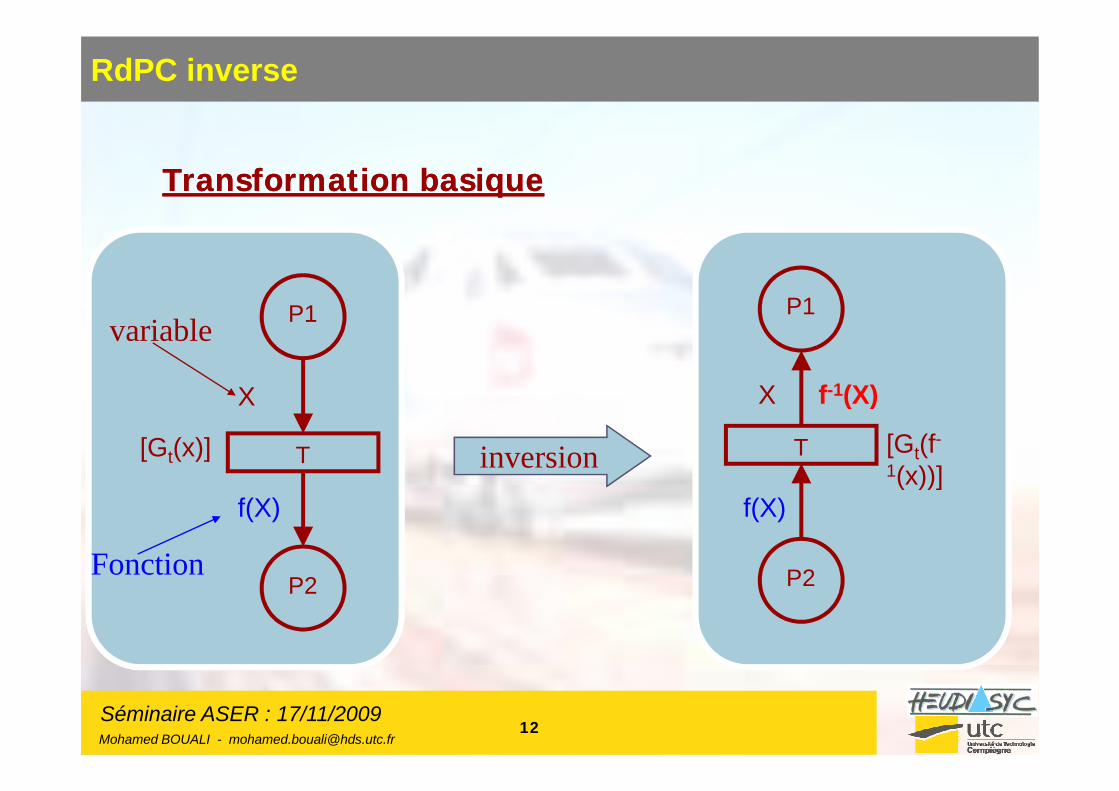
Transformation basiqueTransformation basique
P1 P1variable
X
P1 P1
X f-1(X)
inversion
X
T T
X f 1(X)
[Gt(x)] [Gt(f-1(x))]
Fonction
f(X)
P2
f(X)( ))]
P2 P2
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
12
RdPC inverse
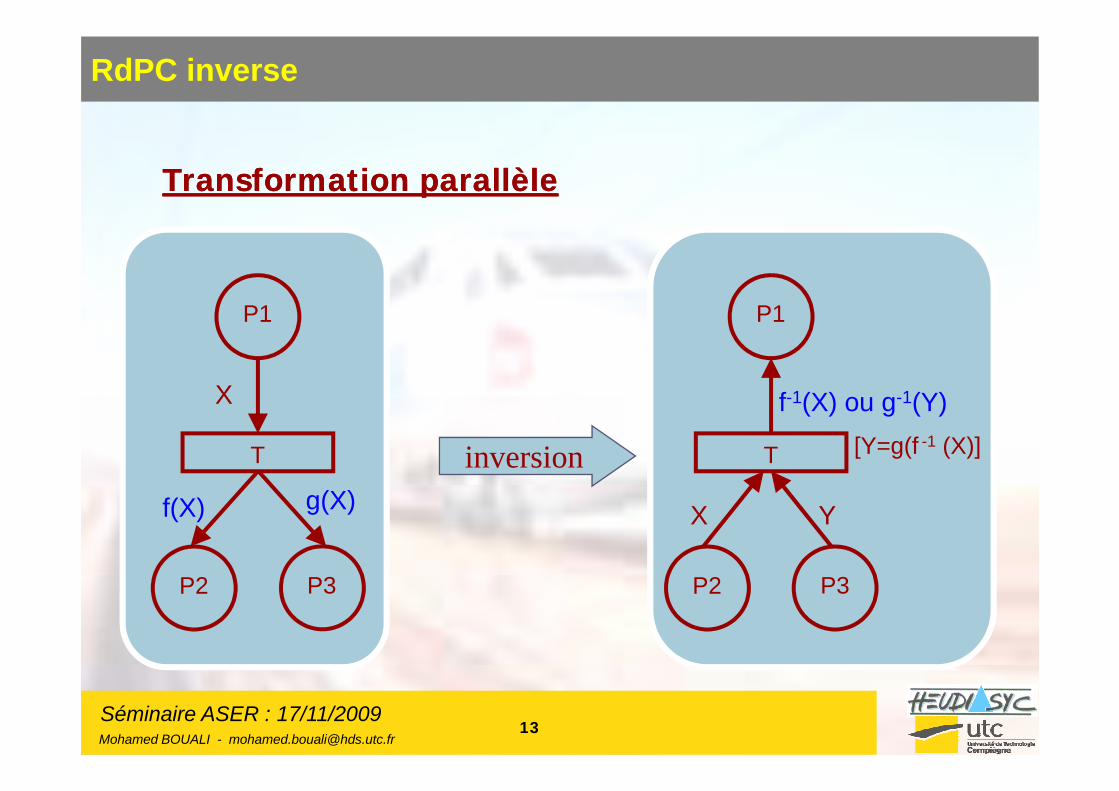
Transformation parallèleTransformation parallèle
P1 P1P1
X
P1
f 1(X) 1(Y)
inversionT
X
[Y=g(f -1 (X)]T
f-1(X) ou g-1(Y)
Yf(X) g(X) X
P2 P3 P2 P3
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
13

RdPC inverse
Transformation parallèleTransformation parallèle : : exempleexemple
P1
X
2 P1
X
3 inversion T
X-1
[Y=(X-1>5)]FT 2T
X+1 X>5 X
T
Y
[Y (X 1 5)]2
P2 P3 P2 P33 VF
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
14

RdPC inverse
Transformation paramétrée (1)Transformation paramétrée (1)
P2 P1P1 P2 P2
g -1(z x)
P1
