Actionnement des systèmes bistables : modélisation et ...cazottes/These-final.pdf · UNIVERSITÉ...
190
Transcript of Actionnement des systèmes bistables : modélisation et ...cazottes/These-final.pdf · UNIVERSITÉ...
UNIVERSITÉ PIERRE ET MARIE CURIEÉCOLE DOCTORALE 391
SMAE Sciences Mécaniques, Acoustique et Électronique
THÈSE DE DOCTORAT
Actionnement des systèmesbistables :
modélisation et études expérimentales
présentée par
Paul CAZOTTES
pour obtenir le grade de
DOCTEUR DE L'UNIVERSITÉPIERRE ET MARIE CURIE
Spécialité :Mécanique
Thèse prévue le 7 mai 2009 devant le jury composé de :
Stéphane Delbaere Schneider Electric R&D, Grenoble InvitéAmâncio Fernandes Maitre de conférence, UPMC EncadrantMoustapha Hafez Encadrant, CEA/LIST, Fontenay-aux-Roses ExaminateurPhilippe Lutz Professeur des Universités, FEMTO Besançon RapporteurJean-Jacques Marigo Professeur des Universités, UPMC ExaminateurJoël Pouget Professeur des Universités, UPMC Directeur de thèseNguyen Quoc Son Professeur des Universités, LMS Polytechnique Rapporteur
Laboratoires d'accueil :
Institut Jean le Rond d'Alembert, CNRS-UMR 7190Université Pierre et Marie Curie
Case 162, 4 Place Jussieu 75252 Paris Cedex 05
Laboratoire des Interfaces Sensorielles, CEA List18 Route du Panorama, BP6, 92265 Fontenay-aux-Roses Cedex

Apparition de la déformation mode 2 lors des tests en caméra rapide. Cette étude est basée surla coexistence de deux modes topologiques.

Table des matières
Introduction xi
1 Présentation 11.1 Classi�cation des systèmes bistables . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Les systèmes compliants . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Les systèmes monolithiques compliants . . . . . . . . . . . . . . . . . . . . 21.1.3 Déformation locale et distribuée . . . . . . . . . . . . . . . . . . . . . . . . 31.1.4 Les systèmes stables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.5 Les systèmes bistables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.6 Le système bistable historique : le double-ressort . . . . . . . . . . . . . . 6
1.2 Familles de systèmes bistables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.1 Mécanismes bistables multi-pièces . . . . . . . . . . . . . . . . . . . . . . 71.2.2 Mécanismes bistables plans basés sur le �ambement . . . . . . . . . . . . 81.2.3 Mécanismes bistables à plaque précontrainte . . . . . . . . . . . . . . . . . 81.2.4 Mécanismes bistables à plaques préformées ou anisotropes . . . . . . . . . 91.2.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Modèles des mécanismes bistables plans . . . . . . . . . . . . . . . . . . . . . . . 101.3.1 Phénomènes physiques utilisés par les mécanismes bistables . . . . . . . . 101.3.2 Le modèle deux barres - ressort . . . . . . . . . . . . . . . . . . . . . . . . 131.3.3 Les modèles pseudo-rigides évolués . . . . . . . . . . . . . . . . . . . . . . 141.3.4 Les modèles modaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.5 Approches tout-numérique . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3.6 Approches éléments �nis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.3.7 Approches expérimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.3.8 Discussion sur les modèles . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.4 Les matériaux actifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.4.1 Plusieurs matériaux, une même famille . . . . . . . . . . . . . . . . . . . . 201.4.2 Divers matériaux actifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.4.3 Densités de puissance et d'énergie volumique . . . . . . . . . . . . . . . . 291.4.4 Dimensionnement par calcul de l'énergie volumique . . . . . . . . . . . . . 301.4.5 Énergie volumique nécessaire pour le basculement . . . . . . . . . . . . . . 31
1.5 Orientation de ce travail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2 Modélisation 332.1 Flambement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.2 Résolution du système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.2.1 Choix du système, isolement . . . . . . . . . . . . . . . . . . . . . . . . . . 352.2.2 Détermination des fonctions de �ambement . . . . . . . . . . . . . . . . . 362.2.3 Écriture du travail des actionneurs . . . . . . . . . . . . . . . . . . . . . . 37

ii TABLE DES MATIÈRES
2.2.4 Détermination de la solution particulière . . . . . . . . . . . . . . . . . . . 382.2.5 Écriture de la forme de la solution complète . . . . . . . . . . . . . . . . . 402.2.6 Écriture de l'énergie du système associée à la déformée . . . . . . . . . . . 402.2.7 Détermination des solutions d'équilibre . . . . . . . . . . . . . . . . . . . . 432.2.8 Résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2.9 Lois E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2.10 Formulation en résolution 2 étapes . . . . . . . . . . . . . . . . . . . . . . 44
2.3 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.3.1 Actionnement central, basculement en mode 1 . . . . . . . . . . . . . . . . 452.3.2 Actionnement central, basculement en modes 1 et 2 combinés . . . . . . . 462.3.3 Actionnement décalé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.3.4 Actionnement central d'une barre rotulée-rotulée . . . . . . . . . . . . . . 502.3.5 Basculement de la double barre bi-encastrée en modes 1 et 3 combinés . . 51
2.4 Approche topologique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.4.1 Répartition de l'énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542.4.2 Topologie actionnement mode 1 . . . . . . . . . . . . . . . . . . . . . . . . 542.4.3 Topologie actionnement mode 2 . . . . . . . . . . . . . . . . . . . . . . . . 552.4.4 Topologie actionnement modes 1 et 2 . . . . . . . . . . . . . . . . . . . . . 562.4.5 Topologie actionnement modes supérieurs . . . . . . . . . . . . . . . . . . 582.4.6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.5 Aspects d'optimisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592.5.1 Rigidité apparente et seuil de basculement . . . . . . . . . . . . . . . . . . 592.5.2 Rapport ηP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.5.3 Pourcentage d'énergie utilisée . . . . . . . . . . . . . . . . . . . . . . . . . 622.5.4 Utilisation a priori de la topologie . . . . . . . . . . . . . . . . . . . . . . 642.5.5 Scission des entrées-sorties . . . . . . . . . . . . . . . . . . . . . . . . . . . 662.5.6 Comparaison comportement non-bistable . . . . . . . . . . . . . . . . . . 67
2.6 Modi�cation de la fonction génératrice . . . . . . . . . . . . . . . . . . . . . . . . 672.6.1 Branches fantômes du mode 3 . . . . . . . . . . . . . . . . . . . . . . . . . 682.6.2 In�uence de la solution d'équilibre . . . . . . . . . . . . . . . . . . . . . . 702.6.3 Discussion sur la méthode de résolution . . . . . . . . . . . . . . . . . . . 72
2.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3 Actionnement à base de force 753.1 Équations de l'actionnement en force . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.1.1 Familles de solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753.1.2 Génération de la solution particulière . . . . . . . . . . . . . . . . . . . . . 763.1.3 Résolution du système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.2 Analyse du comportement en force . . . . . . . . . . . . . . . . . . . . . . . . . . 793.3 Banc de test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 793.4 Chronologie de basculement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 793.5 Résultats expérimentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 813.6 Actionnement central avec défaut . . . . . . . . . . . . . . . . . . . . . . . . . . . 833.7 Hystérésis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 843.8 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 863.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87

TABLE DES MATIÈRES iii
4 Actionnement à base de moment 894.1 Modèle et paramétrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.1.1 Mécanisme étudié . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894.1.2 Mécanique du basculement . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.2 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904.2.1 Écriture des déformées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904.2.2 Écriture des énergies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914.2.3 Équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.2.4 Résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.3 Actionnement couple unique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.4 Actionnement couple double . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 954.5 Modélisation avec un moment réparti interne . . . . . . . . . . . . . . . . . . . . 97
4.5.1 Méthode de modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 974.5.2 Exemples d'actionnement en moment réparti interne . . . . . . . . . . . . 984.5.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.6 Optimisation de l'actionnement réparti . . . . . . . . . . . . . . . . . . . . . . . . 1074.6.1 Optimisation en deux branches . . . . . . . . . . . . . . . . . . . . . . . . 1074.6.2 Optimisation en trois branches . . . . . . . . . . . . . . . . . . . . . . . . 1074.6.3 Impact de la largeur des séparations . . . . . . . . . . . . . . . . . . . . . 1084.6.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.7 Conclusion sur le modèle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1134.8 Principe d'actionnement avec des MFC . . . . . . . . . . . . . . . . . . . . . . . . 1144.9 Modes de déformations et optimisation de la position . . . . . . . . . . . . . . . . 1154.10 Montage expérimental pour les MFC . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.10.1 Banc de test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164.10.2 Principe des tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1184.10.3 Chronologie de basculement . . . . . . . . . . . . . . . . . . . . . . . . . . 1194.10.4 Optimisation de la position de l'actionneur . . . . . . . . . . . . . . . . . 1194.10.5 Précompression maximale de la poutre . . . . . . . . . . . . . . . . . . . . 1214.10.6 Actionnement double-sens . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
4.11 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1234.12 Conclusion sur les tests MFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5 Étude dynamique 1275.1 Hystérésis et saut de branche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1275.2 Principe de la photoélasticité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.3 Caméra rapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.4 Bancs de test employés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.4.1 Tests sur la tranche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.4.2 Tests en photoélasticité . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.4.3 Sources de lumière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5.5 Résultats obtenus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1365.5.1 Quelques observations diverses . . . . . . . . . . . . . . . . . . . . . . . . 1365.5.2 Di�érentes échelles de temps . . . . . . . . . . . . . . . . . . . . . . . . . 1365.5.3 À vitesse faible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1375.5.4 À grande vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.5.5 À très grande vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.6 Récapitulatif et discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1465.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147

iv TABLE DES MATIÈRES
Conclusion 149
Perspectives 150
Bibliographie 151
Annexes
Annexe A Haptique et interfaces sensorielles digitales . . . . . . . . . . . . . . 1A.1 Qu'est ce que l'haptique ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1A.2 Objectifs des interfaces haptiques . . . . . . . . . . . . . . . . . . . . . . . . . . . 2A.3 Capteurs de la peau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2A.4 Intervalles de perception . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4A.5 Les interfaces sensorielles, technologie et réalisation . . . . . . . . . . . . . . . . . 4A.6 Conception objectif retenue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Annexe B Actionnement par AMF . . . . . . . . . . . . . . . . . . . . . . . . . 9B.1 Le montage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9B.2 Dimensionnement par énergie volumique . . . . . . . . . . . . . . . . . . . . . . . 11B.3 Discussion sur l'intégration d'un tel montage . . . . . . . . . . . . . . . . . . . . . 12B.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Annexe C Utilisation d'EAP pour l'actionnement de mécanismes bistables. . 15C.1 Principe d'actionnement par EAP . . . . . . . . . . . . . . . . . . . . . . . . . . . 15C.2 Montage expérimental pour les EAP . . . . . . . . . . . . . . . . . . . . . . . . . 16C.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Résumé
Abstract

Table des �gures
1.1 Ressort et arc, deux systèmes compliants . . . . . . . . . . . . . . . . . . . . . . . 21.2 Trombone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Mécanismes monolytiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.4 Mécanismes à déformation locale et distribuée . . . . . . . . . . . . . . . . . . . . 41.5 Une pince compliante stable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.6 Deux mécanismes rotatifs, l'un bistable, l'autre multiposition . . . . . . . . . . . 51.7 Courbe classique d'un mécanisme bistable . . . . . . . . . . . . . . . . . . . . . . 61.8 Le système double-barre ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.9 Stylo bic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.10 Un interrupteur micromécanique bistable . . . . . . . . . . . . . . . . . . . . . . . 81.11 Mécanismes bistables par assemblage d'une plaque monolithique . . . . . . . . . . 81.12 Pince pantalon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.13 Di�érentes con�gurations en termes de stabilité . . . . . . . . . . . . . . . . . . . 111.14 Le �ambage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.15 Caractéristique multi-branches . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.16 Coupe et sélection des branches . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.17 Mécanismes bistables PRBM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.18 Modèle pseudo-rigide pour une poutre en �exion . . . . . . . . . . . . . . . . . . 151.19 Courbe caractéristique en N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.20 Caractéristique obtenue par J. Qiu via son modèle . . . . . . . . . . . . . . . . . 161.21 Problème de non-bistabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.22 Système bistable conçu par J. Qiu, un interrupteur miniature . . . . . . . . . . . 171.23 Formes de poutre proposées et caractéristiques obtenues . . . . . . . . . . . . . . 181.24 Ressort à mémoire de forme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.25 Banc pour �l AMF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.26 E�ets piézoélectriques direct et indirect . . . . . . . . . . . . . . . . . . . . . . . 231.27 Actionneurs piézoélectriques de base . . . . . . . . . . . . . . . . . . . . . . . . . 231.28 Systèmes à actionnement piézoélectriques . . . . . . . . . . . . . . . . . . . . . . 241.29 Illustration de la souplesse des MFC . . . . . . . . . . . . . . . . . . . . . . . . . 251.30 Fabrication de la couche piézoélectrique des MFC . . . . . . . . . . . . . . . . . . 261.31 Structure des MFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.32 Principe de fonctionnement des IPMC . . . . . . . . . . . . . . . . . . . . . . . . 271.33 Pince en IPMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.34 Principe de fonctionnement des EAP . . . . . . . . . . . . . . . . . . . . . . . . . 281.35 Actionneurs direct et bender . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301.36 Banc de test � 4 kg � . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.1 Schéma du mécanisme bistable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.2 Principe du déchargement d'énergie dans les modes . . . . . . . . . . . . . . . . . 34

vi TABLE DES FIGURES
2.3 Principe de déchargement de l'énergie, système actionné . . . . . . . . . . . . . . 352.4 Paramétrage de la poutre avec un jeu de paramètres géométriques . . . . . . . . 362.5 Fonctions de �ambement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.6 Schémas d'actionnement pour un actionnement externe . . . . . . . . . . . . . . . 372.7 Courbes d'équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.8 Représentations 3D des di�érentes énergies . . . . . . . . . . . . . . . . . . . . . . 412.9 Coupes de l'énergie totale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.10 Représentation 3D de l'énergie totale, extrema . . . . . . . . . . . . . . . . . . . . 432.11 Paramétrage d'une poutre encastrée-encastrée . . . . . . . . . . . . . . . . . . . . 452.12 Schéma de basculement en mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 452.13 Courbe de basculement en mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 462.14 Courbe de force normale en mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 462.15 Déformées pour une force de 10N en basculement mode 1 . . . . . . . . . . . . . 462.16 Découpe des branches pour un actionnement central . . . . . . . . . . . . . . . . 472.17 Schéma de basculement en mode 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 472.18 Courbe f-d pour un actionnement au centre et un basculement mode 2 . . . . . . 472.19 Force normale de basculement modes 1 et 2 combinés . . . . . . . . . . . . . . . . 482.20 Con�gurations pour une force de 10N . . . . . . . . . . . . . . . . . . . . . . . . 482.21 Paramétrage d'une poutre encastrée-encastrée à actionnement décalé . . . . . . . 492.22 Principe de basculement en actionnement décalé . . . . . . . . . . . . . . . . . . 492.23 Caractéristiques f-d pour plusieurs positions d'actionnement . . . . . . . . . . . . 492.24 Paramétrage d'une poutre rotulée-rotulée . . . . . . . . . . . . . . . . . . . . . . 502.25 Principe de basculement d'une barre rotulée-rotulée . . . . . . . . . . . . . . . . . 512.26 Courbe caractéristique d'une barre bistable rotulée-rotulée . . . . . . . . . . . . . 512.27 Principe de basculement d'une double barre . . . . . . . . . . . . . . . . . . . . . 512.28 Paramétrage de la double barre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512.29 Caractéristique f-d d'une double barre . . . . . . . . . . . . . . . . . . . . . . . . 522.30 Force normale de basculement d'un mécanisme double-barre . . . . . . . . . . . . 522.31 Con�gurations de la double barre . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.32 Di�érentes con�gurations obtenues en double-barre . . . . . . . . . . . . . . . . . 522.33 Flambement dissymétrique d'un mécanisme double barre . . . . . . . . . . . . . . 532.34 Caractéristiques f-d et fn-d des double et simple barre superposées . . . . . . . . 532.35 Schéma pour un actionnement en couple central . . . . . . . . . . . . . . . . . . . 552.36 Courbe M-d mode 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.37 Courbe Fn-d mode 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.38 Schémas pour des actionnement en force et moment décalés . . . . . . . . . . . . 572.39 Courbes typiques pour un actionnement modes 1 et 2 . . . . . . . . . . . . . . . . 572.40 Courbes typiques pour un actionnement modes 1 et 2, déplacement inversé . . . . 582.41 Rigidité apparente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.42 Seuil de basculement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.43 Courbe f-d pour un actionnement central, en fonction du paramètre ηP . . . . . . 622.44 Répartition de la déformation dans les modes utiles et inutilisés . . . . . . . . . . 632.45 Fraction d'énergie transmise selon la position et l'épaisseur . . . . . . . . . . . . . 642.46 Énergies utilisée et de dimensionnement . . . . . . . . . . . . . . . . . . . . . . . 652.47 Principe et caractéristique du mécanisme bistable avec scission des E/S . . . . . . 662.48 Courbes f-d de la solution particulière et du mécanisme bistable . . . . . . . . . . 672.49 Caractéristique f-d avec deux modes topologiques . . . . . . . . . . . . . . . . . . 682.50 Caractéristique f-d avec les branches fantômes . . . . . . . . . . . . . . . . . . . . 682.51 Caractéristique fn-d avec deux modes topologiques . . . . . . . . . . . . . . . . . 69
TABLE DES FIGURES vii
2.52 Caractéristique fn-d avec les branches fantômes . . . . . . . . . . . . . . . . . . . 692.53 Caractéristiques f-d superposées deux et trois modes topologiques . . . . . . . . . 692.54 Caractéristiques fn-d superposées deux et trois modes topologiques . . . . . . . . 692.55 Caractéristique f-d avec degré de liberté sur la solution particulière . . . . . . . . 702.56 Caractéristiques f-d superposées . . . . . . . . . . . . . . . . . . . . . . . . . . . . 702.57 Courbes f-d avec et sans solution particulière, actionnement central . . . . . . . . 712.58 Courbes f-d avec et sans solution particulière, actionnement 35% . . . . . . . . . 712.59 Courbes f-d avec et sans solution particulière, actionnement 15% . . . . . . . . . 72
3.1 Mécanisme étudié pour l'actionnement en force . . . . . . . . . . . . . . . . . . . 753.2 Tracé des 8 premières fonctions de �ambement dans le cas encastré-encastré . . . 763.3 Courbes d'actionnement en force décalé . . . . . . . . . . . . . . . . . . . . . . . 803.4 Photo du banc de test en force . . . . . . . . . . . . . . . . . . . . . . . . . . . . 813.5 Chronologie d'actionnement en force décalée 35% . . . . . . . . . . . . . . . . . . 823.6 Chronologie d'actionnement en force centrale 50% . . . . . . . . . . . . . . . . . . 833.7 Actionnement en force, seconde série de mesures . . . . . . . . . . . . . . . . . . 843.8 Actionnement en force, seconde série de mesures . . . . . . . . . . . . . . . . . . 853.9 Actionnement en force à 49,5% de la longueur . . . . . . . . . . . . . . . . . . . . 853.10 Mesure de l'hystérésis de branche . . . . . . . . . . . . . . . . . . . . . . . . . . . 863.11 Coexistence de deux hystérésis, de branche et du mécanisme . . . . . . . . . . . . 87
4.1 Paramétrage du mécanisme étudié . . . . . . . . . . . . . . . . . . . . . . . . . . 904.2 Mécanique du basculement en moment . . . . . . . . . . . . . . . . . . . . . . . . 914.3 Actionnement en moment unique . . . . . . . . . . . . . . . . . . . . . . . . . . . 944.4 Elément mobile à deux couples antagonistes . . . . . . . . . . . . . . . . . . . . . 954.5 Paramétrage du montage à deux couples . . . . . . . . . . . . . . . . . . . . . . . 954.6 Di�érentes courbes E/S d'actionnements en moments antagonistes . . . . . . . . 964.7 Modèle équivalent actionnement interne réparti . . . . . . . . . . . . . . . . . . . 974.8 Montage moment réparti 0-100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 984.9 Montage moment réparti 0-50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 984.10 Montage moment réparti 0-50-100 . . . . . . . . . . . . . . . . . . . . . . . . . . . 984.11 Montage moment réparti 0-25-75-100 . . . . . . . . . . . . . . . . . . . . . . . . . 994.12 Montage moment réparti 0-20-80-100 . . . . . . . . . . . . . . . . . . . . . . . . . 994.13 Montage moment réparti 0-25-50-100 . . . . . . . . . . . . . . . . . . . . . . . . . 994.14 Actionnement en moment réparti 0-100 . . . . . . . . . . . . . . . . . . . . . . . . 1004.15 Actionnement en moment réparti 0-50 . . . . . . . . . . . . . . . . . . . . . . . . 1024.16 Actionnement en moment réparti 0-50-100 . . . . . . . . . . . . . . . . . . . . . . 1034.17 Actionnement en moment réparti 0-25-75-100 . . . . . . . . . . . . . . . . . . . . 1044.18 Actionnement en moment réparti 0-20-80-100 . . . . . . . . . . . . . . . . . . . . 1054.19 Actionnement en moment réparti 0-25-50-100 . . . . . . . . . . . . . . . . . . . . 1064.20 Montage avec deux éléments actifs, paramétrage pour l'optimisation . . . . . . . 1074.21 Montage avec trois éléments actifs, paramétrage pour l'optimisation . . . . . . . . 1084.22 Optimisation 2 branches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1094.23 Actionnement en moment réparti 0-40-100 . . . . . . . . . . . . . . . . . . . . . . 1104.24 Optimisation 3 branches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1114.25 Actionnement en moment réparti 0-20-60-100 . . . . . . . . . . . . . . . . . . . . 1124.26 Courbes avec coupures 4% . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1134.27 Mécanisme bistable actionné par MFC . . . . . . . . . . . . . . . . . . . . . . . . 1144.28 Modèle de couple équivalent théorique . . . . . . . . . . . . . . . . . . . . . . . . 1144.29 Modèle de couple équivalent réellement créé par le MFC . . . . . . . . . . . . . . 115

viii TABLE DES FIGURES
4.30 Actionnement d'une poutre bistable par MFC . . . . . . . . . . . . . . . . . . . . 1154.31 Le banc de test des MFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164.32 Le MFC vu de coté . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1174.33 Principe du banc de test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1184.34 Principe de la deuxième série de mesures . . . . . . . . . . . . . . . . . . . . . . . 1194.35 Déformation de la poutre sous tension . . . . . . . . . . . . . . . . . . . . . . . . 1204.36 Tensions de basculement pour di�érentes positions . . . . . . . . . . . . . . . . . 1214.37 Tensions de basculement en fonction de la précompression et de la position . . . . 1214.38 Tensions de basculement pour di�érentes valeurs de précompression . . . . . . . . 1224.39 Deux tests pour un actionnement double-sens . . . . . . . . . . . . . . . . . . . . 1224.40 Modèle PRBM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.1 Hystérésis idéale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285.2 Hystérésis obtenue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285.3 Hystérésis théoriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1295.4 Principe du banc de test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305.5 Utilisation des �ltres polariseurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1315.6 Exemples d'utilisation de la photoélasticité. . . . . . . . . . . . . . . . . . . . . . 1315.7 Exemple de photo obtenue. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.8 La caméra Phantom V9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.9 Banc de test photoextensométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . 1355.10 Montage photoélasticité très grande vitesse . . . . . . . . . . . . . . . . . . . . . 1375.11 Photo obtenue avec le banc de photoélasticité . . . . . . . . . . . . . . . . . . . . 1385.12 Images couleurs de photoélasticité, actionnement décalé . . . . . . . . . . . . . . 1395.13 Images couleurs de photoélasticité, actionnement central . . . . . . . . . . . . . . 1405.14 Chronographe du basculement, grande vitesse et actionnement décalé 40% . . . . 1425.15 Chronographe du basculement, grande vitesse et actionnement central 50% . . . 1435.16 Chronographe des vibrations vues par photoélasticité, actionnement décalé 40% . 1445.17 Déplacement de la ligne de contraintes, test très grande vitesse . . . . . . . . . . 145
A.1 Capteurs tactiles cutanés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3A.2 Classi�cation des capteurs tactiles cutanés . . . . . . . . . . . . . . . . . . . . . . 3A.3 Principe de module élémentaire d'une interface haptique . . . . . . . . . . . . . . 4A.4 Test avec deux pointes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5A.5 Familles de conception pour une interfaces tactile . . . . . . . . . . . . . . . . . . 5A.6 Deux exemples d'a�cheurs tactiles fonctionnels . . . . . . . . . . . . . . . . . . . 6A.7 Schéma de principe de plaque matricée d'éléments bistables . . . . . . . . . . . . 6A.8 Principe de matriçage de la de plaque . . . . . . . . . . . . . . . . . . . . . . . . 7
B.1 Actionnement par deux actionneurs AMF . . . . . . . . . . . . . . . . . . . . . . 10B.2 Éducation de l'actionneur AMF . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10B.3 Montage du banc de test AMF . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11B.4 Intégration d'éléments bistables avec actionnement AMF . . . . . . . . . . . . . . 12
C.1 Polymère électroactif avant usage . . . . . . . . . . . . . . . . . . . . . . . . . . . 16C.2 Schéma d'une poutre bistable en EAP auto-actionnée . . . . . . . . . . . . . . . . 16C.3 Schéma d'une poutre bistable en 3 portions . . . . . . . . . . . . . . . . . . . . . 16C.4 Principe du montage EAP souhaité . . . . . . . . . . . . . . . . . . . . . . . . . . 17C.5 Montage du polymère avec assemblage . . . . . . . . . . . . . . . . . . . . . . . . 17C.6 Montage envisagé pour le polymères . . . . . . . . . . . . . . . . . . . . . . . . . 17

TABLE DES FIGURES ix
C.7 Polymère électroactif avec sa coupure et coupé . . . . . . . . . . . . . . . . . . . 18
x TABLE DES FIGURES

Introduction
Ce manuscrit de thèse est consacré à l'étude de l'actionnement des structures bistables baséessur les poutres �ambées. Il s'agit de développer des modèles et des simulations pour ces systèmes.Ce travail a été mené pour répondre à un besoin, celui de la création d'interfaces haptiques, plusprécisément de surfaces sensorielles. Très rapidement, pour pouvoir transmettre une informationpar le toucher, on veut créer un système pilotable qui puisse exciter les capteurs de la peau, dudoigt.
Les capteurs humains ont une sensibilité et une résolution extraordinaire. Il coexiste di�érentstypes de capteurs de la peau, di�érents types de peau, des di�érences de performances entre lamain et les autres parties du corps, de la résolution vibratoire et statique, etc. Si on se concentresur des interfaces sensorielles statiques pour l'index, on estime le besoin à une résolution de 1mm(soit des éléments de 1mm2 pour une grille), un déplacement d'au minimum 0,2mm et une forcede quelques centièmes de mN. C'est une performance qui semble extrêmement di�cile à atteindreaujourd'hui.
Comment actionner un tel système ? Les systèmes électromagnétiques permettent di�cile-ment la réalisation de très petits actionneurs. Les actionneurs par matériaux actifs semblentplus indiqués mais consomment de l'énergie au repos, ce qui entraîne un accroissement de laconsommation électrique.
Coupler une structure bistable à un matériau actif paraît alors être une bonne solution. Onpeut alors couper l'alimentation au repos, ce qui réduit drastiquement la consommation. Onpeut pro�ter d'une force de blocage intéressante, le système reste forcément dans une des deuxcon�gurations et sera plus simple à piloter.
Mais performances statiques signi�e aussi besoin d'actionnement. Quel actionneur utiliser ?Comment le positionner ? Quelle taille doit-il avoir ? Toutes ces questions restaient sans réponsedu fait d'un manque de modèle adapté, qui permettrait de modéliser tout un panel de casd'actionnement. Ces modèles peuvent di�cilement être basés sur des méthodes classiques, àcause de l'existence de deux positions stables qui brisent tout e�ort d'utilisation de méthodenumérique à algorithme de convergence classique.
La thèse présentée dans ce document est le résultat d'un travail coopératif entre le CEA Listet la composante � solides � de l'institut Jean le Rond d'Alembert, dont le but est d'apporter desmodèles pour l'actionnement des structures bistables, et d'apporter les outils de dimensionnementqui manquaient.
Cette thèse est séparée en trois grandes parties, qui correspondent aussi aux étapes chronolo-giques de ce travail de trois ans (plus un chapitre de présentation en chapitre 1).
La première partie concerne la modélisation, sous l'angle mathématique et mécanique. Le cha-pitre 2 dévoile ainsi la méthode de résolution employée et l'analyse qui a mené à sa construction.Le chapitre 3 donne lui les résultats de l'étude de l'actionnement en force, avec des validationsexpérimentales. Puis le chapitre 4 détaille le cas de l'actionnement en moment.
La seconde partie est une étude expérimentale dynamique, présentée en chapitre 5. Celle-ci

xii Introduction
nous a permis de répondre à diverses questions que nous nous posions concernant la dynamiquedu basculement, qui ne peut être étudiée par notre modèle quasi-statique.
En�n, une dernière partie concerne l'évaluation de di�érents matériaux actifs pour l'action-nement de systèmes bistables, les composites à macro-�bres (en seconde partie du chapitre 4), lesalliages à mémoire de forme (en annexe B) et un début d'étude pour des polymères électro-actifs(en annexe C).
Chapitre 1
Présentation
Ce chapitre décrit les mécanismes bistables. Que sont-ils ? A quelle catégorie de mécanismesappartiennent-ils ? Les di�érentes familles de bistables sont présentées, ainsi que les matériauxactifs.
1.1 Classi�cation des systèmes bistables
1.1.1 Les systèmes compliants
Il n'existe pas de système parfaitement rigide. L'hypothèse des corps et des systèmes rigidesque l'on utilise couramment re�ète que les déformations de pièces rigides sont tellement faiblesqu'on va pouvoir négliger les déformations.
Pourtant, il y a de plus en plus de systèmes déformables. Pour certains systèmes, on va utiliserune déformation de la structure pour permettre à un système d'encaisser un e�ort exceptionnel,qui n'est pas destiné à se reproduire lors de la durée de vie d'une pièce. On utilise aussi unedéformation non-réversible, dite plastique, par exemple pour encaisser des e�orts avec destruc-tion, comme c'est maintenant la règle pour les crash-tests des voitures. Ces systèmes, complexesà concevoir, ont vu le jour récemment grâce aux évolutions de la technique.
En dehors de ces cas où la déformation revêt un caractère exceptionnel, il existe des casoù la déformation fait partie du fonctionnement normal d'une pièce, et ne l'endommage pas.On nomme ces mécanismes les mécanismes compliants, qui sont dé�nis comme des systèmesmécaniques qui utilisent leur déformation élastique comme une fonction.
Le terme compliant est un anglicisme, de l'anglais compliant mechanism. On pourrait utiliserle terme de mécanisme �exible, mais celui-ci s'applique aussi à des systèmes qui se déformentpour supporter une contrainte et non par fonction. Il faut bien souligner que plus qu'une simpledéformation la compliance est une fonction du mécanisme.
L'exemple le plus commun est aussi l'un des plus anciens. Le ressort se déforme pour accu-muler de l'énergie. Il la restituera ensuite lorsqu'on libère la contrainte, même si on l'utilise aussitrès souvent pour apporter en permanence une force de rappel. Un autre exemple, l'arc, est luiutilisé exclusivement pour restituer de l'énergie, qu'il restitue sous forme d'énergie cinétique à la�èche après la tension de la corde.
Un troisième exemple plus complexe est le trombone. Ce mécanisme en apparence très simpleest souvent utilisé comme exemple d'un mécanisme optimal. Il va combiner une déformationplastique initiale pour s'adapter à l'épaisseur du tas de feuille à serrer, puis une déformationélastique, un déformation compliante, qui lui permet de maintenir une pression en permanencesur les feuilles. Ce type de mécanisme est considéré impossible à remplacer par un mécanismeplus classique, en termes d'e�cacité, de simplicité, de coût, de robustesse, de poids . . . On notera

2 Présentation
W d
(a) système ressort (b) un arc
Fig. 1.1 � Ressort et arc. Ces deux systèmes sont très anciens, pourtant ce sont bien des systèmescompliants, un terme inventé bien après eux.
Fig. 1.2 � Un trombone. En l'apparence très simple, ce mécanisme recèle plusieurs facettes, avectant une capacité de déformation plastique que de compliance.
que le trombone n'est en fait pas un véritable mécanisme compliant puisqu'il utilise la plasticité.Les déformations de ces mécanismes peuvent être obtenues par tous types de contraintes
extérieures, forces, moments. . . Leur point commun reste le coté fonctionnel de la déformation.Parce que chaque mécanisme est optimisé pour sa seule fonction, ce sont souvent des mécanismesoptimaux. Ils sont ainsi très complexes à remplacer par des solutions équivalentes.
1.1.2 Les systèmes monolithiques compliants
Les systèmes monolithiques sont des mécanismes formés d'une seule pièce. Les systèmesmonolytiques compliants, une sous-catégorie des mécanismes compliants, sont des mécanismesdéformables d'une seule pièce. Le ressort précité en est un exemple.
On utilise de tels mécanismes en recherche pour des micromécanismes, lorsqu'il est di�cile decréer des liaisons entre des pièces rigides, car ils permettent la réalisation de fonctions complètessans assemblage. Ainsi, les liaisons sont créées à même la pièce par découpe, comme par exemplepour la table de translation montrée en Fig. 1.3(a) [5].
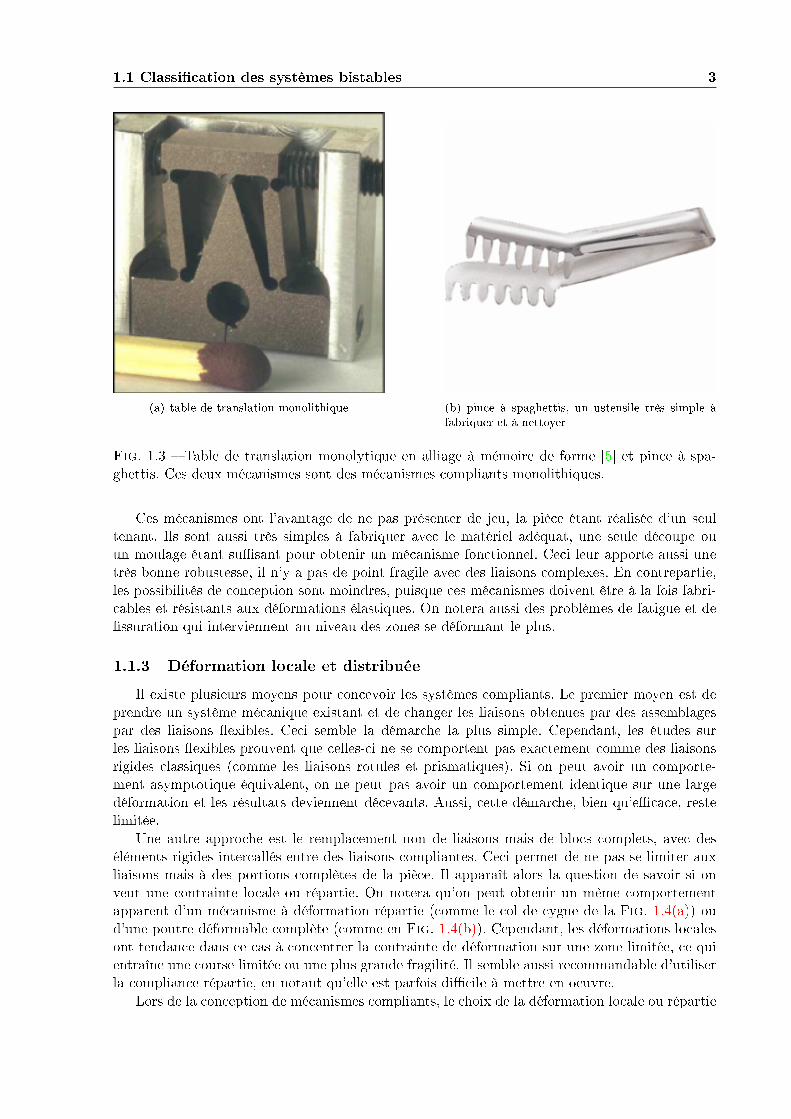
On les utilise aussi dans la vie de tous les jours, comme pour les pinces à spaghettis (enFig. 1.3(b)). Ils béné�cient d'un excellent rapport fonctionnalité-coût, mais aussi d'une extrêmepropreté, puisqu'il n'y a pas de liaisons qui viendrait s'encrasser ou qui empêcherait un nettoyagecomplet. Ce dernier point est très important en cuisine certes, mais surtout pour des applicationsmédicales, où l'on peut créer des outils simples et qui supportent un passage à l'autoclave. Unautre usage récent a été les montures de lunettes, qui évitent ainsi les rotules des branches,di�ciles à nettoyer sans outillage adéquat.
1.1 Classi�cation des systèmes bistables 3
(a) table de translation monolithique (b) pince à spaghettis, un ustensile très simple àfabriquer et à nettoyer
Fig. 1.3 � Table de translation monolytique en alliage à mémoire de forme [5] et pince à spa-ghettis. Ces deux mécanismes sont des mécanismes compliants monolithiques.
Ces mécanismes ont l'avantage de ne pas présenter de jeu, la pièce étant réalisée d'un seultenant. Ils sont aussi très simples à fabriquer avec le matériel adéquat, une seule découpe ouun moulage étant su�sant pour obtenir un mécanisme fonctionnel. Ceci leur apporte aussi unetrès bonne robustesse, il n'y a pas de point fragile avec des liaisons complexes. En contrepartie,les possibilités de conception sont moindres, puisque ces mécanismes doivent être à la fois fabri-cables et résistants aux déformations élastiques. On notera aussi des problèmes de fatigue et de�ssuration qui interviennent au niveau des zones se déformant le plus.
1.1.3 Déformation locale et distribuée
Il existe plusieurs moyens pour concevoir les systèmes compliants. Le premier moyen est deprendre un système mécanique existant et de changer les liaisons obtenues par des assemblagespar des liaisons �exibles. Ceci semble la démarche la plus simple. Cependant, les études surles liaisons �exibles prouvent que celles-ci ne se comportent pas exactement comme des liaisonsrigides classiques (comme les liaisons rotules et prismatiques). Si on peut avoir un comporte-ment asymptotique équivalent, on ne peut pas avoir un comportement identique sur une largedéformation et les résultats deviennent décevants. Aussi, cette démarche, bien qu'e�cace, restelimitée.
Une autre approche est le remplacement non de liaisons mais de blocs complets, avec deséléments rigides intercallés entre des liaisons compliantes. Ceci permet de ne pas se limiter auxliaisons mais à des portions complètes de la pièce. Il apparaît alors la question de savoir si onveut une contrainte locale ou répartie. On notera qu'on peut obtenir un même comportementapparent d'un mécanisme à déformation répartie (comme le col de cygne de la Fig. 1.4(a)) oud'une poutre déformable complète (comme en Fig. 1.4(b)). Cependant, les déformations localesont tendance dans ce cas à concentrer la contrainte de déformation sur une zone limitée, ce quientraîne une course limitée ou une plus grande fragilité. Il semble aussi recommandable d'utiliserla compliance répartie, en notant qu'elle est parfois di�cile à mettre en oeuvre.
Lors de la conception de mécanismes compliants, le choix de la déformation locale ou répartie

4 Présentation
(a) mécanisme à déformation locale libre (b) mécanisme à déformation distribuée libre
F
(c) mécanisme à compliance locale en charge
F
(d) mécanisme à déformation distribuée en charge
Fig. 1.4 � Mécanismes à déformation locale et distribuée, libre et en charge. On peut obtenirdes performances géométriques et des forces équivalentes, mais au prix d'un accroissement descontraintes subies par le matériau.
est un des paramètres à prendre en compte. D'autres paramètres interviennent (possibilité desimuler l'élément pour un algorithme génétique par exemple, fabrication, accessibilité. . .). Ici,c'est globalement les contraintes spéci�ques de l'objet qui guident le concepteur, dont le savoir-faire est le premier guide. Les mécanismes compliants sont si spéci�ques à leurs besoins qu'il nepeut être établi de règle stricte de conception.
1.1.4 Les systèmes stables
La stabilité est la faculté à rester dans une con�guration donnée. Un mécanisme sera ditstable s'il existe une con�guration dans laquelle hors contrainte il est capable de rester sansmouvement et vers laquelle le mécanisme aura tendance à se rendre lorsqu'il n'est pas dans cettecon�guration. Lorsqu'on relâche sa contrainte externe, le mécanisme doit alors converger vers saposition dite stable.
Pour l'exemple du ressort, la position stable serait la position libre, et lorsque le mécanismen'est pas dans cette position, une force de rappel se crée qui a tendance à ramener le ressortvers cette position. Lorsqu'on relâche la force, le ressort va osciller autour de sa position stablejusqu'à ce qu'il puisse revenir dans celle-ci. On notera qu'il faut que l'oscillation autour de laposition stable se réduise peu à peu, c'est le rôle de l'amortissement, qui permet de dissiper unsurplus d'énergie.
La majorité des mécanismes passifs compliants sont stables. En e�et, on ne peut pas avoirde mécanismes instables pour des questions d'énergie, seuls restent des mécanismes multistablesou des mécanismes avec des positions d'équilibre neutre, notamment les mécanismes avec frot-tement. Cependant, parce que les matériaux sont majoritairement soumis à des lois élastiques,les mécanismes compliants, construits avec ces mêmes matériaux, seront élastiques et donc ma-joritairement stables.
Au bout d'un cycle de contrainte, ces mécanismes vont revenir à leur position d'équilibre.C'est ce cycle qui leur permet d'assurer des fonctions, comme serrage-desserrage, ou un dépla-cement latéral gauche-droite alternatif par exemple. On en montre un exemple en Fig. 1.5, avecune pince robotique compliante monotithique [7]. Ils ont le défaut d'une course qui reste limitée,puisqu'ils doivent revenir à leur position de stabilité, au contraire d'un moteur électromagnétique

1.1 Classi�cation des systèmes bistables 5
Fig. 1.5 � Une pince compliante stable, optimisée par algorithme génétique [7]. Elle revient à saposition stable lorsque non-contrainte.
par exemple. De plus, comme l'énergie est peu dissipée (le frottement n'est souvent pas majeurdans le fonctionnement), ils doivent restituer leur énergie sur un cycle de fonctionnement. Aussides phénomènes de vibration peuvent apparaître, et toute la chaîne d'actionnement doit êtrecapable d'encaisser la restitution d'énergie.
1.1.5 Les systèmes bistables
Les systèmes bistables sont des systèmes ayant deux et seulement deux positions stables. Cesdeux positions vont pouvoir être utilisées comme une fonction de sélection mécanique binaire,par exemple pour des interrupteurs (allumé-éteint), des systèmes de serrage (serré-libre), desvannes optiques, hydrauliques, pneumatiques. . .
Un mécanisme ayant des positions intermédiaires stables neutres ne sera pas bistable. Parexemple, le mécanisme de la Fig. 1.6(a) sera un mécanisme bistable. Au contraire, le mécanismede la Fig. 1.6(b) sera lui un mécanisme multiposition, puisque entre les deux domaines stablesdes deux positions préférentielles existe un ensemble de positions stables neutres. Le mécanismepeut en e�et rester au repos entre les deux positions préférentielles sans force de rappel.
lame flexible bistable
(a) système rotatif bistable (b) système rotatif bi-position
Fig. 1.6 � Deux mécanismes rotatifs, l'un bistable, l'autre multiposition.
Du fait des propriétés bien dé�nies des bistables énoncées ci-dessus, ces mécanismes ont unecourbe caractéristique reconnaissable. Dans le cas de déformation statique continue, on obtientune courbe comme celle de la Fig. 1.7, donnée dans le cas d'un modèle pseudo-rigide triangle-ressort, force-déplacement et énergie-déplacement. On se référera aux courbes topologie mode 1et 2 données ultérieurement pour les courbes de déformations statiques discontinues.
On voit apparaître deux positions stables et une position d'équilibre instable. Autour de

6 Présentation
chacune des positions stables existe un domaine stable, où une force de rappel fait revenir lesystème dans sa position stable. Au delà (soit au delà de la position instable ici), on basculedans l'autre position stable. Un système bistable est bien un système qui comprend deux etuniquement deux zones stables. Le passage de l'une à l'autre se fait par un processus de sélection,le basculement, qui sélectionne l'autre domaine stable.
Fig. 1.7 � Courbe classique d'un mécanisme bistable, obtenue par un modèle triangle-ressort,on remarque les forces de rappel autour des positions stables
1.1.6 Le système bistable historique : le double-ressort
Le système bistable de référence, où plutôt le plus pédagogique est un système à deux barres,chaque barre étant équipée de ressort, comme représenté en Fig. 1.8.
Par compression, les ressorts permettent au mécanisme de passer d'une position à l'autre (cf.Fig. 1.8). On peut ensuite régler la rigidité en modi�ant la raideur des ressorts et la course enchoisissant les longueurs à vide des ressorts.

1.2 Familles de systèmes bistables 7
F
Fig. 1.8 � Le système double-barre ressort, la référence des mécanismes bistables.
Ces modèles très simples permettent par analogie d'étudier certains cas de poutre �ambée.Ils donnent systématiquement des courbes qui ressemblent à des sinus, simples à étudier (pas dediscontinuité) et surtout qui se rapprochent dans certains cas des courbes réelles. Aussi ils sontconsidérés comme de bons choix pour la représentation des systèmes bistables.
S'ils donnent des résultats souvent bons, ces modèles se révèlent souvent trop simples pourmodéliser �nement tous types de structures bistables. Heureusement, deux branches de modèlesont permis de repartir de ce point mort, d'une part, les modèles pseudo-rigides évolués (le modèleprécédent faisant également partie des modèles pseudo-rigides), qui ont mis en avant des com-binaisons bien plus complexes d'assemblages pseudo-rigides, d'autre part les modèles modauxinitiés par M. Vangbo.
1.2 Familles de systèmes bistables
Plusieurs catégories de mécanismes bistables coexistent. Quatre grandes familles sont citéesci-après.
1.2.1 Mécanismes bistables multi-pièces
La photo précédente est publiée sous la licence GNU Free Documentation license, version 1.2 or any later version de la Free Software
Foundation.Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation license, Version 1.2or any later version published by the Free Software Foundation ; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts.
A copy of the license is included in the section entitled "GNU Free Documentation license".
Fig. 1.9 � Stylo bic, un mécanisme bistable par assemblage permet la rétraction de la mine.
Une première méthode consiste à utiliser un assemblage d'éléments tel qu'il existe deuxdomaines stables (chaque domaine étant en général obtenu par l'usage d'un ressort), séparéspar un saut de con�guration. Un exemple type est le stylo à mine rétractable, comme celuide la Fig. 1.9. Le saut de con�guration est ici obtenu par le déplacement d'une petite piècelatérale. Dans d'autres cas, on utilise une pièce rotative. Un ressort apporte la stabilité des deuxcon�gurations stables.

8 Présentation
1.2.2 Mécanismes bistables plans basés sur le �ambement
Fig. 1.10 � Un interrupteur micromécanique bistable [9].
Une seconde catégorie regroupe des mécanismes plans. La bistabilité provient dans ce cas du�ambement d'une poutre ou d'un phénomène similaire. Limités à deux dimensions, ces méca-nismes sont réalisables par des techniques de découpe sans aucun assemblage �nal, comme utiliséen micromécanique. De ce fait, on retrouve de nombreux mécanismes bistables MEMS (micro-electro-mechanical systems, les micromécanismes électro-mécaniques intégrants mécaniques, élec-tronique, actionneurs et capteurs) fabriqués dans du silicium, tel celui de la Fig. 1.10 [9].
1.2.3 Mécanismes bistables à plaque précontrainte
(a) barrettes � clic-clac � à cheveux
Lame bistable« clic-clac »
(b) partie de disjoncteur Schneider
Fig. 1.11 � Mécanismes bistables par assemblage d'une plaque monolithique, une barrette àcheveux en (a) et un disjoncteur Schneider en (b). La partie bistable est tout au centre de laphoto. Tous deux partagent le même principe physique.

1.2 Familles de systèmes bistables 9
Une autre catégorie utilise un mécanisme plaque avec une précontrainte. Cette catégoriecouvre des mécanismes extrêmement courants, on y retrouve la barrette à cheveux (cf. un exempleen Fig. 1.11(a)) ou des disjoncteurs électriques (cf. Fig. 1.11(b)). On quali�e d'ailleurs cettebarrette de barrette � clic-clac �, ce qui illustre bien l'existence de ces deux positions stables(asymétriques) séparées par un basculement. On notera que pour ces deux mécanismes, l'action-nement ne pose pas de soucis, la pince à cheveux étant actionnée manuellement, le disjoncteurétant actionné en déclenchement par un bilame thermique, puis réenclenché manuellement dansson sens dur (c'est un mécanisme bistable asymétrique).
1.2.4 Mécanismes bistables à plaques préformées ou anisotropes
Fig. 1.12 � Deux pinces à pantalon, l'une ouverte (à gauche) et l'autre fermée (à droite). C'estun mécanisme bistable plaque qui utilise l'anisotropie.
Une dernière catégorie utilise des plaques anisotropes, ou des plaques préformées [20], quipermettent de s'a�ranchir de la précontrainte des mécanismes précédents. On peut alors créerdes systèmes 3D plaques bistables. L'exemple le plus connu est certainement la pince à pantalon(cf. Fig. 1.12). Ce type de structure peut s'utiliser pour modi�er des structures [18] [37]. Onprojette aussi de les utiliser pour des structures enroulables et dépliables [21], allant des ailesd'avions légers à des écrans d'ordinateurs portables [39].
1.2.5 Discussion
Nous avons besoin pour ce travail de mécanismes très simples. En e�et, nous souhaitonsmodéliser des mécanismes qui pourront être fabriqués en parallèle et en réseau. Dans cetteoptique, les mécanismes qui semblent les plus adaptés sont des mécanismes plans, qui permettentde créer des systèmes bistables en utilisant uniquement deux dimensions.
Par ailleurs, on constatera qu'on s'est attaché à donner des exemples de la vie courante,excepté pour les mécanismes plans, très orientés recherche. Les mécanismes bistables, parcequ'ils sont des mécanismes optimaux en terme de fonctionnalité quand on a uniquement besoinde deux positions stables, sont très répandus dans des objets courants.
Nous nous sommes ici exclusivement intéressé à une structure unitaire, le mécanisme bistableest isolé dans une structure fasse-t-il partie d'un réseau. Chaque système en e�et est indépen-dant de son voisin dans une interface haptique, et on souhaite pouvoir actionner chacun dessystèmes indépendamment. Des structures où les mécanismes bistables ne sont pas indépendantsexistent, notamment des robots série binaires [27]. Une variante sont les robots ou les modulesdigitaux, constitués de mécanismes bistables en série dont le débattement de chaque étage est lamoitié ou le double du précédent, qui sont utilisés comme convertisseurs mécaniques numériques-analogiques [57] [51] [33] [14].

10 Présentation
1.3 Modèles des mécanismes bistables plans
Dans cette section, on présente di�érents phénomènes physiques nécessaires pour étudier lesmécanismes bistables plans, puis les familles de modèles dédiés aux mécanismes bistables plans.
1.3.1 Phénomènes physiques utilisés par les mécanismes bistables
La stabilité
Un premier phénomène est la stabilité. Suivent plusieurs dé�nitions pour l'équilibre, dont faitpartie la stabilité et les comportements directement associés.
Une structure est dite bistable si elle comporte deux con�gurations d'équilibre stables. Autourde ces deux con�gurations, on trouve deux domaines stables. Entre ces deux domaines, on agénéralement un domaine instable ou une position d'équilibre instable.
Une position est dite en équilibre si au repos, c'est-à-dire en l'absence de contrainte extérieure,le système conserve sa con�guration au cours du temps. Ceci correspond aussi à un extremumlocal d'énergie (dans le cas d'un système conservatif) du mécanisme selon chaque variable.
Une position d'équilibre stable est une position d'équilibre telle que toute sollicitation suf-�samment faible laisse le système dans son domaine stable, le système revenant ensuite aprèsrelachement de la contrainte vers sa position stable. Ceci correspond à un minimum d'énergieselon toutes les variables.
Un domaine stable entoure et contient une position stable. Il est l'ensemble des con�gurationsobtenues par une sollicitation extérieure (considérée comme su�samment faible) à partir de laposition stable tel que lors de l'annulation de cette contrainte, le système revient à partir d'uncertain temps à sa position d'équilibre.
Un domaine instable est un domaine ou il n'existe pas de position d'équilibre. La variationd'énergie est strictement monotone sur au moins une variable, monotone sur les autres.
Une position d'équilibre instable est une position d'équilibre telle que toute sollicitationextérieure amènera le système dans un domaine instable. Ceci correspond à un maximum locald'énergie de la structure selon toutes les variables.
Une position d'équilibre neutre (on parle aussi de position indi�érente ou de stabilité indé�nie)est une position d'équilibre telle que toute sollicitation amène le système dans un autre domainestable. Ceci correspond à une annulation de toutes les dérivées de l'énergie selon toutes lesvariables.
Une position indé�nie est une position d'équilibre telle qu'il existe simultanément une sollici-tation su�samment faible telle que le système reste dans un domaine stable et une sollicitationsu�samment faible telle que le domaine passe dans un autre domaine (stable ou instable). Uneposition indé�nie est donc stable selon certaines variables, métastable ou indé�nie selon d'autres.En terme d'énergie, on a un minimum selon certaines variables, annulation de la dérivée ou maxi-mum selon d'autres.
On peut utiliser l'analogie classique avec une bille sur un plan pour visualiser les phénomènesd'équilibre. La Fig. 1.13 illustre les di�érents types de positions énoncées précédemment. Parexemple, une vallée donnera une position stable, puisque la bille va revenir au fond de la vallée,au contraire un col sera en équilibre instable puisque la bille aura tendance à s'éloigner du coldès qu'on lui applique un déplacement ou une force. Le cas de la bistabilité est représenté enFig. 1.13(f). Pour ce schéma, on a représenté une bistabilité non-symétrique, ainsi les vallées nesont pas à la même altitude.

1.3 Modèles des mécanismes bistables plans 11
(a) position d'équilibrestable
(b) position d'équilibre instable (c) position d'équilibre neutre
(d) position d'équilibreindé�nie (col en 3D)
(e) position instable (f) système bistable
Fig. 1.13 � Di�érentes con�gurations en termes de stabilité, utilisant l'analogie avec une billesur un plan.
Le �ambement, le phénomène à la base de la bistabilité
Le �ambage ou �ambement est un phénomène à la base des mécanismes bistables que l'onétudie ici. Soumis à une sollicitation mécanique, un mécanisme �ambe s'il se déforme dansune direction orthogonale à la direction de sollicitation.C'est un comportement singulier de lastructure [47]. On le représente en Fig. 1.14 dans le cas d'une poutre.
FF
(a) non �ambé
F
(b) �ambé
Fig. 1.14 � Principe du �ambage. Dans le cas non �ambé en (a), le pilier reste droit. Dansle cas �ambé en (b), le pilier se courbe perpendiculairement à la direction de la contrainte decompression, entraînant la ruine de la structure .
C'est un phénomène qui est connu avant tout pour des accidents, notamment en génie civil(e�ondrement de structures) et dans le domaine du ferroviaire (cf. par exemple [16]).
Ce phénomène apparaît lorsqu'il est plus facile (moins énergétique) pour le système de sedéformer latéralement sous la contrainte plutôt que de se comprimer. De ce fait, il limite lescontraintes admissibles par une poutre droite puisqu'à un certain point le comportement n'est
12 Présentation
plus de la compression mais du �ambage, instable, qui conduit à la ruine de la structure. Il estcependant utilisé dans un cas particulier ici.
Normalement, le �ambement est un phénomène destructeur, la structure perdant sa forme etsa capacité de résistance à la charge (une fois �ambée la structure va s'e�ondrer, puisqu'elle nepeut pas supporter de contrainte supplémentaire et devient instable). Dans le cas des structuresbistables, on �xe les bords, ce qui fait que le système �ambe mais ne devient pas instable (lesvariables entrée-sortie choisies sont di�érentes). Aussi, l'utilisation du terme de �ambement peutêtre trompeur. Il s'agit ici d'un phénomène stable de déformation orthogonale à la compression,qui nous permet d'obtenir deux formes bombées.
Le fait de pouvoir choisir indi�éremment deux orientations de �ambement est à la base de labistabilité.
Sélection et découpe de branches
La sélection de branche est une méthode associée à l'existence de plusieurs con�gurationspossibles pour un même système mécanique soumis aux mêmes contraintes. Par suite de la conti-nuité des déformations, les déformations possibles d'un mécanisme sont regroupées en di�érentsensembles, les branches de déformations, ou lieux de déformation si on utilise une terminolo-gie mathématique. Lorsque plusieurs déformations sont possibles pour une même contrainte, onobtient plusieurs branches de déformations possibles, et on coupe et sélectionne les branchesutiles.
Déplacement
Force
(1)
(1b)
(2)
(1a)
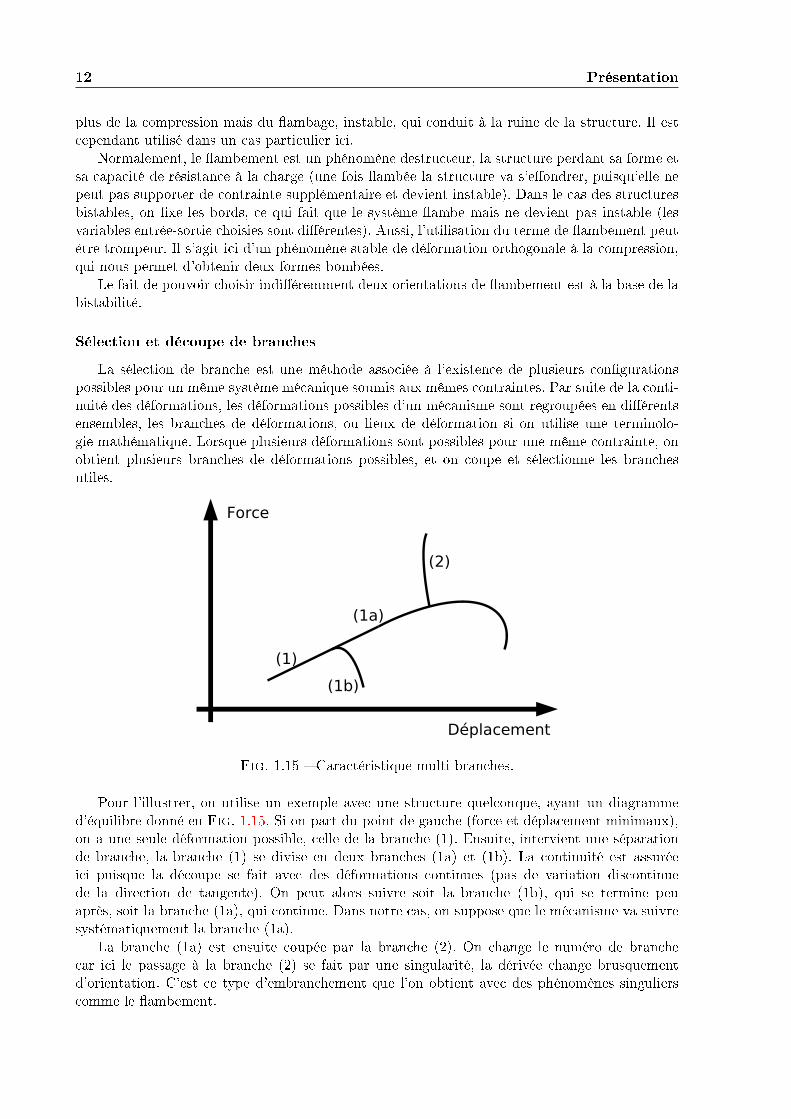
Fig. 1.15 � Caractéristique multi-branches.
Pour l'illustrer, on utilise un exemple avec une structure quelconque, ayant un diagrammed'équilibre donné en Fig. 1.15. Si on part du point de gauche (force et déplacement minimaux),on a une seule déformation possible, celle de la branche (1). Ensuite, intervient une séparationde branche, la branche (1) se divise en deux branches (1a) et (1b). La continuité est assuréeici puisque la découpe se fait avec des déformations continues (pas de variation discontinuede la direction de tangente). On peut alors suivre soit la branche (1b), qui se termine peuaprès, soit la branche (1a), qui continue. Dans notre cas, on suppose que le mécanisme va suivresystématiquement la branche (1a).
La branche (1a) est ensuite coupée par la branche (2). On change le numéro de branchecar ici le passage à la branche (2) se fait par une singularité, la dérivée change brusquementd'orientation. C'est ce type d'embranchement que l'on obtient avec des phénomènes singulierscomme le �ambement.
1.3 Modèles des mécanismes bistables plans 13
Déplacement
Force
(1)
(1b)
(2)
(1a)
(a) coupe
Déplacement
Force
(1)
(2)
(1a)
(b) sélection
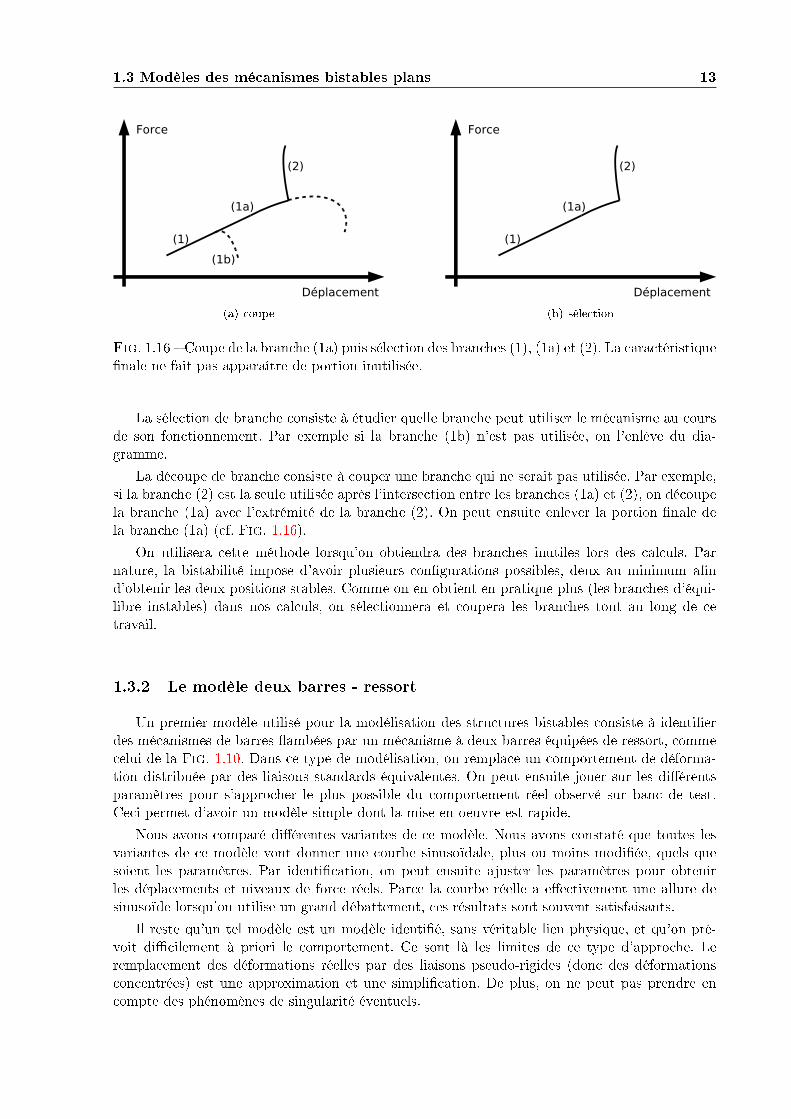
Fig. 1.16 � Coupe de la branche (1a) puis sélection des branches (1), (1a) et (2). La caractéristique�nale ne fait pas apparaître de portion inutilisée.
La sélection de branche consiste à étudier quelle branche peut utiliser le mécanisme au coursde son fonctionnement. Par exemple si la branche (1b) n'est pas utilisée, on l'enlève du dia-gramme.
La découpe de branche consiste à couper une branche qui ne serait pas utilisée. Par exemple,si la branche (2) est la seule utilisée après l'intersection entre les branches (1a) et (2), on découpela branche (1a) avec l'extrémité de la branche (2). On peut ensuite enlever la portion �nale dela branche (1a) (cf. Fig. 1.16).
On utilisera cette méthode lorsqu'on obtiendra des branches inutiles lors des calculs. Parnature, la bistabilité impose d'avoir plusieurs con�gurations possibles, deux au minimum a�nd'obtenir les deux positions stables. Comme on en obtient en pratique plus (les branches d'équi-libre instables) dans nos calculs, on sélectionnera et coupera les branches tout au long de cetravail.
1.3.2 Le modèle deux barres - ressort
Un premier modèle utilisé pour la modélisation des structures bistables consiste à identi�erdes mécanismes de barres �ambées par un mécanisme à deux barres équipées de ressort, commecelui de la Fig. 1.10. Dans ce type de modélisation, on remplace un comportement de déforma-tion distribuée par des liaisons standards équivalentes. On peut ensuite jouer sur les di�érentsparamètres pour s'approcher le plus possible du comportement réel observé sur banc de test.Ceci permet d'avoir un modèle simple dont la mise en oeuvre est rapide.
Nous avons comparé di�érentes variantes de ce modèle. Nous avons constaté que toutes lesvariantes de ce modèle vont donner une courbe sinusoïdale, plus ou moins modi�ée, quels quesoient les paramètres. Par identi�cation, on peut ensuite ajuster les paramètres pour obtenirles déplacements et niveaux de force réels. Parce la courbe réelle a e�ectivement une allure desinusoïde lorsqu'on utilise un grand débattement, ces résultats sont souvent satisfaisants.
Il reste qu'un tel modèle est un modèle identi�é, sans véritable lien physique, et qu'on pré-voit di�cilement à priori le comportement. Ce sont là les limites de ce type d'approche. Leremplacement des déformations réelles par des liaisons pseudo-rigides (donc des déformationsconcentrées) est une approximation et une simpli�cation. De plus, on ne peut pas prendre encompte des phénomènes de singularité éventuels.
14 Présentation
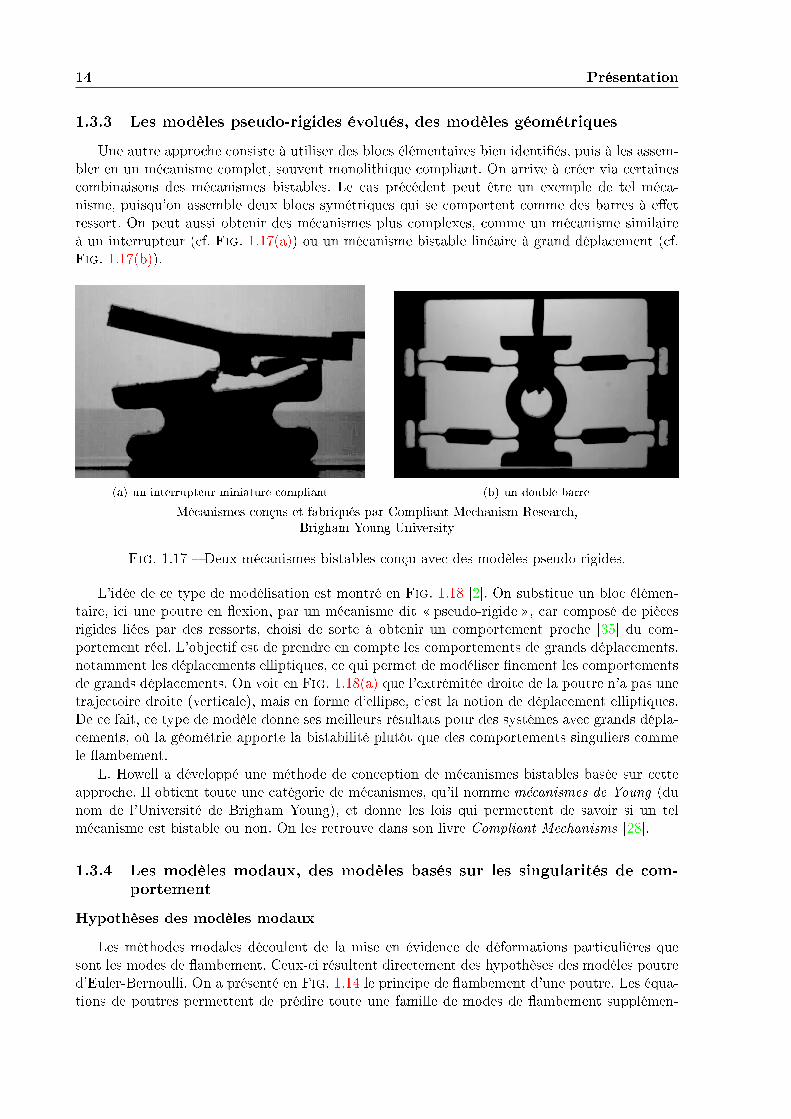
1.3.3 Les modèles pseudo-rigides évolués, des modèles géométriques
Une autre approche consiste à utiliser des blocs élémentaires bien identi�és, puis à les assem-bler en un mécanisme complet, souvent monolithique compliant. On arrive à créer via certainescombinaisons des mécanismes bistables. Le cas précédent peut être un exemple de tel méca-nisme, puisqu'on assemble deux blocs symétriques qui se comportent comme des barres à e�etressort. On peut aussi obtenir des mécanismes plus complexes, comme un mécanisme similaireà un interrupteur (cf. Fig. 1.17(a)) ou un mécanisme bistable linéaire à grand déplacement (cf.Fig. 1.17(b)).
(a) un interrupteur miniature compliant (b) un double barre
Mécanismes conçus et fabriqués par Compliant Mechanism Research,Brigham Young University
Fig. 1.17 � Deux mécanismes bistables conçu avec des modèles pseudo-rigides.
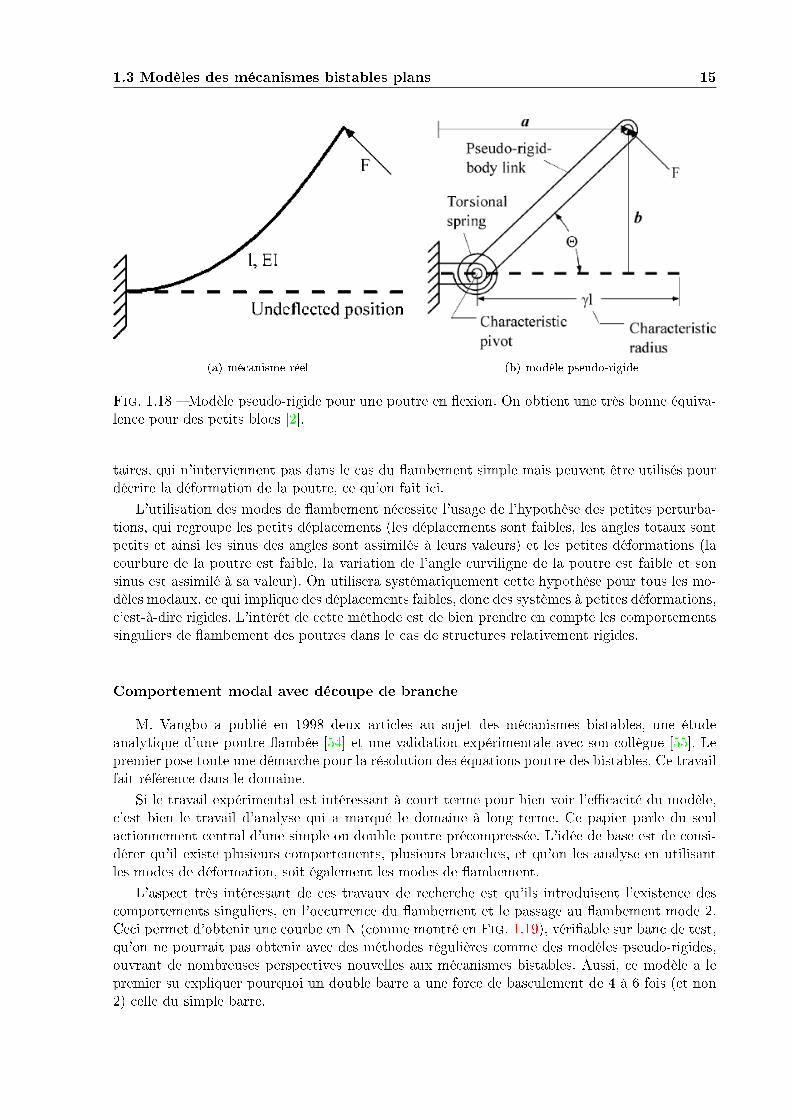
L'idée de ce type de modélisation est montré en Fig. 1.18 [2]. On substitue un bloc élémen-taire, ici une poutre en �exion, par un mécanisme dit � pseudo-rigide �, car composé de piècesrigides liées par des ressorts, choisi de sorte à obtenir un comportement proche [35] du com-portement réel. L'objectif est de prendre en compte les comportements de grands déplacements,notamment les déplacements elliptiques, ce qui permet de modéliser �nement les comportementsde grands déplacements. On voit en Fig. 1.18(a) que l'extrémitée droite de la poutre n'a pas unetrajectoire droite (verticale), mais en forme d'ellipse, c'est la notion de déplacement elliptiques.De ce fait, ce type de modèle donne ses meilleurs résultats pour des systèmes avec grands dépla-cements, où la géométrie apporte la bistabilité plutôt que des comportements singuliers commele �ambement.
L. Howell a développé une méthode de conception de mécanismes bistables basée sur cetteapproche. Il obtient toute une catégorie de mécanismes, qu'il nomme mécanismes de Young (dunom de l'Université de Brigham Young), et donne les lois qui permettent de savoir si un telmécanisme est bistable ou non. On les retrouve dans son livre Compliant Mechanisms [28].
1.3.4 Les modèles modaux, des modèles basés sur les singularités de com-portement
Hypothèses des modèles modaux
Les méthodes modales découlent de la mise en évidence de déformations particulières quesont les modes de �ambement. Ceux-ci résultent directement des hypothèses des modèles poutred'Euler-Bernoulli. On a présenté en Fig. 1.14 le principe de �ambement d'une poutre. Les équa-tions de poutres permettent de prédire toute une famille de modes de �ambement supplémen-
1.3 Modèles des mécanismes bistables plans 15
(a) mécanisme réel (b) modèle pseudo-rigide
Fig. 1.18 � Modèle pseudo-rigide pour une poutre en �exion. On obtient une très bonne équiva-lence pour des petits blocs [2].
taires, qui n'interviennent pas dans le cas du �ambement simple mais peuvent être utilisés pourdécrire la déformation de la poutre, ce qu'on fait ici.
L'utilisation des modes de �ambement nécessite l'usage de l'hypothèse des petites perturba-tions, qui regroupe les petits déplacements (les déplacements sont faibles, les angles totaux sontpetits et ainsi les sinus des angles sont assimilés à leurs valeurs) et les petites déformations (lacourbure de la poutre est faible, la variation de l'angle curviligne de la poutre est faible et sonsinus est assimilé à sa valeur). On utilisera systématiquement cette hypothèse pour tous les mo-dèles modaux, ce qui implique des déplacements faibles, donc des systèmes à petites déformations,c'est-à-dire rigides. L'intérêt de cette méthode est de bien prendre en compte les comportementssinguliers de �ambement des poutres dans le cas de structures relativement rigides.
Comportement modal avec découpe de branche
M. Vangbo a publié en 1998 deux articles au sujet des mécanismes bistables, une étudeanalytique d'une poutre �ambée [54] et une validation expérimentale avec son collègue [55]. Lepremier pose toute une démarche pour la résolution des équations poutre des bistables. Ce travailfait référence dans le domaine.
Si le travail expérimental est intéressant à court terme pour bien voir l'e�cacité du modèle,c'est bien le travail d'analyse qui a marqué le domaine à long terme. Ce papier parle du seulactionnement central d'une simple ou double poutre précompressée. L'idée de base est de consi-dérer qu'il existe plusieurs comportements, plusieurs branches, et qu'on les analyse en utilisantles modes de déformation, soit également les modes de �ambement.
L'aspect très intéressant de ces travaux de recherche est qu'ils introduisent l'existence descomportements singuliers, en l'occurrence du �ambement et le passage au �ambement mode 2.Ceci permet d'obtenir une courbe en N (comme montré en Fig. 1.19), véri�able sur banc de test,qu'on ne pourrait pas obtenir avec des méthodes régulières comme des modèles pseudo-rigides,ouvrant de nombreuses perspectives nouvelles aux mécanismes bistables. Aussi, ce modèle a lepremier su expliquer pourquoi un double barre a une force de basculement de 4 à 6 fois (et non2) celle du simple barre.

16 Présentation
Fig. 1.19 � Courbe caractéristique en N, le résultat présenté par M. Vangbo en 1998 [54]. Ilutilise une courbe déplacement-force plutôt qu'une courbe force-déplacement.
Mécanismes pré�ambés
Des travaux de recherche dans la lignée des précédents ont été menés par J. Qiu et al [42] [41].Des bistables monolithiques, sans précompression, sont modélisés. En e�et, créer une précom-pression du mécanisme est di�cile, même si on peut utiliser certaines propriétés intéressantesliées au processus de fabrication [19].
actionneur thermique 1
actionneur thermique 2 poutreexterne
poutreinterne
poutreexterne
poutre interne
contact contact
poutre dans sa forme naturelle
poutre bras-de-levier
poutre complètement déformée
en grisé, les accroches
lien de double-barre
Fig. 1.20 � Caractéristique obtenue par le modèle de J. Qiu [41].
J. Qiu propose une résolution di�érente de celle de Vangbo. Tout est adimensionné. De plus,le calcul est complètement analytique. C'est un calcul long, bien construit, notamment au niveaude la résolution, qui reste basé sur le schéma et les équations de départ présentées par M. Vangbo,

1.3 Modèles des mécanismes bistables plans 17
avec la découpe de branche �nale. Il obtient la caractéristique de la Fig. 1.20, qui montre une trèsbonne adéquation avec l'étude éléments-�nis, et une asymétrie liée à l'asymétrie de fabrication dumécanisme. La principale di�érence se situe au niveau de l'équation de �exion, qui incorpore unedéformation initiale, celle qui est obtenue lors de la microfabrication. On peut alors dimensionnerdes mécanismes directement découpés dans un bloc de matière. Ceci rend ce modèle très utilepour la modélisation de microsystèmes et en a fait un travail de référence.
Force
basculement
(a) double barre
Force
retour
(b) simple barre
Fig. 1.21 � Problème de non-bistabilité, une des motivations initiale de ce modèle.
Ce travail spéci�e des règles qui indiquent si le mécanisme obtenu sera bistable, une descontraintes clef de la conception. En e�et, en fonction des dimensions, un mécanisme de barredécoupée �ambée peut être bistable ou monostable. De plus, pour une même dimension, unmécanisme double barre sera bistable quand son équivalent monobarre sera monostable, commemontré en Fig. 1.21 [41].
Le système bistable étudié dans ces travaux est un interrupteur bistable miniature, montréen Fig. 1.22. Le résultat a été un mécanisme fonctionnel, mais qui consommait un peu tropd'énergie au basculement.
actionneur thermique 1
actionneur thermique 2 poutreexterne
poutreinterne
poutreexterne
poutre interne
contact contact
poutre dans sa forme naturelle
poutre bras-de-levier
poutre complètement déformée
en grisé, les accroches
lien de double-barre
Fig. 1.22 � Système bistable conçu par J. Qiu, un interrupteur miniature [42].
Amélioration de la forme
Un autre résultat très intéressant est celui présenté par M. Brenner, en 2003 dans [8]. Ils'agit d'un travail réalisé en parallèle du travail précédent, et on retrouve les mêmes personnes

18 Présentation
en coauteurs. Le but est de changer la forme de la poutre, initialement de section constante, parune section variable qui permettrait de rendre plus symétrique le fonctionnement d'une poutrebistable découpée directement dans un matériau (monolithique).
(a) formes (dilatées) de poutre employées (b) courbes caractéristiques résultantes
Fig. 1.23 � Formes de poutre proposées et caractéristiques obtenues.
Il est proposé dans cette publication un calcul essentiellement numérique, qui aboutit à desformes telles que données en Fig. 1.23(a), fortement dilatées dans la direction de l'épaisseur. Onobtient alors les courbes caractéristiques associées données en Fig. 1.23(b), qui sont beaucoupplus symétriques que celle obtenues par des mécanismes à poutres droites, ce qui est l'objectifde l'optimisation.
L'article montre aussi une courbe force-normale - déplacement, la première publiée explicite-ment en journal.
Le calcul utilise lui aussi les fonctions modales comme équations de départ, la résolution estnumérique et donne des résultats similaires aux résultats précédents. Les méthodes de résolution,bien que di�érentes, sont bien cohérentes entre elles.
1.3.5 Approches tout-numérique
La résolution des équations des bistables peut être menée en utilisant des approches tout-numérique. Ceci permet de contourner la di�culté de résolution des équations des mécanismesbistables. Di�érentes approches existent.
On peut utiliser diverses équations de départ, dont les équations modales utilisées précé-demment pour les résoudre numériquement même sans analyse préalable. D'autres équations dedépart possibles sont les équations de l'elastica, comme [40], qui font intervenir un repère cur-viligne lié à la poutre. Il n'y a pas encore beaucoup de résultats pour les mécanismes bistables,mais ce type de méthode est très utilisé pour des mécanismes à grands déplacements, feuilles [43]ou tiges.
Le problème global de ce type de méthode est la convergence des algorithmes. Comment faireconverger des algorithmes quand plusieurs con�gurations sont possibles ? Une solution est debalayer un espace su�samment large pour trouver l'ensemble des solutions, mais pour l'instantces méthodes semblent moins robustes que les méthodes précédentes. Vu la vitesse des recherchesdans ce domaine, on peut penser que ceci ne durera qu'un temps.
Ce type d'approche se limite le plus souvent à des solutions stables et masque l'aspect bas-culement, pourtant très important pour le dimensionnement comme on l'a constaté. Il indique

1.3 Modèles des mécanismes bistables plans 19
si on choisit mal les variables un basculement instantané. Aucune indication n'est donnée surle comportement, puisque les équations sont optimisées pour le calcul et non la physique, etmasquent les phénomènes en jeu. Aussi nous avons préféré pour le moment une étude basée surl'analyse et non le seul calcul purement numérique.
1.3.6 Approches éléments �nis
Les calculs par éléments �nis font partie du tout-numérique, et donc partagent les défautsrelevés précédemment. On pourrait ajouter ici que l'étude éléments-�nis est très systématique,c'est son but, et on adapte le problème à l'outil plutôt qu'au problème à résoudre. Ceci donnerades résultats, surtout si on choisit bien les variables de pilotage, mais pas sur la physique du sys-tème. Ce type de méthode est limité et di�cile à mettre en place en cas de présence d'hystérésis,notamment pour la topologie modes 1 et 2 combinés qui fait intervenir des sauts de branche.
L'intérêt de cet outil est que sa facilité d'usage et son optimisation font qu'il est possible del'utiliser comme outil de véri�cation des calculs une fois qu'on sait ce que l'on cherche. Cettevalidation est couramment e�ectuée dans la littérature. Nous avons préféré dans ce travail fairedes validations expérimentales sur banc de test.
1.3.7 Approches expérimentales
Une autre démarche est expérimentale, consistant à réaliser des mécanismes bistables puis àles identi�er. Ils sont alors perçus comme des boites noires, et on détermine par identi�cation lescaractéristiques entrée-sortie nécessaires.
Cette démarche, classique pour les automaticiens, donne généralement de bons résultats. Ellepermet notamment de disposer de toute une panoplie d'outils de caractérisation dynamique qu'onne retrouve pas en mécanique théorique. De plus, on se base sur un mécanisme réel, et non unmodèle qui peut se révéler inadapté.
Comme cette approche se base sur l'utilisation et la caractérisation d'un mécanisme déjàexistant, elle est surtout destinée à l'étude de mécanismes �nis, et non pas à la conception denouveaux systèmes. Ce type d'approche est également non-phénoménologique, puisque de typeboite noire, et n'apporte pas d'outils de dimensionnement et de conception. C'est une approchequi permet surtout de déterminer ce qu'on peut obtenir avec un mécanisme existant, et estdestinée à l'optimisation.
1.3.8 Discussion sur les modèles
Les modèles sont très di�érents de par leurs usages et leurs qualités.Le modèle à deux barres - ressort est très simple et surtout très pédagogique. Il est cependant
assez peu performant et très éloigné de la réalité dès que l'on n'est plus en grands déplacements,comme dans le cas de tous les systèmes rigides.
Les modèles pseudo-rigides sont eux plus complexes et très performants en grands déplace-ments. Ils permettent surtout la conception de géométries optimisées, des études éléments-�nispermettent ensuite de valider les déformations maximales. C'est un excellent outil de conceptionpour des mécanismes ayant surtout des phénomènes géométriques en jeu, et en cas de grandsdéplacements.
Les modèles modaux sont en revanche très e�caces en petits déplacements, mais limités enterme de géométrie (régularité de la poutre. . .). Ils sont capables d'expliquer les phénomènes desingularités dus à la compression. Ils restent délicats à mettre en oeuvre, et la résolution deséquations est un point di�cile.
20 Présentation
Les modèles éléments �nis se révèlent excellents en validation quand on sait déjà ce quel'on cherche, mais peu appropriés pour une étude théorique à cause des soucis de bistabilité, denon-bijectivité et de convergence des algorithmes.
On voit qu'il y a plusieurs types de modèles. Il est important de retenir que le choix dumodèle est aussi le choix du type de mécanisme. Les modèles ne se recoupent pas et on n'aboutitpas sur le même type de mécanisme quand on change de modèle. Certains sont adaptés dans lecas des grands déplacements, d'autres des petits déplacements.
1.4 Les matériaux actifs
L'actionnement est un point qui est généralement peu ou pas discuté dans la littérature. Ets'il l'est, c'est souvent comme un point annexe, ou comme un élément séparé.
Pourtant, il y a un couplage entre la structure passive et son actionneur. Un actionneur estadapté à une structure, mais la structure aussi est adaptée à l'actionnement. Et c'est ici unpoint bloquant des mécanismes bistables, puisqu'il est di�cile de trouver des actionneurs depetites tailles capables d'actionner des structures bistables, qui restent très exigeantes en termed'énergie quelle que soit la taille. Ainsi, il est logique d'associer les deux dès que l'on veut faireune conception optimisée.
Dans ce travail, nous proposons d'actionner une structure bistable par un actionneur à basede matériau actif. Aussi, nous avons souhaité très tôt faire intervenir l'actionnement et intégrerl'e�et de celui-ci dans les modèles.
1.4.1 Plusieurs matériaux, une même famille
Le terme de � matériau actif � couvre plusieurs technologies. Ce sont des matériaux capablesde réagir mécaniquement à une modi�cation de leur environnement. Un changement de tempé-rature ou de champ électrique par exemple va se traduire par un travail mécanique du matériau,comme une élongation ou une �exion.
Ils pourront être utilisés comme capteurs, puisqu'ils réagissent à des changements de leurenvironnement, ou des actionneurs. En e�et, lorsqu'on est capable de modi�er l'environnementd'un matériau actif, a priori par un apport d'énergie, on peut récupérer un travail mécanique.C'est bien la dé�nition d'un actionneur, qui convertit de l'énergie provenant d'une source d'éner-gie non-mécanique en une énergie mécanique. Parce que ce sont des matériaux, ces actionneurspeuvent être utilisés à toutes échelles, le travail disponible étant fonction du type de matériau, del'énergie apportée mais surtout aussi de la taille de l'actionneur. Ainsi la capacité de l'actionneurest directement liée à son volume.
Ces actionneurs sont très intéressants dans les petites échelles. En e�et, les petits moteurssou�rent à ces échelles de leur di�culté d'assemblage et de fabrication. Au contraire, il n'est pasbeaucoup plus di�cile de réaliser un petit actionneur à base de matériau actif si on sait en faireun plus gros, il su�t de le couper. Il est pour la même raison plus facile à intégrer localement.
Plusieurs types de matériaux actifs existent, on va en citer quelques uns ci-dessous.
1.4.2 Divers matériaux actifs
Les alliages à mémoire de forme
L'e�et mémoire de forme est la capacité d'un matériau à retrouver une forme donnée initia-lement (on dit que le matériau a été éduqué pour une forme) après avoir subi une déformationplastique apparemment irréversible. On parle de matériau à mémoire de forme pour un maté-

1.4 Les matériaux actifs 21
riau qui possède cette propriété. On ne connaît aujourd'hui que des alliages qui possèdent cettepropriété, d'où l'appellation alliages à mémoire de forme (AMF).
(a) au repos (b) étiré (c) après chau�e
Fig. 1.24 � E�et mémoire de forme avec un ressort à mémoire de forme. Au repos (en (a)), on val'étirer (en (b)), puis le chau�er. Il reprend alors sa forme éduquée (en (c)). La carte publicitairedu fabricant est à peu près de la taille d'une carte de crédit.
L'e�et mémoire de forme a été découvert en 1932 par Chang et Read sur un alliage or-cadmium. Cet e�et fut ensuite observé en 1938 sur un alliage de cuivre-zinc. En 1963, il a étémis en évidence sur un alliage de nickel-titane, par le Naval Ordnance Laboratory (d'où le nomde NiTiNOL).
Microscopiquement, l'e�et mémoire de forme s'explique par un comportement assez parti-culier des réorganisations des variantes de martensites [4]. La chau�e du matériau permet derecréer l'austénite, qui en se transformant reformera la martensite dans son état éduqué. Ainsi,on retrouve la forme initiale par chau�e puis refroidissement, c'est l'e�et mémoire de forme.
Fig. 1.25 � Banc pour �l AMF [26]. Le �l est l'actionneur et se contracte lors de la chau�e. Onutilise ce type de banc pour mettre au point les asservissements de �ls AMF.

22 Présentation
Pour utiliser l'e�et mémoire de forme pour un actionneur, il faut déformer plastiquement àfroid un matériau à mémoire de forme. Comme on doit réorganiser les plaquettes de marten-site, il faut utiliser une extension élevée, de l'ordre de 1% à 8% en fonction de la durée de viesouhaitée pour un NiTiNol. On va ensuite le chau�er, ce qui correspond à l'apport d'énergie del'actionneur, et il aura tendance à revenir à sa forme initiale, créant un déplacement. On va à cemoment pouvoir lui adjoindre une charge, qui permettra d'obtenir une force d'actionnement (ouun couple). Ainsi, on récupère une force et un déplacement, la caractéristique d'un actionnement.
Comme on utilise un retour à la géométrie éduquée, on peut obtenir tous types de dépla-cements, typiquement des contractions/extensions mais aussi des �exions. Le montage le plusclassique est celui avec un �l chau�é [26], comme montré en Fig. 1.25. L'asservissement de telssystèmes est assez complexe et fait appel à des fonctions de contrôle de l'hystérésis complexes [25].
Comme ce sont des actionneurs thermiques, leur temps de réponse sera lié au temps ther-mique, donc de la conductivité thermique. Ils sont très lents. Par contre, leur force est liée à unerésistance matériau (en fait la mémoire de l'orientation réversible des plaquettes de martensite),ce qui donne des forces considérables. Ils sont peu e�caces (typiquement 2,5% de rendement)car on doit apporter une énergie correspondant à une transformation martensite/austénite lorsde l'actionnement, une énergie qui est majoritairement perdue. Du fait de leur grande force (lerapport entre la masse soulevée et leur masse propre peut atteindre 50 000), ils sont légers et peuencombrants.
Les piézoélectriques
La piézoélectricité est la propriété qu'ont certains matériaux de se polariser électriquementsous l'action d'une contrainte mécanique. Réciproquement, on peut déformer un matériau piézo-électrique en lui appliquant un champ électrique. Le premier e�et est appelé e�et piézoélectriquedirect, le second, qui est son e�et réciproque, est appelé e�et piézoélectrique inverse. On lesreprésente en Fig. 1.26.
La piézoélectricité a été découverte par les frères Curie à la toute �n du 19ème siècle. Lapremière application a été le sonar de Paul Langevin. On a depuis découvert des applicationsmoins belliqueuses, le quartz des montres, les allume-gaz. . . Ils sont aussi très utilisés en capteursde force et en microactionnement.
La piézoélectricité peut être basée sur plusieurs phénomènes physiques microscopiques, liésà la structure du matériau. On ne va pas les détailler ici, puisqu'on est plutôt des utilisateurs demécanismes conditionnés. L'actionnement piézoélectrique est aujourd'hui une technologie matureet on peut trouver de tels actionneurs dans le commerce.
Il y a plusieurs familles de produits. La première consiste en des plaques PZT (Titano-Zirconate de Plomb), la céramique piézoélectrique la plus exploitée, qui sont coupées en diversesformes, empilements ou simple couche, anneaux, benders (comme montré en Fig. 1.27). . . Géné-ralement, on nous fournit ainsi un matériau piézoélectrique équipé de deux plaques conductrices,les électrodes, qui permettent de générer un champ électrique dans le matériau [38]. Il ne restequ'à les assembler au système et à souder des cables d'alimentation électrique.
Cependant, les piézoélectriques sont très fragiles et donnent peu de déformation. On vaainsi trouver des fabricants qui proposent des solutions plus complètes, avec par exemples desmontages complets bender ou des encapsulages dans des structures métalliques (cf. Fig. 1.28),qui permettent d'avoir des actionneurs beaucoup plus solides ou avec une réponse mécaniquemodi�ée.
L'actionnement piézoélectrique étant un phénomène de conversion électro-mécanique, il serarapide, même très rapide. On crée aujourd'hui pratiquement toutes les ondes mécaniques avec dela piézoélectricité. Les capteurs de force les plus rapides sont aussi basés sur cette technologie. De
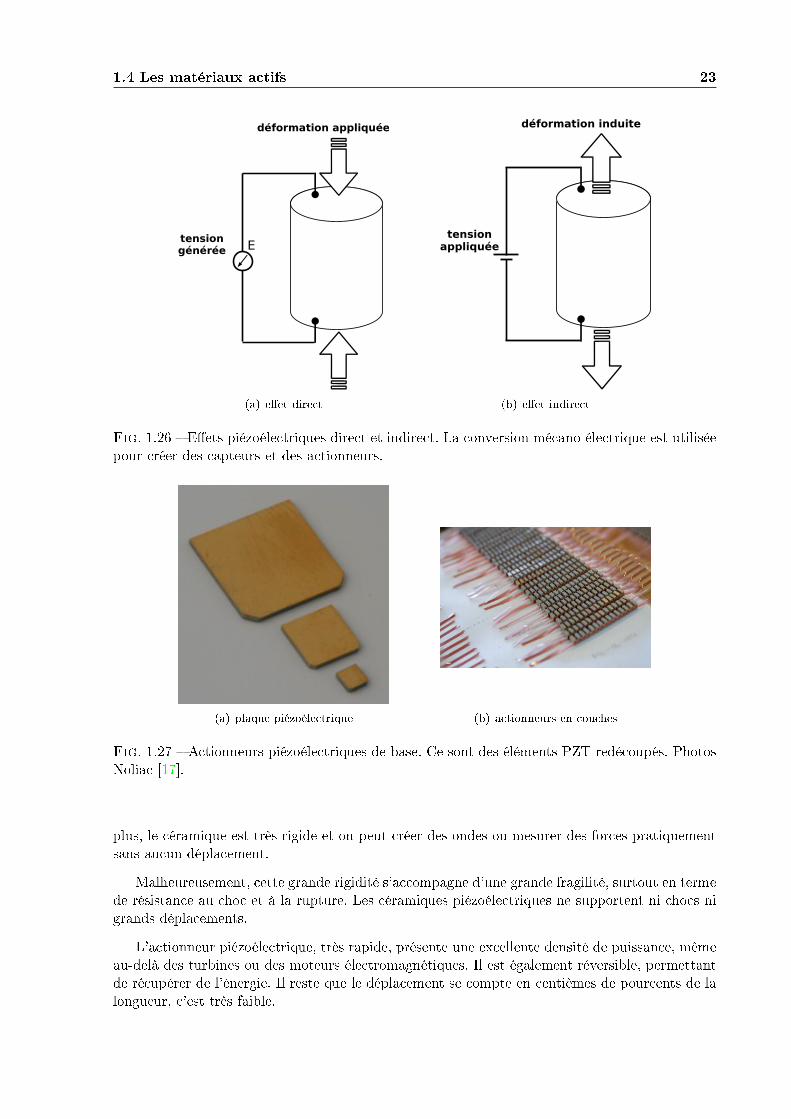
1.4 Les matériaux actifs 23
déformation appliquée
tensiongénérée E
(a) e�et direct
déformation induite
tensionappliquée
(b) e�et indirect
Fig. 1.26 � E�ets piézoélectriques direct et indirect. La conversion mécano-électrique est utiliséepour créer des capteurs et des actionneurs.
(a) plaque piézoélectrique (b) actionneurs en couches
Fig. 1.27 � Actionneurs piézoélectriques de base. Ce sont des éléments PZT redécoupés. PhotosNoliac [17].
plus, le céramique est très rigide et on peut créer des ondes ou mesurer des forces pratiquementsans aucun déplacement.
Malheureusement, cette grande rigidité s'accompagne d'une grande fragilité, surtout en termede résistance au choc et à la rupture. Les céramiques piézoélectriques ne supportent ni chocs nigrands déplacements.
L'actionneur piézoélectrique, très rapide, présente une excellente densité de puissance, mêmeau-delà des turbines ou des moteurs électromagnétiques. Il est également réversible, permettantde récupérer de l'énergie. Il reste que le déplacement se compte en centièmes de pourcents de lalongueur, c'est très faible.

24 Présentation
(a) système piézoélectrique bender (b) mécanisme piézoélectrique linéaire
Fig. 1.28 � Systèmes à actionnement piézoélectriques, basés sur un actionnement piézoélectrique.Photos respectivement P.I. [30] et D.S. [48].
Les composites à macro-�bres
Le problème de rigidité de la céramique a conduit à développer des actionnements à basede piézoélectricité di�érents. Les composites à macro-�bres (MFC pour Macro-Fiber Composite)sont de tels actionneurs. On les montre en Fig. 1.29. Ils ont été développés par le LangleyResearch Center de la NASA.
Ils ne ressemblent pas à un matériau actif, mais plutôt à un actionneur classique car ils sontfournis déjà conditionnés. Pourtant c'est un actionneur par matériau actif basé sur la technologiepiézoélectrique, comme montré en Fig. 1.31. Du point de vue utilisateur, c'est un actionneurqui va s'allonger de quelques dixièmes de pourcents et se contracter sous l'e�et d'une tension.On notera que sa capacité d'élongation est environ trois fois plus grande que sa capacité decontraction, à cause de sa fabrication assez particulière.
Les MFC sont de part leur construction orthotropes. Usinés de façon très particulière, ilspeuvent supporter d'importantes �exions, donnent de grandes élongations, et sont beaucoupmoins fragile. Cependant, ils apportent moins de force que leurs équivalents monolithiques,puisque la technologie est la même et qu'on ne peut pas changer fondamentalement l'énergievolumique qu'ils peuvent apporter. L'un de leurs grands intérêts est leur capacité à supporterdes grandes �exions, ainsi on peut créer des systèmes très di�érents de ce que l'on peut obte-nir avec des actionneurs électromagnétiques classiques, et obtenir des mécanismes extrêmementplats.
On donne en Fig. 1.30 le principe de fabrication de la couche piézoélectrique. Cette imageest issue d'une présentation de la NASA [56]. On voit que l'une des particularités est que lacouche piézoélectrique est rainurée. Ainsi, cet actionneur est bien plus évolué qu'un actionneur� massif �.
Les MFC sont ensuite créés en assemblant plusieurs couches (cf. Fig. 1.31). La couche activecitée précédemment est située au centre, puis couverte sur chaque face d'une couche de protectionqui vient notamment contenir les �ssures. Puis une couche électrode permet de créer le champ

1.4 Les matériaux actifs 25
Fig. 1.29 � Présentation des MFC (à gauche) et illustration de leur souplesse (à droite). Lacomparaison avec un piézoélectrique standard est très �atteuse. Cependant, ce n'est que la dé-formation admissible passivement, pas la déformation active. Au �nal, l'énergie volumique desMFC est même inférieure à celle d'un actionneur piézoélectrique massif.
électrique. On lui ajoute ensuite deux couches de protection, non représentées sur le schémaprécédent.
Deux familles de composites macro-�bres coexistent, une avec une tension de commande trèsélevée (de l'ordre du kV) et une autre avec des tensions plus faibles (de plusieurs centaines devolts). La première catégorie apporte une meilleure énergie volumique, aussi c'est celle-ci quenous avons utilisée majoritairement par la suite.
Le fait d'utiliser un actionneur près à l'emploi et très bien �ni permet de ne pas trop s'in-téresser à la technique de réalisation mais plutôt à son usage. C'est basiquement un actionneurlinéaire très �exible (cf. Fig. 1.29), qui peut apporter des déformations linéaires de l'ordre dudixième du pourcent de sa longueur avec des forces assez réduites (au contraire du piézoélectrique� massif �). Il est par contre extrêmement bien protégé contre les dégradations externes et peutêtre employé dans des conditions très di�ciles, comme l'aéronautique ou le spatial, son usagepremier.
Les IPMC (ionic polymer-metal composites) et les polymères électro-actifs
Les actionneurs à polymères actifs (ou EAP pour Electro-Active Polymer) sont une classeassez variée d'actionneurs, basés sur une réaction chimique. Le principe est ici de créer un champélectrique, qui va entraîner une réaction chimique d'oxydoréduction ou un déplacement d'ions autravers d'une matrice. Le déplacement d'ions ou l'oxydoréduction entraîne une surconcentrationde matière d'un coté de l'élément, ce qui crée une �exion, comme montré en Fig. 1.34 dans lecas d'un IPMC.
Ce type d'actionneur est donc un transformateur électro-chimico-mécanique, qui apporte une�exion sous l'e�et d'une tension faible, typiquement de quelques volts. Le temps de réponse estpeu rapide, avec une vitesse de quelques Hertz. Il y a aussi de nombreux phénomènes de viscosité

26 Présentation
Fig. 1.30 � Fabrication de la couche piézoélectrique des MFC. Les MFC utilisent une géométrieparticulière pour être �exibles et apporter de plus grandes déformations. Ils sont aussi orthotro-piques, ne se déformant que dans une direction comme actionneur.
Fig. 1.31 � Structure des MFC. Chaque couche est spécialisée, e�et piézoélectrique, protectioncontre les déformations, création du champ électrique.