g -1(z y)x
P1 P2
y
inversion T
gy (z,x)
T
gx-1(z,y)x
T
y
zx z y
P3
g(x,y)
P1 P3 P2 P3P3
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
15

Conclusion sur l’inversion des RdPC
In e sion d’ n g and nomb e de st t es de t ansitionsIn e sion d’ n g and nomb e de st t es de t ansitionsInversion d’un grand nombre de structures de transitionsInversion d’un grand nombre de structures de transitions•• Si les fonction sont non inversibles Si les fonction sont non inversibles procéder par procéder par
contraintescontraintesIntroduction d’indéterminisme dans l’analyseIntroduction d’indéterminisme dans l’analyseAu pire cas, cela revient à une analyse avantAu pire cas, cela revient à une analyse avant
L’inversion n’est pas suffisante pour effectuer une analyse L’inversion n’est pas suffisante pour effectuer une analyse arrièrearrière•• Besoin de mécanismes complémentairesBesoin de mécanismes complémentaires
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
16

Mécanismes complémentairesMécanismes complémentaires
Séminaire ASER : 17/11/2009 Mohamed BOUALI - [email protected]

Transition potentiellement franchissable
P1
Dans un RdPC marqué, une Dans un RdPC marqué, une transition (T) est potentiellementtransition (T) est potentiellement X-1transition (T) est potentiellement transition (T) est potentiellement franchissable si :franchissable si :•• Au moins une préAu moins une pré--condition de T condition de T
T
Y
[Y=(X-1>5)]
est marquée par un jeton est marquée par un jeton compatible avec le tir de Tcompatible avec le tir de T
•• Au moins une préAu moins une pré--condition de Tcondition de T
X Y
13Au moins une préAu moins une pré condition de T condition de T n’est marquéen’est marquée