1.4 Les matériaux actifs 27
(a) au repos
(b) actionné
Fig. 1.32 � Principe de fonctionnement des IPMC. Un déplacement des ions et du solvant souschamp électrique modi�e la forme du matériau [46].
Fig. 1.33 � Pince en IPMC [3].
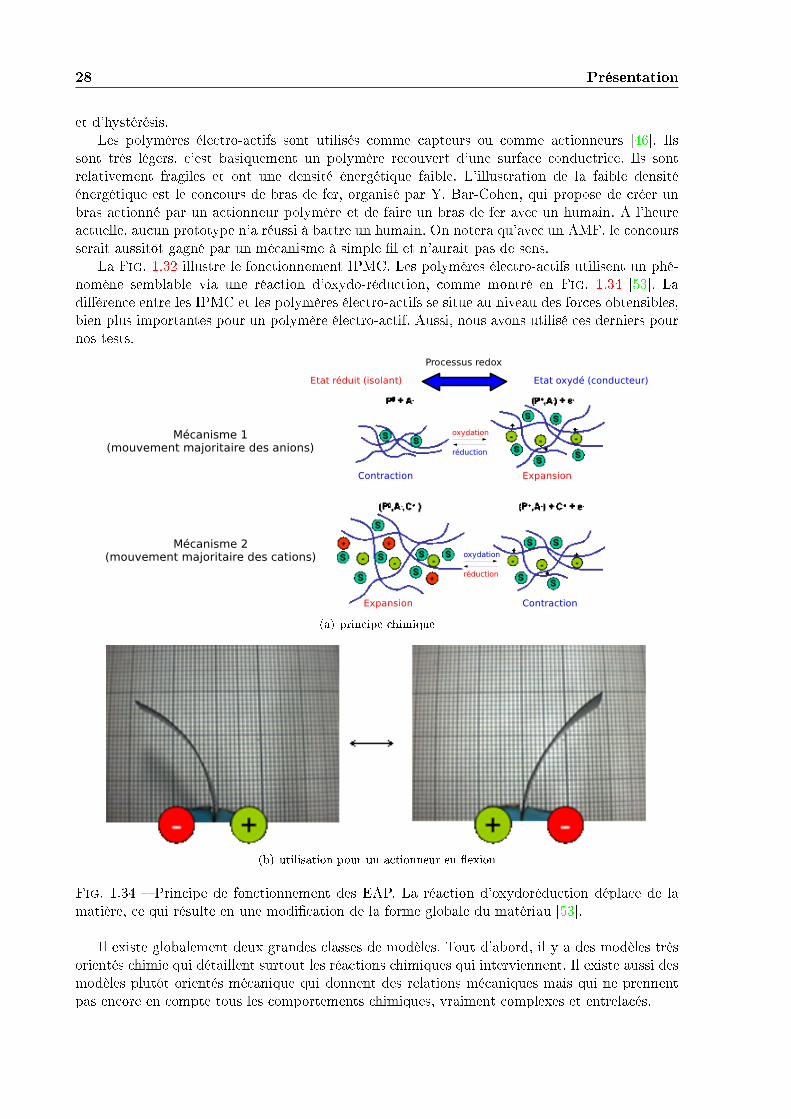
28 Présentation
et d'hystérésis.Les polymères électro-actifs sont utilisés comme capteurs ou comme actionneurs [46]. Ils
sont très légers, c'est basiquement un polymère recouvert d'une surface conductrice. Ils sontrelativement fragiles et ont une densité énergétique faible. L'illustration de la faible densitéénergétique est le concours de bras de fer, organisé par Y. Bar-Cohen, qui propose de créer unbras actionné par un actionneur polymère et de faire un bras de fer avec un humain. A l'heureactuelle, aucun prototype n'a réussi à battre un humain. On notera qu'avec un AMF, le concoursserait aussitôt gagné par un mécanisme à simple �l et n'aurait pas de sens.
La Fig. 1.32 illustre le fonctionnement IPMC. Les polymères électro-actifs utilisent un phé-nomène semblable via une réaction d'oxydo-réduction, comme montré en Fig. 1.34 [53]. Ladi�érence entre les IPMC et les polymères électro-actifs se situe au niveau des forces obtensibles,bien plus importantes pour un polymère électro-actif. Aussi, nous avons utilisé ces derniers pournos tests.
(a) principe chimique
(b) utilisation pour un actionneur en �exion
Fig. 1.34 � Principe de fonctionnement des EAP. La réaction d'oxydoréduction déplace de lamatière, ce qui résulte en une modi�cation de la forme globale du matériau [53].
Il existe globalement deux grandes classes de modèles. Tout d'abord, il y a des modèles trèsorientés chimie qui détaillent surtout les réactions chimiques qui interviennent. Il existe aussi desmodèles plutôt orientés mécanique qui donnent des relations mécaniques mais qui ne prennentpas encore en compte tous les comportements chimiques, vraiment complexes et entrelacés.
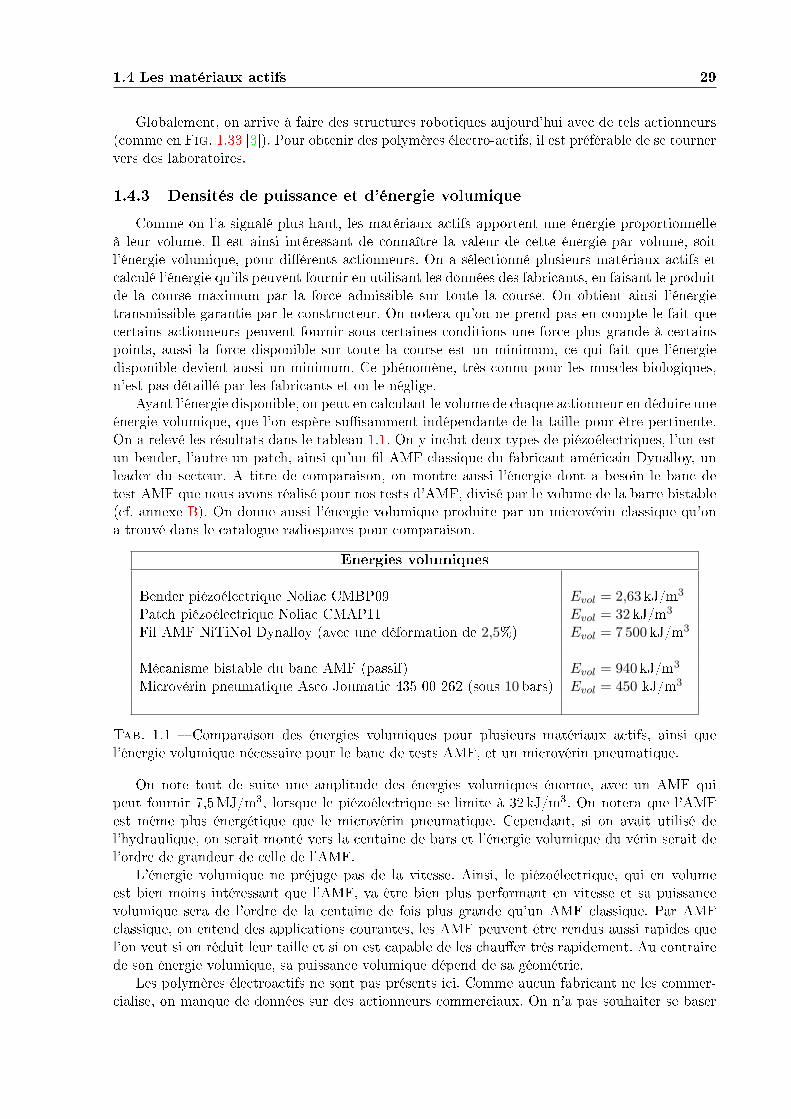
1.4 Les matériaux actifs 29
Globalement, on arrive à faire des structures robotiques aujourd'hui avec de tels actionneurs(comme en Fig. 1.33 [3]). Pour obtenir des polymères électro-actifs, il est préférable de se tournervers des laboratoires.
1.4.3 Densités de puissance et d'énergie volumique
Comme on l'a signalé plus haut, les matériaux actifs apportent une énergie proportionnelleà leur volume. Il est ainsi intéressant de connaître la valeur de cette énergie par volume, soitl'énergie volumique, pour di�érents actionneurs. On a sélectionné plusieurs matériaux actifs etcalculé l'énergie qu'ils peuvent fournir en utilisant les données des fabricants, en faisant le produitde la course maximum par la force admissible sur toute la course. On obtient ainsi l'énergietransmissible garantie par le constructeur. On notera qu'on ne prend pas en compte le fait quecertains actionneurs peuvent fournir sous certaines conditions une force plus grande à certainspoints, aussi la force disponible sur toute la course est un minimum, ce qui fait que l'énergiedisponible devient aussi un minimum. Ce phénomène, très connu pour les muscles biologiques,n'est pas détaillé par les fabricants et on le néglige.
Ayant l'énergie disponible, on peut en calculant le volume de chaque actionneur en déduire uneénergie volumique, que l'on espère su�samment indépendante de la taille pour être pertinente.On a relevé les résultats dans le tableau 1.1. On y inclut deux types de piézoélectriques, l'un estun bender, l'autre un patch, ainsi qu'un �l AMF classique du fabricant américain Dynalloy, unleader du secteur. A titre de comparaison, on montre aussi l'énergie dont a besoin le banc detest AMF que nous avons réalisé pour nos tests d'AMF, divisé par le volume de la barre bistable(cf. annexe B). On donne aussi l'énergie volumique produite par un microvérin classique qu'ona trouvé dans le catalogue radiospares pour comparaison.
Energies volumiques
Bender piézoélectrique Noliac CMBP09 Evol = 2,63 kJ/m3
Patch piézoélectrique Noliac CMAP11 Evol = 32 kJ/m3
Fil AMF NiTiNol Dynalloy (avec une déformation de 2,5%) Evol = 7500 kJ/m3
Mécanisme bistable du banc AMF (passif) Evol = 940 kJ/m3
Microvérin pneumatique Asco Joumatic 435 00 262 (sous 10 bars) Evol = 450 kJ/m3
Tab. 1.1 � Comparaison des énergies volumiques pour plusieurs matériaux actifs, ainsi quel'énergie volumique nécessaire pour le banc de tests AMF, et un microvérin pneumatique.
On note tout de suite une amplitude des énergies volumiques énorme, avec un AMF quipeut fournir 7,5MJ/m3, lorsque le piézoélectrique se limite à 32 kJ/m3. On notera que l'AMFest même plus énergétique que le microvérin pneumatique. Cependant, si on avait utilisé del'hydraulique, on serait monté vers la centaine de bars et l'énergie volumique du vérin serait del'ordre de grandeur de celle de l'AMF.
L'énergie volumique ne préjuge pas de la vitesse. Ainsi, le piézoélectrique, qui en volumeest bien moins intéressant que l'AMF, va être bien plus performant en vitesse et sa puissancevolumique sera de l'ordre de la centaine de fois plus grande qu'un AMF classique. Par AMFclassique, on entend des applications courantes, les AMF peuvent être rendus aussi rapides quel'on veut si on réduit leur taille et si on est capable de les chau�er très rapidement. Au contrairede son énergie volumique, sa puissance volumique dépend de sa géométrie.
Les polymères électroactifs ne sont pas présents ici. Comme aucun fabricant ne les commer-cialise, on manque de données sur des actionneurs commerciaux. On n'a pas souhaiter se baser

30 Présentation
sur des tests non-reproductibles de polymères électro-actifs. Cependant, leur énergie volumiquereste clairement faible.
On n'a pas mis de comparaison d'énergie volumique avec un moteur rotatif, électromagné-tique, à explosion ou une turbine. En e�et, ces moteurs peuvent tourner indé�niment et ont unecourse illimitée, donc une énergie volumique in�nie (tant qu'on peut leur apporter de l'énergie).Ces types de moteurs rotatifs ne sont limités qu'en puissance volumique.
1.4.4 Dimensionnement par calcul de l'énergie volumique
Pour dimensionner l'actionneur d'un système mécanique, il existe une méthode basée surl'énergie volumique. Le principe est de dé�nir l'énergie nécessaire, par exemple dans le cas d'unactionneur linéaire en faisant le produit force-déplacement. On obtient ainsi une énergie. Si ondivise celle-ci par la valeur d'énergie volumique de l'actionneur (qui est assez indépendante de lataille), on obtient le volume d'actionneur nécessaire.
Cette méthode est analogue à la méthode de dimensionnement d'un moteur par puissance, oùl'on calcule la puissance dissipée pour choisir le moteur. On installe ensuite un étage intermédiairede motoréduction pour obtenir le couple et/ou la vitesse choisie. De même, si on dimensionne parénergie, on ajoute un système du type bras de levier pour avoir le couple force/course nécessaire.
Il faut lorsqu'on utilise cette approche prendre en compte les pertes d'e�cacité volumique.On peut l'illustrer avec le cas du bender, donné en Fig. 1.35. Pour un actionneur linéaire, toutle volume du matériau se déforme de façon homogène. Au contraire, dans le cas du bender, lamatière autour de la ligne moyenne sera beaucoup moins sollicitée que la surface. Globalement,seul la moitié de la capacité de déformation de l'actionneur est utilisée. On doit aussi prendre encompte le supplément de rigidité structurelle du matériau actif.
(a) cas de l'actionneur direct
(b) cas du bender
Fig. 1.35 � Actionneurs direct et bender. Dans le cas du bender, la moitié de l'énergie volumiqueest perdue car la matière autour de la ligne moyenne ne se déforme pas.
Une autre source de diminution d'énergie volumique est liée à l'adéquation entre les courbesforce/déplacement de l'actionneur et celle de la structure à actionner. L'actionneur étant choisipour être capable d'actionner sur toute sa course, il peut y avoir des parties de sa course oùil est surdimensionné par rapport à la structure réceptrice, surtout s'il existe des pics de forcenécessaire le long de la course de la structure réceptrice.
Immédiatement, cette méthode nous donne une idée de la taille de l'actionneur par rapportà la taille de la structure. Dans le cas de l'actionnement de notre banc de test AMF, l'action-neur a une énergie volumique comparable à celle de la structure. Au contraire, pour ces mêmes
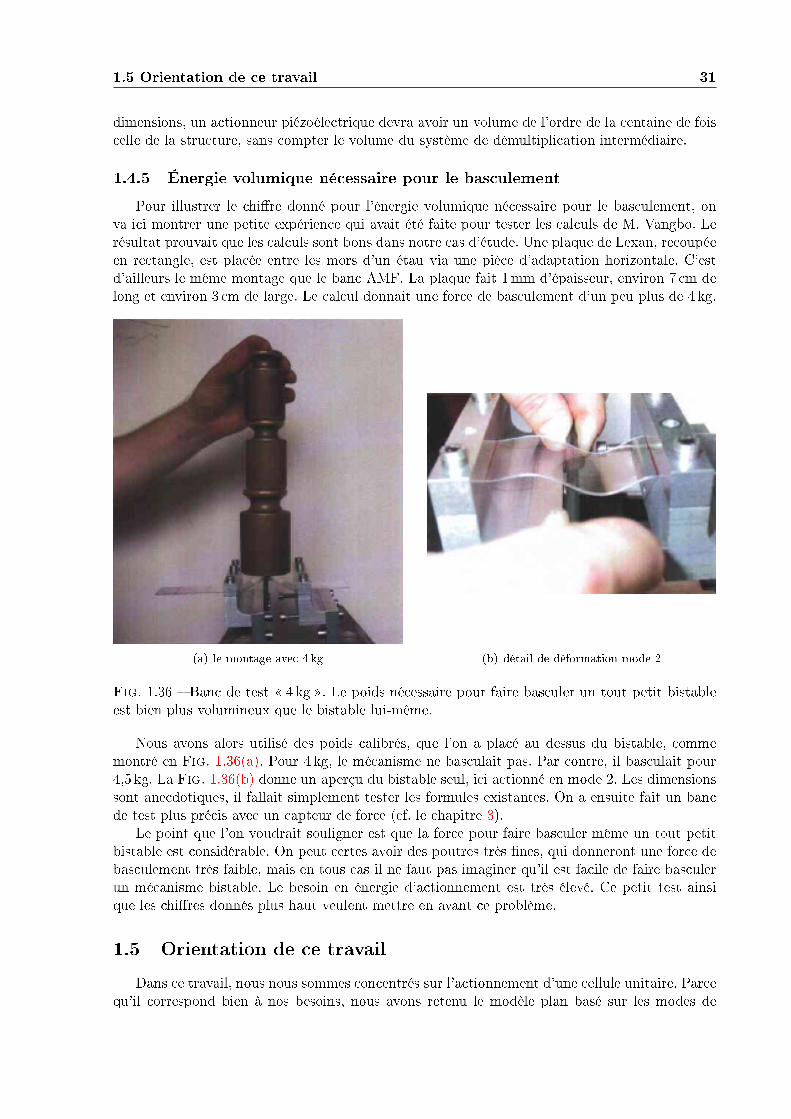
1.5 Orientation de ce travail 31
dimensions, un actionneur piézoélectrique devra avoir un volume de l'ordre de la centaine de foiscelle de la structure, sans compter le volume du système de démultiplication intermédiaire.
1.4.5 Énergie volumique nécessaire pour le basculement
Pour illustrer le chi�re donné pour l'énergie volumique nécessaire pour le basculement, onva ici montrer une petite expérience qui avait été faite pour tester les calculs de M. Vangbo. Lerésultat prouvait que les calculs sont bons dans notre cas d'étude. Une plaque de Lexan, recoupéeen rectangle, est placée entre les mors d'un étau via une pièce d'adaptation horizontale. C'estd'ailleurs le même montage que le banc AMF. La plaque fait 1mm d'épaisseur, environ 7 cm delong et environ 3 cm de large. Le calcul donnait une force de basculement d'un peu plus de 4 kg.
(a) le montage avec 4 kg (b) détail de déformation mode 2
Fig. 1.36 � Banc de test � 4 kg �. Le poids nécessaire pour faire basculer un tout petit bistableest bien plus volumineux que le bistable lui-même.
Nous avons alors utilisé des poids calibrés, que l'on a placé au dessus du bistable, commemontré en Fig. 1.36(a). Pour 4 kg, le mécanisme ne basculait pas. Par contre, il basculait pour4,5 kg. La Fig. 1.36(b) donne un aperçu du bistable seul, ici actionné en mode 2. Les dimensionssont anecdotiques, il fallait simplement tester les formules existantes. On a ensuite fait un bancde test plus précis avec un capteur de force (cf. le chapitre 3).
Le point que l'on voudrait souligner est que la force pour faire basculer même un tout petitbistable est considérable. On peut certes avoir des poutres très �nes, qui donneront une force debasculement très faible, mais en tous cas il ne faut pas imaginer qu'il est facile de faire basculerun mécanisme bistable. Le besoin en énergie d'actionnement est très élevé. Ce petit test ainsique les chi�res donnés plus haut veulent mettre en avant ce problème.
1.5 Orientation de ce travail
Dans ce travail, nous nous sommes concentrés sur l'actionnement d'une cellule unitaire. Parcequ'il correspond bien à nos besoins, nous avons retenu le modèle plan basé sur les modes de

32 Présentation
�ambement. Ceci permet d'étudier des systèmes rigides.A�n de pouvoir modéliser la plus grande variété d'actionnements possibles, nous avions besoin
d'un modèle polyvalent. Les modèles de la littérature se sont limités à l'actionnement central, cequi n'est pas su�sant pour nos besoins. Nous avons étendu ce modèle pour pouvoir l'adapter àdi�érents cas d'actionnement, comme développé dans les chapitres suivants.
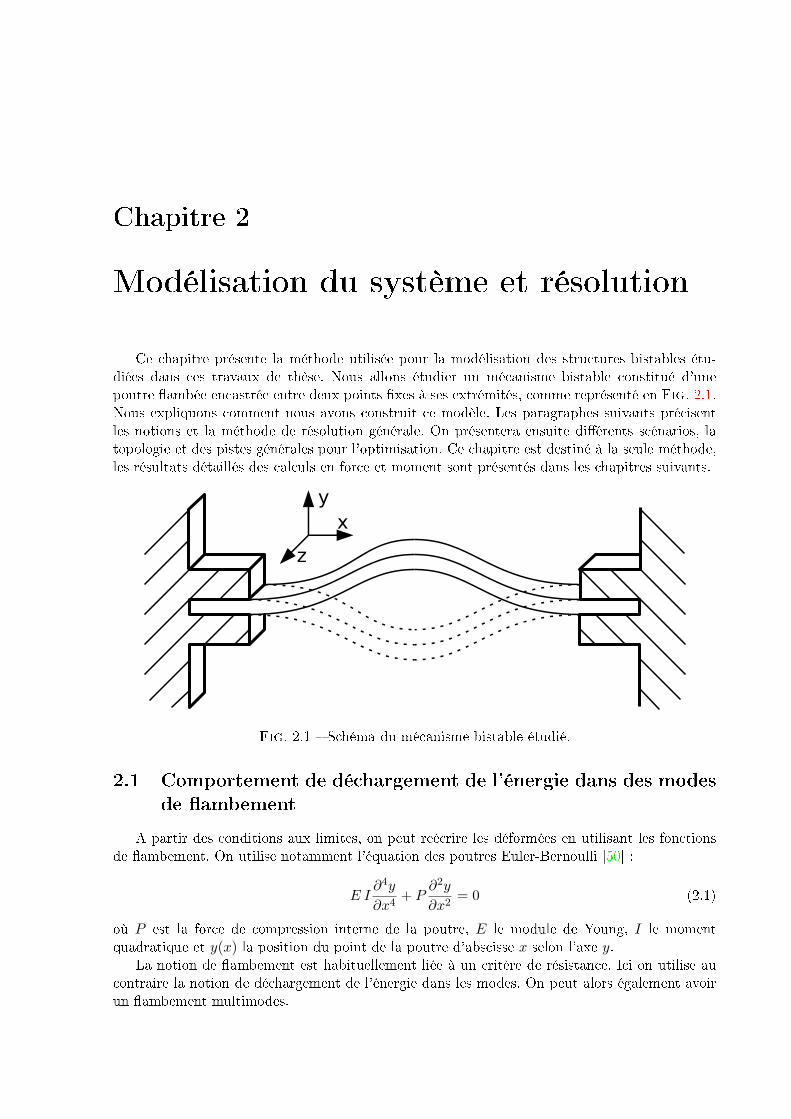
Chapitre 2
Modélisation du système et résolution
Ce chapitre présente la méthode utilisée pour la modélisation des structures bistables étu-diées dans ces travaux de thèse. Nous allons étudier un mécanisme bistable constitué d'unepoutre �ambée encastrée entre deux points �xes à ses extrémités, comme représenté en Fig. 2.1.Nous expliquons comment nous avons construit ce modèle. Les paragraphes suivants précisentles notions et la méthode de résolution générale. On présentera ensuite di�érents scénarios, latopologie et des pistes générales pour l'optimisation. Ce chapitre est destiné à la seule méthode,les résultats détaillés des calculs en force et moment sont présentés dans les chapitres suivants.
x
z
y
Fig. 2.1 � Schéma du mécanisme bistable étudié.
2.1 Comportement de déchargement de l'énergie dans des modesde �ambement
A partir des conditions aux limites, on peut reécrire les déformées en utilisant les fonctionsde �ambement. On utilise notamment l'équation des poutres Euler-Bernoulli [50] :
E I∂4y
∂x4+ P
∂2y
∂x2= 0 (2.1)
où P est la force de compression interne de la poutre, E le module de Young, I le momentquadratique et y(x) la position du point de la poutre d'abscisse x selon l'axe y.
La notion de �ambement est habituellement liée à un critère de résistance. Ici on utilise aucontraire la notion de déchargement de l'énergie dans les modes. On peut alors également avoirun �ambement multimodes.

34 Modélisation
Le déchargement dans les modes est liée à un équilibre entre l'énergie de �ambement et decompression. On sait qu'à partir d'une certaine compression [50], l'énergie de �ambement serainférieure à l'énergie de compression. C'est en ceci que l'énergie de compresssion se décharge dansles modes, comme illustré en Fig. 2.2.
Etat instable comprimé
Flambement mode 1
Flambement mode 2 (instable)
Compression
F
Fig. 2.2 � Principe du déchargement d'énergie dans les modes.
A partir du schéma physique précédent, on va résoudre les équations en deux étapes. Lapremière étape ne prend par en compte la précompression et est faite sur une poutre sans énergiede compression. La déformée utilisée dans cette étape est yp, et la solution est linéaire par rapportà la déformation. Dans un second temps, on comprime la poutre, ce qui introduit la possibilitéde �ambement selon les modes 1 et 2. On utilise alors une solution plus complète venant des loisdes applications non-bijectives telle que :
y = ygen + yp (2.2)
avec ygen une solution du noyau, et yp une solution particulière.La solution du noyau étant composée d'une combinaison des déformations modes 1 et 2, on
aura :
y = ygen + yp où ygen =2∑
i=1
ai yi, (2.3)
avec yi fonction générale (de �ambement).
2.2 Résolution du système
La méthode de résolution présentée ici consiste à :� Choisir et isoler le système.� Déterminer les fonctions de �ambement.� Ecrire les équations d'équilibre de la solution particulière, la déterminer.� Ecrire la forme de la solution complète.� Ecrire l'énergie du système associée à la déformée.� Minimiser l'énergie du système pour déterminer les solutions d'équilibre.� A partir des solutions trouvées, extraire les sorties du mécanisme et formuler les lois en-trées/sorties.
C'est une méthode basée sur la minimisation de l'énergie du système. Tous les phénomènesdoivent alors être étudiés par leur aspect énergétique. En e�et, les mécanismes bistables, en tantque systèmes élastiques (compliant systems en anglais), accumulent et restituent de l'énergie lors

2.2 Résolution du système 35
de leur déformation. De ce fait, il est extrêmement pratique et e�cace d'utiliser l'énergie commeun moyen de dé�nir tout phénomène que subit la poutre.
L'idée de base est celle d'une chronologie de transmission d'énergie. Comme montré enFig. 2.2, la poutre est tout d'abord droite (on peut aussi avoir le cas d'une poutre prédéfor-mée), puis comprimée. Elle va alors utiliser les modes de �ambement pour minimiser son énergieinterne. Seul le mode 1 est utilisé, le moins énergétique.
Dans le cas d'un système bistable actionné, comme en Fig. 2.3, on a tout d'abord une poutredroite (1), que l'on va actionner (2), ce qui induit une déformation. Cette solution d'équilibresera aussi utilisée comme solution particulière de l'Eq. 2.3. Ensuite, on comprime la poutre (3).En termes de calcul on introduit l'énergie de compression. La poutre va alors utiliser les modes de�ambement pour diminuer son énergie (4 et 4'), étape qui correspond à la résolution du systèmed'équations par minimisation de l'énergie. La topologie fait que le �ambement qui en est issu estune combinaison des modes 1 et 2. On le constate expérimentalement ou en testant la réponse dusystème avec plus de deux modes (en section 2.6.1). C'est en ceci que la méthode de résolutionutilisée ici est directement liée à la physique de ces mécanismes.
Etat instable comprimé
Flambement mode 1
Flambement mode 2
Compression
Actionnement
Fact
1
2
3
4
4'F
Fact
Fig. 2.3 � Principe de déchargement de l'énergie, système actionné. C'est aussi la chronologiede la méthode de résolution employée ici.
La plupart des développements qui suivent utilisent le cas de l'actionnement par une forcenormale à la barre. Cependant, la méthode est polyvalente et convient à tous types d'actionne-ments, comme nous le montrons pour les cas de l'actionnement en moment, par exemple.
2.2.1 Choix du système, isolement
Le système bistable est dé�ni par un jeu de 4 paramètres et des caractéristiques du matériau(notamment le module de Young E).
Le jeu de paramètre géométrique (montré en Fig. 2.4) est :� la longueur à vide l0.� la largeur b.� l'épaisseur h.� la longueur après compression l.On peut également utiliser des paramètres di�érents, qui permettront des adimensionnements
divers (il faut quatre paramètres). Par exemple, on peut prendre le jeu suivant, qui est lié àl'énergie :
� la longueur après compression l.

36 Modélisation
l0
l
b h
Fig. 2.4 � Paramétrage de la poutre avec un jeu de paramètres géométriques.
� la largeur b.
� l'énergie de basculement en compression pure12A E ε2 avec ε =
s− l0l
et A l'aire avec
A = b h.
� la force critique de �ambement du premier modeE I π2
l2avec I le moment quadratique,
soit I =b h3
12ici.
Le choix d'un jeu de paramètre géométrique est le plus immédiat ici, mais comme l'a montréM.Vangbo [54], le rapport entre l'énergie de �ambement et l'énergie de compression est fonda-mental pour la compréhension du type de basculement, voire pour des cas non-symétriques [42]pour le caractère bistable ou non de la poutre. Nous avons utilisé malgré tout le jeu de paramètresgéométriques dans ce travail.
Il s'agit à présent de procéder à l'isolement du système. On va ici isoler le système avec sesactionneurs, avec les extrémités (les murs) qui sont supposés être indéformables, c'est à direen terme énergétique des réservoirs d'énergie. La quantité d'énergie qu'ils contiennent est alorsconstante et n'in�ue pas sur la dérivée de l'énergie du système. Ils n'auront pas d'in�uence surle mécanisme.
En�n, on dé�nit :y(x) la forme de la barre entre 0 et l (2.4)
On peut dé�nir la déformée comme une fonction grâce à l'hypothèse des petits déplacements,qui implique qu'il n'y ait pas de point de rebroussement.
2.2.2 Détermination des fonctions de �ambement
On va ici chercher à exprimer les fonctions de �ambement yi. On pourra par la suite faireappel à ces fonctions directement sans les recalculer à chaque étape.
Les fonctions de �ambement sont ici les fonctions du noyau. En e�et, ce sont des fonctionstelles que les e�orts/moments extérieurs ne sont pas pris en compte, c'est à dire mis à zéro.Ces fonctions sont le moyen pour la structure de décharger son énergie de compression dans del'énergie de �ambement lorsque ceci permet de minimiser l'énergie totale.
On obtient ces fonctions en utilisant les équations d'équilibre en �exion. Ceci nous donneune famille de fonctions de �ambement, qui génèrent une base pour laquelle l'énergie critiqueassociée à chaque mode est strictement et in�niment croissante.
La démarche consiste à déterminer un critère d'équilibre pour la poutre �ambée et à l'utiliserpour déterminer les fonctions de �ambement. On peut également en déduire l'énergie critiqueassociée à chaque mode, qui est l'énergie nécessaire pour �amber dans le mode donné.

2.2 Résolution du système 37
N.B. : Les résultats numériques font apparaître des coe�cients croisés entre les modes de�ambement. Pourtant, la base de �ambement est telle que les dérivées des fonctions génératricessont orthogonales entre elles (la démonstration peut se faire géométriquement). Ce phénomèneest donc uniquement dû à l'usage de l'outil numérique.
On obtient �nalement un ensemble de fonctions de ce type :
Fig. 2.5 � Les premières fonctions de �ambement dans le cas d'un montage encastré-encastré.
2.2.3 Écriture du travail des actionneurs
Comme pour la structure, on utilise l'énergie pour modéliser le comportement des actionneurs.On les modélise ainsi comme des sources d'énergie. On utilise le travail de l'actionneur pour dé�nircette énergie d'actionnement.
F d
(a) force
Mϴ
(b) moment
Fig. 2.6 � Schémas d'actionnement en force (a) et pour un couple (b) pour un actionnementexterne.
Si on utilise un actionnement en force, son travail sera dé�ni par
UF = −∫
F (y) dx (2.5)
où F est la force et∫
dy le déplacement in�nitésimal de la poutre au point d'application de laforce. Cependant, et parce que l'énergie d'actionnement sera au �nal dérivée pour obtenir lespoints d'équilibre, on peut substituer à l'équation précédente la formule suivante :
UF = −F d (2.6)
où d est le déplacement total (soit∫
dy), tel que montré en Fig. 2.6(a). Bien que les équations nesoient pas équivalentes et que la seconde ne donne pas la bonne valeur d'énergie, on obtiendra

38 Modélisation
le même résultat pour la dérivée, qui est seule utilisée par la suite pour trouver les positionsd'équilibre.
De même, un actionnement couple sera modélisé par
UM = −∫
M(θ)dθ ' −Mθ (2.7)
où M est le couple et θ la rotation de la poutre au point d'application du couple tel que montré
en Fig. 2.6(b). Sous l'hypothèse des petits déplacements, on aura θ'y′ =∂y
∂x.
Un autre type d'actionnement est l'actionnement interne. On l'obtient lorsque l'actionnementest lié à la poutre, par exemple pour un actionneur collé ou une structure monolithique, où lastructure est elle-même un actionneur comme une poutre en polymère électroactif. Dans ce cas,il y a plusieurs possibilités. Il est possible d'utiliser un couple externe équivalent [22] ou d'utiliserl'état déformé de la poutre comme état libre d'un système passif équivalent sans actionnement.Si on utilise cette dernière approche, la structure se comporte comme s'il n'y avait pas d'action-nement, donc pas de travail d'un actionneur, on doit simplement déterminer la forme modi�éepar l'actionnement.
Par exemple, pour une poutre en polymère électroactif, qui crée un actionnement coupledistribué constant tout le long de la structure, si on note y0(x) la forme actionnée et yini(x) laforme libre avant actionnement (par exemple yini(x)= 0 pour une poutre droite), on obtiendrapour la seconde dérivée
y′′0(x) = y′′ini(x)− Md(x)EI
(2.8)
où E est le module de Young du matériau, I le moment quadratique, et Md le couple distribué.Cet y′′0 peut ensuite être réutilisé dans les formules d'énergie de �exion comme expliqué par lasuite. Il est également possible d'utiliser un y0 pour un état actionné et un autre pour un étatnon-actionné, typiquement pour un alliage à mémoire de forme qui présente deux états di�érentsen fonction de la température (e�et mémoire de forme).
En�n, s'il y a plusieurs actionneurs, il est plus simple de séparer l'e�et de chacun, la déforma-tion sera sous l'hypothèse des petites perturbations la somme des déformées induites par chaqueactionneur et on aura alors pour l'énergie :
Uact =∑
i
Uact,i (2.9)
où i indexe les actionneurs et Uact,i est l'énergie associée au travail de l'actionneur i.
2.2.4 Détermination de la solution particulière
Il est di�cile de déterminer une solution particulière sur le système réel, c'est à dire unesolution stable pour une force non nulle. On cherche alors une solution sur un système virtuel.Ici, on va chercher une solution dans un système identique au système d'étude mais où l'onsupprime l'énergie de compression. Cette solution est toujours une solution d'équilibre, mais estune solution instable à cause du phénomène de �ambement. On va donc chercher une solutiondu système où Utot = Uact +Uf avec Uact et Uf respectivement les énergies dues à l'actionnementet à la �exion.On écrit la déformée sous la forme :
yp =20∑i=1
ai yi (2.10)

2.2 Résolution du système 39
On pourrait aussi utiliser un ordre di�érent de 20. Celui-ci est bien plus grand que nécessaire.C'est un choix arbitraire qui sera conservé tout au long de ce travail. On écrit maintenant leséquations de �exion et de travail des forces extérieures.L'énergie due à la �exion s'écrit :
Uf =E I
2
∫ l
0y′′p(x)2 dx (2.11)
L'énergie due à l'actionnement Uact, ici due à la force extérieure, est l'opposée du travail de cetteforce soit :
Uact = UF = −F yp(a) (2.12)
On peut alors écrire l'énergie totale du mécanisme :
Utot = Uf + Uact (2.13)
On minimise l'énergie par rapport aux amplitudes de déformations1 :
∀i ∈ [[1, 20]],∂Utot
∂ai= 0 (2.14)
On résout ce système pour réintégrer ensuite la liste (ai)i∈[[1,20]] de l'Eq. 2.10.
Exemple de courbes obtenues :On trace ci-après (en Fig. 2.7) trois exemples de courbes obtenues pour une force normale
de 1N en di�érents points de la barre.
(a) Courbe d'équilibre avec appuien l/2.
(b) Courbe d'équilibre avec appuien l/4.
(c) Courbe d'équilibre avec appuien l/8.
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.7 � Courbes d'équilibre pour di�érentes positions de la force d'appui (avec F =1N).
En pratique, on détermine les coe�cients (ai) pour un actionnement unitaire (par exemplepour une force F de 1N). Ceci permet d'avoir les (ai) pour tout actionnement en multipliant parla valeur de l'excitation appliquée. En e�et, les coe�cients (ai) sont proportionnels à la force, cf.les équations Eq. 2.12 et Eq. 2.13. Par ailleurs, on met les coe�cients a1 et a2 à zéro, commeexpliqué plus bas. C'est un choix de commodité qui sera conservé tout au long de ce travail.
1 L'extremum est unique et est nécessairement un minimum car la courbe est paraboloïque et on ne peut pasavoir d'énergie in�niment négative.

40 Modélisation
2.2.5 Écriture de la forme de la solution complète
Ayant déterminé la solution particulière, on peut maintenant écrire la déformée sous la formed'une fonction de deux coe�cients at,1 et at,2 (ou at,1 et at,3 pour une double barre), en notantyi les fonctions de �ambement associées, soit :
y = at,1 y1 + at,2 y2 + yp. (2.15)
Pour les coe�cients at,1 et at,2, le coe�cient t indique que ce sont des amplitudes topologiques.Du fait de l'Eq. 2.15, les valeurs des coe�cients a1 et a2 n'ont pas d'impact par la suite et il estplus simple de les mettre à zéro. Ainsi, les amplitudes de déformation du mode 1 et du mode 2sont respectivement at,1 et at,2 et non at,1 +a1 et at,2 +a2. Dans les graphiques suivants (commeles graphes de la Fig. 2.8), on utilisera des coe�cients a1 et a2 nuls.
On note qu'ainsi on obtient une déformée estimée sur 20 modes, puisqu'on a :
y = at,1 y1 + at,2 y2 +20∑i=3
ai yi (2.16)
2.2.6 Écriture de l'énergie du système associée à la déformée
On écrit à présent les équations d'équilibre. On devra ensuite les résoudre puis extraire lesdonnées pertinentes de notre problème. Cette démarche est analogue aux étapes de la résolutionpar éléments-�nis (et valable pour toute méthode de Galerkin), que l'on décompose en prétrai-tement, traitement, puis post-traitement. Cette étape est un prétraitement.
Écriture des énergies :Il existe quatre types d'énergie :
� l'énergie due aux forces extérieures.� l'énergie due aux moments extérieurs.� l'énergie due à la compression.� l'énergie due à la �exion.
On notera qu'en petits déplacements ces quatre énergies sont liées respectivement à y, y', y' et y�.
L'énergie d'actionnement Uact est donnée en section 2.2.3.L'énergie due à la compression s'écrit selon la loi de Hooke.
On dé�nit :
la longueur s = l +
12
∫ l0 y′(x)2 dx
la longueur à vide de la barre l0
l'extension ε =s− l0
l0
Alors :
Uc =12A E ε2 (2.17)
L'énergie due à la �exion s'écrit :
Uf =E I
2
∫ l
0y′′(x)2 dx (2.18)
N.B. : On obtient aussi la force de compression, désignée dans ce travail comme la forcenormale, comme :
FN = A E ε (2.19)

2.2 Résolution du système 41
Écriture des énergies totales :On peut alors écrire l'énergie totale du mécanisme :
Utot = Uact + Uc + Uf (2.20)
Pour l'analyse, on peut tracer les di�érentes énergies en fonction des amplitudes at,1 et at,2.On donne l'exemple en Fig. 2.8 des courbes d'énergies pour un actionnement central de 10N.
(a) Représentation 3D de l'énergiede compression. Le domaine bis-table est dans la vallée.
(b) Représentation 3D de l'éner-gie de compression, détaillée.
(c) Représentation 3D de l'énergiede �exion.
(d) Représentation 3D de l'éner-gie due au travail de la force.
(e) Représentation 3D de l'énergietotale.
(f) Représentation 3D de l'énergietotale, détaillée.
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa ; appui à 50% de l.
Fig. 2.8 � Représentations 3D des di�érentes énergies, pour un actionnement central de 10N.
L'énergie due au travail de la force est un plan. Ici, elle est même indépendante du coe�cientat,2. En e�et, dans le cas d'un actionnement central, on aura d = 2 a1 +k où k est une constante,liée aux modes 1 modulo 4. Ainsi, le déplacement d ne dépend pas de l'amplitude du secondmode de �ambement et par conséquent le travail de la force non plus.
L'énergie de �exion est une surface paraboloïque avec un minimum d'énergie en (at,1 =0, at,2 =0). Elle n'entraîne pas de bistabilité.
La bistabilité vient bien de l'énergie de compression, c'est à dire du phénomène de �ambement.Elle se présente comme une sorte de cruche avec le fond bombé. On retrouve du coup cette formepour l'énergie totale, qui est la somme des 3 précédentes. C'est cette forme qui fait apparaîtreplusieurs extrema et qui apporte les comportements singuliers du mécanisme bistable.
On obtient un extremum au point central (at,1 = 0, at,2 = 0) qui est un maximum local àcause du bombé de l'énergie de compression. Cette solution correspond par ailleurs à la solution

42 Modélisation
particulière yp, qui est calculée en cherchant un extremum d'énergie sans l'énergie de compression.On obtient également 4 autres minima locaux (cf. Fig. 2.9). Parmi ceux-ci, deux maximisentl'amplitude de at,1, c'est à dire sont les solutions de la branche stable. Deux autres favorisent lesamplitudes du coe�cient at,2 et sont les positions de transition.
On voit que l'on obtient plusieurs extrema intéressants. C'est pour cette raison que l'on utiliseun solveur exact, qui déterminera toutes les solutions d'équilibre (à une précision donnée) et nonpas un algorithme qui donnerait un seul minimum, local ou global. De plus, cela permet d'obtenirdes solutions instables et d'éventuelles solutions d'équilibre indé�ni qui ne seraient pas obtenuespar une autre méthode de résolution.
Le basculement en mode 1 peut ici aussi être assimilé à un basculement qui passerait par labosse de la cruche, non par la vallée. C'est une démonstration graphique du fait que le mode 2aide le système à basculer et abaisse l'énergie de basculement. Aussi le chemin de la poutre lorsdu basculement est un dosage subtil entre les coe�cients at,1 et at,2. Lors de ce basculement, ilfaut réactualiser ce graphe 3D qui est valable pour une force de 10N uniquement.
Comme les extrema d'énergie sont assez di�ciles à apercevoir dans un graphique 3D, notam-ment en fond de vallée où la courbe se tasse, on présente des coupes en Fig. 2.9 qui permettentde voir di�érentes con�gurations pour une force de 10N.
(a) coupe pour at,1 =0,0045 (b) coupe pour at,2 =0 (c) coupe pour at,2 =0, vue détaillée
(d) coupe pour at,2 =0,003027 (e) coupe pour at,1 =0,001227 (f) coupe pour at,1 =0
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa ; appui à 50% de l.
Fig. 2.9 � Di�érentes coupes de l'énergie totale pour une force de 10N. Les coupes sont faitessur les extrema locaux.

2.2 Résolution du système 43
Bombé(solution instable)
Vallée
Fig. 2.10 � Représentation 3D de l'énergie totale. Les extrema sont en croix.
2.2.7 Détermination des solutions d'équilibre
On cherche maintenant à déterminer numériquement ces positions d'équilibre.Selon le principe de l'énergie, l'équation d'équilibre va pouvoir s'écrire par minimisation sous laforme : (
∂Utot
∂ai= 0
)i=1,2
(2.21)
On obtient ici toutes les solutions d'équilibre, y compris des solutions stables, instables etindé�nies. Il est assez aisé de sélectionner ensuite graphiquement les portions stables des courbesd'équilibre. Au contraire, le faire mathématiquement (via une condition sur la seconde dérivée)est di�cile car la stabilité est dé�nie par des paramètres qui ne sont pas les coe�cients at,i. Deplus, on prend le risque de rejeter des solutions qui sont intéressantes pour la compréhension dufonctionnement. Aussi, par la suite, on n'utilise qu'une condition d'équilibre et non de stabilité.

44 Modélisation
2.2.8 Résolution des équations d'équilibre
Cette étape est un traitement. De ce fait, c'est essentiellement une procédure automatiséerépétitive. On doit résoudre les équations précédentes pour toutes les valeurs souhaitées.La procédure est la suivante :
� On �xe une valeur pour F (ou pour le niveau d'actionnement dans un cas autre que laforce). Ceci détermine aussi les (ai) et yp.
� On introduit cette valeur dans le système d'équilibre issu de l'Eq. 2.21.� On résout le système précédent, ce qui nous donne une liste de jeu {at,i} possibles. Pourchaque jeu trouvé, on véri�e que la solution est réelle. Si elle est réelle, on ajoute le jeuavec F dans une liste totale.
� On recommence pour toutes les valeurs de F .Au �nal, on obtient une liste de jeux {(at,i), (ai)} d'équilibre avec les forces F associées.
N.B. : Les méthodes de la littérature utilisent une procédure di�érente pour cette résolution.Elles procèdent à un calcul de la loi entrée(s)/sortie(s) en mode 1 seul, puis en mode combiné1&2 (ou 1&3), cf. Fig. 2.16. La méthode présentée ici donne directement la courbe stable sansnécessité de couper les branches instables, en contrepartie de l'obligation de faire un calculnumérique.
2.2.9 Extraction des sorties du mécanisme et formulation des lois E/S
Cette étape est un post-traitement. De ce fait, c'est essentiellement un tri et une reformulationdes résultats pour extraire les valeurs pertinentes.
Une fois que l'on a obtenu tous les points, on doit établir la loi E/S du mécanisme. Toutd'abord, on doit dé�nir les entrées et sorties. On prend généralement pour entrée le déplacementau point central, soit y(l/2) (où y est dé�ni par l'Eq. 2.16) et pour sortie la force F (ou le niveaud'actionnement). Connaissant la forme de la poutre via les jeux (at,i) et (ai), on peut déterminerle déplacement du point central.
2.2.10 Résolution pratique, la présentation en deux passes
On peut dans un soucis d'e�cacité présenter cette méthode de résolution via une résolutionen deux passes.
La première passe consiste à résoudre les équations d'équilibre (c'est à dire à obtenir lasolution particulière) via l'extremum d'énergie qui est forcément un minimum. On utilise une
fonction génératrice y=20∑i=1
ai yi et une fonction énergie U =Uact+Uf (soit Uc =0). On détermine
alors y en fonction de l'actionnement (y est linéaire par rapport à l'actionnement, donc onnormalise F ) via les coe�cients (ai). On met les deux premiers coe�cients à zéro. On obtientalors yp qui vaut alors y/F ou simplement y si F = 1.
La seconde passe consiste à calculer les extrema d'énergie pour le système réel pour uneexcitation donnée. On utilise une fonction énergie U =Uact+Uf +Uc et une fonction génératricey=at,1 y1+at,2 y2+F yp. On détermine alors les di�érents couples de coe�cients (at,i) pour tousles niveaux d'actionnement souhaités.
Il reste en�n à associer les déplacements, déterminés par y(a) (où a est la position de contrôle,le plus souvent l/2) aux couples de force ou de niveau d'actionnement. On peut alors tracer lescourbes discrètes force-déplacement (ou actionnement-déplacement).
Dans cette présentation en deux passes, on change la dé�nition de la fonction énergie et lafonction génératrice entre les deux passes, mais pas l'algorithme de calcul. On note que la seconde

2.3 Exemples 45
passe est beaucoup plus longue à traiter à cause des coe�cients croisés, malgré la présence deseulement deux modes et de deux inconnues.
2.3 Exemples avec di�érents types de basculement
On présente dans cette partie les résultats synthétiques de la modélisation de divers systèmesbasés sur des poutres �ambées classiques. On traite les cas de la poutre �ambée actionnée aucentre, actionnée sur le coté (qui est une nouveauté de ce travail de thèse), de la barre rotulée-rotulée, et en�n du mécanisme double barre actionnée au centre.
2.3.1 Actionnement central, basculement en mode 1
On considère le cas d'une montage tel celui présenté en Fig. 2.11. On soumet une poutredroite à une compression, entrainant son �ambement. Le principe de basculement est donné enFig. 2.12.
F
l0
l
Fig. 2.11 � Paramétrage d'une poutreencastrée-encastrée, la force est appliquée aumilieu de la poutre.
F1
2
3
Fig. 2.12 � Principe du basculement en mode1 d'une poutre bistable.
Dans le cas d'une précompression faible, on obtient une courbe qui ressemble fortement àune sinusoïde, comme la courbe Fig. 2.13, tracée ici avec b = 0,03m, h = 0,002m, et l = 0,1m,une précompression de 0,02% et E = 187,5GPa. En e�et, la courbe d'énergie est un polynômede degré 4 fonction du déplacement, et assez proche des �gures obtenues par méthode pseudo-rigides. Les méthodes pseudo-rigides se calant généralement sur les résultats expérimentaux paridenti�cation, on aura une concordance des résultats dans ces cas là.
On note que pour le cas d'une précompression qui tend vers 0, l'énergie de compression aupassage de la poutre par y = 0 est liée à l'énergie de compression de Hooke. Comme le modèlepseudo-rigide a deux paramètres (l'écartement et la rigidité des ressorts), si l'écartement est telque la précompression soit quasi-nulle, la rigidité tend vers le module de Young et le modèlepseudo-rigide tend vers le modèle réel.
En Fig. 2.12, en 1, on a la position d'équilibre. En 2, on applique une force qui comprime lapoutre jusqu'au basculement violent (phénomène de snap-through), qui permet en 3 d'atteindrela seconde position d'équilibre.
On voit via la courbe de force normale en Fig. 2.14 qu'on n'atteint pas la force de compressionen mode 2, celui-ci n'intervient pas et les déformées restent symétriques. Le coe�cient a2 dû àla solution générale sera ainsi toujours nul. De plus, l'amplitude de déformation mode 2 due à lasolution particulière est également nulle. Au �nal, il n'y a pas de déformation mode 2.
On trace à présent les con�gurations pour une force normale de 10N sur la barre en Fig. 2.15.Les con�gurations sont repérées dans la Fig. 2.13.
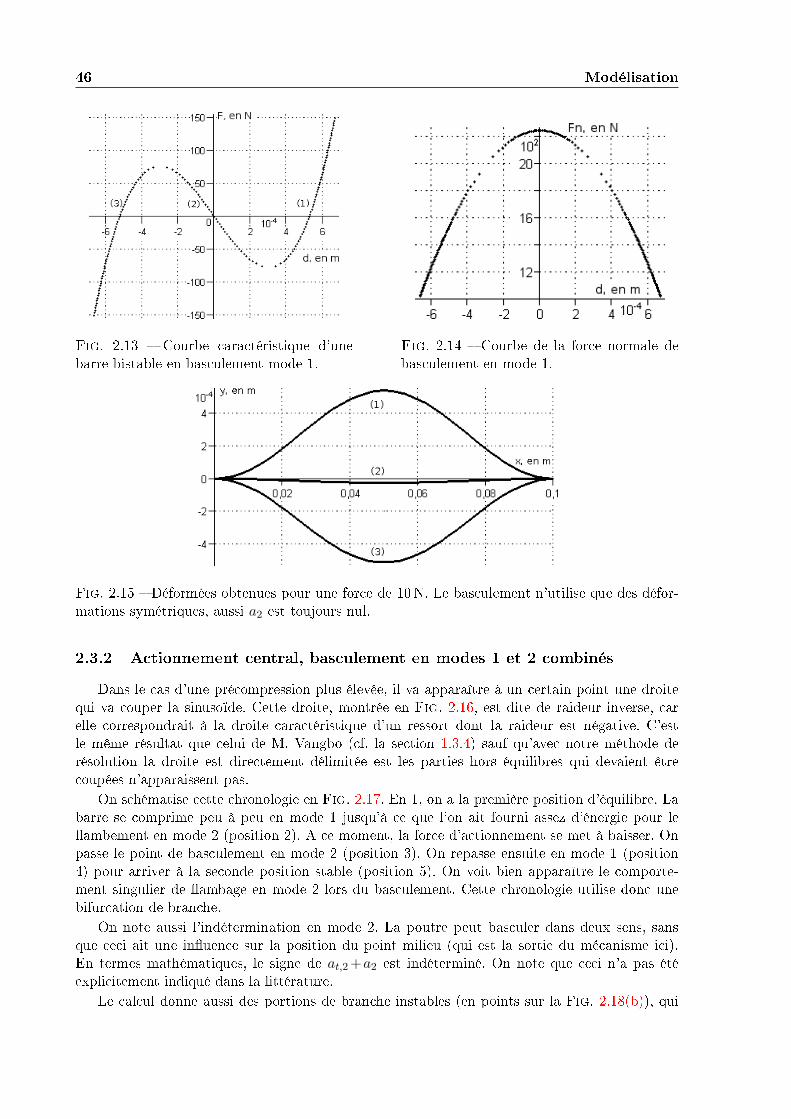
46 Modélisation
Fig. 2.13 � Courbe caractéristique d'unebarre bistable en basculement mode 1.
Fig. 2.14 � Courbe de la force normale debasculement en mode 1.
Fig. 2.15 � Déformées obtenues pour une force de 10N. Le basculement n'utilise que des défor-mations symétriques, aussi a2 est toujours nul.
2.3.2 Actionnement central, basculement en modes 1 et 2 combinés
Dans le cas d'une précompression plus élevée, il va apparaître à un certain point une droitequi va couper la sinusoïde. Cette droite, montrée en Fig. 2.16, est dite de raideur inverse, carelle correspondrait à la droite caractéristique d'un ressort dont la raideur est négative. C'estle même résultat que celui de M. Vangbo (cf. la section 1.3.4) sauf qu'avec notre méthode derésolution la droite est directement délimitée est les parties hors équilibres qui devaient êtrecoupées n'apparaissent pas.
On schématise cette chronologie en Fig. 2.17. En 1, on a la première position d'équilibre. Labarre se comprime peu à peu en mode 1 jusqu'à ce que l'on ait fourni assez d'énergie pour le�ambement en mode 2 (position 2). A ce moment, la force d'actionnement se met à baisser. Onpasse le point de basculement en mode 2 (position 3). On repasse ensuite en mode 1 (position4) pour arriver à la seconde position stable (position 5). On voit bien apparaître le comporte-ment singulier de �ambage en mode 2 lors du basculement. Cette chronologie utilise donc unebifurcation de branche.
On note aussi l'indétermination en mode 2. La poutre peut basculer dans deux sens, sansque ceci ait une in�uence sur la position du point milieu (qui est la sortie du mécanisme ici).En termes mathématiques, le signe de at,2 +a2 est indéterminé. On note que ceci n'a pas étéexplicitement indiqué dans la littérature.
Le calcul donne aussi des portions de branche instables (en points sur la Fig. 2.18(b)), qui

2.3 Exemples 47
Fig. 2.16 � Découpe des branches pour unactionnement central. On ne garde que laportion rouge.
F
F
F
1
2
4
3
5
Fig. 2.17 � Principe du basculement enmode 2 d'une poutre bistable.
(a) courbe f-d complète (b) courbe f-d délimitée
Fig. 2.18 � Courbe caractéristique force-déplacement d'une barre bistable actionnée au centreen basculement mode 2. A partir de la courbe complète, on peut sélectionner graphiquement lesbranches stables (en croix) et instables (en points), puis ainsi délimiter la portion utile.
correspondent au basculement en mode 1 seul, celui utilisé dans le cas précédent. Il est ici instablecar le basculement en mode 2, plus facile, lui est préféré.
Si la force de compression est fortement plus grande que la force de �ambement en mode 2,la caractéristique tend vers une forme de N, ce qui assure une meilleure rigidité apparente autourdes points stables. Le seuil de basculement en force est atteint à coté des positions stables. C'est

48 Modélisation
Fig. 2.19 � Force normale de basculementmodes 1 et 2 combinés.
Fig. 2.20 � Con�gurations pour une force de10N.
une des topologies typiques des mécanismes bistables, qui donne la forme en N à la courbe force-déplacement, qui est celle d'un actionnement en mode 1 pur (et un basculement en modes 1 &2).
Cette topologie se caractérise par la présence d'une première branche de forme sinusoïdaleou ovaloïde comme ici (en Fig. 2.18(a)), qui utilise exclusivement le mode 1. Elle est ensuitecoupée par une double (elle est quadruple pour une double barre) branche de raideur négative quiinterdit le passage par la branche de mode 1 (qui devient beaucoup plus énergétique). Lorsqu'onsélectionne la portions utile, on fait disparaitre une grande partie de la branche correspondantau mode 2, y compris la portion oblique centrale qui va réapparaître systématiquement dans lescourbes force-déplacement et qui n'est jamais utilisée.
La courbe force-normale - déplacement est donnée en Fig. 2.19. Elle se présente comme uncloche coupée par une droite horizontale, au niveau de la force critique de �ambement en mode2. En e�et, les équations de �ambement indiquent que dès qu'on a atteint la force critiquede �ambement mode 2, ce dernier est activé, indépendamment de son amplitude. Aussi, oncommence par une force normale de compression mode 1, cette force augmente peu à peu sousl'e�et de la compression de la poutre, puis la branche se retrouve coupée par la droite horizontalede mode 2 dès que le système atteint celle-ci. Si la force normale �nit par croiser l'axe horizontale,c'est dans le cas où on tire sur celle-ci, après la position stable. Ceci explique pourquoi la �guremontre des branches qui descendent jusqu'à l'axe horizontal.
On trace également les con�gurations pour une force normale de 10N en Fig. 2.20. Lespositions de ces con�gurations sont données en Fig. 2.18(b). On voit alors bien que la branchede pente négative cache deux con�gurations distinctes, comme on le voyait d'ailleurs en position3 de la Fig. 2.17.
2.3.3 Actionnement décalé
On va à présent décaler la force d'actionnement. On fait un montage sur le principe du schémade la Fig. 2.21. On utilise les dimensions habituelles, soit b = 0,02m, h = 0,004m, et l = 0,1m,une précompression de 2% et E =187,5GPa.
Pour un actionnement décalé, le comportement n'est pas le même que pour l'actionnementcentral. De ce fait, la technique de découpe des branches ne fonctionne pas. Heureusement, laméthode de résolution présentée ici permet d'obtenir les courbes directement, sans découpe.On doit simplement délimiter les domaines utiles. On a tracé en Fig. 2.23 les caractéristiquesforce-déplacement complètes et délimitées pour plusieurs positions d'actionnement.
Comme on le voit en Fig. 2.22 et en Fig. 2.23, le système utilise tout d'abord la branche qui
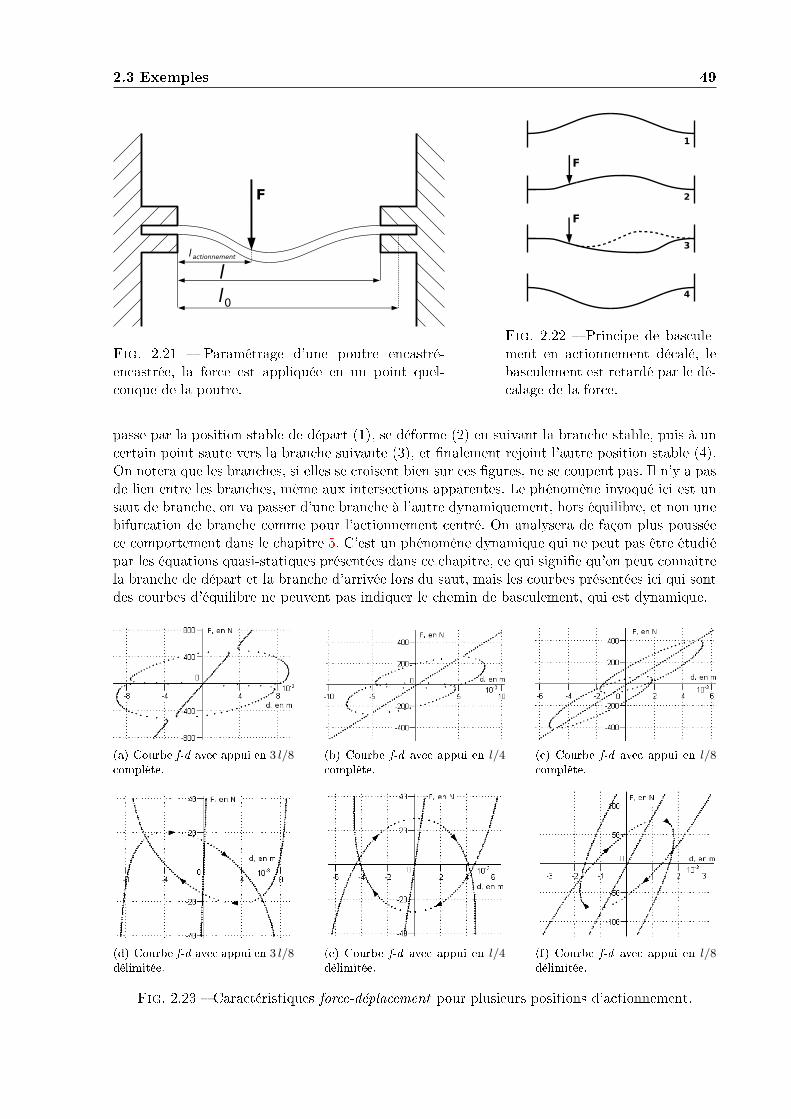
2.3 Exemples 49
ll0
F
lactionnement
Fig. 2.21 � Paramétrage d'une poutre encastré-encastrée, la force est appliquée en un point quel-conque de la poutre.
F
F
1
4
3
2
Fig. 2.22 � Principe de bascule-ment en actionnement décalé, lebasculement est retardé par le dé-calage de la force.
passe par la position stable de départ (1), se déforme (2) en suivant la branche stable, puis à uncertain point saute vers la branche suivante (3), et �nalement rejoint l'autre position stable (4).On notera que les branches, si elles se croisent bien sur ces �gures, ne se coupent pas. Il n'y a pasde lien entre les branches, même aux intersections apparentes. Le phénomène invoqué ici est unsaut de branche, on va passer d'une branche à l'autre dynamiquement, hors équilibre, et non unebifurcation de branche comme pour l'actionnement centré. On analysera de façon plus pousséece comportement dans le chapitre 5. C'est un phénomène dynamique qui ne peut pas être étudiépar les équations quasi-statiques présentées dans ce chapitre, ce qui signi�e qu'on peut connaitrela branche de départ et la branche d'arrivée lors du saut, mais les courbes présentées ici qui sontdes courbes d'équilibre ne peuvent pas indiquer le chemin de basculement, qui est dynamique.
(a) Courbe f-d avec appui en 3 l/8complète.
(b) Courbe f-d avec appui en l/4complète.
(c) Courbe f-d avec appui en l/8complète.
(d) Courbe f-d avec appui en 3 l/8délimitée.
(e) Courbe f-d avec appui en l/4délimitée.
(f) Courbe f-d avec appui en l/8délimitée.
Fig. 2.23 � Caractéristiques force-déplacement pour plusieurs positions d'actionnement.

50 Modélisation
On note que l'actionnement en 3 l/8 (cf. Fig. 2.23(d)) est pour certains points meilleur quel'actionnement central. La force de basculement est réduite à 21N (contre 37N en central cf.Fig. 2.18(b)) et la course est réduite de quelques pourcents.
Par ailleurs, la caractéristique force-déplacement a tendance à se coucher au fur et à mesureque l'on se rapproche du bord. La performance en l/8 est très dégradée, avec une force seuil trèsimportante (cf. Fig. 2.23(f)). De plus, le débattement se réduit de plus en plus.
Un phénomène particulier est celui du basculement. Pour un actionnement en l/2, la barreva se dérober lors du basculement sur la moitié de la course, ce de façon symétrique. Pour unactionnement en l/4, elle se dérobera aussi, mais sur une course très réduite. Pour un actionne-ment en l/8, elle ne se dérobe pas malgré le basculement. En e�et, le basculement se fait dansune con�guration où la barre est encore réceptrice, et plus avancée que le point de repos. Ceciest très surprenant sur banc d'essai.
2.3.4 Actionnement central d'une barre rotulée-rotulée
Dans le cas d'une barre rotulée-rotulée, les conditions aux extrémités changent et les équationsde �ambement sont di�érentes. Le schéma de la Fig. 2.24 présente le paramétrage.
F
ll0
Fig. 2.24 � Paramétrage d'une poutre rotulée-rotulée, la force est appliquée au milieu de lapoutre.
Les équations deviennent :
{y0 = a0 sin
(π x
l
), y1 = a1 sin
(2 π x
l
), UF = −F y(l/2)
}(2.22)
On trace la caractéristique en Fig. 2.26 pour des valeurs b=0,02m, h=0,0004m, l=0,1m,et E = 187,5GPa pour une précompression de 2%. Ce sont les mêmes que celles utilisées pourles exemples précédents.
On constate que le comportement est similaire à celui de la barre encastrée-encastrée (cf.Fig. 2.18(b)) avec une courbe en N. On a le même e�et de seuil de basculement, avec l'apparitionbrusque de la déformation en mode 2. Les di�érences sont à chercher du coté de ce seuil, qui està 21N au lieu de 37N pour une barre bi-encastrée, et du coté de la déformation subie par labarre, qui baisse.
Pour résumer, pour un système de même encombrement, on obtient le même comportement,un seuil de basculement plus faible et une déformation en baisse qui induit moins de risque deplasti�cation et/ou de casse.
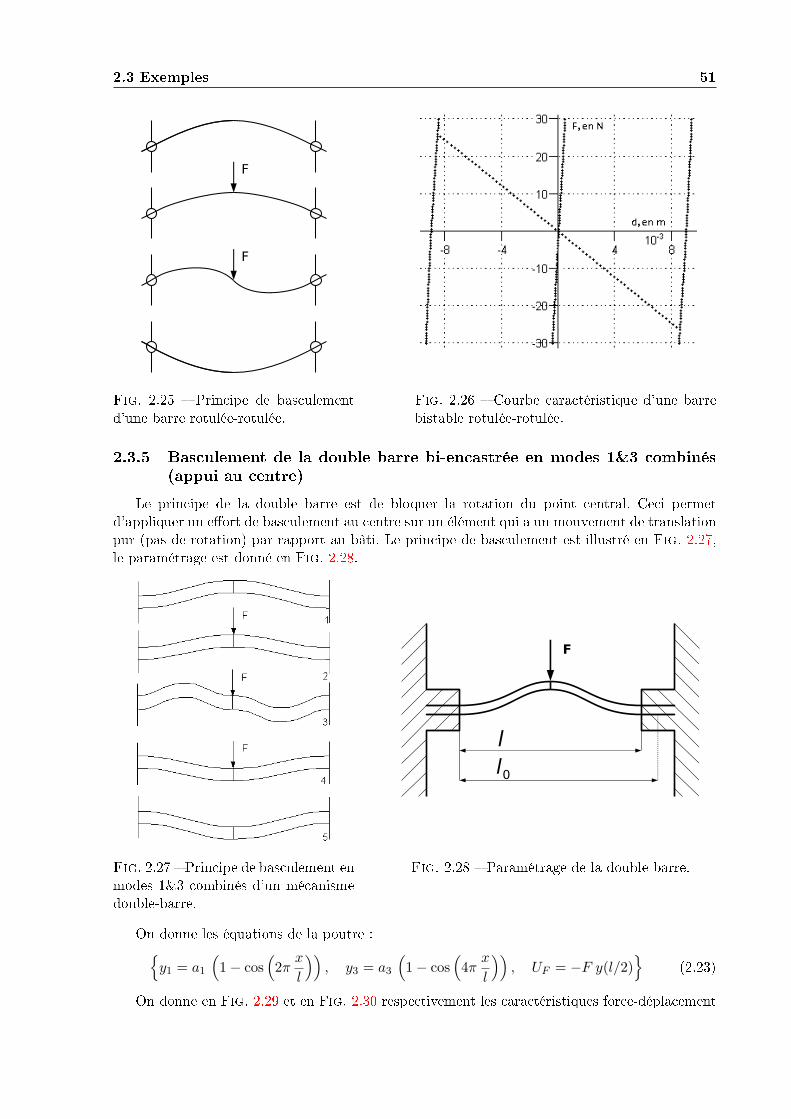
2.3 Exemples 51
F
F
Fig. 2.25 � Principe de basculementd'une barre rotulée-rotulée.
Fig. 2.26 � Courbe caractéristique d'une barrebistable rotulée-rotulée.
2.3.5 Basculement de la double barre bi-encastrée en modes 1&3 combinés(appui au centre)
Le principe de la double barre est de bloquer la rotation du point central. Ceci permetd'appliquer un e�ort de basculement au centre sur un élément qui a un mouvement de translationpur (pas de rotation) par rapport au bâti. Le principe de basculement est illustré en Fig. 2.27,le paramétrage est donné en Fig. 2.28.
Fig. 2.27 � Principe de basculement enmodes 1&3 combinés d'un mécanismedouble-barre.
F
l0
l
Fig. 2.28 � Paramétrage de la double barre.
On donne les équations de la poutre :{y1 = a1
(1− cos
(2π
x
l
)), y3 = a3
(1− cos
(4π
x
l
)), UF = −F y(l/2)
}(2.23)
On donne en Fig. 2.29 et en Fig. 2.30 respectivement les caractéristiques force-déplacement

52 Modélisation
et force normale - déplacement du mécanisme lors du basculement.
Fig. 2.29 � Caractéristique force-déplacementd'une barre d'un mécanisme double barre.
Fig. 2.30 � Force normale de basculement d'unmécanisme double-barre.
En�n, on trace en Fig. 2.31 les con�gurations pour une force de 10N. Les solutions sontrepérées sur la Fig. 2.29.
Fig. 2.31 � Con�gurations de la double barre, ici pour une force de 10N.
Il apparaît qu'il manque des con�gurations possibles. En e�et, comme montré en Fig. 2.32,quatre déformations de basculement existent et seules 2 sont représentables avec les équationschoisies. Ceci vient du manque de mode antisymétriques et n'a pas d'in�uence sur les résultats.On a une indétermination du sens de �ambement transitoire, qui nécessiterait une découpe enportion des fonctions de déformation pour être prise en compte. Cependant, on obtiendrait unesuperposition de branches de transition comme avec un monobarre, avec 4 branches superposéesau lieu de 2. Le calcul est lourd et n'est pas présenté ici.
(a) première con�gura-tion
(b) deuxième con�gura-tion
(c) troisième con�gura-tion
(d) quatrième con�gura-tion
Fig. 2.32 � Di�érentes con�gurations obtenues en double-barre. Le modèle avec les modes 1 et3 ne permet que deux con�gurations, la première et la quatrième.
Lors du �ambement, le calcul théorique donne un double �ambement de la poutre (1 dechaque coté du point central). Au vu de la sensibilité de phénomènes de �ambement, on peutenvisager d'autres solutions, comme représenté en Fig. 2.33.

2.3 Exemples 53
F
(a) Flambement dissymétrique avec un seul coté�ambé.
F
(b) Flambement dissymétrique réparti. La doublebarre ne remplit pas son rôle et le centre tourne.
Fig. 2.33 � Flambement dissymétrique d'un mécanisme double barre.
Ces phénomènes sont transitoires. A ce titre, ils ne devraient pas véritablement in�uer sur lecomportement perçu. Il serait intéressant de savoir s'ils existent via l'usage d'une caméra rapide.Nous avons d'ailleurs fait quelques tests sur un mécanisme similaire, qui ont montré que plus lesystème est souple, plus des phénomènes parasites apparaissent et sont importants. Ils rendenttoute modélisation caduque. On notera aussi qu'il y a eu récemment des études sur des e�ets detorsion 3D des mécanismes bistables [15].
On va maintenant comparer ces résultats à la simple barre. Le résultat est représenté enFig. 2.34.
(a) force-déplacement. (b) force normale-déplacement.
Fig. 2.34 � Caractéristiques force-déplacement (a) et force-normale-déplacement (b) des doubleset simple barres superposées.
En conclusion, la double barre a, par rapport à la simple barre, les avantages suivants :
� Une force de basculement de deux à trois fois celle de la simple barre, ce pour chaque barre(soit quatre à six fois pour une double barre comparée à la simple barre). On note qu'iln'y a pas d'évolution au delà de deux barres.
� Le point central se translate sans rotation. Les mécanismes 4 barres sont d'ailleurs utilisésen guidage �exible, mais sans compression qui induit un comportement de �ambement.
Ces avantages ont fait le succès des mécanismes bistables multi-barres.

54 Modélisation
2.4 Approche topologique
Les exemples précédents montrent que plusieurs courbes sont similaires. Les actionnementscentraux, soit des actionnements symétriques par rapport à la droite (x = l/2), ont tous unecaratéristique en forme de N (basculement en mode 2) ou en sinusoïde (basculement en mode1). Au contraire, l'actionnement en force décalée présente une courbe en forme de demi-lune.
Une solution pour obtenir des catégories d'actionnements et pour prévoir la forme de lacaractéristique est de s'intéresser à la répartition de l'énergie d'actionnement dans les modes.
2.4.1 Calcul de la répartition de l'énergie dans les modes
La répartition de l'énergie est dépendante exclusivement de la solution particulière, puisqu'onparle de répartition d'énergie d'actionnement, pas de répartition d'énergie dans les modes, quele système fait de lui-même (via le déchargement dans les modes de �ambement). On va donccalculer cette répartition sur les modes de la solution particulière, typiquement juste avant derésoudre les équations du système complet avec minimum d'énergie.
Pour calculer la répartition d'énergie dans les modes de l'actionnement, on utilise l'énergie de�exion induite par l'actionnement et les coe�cients (ai) obtenus via l'Eq. 2.14. Ainsi, l'énergiede �exion induite par l'actionnement vaut
Umode =∞∑i=1
E I
2
∫ l
0(ai y
′′i (x))2 dx (2.24)
et chaque mode y contribue comme
Umode,i =E I
2
∫ l
0(ai y
′′i (x))2 dx (2.25)
avec i le mode considéré.Par commodité, on peut estimer l'énergie via les 20 premiers modes de �ambement comme
Umode 'n=20∑i=1
E I
2
∫ l
0(ai y
′′i (x))2 dx. (2.26)
Il est alors possible de calculer la contribution relative de chaque mode comme
Urel,i =Umode,i
Umode. (2.27)
2.4.2 Topologie actionnement mode 1
Pour ce type d'actionnement, toute l'énergie d'actionnement est transmise dans le mode 1(puis répartie dans le mode 2 si on dépasse la force critique de �ambement mode 2). On est alorsdans le cas de la découpe de branche, déjà présentée dans la littérature, et on obtient des courbesen N avec bifurcation (pour l'apparition de la branche du mode 2). On ne transmet de l'énergieque dans le mode qui dé�nit la bistabilité et la position. Ce type d'actionnement correspondnotamment à l'actionnement central en force, dé�ni et développé précédemment.
On obtient notamment ce cas pour des actionnements antisymétriques. Seuls les modes sy-métriques sont alors excités, en évitant le mode 2, antisymétrique.

2.4 Approche topologique 55
2.4.3 Topologie actionnement mode 2
On obtient ce type d'actionnement lorsque le premier mode n'est pas actionné. C'est no-tamment le cas pour un actionnement antisymétrique, soit en symétrie centrale par rapport aupoint (x = l/2, y = 0). Par exemple, c'est ce que l'on obtient avec un actionnement central enmoment tel que représenté en Fig. 2.35. Avec les dimensions habituelles, on obtient une courbemoment-déplacement représentée en Fig. 2.36.
Fig. 2.35 � Schéma pour un actionnement en couple central.
La courbe obtenue est assez particulière puisqu'elle exhibe une forme en ellipse, dotée d'unebranche verticale sur le petit axe (verticale d = 0). Cependant, ce sont en fait deux verticalessuperposées et pour partie instables. C'est pourquoi on a cette fois-ci montré le graphique avecdes axes encadrants et non comme habituellement en croix cartésienne.
Partant d'une position stable, sous un actionnement croissant, le système va suivre un desquatre quarts d'ellipse, ce jusqu'au point de déplacement nul. A ce moment, le système estcomplètement déformé en mode 2. L'actionnement le contraignant à se déformer encore en mode2, il va augmenter encore sa déformation mode 2 en utilisant une des branches verticales dedéformation mode 2, sans modi�er le déplacement d (d'où la verticalité de la branche).
deplacement en mK0,0075 K0,0050 K0,0025 0,0000 0,0025 0,0050 0,0075
Mom
ent
en N
m
K1,5
K1,0
K0,5
0,0
0,5
1,0
1,5
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m;E =187,5 109 Pa.
Fig. 2.36 � Courbe M-d pour un actionnement par moment centré.
Quand on relâche le couple d'actionnement, le système revient tout d'abord au point debifurcation, croisement entre l'ellipse et la ligne verticale. A ce point, il peut continuer à utiliser le

56 Modélisation
mode 2 de déformation, mais cette branche devient instable. Alors, il va soit emprunter le quartd'ellipse précédent soit prendre l'autre portion adjacente. L'utilisation de l'une ou de l'autrebranche ne peut pas être déterminé par une étude élastique. Cependant, le système présenteraa priori un minimum d'hystérésis qui lui fera préférer la branche initiale, ce qui le fait revenir àsa position initiale. Ainsi, l'actionnement ne permet pas au système de basculer. On notera quel'actionnement opposé donne exactement le même comportement, symétriquement, car le grapheest complètement symétrique par rapport au couple M .
deplacement en mK0,005 0 0,005
Forc
e n
orm
ale
en N
0
10
20
30
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.37 � Courbe force normale - déplacement pour un actionnement moment.
En observant la caractéristique force normale - déplacement (en Fig. 2.37), on voit qu'ilapparaît un palier de force normale au niveau de la force critique de �ambement en mode 1.Par contre, lorsque le mode 1 est désactivé, le déplacement est nul et on a une verticale quicorrespond à la superposition de la con�guration droite (instable) sur toute la hauteur et desbranches correspondant aux con�gurations en mode 2 pur.
Ce type d'actionnement, qui revient à n'actionner que le mode 2, celui qui aide le système àbasculer, ne pilote pas l'orientation du bistable et ainsi ne lui permet pas de basculer. Cependant,il est intéressant de citer ce cas, qui apparaît parfois pour des positions particulières lorsqu'onexplore di�érentes con�gurations d'actionnement.
2.4.4 Topologie actionnement modes 1 et 2
On s'intéresse à présent aux actionnements qui excitent les modes 1 et 2 simultanément. C'estd'ailleurs le cas le plus courant.
Un premier exemple est l'actionnement en force décalée, soit tout actionnement par une forceunique sauf l'actionnement central. On note d'ailleurs qu'on ne peut pas obtenir d'actionnementmode 2 dans le cas de la force unique ni d'actionnement modes supérieurs. L'actionnement mode2 ne peut être obtenu qu'avec au moins deux forces.
Un autre exemple est un actionnement par moment non-central. Pour ce cas, le déplacementutilisé est la translation selon l'axe y du point central de la poutre.
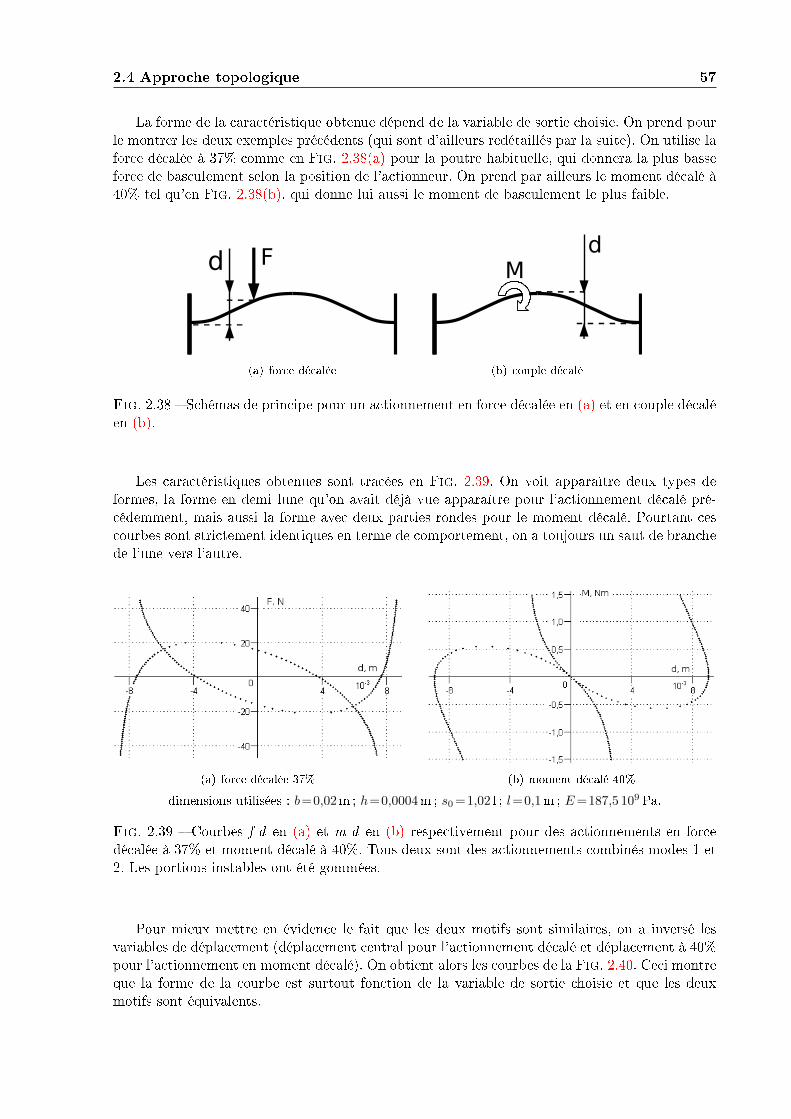
2.4 Approche topologique 57
La forme de la caractéristique obtenue dépend de la variable de sortie choisie. On prend pourle montrer les deux exemples précédents (qui sont d'ailleurs redétaillés par la suite). On utilise laforce décalée à 37% comme en Fig. 2.38(a) pour la poutre habituelle, qui donnera la plus basseforce de basculement selon la position de l'actionneur. On prend par ailleurs le moment décalé à40% tel qu'en Fig. 2.38(b), qui donne lui aussi le moment de basculement le plus faible.
Fd
(a) force décalée
Md
(b) couple décalé
Fig. 2.38 � Schémas de principe pour un actionnement en force décalée en (a) et en couple décaléen (b).
Les caractéristiques obtenues sont tracées en Fig. 2.39. On voit apparaître deux types deformes, la forme en demi lune qu'on avait déjà vue apparaître pour l'actionnement décalé pré-cédemment, mais aussi la forme avec deux parties rondes pour le moment décalé. Pourtant cescourbes sont strictement identiques en terme de comportement, on a toujours un saut de branchede l'une vers l'autre.
(a) force décalée 37% (b) moment décalé 40%
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.39 � Courbes f-d en (a) et m-d en (b) respectivement pour des actionnements en forcedécalée à 37% et moment décalé à 40%. Tous deux sont des actionnements combinés modes 1 et2. Les portions instables ont été gommées.
Pour mieux mettre en évidence le fait que les deux motifs sont similaires, on a inversé lesvariables de déplacement (déplacement central pour l'actionnement décalé et déplacement à 40%pour l'actionnement en moment décalé). On obtient alors les courbes de la Fig. 2.40. Ceci montreque la forme de la courbe est surtout fonction de la variable de sortie choisie et que les deuxmotifs sont équivalents.

58 Modélisation
(a) force décalée 37%, déplacement 50% (b) moment décalé 40%, déplacement 40%
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.40 � Courbes f-d en (a) et m-d en (b) respectivement pour des actionnement en forcedécalée à 37% et moment décalé à 40% avec les variables de sortie inversées.
2.4.5 Topologie actionnement modes supérieurs
Cette dernière topologie d'actionnement apparaît lorsque l'atctionneur n'excite aucun desdeux modes topologiques. Aussi seul les modes non-topologiques, qui sont les modes supérieurs,sont exploités. Certains actionnements spéci�ques tombent dans ce cadre, souvent pour desactionnements qui utilisent fortement les symétries. Dans ce cas, on obtient uniquement desdéformations selon les modes supérieurs. Aussi, le modèle présenté ne permet pas de conclureraisonnablement, puisqu'il est intrinsèquement basé sur la topologie qui n'est pas exploitée ici.Cependant, de tels actionnements ne permettent pas à la structure de basculer puisque le mode1 n'est pas actionné (tout comme pour l'actionnement mode 2). De plus, les modes supérieursdemandent encore plus d'énergie pour se déformer et un actionnement mode 1 ou modes 1 et 2devrait être choisi à la place.
2.4.6 Discussion
En se basant sur les modes topologiques, on a pu dé�nir quatre catégories, fruits des com-binaisons possibles de l'état actionné ou non-actionné des modes topologiques, ici les modes de�ambement 1 et 2. On montre dans cette partie mais aussi plus généralement tout au long de cetravail que si les actionnements peuvent être très di�érents par leurs principes, ceux qui serontclassés dans une même catégorie vont partager une grande partie de leurs caractéristiques, ce quijusti�e l'utilisation de telles catégories.
Parce que le premier mode topologique apporte la bistabilité (il autorise l'existence des deuxpositions stables), tout actionnement pour pouvoir faire basculer le mécanisme et non simplementle déformer se devra de l'exciter au moins un peu. Ceci implique que les actionnements mode 2et modes supérieurs doivent ne pas être retenus.
Quand on compare les résultats obtenus avec un actionnement mode 1 et un actionnementmodes 1 et 2, il apparaît que ce dernier apporte une amélioration notable par rapport au premiers'il est bien choisi. Dans le cas d'un actionnement en force, une réduction de 35% de la force debasculement peut être obtenue. Cependant, pour de nombreuses autres positions, c'est en faitune aggravation des performances que l'on obtient.
Un autre point est que la baisse de la force d'actionnement, bien que considérable, ne changerapas complètement le comportement de la structure. Le niveau d'excitation associé à l'actionne-ment � optimisé � est du même ordre de grandeur que l'actionnement mode 1 � de référence �.
2.5 Aspects d'optimisation 59
Ceci peut aussi être expliqué par une approche énergétique. L'actionnement sert à apporter del'énergie à la structure, de sorte que celui-ci passe d'un mode de �ambement 1 (état stable) aumode 2 (instable et point de basculement).
Quand on apporte de l'énergie via le seul mode 1, le système va tout d'abord se déformer ensuivant ce mode, mais à un moment donné la compression induite va forcer le système à utiliserle deuxième mode de �ambement pour réduire l'énergie interne due à sa déformation, par unphénomène très proche à celui du �ambement. L'actionnement modes 1 et 2 apporte directementde l'énergie dans le deuxième mode, autorisant une large modi�cation de la courbe de réponse,qui autorise parfois une réduction de l'excitation de basculement. Mais le phénomène utilisé estle même (apporter de l'énergie pour aller du mode 1 de �ambement au mode 2 avant de basculer)et les niveaux d'excitation obtenus sont du même ordre de grandeur. Une bonne approche pourtrouver la position optimale d'actionnement est de commencer par trouver un actionnementmode 1, qui peut être trouvé par des méthodes géométriques (comme des symétries). Ensuite,on peut chercher un actionnement modes 1 et 2 meilleur en modi�ant légèrement la position duou des actionneurs. En e�et, dans tous nos développements, nous avons trouvé des optimumsassez proches des actionnements mode 1. On fera remarquer cependant que parce que dans lemonde réel on ne peut pas avoir des courbes avec des bifurcations de branche aussi nettes etdes angles si marqués, l'excitation de basculement réelle est moindre de plusieurs pourcents dela valeur théorique. Et par suite, l'optimisation obtenue en passant d'un actionnement mode 1 àun actionnement modes 1 et 2 est plus faible que prédit.
En�n, on notera que si l'actionnement peut utiliser les deux modes topologiques, il n'estpas possible de l'optimiser pour chaque déformation, tant que l'on reste dans l'optique d'unsystème simple. Aussi la seule optimisation possible est la répartition de l'énergie selon les deuxmodes topologiques, �xée par la position de l'actionneur. Ceci peut s'avérer être un véritableproblème pour un actionnement interne, car la structure se déformera en suivant les deux modeset l'actionneur doit alors être capable de supporter les deux déformations mode 1 et mode 2 etcontinuer à actionner le système.
2.5 Aspects d'optimisation
2.5.1 Rigidité apparente et seuil de basculement
Ce sont deux paramètres fondamentaux que l'on doit aussi considérer pour toute optimisation.
Rigidité apparente
On désigne par rigidité apparente la rigidité locale aux points stables. Elle est donnée par latangente de la courbe force déplacement, comme représenté en Fig. 2.41.
Pour une poutre �ambée droite, par e�et de symétrie, la rigidité apparente est la même auxdeux points. Ce n'est pas le cas pour une barre pré-�ambée.
Seuils de basculement
On désigne par seuil de basculement le point où la dérivée de la force par rapport au dépla-cement change de signe, comme représenté en Fig. 2.42.
De la Fig. 2.41, on peut conclure que les montages à basculement en mode 1 ou avec unactionnement décalé peuvent être considérés comme � mous � (seuil décalé, rigidité apparentemoyenne), alors que les montages à basculement en modes combinés sont plutôt � durs � avecune caractéristique en forme de N.

60 Modélisation
(a) mode 1 (b) modes 1&2
Fig. 2.41 � Rigidité apparente dans le cas d'un actionnement central avec basculement en mode1 (a) et en mode 2 (b).
(a) mode 1 (b) modes 1&2
Fig. 2.42 � Seuil de basculement dans le cas d'un basculement mode 1 (a) et mode 2 (b).
On peut ainsi donner un critère pour la rigidité du mécanisme. Si on souhaite qu'il soit� dur �, c'est à dire qu'il bascule en modes 1&2 combinés et actionnement central, il faudra quel'énergie de compression de la barre droite soit supérieure à l'énergie de �ambement en mode 2(rapport ηP ≥ 1, cf. ci-après), ce qui nous assure que le basculement se fait en modes combinés.C'est ce que l'on utilise lorsque se sert de la topologie a priori.
2.5.2 Rapport ηP
Le rapport ηP va servir à déterminer à quel point les singularités de �ambement mode 2vont intervenir, plus précisément de l'importance relative des déformations mode 2 par rapport
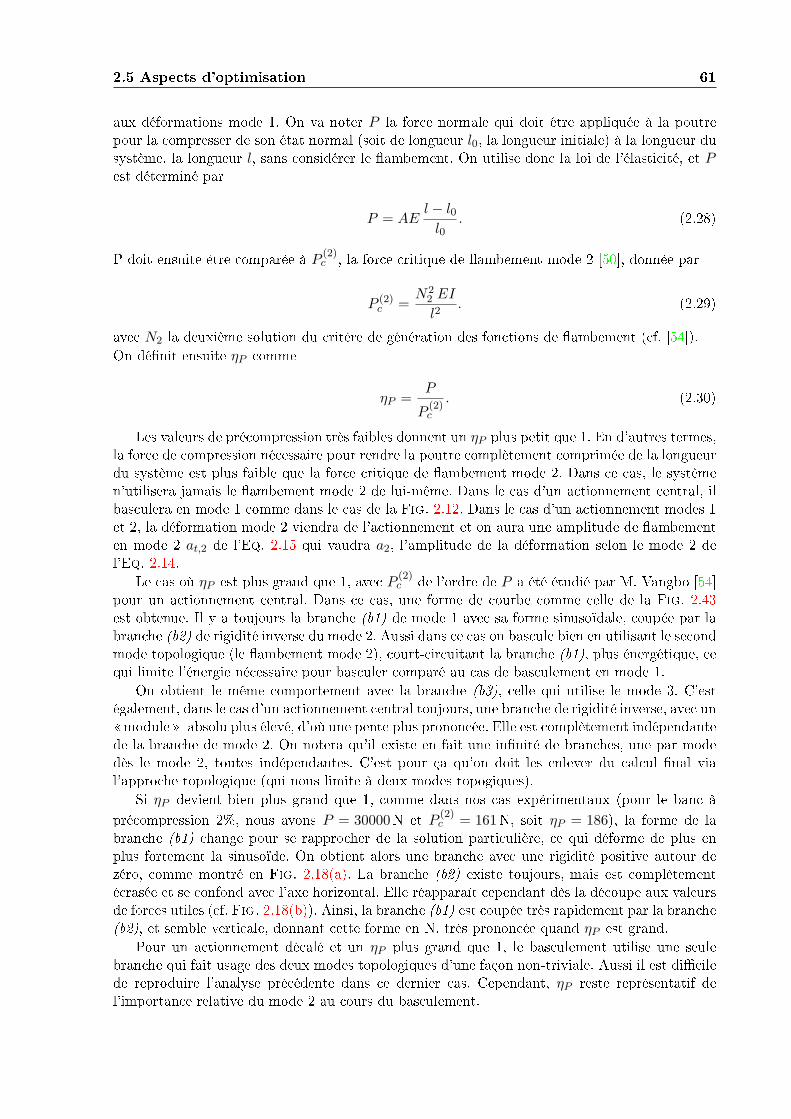
2.5 Aspects d'optimisation 61
aux déformations mode 1. On va noter P la force normale qui doit être appliquée à la poutrepour la compresser de son état normal (soit de longueur l0, la longueur initiale) à la longueur dusystème, la longueur l, sans considérer le �ambement. On utilise donc la loi de l'élasticité, et Pest déterminé par
P = AEl − l0
l0. (2.28)
P doit ensuite être comparée à P(2)c , la force critique de �ambement mode 2 [50], donnée par
P (2)c =
N22 EI
l2. (2.29)
avec N2 la deuxième solution du critère de génération des fonctions de �ambement (cf. [54]).On dé�nit ensuite ηP comme
ηP =P
P(2)c
. (2.30)
Les valeurs de précompression très faibles donnent un ηP plus petit que 1. En d'autres termes,la force de compression nécessaire pour rendre la poutre complètement comprimée de la longueurdu système est plus faible que la force critique de �ambement mode 2. Dans ce cas, le systèmen'utilisera jamais le �ambement mode 2 de lui-même. Dans le cas d'un actionnement central, ilbasculera en mode 1 comme dans le cas de la Fig. 2.12. Dans le cas d'un actionnement modes 1et 2, la déformation mode 2 viendra de l'actionnement et on aura une amplitude de �ambementen mode 2 at,2 de l'Eq. 2.15 qui vaudra a2, l'amplitude de la déformation selon le mode 2 del'Eq. 2.14.
Le cas où ηP est plus grand que 1, avec P(2)c de l'ordre de P a été étudié par M. Vangbo [54]
pour un actionnement central. Dans ce cas, une forme de courbe comme celle de la Fig. 2.43est obtenue. Il y a toujours la branche (b1) de mode 1 avec sa forme sinusoïdale, coupée par labranche (b2) de rigidité inverse du mode 2. Aussi dans ce cas on bascule bien en utilisant le secondmode topologique (le �ambement mode 2), court-circuitant la branche (b1), plus énergétique, cequi limite l'énergie nécessaire pour basculer comparé au cas de basculement en mode 1.
On obtient le même comportement avec la branche (b3), celle qui utilise le mode 3. C'estégalement, dans le cas d'un actionnement central toujours, une branche de rigidité inverse, avec un�module � absolu plus élevé, d'où une pente plus prononcée. Elle est complètement indépendantede la branche de mode 2. On notera qu'il existe en fait une in�nité de branches, une par modedès le mode 2, toutes indépendantes. C'est pour ça qu'on doit les enlever du calcul �nal vial'approche topologique (qui nous limite à deux modes topogiques).
Si ηP devient bien plus grand que 1, comme dans nos cas expérimentaux (pour le banc à
précompression 2%, nous avons P = 30000N et P(2)c = 161N, soit ηP = 186), la forme de la
branche (b1) change pour se rapprocher de la solution particulière, ce qui déforme de plus enplus fortement la sinusoïde. On obtient alors une branche avec une rigidité positive autour dezéro, comme montré en Fig. 2.18(a). La branche (b2) existe toujours, mais est complètementécrasée et se confond avec l'axe horizontal. Elle réapparaît cependant dès la découpe aux valeursde forces utiles (cf. Fig. 2.18(b)). Ainsi, la branche (b1) est coupée très rapidement par la branche(b2), et semble verticale, donnant cette forme en N, très prononcée quand ηP est grand.
Pour un actionnement décalé et un ηP plus grand que 1, le basculement utilise une seulebranche qui fait usage des deux modes topologiques d'une façon non-triviale. Aussi il est di�cilede reproduire l'analyse précédente dans ce dernier cas. Cependant, ηP reste représentatif del'importance relative du mode 2 au cours du basculement.

62 Modélisation
η +(b3)
(b2)
(b1)F
d
P
Fig. 2.43 � Courbe f-d pour un actionnement central, en fonction du paramètre ηP . L'augmen-tation de ηP donne l'impression d'applatir les courbes de mode 2 et supérieurs par rapport à lasinusoïde de mode 1.
On notera qu'augmenter P et ηP augmente aussi les non-linéarités du système, et à un certainpoint le modèle modal en petits déplacements n'est plus e�cace. Il faut alors se tourner vers lesmodèles pseudo-rigides [31], qui prendront en compte les grands déplacements.
2.5.3 Pourcentage d'énergie utilisée
L'énergie est transmise dans le mécanisme via la solution particulière. Du fait du �ambement,les modes 1&2 sont utilisés pour le basculement (cf. Fig. 2.44). L'énergie qui est utilisée pourdéformer la poutre selon les modes supérieurs n'intervient pas dans la mécanique du basculementet ne sert qu'à déformer la structure. Elle est donc perdue.
On va s'intéresser à l'impact de di�érents paramètres sur cette fraction d'énergie transmise.On va donc calculer la fraction d'énergie transmise dans les deux premiers modes, qui est lasomme des contributions des deux premiers modes données par l'Eq. 2.27, soit
Urel =Umode,1 + Umode,2
Umode. (2.31)
On trace d'abord la fraction d'énergie selon la position d'actionnement (Fig. 2.45(a)), pour lapoutre habituelle. On trace ensuite la fraction d'énergie selon l'épaisseur (Fig. 2.45(b)) pour lamême poutre avec un actionnement à 35% de la longueur.
On voit apparaître ici des zones plus intéressantes que d'autres pour l'actionnement. Parexemple, un actionnement entre 0,3 l et 0,7 l pour le montage de la Fig. 2.45(a) transmettraplus de 92% de l'énergie. Il semble par contre que cette fraction ne dépende pas de l'épaisseur.On note qu'elle ne dépend pas non plus de la précompression (qui n'in�ue pas sur la solutionparticulière), ni de la profondeur.
Ceci permet d'avoir une condition pour éliminer des montages qui transmettraient trop d'éner-gie dans les modes supérieurs. Cependant si le fait de transmettre une bonne partie de l'énergiedans les modes topologiques est une condition nécessaire pour avoir un mécanisme e�cace, cen'est pas une condition su�sante. L'actionnement décalé en force est parfois plus intéressant quel'actionnement central, qui pourtant transmet pratiquement toute son énergie dans le premier(et donc les deux premiers) modes. La bonne répartition de l'énergie dans les deux modes estaussi importante, on se référera à la section 2.4.
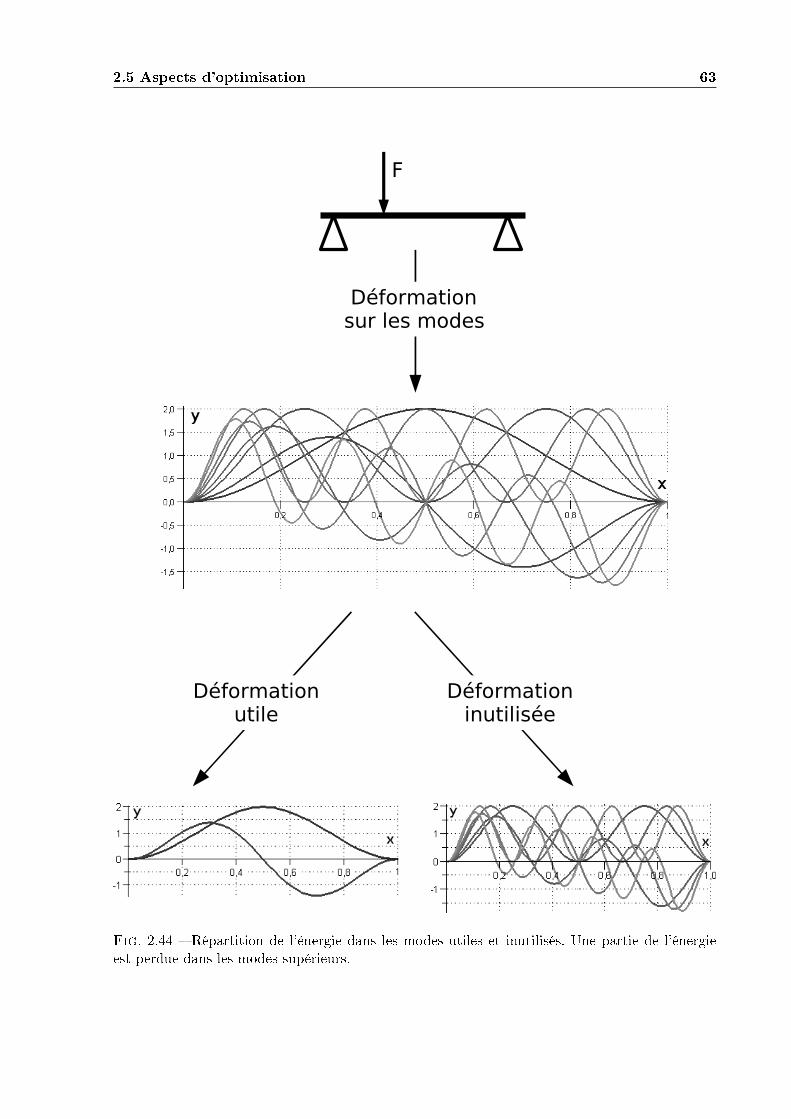
2.5 Aspects d'optimisation 63
F
Déformation sur les modes
Déformationutile
Déformationinutilisée
Fig. 2.44 � Répartition de l'énergie dans les modes utiles et inutilisés. Une partie de l'énergieest perdue dans les modes supérieurs.

64 Modélisation
(a) position (b) épaisseur
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.45 � Fraction d'énergie transmise selon la position et l'épaisseur. En (a), on fait varierla position de la force d'actionnement de 0 à l (en abscisses) et on trace la fraction d'énergietransmise correspondante. En (b), on fait de même avec l'épaisseur, pour un actionnement central(courbe 1) et à 35% de l (courbe 2).
2.5.4 Utilisation a priori de la topologie
On veut ici comparer le comportement d'un système dans le cas d'un actionnement en forcecentrale (mode 1) et d'un actionnement décalé bien choisi (modes 1 et 2). On ne regarde pas lescas de l'actionnement mode 2 et modes supérieurs qui ne sont pas des actionnements e�caces.
Le point de basculement, c'est-à-dire le point où la force appliquée devient négative, a un rôlede première importance sur le comportement du système. Ce point indique la �n du domainestable. Après celui-ci, le système ne peut plus revenir de lui-même dans sa première position. Deplus, il délimite le domaine où l'actionneur est actif. Pour un actionnement en force centrale, suiteà la forme en N de la courbe force-déplacement, le domaine stable théorique est d'exactement lamoitié de la courbe. Pour un actionnement en force décalée, l'hystérésis augmente la longueur dudomaine stable, et on peut injecter de l'énergie sur une course plus longue avec un pic de forcemoindre.
Aussi, comme l'énergie totale à apporter au système est relativement constante pour uneforce pas trop décalée (de 50% à 65% de la longueur, l'énergie à apporter augmente de moins de15%, comme on peut le voir en Fig. 2.45(a)), la force maximum va décroître. On a vu dans lesexemples de force centrale et décalé à 37,5% précédents que la force de basculement baisse à 21Npour l'actionnement décalé contre 37N en central. De plus, suite à l'e�et de levier, la course del'actionneur décroît légèrement même si la course active augmente. Un autre avantage est l'aug-mentation du domaine stable, qui apporte une plus grande robustesse envers une perturbationen displacement.
Un autre moyen pour illustrer ces di�érences est l'utilisation d'une méthode énergétique.Comme mentionné au-dessus, l'énergie de basculement e�ective, soit l'énergie qu'on apporte à lapoutre pour la faire basculer, est relativement constante puisque liée à l'énergie pour faire �amberla poutre en mode 2, multiplié par un rapport d'e�cacité qui est l'inverse du rapport donné enFig. 2.45(a). Par contre, l'actionneur, classiquement, n'est pas dimensionné pour cette énergie.

2.5 Aspects d'optimisation 65
On le dimensionne pour être capable de fournir un peu plus que la force maximale nécessaire surtoute la course de basculement.
On peut alors dé�nir une énergie de dimensionnement, qui sera le produit de la course et dela force maximum à apporter (la force de basculement). On peut ensuite dé�nir le ratio entrel'énergie e�ectivement nécessaire et l'énergie de dimensionnement de l'actionneur. On l'a repré-senté en Fig. 2.46 dans le cas de l'actionnement en force centrale et décalé. On voit que ce ratioest d'environ 25% seulement dans le cas d'un actionnement central, suite à la forme triangulairede la courbe force-déplacement, mais monte à 50-60% pour un actionnement décalé, grâce à laforme en demi-lune. Ceci montre que l'actionneur est mieux utilisé pour un actionnement décalé,et on pourra choisir un actionneur plus compact pour actionner la même poutre.
On obtient par contre un résultat opposé quand l'actionnement est trop excentré. Une trèsgrande portion de l'énergie est alors transmise dans les modes supérieurs (cf. chapitre 3) et nesert qu'à déformer des modes non-topologiques et est donc principalement perdue. Ceci conduità augmenter la force de basculement.
(a) actionnement central (b) actionnement décalé (3l/8)
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.46 � Comparaison entre l'énergie utilisée et l'énergie de dimensionnement, dans le casd'un actionnement central (a) et décalé (b).
Si un actionnement décalé semble alors très intéressant, d'autres problèmes apparaissent. Unactionnement décalé réduit la rigidité apparente et la rigidité apparente locale, des paramètresclefs pour évaluer la performance d'un mécanisme bistable. On doit aussi rappeler que le pointd'actionnement va tourner lors de l'actionnement, ce qui peut causer des soucis lors de la concep-tion de mécanismes monolithiques par exemple. Au contraire, l'actionnement central par doublebarre va éliminer cette rotation. Un autre souci est que durant le basculement, un mécanismeactionné par force décalée utilise un saut de branche, ce qui crée des chocs dans la structure. Aucontraire, l'actionnement central induit une déformation continue et beaucoup plus progressive.
Finalement, on se retrouve avec deux cas très di�érents. L'actionnement central est très bonen terme de stabilité, avec une rigidité apparente excellente, une course maximum et une forcede basculement élevée. D'un autre coté, l'actionnement décalé autorise une meilleure utilisationde l'actionneur.
Utiliser a priori la topologie, c'est considérer que ces di�érences de comportement sont liéesà la catégorie (actionnement mode 1, modes 1 et 2) tel qu'on l'a dé�ni en section 2.4 et peuventêtre prédites par le seul type d'actionnement. Aussi, si on veut un bon comportement bistable,on va chercher à utiliser un actionnement mode 1. Au contraire, pour optimiser l'actionnement,on va choisir un actionnement modes 1 et 2, qui utilisera mieux l'actionneur.

66 Modélisation
2.5.5 Scission des entrées-sorties
Les performances attendues en entrée sont di�érentes des performances attendues en sortie.On privilégiera en sortie des performances liées à l'usage du mécanisme, alors qu'en entrée, soitl'actionnement, on sera contraint de dimensionner conjointement l'actionneur et le comportementdu bistable. La scission permet de pro�ter au mieux des performances optimales de chaque partieau lieu d'être réduit au plus petit dénominateur commun. On utilise l'exemple de l'actionnementpar force.
Comme on peut jouer sur le caractère � dur-mou � du bistable en décalant les forces d'ac-tionnement, on peut en pro�ter pour adapter au mieux le comportement du bistable par rapportà sa sortie et sa commande (son actionneur). En sortie, on favorisera un comportement � dur �,synonyme de performance pour le bistable. Par contre en entrée, un comportement plus lisse,avec un seuil de basculement moins élevé, est préférable.
Dans la perspective d'un actionnement optimal, on cherchera pour une énergie de basculementéquivalente, à privilégier une force la plus faible possible, soit à répartir l'énergie transmise surtoute la course, comme expliqué au-dessus. Le motif en N est de ce point de vue assez mauvais,alors que le motif en demi-lune de l'actionnement en force décalée est plus intéressant. L'idéeserait alors d'avoir une entrée décalée et une sortie en plein milieu du bistable.
FentréeFsortie
(a) Principe (b) Caractéristique
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.47 � Principe et caractéristique du banc de test avec scission des E/S. L'entrée en forcedécalée (38% de l) est la courbe (e), et la sortie en force central la courbe (s). Les portionsinstables ont été gommées.
On représente en Fig. 2.47(a) le principe d'un tel montage. On utilise notre poutre de ré-férence avec un actionnement central en sortie et un actionnement décalé à 38% en entrée. Lescourbes f-d correspondantes sont superposées en Fig. 2.47(b).
Un simple déplacement de 12% de la longueur de la force permet de baisser de près de 40% laforce de basculement (de 37N on passe à 21N), de réduire la course d'actionnement de 14% (de18mm on passe à 15,5 mm) tout en conservant les performances de sortie. C'est un moyen trèse�cace et peu coûteux pour utiliser des actionneurs moins volumineux à performances égales.Nous avons présenté ce résultat au Congrès Français de Mécanique 2007 [10].

2.6 Modi�cation de la fonction génératrice 67
2.5.6 Comparaison comportement non-bistable
On trace en Fig. 2.48 les courbes de comportement conjointement de la solution particulièreet de la solution globale pour la poutre de référence à basculement en mode 1&2. Ceci permet devoir que la solution particulière se comporte en déformation dans les mêmes ordres de grandeurque le mécanisme bistable.
L'intérêt est aussi de noter qu'on obtient avec cette méthode une solution particulière ef-fective (celle du système après utilisation des équations de compression) qui prend en comptela compression. Dans le cas contraire, on aurait superposition de l'asymptote en l'in�ni de lacaractéristique et de la solution particulière brute (cf. Fig. 2.48(b)).
(a) courbe f-d délimitée (b) courbe f-d étendue
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 2.48 � Courbes force-déplacement de la solution particulière (cercles et tirets) et du méca-nisme bistable (croix), délimitée (en(a)) et étendue (en(b)). Les courbes ne se superposent pasen +∞, signe que la compression est prise en compte dans la solution globale.
2.6 Modi�cation de la fonction génératrice
Dans cette partie, on regarde comment se comporte le calcul si on modi�e légèrement laforme de la fonction génératrice. Le but est de véri�er qu'on a bien choisi cette dernière, avec lenombre nécessaire et su�sant de degrés de liberté, ce qui implique qu'on a la fonction la plussimple. Ceci permet d'avoir le calcul le plus rapide tout en obtenant les courbes caractéristiquescomplètes.
On va s'intéresser à l'impact d'un degré de liberté supplémentaire (soit un mode de plus dansla solution générale) sur le résultat. On s'intéresse ensuite à l'impact de la fonction particulière.Les formules présentées précédemment sont obtenues comme le fruit d'une démonstration ma-thématique. Ici on s'intéresse à l'impact numérique de solutions proches, choisies sans aucunejusti�cation ni mathématique ni mécanique, mais dans le seul but d'explorer l'espace proche desfonctions génératrices.