P2 P3
13
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
18
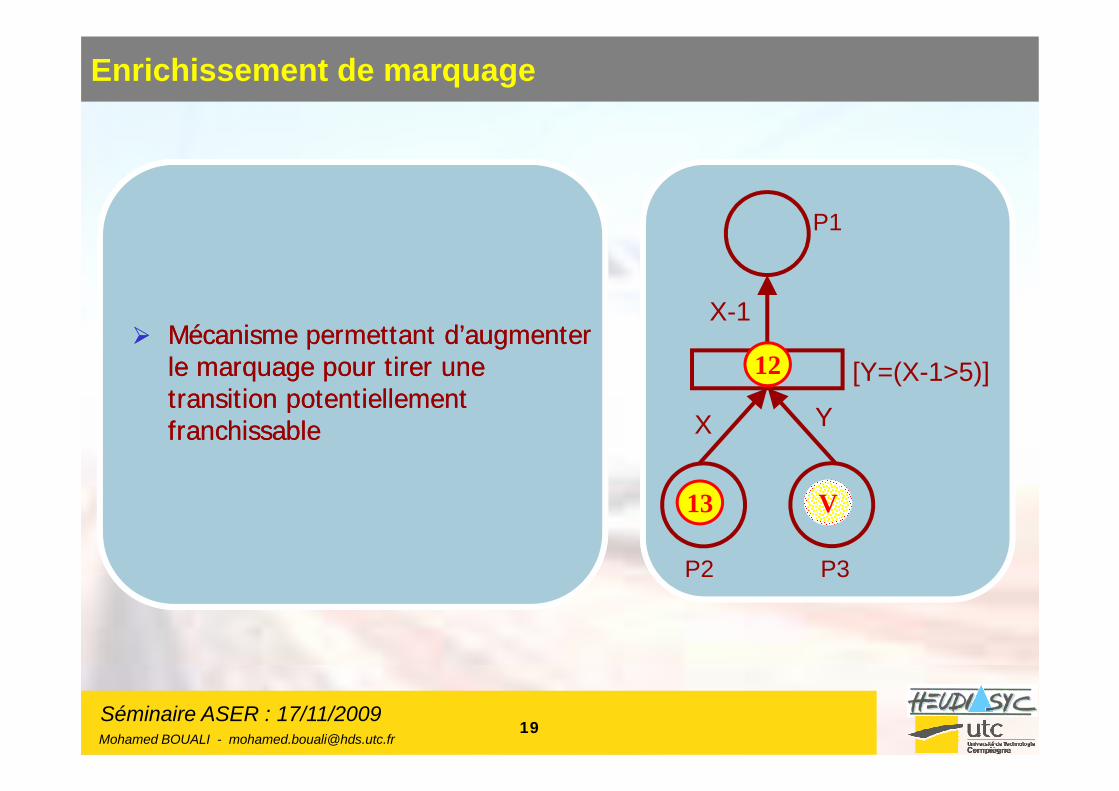
Enrichissement de marquage
P1P1
X 1Mécanisme permettant d’augmenter Mécanisme permettant d’augmenter le marquage pour tirer une le marquage pour tirer une transition potentiellementtransition potentiellement
T
X-1
[Y=(X-1>5)]12transition potentiellement transition potentiellement franchissablefranchissable X Y
P2 P3
13 V
P2 P3
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
19
Preuve de l’approche
Les algorithmes de transformations sontLes algorithmes de transformations sont--ils viables ?ils viables ?•• ButButBut But
Etude d’une seule transitionEtude d’une seule transitionVue localeVue locale
•• OutilOutil•• Outil Outil Algèbre linéaire Algèbre linéaire [Haddad 89][Haddad 89]