68 Modélisation
2.6.1 Branches fantômes du mode 3
On va ajouter un mode de �ambage supplémentaire en utilisation un degré de liberté sup-plémentaire dans les équations. On utilise ici une poutre avec une profondeur de 30mm, 0,4mmd'épaisseur, un module de Young de 220Gpa pour un mécanisme de 100mm de long et uneprécompression de 2%. On utilise ici un actionnement décalé à 37,5% de la longueur. La fonctiongénératrice y avec trois modes pris en compte devient alors
y = ygen + yp où
ygen =3∑
i=1ai yi, avec yi fonction générale (de �ambement)
yp = yp, avec yp fonction particulière (d'équilibre)(2.32)
où y3 est dé�nie par l'Eq. 2.23.
Fig. 2.49 � Caractéristique f-d classiqueavec deux modes topologiques en mode ac-tionnement décalé 37,5%.
Fig. 2.50 � Caractéristique f-d avec lesbranches fantômes du mode 3. On voit ap-paraitre des branches instables qui résultentdu déchargement en mode 3.
On donne tout d'abord les courbes force-déplacement avec deux modes de �ambement commeprécédemment, puis trois, respectivement en Fig. 2.49 et Fig. 2.50. On voit que si on coupe lesparties utiles, on obtiendrait les mêmes courbes. Au passage, on est passé d'un temps de calculde moins d'une minute à plusieurs heures.
On s'intéresse aussi aux forces normales, données en Fig. 2.51 et en Fig. 2.52. En e�et, laforce normale permet de bien voir que les nouvelles branches sont la conséquence de l'utilisationdu mode 3. On peut aussi superposer les courbes prédédentes, ce qu'on a fait en Fig. 2.53 eten Fig. 2.54. On se rend compte que la branche instable n'in�ue pas sur la branche stable, cequi résulte du seuil d'énergie nécessaire pour utiliser cette branche. On a le même phénomènelorsque le basculement se fait en mode 1 et que les équations du mode 2 sont intégrée au calcul,mais n'in�uent pas.
On fait ici une autre modi�cation de la fonction génératrice. On ajoute un degré de liberté surla solution particulière, c'est à dire qu'on écrit :
y = ygen + yp où
ygen =2∑
i=1ai yi, avec yi fonction générale (de �ambement)
yp = b yp, avec yp fonction particulière (d'équilibre)(2.33)

2.6 Modi�cation de la fonction génératrice 69
Fig. 2.51 � Caractéristique fn-d avec deuxmodes topologiques.
Fig. 2.52 � Caractéristique fn-d avec lesbranches fantômes du mode 3. On voit ap-paraître des branches instables qui résultentdu déchargement en mode 3.
Fig. 2.53 � Caractéristiques f-d superpo-sées deux et trois modes topologiques.
Fig. 2.54 � Caractéristiques fn-d superpo-sées deux et trois modes topologiques.
On obtient alors la caractéristique donnée en Fig. 2.55.On voit que la solution est très proche de la solution trouvée avec utilisation du mode 3.
Les di�érences sont dues à la dépendance avec les modes supérieurs. On note que cette méthoden'assure pas l'équilibre. Lorsque b 6= 1, le système n'est pas à l'équilibre.
Au �nal, on peut superposer les trois caractéristiques force-déplacement trouvées, ce qu'on afait en Fig. 2.56. Ici, les branches stables devraient être parfaitement superposées. C'est globale-

70 Modélisation
Fig. 2.55 � Caractéristique f-d avec degréde liberté sur la solution particulière.
Fig. 2.56 � Les 3 caractéristiques f-d super-posées.
ment le cas sur les domaines stables, mais ça ne l'est pas en revanche sur les zones instables. Cecimontre que la solution particulière n'a que peu d'impact sur la zone utile dans le cas présent,et que l'on n'a pas besoin de trois modes topologiques ou d'un degré de liberté sur la solutionparticulière (surtout que celui-ci peut mettre le système hors-équilibre).
Le véritable problème est le temps de calcul. Il est bien plus faible avec les degrés de libertésur les seuls deux premiers modes topologiques. Avoir le nombre de modes topologiques nécessaireet su�sant permet d'augmenter le nombre de modes pris en compte pour un coût de calcul faible,rendant la modélisation plus �ne. Au contraire, les autres solutions donnent le même résultatpour la zone stable à un coût de calcul prohibitif.
2.6.2 In�uence de la solution d'équilibre
Le fait d'inclure la solution particulière augmente la di�culté de résolution. En e�et, onpasse d'un système solvable à la main à un système numérique avec une résolution de typeprétraitement - traitement - post-traitement. Heureusement, l'outil informatique masque partielle-ment cette di�culté.
On peut se demander quelle est l'in�uence réelle de cette solution d'équilibre sur le résultat.On a vu précédemment que son impact n'est pas forcément déterminant, car l'ajout d'un degréde liberté sur celle-ci a�ecte peu le résultat. On utilise donc une fonction génératrice simpli�ée,c'est-à-dire
y = ygen + yp où
ygen =3∑
i=1ai yi, avec yi fonction générale (de �ambement)
yp = yp, avec yp fonction particulière (d'équilibre)(2.34)
On trace ci-après les courbes force-déplacement obtenues pour un actionnement en force endi�érents points, obtenues avec la solution particulière et sans celle ci. Les �gures Fig. 2.57,Fig. 2.58, et Fig. 2.59 donnent les courbes pour des actionnements respectivement à 50%, 35%et 15% de la longueur.
On voit que les forces de basculement sont globalement inchangées, alors qu'elles sont cer-tainement la caractéristique principale de ces montages. On doit faire la di�érence entre lesactionnements central et à 35% d'une part, et celui à 15% d'autre part.
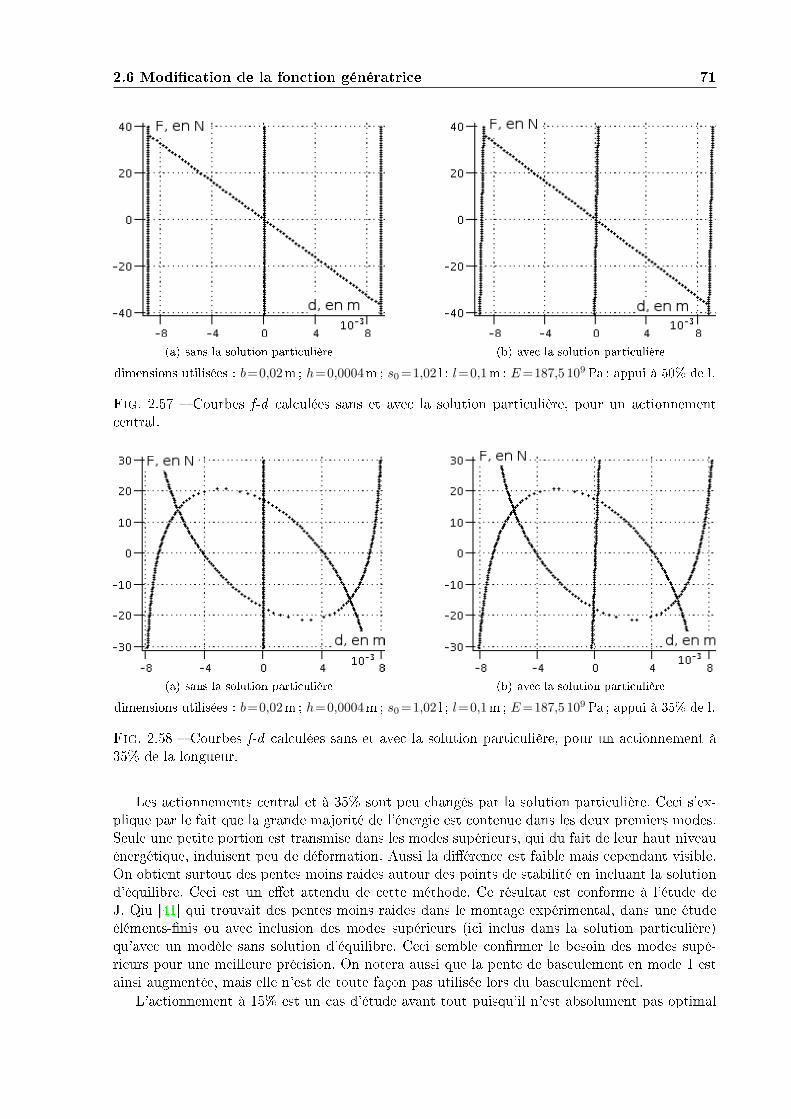
2.6 Modi�cation de la fonction génératrice 71
(a) sans la solution particulière (b) avec la solution particulière
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa ; appui à 50% de l.
Fig. 2.57 � Courbes f-d calculées sans et avec la solution particulière, pour un actionnementcentral.
(a) sans la solution particulière (b) avec la solution particulière
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa ; appui à 35% de l.
Fig. 2.58 � Courbes f-d calculées sans et avec la solution particulière, pour un actionnement à35% de la longueur.
Les actionnements central et à 35% sont peu changés par la solution particulière. Ceci s'ex-plique par le fait que la grande majorité de l'énergie est contenue dans les deux premiers modes.Seule une petite portion est transmise dans les modes supérieurs, qui du fait de leur haut niveauénergétique, induisent peu de déformation. Aussi la di�érence est faible mais cependant visible.On obtient surtout des pentes moins raides autour des points de stabilité en incluant la solutiond'équilibre. Ceci est un e�et attendu de cette méthode. Ce résultat est conforme à l'étude deJ. Qiu [41] qui trouvait des pentes moins raides dans le montage expérimental, dans une étudeéléments-�nis ou avec inclusion des modes supérieurs (ici inclus dans la solution particulière)qu'avec un modèle sans solution d'équilibre. Ceci semble con�rmer le besoin des modes supé-rieurs pour une meilleure précision. On notera aussi que la pente de basculement en mode 1 estainsi augmentée, mais elle n'est de toute façon pas utilisée lors du basculement réel.
L'actionnement à 15% est un cas d'étude avant tout puisqu'il n'est absolument pas optimal

72 Modélisation
(a) sans la solution particulière (b) avec la solution particulière
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa ; appui à 15% de l.
Fig. 2.59 � Courbes f-d calculées sans et avec la solution particulière, pour un actionnement à15% de la longueur.
en terme de comportement. Une grande partie de l'énergie est cette fois-ci envoyée dans lesmodes supérieurs (voir la Fig. 2.45(a)) et la solution particulière permet donc d'intégrer l'impactd'une importante partie de l'énergie dans le modèle. Les courbes sont sensiblement di�érentesen terme de rigidité, même si la course et la force de basculement sont similaires. On voit icitoute l'importance de la solution particulière dans le cas d'un montage où une bonne partie del'énergie passe dans les modes supérieurs.
Il apparaît ainsi que comme on veut à priori maximiser le pourcentage d'énergie utiliséedans les modes topologiques, la solution particulière n'a pas une importance énorme dans lesmontages réels. Cependant, prenant en compte que son coût de calcul est faible par rapportau calcul complet, il serait dommage de ne pas l'intégrer. Elle apporte réellement une meilleure�nesse des résultats et permet de mieux simuler des montages qui auront une bonne partie del'énergie dans les modes supérieurs.
2.6.3 Discussion sur la méthode de résolution
On peut voir avec les sections précédentes que la résolution en deux étapes avec deux modestopologiques est à la fois e�cace et précise. Ceci nous permet de montrer que d'une part lesparamètres at,1 et at,2 sont nécessaires pour la résolution, mais aussi su�sants (à l'exception dubasculement en mode 1 qui ne nécessite qu'un seul paramètre). Il n'est pas nécessaire d'utiliserplus de paramètres, qui n'auraient pas de signi�cation physique et de fait n'apporteraient rienà la précision de la résolution. De plus, on évite d'avoir des branches numériques fantômes,qui n'existent pas dans la réalité et devraient alors être supprimées lors du dépouillement desrésultats numériques.
La solution particulière revêt aussi une grande importance. Elle permet d'apporter à un coûtde calcul faible la précision des modes supérieurs, sans qu'elle n'intervienne dans la topologie. Ilest ainsi plus logique de la séparer des modes topologiques.

2.7 Conclusion 73
2.7 Conclusion
Nous avons présenté ici une méthode de résolution innovante, ainsi que des résultats nouveauxsur les actionnements des mécanismes bistables basés sur la barre bistable.
Si nous utilisonse en pratique cette méthode de résolution via une chronologie en deux étapes,nous ne voudrions pas faire oublier que l'analyse utilisée se base bien sur la physique même via uneanalyse topologique, sur l'existence de déformations dues aux contraintes extérieures uniquementet d'autres issues d'un phénomène de �ambement.
Aussi, nous avons pu présenter une méthode très e�cace, et qui permet de monter aisémenten modes via la séparation topologique des déformations. Nous avons aussi une méthode qui n'estpas basée sur la découpe de branche utilisée dans la littérature et ainsi permet de passer outreles limitations de cette dernière. Ainsi, on peut non seulement obtenir en une seule étape toutesles courbes caractéristiques, mais aussi résoudre les équations utilisées pour des actionnementsdi�érents, notamment les actionnements décalés. Les équations de départ restent en e�et lesmêmes, ce sont les équations des poutres, mais toute la di�culté pour les mécanismes bistablesest de les résoudre. Notre approche en ce sens est di�érente et nous permet des résultats nouveaux.
Ceci nous a permit d'exhiber une série d'exemples d'utilisation de cette méthode dans di�é-rents cas d'actionnement. On a présenté des actionnements en force, bi-encastré, en double barre,bi-rotulé, en actionnement central, décalé, et en moment.
Malgré tout, la méthode est parfaitement compatible avec les résultats de la littérature anté-rieure. Dans le cas de l'actionnement en force centrale, nous avons pu véri�er que nos résultatssont similaires aux résultats comparables précédents, notamment ceux de M. Vangbo.
Nous apportons également une analyse �ne de la répartition de l'énergie d'actionnementdans les modes de déformations, topologiques et non-topologiques. Celle-ci permet au �nal deregrouper tous les actionnements imaginables en quatre catégories topologiques, qui partagentun même fonctionnement.
Dans les chapitres suivants, nous allons développer des points qui ont retenu notre attentionlors des analyses des résultats de simulation. L'actionnement en force est tout d'abord étudié,avec une étude expérimentale que nous avons pu réaliser grâce à un banc de test. Ensuite, nousdéveloppons le cas de l'actionnement en moment. Un chapitre concernera l'aspect dynamique dubasculement, notamment le passage d'un état à l'autre. En�n, di�érents moyens d'actionnementque nous avons pu utiliser au cours de ce travail seront exposés.

74 Modélisation
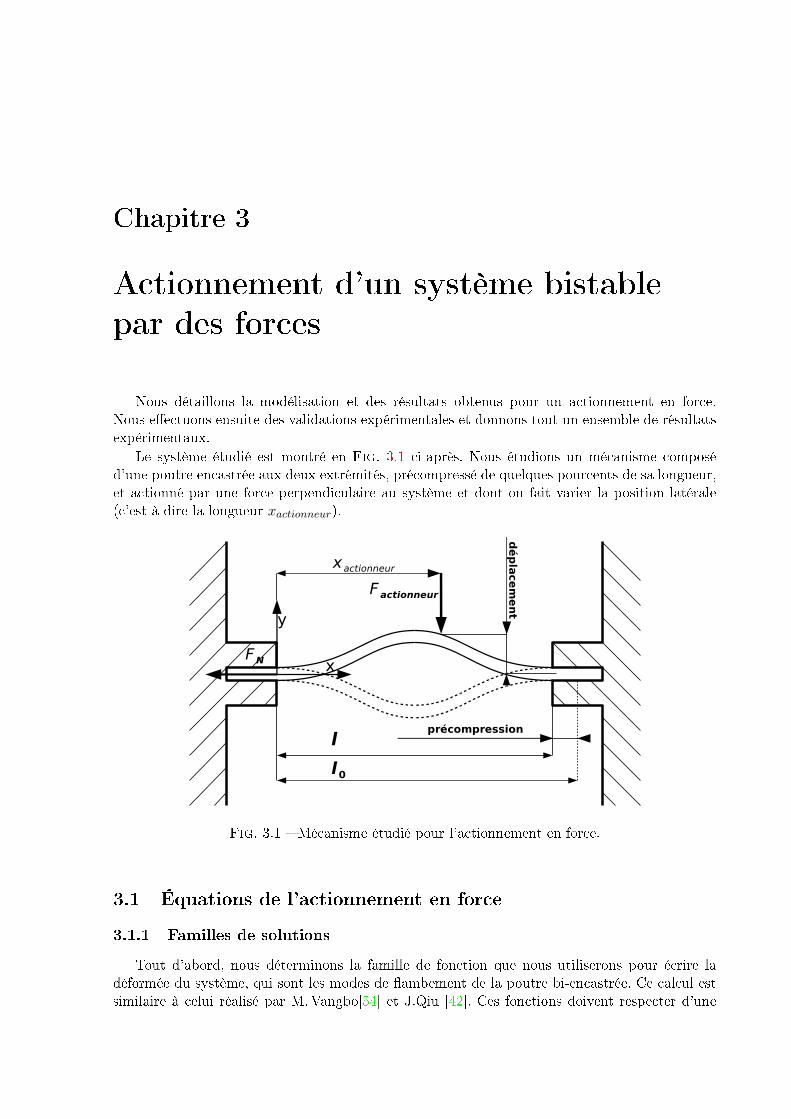
Chapitre 3
Actionnement d'un système bistablepar des forces
Nous détaillons la modélisation et des résultats obtenus pour un actionnement en force.Nous e�ectuons ensuite des validations expérimentales et donnons tout un ensemble de résultatsexpérimentaux.
Le système étudié est montré en Fig. 3.1 ci-après. Nous étudions un mécanisme composéd'une poutre encastrée aux deux extrémités, précompressé de quelques pourcents de sa longueur,et actionné par une force perpendiculaire au système et dont on fait varier la position latérale(c'est à dire la longueur xactionneur).
l0
lprécompression
Factionneur
dép
lacem
en
t y
xFN
xactionneur
Fig. 3.1 � Mécanisme étudié pour l'actionnement en force.
3.1 Équations de l'actionnement en force
3.1.1 Familles de solutions
Tout d'abord, nous déterminons la famille de fonction que nous utiliserons pour écrire ladéformée du système, qui sont les modes de �ambement de la poutre bi-encastrée. Ce calcul estsimilaire à celui réalisé par M.Vangbo[54] et J.Qiu [42]. Ces fonctions doivent respecter d'une

76 Actionnement à base de force
part l'équation des poutres d'Euler-Bernoulli [50]
E I∂4y
∂x4+ P
∂2y
∂x2= 0 (3.1)
et les conditions aux limites{encastrement horizontal en x = 0 y(0) = 0, y′(0) = 0encastrement horizontal en x = l y(l) = 0, y′(l) = 0
. (3.2)
En intégrant les conditions aux limites de l'Eq. 3.2 dans l'Eq. 3.1, on obtient une famille desolution (yi) telle que
yi =ai(cos(Ni X)−1) si Ni≡0[2π]
yi =ai((1−cos(Ni X))− 2Ni
(Ni X−sin(Ni X))) si
Ni 6=0[2π]
0=tan(
Ni
2
)−Ni
2
(3.3)
avec Yi l'application qui associe les Ni aux fonctions modales yi et Ng l'application qui donneles Ni à partir de N
Ng : i 7→
Ni = π(i + 2) si i ∈ 2N
Ni tq tan(
Ni
2
)−Ni
2= 0 dans ]π(i+1); π(i + 3)[ si i ∈ 2N+1
(3.4)
On a alors :
N(Ng)−−−−→ Ni
Y i−−−−→ (yi) avec Ng et Yi bijectifs
On obtient alors les fonctions de �ambement données en Fig. 3.2.
Fig. 3.2 � Tracé des 8 premières fonctions de �ambement dans le cas encastré-encastré.
3.1.2 Première passe : génération de la solution particulière et calcul desrépartitions d'énergie
On doit maintenant trouver une solution particulière de déformation yp. On utilise les formulesd'énergie habituelles d'énergie de �exion, de compression et de travail des forces.
On formule yp comme étant une combinaison linéaire de fonctions de �ambement, ce quiest possible puisque les fonctions de �ambement sont une base de l'espace des déformationsmécaniquement compatibles avec les conditions limites imposées ici, soit
yp =∞∑i=1
ai yi. (3.5)

3.1 Équations de l'actionnement en force 77
On fait l'approximation que yp est contenue dans le sous-espace vectoriel généré par les 20premières fonctions de �ambement, soit
yp '20∑i=1
ai yi. (3.6)
On écrit ensuite les énergies.L'énergie due à la �exion s'écrit
Uf =E I
2
∫ l
0y′′p(x)2 dx. (3.7)
L'énergie de compression est nulle pour la solution particulière.L'énergie due au travail de la force s'écrit
UF = −F yp(a) (3.8)
avec a le point d'application de la force.Pour information, dans le cas d'un actionnement réparti (comme dans le cas de [12]), on doit
utiliser la force linéique Fd et l'équation de travail des forces externes devient
UF = −∫
Fd yp(x) dx (3.9)
Il ne reste qu'à écrire l'énergie totale Utot.
Utot = Uf + UF (3.10)
On va ensuite la dériver pour obtenir la condition de stabilité.(∂Utot
∂ai= 0
)i∈[[1,20]]
(3.11)
Avec cette condition de stabilité, on peut obtenir les 20 premiers coe�cients (ai) qui, une foisréinjectés dans l'Eq. 3.6 permettront d'obtenir la solution particulière.
On peut aussi obtenir la répartition de l'énergie selon les modes.L'énergie interne de la structure est donnée par :
Uinterne =∞∑i=1
E I
2
∫ l
0ai y
′′i (x)2 dx (3.12)
où y′′p est dé�ni via les coe�cients (ai) et les familles de solutions trouvées précédemment. Onl'approxime ici par :
Uinterne '20∑i=1
E I
2
∫ l
0ai y
′′i (x)2 dx. (3.13)
On peut alors également obtenir l'énergie transmise dans chaque mode via
Umode,i =E I
2
∫ l
0y′′i (x)2 dx (3.14)
avec yi la fonction de �ambement du mode i.

78 Actionnement à base de force
On peut alors en déduire le pourcentage d'énergie transmis dans un mode i par :
Up,i =Umode,i
Uinterne(3.15)
et le pourcentage d'énergie transmis dans les modes jusqu'à n par
Un =
n∑i=1
Umode,i
Uinterne. (3.16)
3.1.3 Résolution du système et obtention des courbes caractéristiques
On doit maintenant trouver la solution complète.On formule y comme étant une combinaison linéaire de fonctions topologiques de �ambement,soit la première et la deuxième, plus la solution particulière, soit
y = at,1 y1 + at,2 y2 + yp (3.17)
On écrit ensuite les énergies.L'énergie due à la �exion s'écrit
Uf =E I
2
∫ l
0y′′(x)2 dx. (3.18)
Alors l'énergie due à la compression s'écrit
Uc =12A E ε2. (3.19)
L'énergie due au travail de la force s'écrit
UF = −F y(a). (3.20)
Il ne reste qu'à écrire l'énergie totale Utot.
Utot = Uf + Uc + UF (3.21)
On va ensuite la dériver pour obtenir la condition de stabilité.(∂Utot
∂ai= 0
)i∈{1,2}
(3.22)
On obtient alors tout un jeu de coe�cients (a1, a2). On peut les réutiliser pour obtenir le dépla-cement d, avec
d = y(a) (3.23)
où a est le point d'application de la force.On peut aussi tracer la force normale Fn en fonction de d, avec
Fn = A E ε, (3.24)
ou encore tracer l'évolution des coe�cients at,1 et at,2 en fonction de d, ou l'énergie en fonction ded. Les caractéristiques détaillées des bancs de test comprendront toutes ces courbes théoriques.

3.2 Analyse du comportement en force 79
3.2 Analyse du comportement en force
On va ici tracer les courbes force-déplacement pour di�érentes positions d'actionnement enFig. 3.3. On donne les courbes pour l'actionnement à 10%, 20%, 30%, 35%, 36,5%, 38%, 40%,45%, et en�n l'actionnement central (50%). On note que les meilleurs résultats en terme de forcede basculement sont obtenus pour un actionnement à 36,5% ou 38%. La courbe la plus rigideaux points de stabilité est la courbe en actionnement central, qui correspond à l'actionnementmode 1.
La courbe en actionnement central présente une singularité lors de la coupure de la branchemode 1 par la branche de �ambement mode 2. C'est un actionnement mode 1 pur.
Comme on avait vu précédemment, la force de basculement reste raisonnable tant que lafraction d'énergie transmise dans les modes topologiques reste acceptable (cf. Fig. 2.45(a)).
3.3 Présentation du banc de test en force
Le banc de test, montré en Fig. 3.4, est un banc prototype réalisé au CEA spéci�quementpour nos besoins de mesures. Nous avons utilisé un montage �xé sur une table à trous quadrilléede �letages M6 écartés de 25mm dans un quadrillage carré. Le système est fait de telle sorteque la poutre est placée horizontalement (au contraire du banc de test photoélasticité) et estcompressée en utilisant une platine de déplacement linéaire Thorlabs PT1 équipée d'un micro-mètre, apportant une précision statique absolue de 10µm. Ainsi, il est possible de régler trèsprécisément la précompression. La procédure consiste à poser la poutre libre de contraintes, à la�xer sur les étaux, à tourner la vis micrométrique de sorte à obtenir la précompression vouluepuis à �xer les étaux sur la table.
Le système d'appui est composé d'une potence rigide, sur laquelle est placée une secondeplatine de déplacement linéaire, montée en inverse pour des questions de rigidité (dans le senscontraire, un seul ressort vient mettre la table en butée, ce qui n'est pas su�sant ici). Une troi-sième table de translation linéaire permet de régler la position d'appui sur la longueur (avec undébattement horizontal de 25mm). Ensuite, un montage mécanique permet de déplacer verticale-ment un système d'appui en V préalablement équipé d'un capteur de force HBM S2-600 (capteurde force a double pont de jauge, en S), interfacé par un module de pont de jauge Vishey analo-gique. On peut ainsi obtenir des points expérimentaux de la caractéristique force-déplacement endéplaçant le système d'appui via la table verticale et en mesurant la force associée via la centraleVishey. On peut ensuite déplacer le système d'appui horizontalement pour mesurer des pointssur le même système mécanique mais avec une position d'appui di�érente.
On a procédé à une calibration du capteur avant les tests. Il apparaît que le système de lecturede force donne une corrélation expérimentale parfaite entre poids calibrés et forces mesurées, soitune précision réelle au 1/500 ème au vu de la précision de lecture de la centrale Vishay. La positionverticale est étalonnée au zéro via l'apparition d'un obstacle détecté par le capteur de force, cequi fait qu'on l'étalonne par rapport au haut de la poutre non-compressée. Par contre, la positionlatérale est plus di�cile à régler au zéro et on l'a étalonnée de visu avec un pied à coulisse.
3.4 Chronologie de basculement
Le banc nous a permis en plus des mesures présentées ci-après de prendre une chronographiedu basculement. On présente en Fig. 3.5 la chronologie de basculement pour le cas d'un action-nement en force décalée, à 35% de la longueur. En Fig. 3.6, on présente la chronologie pour lemême banc et l'actionnement en force centrale. Les dimensions sont précisées avec les �gures etsont les mêmes que les bancs de tests avec 2% de précompression.

80 Actionnement à base de force
(a) Montage avec appui à 50% (b) Montage avec appui à 45% (c) Montage avec appui à 40%
(d) Montage avec appui à 38% (e) Montage avec appui à36,5%
(f) Montage avec appui à 35%
(g) Montage avec appui à 30% (h) Montage avec appui à 25% (i) Montage avec appui à 20%
(j) Montage avec appui à 15% (k) Montage avec appui à 10% (l) Montage avec appui à 5%
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 3.3 � Di�érentes courbes d'actionnement avec une force que l'on translate progressivement,obtenues par simulation numérique.

3.5 Résultats expérimentaux 81
Fig. 3.4 � Le banc de test en force, ici monté avec une lame en acier inoxydable (qui n'est pasencore compressée).
On voit que la chronologie correspond bien aux topologies discutées en première partie.L'actionnement décalé utilise un mixte de mode 1 et de mode 2 et sa course active est allongéepour atteindre plus de la moitié de la course totale. L'actionnement central utilise très rapidementle mode 2 et choisit de ce fait une des branches de basculement mode 2, et bascule à mi-course.On note que si les temps de mesure sont donnés avec les images, il n'y a aucune liaison avec ledéplacement, celui-ci étant piloté à la main et non via un système robotisé pilotable.
3.5 Résultats expérimentaux
Deux séries de mesures sont présentées. La première série utilise une précompression faible,de 1,17%. Pour ce montage, nous avons utilisé un actionnement presque central, à 48% de lalongueur, et un actionnement décalé, à 39% de la longueur. Il s'agissait de réaliser un montagepuis de le caractériser (d'où les valeurs � à virgule �, 1,17%, largeur de 16,86mm . . .). Cependant,ceci nous a permis d'avoir des mesures précises que nous avons réutilisées pour sortir les courbesthéoriques qui sont présentées ici en Fig. 3.7(a) et en Fig. 3.7(c).
Une seconde série de mesures utilise d'autres dimensions et surtout une précompression plusforte, de 2%, montrées en Fig. 3.8(a) et Fig. 3.8(c). Nous avons réutilisé ce banc par la suitepour les tests de défauts et d'hystérésis, .
Dans tous ces cas, on fait une série de mesure continue, reportée directement. Cependant,nous avons aussi refait des mesures non-présentées ici pour véri�er que les tests étaient bienreproductibles.
Nous avons tracé uniquement les courbes caractéristiques force-déplacement avec les pointsthéoriques (en points) et expérimentaux (en croix). On note que comme le banc de test ne peutque pousser la poutre, seules les valeurs négatives de force sont représentées. Pour les premièresmesures, nous n'avons relevé que des valeurs avant basculement. Par contre, pour les deux mesures

82 Actionnement à base de force
(a) 50ms (b) 1 100ms (c) 2 300ms
(d) 4 750ms (e) 6 400ms (f) 8 550ms
(g) 10 000ms (h) 13 350ms (i) 14 850ms
(j) 15 100ms (k) 15 150ms (l) 15 950ms
dimensions utilisées : b=0, 02m ; h=0, 0004m ; s0 =1, 02 l ; l=0, 1m ; E =187, 5 109 Pa.
temps d'exposition : 101µs (soit 1/10 000ème), période : 20 000µs (soit 50 ips).
N.B. : le déplacement n'est pas indexé sur le temps.
Fig. 3.5 � Chronologie de l'actionnement en force décalée à 35% de la longueur.
avec une précompression de 2%, nous avons aussi relevé des valeurs après basculement, d'où lescroix qui semblent égarées près de la position stable de déplacement négatif.
Les résultats obtenus sont globalement en très bonne concordance avec la théorie, comme lemontrent les di�érentes courbes force-déplacement tracées. On fera cependant la distinction entrele cas de la force centrale et ceux de forces décalées.
Dans le cas d'une force centrale, on est dans les limites du modèle d'Euler-Bernoulli, enparticulier pour la forme de la partie singulière qui respecte peu la théorie. La rigidité apparenteet le seuil de basculement sont amoindris, via un arrondissement de la singularité de la courbe,soit la zone où intervient la coupure de branche. C'est un résultat logique puisqu'il ne peutpas exister de telle singularité dans la réalité et que par exemple J. Qiu propose une courbeexpérimentale pour son montage avec un arrondissement (léger) de la singularité.
Par contre, dans le cas de l'actionnement décalé, on se retrouve plus éloigné des les limitesde la théorie d'Euler-Bernoulli et des méthodes énergétiques. Aussi, la concordance est trèssatisfaisante.
On notera que dans le cas de la précompression de 2% une légère sur-estimation de la course

3.6 Actionnement central avec défaut 83
(a) 50ms (b) 1 650ms (c) 2 250ms
(d) 2 950ms (e) 3 550ms (f) 4 200ms
(g) 5 300ms (h) 6 300ms (i) 7 000ms
(j) 8 650ms (k) 8 700ms (l) 9 550ms
dimensions utilisées : b=0, 02m ; h=0, 0004m ; s0 =1, 02 l ; l=0, 1m ; E =187, 5 109 Pa.
temps d'exposition : 900µs (soit 1/1 111ème), période : 20 000µs (soit 50 ips).
N.B. : le déplacement n'est pas indexé sur le temps.
Fig. 3.6 � Chronologie de l'actionnement en force décalée à 50% de la longueur.
(de l'ordre de 5%) est obtenue. Nous ne l'avons pas mesurée pour les tests avec précompressionfaible.
Il apparaît par ailleurs des phénomènes d'hystérésis. Ceci a motivé les deux études suivantes,toutes deux réalisées dans le cas d'une précompression de 2%.
3.6 Etude de l'actionnement central en incluant un défaut dansla position d'actionnement
En observant la courbe expérimentale obtenue pour un actionnement central (en Fig. 3.8(a)),on voit apparaître un léger décalage au zéro, signe d'une légère hystérésis. On peut l'analysercomme une hystérésis structurelle, mais aussi comme l'apparition de l'hystérésis due à l'existencede deux branches. On va créer un léger décalage sur la position d'actionnement de la simulation,un décalage de 0,5% de la longueur, un cas très particulier d'actionnement décalé. Nous avonsensuite superposé les résultats théoriques à la simulation précédente, ce qui donne la Fig. 3.9.
Avec cette simulation, la bifurcation de branche mode 1 mode 2 disparaît et les singularités

84 Actionnement à base de force
(a) Caractéristique Force-déplacement, valeurs théoriques (points)et expérimentales (croix), actionnement à 48%.
Répartition de l'énergieMode 1 98,15%Modes 1&2 98,55%Modes 1 à 3 idemModes 1 à 4 98,62%Modes 1 à 5 99,73%Modes 1 à 6 99,78%Modes 1 à 7 99,79%
(b) répartition de l'énergie dans lesmodes, actionnement à 48%
(c) Caractéristique Force-déplacement, valeurs théoriques (points)et expérimentales (croix), actionnement à 39%.
Répartition de l'énergieMode 1 89,42%Modes 1&2 97,50%Modes 1 à 3 98,74%Modes 1 à 4 99,21%Modes 1 à 5 99,30%Modes 1 à 6 99,45%Modes 1 à 7 99,87%
(d) répartition de l'énergie dans lesmodes, actionnement à 39%
dimensions utilisées : b=0,01686m ; h=0,0004m ; s0 =1,0117 l ; l=0,08222m ; E =187,5 109 Pa.
Fig. 3.7 � Courbes force-déplacement et répartition d'énergie obtenues sur le banc de test avecla première poutre.
sont arrondies, ce pour un simple déplacement de 0,5% de la longueur, soit 500µm. La courbeobtenue semble bien meilleure que la précédente, avec une petite hystérésis, une courbe en Narrondie. Ceci montre que le cas de l'actionnement central est réellement un cas particulier, uncas uniquement théorique qui n'existe pas à priori puisqu'on aura forcément un petit défaut etque l'intégration de ce simple petit défaut permet d'obtenir une courbe qui correspond mieuxaux résultats expérimentaux.
Si on a bien supprimé la singularité, il reste malgré tout un surplus d'hystérésis. On obtientune excellente superposition pour un actionnement théorique décalé à 48%, mais le décalagesemble trop important pour se justi�er comme un défaut du banc de test. On rappelle que laprécision de la table de translation est de 10µm à laquelle on peut ajouter un défaut de calibrationde la position. Cependant, l'écart est trop important pour s'expliquer (2% de la longueur feraient2mm, bien plus que les erreurs attendues) et nous avons cherché ensuite à savoir s'il existe desphénomènes d'hystérésis supplémentaires qui expliqueraient ce défaut.
3.7 Présence d'hystérésis lors de l'actionnement, étude expéri-mentale
Pour bien observer l'hystérésis, tout en utilisant le même montage, nous avons modi�é laposition d'actionnement, l'actionnement central ne permettant pas de bien distinguer les di�é-rents phénomènes. Il y a en e�et deux branches superposées en actionnement exactement central,
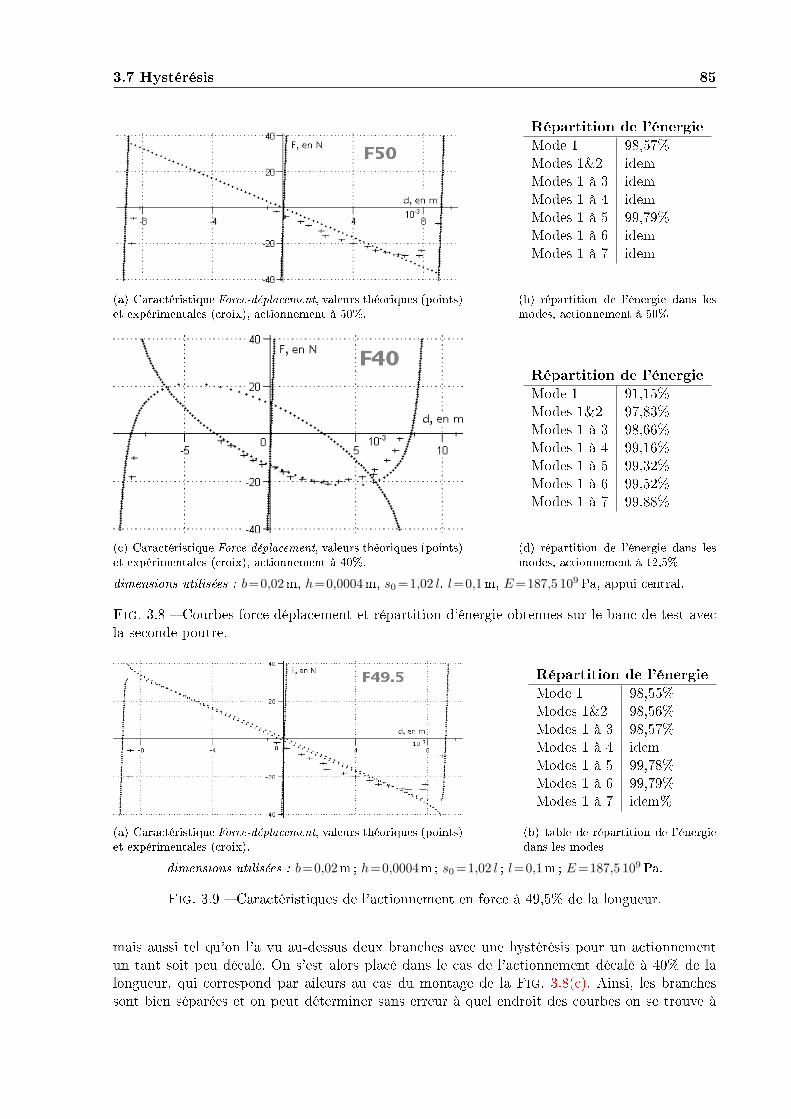
3.7 Hystérésis 85
(a) Caractéristique Force-déplacement, valeurs théoriques (points)et expérimentales (croix), actionnement à 50%.
Répartition de l'énergieMode 1 98,57%Modes 1&2 idemModes 1 à 3 idemModes 1 à 4 idemModes 1 à 5 99,79%Modes 1 à 6 idemModes 1 à 7 idem
(b) répartition de l'énergie dans lesmodes, actionnement à 50%
(c) Caractéristique Force-déplacement, valeurs théoriques (points)et expérimentales (croix), actionnement à 40%.
Répartition de l'énergieMode 1 91,15%Modes 1&2 97,83%Modes 1 à 3 98,66%Modes 1 à 4 99,16%Modes 1 à 5 99,32%Modes 1 à 6 99,52%Modes 1 à 7 99,88%
(d) répartition de l'énergie dans lesmodes, actionnement à 12,5%
dimensions utilisées : b=0,02m, h=0,0004m, s0 =1,02 l, l=0,1m, E =187,5 109 Pa, appui central.
Fig. 3.8 � Courbes force-déplacement et répartition d'énergie obtenues sur le banc de test avecla seconde poutre.
(a) Caractéristique Force-déplacement, valeurs théoriques (points)et expérimentales (croix).
Répartition de l'énergieMode 1 98,55%Modes 1&2 98,56%Modes 1 à 3 98,57%Modes 1 à 4 idemModes 1 à 5 99,78%Modes 1 à 6 99,79%Modes 1 à 7 idem%
(b) table de répartition de l'énergiedans les modes
dimensions utilisées : b=0,02m ; h=0,0004m ; s0 =1,02 l ; l=0,1m ; E =187,5 109 Pa.
Fig. 3.9 � Caractéristiques de l'actionnement en force à 49,5% de la longueur.
mais aussi tel qu'on l'a vu au-dessus deux branches avec une hystérésis pour un actionnementun tant soit peu décalé. On s'est alors placé dans le cas de l'actionnement décalé à 40% de lalongueur, qui correspond par aileurs au cas du montage de la Fig. 3.8(c). Ainsi, les branchessont bien séparées et on peut déterminer sans erreur à quel endroit des courbes on se trouve à

86 Actionnement à base de force
tout moment.Le principe du test est d'enfoncer peu à peu la poutre, tout en restant dans la zone stable,
soit ne jamais dépasser le moment où la force de réaction de négative devient positive. Ainsi,nous ne basculons pas vers l'autre position stable. Proches du point de basculement, nous faisonsdemi-tour et revenons vers la zone stable.
Le résultat de ce test est présenté en Fig. 3.10. Celle-ci incorpore une seule série de mesure,sans �ltrage ou moyennage. En e�et, utiliser un moyennage sur plusieurs séries ferait perdre toutechronologie au test et ne rendrait pas compte de la dispersion obtenue lors d'un test, �agranteet bien supérieure à la précision du montage.
Fig. 3.10 � Courbe f-d théorique (en points) superposée au mesures expérimentales (en ligne)d'hystérésis de branche.
Une forte hystérésis et une large dispersion sont obtenues. Ceci montre que le système ne secomporte pas comme un système parfaitement élastique.
3.8 Discussion
Les deux tests précédents permettent de conclure quand à l'existence de deux hystérésisdi�érentes, comme montré en Fig. 3.11.
Une première hystérésis est due au basculement et à la géométrie du mécanisme. On peutla déterminer par les études statiques énergétiques. C'est celle-ci qui donne l'impression que lebasculement du système est retardé lorsqu'on est dans le cas de l'actionnement décalé, et quiallonge la zone stable.
A contrario, il existe aussi une hystérésis plus classique, l'hystérésis de branche, qui suit lesbranches de déformations et qui conduit à ce qu'un cycle aller-retour le long d'une branche créeune boucle.
Ces deux phénomènes cohabitent. Cependant, dans le cas de l'actionnement central, parceque les branches sont très proches, ils semblent cohabiter et se cumuler.
Les études de la littérature qui incluent une étude expérimentale, tel [45], montrent aussil'existence de cette hystérésis sans l'expliquer. Cependant, l'étude de l'actionnement décalé est

3.9 Conclusion 87
Hystérésis du mécanisme
0
Force
déplacement
Hystérésis de branche
cycle d'hystérésis de branche
Fig. 3.11 � Coexistence de deux hystérésis, de branche et du mécanisme.
spéci�que à nos travaux et n'est pas montrée ailleurs. La cause de l'existence de cette hystérésisest peu discutée dans la littérature.
Une partie de celle-ci est due à l'actionnement mode 2 puisque même un très faible dépla-cement latéral apporte un peu d'hystérésis. C'est quelque chose de nouveau que nous pouvonsà présent expliquer grâce à l'étude des actionnements décalés. Cependant, une grande partieest due aux phénomènes d'hystérésis classique, à priori matériaux. Nous souhaiterions comparernos résultats, obtenus pour un acier avec ce qu'on obtiendrait par exemple pour un matériaubeaucoup plus proche des hypothèses élastiques, comme du Silicium. Malheureusement, nous nedisposons pas du matériel de fabrication adéquat.
3.9 Conclusion
Nous avons pu présenter dans ce chapitre la méthode et les résultats de simulation dans le casspéci�que de la force normale, tant pour une force centrale que décalée. Un système très rigidepour un actionnement central est ainsi obtenu, il est par contre plus souple en actionnementdécalé. Par dichotomie, on trouve pour nos dimensions un optimum d'actionnement (en termede minimum de force seuil de basculement) à environ 38% de la longueur.
Le banc de test nous a permis d'obtenir des mesures de courbes force-déplacement. Nouspouvons conclure grâce à ces dernières que le modèle est très bien respecté autant pour unactionnement central, ce qui était attendu puisque des études précédentes proposent les mêmesrésultats, mais aussi pour un actionnement décalé. Ceci prouve la pertinence du modèle que nousproposons.
Celui-ci permet d'obtenir une très bonne courbe force-déplacement, comme développé dansdi�érentes �gures de ce chapitre. Mais de plus, l'observation des chronographes montre que latopologie avec deux modes est très bien suivie par le montage expérimental. On voit clairementapparaître le premier puis le second mode lors du basculement.
Nous nous sommes aussi intéressés à l'hystérésis, qui apparaît lors des expériences. Notreétude permet d'expliquer l'hystérésis due au choix de branche, qui vient de l'actionnement décalémême lors d'un montage quasi-central. Il reste cependant un surplus d'hystérésis qui provient

88 Actionnement à base de force
vraisemblablement d'un comportement hystérétique du matériau, que l'on ne peut pas étudierdavantage à l'heure actuelle.
Un point à noter est que nous avons utilisé des forces très importantes pour ce banc de test,de 20 à 40N. Même si ce n'est pas gigantesque, il est di�cile d'imaginer actionner un tel systèmepar des matériaux actifs, à moins de s'orienter vers les AMF. Aussi, il faut considérer le montageexpérimental avant tout comme un banc de test, ce qui est sa vocation première. Il nous a permisde valider avec beaucoup de précision nos simulations numériques, et ce avec succès.
Chapitre 4
Actionnement d'un système bistablepar des moments localisés ou répartis
Dans ce chapitre, nous nous intéressons au cas de l'actionnement en moment. Nous débutonspar le cas de l'actionnement par moment externe unique, suivi de celui par deux couples quipeut être utilisé pour certains montages et présente plus de richesse au niveau du comportement(mode 1, mode 2 et modes 1 et 2 combinés).
Ensuite, nous passons à un cas particulier, l'actionnement par moment réparti interne à lastructure. Ceci va nous permettre de préparer le banc de test avec actionnement par polymèresélectro-actifs.
Dans une seconde partie de ce chapitre, nous présentons un cas d'utilisation d'un actionneurà matériau actif, un MFC, que nous avons utilisé pour piloter un mécanisme bistable. Celui-cicrée un moment réparti qui nous sert à piloter le basculement.
4.1 Modèle et paramétrage
4.1.1 Mécanisme étudié
Nous modélisons ici une poutre �ambée entre deux encastrements actionnée par moment,présentée en Fig. 4.1. Il s'agit toujours d'un mécanisme bistable basé sur une plaque �ambée,auquel on applique un couple à la position xM . Le modèle retenu est toujours le modèle poutred'Euler-Bernoulli. Le mécanisme est plan.
On note que, spéci�cité des actionnements couples, la sortie (déplacement d) n'est pas di-rectement liée à l'entrée d'actionnement. On pourrait cependant faire coïncider les positions desentrées/sorties, mais ceci n'aurait alors toujours pas de signi�cation physique. Nous avons déjàabordé la question du choix des paramètres de sortie en section 2.4.4. Dans le cas présent, lemécanisme sert à transformer un actionnement à base de couple en déplacement et raideur. Defaçon intrinsèque, ce mécanisme sépare les entrées des sorties.
Les paramètres géométriques sont la largeur b, l'épaisseur h, la longueur l et la longueur àvide l0. Les dimensions utilisées par la suite sont b = 4mm ; h = 0, 175mm ; l = 38mm ; l0 =38,042mm.
Ceci correspond à une précompression de 0,11%. Le module de Young retenu est E =250MPa,celui d'un polymère. On dé�nit aussi les paramètres de sortie, soit le déplacement d, donné à lamoitié de la poutre, un paramètre de position �xe comme expliqué ci-dessus. En�n, on dé�nitles paramètres d'entrées, soit le couple M et sa position xM que l'on va translater pour étudierle comportement du mécanisme en fonction de ces di�érentes positions.
Nous nous contentons d'un seul couple au début pour montrer l'exemple le plus simple.

90 Actionnement à base de moment
l0
l /2
bh
d
M
xM
l
Fig. 4.1 � Paramétrage du mécanisme étudié, une poutre bistable encastrée-encastrée actionnéepar moment.
Cette partie n'est que théorique cependant, nous étendrons ce cas de travail ce travail pour lamodélisation des actionnements en moments répartis.
4.1.2 Mécanique du basculement
La mécanique du basculement est schématisée en Fig. 4.2. Elle est composée de 4 étapes.En 1, le mécanisme est au repos.En 2, l'actionnement couple déforme le bistable qui prend une forme complexe, combinaison desmodes 1 et 2 et de la solution particulière.En 3, le mode 1 disparaît et le système est uniquement �ambé en mode 2 (la fonction singulièreétant également nulle puisque M =0, le mode 2 étant forme d'équilibre à vide). Le basculementintervient juste après ce point. On note que le déplacement est nul en ce point du fait de lasymétrie du mode 2 par rapport au point médian.En�n en 4, on a basculé et atteint la seconde position stable.
4.2 Modélisation
On présente ici le modèle utilisé pour le calcul du comportement du mécanisme bistable.On fait ici encore l'hypothèse des petits déplacements, hypothèse réaliste dans le cas d'uneprécompression faible.
4.2.1 Écriture des déformées
Comme pour le cas d'un actionnement à base de force, on va écrire les déformées en utilisantune décomposition topologique sur la base de �ambement. On utilise la méthode développée auchapitre 2.

4.2 Modélisation 91
1
3
4
2
Basculement
d M=0
d
d
M
M=0
Fig. 4.2 � Mécanique du basculement en moments.
La déformée s'écrit comme la somme des deux fonctions topologiques plus la déformée par-ticulière, soit :
y = a1 yt,1 + a2 yt,2 + yp. (4.1)
où yt,1, yt,2, et yp sont respectivement les déformées des modes 1, 2 et la déformée particulière.a1 et a2 sont des coe�cients dans R.
S'il y a plusieurs actionneurs indépendants, on peut utiliser une solution particulière paractionneur et l'équation précédente devient
y = a1 yt,1 + a2 yt,2 +∑
j
yp,j (4.2)
où j indexe les actionneurs. L'autre alternative est d'inclure l'action de tous les actionneurs dansune seule fonction énergie comme nous le faisons dans ce travail.
4.2.2 Écriture des énergies
On va maintenant écrire l'énergie totale comme la somme des énergies internes (compressionet �exion en modèle poutre d'Euler-Bernoulli) et externes (travail des moments localisés etrépartis).On rappelle l'énergie due à la compression :
Uc =12A E ε2 (4.3)
L'énergie due à la �exion s'écrit
Uf =E I
2
∫ l
0y′′(x)2 dx. (4.4)

92 Actionnement à base de moment
L'énergie due au moment extérieur est équivalente au travail de ce moment soit
UM = −M y′(xM ) (4.5)
avec y′(xM ) = θ(xM ) la rotation de la section droite.Pour information, dans le cas d'un actionnement réparti, on doit utiliser le moment linéique Md
et l'équation de travail des moments externes devient
UM = −∫
Md y′(x) dx. (4.6)
N.B. : On obtient aussi la force de compression :
Fcompression = A E ε. (4.7)
On peut alors écrire l'énergie totale du mécanisme :
Utot = UM + Uc + Uf . (4.8)
4.2.3 Équilibre
La méthode pour obtenir les positions d'équilibre est identique à celle utilisée pour la résolu-tion en force, en utilisant la formule d'énergie précédente.
4.2.4 Résolution
On va maintenant résoudre les équations d'équilibre en utilisant une résolution en deuxétapes, comme présenté en section 2.2.10. On résout d'abord le système sans compression pourobtenir la solution particulière, puis avec compression en utilisant comme seuls coe�cients libresles amplitudes des deux premiers modes de �ambement. On fait alors varier le moment M pourobtenir tous les points qui nous intéressent.
On trace di�érentes courbes. La courbe principale est la courbe moment-déplacement, c'està dire la courbe entrée/sortie. On donne ensuite la solution particulière ou déformée d'équilibre,qui permet de visualiser comment la poutre se déforme hors compression. La répartition d'énergieest également donnée dans un tableau qui indique la répartition de l'énergie présente dans lesmodes.
On donne la courbe de force normale en fonction du déplacement, qui renseigne sur la com-pression de la poutre. Cette courbe est coupée pour plus de lisibilité, puisque la branche instablede basculement en mode 1 donne une force de compression très élevée.
On donne aussi les variations des coe�cients a1 et a2 en fonction du déplacement. Ces courbessont coupées automatiquement puisqu'on se limite à une plage donnée de M (ou Md), la mêmeque la plage utilisée pour la courbe entrée/sortie.
En�n, les con�gurations trouvées sont tracées sur un exemple de moment (ici M =3,75 µNm,on doit être en dessous du moment seuil de basculement) pour visualiser les di�érentes branchesdu comportement du mécanisme. Par soucis de lisibilité, les déformations verticales sont forte-ment dilatées.
4.3 Comportement théorique dans le cas d'un actionnement couplelocalisé unique
On a tracé les résultats pour di�érentes positions d'actionnement entre le bord gauche et lecentre de le poutre. Les actionnements sur la demi-longueur de droite se déduisent de ceux-ci

4.3 Actionnement couple unique 93
par symétrie. On part du centre (M50), et on se rapproche par trois fois du bord gauche, avecun déplacement régulier d'un huitième de la longueur, à 37,5%, 25% puis 12,5%. Les résultatsprincipaux sont donnés en Fig. 4.3.
Un cas particulier est l'actionnement central (cf. Fig. 4.3(a)). On voit dans le tableau derépartition de l'énergie qu'aucune énergie n'est transmise dans le mode 1. Ceci en fait un ac-tionnement en mode 2 � pur �, comme expliqué en section 2.4. Ce type d'actionnement est àéviter.
Les cas suivants, actionnement aux trois-huitièmes, au quart et au huitième de la longueur dela poutre sont tous trois des actionnements combinés modes 1 et 2, donc avec saut de branche.Ils ont la forme des courbes des actionnements modes 1 et 2 avec pour sortie le déplacement dupoint central. Ainsi, le saut de branche n'est pas net car les deux branches stables sont tangentesen zéro, mais bien présent (cf. la section 2.4.4). La répartition d'énergie dans les deux premiersmodes est assez variable, soit de 56% à 71%, mais reste faible. Le moment seuil de basculementreste aux alentours de 8µNm malgré un déplacement conséquent du point d'actionnement, soitquand même une baisse de 40% par rapport à l'actionnement central qui était lui à 13µNm.

94 Actionnement à base de moment
(a) Caractéristique Moment-déplacement 50%
Répartition de l'énergieMode 1 0%Modes 1&2 66,53%Modes 1 à 3 idemModes 1 à 4 77,71%Modes 1 à 5 idemModes 1 à 6 86,44%Modes 1 à 7 idem
(b) répartition de l'énergie dans lesmodes, actionnement à 50%
(c) Caractéristique Moment-déplacement 37,5%
Répartition de l'énergieMode 1 39,1%Modes 1&2 56,00%Modes 1 à 3 75,54%Modes 1 à 4 78,58%Modes 1 à 5 82,92%Modes 1 à 6 87,36%Modes 1 à 7 idem
(d) répartition de l'énergie dans lesmodes, actionnement à 37,5%
(e) Caractéristique Moment-déplacement 25%
Répartition de l'énergieMode 1 65,62%Modes 1&2 71,23%on l'avait Modes 1 à 3 idemModes 1 à 4 79,77%Modes 1 à 5 87,06%Modes 1 à 6 90,28%Modes 1 à 7 idem
(f) répartition de l'énergie dans les modes,actionnement à 25%
(g) Caractéristique Moment-déplacement 12,5%
Répartition de l'énergieMode 1 36,71%Modes 1&2 58,28%Modes 1 à 3 76,63%Modes 1 à 4 83,66%Modes 1 à 5 87,35%Modes 1 à 6 88,05%Modes 1 à 7 idem
(h) répartition de l'énergie dans lesmodes, actionnement à 12,5%
Fig. 4.3 � Courbes moment-déplacement et répartition d'énergie du bistable en actionnementmoment unique
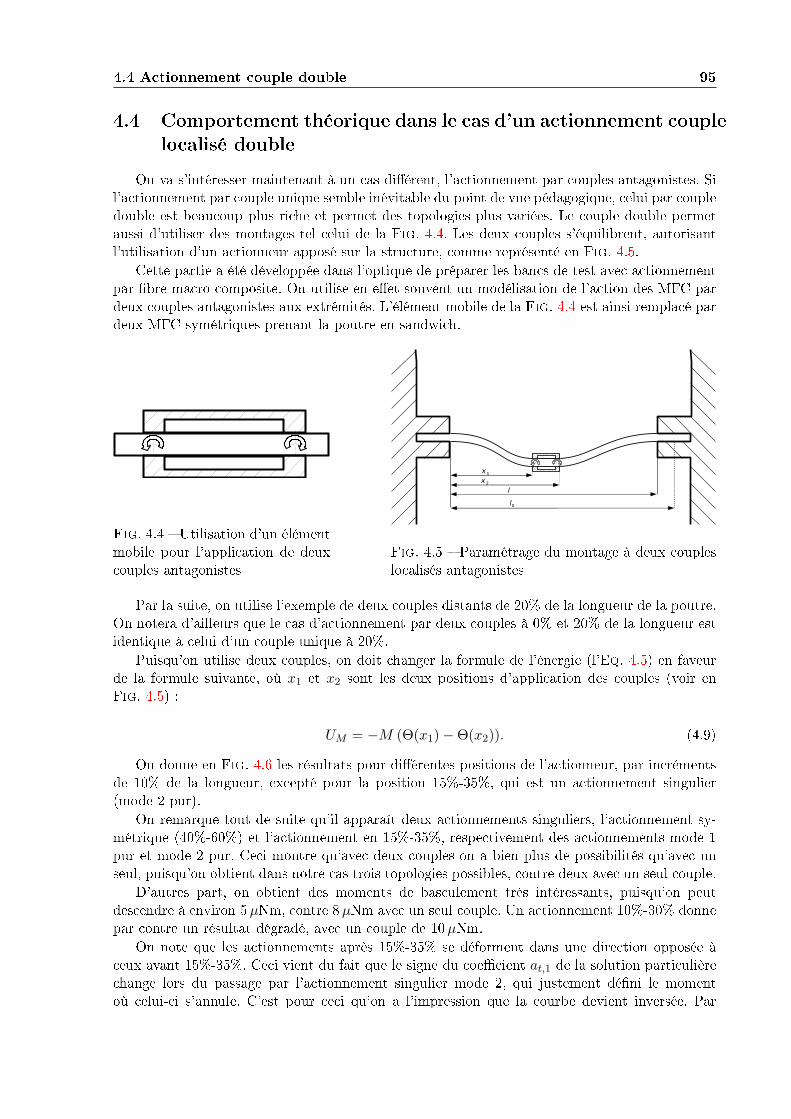
4.4 Actionnement couple double 95
4.4 Comportement théorique dans le cas d'un actionnement couplelocalisé double
On va s'intéresser maintenant à un cas di�érent, l'actionnement par couples antagonistes. Sil'actionnement par couple unique semble inévitable du point de vue pédagogique, celui par coupledouble est beaucoup plus riche et permet des topologies plus variées. Le couple double permetaussi d'utiliser des montages tel celui de la Fig. 4.4. Les deux couples s'équilibrent, autorisantl'utilisation d'un actionneur apposé sur la structure, comme représenté en Fig. 4.5.
Cette partie a été développée dans l'optique de préparer les bancs de test avec actionnementpar �bre macro-composite. On utilise en e�et souvent un modélisation de l'action des MFC pardeux couples antagonistes aux extrémités. L'élément mobile de la Fig. 4.4 est ainsi remplacé pardeux MFC symétriques prenant la poutre en sandwich.
Fig. 4.4 � Utilisation d'un élémentmobile pour l'application de deuxcouples antagonistes
l0
lx2
x1
Fig. 4.5 � Paramétrage du montage à deux coupleslocalisés antagonistes
Par la suite, on utilise l'exemple de deux couples distants de 20% de la longueur de la poutre.On notera d'ailleurs que le cas d'actionnement par deux couples à 0% et 20% de la longueur estidentique à celui d'un couple unique à 20%.
Puisqu'on utilise deux couples, on doit changer la formule de l'énergie (l'Eq. 4.5) en faveurde la formule suivante, où x1 et x2 sont les deux positions d'application des couples (voir enFig. 4.5) :
UM = −M (Θ(x1)−Θ(x2)). (4.9)
On donne en Fig. 4.6 les résultats pour di�érentes positions de l'actionneur, par incrémentsde 10% de la longueur, excepté pour la position 15%-35%, qui est un actionnement singulier(mode 2 pur).
On remarque tout de suite qu'il apparaît deux actionnements singuliers, l'actionnement sy-métrique (40%-60%) et l'actionnement en 15%-35%, respectivement des actionnements mode 1pur et mode 2 pur. Ceci montre qu'avec deux couples on a bien plus de possibilités qu'avec unseul, puisqu'on obtient dans notre cas trois topologies possibles, contre deux avec un seul couple.
D'autres part, on obtient des moments de basculement très intéressants, puisqu'on peutdescendre à environ 5µNm, contre 8µNm avec un seul couple. Un actionnement 10%-30% donnepar contre un résultat dégradé, avec un couple de 10µNm.
On note que les actionnements après 15%-35% se déforment dans une direction opposée àceux avant 15%-35%. Ceci vient du fait que le signe du coe�cient at,1 de la solution particulièrechange lors du passage par l'actionnement singulier mode 2, qui justement dé�ni le momentoù celui-ci s'annule. C'est pour ceci qu'on a l'impression que la courbe devient inversée. Par

96 Actionnement à base de moment
contre, en terme d'énergie, on ne voit pas ce changement de signe, l'énergie de déformation étantforcément positive.
(a) 0,4-0,6 (b) 0,3-0,5
(c) 0,2-0,4 (d) 0,15-0,35
(e) 0,1-0,3 (f) 0-0,2
Répartition de l'énergieModes 1 1& 2 1 à 3 1 à 4 1 à 5 1 à 6 1 à 7
40-60% 46% 46% 77,23% 77,23% 90,81% 90,81% 93,73%30-50% 31,56% 58,40% 61,41% 84,85% 86,19% 91,43% 93,43%20-40% 5,11% 51,30% 74,22% 74,29% 84,48% 92,16% 92,48%15-35% 0% 32,26% 70,42% 82,78% 82,78% 87,96% 91,60%10-30% 6,25% 17,31% 45,35% 77,01% 89,48% 90,18% 90,67%0-20% 58,51% 74,09% 79,67% 80,13% 82,62% 88,67% 92,33%
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.6 � Di�érentes courbes E/S d'actionnements en moments antagonistes. Les positions desmoments sont données en fraction de la longueur.
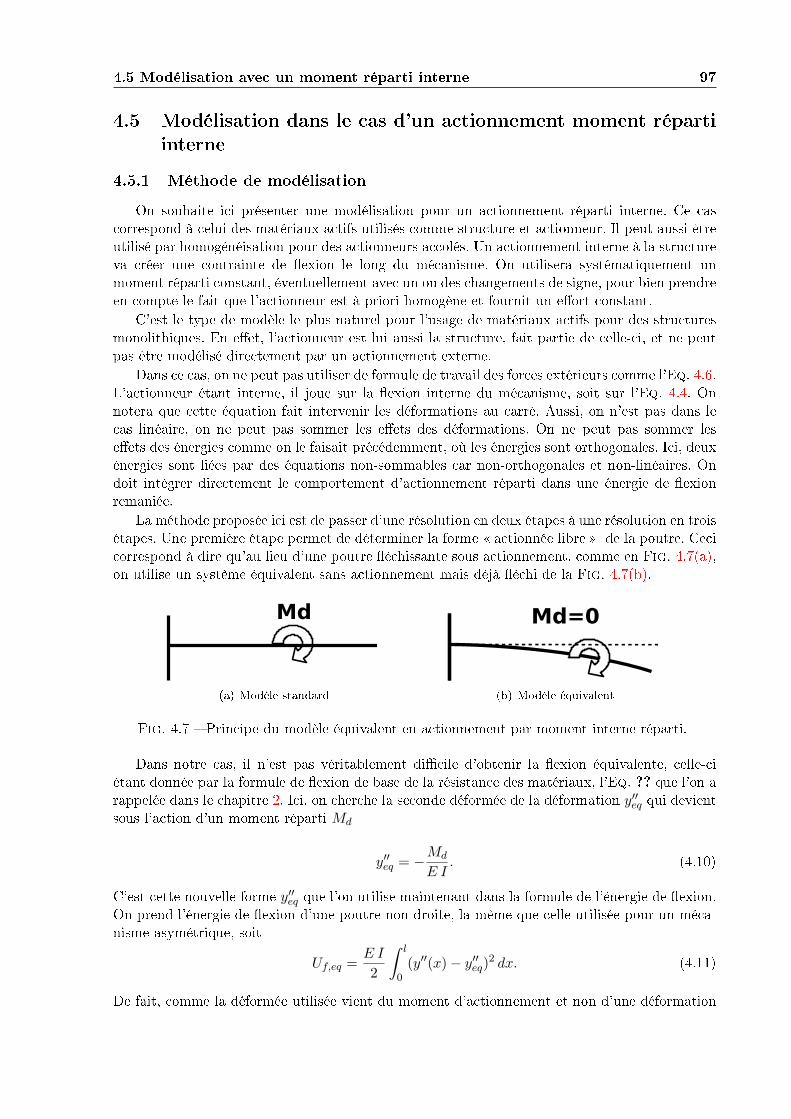
4.5 Modélisation avec un moment réparti interne 97
4.5 Modélisation dans le cas d'un actionnement moment répartiinterne
4.5.1 Méthode de modélisation
On souhaite ici présenter une modélisation pour un actionnement réparti interne. Ce cascorrespond à celui des matériaux actifs utilisés comme structure et actionneur. Il peut aussi êtreutilisé par homogénéisation pour des actionneurs accolés. Un actionnement interne à la structureva créer une contrainte de �exion le long du mécanisme. On utilisera systématiquement unmoment réparti constant, éventuellement avec un ou des changements de signe, pour bien prendreen compte le fait que l'actionneur est à priori homogène et fournit un e�ort constant.
C'est le type de modèle le plus naturel pour l'usage de matériaux actifs pour des structuresmonolithiques. En e�et, l'actionneur est lui aussi la structure, fait partie de celle-ci, et ne peutpas être modélisé directement par un actionnement externe.
Dans ce cas, on ne peut pas utiliser de formule de travail des forces extérieurs comme l'Eq. 4.6.L'actionneur étant interne, il joue sur la �exion interne du mécanisme, soit sur l'Eq. 4.4. Onnotera que cette équation fait intervenir les déformations au carré. Aussi, on n'est pas dans lecas linéaire, on ne peut pas sommer les e�ets des déformations. On ne peut pas sommer lese�ets des énergies comme on le faisait précédemment, où les énergies sont orthogonales. Ici, deuxénergies sont liées par des équations non-sommables car non-orthogonales et non-linéaires. Ondoit intégrer directement le comportement d'actionnement réparti dans une énergie de �exionremaniée.
La méthode proposée ici est de passer d'une résolution en deux étapes à une résolution en troisétapes. Une première étape permet de déterminer la forme � actionnée libre � de la poutre. Cecicorrespond à dire qu'au lieu d'une poutre �échissante sous actionnement, comme en Fig. 4.7(a),on utilise un système équivalent sans actionnement mais déjà �échi de la Fig. 4.7(b).
Md
(a) Modèle standard
Md=0
(b) Modèle équivalent
Fig. 4.7 � Principe du modèle équivalent en actionnement par moment interne réparti.
Dans notre cas, il n'est pas véritablement di�cile d'obtenir la �exion équivalente, celle-ciétant donnée par la formule de �exion de base de la résistance des matériaux, l'Eq. ?? que l'on arappelée dans le chapitre 2. Ici, on cherche la seconde déformée de la déformation y′′eq qui devientsous l'action d'un moment réparti Md
y′′eq = −Md
E I. (4.10)
C'est cette nouvelle forme y′′eq que l'on utilise maintenant dans la formule de l'énergie de �exion.On prend l'énergie de �exion d'une poutre non-droite, la même que celle utilisée pour un méca-nisme asymétrique, soit
Uf,eq =E I
2
∫ l
0(y′′(x)− y′′eq)
2 dx. (4.11)
De fait, comme la déformée utilisée vient du moment d'actionnement et non d'une déformation

98 Actionnement à base de moment
initiale, on utilise directement la formule d'énergie de �exion équivalente suivante
Uf,eq =E I
2
∫ l
0
(y′′(x) +
Md
E I
)2 dx. (4.12)
Ensuite comme l'actionnement est pris en compte comme une énergie interne, il n'y a pas lieud'ajouter un travail des moments extérieurs et on obtient au �nal une énergie sous la forme
Utot = Uc + Uf,eq (4.13)
que l'on utilise pour les deux étapes de résolution, la première avec une énergie de compressionnulle, la seconde en prenant en compte l'énergie de compression pour obtenir les caractéristiqueshabituelles.
4.5.2 Exemples d'actionnement en moment réparti interne
On donne pour exemples plusieurs montages en actionnement réparti interne. Le premier casconsiste à utiliser un seul élément actif tout le long de la structure. Ce montage est représentéen Fig. 4.8 et les caractéristiques associées présentées en Fig. 4.14. Il n'y a pas d'inversiondu signe de Md. On note que dans ce cas un actionnement externe équivalent en deux couplesaux extrémités ne donne pas de déformation de la poutre, les couples étant appliqués sur desextrémités rigides. C'est d'ailleurs ce cas simple qui nous a poussé à développer une résolutionen moment réparti et non par moments antagonistes aux extrémités équivalents.
Fig. 4.8 � Montage avec un élément actif de 0 à 100% de la poutre.
Deux autres montages utilisent la moitié de la poutre. Le premier une seule moitié (commeschématisé en Fig. 4.9), le second les deux moitiés avec changement de signe du moment réparti(comme schématisé en Fig. 4.10). Les caractéristiques sont données respectivement en Fig. 4.15et en Fig. 4.16.
Fig. 4.9 � Montage avec un élément actifde 0 à 50% de la poutre.
Fig. 4.10 � Montage avec deux éléments ac-tifs de 0 à 50% et 50% à 100% de la poutre.
Ensuite, on va s'intéresser à l'usage de trois éléments actifs. C'est d'ailleurs ce qui est utilisédans la publication de Rossister et al. dont on a repris ici les dimensions. Tout d'abord, le casprécis de cette publication, soit un actionnement réparti en trois éléments placés de 0 à 25% de lalongueur, puis un élément de couple opposé de 25% à 75% et en�n un troisième de 75% à 100%.Ce montage est représenté en Fig. 4.11 et les caractéristiques associées présentées en Fig. 4.17.
Pour voir si ce choix de coupure à 25% est vraiment judicieux, on va déplacer légèrement lespositions des inversions de signe, et passer à des éléments placés de 0 à 20% de la longueur, puis

4.5 Modélisation avec un moment réparti interne 99
Fig. 4.11 � Montage avec trois éléments ac-tifs de 0 à 25%, puis 25% à 75%, puis 75%à 100% de la poutre.
Fig. 4.12 � Montage avec trois éléments ac-tifs de 0 à 20%, 20% à 80%, puis 80% à100% de la poutre
20% à 80% (couple opposé) et en�n un troisième de 80% à 100%. Ce montage est représenté enFig. 4.12 et les caractéristiques associées présentées en Fig. 4.18.
Pour ne pas rester dans les cas symétriques, un autre cas est présenté avec trois élémentsplacés de 0 à 25% de la longueur, puis un élément de couple opposé de 25% à 50% et en�n untroisième de 50% à 100%. Ce montage est représenté en Fig. 4.13 et les caractéristiques associéesprésentées en Fig. 4.17.
Fig. 4.13 � Montage avec trois éléments actifs de 0 à 25%, puis 25% à 50%, puis 50% à 100%de la poutre.
4.5.3 Discussion
Le premier actionnement, par un seul élément, est on le voit un cas particulier. Il s'agitd'un actionnement modes supérieurs, soit la quatrième topologie tel que présenté en 2.4. C'estl'occasion de montrer les résultats obtenus pour un tel actionnement.
La première observation est que la solution particulière est très perturbée. On a l'impressiond'une courbe très peu régulière, qui peut di�cilement sembler réaliste. Mais il faut observerl'échelle des ordonnées, qui indique une déformation extrêmement faible. C'est que l'actionne-ment est ine�cace. La déformation obtenue est en fait due aux erreurs de calculs, liés à laprécision choisie. Ici, on peut considérer que l'algorithme ne trouve pas de déformation, ce quirend non-signi�catif le calcul de l'énergie. De plus, on obtient alors des branches verticales pourla caractéristique moment-déplacement, signe de l'indépendance des déformées à la contrainte.De même, les caractéristiques force normale-déplacement et des coe�cients a1 et a2 ne présententqu'un nombre réduit de points, qui correspondent aux deux positions stables (déformations mode1) et instables (déformations mode 2), plus la con�guration complètement droite. Ces déforméessont visibles en Fig. 4.14(f).
Ce résultat ne se conforme pas à la méthode de résolution proposée, puisqu'on supposequ'il existe deux modes de déformations privilégiés, les modes 1 et 2. Cependant, il met enavant le fait qu'un tel actionnement est ine�cace. L'e�ort extérieur a pour seule conséquence dedéformer légèrement les modes supérieurs, alors que la plus grande partie de la déformation pourun mécanisme bistable est concentrée dans les deux premiers modes et vient de la compression.Aussi, un tel actionnement doit être évité.

100 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière (non si-gni�cative)
Répartition de l'énergieMode 1Modes 1&2Modes 1 à 3Modes 1 à 4 Non signi�catifModes 1 à 5Modes 1 à 6Modes 1 à 7
(c) table de répartition de l'énergie dansles modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 et a2 en fonc-tion du déplacement
(f) Con�gurations pour un moment réparti de 2,5 µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.14 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à100% de la poutre.

4.5 Modélisation avec un moment réparti interne 101
Les deux cas suivants, actionnements de 0 à 50% et de 0 à 50% puis 50% à 100% sont trèssemblables. Ce sont tous deux des actionnements mode 2, du fait de l'actionnement antisymé-trique. On obtient aussi une solution particulière antisymétrique. Les répartitions d'énergie sontde plus exactement identiques, mais cependant l'actionnement sur toute la longueur est plus e�-cace et abaisse le moment seuil presque de moitié. Les courbes sont classiques des actionnementsmode 2 et on obtient une courbe moment-déplacement en forme d'ellipsoïde.
Les deux cas suivants sont des actionnements mode 1. Le premier (changement de signe deMd à 25% et 75%) est intéressant, puisqu'il s'agit d'un mécanisme annoncé optimal dans lalittérature, avec un calcul simple. De fait, le résultat est bon, puisqu'on obtient un moment seuilde seulement 4 µNm/m, soit bien moins que les 6,5 µNm/m de l'actionnement précédent, maisaussi un peu moins que les 4,25µNm/m de l'actionnement avec changement de signe de Md
décalé à 20% et 80%. C'est un bon résultat quand on sait qu'il a été analysé avec des méthodesgéométriques basiques.
Le dernier cas que l'on présente brise la symétrie du mécanisme précédent (changement designe de Md à 25% et 50%). C'est ainsi un actionnement modes 1 et 2 combinés. Et il permetd'abaisser encore le moment seuil de basculement, on passe à un peu plus de 2µNm/m. Il est unpeu particulier cependant, puisqu'on ne transmet pas d'énergie dans les modes 3 et 7 (et tousmodes avec un mode 3 modulo 4). Ceci vient du fait qu'il reste malgré tout des symétries dansle montage (positions 50% et 25%).
On voit qu'on peut obtenir (en simulation pour le moment) mieux que les résultats publiésavec notre calcul d'optimisation. C'est d'ailleurs le dernier cas que l'on prendra comme point dedépart pour démarrer l'optimisation trois branches.

102 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 0%Modes 1&2 66,53%Modes 1 à 3 idemModes 1 à 4 77,71%Modes 1 à 5 idemModes 1 à 6 86,44%Modes 1 à 7 idem
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 2,5µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.15 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à50% de la poutre.

4.5 Modélisation avec un moment réparti interne 103
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 0%Modes 1&2 66,53%Modes 1 à 3 idemModes 1 à 4 77,71%Modes 1 à 5 idemModes 1 à 6 86,44%Modes 1 à 7 idem
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 2,5µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.16 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à50% et 50 à 100% de la poutre.

104 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 84,47%Modes 1&2 idemModes 1 à 3 idemModes 1 à 4 idemModes 1 à 5 93,84%Modes 1 à 6 idemModes 1 à 7 idem
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 2,5µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.17 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à25%, 25% à 75% et 75 à 100% de la poutre.

4.5 Modélisation avec un moment réparti interne 105
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 79,72%Modes 1&2 idemModes 1 à 3 87,34%Modes 1 à 4 idemModes 1 à 5 90,72%Modes 1 à 6 idemModes 1 à 7 95,70%
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 2,5µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.18 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à20%, 20% à 80% et 80 à 100% de la poutre.

106 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 30,35%Modes 1&2 71,49%Modes 1 à 3 idemModes 1 à 4 87,14%Modes 1 à 5 90,51%Modes 1 à 6 90,78%Modes 1 à 7 idem
(c) table de répartition de l'énergiedans les modes
(d) Crésultat suivantaractéris-tique Force normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 1µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.19 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à25%, 25% à 50% et 50 à 100% de la poutre.

4.6 Optimisation de l'actionnement réparti 107
4.6 Optimisation de l'actionnement réparti
Si on s'intéresse à la création d'un bistable actionné par EAP, on va pouvoir créer une ouplusieurs portions d'actionnements avec inversion du signe du moment réparti très simplementen créant une séparation sur la couche super�cielle du polymère. L'objet ici est de savoir oùréaliser cette inversion du signe du moment réparti. On veut en e�et prévoir de façon numériqueoù couper la couche super�cielle le polymère, pour réaliser directement une optimisation. C'estl'objet de cette partie, qui est de chercher un optimum par simulation. On développe un premiercas, le plus simple, avec deux parties d'actionnement, puis un second avec trois parties qui permetde se comparer aux travaux de Rossiter.
L'optimisation vise ici à minimiser le moment réparti maximum nécessaire au basculement.On utilisera la totalité de la longueur de la poutre, ce qui permet d'avoir une poutre homogène,et permet de mettre le maximum d'actionneur sur la poutre.
4.6.1 Optimisation de la position des actionneurs avec deux parties actives
On va chercher à optimiser un montage limité à deux parties actives. Ce type d'actionnementpermet d'obtenir di�érentes topologies, on a déjà observé des actionnements mode 2 pur et desactionnements combinés. Ce type de montage est plus simple à réaliser, il n'y a pas de partiecentrale mobile � libre �.
De même que précédemment, on va procéder par dichotomie, en faisant varier le paramètrede position de la séparation entre actionneurs, l1, comme montré en Fig. 4.20.
l1
Fig. 4.20 � Montage avec deux éléments ac-tifs, paramétrage pour l'optimisation.
En raison de la symétrie, on ne fait varier ce paramètre que de 0 à l/2. On représente enFig. 4.22 di�érentes courbes Md-d issues de ces calculs. On a cherché d'abord par intervalles de5%, puis en intercalant des courbes pour les positions qui semblaient intéressantes.
On voit que l'optimum est incertain. En fait, on a deux optima, un premier entre 15 et 20%,le second vers 40%. Ce dernier est un peu moins bon mais cependant donne des branches delongueurs plus proches. C'est ce dernier qui retiendra donc notre attention. La robustesse de laposition de changement de signe est très bonne et on peut se permettre des erreurs de montageconséquentes (5% d'erreur sur l1 est acceptable !).
On notera un actionnement mode 1 en l1 = 0,30 l. L'actionnement mode 2 est obtenu pourl1 =0,50 l. Bien que nous ayons testé toute une gamme de positions sur la demi-longueur, on nes'éloigne pas franchement des 4µNm/m, ce qui est d'ores et déjà moins bon que l'actionnement3 branches.
Finalement, on retient donc comme optimum (l1 = 0,40 l). C'est le cas que nous étudions. Lerésultat complet de la simulation est donné en Fig. 4.23.
4.6.2 Optimisation de la position des actionneurs avec trois parties actives
On va ensuite chercher à optimiser la position des actionneurs dans le cas d'un actionnementen 3 parties actives. Ce type d'actionnement permet comme on l'a vu d'obtenir au moins desactionnements en mode 1 pur et des actionnements combinés.

108 Actionnement à base de moment
Deux paramètres vont apparaître. Ce sont les extrémités des actionneurs, respectivement l1et l2, comme montré en Fig. 4.21.
l1 l2
Fig. 4.21 � Montage avec trois éléments ac-tifs, paramétrage pour l'optimisation.
La réponse du système étant complexe, il semble di�cile de faire une optimisation directe. Onva donc procéder par une méthode d'exploration de l'espace des paramètres l1 et l2, en modi�antsuccessivement l'un et l'autre de ces paramètres. On présente en Fig. 4.24 di�érentes courbesMd-d issues de ces calculs.
Finalement, on trouve un optimum pour
(l1 = 0,20; l2 = 0,60) (4.14)
(et par symétrie (l1 =0,40; l2 =0,80)). Cette valeur est bien sur assez imprécise mais est bonne àquelques pourcents de la longueur près. Le résultat complet de la simulation correspondante estdonné en Fig. 4.25.
Un autre point est de regarder la robustesse de ces paramètres envers le moment de bas-culement. On voit en Fig. 4.24 que lorsqu'on fait varier les paramètres autour de l'optimum,la valeur du couple de basculement est très peu modi�ée. En conséquence on pourra tolérer unmontage réel pas trop précis.
On obtient cette fois-ci un optimum qui présente un moment seuil de basculement de 1,8µNm/m,ce qui est près de la moitié de celle du mécanisme deux branches. C'est un progrès considérable.Cependant, nous avons peu amélioré notre solution par rapport au montage avec (l1 = 0,25; l2 = 0,50).
4.6.3 Impact de la largeur des séparations
Un dernier point est la largeur des coupures. Dans un montage théorique, on peut sur unelargeur nulle passer d'un actionnement dans un sens à un actionnement dans l'autre. En réalité,ceci nécessite une petite bande inactive. On a aussi simulé les cas retenus précédemment en deuxet trois branches, puis retiré l'actionnement sur 4% de la longueur, en retirant 2% d'actionnementde chaque coté. Les courbes résultantes sont données en Fig. 4.26, avec un premier actionnement2 branches et des portions actionnées de 0 à 38% puis 42% à 100%, et un second en 3 branchesavec des portions de 0 à 18%, 22 à 58% puis en�n 62% à 100%.
On notera qu'il n'y a presque pas de di�érence. On pourra donc considérer que l'impact dela coupure sur les performances est pratiquement nul, et par conséquent la négliger.
4.6.4 Discussion
Dans les deux cas, on trouve des optimaux qui obéissent à la topologie modes 1 et 2 combinés.De ce fait, il n'est pas possible de trouver un optimum à la main. On doit calculer l'intégralité descourbes e�orts-déplacement pour en déduire l'e�ort seuil de basculement, qui est la valeur que l'onveut minimiser. On en déduit ensuite par exemple la position des coupures, ce qui nous permetde réaliser le mécanisme. Ceci nous permet de nous dispenser d'une recherche complètementexpérimentale.
On voit que les optimaux permettent une meilleure performance à coût nul, puisqu'il s'agitici simplement de déplacer la position des coupures. Cependant, et c'est une déception de ces

4.6 Optimisation de l'actionnement réparti 109
(a) Montage pour l1 = 0,00 l (b) Montage pour l1 = 0,05 l (c) Montage pour l1 = 0,10 l
(d) Montage pour l1 = 0,12 l (e) Montage pour l1 = 0,15 l (f) Montage pour l1 = 0,17 l
(g) Montage pour l1 = 0,20 l (h) Montage pour l1 = 0,22 l (i) Montage pour l1 = 0,25 l
(j) Montage pour l1 = 0,30 l (k) Montage pour l1 = 0,35 l (l) Montage pour l1 = 0,37 l
(m) Montage pour l1 = 0,39 l (n) Montage pour l1 = 0,40 l (o) Montage pour l1 = 0,41 l
(p) Montage pour l1 = 0,43 l (q) Montage pour l1 = 0,45 l (r) Montage pour l1 = 0,50 l
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.22 � Optimisation du montage avec 2 parties d'actionnement. On obtient par dichotomieune solution optimale.

110 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière pourMd = 1Nm/m
Répartition de l'énergieMode 1 27,99%Modes 1&2 57,30%Modes 1 à 3 75,62%Modes 1 à 4 75,76%Modes 1 à 5 83,90%Modes 1 à 6 85,47%Modes 1 à 7 87,22%
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 2,5µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.23 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à40% et 40 à 100% de la poutre

4.6 Optimisation de l'actionnement réparti 111
(a) l1 = 0,25, l2 = 0,50 (b) l1 = 0,25, l2 = 0,40 (c) l1 = 0,25, l2 = 0,60
(d) l1 = 0,25, l2 = 0,70 (e) l1 = 0,25, l2 = 0,80 (f) l1 = 0,25, l2 = 0,90
(g) l1 = 0,40, l2 = 0,60 (h) l1 = 0,30, l2 = 0,60 (i) l1 = 0,20, l2 = 0,60
(j) l1 = 0,15, l2 = 0,60 (k) l1 = 0,20, l2 = 0,55 (l) l1 = 0,20, l2 = 0,65
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.24 � Optimisation du montage avec 3 parties d'actionnement. On obtient �nalement unesolution optimale. Pour ce cas, on a mises les �gures dans l'ordre de recherche, pour donner uneidée du processus de recherche d'optimum.
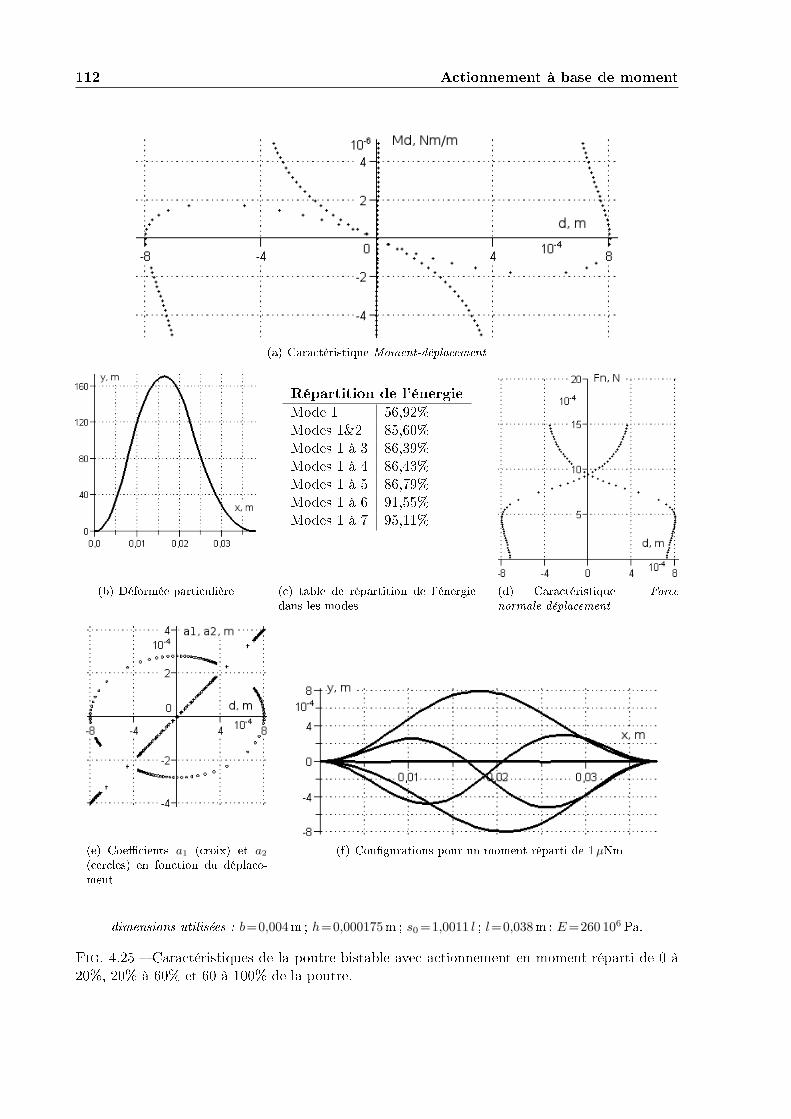
112 Actionnement à base de moment
(a) Caractéristique Moment-déplacement
(b) Déformée particulière
Répartition de l'énergieMode 1 56,92%Modes 1&2 85,60%Modes 1 à 3 86,39%Modes 1 à 4 86,43%Modes 1 à 5 86,79%Modes 1 à 6 91,55%Modes 1 à 7 95,11%
(c) table de répartition de l'énergiedans les modes
(d) Caractéristique Force
normale-déplacement
(e) Coe�cients a1 (croix) et a2
(cercles) en fonction du déplace-ment
(f) Con�gurations pour un moment réparti de 1µNm
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.25 � Caractéristiques de la poutre bistable avec actionnement en moment réparti de 0 à20%, 20% à 60% et 60 à 100% de la poutre.

4.7 Conclusion sur le modèle 113
(a) 2 branches, l1 = 0,40, coupure 4% (b) 3 branches, l1 = 0,20, l2 = 0,60, coupure 4%
dimensions utilisées : b=0,004m ; h=0,000175m ; s0 =1,0011 l ; l=0,038m ; E =260 106 Pa.
Fig. 4.26 � Courbes moment-déplacement pour les cas optimaux retenus et une largeur non-actionnée de 4% (coupure)
modèles, les optimisations réalisées ne sont pas spectaculaires. On a gagné environ 10% en méca-nisme trois branches par rapport au mécanisme avec coupures à 25% et 50%, dont les dimensionsont été prises plus ou moins au hasard. Par contre, on montre que le mécanisme est robuste parrapport à une imperfection de position de la coupure.
On obtient avec trois branches un bien meilleur résultat qu'avec deux. Cependant, le méca-nisme trois portions est bien plus di�cile à réaliser que le mécanisme deux branches, pour desquestions d'alimentation électrique.
4.7 Conclusion sur le modèle
Nous montrons dans ce chapitre la résolution pour un actionnement par moment externe.Ceci nous a permis de présenter de nombreux exemples d'actionnement, des actionnements � pé-dagogiques � avec un seul couple tout d'abord, mais aussi de préparer un montage expérimentalen matériau actif, avec deux couples.
Nous avons également mené des calculs pour un actionnement interne, via une méthode derésolution en 3 étapes. Ceci est plus proche du comportement intrinsèque des matériaux actifs,nous le montrons ici en envisageant des EAP ou des MFC.
Nous avons voulu optimiser la position des actionneurs. Notamment pour un actionnementréparti, on doit optimiser la position de la coupure, qui permet de changer le signe du momentréparti. Cette fabrication très simple nécessite malgré tout un calcul préalable pour optimiser lesdi�érents paramètres.
Le chapitre 4 détaille les bancs de test réalisé à la suite de ces calculs théoriques. On noteraqu'on ne peut pas parler réellement de véri�cation expérimentale. En e�et, les MFC et les EAPprésentent de l'hystérésis, et il n'est pas possible de réaliser un véritable banc de test commeon l'a fait pour le montage en force. C'est aussi pour cela que nous avons a découpé les partiesthéorique et expérimentale dans ce cas. Il resterait à se poser la question de comment réaliserun véritable banc de test avec un capteur de couple précis, mais au vu des hypothèses et desdimensions, il n'y a pas à ma connaissance de solution convainquante qui existe.

114 Actionnement à base de moment
4.8 Principe d'actionnement avec des MFC
On présente à présent un cas d'utilisation d'actionneur à matériau actif, le MFC. Celui-cicrée un moment linéaire le long de la structure. Le principe du montage est montré en Fig. 4.27.
l0
lprécompression
dép
lacem
en
t y
xFN
MFC
Fig. 4.27 � Mécanisme bistable actionné par MFC, avec son actionneur collé sur une des facesde la poutre. Ceci autorise le pilotage du basculement d'une position stable vers l'autre.
La Fig. 4.28 montre de quelle façon ou utilise le MFC, actionneur linéaire, pour créer uncouple dans la structure. En créant un déplacement de la surface, avec une extension d'un cotéet une contraction de l'autre, on va créer un couple (au sens original de couple de force) autourde la ligne moyenne de la poutre.
extension
contraction
Couple équivalent
Fig. 4.28 � Modèle de couple équivalent théorique pour un couple de force appliquée sur lasurface. Le meilleur moyen est d'utiliser deux actionneurs sur chaque face de la poutre, la notionde couple prenant alors son sens premier.
Cependant, comme le MFC est collé à la structure d'un seul coté (tel que représenté enFig. 4.29), le système réel sera assez di�érent et un déplacement de la ligne neutre apparaît.De plus, certains paramètres sont inconnus, tel l'épaisseur du �lm de colle et la position exactede l'actionneur, celui-ci étant entouré d'une couche de protection. En plus de tout ceci, on aune variation assez conséquente du moment quadratique global de la poutre à l'endroit où setrouve l'actionneur. Il est également di�cile de comprendre le comportement de la colle, qui va se

4.9 Modes de déformations et optimisation de la position 115
déformer vu les niveaux de contrainte et de déformation, et celui de l'actionneur, le constructeurne donnant que les courbes à vide du MFC, par ailleurs hystérétques. Tout ceci rend di�cile defaire correspondre un modèle comme celui développé précédemment en section 4.5 avec un telmontage. C'est un point que l'on discutera par la suite.
extension
moment équivalent?
film de colle
zone active
MFC encapsulé
ligne neutre modifiée
Fig. 4.29 � Modèle de couple équivalent réellement créé par le MFC. Plusieurs di�érences appa-raissent, notamment un déplacement de la ligne moyenne.
L'idée suivie par la suite est de créer un moment réparti sur une zone réduite (comme enFig. 4.30), celle couverte par l'actionneur, moins longue que la poutre. On va ensuite observerexpérimentalement la réponse du système à l'actionnement.
actionnement
Fig. 4.30 � Actionnement d'une poutre bistable par MFC. Un moment réparti est crée le longde la structure pour pouvoir la faire basculer.
4.9 Modes de déformations et optimisation de la position
On rappelle que le basculement d'un mécanisme bistable est guidé par deux déformationstopologiques, celle du mode 1 et celle du mode 2. Un actionnement optimal serait capable dedéformer le système en prenant en compte cette topologie. Si la poutre est homogène, les deuxmodes entrent en jeu. Toute la question est de savoir comment l'actionneur arrive à déformer lapoutre en respectant ces modes de déformation.
Dans une analyse purement théorique, il serait intéressant de pouvoir répartir l'énergie d'ac-tionnement entre le premier et le second mode pour une optimisation �ne. On rappelle que lesmodes n'ont pas le même impact, le mode 1 servant à assurer la bistabilité lorsque le mode 2lui sert à aider le basculement. Comme la forme de la poutre change pendant le basculement,on voudrait pouvoir apporter l'énergie dans chaque mode à tout instant dans une proportionoptimale. Cependant, ce n'est en pratique pas possible et on doit se contenter de modi�er la

116 Actionnement à base de moment
position de l'actionneur en regardant quelle proportion d'énergie est alors donnée dans chaquemode.
Cependant, une modélisation ou un test expérimental peut nous donner la position optimale,au sens de celle qui donnera sur l'ensemble de la course (et non pas sur un point donné) lameilleure position d'actionnement. On montre dans ce chapitre des cas où l'actionnement estpurement mode 1 (position symétrique de l'actionneur, en l'occurrence centrée) et des positionsqui excitent les modes 1 et 2. On trouve alors plusieurs optima locaux.
4.10 Montage expérimental pour les MFC
4.10.1 Banc de test
Le banc de test est représenté en Fig. 4.31. La partie mécanique est sur la droite, �xée surune table à trous Thorlabs. Le module haute tension est au centre. A gauche, il y a l'oscilloscope(en haut) et l'alimentation stabilisée (en bas), qui alimente le module haute tension. La consoleVishay au milieu de la colonne d'instruments de mesure n'est pas utilisée dans ce montage, elleservait pour la mesure des forces pour le banc de test en force.
Fig. 4.31 � Le banc de test, avec l'alimentation (en bas à gauche), l'oscilloscope (en haut àgauche), la carte de contrôle (devant), le module haute tension (au centre) et le banc mécanique(à droite).
La source de haute tension utilisée lors des tests est un module haute tension de PhysicalInstruments [29]. Il est alimenté par une entrée 24V, et peut fournir en sortie une tension allantjusqu'à 2 kV et débiter 6mA (3mA sous 1 kV), des niveaux dangereux. Plusieurs protections sont

4.10 Montage expérimental pour les MFC 117
présentes. Une protection dite � hardware �permet de limiter tension et courant. On rappelle aussique sous les 1mA, aucune tension ne devrait être dangereuse pour un être humain. Ensuite, deslimites de courant et tension peuvent être dé�nies par la carte de contrôle, ainsi qu'une fonctioninhibit. Nous avons réalisé la carte de telle sorte que l'inhibit est inactif lorsqu'on appuie surle bouton de la carte et les limites de tension et de courant mises à leur niveau d'usage. Parcontre, dès que l'on relâche le bouton, l'inhibit est activé et en plus les limites de courant etde tension sont mises simultanément à zéro, constituant une double protection. Le module nousfournit également des sorties de monitoring.
L'actionneur utilisé pour les tests �naux est un M2814P1MFC de Smart Materials [36].Il fait 46mm de long pour 25mm de large. Sa partie active est restreinte à un rectangle de28mmx14mm. La poutre sur laquelle il est collé fait 90mm de long pour 16mm de large, eta une épaisseur de 0,15mm. La position de l'actionneur, telle qu'indiqué dans les tableaux ci-dessous, utilise le bord de l'actionneur. Aussi pour avoir la position du début de la partie activeil faut ajouter 3mm à toutes les valeurs données.
Il est possible de coller complètement le MFC à la poutre. Cependant, comme indiqué enFig. 4.32, le MFC forme une bosse en dessous (et en dessus) de la partie active qui permetégalement de ne coller que la zone en dessous de cette partie active. Ceci permet, en comparaisondu montage tout-collé, d'obtenir de meilleurs résultats pour le même actionneur, puisque collerles parties inactives (zone de protection, bords et de câblage) augmente la rigidité de la poutre,ce qui augmente fortement les besoins en énergie de la part du MFC. On préférera alors ne collerque la partie active, ce qui est le montage optimal.
Fig. 4.32 � Le MFC vu de coté. On peut coller le MFC sur sa seule partie active. L'épaisseurest exagéré dans ce schéma.
On notera également que le chronographe de la Fig. 4.35 utilise un MFC collé sur toute salongueur, que nous avons utilisé lors de tests préliminaires. Les MFC sont collés avec une collecyanoacrylate de 3M. Il serait possible également de couper les bords du MFC dans la partie quine sert qu'à la protection. On ne peut par contre par découper la partie du bout, qui contient lecâblage.
Lors de nos tests, la tension chutait immédiatement après le basculement. Ceci est dû àla réversibilité du MFC. Lors du basculement, le MFC va brusquement restituer de l'énergieau module haute tension, car la poutre devient motrice et il converti l'énergie mécanique entension et courant. Ceci crée un saut de tension dans le module haute tension, détecté parla sécurité interne qui coupe alors immédiatement le module. La tension chute par déchargedes condensateurs. Ceci nous a aidé à déterminer la tension de basculement, puisque c'est latension juste avant la coupure de l'alimentation, soit aussi la tension maximale enregistrée parl'oscilloscope. Le pic de tension n'apparaît pas sur notre oscilloscope, qui est �ltré.
Alors que les photos de la Fig. 4.31 montrent un montage préliminaire vertical, on est passéà un montage horizontal pour les tests �naux. Ceci permet d'avoir une meilleure vision de la

118 Actionnement à base de moment
déformation (comme en Fig. 4.35) au cours de l'actionnement.
4.10.2 Principe des tests
zone MFC active & de collage
actionneur MFC
longueur
position
soudurefilm de protection
Fig. 4.33 � Principe du banc de test. On a utilisé un MFC collé sur une poutre en acier inoxydable,qu'on va précompresser de quelques pourcents de sa longueur pour la rendre bistable. Ensuite,on détermine la tension qui la fait basculer.
Deux séries de tests ont été faites. La première consiste à déterminer la meilleure position pourl'actionneur le long de la poutre. Pour trois niveaux de précompression (0,05, 0,08 et 0,1mm),nous avons mesuré la tension de basculement, ce pour di�érentes positions de l'actionneur, commereprésenté en Fig. 4.33. Les résultats ont été collectés dans le tableau 4.36.
La seconde série de test consiste à accroître la précompression peu à peu, jusqu'au momentoù le système n'est plus capable de basculer. Comme montré en Fig. 4.34, ceci permet d'obtenirune course plus longue pour le système. Nous avons reproduit ce test pour plusieurs positions del'actionneur (centré, 18, 20, 22 et 24mm). Les résultats sont donnés dans le tableau 4.38.