L’analyse par accessibilité arrière effectuée avec le RdPC inverse L’analyse par accessibilité arrière effectuée avec le RdPC inverse estest--elle correcte?elle correcte?•• But But
Etude d’un sous ensemble (tout) du RdPCEtude d’un sous ensemble (tout) du RdPCVue globaleVue globale
•• OutilOutil•• OutilOutilLogique linéaire Logique linéaire [Khalfaoui 03], [Valette 94][Khalfaoui 03], [Valette 94]
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
20
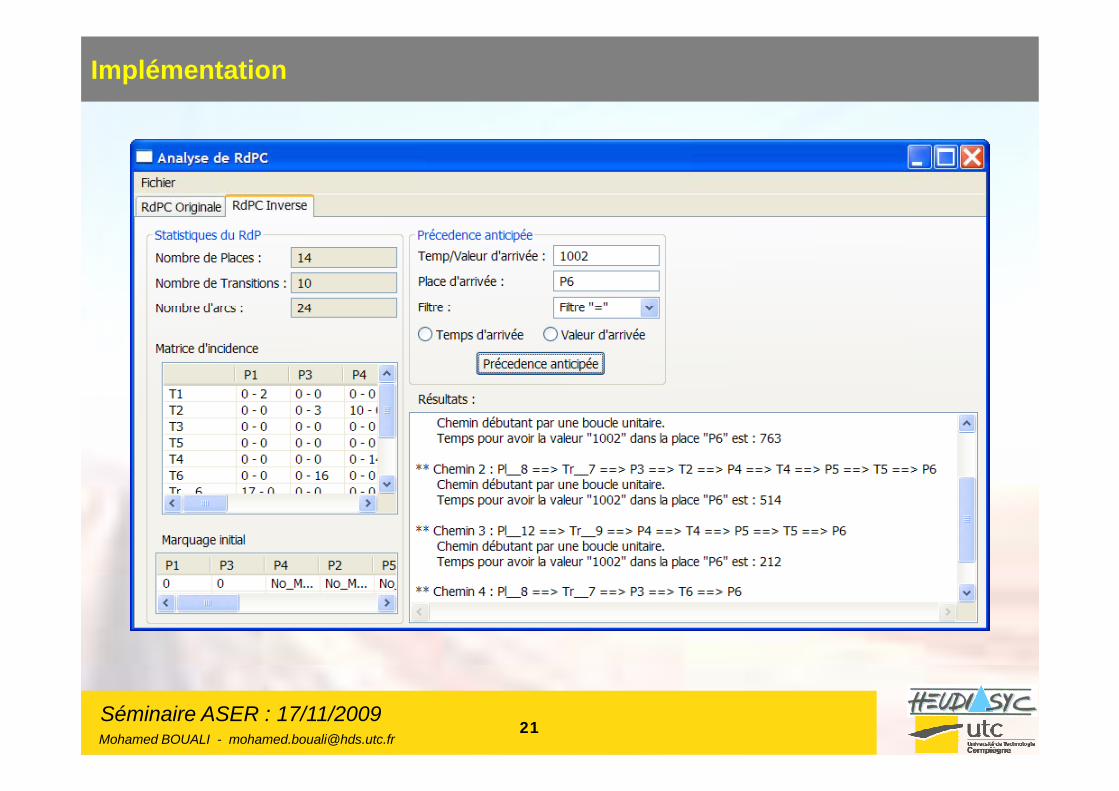
Implémentation
Fichier RdPC(.cpn)
Analyseur syntaxique / Créateur de structures de données Requêtes
Utilisateur
Moteur de calculs
Fichier_Sortie
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
21
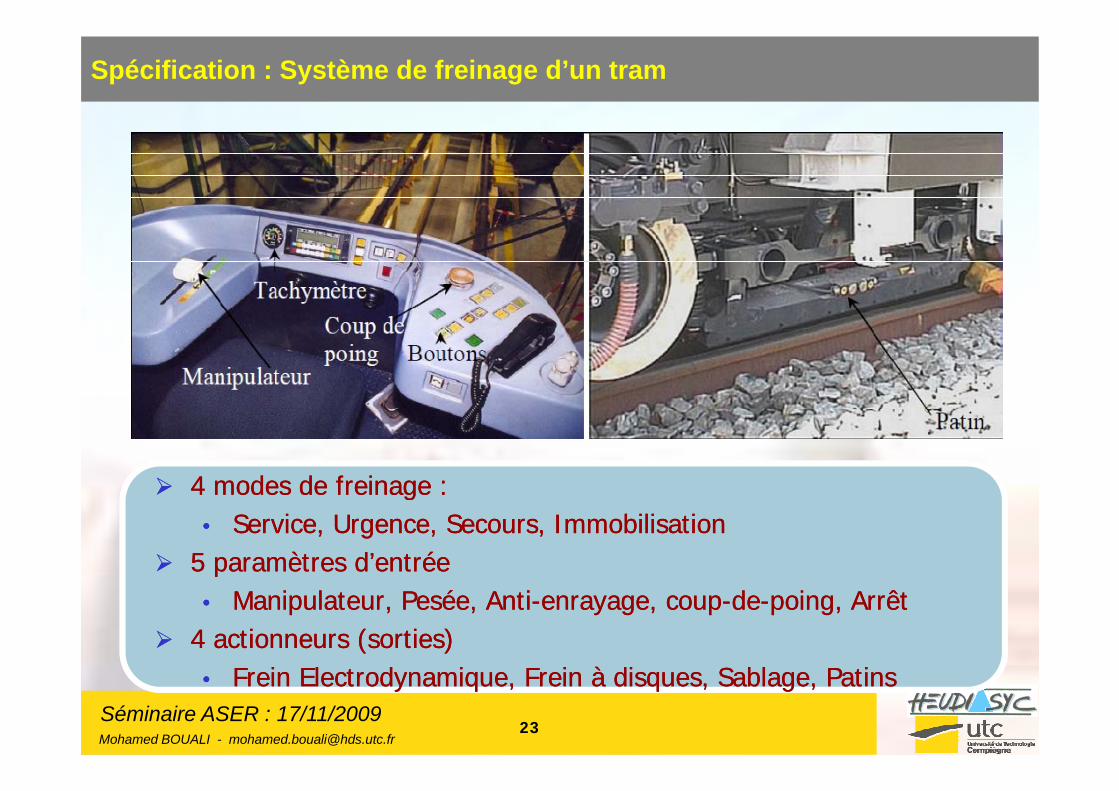
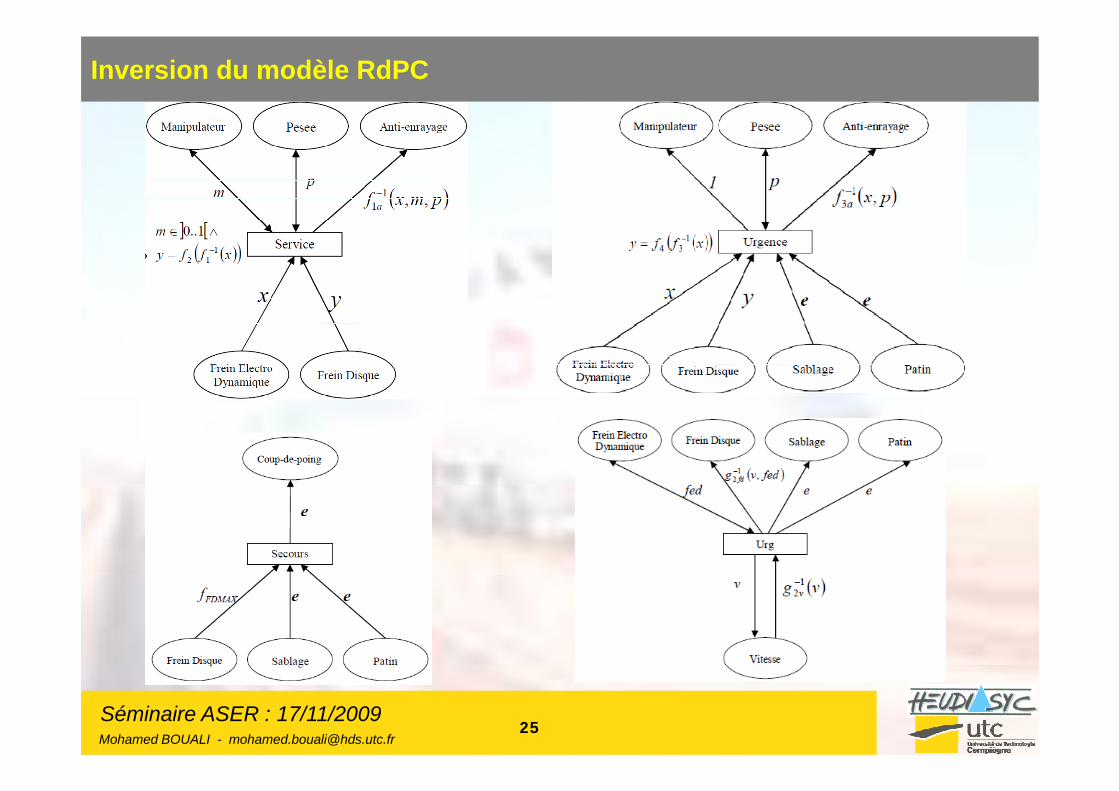
Spécification : Système de freinage d’un tram