4.10 Montage expérimental pour les MFC 119
Précompression
Déplacement résultant
Fig. 4.34 � Principe de la deuxième série de mesures. La compression est augmentée peu àpeu. Le déplacement à vide augmente, ainsi que la force de basculement nécessaire pour le fairebasculer. Les dimensions verticales sont fortement agrandies.
4.10.3 Chronologie de basculement
En Fig. 4.35, nous donnons la chronologie de déformation de la structure sous une tensioncroissante. On notera que les dimensions de ce mécanisme ne sont pas celles reportées ici, maiscelle d'un test précédent d'environ 10 cm de long, qui permettait plus de déformation et donc aun meilleur rendu photographique. Dans ce cas, la totalité du MFC est collée, y compris le �lmde protection périphérique, au contraire de la Fig. 4.32. Le système bascule entre la troisième etla quatrième photographie.
On voit que la déformation de la poutre est grossièrement une combinaison des modes de�ambement 1 et 2. Ceci permet à la poutre d'avoir un chemin mécanique lui permettant debasculer d'une position à l'autre, en utilisant le mode 2 comme moyen pour limiter son éner-gie. Cependant, les irrégularités de moment quadratique le long de la poutre induisent que lesdéformations ne suivent pas bien le modèle avec modes de �ambement.
4.10.4 Principe des tests expérimentaux pour optimiser la position de l'ac-tionneur
Après une première série de tests préliminaires, que nous avons présentés dans une commu-nication à l'IROS 08 [11] et les chronographes de la Fig. 4.35, nous avons voulu procéder à destests d'optimisation de la position et sur la base de celui-ci pousser le système à ses limites.
Pour la première série de tests, nous avons pris di�érentes positions pour l'actionneur, entrele bord (0mm) et la position centrée (28mm). Comme le �lm de protection empêche de se mettrecomplètement sur le bord, ceci signi�e en fait qu'on commence à 3mm du bord. Pour chaquetest, plusieurs basculements ont été réalisés et on donne dans le tableau 4.36 une valeur moyenne,le plus souvent sur trois valeurs. Nous indiquons aussi si le mécanisme n'a pas pu basculer avec latension maximum (1 500V). La déviation observée dans les valeurs était généralement très faible(moins de 1% dans le meilleur cas, ce qui est du niveau de la précision de l'appareillage), maisnous avons pu parfois observer beaucoup plus (jusqu'à 10%). Un autre point à noter est que laprécompression est réellement faible, de l'ordre de 5µm, ce qui peut être obtenu en déplacementrelatif avec une table Thorlabs mais aussi très probablement par un léger déplacement durantl'assemblage (notamment le vissage). Pour chaque valeur, nous avons assemblé le système unefois, et fait trois tests pour améliorer la précision des résultats.
Un dernier point est que le MFC lui-même présente une hystérésis. Ceci fait qu'il n'est paspossible d'utiliser la tension appliquée comme une image exacte de l'actionnement réparti e�ectif.Cependant, on peut en tirer une tendance générale.
Dans le tableau 4.36 et en Fig. 4.37, on voit que les positions d'actionnement périphériques
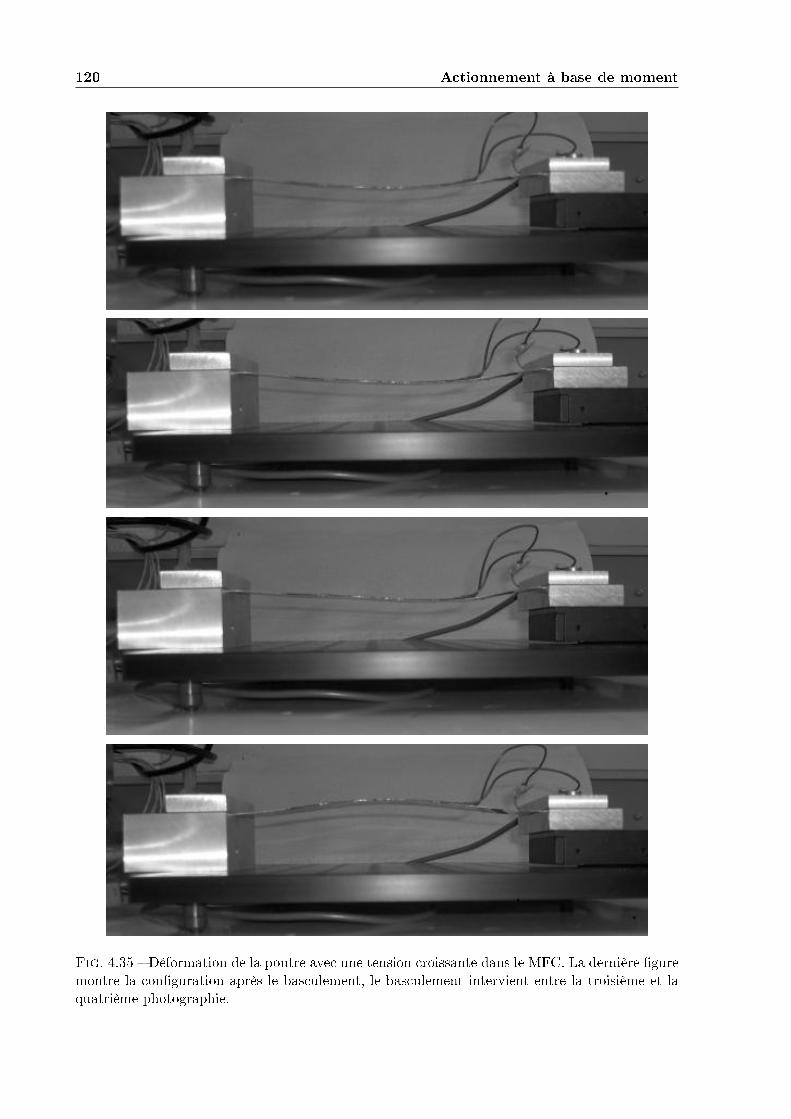
120 Actionnement à base de moment
Fig. 4.35 � Déformation de la poutre avec une tension croissante dans le MFC. La dernière �guremontre la con�guration après le basculement, le basculement intervient entre la troisième et laquatrième photographie.
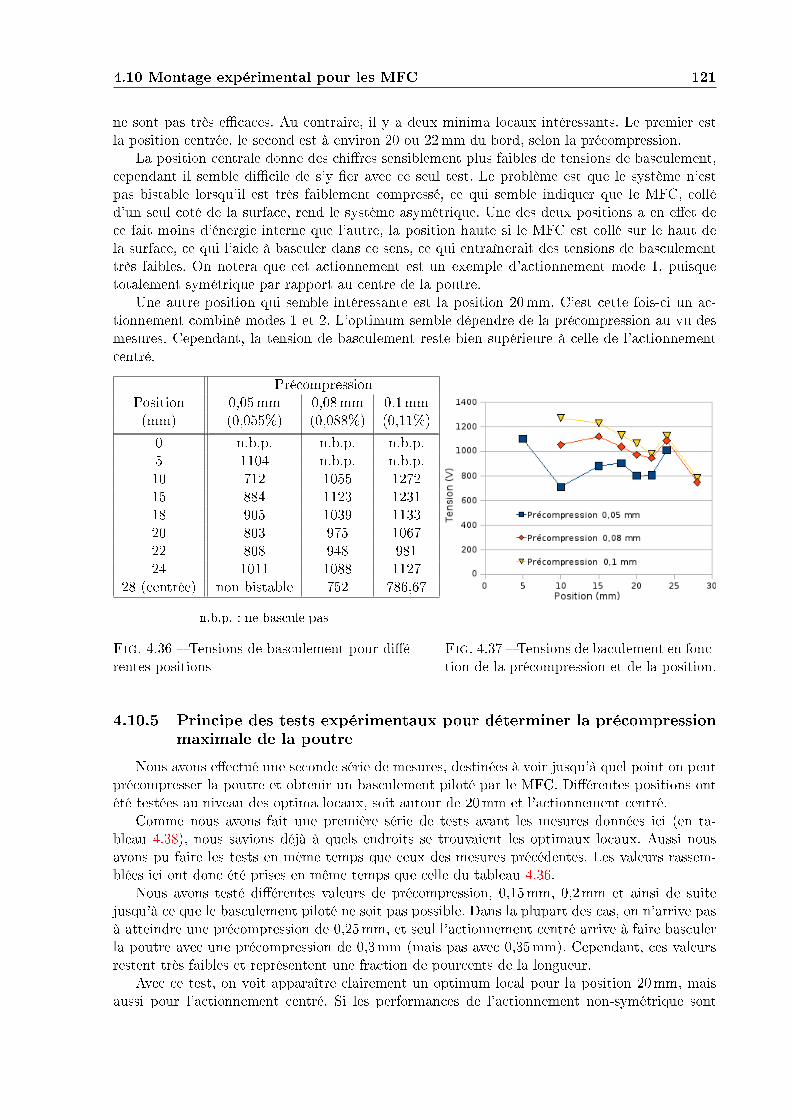
4.10 Montage expérimental pour les MFC 121
ne sont pas très e�caces. Au contraire, il y a deux minima locaux intéressants. Le premier estla position centrée, le second est à environ 20 ou 22mm du bord, selon la précompression.
La position centrale donne des chi�res sensiblement plus faibles de tensions de basculement,cependant il semble di�cile de s'y �er avec ce seul test. Le problème est que le système n'estpas bistable lorsqu'il est très faiblement compressé, ce qui semble indiquer que le MFC, colléd'un seul coté de la surface, rend le système asymétrique. Une des deux positions a en e�et dece fait moins d'énergie interne que l'autre, la position haute si le MFC est collé sur le haut dela surface, ce qui l'aide à basculer dans ce sens, ce qui entraînerait des tensions de basculementtrès faibles. On notera que cet actionnement est un exemple d'actionnement mode 1, puisquetotalement symétrique par rapport au centre de la poutre.
Une autre position qui semble intéressante est la position 20mm. C'est cette fois-ci un ac-tionnement combiné modes 1 et 2. L'optimum semble dépendre de la précompression au vu desmesures. Cependant, la tension de basculement reste bien supérieure à celle de l'actionnementcentré.
PrécompressionPosition 0,05mm 0,08mm 0,1mm(mm) (0,055%) (0,088%) (0,11%)
0 n.b.p. n.b.p. n.b.p.5 1104 n.b.p. n.b.p.10 712 1055 127215 884 1123 123118 905 1039 113320 803 975 106722 808 948 98124 1011 1088 1127
28 (centrée) non bistable 752 786,67
n.b.p. : ne bascule pas
Fig. 4.36 � Tensions de basculement pour di�é-rentes positions
Fig. 4.37 � Tensions de baculement en fonc-tion de la précompression et de la position.
4.10.5 Principe des tests expérimentaux pour déterminer la précompressionmaximale de la poutre
Nous avons e�ectué une seconde série de mesures, destinées à voir jusqu'à quel point on peutprécompresser la poutre et obtenir un basculement piloté par le MFC. Di�érentes positions ontété testées au niveau des optima locaux, soit autour de 20mm et l'actionnement centré.
Comme nous avons fait une première série de tests avant les mesures données ici (en ta-bleau 4.38), nous savions déjà à quels endroits se trouvaient les optimaux locaux. Aussi nousavons pu faire les tests en même temps que ceux des mesures précédentes. Les valeurs rassem-blées ici ont donc été prises en même temps que celle du tableau 4.36.
Nous avons testé di�érentes valeurs de précompression, 0,15mm, 0,2mm et ainsi de suitejusqu'à ce que le basculement piloté ne soit pas possible. Dans la plupart des cas, on n'arrive pasà atteindre une précompression de 0,25mm, et seul l'actionnement centré arrive à faire basculerla poutre avec une précompression de 0,3mm (mais pas avec 0,35mm). Cependant, ces valeursrestent très faibles et représentent une fraction de pourcents de la longueur.
Avec ce test, on voit apparaître clairement un optimum local pour la position 20mm, maisaussi pour l'actionnement centré. Si les performances de l'actionnement non-symétrique sont

122 Actionnement à base de moment
PrécompressionPosition 0,15mm 0,2mm 0,25mm 0,3mm(mm) (0,167%) (0,222%) (0,277%) (0,333%)
18 1408 n.b.p.20 1291 1464 n.b.p.22 1212 1355 n.b.p.24 1256 1392 n.b.p.
28 (centrée) 919 1071 1211 1362
n.b.p. : ne bascule pas
Fig. 4.38 � Tensions de basculement pour di�érentes valeurs de précompression
clairement en retrait par rapport à celles de l'actionnement centré, le problème de non-symétrieest toujours présent, et on ne saurait faire de choix trop hâtif sur l'une ou l'autre solution.
De plus, plus on a de précompression, moins les imperfections d'assemblage vont jouer. Cesdernières valeurs sont donc moins dépendantes d'imperfections éventuelles que les précédentes.
4.10.6 Actionnement double-sens
Nous avons aussi fait des tests avec un montage double sens, le montage précédent n'étantpas double-sens à cause de l'incapacité du MFC à se contracter su�samment pour faire revenirla poutre dans son état initial. En e�et, les MFC n'acceptent que -500V de tension négative, en-traînant une compression moindre que l'extension qui accepte une tension de pilotage de 1 500V,au contraire d'un piézoélectrique classique [23]. Un montage double-sens évite de devoir recourirà un système externe pour faire revenir le mécanisme bistable dans sa con�guration d'origine.La poutre et les actionneurs utilisés sont exactement les mêmes que précédemment.
(a) test 1
(b) test 2
Fig. 4.39 � Deux tests pour un actionnement double-sens, utilisant les extrema locaux. Tousdeux ne basculent pas.
Nous avons réalisé les montages schématisés en Fig. 4.39. Dans le premier cas, les actionneurssont collés centrés, un sur chaque face de la poutre (comme montré en Fig. 4.39(a)). Cependant,ceci implique que le centre de la poutre, où se trouvent les actionneurs, devient très rigide. Defait, alors, le système n'arrive plus à basculer dans aucun sens.
Comme nous avons un autre optimum local, nous avons essayé avec un montage comme en

4.11 Discussion 123
Fig. 4.39(b). Les deux actionneurs étaient collés à 20mm de leurs bords respectifs, chacun surune des faces pour permettre un basculement chacun dans sa direction. Cette conception permetde ne pas créer de trop importante rigidité locale. Cependant, dans ce cas aussi, le systèmen'arrive plus à basculer dans aucune direction, montrant que les actionneurs sont très limités enterme d'énergie volumique et n'arrivent pas à gérer une quelconque augmentation de la rigidité.
4.11 Discussion
On notera tout d'abord que le courant d'actionnement est très faible. Nous n'avons paspu le mesurer avec la fonction de surveillance du module haute tension. Ceci signi�e que cecourant est plusieurs ordres de grandeur plus faible que le courant nominal du module, soit bienen deçà des 1mA (le courant nominal est de 6mA). Aussi, cette alimentation est fortementsurdimensionnée pour cette application. C'est un bon point pour la consommation électrique,puisque ceci signi�e que le système a de très faibles besoins en puissance. De plus, c'est aussi untrès bon point pour la sécurité, puisqu'on est en dessous des 1mA, la limite de dangerosité descourants indépendamment de la tension. Ainsi, ce montage ne devrait pas être dangereux pourl'utilisateur une fois bien dé�nie la limite de courant hardware.
Un autre point est que peu de courant signi�e peu de puissance mécanique. La compressionmaximum admissible s'est révélée décevante. On est très limités en terme d'énergie disponible.L'intérêt d'un tel système reste le coté ultra-plat de l'actionnement et du système complet (l'épais-seur est en dessous de 0,5mm). De plus longs actionneurs, qui utilisent une plus grande partie dela poutre (tel que notre montage préliminaire de la Fig. 4.35) donnent plus d'énergie volumique,mais les phénomènes de �ambement local sont plus présents aux bords des actionneurs, ce quicomplique la modélisation et réduit la durée de vie en créant de la fatigue prématurée.
Nous avons constaté que l'actionnement le plus e�cace est obtenu pour un actionneur centré(symétrique). Cependant, un autre optimum local existe, légèrement décalé par rapport à lasolution centrée dans ce montage. Par contre, on a besoin d'une recherche d'optimum pour chaquemontage, puisqu'on voit que le comportement avec deux actionneurs est largement modi�é parl'ajout d'un second actionneur. Notre conseil pour trouver rapidement un bon positionnementde l'actionneur, expérimentalement, est d'utiliser en premier lieu la position symétrique, puis dedéplacer l'actionneur autour de cette position. Ceci devrait permettre de ne pas tester trop depositions.
On notera que si on a utilisé ici un actionneur collé sur la surface, on peut utiliser un montageavec une poutre �échissante dont l'actionnement serait modélisé comme provenant de momentsexternes telle celle qu'on a utilisé pour le montage AMF. Ceci évite de se retrouver bloqué parle besoin d'optimiser avec les deux modes de �ambements topologiques (qui sont orthogonaux).Dans ce cas, la meilleure position d'actionnement sera certainement à environ 35% de la longueurde la poutre (cf. le chapitre 3). Cependant, on perd alors le principal avantage de la conceptionactuelle, le montage n'étant plus aussi plat.
Pour revenir au phénomène de �ambement local, on peut noter que si on a de tels phénomèneson peut s'interroger sur la validité du modèle employé, puisqu'on emploie un modèle basé sur lesmodes de �ambement, ce qui suppose une parfaite régularité de la rigidité de la poutre selon salongueur. Un modèle pseudo-rigide serait plus adapté. On montre en Fig. 4.40 comment on peuttransformer le système en un problème de blocs pseudo-rigides. En e�et, la zone d'actionnement,relativement très rigide du fait de la présence de matériau piézoélectrique (une conclusion parta-gée avec [24]) serait modélisée indépendamment, comme une partie libre. On peut alors intégrerl'action de l'actionnement comme équivalente à une action sur poutre libre. On ajoute ensuitedes poutres intermédiaires, beaucoup plus souples, entre les points d'accroche.
Il ne s'agit pas ici de développer un modèle spéci�que. Cette partie sert à évaluer les MFC en

124 Actionnement à base de moment
(a) comportement obtenu
(b) modèle pseudo-rigide
Fig. 4.40 � Modèle pseudo-rigide pour un actionnement à base de MFC. Ce type de modèlesemble plus indiqué du fait du changement de rigidité en �exion de la zone actionnante.
se basant sur le modèle présenté précédemment en chapitre 4. Cependant, on notera qu'on n'apas de bonne justi�cation pour utiliser un modèle modal par rapport à un modèle pseudo-rigideadapté, qui permettrait de modéliser la zone rigide séparément (modèle poutre analytique libre)puis les branches. Ceci fait douter de la bonne pertinence de notre modèle dans le cas présent.
4.12 Conclusion sur les tests MFC
Dans ce chapitre, nous avons présenté une étude sur l'utilisation d'un MFC a�n d'actionnerun mécanisme bistable. On obtient un mécanisme incroyablement plat et peu consommateurd'énergie. Revers de la médaille, l'énergie apportée est faible.
Les MFC, bien qu'étant aussi des actionneurs de type matériaux actifs présentent certainesparticularités, notamment en terme de montage. On a abordé plusieurs points ici.
Le collage est un de ces points particuliers. En e�et, nous utilisons un montage similaire aumécanismes monolithiques. L'actionneur doit alors être capable de suivre les déformations dela structure. Nous expliquons qu'il est préférable de ne coller que la partie active plutôt que lastructure complète, pour éviter d'introduire une rigidité locale inutile.
L'in�uence de la position d'actionnement est étudiée et discutée. Même si la précision denos montages semble problématique, plusieurs optima apparaissent dans notre montage dont laposition centrée et une position légèrement décalée.
De plus, les niveaux de courant apparaissent su�samment faibles pour autoriser une exploi-tation non-dangereuse. Ceci autoriserait de tels montages au contact des humains, par exempleau contact de la peau pour des peaux arti�cielles ou des tissus actifs.
On notera aussi que dans ce cas, la poutre bistable n'est pas bien modélisée du fait desvariations de rigidité induite par la présence du MFC.
Un autre point est que le MFC est réversible. Ceci fait qu'il se comporte comme un actionneuret un générateur d'énergie. Nous utilisons d'ailleurs cette dernière propriété pour détecter lebasculement, dévoilé par un pic de tension.

4.12 Conclusion sur les tests MFC 125
En�n, comme l'actionneur n'est pas double-sens, nous avons fait un test avec un montagedi�érent qui aurait permis d'apporter cette propriété manquante. Cependant, avec ce montage,on apporte une rigidité supplémentaire, su�samment pour que le système n'arrive plus à bascu-ler.Par ailleurs, ce type d'actionneur est rapide, puisque basé sur une technologie piézoélectrique.

126 Actionnement à base de moment

Chapitre 5
Étude dynamique
Dans ce chapitre, nous nous proposons d'étudier expérimentalement la mécanique du bascule-ment, en utilisant l'exemple de l'actionnement par force normale. Une première question derrièretout ceci est : � comment est-ce que ça bascule ? �. Les simulations précédentes permettent deprédire le fonctionnement quasi-statique, mais ne donnent pas d'information sur la dynamiquedu système. Nous voulons comprendre ce qui se passe lors du saut de branche, alors que nous neconnaissons avec l'étude statique que le point de départ et le point d'arrivée.
Une autre question qui sous-tend tout ceci est le dimensionnement, notamment pour évitertoute plasti�cation. Lors de tests sur l'actionnement en force, nous nous sommes rendus compteque le montage du bistable pouvait ne pas entraîner de plasti�cation, alors que son basculementplasti�ait la structure. Ceci paraît simple à expliquer. Lors du basculement, le mode 2 est uti-lisé, ce qui entraîne des pics de déformation locale plus importants que le mode 1. Cependant,étrangement, il nous est aussi arrivé le cas où l'actionnement décalé semble dégrader plus vite lastructure et la plasti�er que l'actionnement central, ce qui ne peut pas s'expliquer par un modede déformation di�érent, la topologie restant la même. C'est à toutes ces questions que s'e�orcede répondre ce chapitre.
5.1 Hystérésis et saut de branche
Nous avons vu dans le chapitre 2 que les caractéristiques de basculement, excepté pour l'ac-tionnement central idéal, font apparaître une hystérésis. Dans le chapitre 3, nous avons montréque même l'actionnement en force centrale présente une hystérésis, cumul d'une hystérésis géomé-trique (ou de branche) et d'une hystérésis matériau. Cependant, plus l'actionnement est décalé,plus l'hystérésis de branche domine. C'est à celle-ci qu'on s'intéresse dans ce chapitre.
Si le terme hystérésis est souvent associé à une perte d'énergie donc à un phénomène dé-gradant, il ne l'est pas forcément ici. Un montage idéal aurait même un hystérésis inverse pouraider le basculement (cf. Fig. 5.1). L'hystérésis est ici la conséquence de la présence de plusieursbranches. Comme les deux positions stables ne sont pas sur les mêmes branches, on aura unsaut de branche lors du basculement. Ce saut est di�érent en fonction du pilotage, par exemplepilotage à force donnée ou pilotage à déplacement donné. L'hystérésis permet d'allonger la zonestable, même dans le cas réel (cf. Fig. 5.2).
L'hystérésis associée aux comportements des zones stables doit être déterminé. On pourraitchercher à obtenir directement les zones stables des équations de basculement, avec un critère
sur la seconde dérivée de l'énergie tel que∂2Utot
∂2at,1≥ 0. Cependant, on doit prendre en compte
le fait que le pilotage du système se fait selon des variables qui ne sont pas les amplitudes descoe�cients at,1 et at,2, mais par exemple le déplacement d.

128 Étude dynamique
Fig. 5.1 � Hystérésis idéale. En positionstable, on a un seuil de basculement jus-qu'au seuil de basculement B1, puis la barreest motrice. L'énergie restituée est limitéepar la condition de passivité du système.
Fig. 5.2 � Hystérésis obtenue (ici dans lecas d'un pilotage en déplacement et enpoussé). L'hystérésis a tendance a augmen-ter la longueur des zones stables avant lasélection de la position alternative.
De fait, il apparaît qu'il est plus e�cace d'utiliser la courbe complète, qui mélange les branchesstables et les branches instables, puis de procéder à une sélection graphique des portions stablesen fonction du type d'actionnement. Nous avons en première approche utilisé des critères ma-thématiques pour sélectionner les branches, et les résultats n'ont pas été encourageants, soit lasélection n'est pas bonne, soit la sélection n'apporte qu'un appauvrissement de la solution �naleen retirant des portions malgré tout intéressantes. On rappelle qu'avec la méthode de résolutionutilisée ici, on n'a pas de dé�nition explicite des branches, juste des points de la branche obtenuspar résolution d'une équation di�érentielle implicite. Ce sont des courbes discrètes.
En Fig. 5.3, nous avons donné l'exemple d'une sélection graphique des branches stablesdans le cas d'un actionnement décalé. La première �gure (en (a)), donne la courbe théoriquetelle qu'obtenue après les calculs, incluant branches stables et instables. Aussi le système suitla branche jusqu'à l'intersection de la seconde branche stable, qui contient la seconde positiond'équilibre. On voit apparaître la zone dite stable ici, soit telle qu'on minimise en valeur absoluela force de rappel. Cependant, pour la seconde �gure (en (b)), on voit que ces zones stablespourraient s'allonger en prenant en compte un petit hystérésis matériau. Pour la troisième �gure(en (c)), nous avons refait la découpe cette fois dans le cas d'une barre poussée, et on obtientun basculement hors-équilibre dès (où juste un peu après pour accumuler un peu d'énergie) lepassage par le point de basculement, soit le point où la force de rappel change de signe. Dansce cas, la zone stable se trouve légèrement raccourcie. Dans le dernier cas (en (d)), on utilise unpilotage en force et le système bascule hors équilibre dès le passage par le point de force seuilde basculement, avec une zone stable très réduite et une très large hystérésis, qui ressemble plusà un rectangle que pour les autres. On notera que ce cas est le plus courant dans la littérature(sans les branches instables), car le plus simple à mettre en oeuvre expérimentalement et parcalcul en actionnement contraint.
En considérant ces graphes, issus d'une analyse sur un modèle quasi-statique, on voit l'intérêtdu couplage de l'étude statique avec une expérimentation dynamique. En e�et, si on n'y prend pasattention, une étude expérimentale nous limitera rapidement à une forme rectangulaire commedans le cas de la Fig. 5.3(d). Une étude éléments-�nis pilotée en force donnerait d'ailleurs le
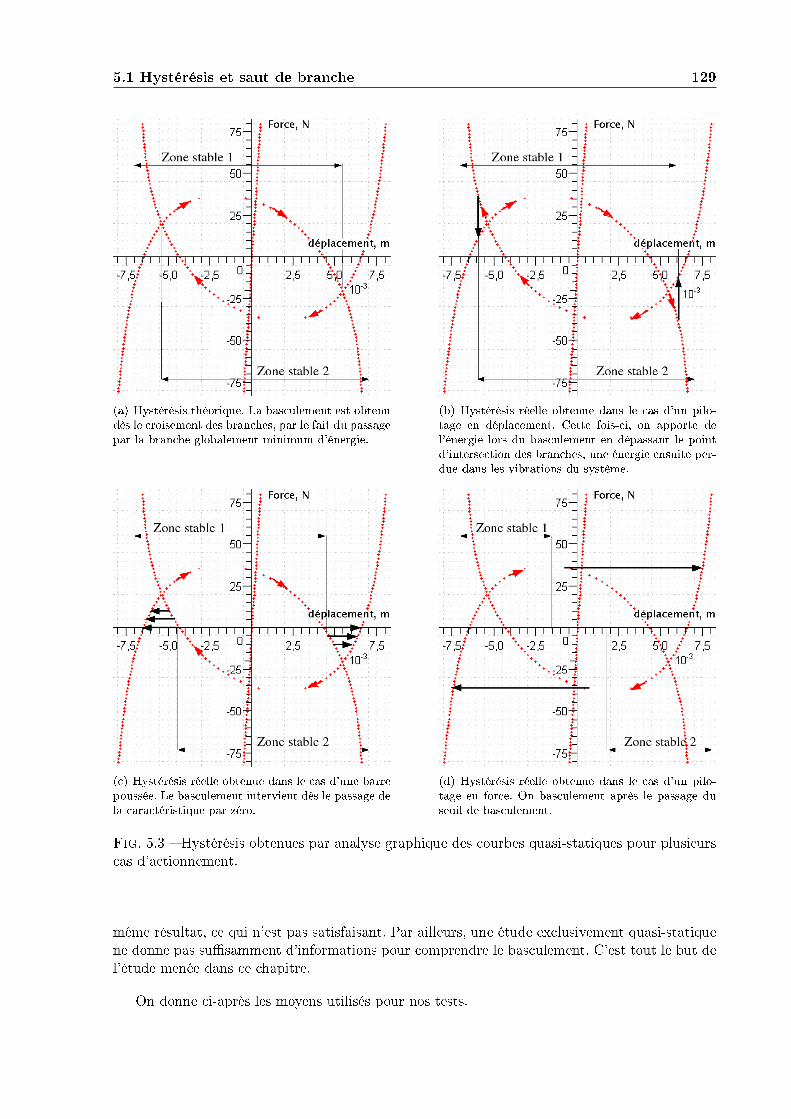
5.1 Hystérésis et saut de branche 129
(a) Hystérésis théorique. La basculement est obtenudès le croisement des branches, par le fait du passagepar la branche globalement minimum d'énergie.
(b) Hystérésis réelle obtenue dans le cas d'un pilo-tage en déplacement. Cette fois-ci, on apporte del'énergie lors du basculement en dépassant le pointd'intersection des branches, une énergie ensuite per-due dans les vibrations du système.
(c) Hystérésis réelle obtenue dans le cas d'une barrepoussée. Le basculement intervient dès le passage dela caractéristique par zéro.
(d) Hystérésis réelle obtenue dans le cas d'un pilo-tage en force. On basculement après le passage duseuil de basculement.
Fig. 5.3 � Hystérésis obtenues par analyse graphique des courbes quasi-statiques pour plusieurscas d'actionnement.
même résultat, ce qui n'est pas satisfaisant. Par ailleurs, une étude exclusivement quasi-statiquene donne pas su�samment d'informations pour comprendre le basculement. C'est tout le but del'étude menée dans ce chapitre.
On donne ci-après les moyens utilisés pour nos tests.

130 Étude dynamique
5.2 Principe de la photoélasticité
La photoélasticité est la propriété d'un matériau solide à devenir biréfringent sous l'e�et decontraintes mécaniques. C'est cette propriété de biréfringence qui est utilisée en photoélastici-métrie (soit la mesure des contraintes par photoélasticité) pour visualiser voire même mesurerdes déformations où des e�orts dans un matériau.
La biréfringence est la propriété que présentent certains matériaux de propager la lumièrequi les traverse ou se re�ète sur eux de façon anisotrope. L'indice de réfraction n'est pas uniqueet dépend des directions de propagation et de polarisation de la lumière qu'on leur applique.
Pour réaliser un banc de photoélasticité, on a besoin d'une lumière polarisée linéaire et d'un�ltre, qui est de fait lui aussi un �ltre linéaire. Un montage classique est d'utiliser une sourcelumineuse que l'on fait passer par un premier �ltre polariseur linéaire. Ceci crée une lumièrepolarisée. Ce �ltre est appelé polariseur (il polarise la lumière). Ensuite, on le fait traverser lalumière dans la pièce à analyser, biréfringente. En�n, la lumière obtenue traverse un second �ltrelinéaire identique au premier, qui va ne laisser passer que la lumière polarisée dans son orientation.On désigne ce second �ltre comme l'analyseur (il permet d'analyser la lumière ensuite). C'estcette lumière qu'on va observer ensuite, comme montré en Fig. 5.4.
Polariseur
Source lumineuse
Bistable
Analyseur
Observateur
sens de la lumière
Fig. 5.4 � Principe du banc de test optique.
Il existe deux grandes catégories de montages. Le premier utilise une lumière monochroma-tique. On utilise pour ceci soit une source lumineuse de couleur calibrée, soit une source lumineuseblanche (multichromatique) à laquelle on ajoute en sortie un �ltre monochromatique. Cette lu-mière sera ensuite �ltrée par le polariseur. Comme le matériau est biréfringent, il aura tendanceà changer l'orientation de la lumière dans les zones soumises à des contraintes, avec des lois dedéformation dépendant de la longueur d'onde. Puis la lumière passe dans l'analyseur, qui rejettetoutes lumière non-orientée dans son sens. Comme la lumière aura tendance à tourner dans lematériau, les zones où la lumière est tournée à 180 ou 360 degrés et leurs multiples pourrontêtre visibles travers de l'analyseur, comme montré en Fig. 5.5. Aussi se créeront des franges dedéformation, des zones blanches puis noires, qui indiquent des zones d'isocontraintes en noir etblanc (ou couleur). Ceci est très utilisé en photoélasticimétrie puisqu'il est alors facile de comp-ter les franges. En partant d'un point de référence (à priori un point non-contraint), on peut encomptant les franges qui séparent une zone donnée de la zone de référence (connue) déterminerle niveau de contrainte existant dans la zone.
L'autre catégorie utilise une lumière multichromatique (blanche). Si le montage est le même, lecomportement de la lumière au travers du matériau est di�érent. En e�et, celle-ci sera réorientéedi�éremment dans le matériau biréfringent selon sa couleur. Ainsi, après passage au travers de

5.2 Principe de la photoélasticité 131
(a) Utilisation de deux �ltres polariseurs. La lumièresemble s'éteindre lorsque les �ltres sont orientés per-pendiculairement.
(b) Utilisation de deux �ltres polariseurs avec un ma-tériau biréfringent homogène intercalé.
Fig. 5.5 � Utilisation des �ltres polariseurs.
l'analyseur, on obtient bien des franges, mais celles-ci sont colorées. On peut alors utiliser unetechnique d'analyse des franges et des couleurs pour obtenir une analyse plus précise, mais celle-ci est plus complexe qu'un choix approprié de matériau biréfringeant et de franges rapprochées.Cependant, visuellement, on obtient des épreuves en couleur des montages et ceci est très utiliséen détection de défauts ou pour toute approche visuelle des déformations. On donne des exemplesde ce type de montage en Fig. 5.6. Le premier exemple en (a) montre les contraintes résiduellesd'une pièce moulée, le second en (b) un test d'une pièce sous contraintes.
(a) contraintes résiduelles (b) contraintes forcées
Les photos précédentes sont publiées sous la license GNU Free Documentation license, version 1.2 or any later version de la Free SoftwareFoundation.Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation license, Version 1.2or any later version published by the Free Software Foundation ; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts.A copy of the license is included in the section entitled "GNU Free Documentation license".
Fig. 5.6 � Exemples classiques d'utilisation de la photoélasticité.
Comme nous souhaitons faire une étude visuelle et non déterminer précisement les contraintesdans le matériau, nous nous sommes basés sur la méthode multichromatique. Nous obtenons desphotos telles celle de la Fig. 5.7. On notera que contrairement à ce qui se fait normalement,notre système n'est pas plan et orthogonal à la caméra, puisqu'il se déforme par �ambement.

132 Étude dynamique
C'est une limitation intrinsèque de notre montage, on ne peut pas échapper à ce phénomène.
Fig. 5.7 � Une des photos de photoélasticité obtenue lors des tests. On voit apparaître des lignesde contraintes. L'image obtenue est délimitée par la forme circulaire du polariseur.
Dans les deux cas cités précédemment, une attention particulière doit être portée sur la sourcede lumière et son intensité. Un �ltre monochromatique aura tendance à diminuer fortement laquantité de lumière présente (puisque toute la lumière de couleur di�érente est bloquée). Un�ltre polariseur baisse la quantité de lumière de 1/
√2. De plus, si on veut prendre des vidéos
rapides, il faut penser que le temps d'exposition est court et que l'on a besoin d'une quantité delumière concordant avec la sensibilité du capteur et de la vitesse d'acquisition.
5.3 Caméra rapide
Nous avons utilisé une caméra rapide noir et blanc Phantom V9 de Vision Research, montréeen Fig. 5.8. Elle est équipée d'un capteur 1 600 x 1 200 de 2 400 ISO/ASA ayant une profondeurd'acquisition de 10 bits, et permet d'acquérir à 1 000 images par secondes (ips) pour le capteurentier. La caméra utilise des objectifs interchangeables Nikon utilisés en photographie argentique.
Fig. 5.8 � La caméra Phantom V9. Photo Vision research
C'est une caméra basée sur l'utilisation d'un capteur CMOS, qui est donc à peu près aussirapide que l'on veut. En e�et, de tels capteurs sont liés à la vitesse des phénomènes électriques.Ils ne sont donc pas structurellement limités en vitesse par des phénomènes mécaniques commepeuvent l'être des dispositifs mécaniques. Cependant, di�érents phénomènes brident malgré toutce type de caméra.

5.3 Caméra rapide 133
Le premier est la bande passante du contrôleur. En e�et, de telles caméras génèrent un volumeconsidérable de données. Par exemple, en VGA 10bits à 1 000 ips, on génère environ 384Mo/sde données. De plus, cette caméra a en fait une bien plus grande résolution et doit être capablede tout transférer pendant un temps d'horloge d'acquisition. Vu la vitesse, ces données sontbrutes et aucun traitement de compression temps réel n'est imaginable. On ne peut pas imaginertransférer directement toutes ces données sur un ordinateur externe. Aussi, ce type de caméra estéquipé d'une mémoire DDR-SDRAM interne, pilotée par un contrôleur embarqué. C'est celui-ciqui devient limitant à haute fréquence et on doit réduire la taille de la fenêtre d'acquisition (cequi réduit d'autant le nombre de données à transférer à chaque acquisition) lorsqu'on augmentefortement la vitesse. Ainsi, si on peut monter avec ce modèle de caméra à 1 000 ips pour le capteurcomplet (1 600 x 1 200), on se retrouve limité à 1 024 x 1 024 dès 2 000 ips.
L'autre limitation, qui est liée à la précédente, est celle de la taille de la mémoire. Commetoutes les données générées sont stockées en local, on doit ne pas dépasser la taille de la mémoirelors d'une acquisition. Cependant, la caméra utilisée ici est équipée d'une taille confortable demémoire (8Go), ce qui permet une acquisition longue et confortable. Un point à ne pas oublierest que vu la vitesse d'acquisition, le temps de synchronisation est grand. Par exemple, à 6 000 ips,si on met une demi seconde pour arrêter la caméra, ce sont 3 000 images perdues qui viennentremplir la mémoire.
Le fonctionnement de la synchronisation est contre toute attente non pas un fonctionnementpar déclenchement (on appuie sur le bouton pour démarrer la caméra, jusqu'à remplissage)mais à arrêt (on arrête l'acquisition lorsque l'on est sur d'avoir les données voulues). De fait, lacaméra acquiert en permanence des données en écrasant les anciennes données si on a dépasséla capacité de la caméra. On peut la laisser tourner en permanence, et lors de déclenchement onest sur d'avoir un certain temps d'acquisition avant le déclenchement (temps qui dépend de lataille des images et leur fréquence). On doit ensuite transférer ces données sur un PC et couperla portion utile pour obtenir les images ou les vidéos utiles.
En�n, une dernière limitation vient de la lumière. Si le capteur est un CMOS, ce n'en estpas moins un capteur de lumière et il faut lui apporter une quantité su�sante de lumière pourqu'il la détecte. Si sa sensibilité est très bonne (avec 2 400ASA), il est néanmoins nécessaire debeaucoup éclairer les systèmes à haute vitesse, le temps d'exposition étant bien entendu inférieurau temps entre deux photos. Par exemple, on a eu des expositions de 50µs (1/20 000ème), cequi nécessite un éclairage très puissant. On note que l'usage d'une caméra noir et blanc permetd'avoir beaucoup plus de sensibilité. En e�et, les capteurs CMOS sont tous sensibles à toutelumière (soit noir et blanc). Les capteurs couleurs sont simplement des capteurs noir et blancsur lesquels on appose un �ltre trois couleurs, la couleur étant recomposée à partir de troispixels élémentaires ayant un �ltre di�érent et permettant de retrouver toute couleur. Aussi, leursensibilité est bien limitée (600ASA) et la résolution est divisée par 3.
Tout l'intérêt de tels capteurs est qu'ils sont basés sur une technologie qui sera limitée par lavitesse de la lumière et non celle du son comme une technologie mécanique. Le basculement estune vitesse mécanique (transfert d'énergie dans le système et vibrations) et donc sera limité parla vitesse du son dans la pièce. Un tel dispositif est très bien adapté pour permettre d'observerle comportement de ces systèmes bistables. Les vitesses d'acquisition sont très importantes,même si elles restent limitées par la technologie du moment. Pour donner un ordre de grandeur,aujourd'hui on peut acquérir sans soucis à 5 000 ips, voire à 20 000 ips en fenêtre réduite etavec beaucoup de lumière. En comparaison, un capteur à jauge, technologie mature, permetd'acquérir jusqu'à environ 50 kHz (limitation due au temps de réponse), et un capteur de forcepiézoélectrique à environ 80 kHz.

134 Étude dynamique
5.4 Bancs de test employés
Nous avons employé pour les tests deux bancs d'essais. Le premier est un banc d'essai quipermet de voir les déformations par la géométrie, le second permet lui de voir les contraintesdans le matériau. Ces deux bancs ont été utilisés conjointement, cependant les dimensions desbistables utilisés sont di�érentes pour s'adapter aux spéci�cités de chacun.
5.4.1 Tests sur la tranche
Le test sur la tranche est le montage qui permet de voir les déformations d'un point de vuegéométrique. On regarde la géométrie de la poutre à un instant donné. C'est en fait le mêmemontage que les tests en force, les dimensions sont identiques et l'appui est ici aussi obtenu entranslatant la table Thorlabs verticale. On se référera au chapitre 3 pour plus de détails. Les�gures Fig. 3.5 et Fig. 3.6 ont d'ailleurs été obtenues avec le même banc de test et dans lesmêmes conditions.
5.4.2 Tests en photoélasticité
Pour ces tests, on veut visualiser les contraintes dans le matériau. Il faut donc non pas regarderla tranche comme précédemment, mais bien la surface du bistable. Comme pour des raisons depoids, l'axe de vision de la caméra doit être gardé vertical, nous avons changé le montage etutilisé un montage vertical , c'est-à-dire que la profondeur b est cette fois-ci dans la directionverticale.
Le montage est toujours �xé sur une table à trous Thorlabs. On doit lui ajouter le systèmede polarisation. De plus, il a fallu bloquer la lumière extérieure, puisque nous ne travaillions pasen chambre noire, ce qui aurait été souhaitable dans ce cas. On a utilisé une boîte en carton noir,normalement prévu pour bloquer la lumière rouge des lasers mais qui répond bien au besoin denotre montage. Nous avons ensuite attaché les �ltres à ce même carton.
Les �ltres employés sont des �ltres polariseurs linéaires de B&W, de diamètre 67mm, dumatériel de photographie. Nous aurions pu aussi employer des plaques polarisantes dédiées oudes polariseurs professionnels, mais la solution de �ltres photographiques a été retenue pour desraisons de coût. Ce type de �ltre est fourni monté sur une bague rotative, qui permet d'orienterle �ltre à notre convenance sans soucis. Comme les �ltres sont destinés à être montés sur ducarton, nous avons fait deux troux dans la boîte et les �ltres ont été montés ajustés serrés. Ilsont parfaitement tenus lors des tests.
Pour le matériau, nous avons retenu une lame en Lexan, un matériau biréfringent de GeneralElectrics [1]. Ce matériau est très souple. Il est en terme de biréfringence beaucoup plus sensibleaux contraintes que peut l'être de l'acrylique par exemple, que nous avons testé. Ceci permetd'obtenir beaucoup de changement de couleurs, ce qui facilite notre travail d'analyse. En e�et,si la plupart des exemples de photoélasticité sont fait avec de l'acrylique (comme il semble l'êtrepour l'exemple de la Fig. 5.6(a)), on rappelle que notre montage nécessite à la fois une fortedéformation (soit une lame souple et capable d'encaisser un haut niveau de déformation) et descontraintes faibles (ce qui impose un matériau très sensible aux déformations). Nous ne sommespas du tout dans le cadre classique où les forces sont élevées et les déformations négligeables.
Le montage ouvert est représenté en Fig. 5.9(a). On voit le montage vertical de la lamebistable au fond, �xé sur la table à trous. Le système d'appui est à droite, monté sur une tablede translation horizontale. La forme particulière de la plaque d'appui est destinée à gêner auminimum le passage de la lumière. On verra systématiquement une ligne noire verticale sur lesexpériences de photoélasticité, fruit de la présence de la plaque d'appui. Le montage une foisfermé est montré en Fig. 5.9(b). Sur cette �gure, on voit le carton noir et l'analyseur.

5.4 Bancs de test employés 135
système d'appui
lame
ligne d'appui
(a) capot ouvert (b) capot fermé
Fig. 5.9 � Banc de test photoélasticité, capot ouvert en (a) et fermé en (b).
A cause de l'utilisation de �ltres circulaires (surtout d'un analyseur de forme circulaire), onobtient une image circulaire et du noir autour, comme on le voit en Fig. 5.7. Nous sommeslimités en largeur par ce phénomène, malgré l'usage de �ltres polariseurs de grande taille. Aussi,nous avons limité la largeur de la poutre à 70mm, pour une épaisseur de 1mm et une largeurde 28,5mm, ce qui permet de garder une bonne couverture de la poutre par les photos. De fait,seule une portion réduite de la poutre n'est pas observable et reste presque noire. On voit malgrétout les limites de la poutre par ré�ection interne de la lumière dans le matériau, mais ceci nepermet pas d'obtenir une information de photoélasticité.
5.4.3 Sources de lumière
Nous avons utilisé di�érentes sources de lumière pour les tests. La première a été une am-poule Edison 100W, qui a montré rapidement des limites (lumière trop concentrée, référencede l'ampoule visible qui vient polluer des photos). Après celle-ci nous avons essayé une lumièrestabilisée d'un microscope, bien plus homogène et de plus réglable en intensité. Cependant ellen'était pas assez puissante à haute vitesse. Un autre point est que comme il s'agit d'une lumièredestinée à être montée dans un dispositif optique, elle était canalisée dans la direction optiquemais avec une section trop faible. Aussi nous avons eu des di�cultés à mettre de la lumière surtoute l'étendue du �ltre, assez large (67mm) pour un dispositif optique. En �n de compte, nousavons utilisé une lampe halogène qui accompagne notre caméra rapide. Celle-ci est réglable enintensité et sa position est réglable à souhait grâce à un support orientable.
Pour les montages sur la tranche, il n'est pas nécessaire d'utiliser la lumière directement, onne perd pas de lumière puisqu'on ne passe pas par des �ltres. Aussi, on a utilisé un éclairageindirect, la lampe étant montée derrière la caméra et se re�étant sur une plaque située derrièrele montage, permettant de bien répartir la lumière.
Pour les montages de photoélasticité, nous avons utilisé un éclairage direct puisqu'il faut toutd'abord que la lumière rentre dans le carton (donc la source doit être derrière le polariseur) etde plus il y a des pertes dues aux �ltres. Aussi, la lumière est placée en ligne.
Par ailleurs, pour rendre la lumière plus di�use, nous avons utilisé un papier calque entre lalampe et le montage, qui di�use la lumière. C'est une solution simple pour améliorer l'homogé-néité de la lumière. Cependant, ceci induit une perte d'intensité lumineuse.

136 Étude dynamique
5.5 Résultats obtenus
Les résultats obtenus sont avant tout des vidéos noir et blanc. Nous allons néanmoins essayerde donner une analyse textuelle la plus complète possible dans ce chapitre. Des chronographesvont également illustrer les résultats obtenus.
5.5.1 Quelques observations diverses
L'éclairage a vraiment été un point di�cile lors de la réalisation des tests. Un éclairageinadapté entraîne une saturation des couleurs en photoélasticité qui empêche d'obtenir toutrésultat. C'était cependant plus simple dans le cas du banc de test sur la tranche, où on récupèreune information binaire (présence ou non de la poutre sur un pixel), très peu sensible au niveaud'éclairage.
Le réglage de la lumière se fait par trois paramètres. Le temps d'exposition (inférieur autemps de cycle de la caméra), l'ouverture du diaphragme et l'intensité de la source lumineuse.Les objectifs sont des objectifs standards de photographie, non-automatiques. Ceci rend trèssimple l'ouverture du diaphragme, commandé par une simple bague rotative sur l'objectif.
Un autre souci, apparu lors de l'usage de la caméra rapide pour les expériences sur la tranche,est de ne pouvoir béné�cier d'une réelle installation photographique. L'éclairage s'est fait par unspot halogène placé sur un des cotés de la caméra. Malheureusement, ceci entraîne une dissymétriede l'éclairage, bien visible sur le chronographe de la Fig. 3.5 ou celui de la Fig. 3.6.
Un phénomène assez intrigant est que lors de l'usage de la caméra rapide à haute vitesseon voit la lumière scintiller. C'est en fait le résultat de la variation de courant et tension dansles lampes. Nous avons utilisé de simples lampes halogènes branchées sur le 50Hz alternatif. Lecoût d'une lampe stabilisée était trop élevé pour une expérience isolée. Aussi on obtient uneoscillation. Contrairement à ce qu'on peut penser, cela peut être un avantage, puisqu'on peutainsi obtenir une idée du temps lorsqu'on visualise les vidéos, avec un scintillement à 100Hz (onutilise avec une lampe par résistance les deux alternances à 50Hz, soit un scintillement global à100Hz).
La chaleur dégagée par la lampe peut aussi entraîner des échau�ements voire des brûlures. Cesont 100W-200W consommés par des lampes qui n'ont que quelques pourcents de rendement,soit des puissances calori�ques énormes dégagées près des lampes. Le dégagement calorique estréellement un problème lors des montages.
5.5.2 Di�érentes échelles de temps
Di�érents tests ont été menés. Les premiers tests ont été réalisés en quasi statique et nousavons pris des photographies de di�érentes positions. Nous avons aussi fait un test avec unecaméra normale en couleur de photoélasticité pour valider le montage expérimental.
La caméra étant en noir et blanc, on ne pouvait pas obtenir de vidéo en couleur. Ceci n'estpas un souci pour les tests sur la tranche, pour lesquels seule la géométrie importe, mais poseplus de problèmes pour les tests de photoélasticité, où les couleurs sont souhaitables. Aussi, ona fait une série de tests de photoélasticité avec un appareil photo avant de le reproduire avec lacaméra rapide.
Pour les montages sur la tranche, nous avons réalisé des vidéos pour des appuis à 35%, 40%,45% et 50% de la longueur. Trois séries de tests ont été menées. Une première à vitesse normale(50 ips) sur toute la course a permis de voir les déformations quasi-statiques. Une seconde sérieà 1500 ips était destinée à voir les vibrations après le basculement. En�n, un essai a été réaliséà très haute vitesse pendant le basculement.
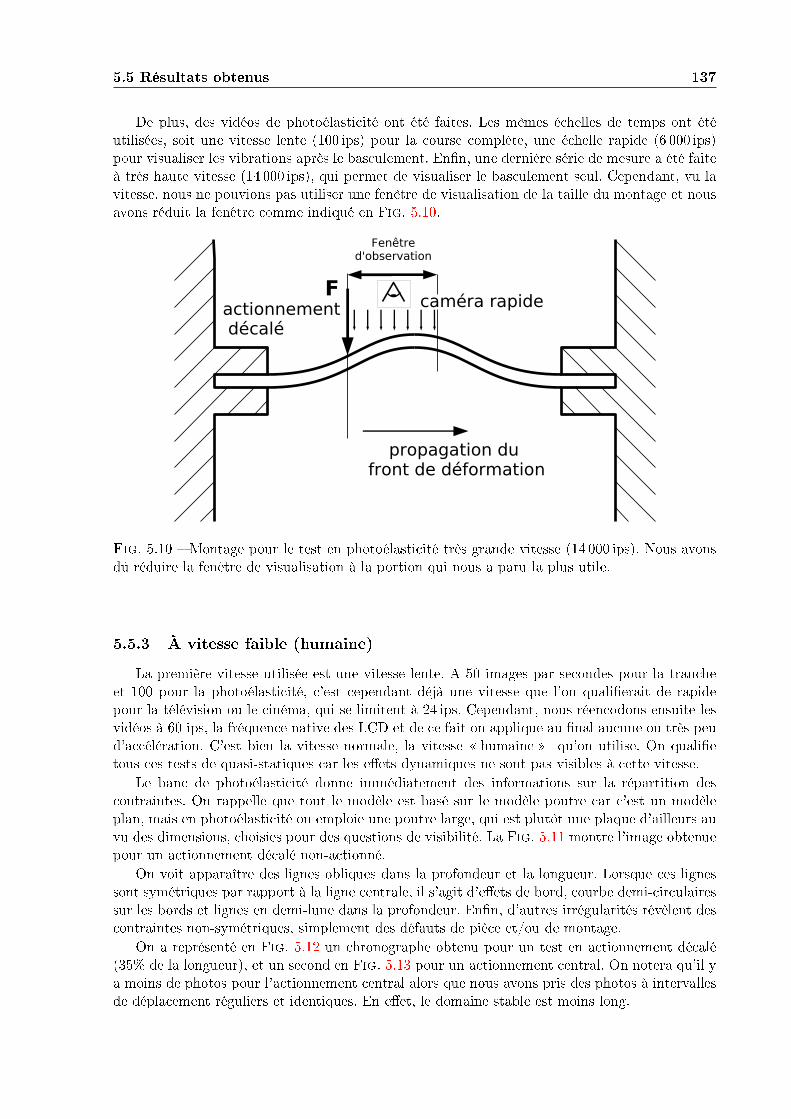
5.5 Résultats obtenus 137
De plus, des vidéos de photoélasticité ont été faites. Les mêmes échelles de temps ont étéutilisées, soit une vitesse lente (100 ips) pour la course complète, une échelle rapide (6 000 ips)pour visualiser les vibrations après le basculement. En�n, une dernière série de mesure a été faiteà très haute vitesse (14 000 ips), qui permet de visualiser le basculement seul. Cependant, vu lavitesse, nous ne pouvions pas utiliser une fenêtre de visualisation de la taille du montage et nousavons réduit la fenêtre comme indiqué en Fig. 5.10.
Fenêtred'observation
Fcaméra rapideactionnement
décalé
propagation du front de déformation
Fig. 5.10 � Montage pour le test en photoélasticité très grande vitesse (14 000 ips). Nous avonsdû réduire la fenêtre de visualisation à la portion qui nous a paru la plus utile.
5.5.3 À vitesse faible (humaine)
La première vitesse utilisée est une vitesse lente. A 50 images par secondes pour la trancheet 100 pour la photoélasticité, c'est cependant déjà une vitesse que l'on quali�erait de rapidepour la télévision ou le cinéma, qui se limitent à 24 ips. Cependant, nous réencodons ensuite lesvidéos à 60 ips, la fréquence native des LCD et de ce fait on applique au �nal aucune ou très peud'accélération. C'est bien la vitesse normale, la vitesse � humaine � qu'on utilise. On quali�etous ces tests de quasi-statiques car les e�ets dynamiques ne sont pas visibles à cette vitesse.
Le banc de photoélasticité donne immédiatement des informations sur la répartition descontraintes. On rappelle que tout le modèle est basé sur le modèle poutre car c'est un modèleplan, mais en photoélasticité on emploie une poutre large, qui est plutôt une plaque d'ailleurs auvu des dimensions, choisies pour des questions de visibilité. La Fig. 5.11 montre l'image obtenuepour un actionnement décalé non-actionné.
On voit apparaître des lignes obliques dans la profondeur et la longueur. Lorsque ces lignessont symétriques par rapport à la ligne centrale, il s'agit d'e�ets de bord, courbe demi-circulairessur les bords et lignes en demi-lune dans la profondeur. En�n, d'autres irrégularités révèlent descontraintes non-symétriques, simplement des défauts de pièce et/ou de montage.
On a représenté en Fig. 5.12 un chronographe obtenu pour un test en actionnement décalé(35% de la longueur), et un second en Fig. 5.13 pour un actionnement central. On notera qu'il ya moins de photos pour l'actionnement central alors que nous avons pris des photos à intervallesde déplacement réguliers et identiques. En e�et, le domaine stable est moins long.

138 Étude dynamique
Fig. 5.11 � Photo obtenue avec le banc de test de photoélasticité pour un actionnement décalé,mais non-actionné (la ligne noire indique la position de la plaque d'actionnement). On voit dese�ets de bords et des irrégularités.
En comparant actionnement central et actionnement décalé, l'actionnement central semblebeaucoup plus symétrique, et ne semble pas avoir de grosses concentrations de contraintes (l'ac-tionnement décalé par contre a des franges très noires plus intenses). Un point intéressant estqu'il semble apparaître une sorte de ligne de contrainte à la droite de l'actionneur qui se déplaceet disparait lors du basculement. C'est cette ligne qu'on va suivre de près à très haute vitessepour comprendre où elle va.
Il est surprenant de noter autant de défauts au modèle via un test par photoélasticité. Ce-pendant, la photoélasticité donne des indications sur l'état de contrainte à un module près. Cepoint est très important. On voit la variation des contraintes plus que le niveau de contraintes.On obtiendrait un renseignement sur le niveau de contraintes en comptant les franges, et pourdes bancs plus précis que celui que l'on a employé, qui sert simplement à révéler la présencede contraintes. Aussi, dans notre cas, les variations de contraintes sont relativement faibles etles modèles restent valides, comme le prouve le banc de test statique du chapitre 3. La seulecontrainte qui semble réellement signi�ante reste la ligne noire que l'on voit apparaître pourl'actionnement décalé.
En�n, concernant les images obtenues pour le banc de test sur la tranche, nous avons obtenules chronographes des Fig. 3.5 et en Fig. 3.6. Ici aussi les deux premiers modes de �ambementsapparaissent successivement, soit les déformations topologiques. On se réfèrera pour l'analyse dece comportement au chapitre 3.
5.5.4 À grande vitesse (1 000 - 6 500 ips), étude des vibrations
Nous avons procédé à une séquence de tests à grande vitesse. L'accélération obtenue parrapport à la vitesse normale est de 50 (avec une vitesse d'enregistrement de 1 500 ips) pour lestests sur la tranche et de 120 pour les tests de photoélasticité (avec une vitesse d'enregistrementde 5 000 ips). On souhaite voir comment le système bascule et dissipe son énergie.
Le test sur la tranche montre deux étapes. Le premier est le basculement, qui correspondà un assez grand déplacement rapide, et que nous avons montré en Fig. 5.14 et en Fig. 5.15.Ceci montre comment le système change dynamiquement de con�guration pour passer dansle second domaine stable. Ensuite, toute une période de vibrations intervient, vibrations qui
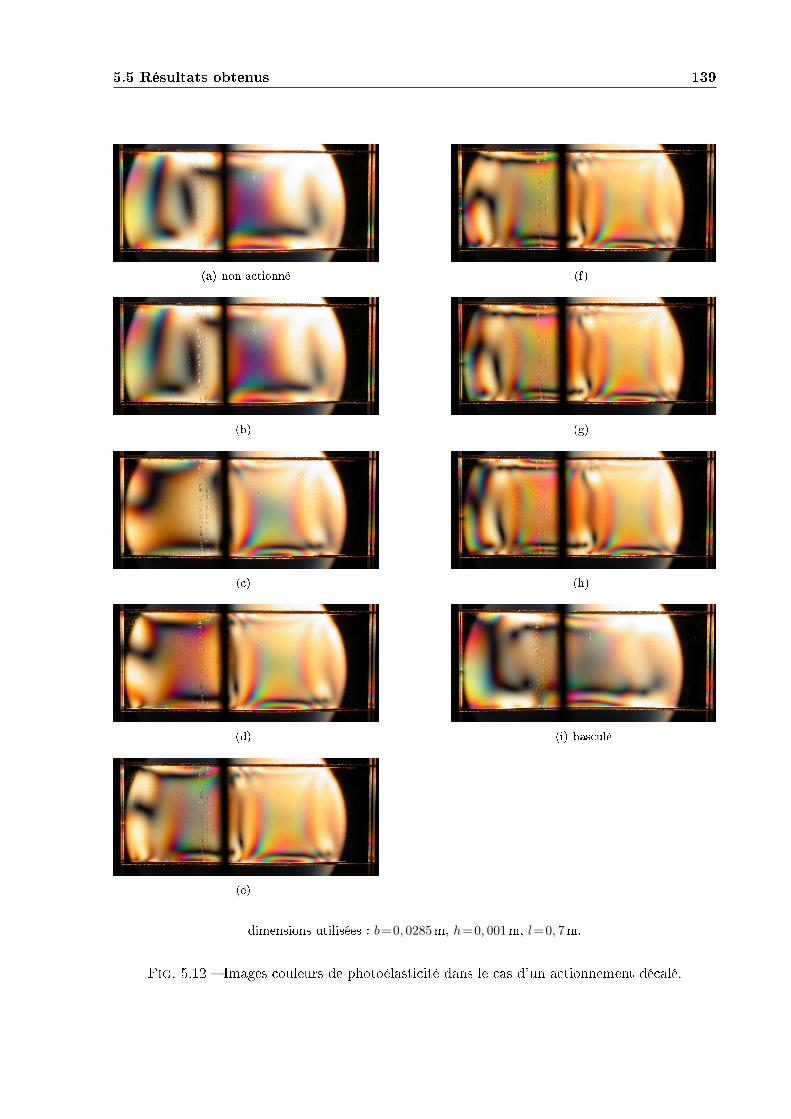
5.5 Résultats obtenus 139
(a) non actionné (f)
(b) (g)
(c) (h)
(d) (i) basculé
(e)
dimensions utilisées : b=0, 0285m, h=0, 001m, l=0, 7m.
Fig. 5.12 � Images couleurs de photoélasticité dans le cas d'un actionnement décalé.
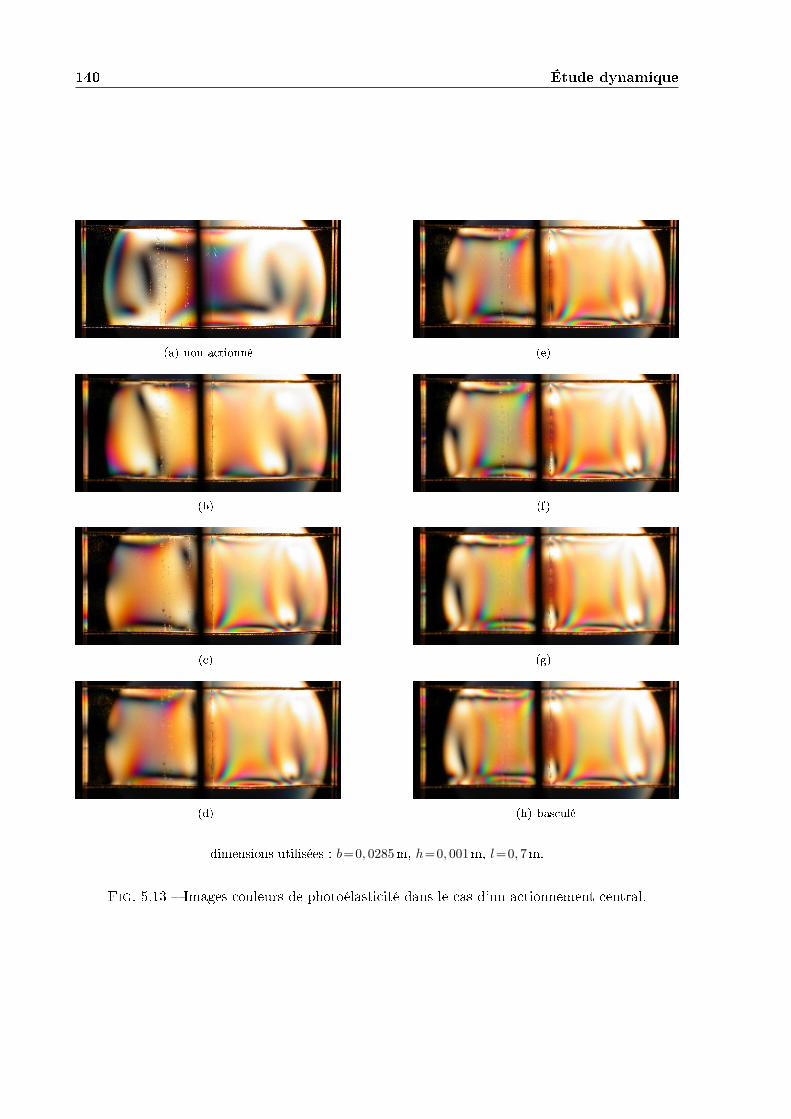
140 Étude dynamique
(a) non actionné (e)
(b) (f)
(c) (g)
(d) (h) basculé
dimensions utilisées : b=0, 0285m, h=0, 001m, l=0, 7m.
Fig. 5.13 � Images couleurs de photoélasticité dans le cas d'un actionnement central.