4 modes de freinage :4 modes de freinage :4 modes de freinage : 4 modes de freinage : •• Service, Urgence, Secours, ImmobilisationService, Urgence, Secours, Immobilisation
5 paramètres d’entrée5 paramètres d’entréepp•• Manipulateur, Pesée, AntiManipulateur, Pesée, Anti--enrayage, coupenrayage, coup--dede--poing, Arrêtpoing, Arrêt
4 actionneurs (sorties)4 actionneurs (sorties)àà
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
23
•• Frein Electrodynamique, Frein à disques, Sablage, PatinsFrein Electrodynamique, Frein à disques, Sablage, Patins
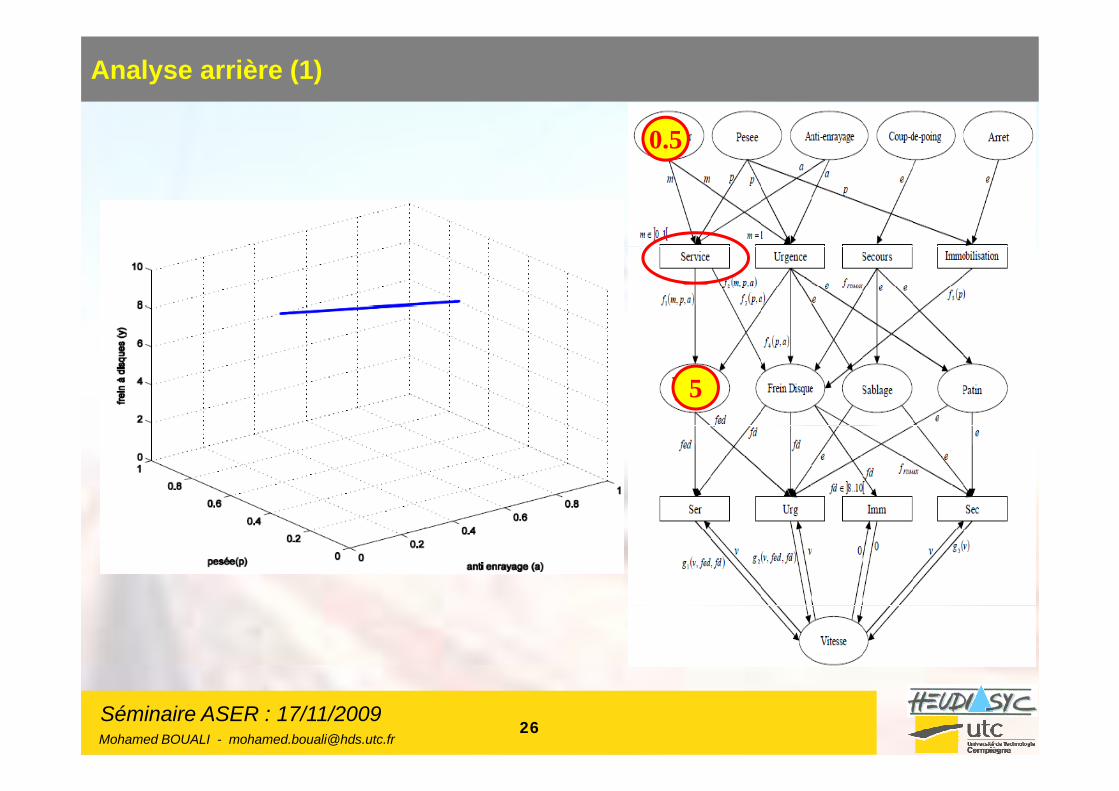
Analyse arrière (1)
0.5
Le freinage de service : Action Le freinage de service : Action Enclenchant le FED et FDEnclenchant le FED et FDEnclenchant le FED et FDEnclenchant le FED et FD•• fed = 5fed = 5
m 0 5m 0 5 5•• m = 0.5m = 0.5•• a = ?, p=?, fd=?a = ?, p=?, fd=?
5
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
26
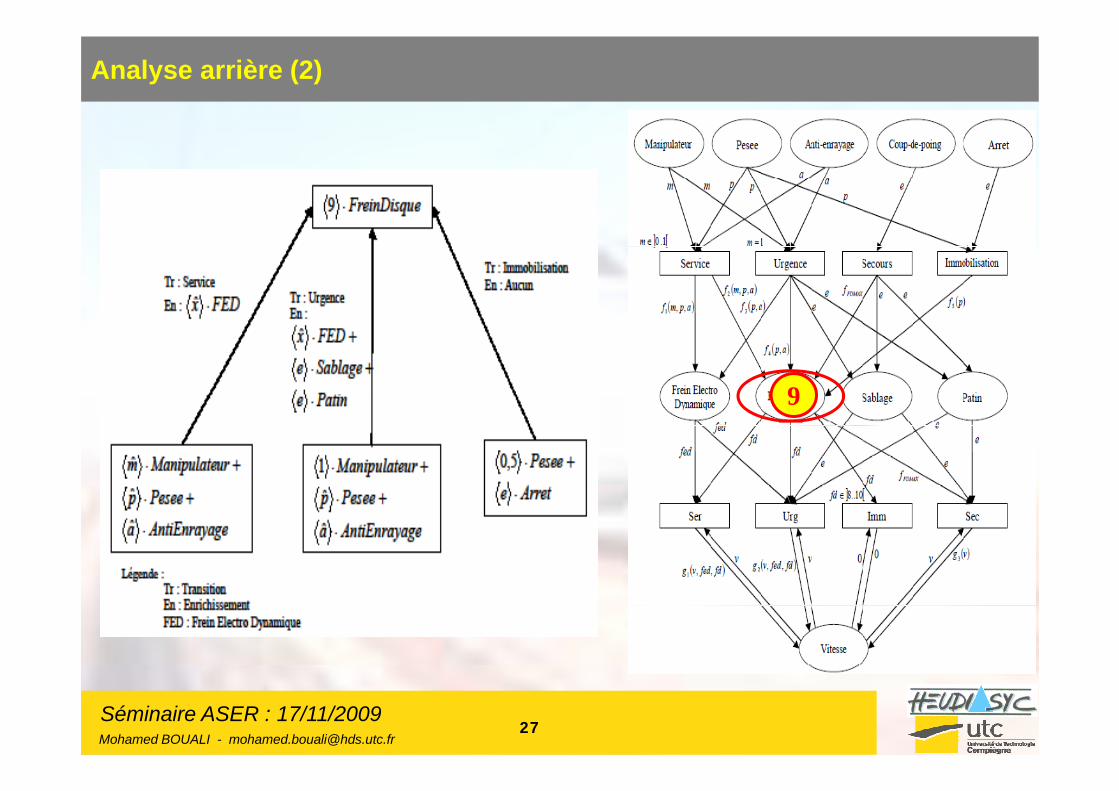
Analyse arrière (2)
Le frein à disques : Le frein à disques : •• fd = 9fd = 9 99
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
27
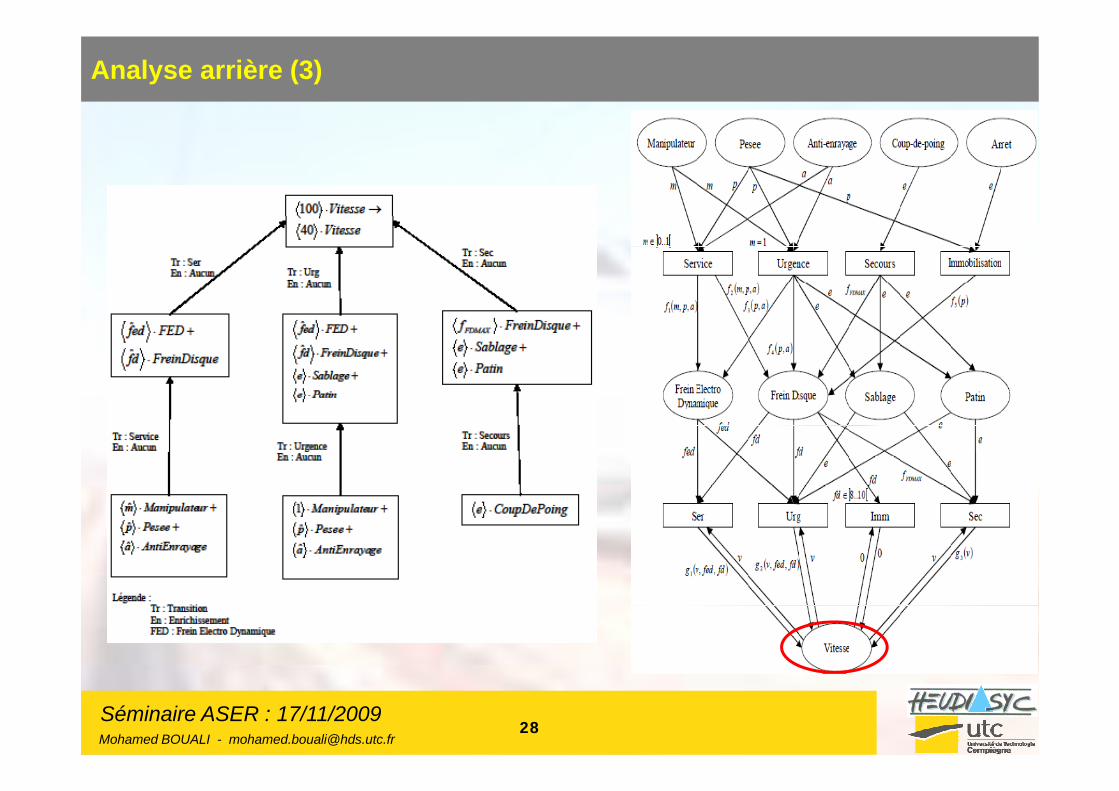
Analyse arrière (3)
Forte décélération : Forte décélération : •• 100km/h 100km/h 40km/h40km/h
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
28
Conclusion
Fait : Fait : Défi iti d è l d’i i l RdPCDéfi iti d è l d’i i l RdPC•• Définition des règles d’inversion pour les RdPCDéfinition des règles d’inversion pour les RdPC
•• Accessibilité arrière par inversionAccessibilité arrière par inversionE d hé i d l’i i d RdPC dE d hé i d l’i i d RdPC d•• Etude théorique de l’inversion des RdPC et de Etude théorique de l’inversion des RdPC et de l’accessibilité arrièrel’accessibilité arrièreApplication à n cas d’ét de ind st ielApplication à n cas d’ét de ind st iel•• Application à un cas d’étude industrielApplication à un cas d’étude industriel
A f iA f iA faireA faire•• Intégration de la programmation par contraintesIntégration de la programmation par contraintes
A t ti ti lèt d l’ hA t ti ti lèt d l’ h•• Automatisation complète de l’approcheAutomatisation complète de l’approche
Séminaire ASER : 17/11/2009Mohamed BOUALI - [email protected]
29