5.5 Résultats obtenus 141
deviennent peu à peu plus régulières. Ainsi, si on commence par des vibrations assez chaotiques,progressivement on passe à des vibrations plus régulières, utilisant des ondes stationnaires. Onnote que des modèles ont été développés depuis longtemps pour analyser de telles vibrations,tel [52].
On remarquera que si le basculement en actionnement central, donc symétrique, se dirigepresque instantanément vers des vibrations stationnaires (symétriques elles aussi), le basculementdans le cas de l'actionnement décalé (donc asymétrique) commence par une phase perturbée pluslongue.
Malheureusement, l'étape de vibration correspond à des déformations relativement faibles.Elles ont un très bon rendu en vidéo, mais ne sont pratiquement pas visibles sur un chronographe.
En �n de compte, grâce aux vibrations, le système va peu à peu dissiper son énergie, réduisantl'amplitude des vibrations jusqu'à complètement arrêter de vibrer.
Concernant le test de photoélasticité, on voit également apparaître ces deux phénomènes. Unpremière étape, furtive correspond au départ de la ligne de contraintes que l'on a vu en Fig. 5.12pour l'actionnement décalé. Il n'y a rien de vraiment clair concernant l'actionnement central.C'est cependant di�cile à voir.
En�n intervient une étape de vibration. Alors que le test sur la tranche fait apparaître desvibrations plan, la photoélasticité montre surtout des vibrations de plaques, comme visualisé enFig. 5.16, donnée pour l'actionnement décalé (l'actionnement central ne donne pas de résultat enchronographe). Deux cycles de vibration en modes plaques ont été sélectionnés, il faut imaginerque ces motifs se reproduisent des dizaines de fois avant dissipation complète de l'énergie.
Un dernier point est que nous avons pu utiliser ces tests pour mesurer expérimentalementle temps de basculement, en séparant le basculement en lui-même et les vibrations. Nous avonsutilisé à cet e�et le banc de photoélasticité. Nous obtenons un basculement (correspondant à latransition dynamique) d'environ 3,5ms pour l'actionnement central, et 1,5ms pour l'actionne-ment décalé, hors vibrations.
5.5.5 À très grande vitesse (>14 000 ips), étude du basculement
On a vu apparaître furtivement un déplacement de la ligne de contrainte dans les testsprécédents, mais sans pouvoir obtenir plus de renseignements, du fait de la vitesse très élevée.Aussi, nous avons procédé à un test supplémentaire, cette fois à très grande vitesse, 14 000 ips,pour observer le comportement au moment qui suit le départ du basculement.
A cette vitesse, nous avons dû réduire la taille de la fenêtre de vision de la caméra. Ainsi,pour le test sur la tranche, nous ne voyions qu'une portion réduite de la poutre (comme indiquéprécédemment, cf. Fig. 5.10), ce qui s'est révélé insu�sant pour comprendre ce que l'on voyait.De plus, en prenant les images successives obtenues à 1500 ips, nous avions déjà une très bonneinformation.
A l'opposé, les tests en photoélasticité nous ont permis de bien suivre la ligne de contraintes,très visible. Un temps d'exposition de 50µs (soit 1/20 000ème) et un intervalle entre deux prisesde vue de 71µs (soit 14 100 ips) ont été utilisés. En Fig. 5.17, nous montrons le chronographeobtenu juste après le départ libre de la poutre (soit le comportement instable de basculement),dans le cas d'un actionnement décalé à 40% de la longueur de la poutre. Comme la fenêtre devision est réduite, seule une portion de la poutre est visible. Une des extrémités de la fenêtre devision correspond à la plaque d'actionnement.
La première photo (Fig. 5.17(a)) représente la répartition des contraintes dans un état encorestable, tout juste avant le départ du basculement. On voit bien la ligne verticale de contraintes.Ensuite le système se met à basculer (à environ 3300µs), et le front se déplace vers la droite(cf. Fig. 5.17(b)), une seconde ligne de contraintes apparaît (cf. Fig. 5.17(c)). Elle peut êtresimplement due au module de la concentration de contrainte, ceci ne veut pas dire qu'il y a deux

142 Étude dynamique
(a) stable (g) (m)
(b) démarrage du basculement (h) (n)
(c) (i) départ des vibrations (o)
(d) (j) (p)
(e) (k) (q)
(f) (l) (r)
dimensions utilisées : b=0,02m ; h=0,0004m ; l=0,1m, appui à 40%.
temps d'exposition : 660µs (soit 1/1 515ème), période : 666µs (soit 1 500 ips).
N.B. : On a donné des photos qui se suivent.
Fig. 5.14 � Chronographe du basculement, grande vitesse et actionnement décalé 40%.
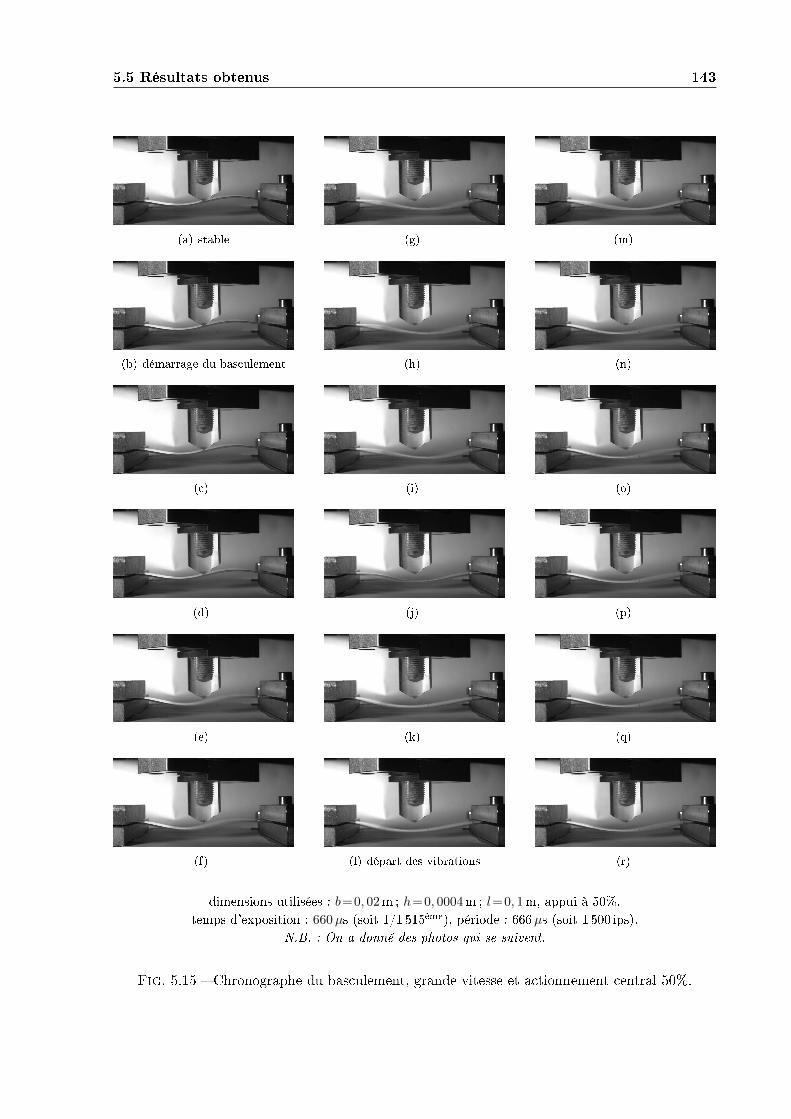
5.5 Résultats obtenus 143
(a) stable (g) (m)
(b) démarrage du basculement (h) (n)
(c) (i) (o)
(d) (j) (p)
(e) (k) (q)
(f) (l) départ des vibrations (r)
dimensions utilisées : b=0, 02m ; h=0, 0004m ; l=0, 1m, appui à 50%.
temps d'exposition : 660 µs (soit 1/1 515ème), période : 666µs (soit 1 500 ips).
N.B. : On a donné des photos qui se suivent.
Fig. 5.15 � Chronographe du basculement, grande vitesse et actionnement central 50%.

144 Étude dynamique
(a) (g) (m)
(b) premier maximum (h) (n)
(c) (i) deuxième maximum (o)
(d) (j) (p)
(e) (k) (q)
(f) (l) (r) troisième maximum
dimensions utilisées : b=0, 0285m, h=0, 001m, l=0, 7m, appui à 35%.
temps d'exposition : 50µs (soit 1/20 000ème), période : 182µs (soit 5 495 ips).
N.B. : On a donné des photos qui se suivent.
Fig. 5.16 � Chronographe des vibrations vues par photoélasticité, actionnement décalé 40%.

5.5 Résultats obtenus 145
ligne, mais simplement que la déformation se déplace et augmente. En�n, le système basculecomplètement (cf. Fig. 5.17(d)) et change de con�guration, ce qui semble indiquer qu'il a suivitout d'abord la branche stable puis bascule après avoir accumulé un peu d'énergie, tel que dé�nien Fig. 5.3(c). En�n, le système se met à vibrer pour dissiper son énergie interne, tel quemontré dans les tests précédent à grande vitesse. Malheureusement, on ne peut pas avec notrecaméra suivre la propagation complète de la ligne de contraintes. Cependant, nous supposonsqu'elle se propage jusqu'au bout de la poutre et ne revient pratiquement pas, puisqu'elle seraimmédiatement noyée dans les vibrations qui démarrent instantanément.
(a) à 3195µs (stable) (b) à 4118µs (instable)
(c) à 4473µs (instable) (d) à 4828µs (basculé)
Fig. 5.17 � Déplacement de la ligne de contraintes pour un actionnement décalé, prise en camérarapide à très grande vitesse. La ligne de contrainte va se déplacer vers la droite et permettre lesaut de branche. Le basculement instable commence à à peu près 3 300µs.
On parle ici de ligne de contraintes sans préciser l'intensité de ces contraintes, puisqu'on nela connaît pas. On voit apparaître une ligne semblable dans la Fig. 5.12. Celle-ci semble bienêtre une ligne de contraintes nulles, la limite entre les deux ventres du mode 2, soit un noeudde déformation et une ligne de contrainte faible. Ce n'est cependant pas celle-ci qu'on surveilledans les tests à très grandes vitesses, et on ne peut rien déduire sur le niveau de contraintes,simplement sur le fait que les variations de contraintes sont très rapides dans cette zone.
Nous avons a obtenu des résultats intéressants dans le cas de l'actionnement décalé, et nousavons aussi fait le test pour l'actionnement central. Pour ce dernier, on a aussi l'impression devoir une petite ligne de contrainte partir, mais très peu visible et ceci peu masquer un autre
146 Étude dynamique
phénomène. On peut comprendre ceci en se rappelant que théoriquement, il n'y a pas de saut debranche pour un actionnement central, on suit une même branche de déformation (la branche deraideur inverse), la déformation est continue. Aussi, il ne peut pas y avoir un ligne de déformationaussi marquée que pour l'actionnement central.
5.6 Récapitulatif et discussion
L'étude dynamique expérimentale que nous avons réalisée permet de montrer qu'il coexistetrois phénomènes durant le basculement. Le premier, qui correspond à un comportement quasi-statique, est une déformation qui suit la topologie à deux modes évoquée dans les chapitresprécédents.
Ensuite apparaît un phénomène furtif de basculement en lui-même, qui permet à la structurede se recon�gurer pour changer de domaine stable. Celui-ci s'accompagne d'une propagationd'énergie dans la structure, un front de déformation qui se déplace à priori à une vitesse del'ordre de la vitesse du son dans ce matériau, qui permet par une sorte de balayage de la structured'accompagner la recon�guration dans la seconde position stable. On note que ce phénomène estbeaucoup moins violent dans le cas d'un actionnement central.
En�n, un dernier phénomène est une vibration post-basculement, qui permet au systèmede dissiper l'énergie qu'on lui a apporté pour qu'il bascule. D'abord irrégulières, ces vibrationsdeviennent rapidement cycliques.
A chacune de ces étapes correspond une vitesse. La première est à la vitesse normale, laseconde à 50-150 fois la vitesse normale, la dernière est très rapide (500 fois environ). C'est pourcela qu'on doit utiliser des tests séparés pour les visualiser à la caméra rapide.
Nous n'utilisons pas le terme de claquage pour basculement. On espère que les expériencesexpliquent en elles-mêmes pourquoi. En e�et, le terme de basculement, qui vient des interrupteurset donc de l'électrotechnique, semble plus adapté ici. Le terme de claquage évoque un � clac �,une émission sonore, qui apparaît bien et rend ce terme adapté pour le phénomène en jeu, maisil ne décrit pas le fait que la structure se recon�gure pour changer de position stable. Cependant,on a montré que le clac vient des vibrations qui apparaissent après le basculement, sans en faireréellement partie.
L'actionnement décalé donne un basculement plus rapide, on a calculé comme indiqué pré-cédemment environ 1,5ms pour un actionnement décalé, contre 3,5ms pour un actionnementcentral. La di�érence est grande, et de plus compare deux phénomènes identiques, la recon�gu-ration depuis un mode de déformation 2 vers un mode 1. Ceci peut-être expliqué par l'intensité dufront de contrainte (et donc de déformation) qui apparaît pour un actionnement décalé, qui aidele système à basculer plus rapidement. De plus, nous avons obtenu une fatigue prématurée de lastructure en l'actionnement décalé, alors que nous ne l'obtenions pas pour l'actionnement centraldans les mêmes conditions. Aussi, nous suspectons la ligne de contraintes d'être responsable decette fatigue, comme le phénomène dynamique est plus intense dans le cas de l'actionnementdécalé.
Un dernier point soulevé par ce banc est que le système bouge de lui-même au cours dubasculement. Ce point est très important, puisqu'un mécanisme bistable est stable sur chacunde ses domaines stables et doit être capable de converger de lui-même vers sa position stablelorsqu'il n'est pas sollicité. On n'aurait pas pu voir ce phénomène avec un banc de test en forceconstante, car dans ce cas l'actionneur serait supposé continuer à pousser la structure en toutesconditions.

5.7 Conclusion 147
5.7 Conclusion
Nous avons pu présenter ici une étude complète des phénomènes de basculement. Nous nenous limitons pas à constater qu'à un certain point intervient le basculement, comme toutes lesétudes seulement quasi-statiques.
L'usage de la caméra rapide est ici une nouveauté par rapport aux vidéos disponibles actuel-lement, qui se contentent d'un rendu temps réel et masquent tous les phénomène intermédiaires.Nous avons aussi pu calculer visuellement le temps réel de basculement (hors vibration), mêmesi d'autres méthodes existent déjà, par exemple avec des capteurs de déplacement comme desvibromètres laser.
De plus, nous avons utilisé la photoélasticité, ce qui est nouveau dans le contexte des bis-tables, pour visualiser la répartition. Mieux, à haute vitesse, on obtient une information (mêmeincomplète et di�cile à interpréter avec sûreté) sur les ondes de déformation qui se créent lorsdu basculement. Ceci permet aussi de mettre en avant quelques limitations des modèles baséssur les modes de déformations, même si la concordance globale est très bonne.
En�n, nous avons pu mettre en avant trois échelles de temps, qui correspondent à autantde phénomènes qui apparaissent lors du basculement. Une première est la vitesse � humaine �,la vitesse quasi-statique qui permet au système de se déformer sous équilibre. Ensuite lors dubasculement, un épisode très rapide voit se propager un front de déformation qui permet ausystème de basculer vers l'autre position d'équilibre. Suit en�n un épisode de vibrations moinsrapide, qui justi�e le nom de claquage, c'est le bruit que l'on entend lors du basculement.

148 Étude dynamique

Conclusion
Nous avons présenté au long de ce travail une étude très complète du comportement d'untype de structure bistable, les poutres bi-encastrées �ambées.
Un modèle du comportement nouveau est développé. Il se base sur les mêmes outils queplusieurs études de la littérature, mais apporte une nouvelle approche de résolution des équa-tions basée sur une étude analytique du comportement. Ceci nous a permis de présenter des casd'actionnements qui ne pouvaient pas être étudiés avec les travaux précédents, en l'occurrencetous les actionnements combinés modes 1 et 2, notamment l'actionnement en force décalé qui aété très étudié sur banc de test. De plus, nous retrouvons les résultats précédents de la littéra-ture. Nous avons ainsi développé une méthode qui décrit le comportement, qui nous semble plusintéressante qu'une méthode qui masquerait la physique en jeu. Cette méthode a aussi conduità une classi�cation des actionnements, selon leur topologie de basculement. Cette dernière meten avant le fait que deux actionnements en apparence très proches peuvent avoir des compor-tements très di�érents, comme le montre l'étude sur la force où un déplacement de l'actionneurde 10% de la longueur peut diminuer la force maximale requise de 35%. Ceci permet d'envisagerl'actionnement de structures bistables, qui pour les mêmes performances, auront un actionneurplus compact, permettant de réduire l'encombrement et le volume des systèmes bistables.
Di�érents cas d'actionnements ont été présentés, le cas de la force localisée en tout premier,mais aussi le cas des moments localisés et répartis. Ainsi nous présentons une étude générique etpolyvalente qui permet de calculer le comportement dans le cas d'un actionnement par moments,qui n'existait pas dans la littérature.
Pour valider ces calculs, nous avons réalisé plusieurs bancs de test. Notamment, un bancde test très précis nous a permis de valider le cas de l'actionnement par force ponctuelle. Lesrésultats théoriques concordent avec les résultats expérimentaux, à l'exception de phénomènesd'hystérésis qu'on ne sait pas expliquer totalement aujourd'hui. Nous avons apporté un élémentde réponse avec des imperfections de montage, mais qui n'expliquent pas tout ou au moins paspourquoi l'amplitude d'hystérésis est si grande.
Pour mieux comprendre les phénomènes d'hystérésis, nous avons fait une campagne de testsexpérimentaux, en utilisant une caméra rapide. Nous avons ainsi obtenu des chronographes quasi-statiques et dynamiques. Nous avons mis en évidence l'existence de trois phénomènes successifs àtrois vitesse di�érentes, un comportement quasi-statique à vitesse normale, un phénomène ultra-rapide de basculement et en�n des vibrations à vitesse rapide. Le deuxième phénomène entraînedes ondes de déformations qui semblent créer une fatigue prématurée du système, que nous avonsmis en rapport avec une dégradation rapide des poutres bistables.
En�n, nous nous sommes intéressés à l'actionnement de ces structures par des matériauxactifs, en prenant pour objectifs les besoins pour une interface sensorielle à exploration digitale.Un premier test avec un actionnement par alliage à mémoire de forme a été concluant. Nousavons aussi testé des �bres macro-composites et des polymères électro-actifs.

150 Conclusion
Perspectives
Une investigation plus poussée sur les phénomènes d'hystérésis pourrait compléter nos tra-vaux. Nous n'avons pas apporté de réponse complète à ce jour. Nous avions souhaité faire unecomparaison de nos structures en acier inoxydable avec d'autres strucutures proches en silicium,mais nous ne pouvions pas les fabriquer et n'avons pas eu le temps de mettre en place descoopérations avec d'autres laboratoires pour obtenir des prototypes et refaire des tests.
Un dernier point est qu'on a vu apparaître diverses publications au cours de cette thèseparlant du même sujet. Nous voudrions utiliser ou faire utiliser nos modèles pour un meilleurdimensionnement de ces structures, puisque nous avons apporté une méthode qui semble man-quer dans la littérature actuelle, par exemple pour un bistable par composite métal-polymèreionique [44] ou des bistables de dimensions nanométriques [13]. Dans ce dernier cas, il aurait fallufaire les calculs en force réparties. Nous avons mis en place toutes les équations et la méthodede calcul pour ce cas, mais sans le développer. On peut constater dans la littérature récente il ya un réel besoin pour de tels modèles.

Bibliographie
[1] SABIC Innovative Plastics' (anciennement General Electric Plastics). http://www.
sabic-ip.com/gep/Plastics/en/ProductsAndServices/ProductLine/lexan.html.
[2] M.S. Baker and L.L. Howell. On-chip actuation of an in-plane compliant bistable microme-chanism. Journal of Microelectromechanical Systems, 11(5) :566�573, 2002.
[3] Y. Bar-Cohen, T. Xue, M. Shahinpoor, J. Simpson, and J. Smith. Flexible, low-mass ro-botic arm actuated by electroactive polymers and operated equivalently to human arm andhand. In Proceedings of the 3rd Conference and Exposition/Demonstration on Robotics forChallenging Environments (Robotics 98), Albuquerque, New Mexico, April 26-30 1998.
[4] Y. Bellouard. Conception de dispositifs en alliage à mémoire de forme en microtechnique.PhD thesis, Thèse EPFL, no 2308, 2000.
[5] Y. Bellouard and R. Clavel. Shape memory alloy �exures. Materials Science and EngineeringA, 378 :210�215, 2004.
[6] M. Benali-Khoudja, M. Hafez, and A. Kheddar. Vital : An electromagnetic integrated tactiledisplay. Displays, 28 :133 ?144, 2007.
[7] P. Bernardoni. Outils et méthodes de conceptions de structures mécaniques à déformationsréparties et actionnement discret - Applications en micro-robotique. PhD thesis, UniversitéPierre et Marie Curie, 2004.
[8] M. P. Brenner, J. Lang, J. Li, J. Qiu, and A. Slocum. Optimal design of a bistable switch.Proc. Natl. Acad. Sci, 100(17), 9663-9667, 2003.
[9] J. Casals-Terre and A. Shkel. Dynamic analysis of a snap-action micromechanism. In IEEESensors, pages 1245�1248, Vienna, Austria, October 2004.
[10] P. Cazottes, A. Fernandes, J. Pouget, and M. Hafez. Optimisation de mécanismes bistables :structures et actionneurs. In 18ème Congrès Français de Mécanique (CFM'07), Grenoble,France, 27-31 Aug. 2007.
[11] P. Cazottes, A. Fernandes, J. Pouget, and M. Hafez. Actuation of bistable buckled beamswith macro-�ber composites. In Proceedings of the IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS'08), Nice, France, 22-26 Sept. 2008.
[12] B. Charlot, W.Sun, K.Yamashita, H.Fujita, and H.Toshiyoshi. In-plane bistable nanowirefor memory devices. In Proceedings of the DTIP of Mems & Moems 2008, 9-11 April 2008.
[13] B. Charlot, K. Yamashita, W.Sun, H.Fujita, and H.Toshiyoshi. Bistable nanowire for mi-cromechanical memory. Journal of Micromechanics and Microengineering, 18, 2008.
[14] Q. Chen, Y. Haddab, and P. Lutz. Digital microrobotics based on bistable modules : Designof compliant bistable structures. In Proceedings fo the IEEE/ASME International Confe-rence on Mechatronic and Embedded Systems and Applications, IEEE/ASME MESA'08,Chine, 2008.
[15] B.B. Cherry, L.L. Howell, and B.D. Jensen. Evaluating three-dimensional e�ects on thebehavior of compliant bistable micromechanisms. J. Micromech. Microeng., 18, 2008.
152 BIBLIOGRAPHIE
[16] Bureau de la sécurité des transports du Canada (BST). Rapport d'enquête sur un accidentferroviaire, déraillement en voie principale du train q-120-31-30 exploité par le canadiennational au point milliaire 46,0 de la subdivision drummondville à villeroy (québec) le 30juillet 2003. Rapport numéro R03Q0036.
[17] Noliac A/S Denmark. http://www.noliac.com/.
[18] C.G. Diaconu, P.M. Weaver, and F. Mattioni. Concepts for morphing airfoil sections usingbi-stable laminated composite structures. Thin-Walled Structures, 46 :689�701, 2008.
[19] G. Fleury, S. Drapier, and R. Fortunier et P.-L. Charvet. Modélisation analytique et paréléments �nis de la bistabilité d'une poutre �ambée pour applications microsystèmes. In17ieme congrès français de mécanique, Troyes, Septembre 2005.
[20] D.A. Galletly. Modelling the Equilibrium and Stability of Slit Tubes. PhD thesis, Universityof Cambridge, 2002.
[21] D.A. Galletly and S.D. Guest. Bistable composite slit tubes. ii. a shell model. In Interna-tional Journal of Solids and Structures 41, volume 41, pages 4503�4516, 2004.
[22] G. Giannopoulos, J. Monreal, and J. Vantomme. Snap-through buckling behavior of pie-zoelectric bimorph beams : I. analytical and numerical modeling. Smart Mater. Struct.,16 :1148�1157, 2007.
[23] G. Giannopoulos, J. Monreal, and J. Vantomme. Snap-through buckling behavior of piezoe-lectric bimorph beams : Ii. experimental veri�cation. Smart Mater. Struct., 16 :1158�1163,2007.
[24] P. Giddings, C.R.Bowen, and H.A. Kim. Edge to thickness ratio as a predictor of curedshape and load-de�ection characteristics in cross-ply asymmetric composite laminates. In3rd CIMTEC conference on smart materials, Acireale, Sicily, Italy, june 8 to 13 2008.
[25] R.B. Gorbet. Control of Hysteretic Systems with Preisach Representations. PhD thesis,University of Waterloo, 1997.
[26] R.B. Gorbet and K.A.Morris. Closed-loop position control of preisach hystereses. Journalof Intelligent Material Systems and Structures, 14 (8) :483�495, 2003.
[27] M. Hafez, M.D. Lichter, and S. Dubowski. Optimized binary modular recon�gurable roboticdevices. IEEE/ASME Transactions on Mechatronics, 3(1) :18�25, March 2003.
[28] L.L. Howell. Compliant Mechanisms. 2001.
[29] Physical Instruments. http://www.physical-instruments.fr/.
[30] Physik Intrumente. http://www.physikintrumente.com/.
[31] B.D. Jensen, L.L. Howell, and L.G.Salmon. Design of two-link, in-plane, bistable compliantmicro-mechanisms. Journal of Mechanical Design, Transaction of the ASME, 121, 416-419,1999.
[32] R.S. Johansson. Human tactile sensory mechanisms - with reference to object orientedactions. IEEE-RAS & IFFR Haptic Summer school, 25 Septembre 2006.
[33] Qingquan Liu and Qing-An Huang. Micro-electro-mechanical digital-to-analog converterbased on a novel bimorph thermal actuator. IEEE Sensors, 2 :1036�1041, 2002.
[34] J. Luk, J. Pasquero, S. Little, K. MacLean, V. Lévesque, and V. Hayward. A role forhaptics in mobile interaction : Initial design using a handheld tactile display prototype.In Proceedings of ACM Conference on Human Factors in Computing Systems (CHI '06),Montreal, Canada, April 22-27 2006.
[35] N.D. Masters and L.L. Howell. A self-retracting fully compliant bistable micromechanism.Journal of Microelectromechanical Systems, 12(3) :273�280, June 2003.
Bibliographie 153
[36] Smart Materials. http://www.smart-materials.com/.
[37] F. Mattioni, A. Gatto, P.M. Weaver, M.I. Friswell, and K.D. Potter. The applicationof residual stress tailoring of snap-through composites for variable sweep wings. In 47thAIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Confe-rence AIAA 2006-1972, Newport, Rhode Island, 1- 4 May 2006.
[38] C. Maurini, J. Pouget, and S. Vidoli. Distributed piezoelectric actuation of a bistable buckledbeam. European Journal of Mechanics - A/Solids, 26 (5) :837�853, 2007.
[39] A.D. Norman, K.A. Se�en, and S.D. Guest. Multistable textured shell structures. In 3rdCIMTEC conference on smart materials, Acireale, Sicily, Italy, june 8 to 13 2008.
[40] P. Patrício, M. Adda-Bedia, and M. Ben Amar. An elastica problem : instabilities of anelastic arch. Phys. D, 124(1-3) :285�295, 1998.
[41] J. Qiu. An Electrothermally-Actuated Bistable MEMS Relay for Power Applications. PhDthesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, 2003.
[42] J. Qiu, J.H. Lang, and A.H. Slocum. A curved-beam bistable mechanism. Journal ofMicroelectromechanical Systems, 13(2), 137-146, 2004.
[43] B. Roman. De l'elastica aux plaques plissées. PhD thesis, Université de provence Aix-Marseille I, 2000.
[44] J. Rossiter, B. Stoimenov, and T. Mukai. A self-switching bistable arti�cial muscle actuator.In SICE-ICASE International Joint Conference 2006, Oct. 18-21 in Bexco, Busan, Korea,2006.
[45] T. Schiloer and S. Pellegrino. Multi-con�guration space frames. In Structures, StructuralDynamics and Materials Conference, AIAA 2004-1529, 19-22 April 2004.
[46] M. Shahinpoor, Y. Bar-Cohen, J.O. Simpson, and J. Smith. Ionic polymer-metal composites(ipmcs) as biomimetic sensors, actuators and arti�cial muscles - a review. Smart Materialsand structures, 7, 15-30, 1998.
[47] N.Q. Son. Stabilité des structures élastiques. Collection : Mathématiques et Applications ,Vol. 18, 1995, XIV.
[48] Dynamic Structures. http://www.dynamic-structures.com/.
[49] W. Bergmann Tiest. Haptic psychophysics. IEEE-RAS & IFFR Haptic Summer school, 25Septembre 2006.
[50] S.P. Timoshenko and J.M. Gere. Theory of elastic stability. McGraw-Hill, 2nd edition, 1961.
[51] H. Toshiyoshi, D. Kobayashi, M. Mita, G. Hashiguchi, H. Fujita, J. Endo, and Y. Wada. Mi-croelectromechanical digital-to-analog converters of displacement for step motion actuators.Journal of microelectromechanical systems, 9 (2) :218�225, 2000.
[52] W. Y. Tseng and J. Dugundji. Nonlinear vibrations of a buckled beam under harmonicexcitation. ASME Journal of Applied Mechanics, 38, 467-476, 1971.
[53] Laboratoire de Physico-chimie des Polymères et des Interfaces Université de Cergy-Pontoise.http://www.u-cergy.fr/lppi/spip.php?article41.
[54] M. Vangbo. An analytical analysis of a compressed bistable buckled beam. Sensors andActuators, 69, 212-216, 1998.
[55] M. Vangbo and Y. Bäklund. A lateral symmetrically bistable buckled beam. Journal ofMicromechanics and Microengineering, 8, 29-32, 1998.
[56] W. Keats Wilkie, Robert G. Bryant, James W. High, Robert L. Fox, Bruce D. Little, Paul H.Mirick, Richard F. Hellbaum, and Anthony Jalink. Nasa-langley research center macro-�bercomposite actuator (larc-mfc) : Technical overview.
[57] R. Yeh, R.A. Conant, and K.S.J. Pister. Mechanical digital-to-analog converters.

154 Bibliographie
Annexes


Annexe A
Haptique et interfaces sensoriellesdigitales
A.1 Qu'est ce que l'haptique ?
L'haptique fait partie des sens impliqués dans le besoin de perception de notre corps dansson environnement. C'est un terme qui a été apporté récemment pour désigner la science quiétudie ce qui a trait au toucher et à la perception géométrique et mécanique. C'est plus completque science du toucher, pour la raison suivante.
Lorsqu'on souhaite réaliser une tâche quelconque, par exemple pour écrire avec un stylo, il ya plusieurs niveaux de perception qui vont nous permettre de nous repérer.
Le premier est la perception, complètement interne, de la con�guration � corporelle �. Ainsi,même les yeux fermés, même sans être au contact avec aucune surface, je peux savoir si monbras est détendu, s'il est plié. Je peux savoir si je suis assis ou debout. Je peux aussi savoir sij'applique une force sans contact. C'est important par exemple lors de la natation, où le contactest réparti et pourtant je dois savoir si je force mes muscles ou non. Je sais aussi si comment estorienté mon stylo. On notera que cette orientation est faite dans un repère haptique et non dansun repère géographique [49].
Une autre perception est cutanée. Lorsque j'écris, je ressens les petites vibrations du stylo.Lorsque je marche sur un sol ondulé, je ressens la forme de la surface sur laquelle je marche.Lorsque je touche une surface, je ressens sa rugosité. C'est ici une information de contact. Elleest perçue majoritairement par la peau. C'est littéralement le sens du toucher, on ressent uneinformation sur ce que l'on touche.
Cette distinction, qui s'explique en terme de position des capteurs, dans les muscles pour lescapteurs de con�guration, dans la peau pour les capteurs cutanés, n'est pas très pertinente d'unpoint de vue de la perception. En e�et, tous les e�ets sont combinés. Pour preuve, on va perdrenotre e�cacité à manipuler (en pratique en mettant plus de temps) si on manipule des objetssans la perception cutanée dans des exercices de déplacement d'objets [32]. Pourtant ce sont biendes tests d'orientation, pas de contact.
Notre cerveau réinterprète en permanence des informations très nombreuses, venant des senshaptiques, mais aussi des autres sens. La vision permet de voir la position du stylo et nouspermet de recalibrer sa position. On ne peut pas écrire sans le toucher, mais sans vision on nesait plus exactement où on est après quelques mots. De même, les sons donnent une informationde position, on se rapproche d'une source sonore, on tape sur un obstacle. . .
C'est ici le but des interfaces sensorielles. On cherche à transmettre une information à pro-pos de notre environnement via les sens humains. Cette information est interprétée à partie demultiples canaux, les cinq sens en général. Cependant, la notion d'haptique permet d'indiquer

2 Annexe A : Haptique et interfaces sensorielles digitales
qu'en plus du sens du toucher, on utilise une perception interne de notre corps, qui n'est pasdirectement liée au contact avec notre environnement (pas besoin de toucher).
A.2 Objectifs des interfaces haptiques
L'objectif des interfaces haptiques est, comme pour les interfaces sensorielles dont elles fontpartie, de transmettre une information. Cette information utilise les sens attribués au toucher.On va vouloir recréer un environnement, donner une perception virtuelle similaire à celle qu'onaurait ressenti dans la réalité, comme par exemple pour des simulateurs de vol.
Bien que la plupart des interfaces se veulent maintenant multimodales, on va séparer ledomaine de l'haptique des autres, car ils font appel à des savoirs très di�érents.
L'auditif est du domaine de la science du son, très maîtrisé maintenant avec les chaînes Hi-�.Le but d'une chaîne Hi-� est dans notre optique de restituer un message sonore prédéterminé viaun mécanisme de création sonore synthétique.
La vision est un des moyens les plus connus. L'a�chage par écran en fait un moyen trèssimple à utiliser.
L'odorat est du domaine de la parfumerie. Le goût celui de la cuisine.Reste le toucher, qui couvre une grande partie de l'haptique mais aussi la perception ther-
mique. L'haptique est aujourd'hui en plein essor. Parce qu'on doit exciter à la base des récepteursbiomécaniques, c'est un domaine très souvent abordé par des mécatroniciens.
L'homme réinterprète les informations provenant d'une myriade de petits capteurs placéspartout dans son corps pour en faire une information simple. De ce fait, il dégrade l'information.Pour ce, il utilise des mécanismes d'accoutumance. On �nit pas savoir que tel type de viscositéprovient de tel �uide qu'on utilise couramment par exemple. Il est possible de simuler une in-formation par une autre, que le cerveau ne pourra pas di�érencier. C'est le principe de l'illusionhaptique, qui montre aussi qu'il n'est pas nécessaire de chercher à mimer au mieux la nature.On peut aussi utiliser le son pour simuler une information de toucher, comme on le fait avecles systèmes portatifs tels les téléphones portables. C'est encourageant car ceci signi�e qu'onn'est pas obligé d'avoir à tout moment des mécanismes haptiques capables d'exciter les capteurshumains, très performants, mais parfois de simples équivalents su�sent.
A.3 Capteurs de la peau
La peau est équipée de di�érents capteurs. On peut les classer en plusieurs catégories, enfonction de la précision et de la sensibilité, statique et dynamique (cf. Fig. A.1 et Fig. A.2,selon [32]).
Le point intéressant est que la nature, pour nous o�rir la meilleure perception possible, adoté notre corps de di�érents capteurs que l'on peut quali�er de spécialisés. C'est justement ladi�culté pour la réalisation d'interfaces sensorielles. Comment créer un système contrôlable quisoit capable d'exciter des capteurs sur toute la gamme de performance de ceux-ci ?
On peut considérer qu'il est préférable de s'orienter vers di�érentes interfaces, spécialisées.Des interfaces tactiles dynamiques, tel le VITAL [6], développé au CEA List, permettent d'exciterdynamiquement la peau, transmettant ainsi une information que l'on quali�erait de vibratoire.Ensuite, il faut utiliser des interfaces tactiles quasi-statiques séparées, pour transmettre desinformations statiques. C'est ce type d'interface qui est visée par cette thèse.
Le point de départ est l'usage de surfaces déformables, pavées d'une multitude de petitséléments qui vont chacun pouvoir exciter un capteur biologique. On crée des briques de basesconstituées de petits picots amovibles (comme en Fig. A.3), que l'on reproduit sur une surfaceplane. L'utilisateur de l'interface passe alors sa main sur cette surface et ressent une information.
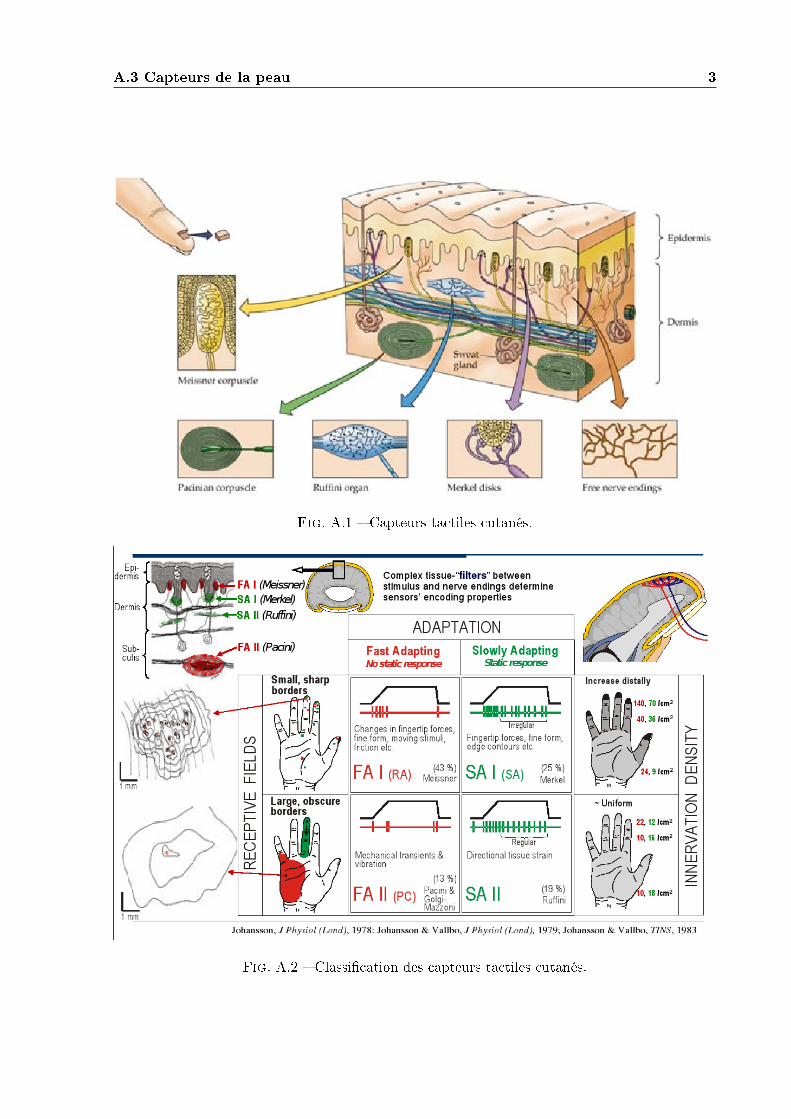
A.3 Capteurs de la peau 3
Fig. A.1 � Capteurs tactiles cutanés.
Fig. A.2 � Classi�cation des capteurs tactiles cutanés.

4 Annexe A : Haptique et interfaces sensorielles digitales
Fig. A.3 � Principe de module élémentaire d'une interface haptique.
C'est pour les interfaces statiques qu'on souhaite utiliser des mécanismes bistables. Pour detelles interfaces, les mécanismes bistables permettent de maintenir une position d'un picot, hautou bas, sans consommation d'énergie. De plus, on limite énormément le besoin en contrôle deposition, alors que des interfaces tactiles peuvent contenir rapidement plusieurs centaines de telspicots. Ceci permet de simpli�er au maximum ces interfaces.
A.4 Intervalles de perception
Pour pouvoir concevoir ces surfaces tactiles, il faut être capable de connaître la taille dechaque bloc élémentaire. Ainsi, comme on veut se mettre en face de capteurs biologiques, ondoit savoir quelle surface chaque capteur couvre. On utilise l'expérience des deux pointes. Onva appuyer sur la peau humaine avec deux pointes comme représenté en Fig. A.4. Ensuite ondemande au cobaye s'il ressent deux pointes séparées. Si oui, on les rapproche jusqu'au momentoù il n'en perçoit qu'une. Cette expérience simple est réputée permettre de connaître la distanceminimale que l'on peut ressentir.
Avec ce test, on obtient des distances très di�érentes en fonction du point d'application surle corps. La plus faible distance est obtenue pour l'index. C'est d'ailleurs celui-ci qu'on utilisenaturellement pour évaluer au toucher une surface. On retrouve avec une méthode systématiqueun résultat connu, ce qui montre le bien-fondé de cette démarche.
On détermine ainsi que si on veut une sensibilité maximum de l'utilisateur, et par conséquenceune capacité de transmission optimale d'information tactile à celui-ci, il faut lui faire utiliser sonindex. Reste à évaluer le besoin en force et en déplacement pour ce doigt. Malheureusement,ceci va dépendre du type de la vitesse. Un mécanisme vibrant aura besoin de peu de force etde déplacement. Un mécanisme statique aura besoin, pour une inter-distance de 1mm, de prèsde 200µm de déplacement vertical et d'une force de l'ordre de 300mN. Ceci correspond à uneénergie volumique énorme. On obtient une énergie surfacique de 60 J/m2, qui si on utilise 1mmd'épaisseur (en étant très généreux) nous donne une énergie volumique brute de 6 105 J/m3.
A.5 Les interfaces sensorielles, technologie et réalisation
Pour la réalisation de telles interfaces haptiques, nous avons besoin d'une conception quiautorise une fabrication en grande quantité de modules tactiles élémentaires. De plus, on veutleur associer un mécanisme bistable. Il n'est pas question de créer un petit élément tactile,puis de le combiner avec tous ses voisins pour créer une surface tactile. Si on veut une résolutionmillimétrique, il nous faudra par exemple déjà 400 éléments pour une surface active de 20 x 20mm.

A.5 Les interfaces sensorielles, technologie et réalisation 5
Fig. A.4 � Test avec deux pointes. On veut déterminer la distance minimale d'écartement per-ceptible par la peau humaine à di�érents endroits.
Et ce n'est qu'une très petite surface.
(a) conception en couches (b) conception en tranche
Fig. A.5 � Familles de conception pour une interfaces tactile.
Aussi, on doit étudier une méthode de fabrication limitant les opérations ultérieures. Unesolution est présentée en Fig. A.5(a). Dans ce cas, l'outil vient découper des éléments en étantaligné avec la direction de déplacement, et vertical aux panneaux superposés. C'est une concep-tion en couche, dans le sens où l'utilisateur a l'impression de voir un système composé de couchesmécaniques. La di�culté est de créer un mécanisme bistable en découpant par le dessus.
Une alternative est d'utiliser cette fois-ci des tranches, comme en Fig. A.5(b). Cette fois-ci,le mécanisme est créé en découpant sur le coté. C'est plus simple d'un point de vue fabrication,puisqu'on a un meilleur accès au mécanisme, mais plus simple pour l'assemblage, puisqu'on doit

6 Annexe A : Haptique et interfaces sensorielles digitales
ensuite assembler autant de tranches qu'on veut de lignes dans notre a�chage tactile.Ces deux conceptions ne se ressemblent pas. Au niveau théorique, la conception en couche
semble préférable, car intrinsèquement plus e�cace. Cependant, on constate que suite aux possi-bilités o�ertes par des conceptions en tranche, on obtient aujourd'hui de meilleurs résultats aveccelles-ci, comme pour le peigne piézoélectrique de Hayward et al. [34], en Fig. A.6(a) ou la cellulebraille, en Fig. A.6(b). Il reste qu'on se limite souvent dans ce cas à peu de lignes, même si on abeaucoup de colonnes. Les conceptions en couche permettent des mécanismes carrés, donc avecune bonne homogénéité entre largeur des lignes et des colonnes (comme le VITAL). Cependant,les motifs tactiles sont individuellement moins performants.
(a) ipod tactile [34] (b) cellule braille
Fig. A.6 � Deux exemples d'a�cheurs tactiles fonctionnels, peigne piézoélectrique et a�cheurbraille. Ils sont tous deux dérivés d'une conception en tranche.
A.6 Conception objectif retenue
Fig. A.7 � Schéma de principe de plaque matricée d'éléments bistables, tel que retenu ici.
L'objectif à long terme est la création de panneaux d'interfaces sensorielles, matricés d'élé-ments bistables à faible coût. Un tel type de panneau est représenté en Fig. A.7 (coupé entranche). Ceci permettrait de réaliser des interfaces sensorielles matricielles avec une conceptionen couches.
La question se pose pour la fabrication d'un tel panneau, qui a des formes peu communes.L'idée serait de créer de nombreuses zones bistables, basées sur des poutres �ambées. Commec'est une conception en couches, l'outil doit former la pièce en utilisant la direction orthogonaleau panneau. Une solution est d'utiliser une fabrication par électroérosion, mais cette solution estchère.
Une autre solution, plus viable, est de matricer une feuille d'acier, comme représenté enFig. A.8, puis de la recuire. On obtient alors d'un seul coup d'outil une matrice d'élémentsbistables (des découpes peuvent être nécessaire, ainsi qu'un recuit).

A.6 Conception objectif retenue 7
Fig. A.8 � Principe de matriçage de la plaque.
Ce type de fabrication impose une surface régulière, puisque issue d'une feuille d'acier plate.On s'orienterait alors vers des déformations réparties, ce qui est de toute façon préférable enterme de durée de vie. Il reste à savoir comment actionner un tel système.

8 Annexe A : Haptique et interfaces sensorielles digitales

Annexe B
Actionnement par actionneur en alliageà mémoire de forme
Nous présentons dans cette partie le banc de test AMF que nous avons réalisé. Il s'agit d'éva-luer la possibilité d'utiliser un actionnement par alliage à mémoire de forme. Le dimensionnementde l'actionneur n'utilise pas la méthode de résolution présentée au cours de cette thèse, aussi cetravail n'est pas présenté avec le corps de ce manuscript.
B.1 Le montage
La première idée que nous avons suivie est d'utiliser le matériau AMF sous une forme de lame,dont on se servirait à la fois comme structure et actionneur. Ensuite, di�érentes zones seraientéduquées, actionnables séparément permettant de faire basculer le mécanisme dans un sens oudans l'autre. Cependant, un matériau AMF, s'il est très rigide dans sa forme austénitique, sera encomparaison mou sous sa forme martensitique, puisque son module de Young chute d'un facteurde l'ordre de 5. Ainsi, un tel concept sera certainement très souple sous sa forme non actionnée(froide).
La seconde idée a été de coller un alliage à mémoire de forme sur la surface d'une poutrebistable. Cette poutre, qui serait réalisée en matériau élastique, servirait de structure et garderaitses qualités mécaniques à froid. L'AMF lui permettrait le basculement, en créant un momentréparti le long de la structure, un peu comme dans le cas de l'actionnement par �bre macro-composite du chapitre 4. On pourrait apposer cette couche super�cielle AMF par exemple enfaisant un dépot de matière le long de la structure, ou en collant celui-ci. Nous avons essayé decoller un AMF le long d'une structure, éduqué pour se contracter lors de la chau�e. Cependant,le collage n'a pas tenu, du fait de la haute température (on se rapproche de la températurede vitri�cation de la colle) et surtout de la déformation linéaire de l'AMF, qui se contracte deplusieurs pourcents.
Un autre problème de ces deux montages est dû à la di�usion thermique. L'AMF sera chau�épour se déformer, mais cette chaleur va se di�user et peut chau�er des parties voisines parconduction, y compris d'autres zones actives. Il est di�cile d'isoler thermiquement l'actionneurde sa structure.
Nous nous sommes alors orientés vers un montage où l'AMF est complètement séparé de sastructure. L'idée est d'utiliser une plaque AMF séparée de la structure, qui va venir appuyersur celle-ci pour la faire basculer. L'AMF étant éduqué en simple sens, deux actionneurs sontnécessaires pour obtenir un basculement pilotable dans les deux sens, selon le principe de laFig. B.1.

10 Annexe B : Actionnement par AMF
Fig. B.1 � Schéma d'actionnement par deux actionneurs AMF externes. Chaque actionneur sertà actionner dans un sens.
L'éducation doit permettre d'avoir une déformation éduquée constante le long de la structure,un y′′ constant dans les coordonnées curvilignes. Ceci conduit à avoir une forme de lame AMFéduquée circulaire, comme montré en Fig. B.2. C'est ce type de forme d'AMF qui doit êtreutilisée pour notre montage.
F
M,y
x0
xy
(a)
(b)
(c)
Fig. B.2 � Éducation de l'actionneur AMF. Une forme circulaire à chaud est utilisée (en a), uneforme droite à froid (en b), ce qui permet d'avoir des contraintes homogènes, le moment interneétant constant le long de l'actionneur (en c).
Un montage a été réalisé en utilisant un étau mécanique. Un seul actionneur AMF a été utilisé,le système est donc un montage simple-sens, le retour se faisant manuellement. En remplaçant lesmors par deux pièces d'adaptations spéci�ques, nous avons obtenu une base rigide pouvant êtrepilotée en déplacement horizontal, autrement dit ceci nous permet de modi�er la précompressionselon les besoins. On montre en Fig. B.3 ce montage.
Les dimensions utilisées sont une longueur de 101mm, un largeur de 20mm, une épaisseur de0,4mm. La lame structurelle est en acier inoxydable de module de Young 178,5GPa. Nous avonsappliqué à ce système un raccourcissement de 2% de la longueur de la poutre, via la vis de l'étau.La lame AMF fait 1mm d'épaisseur, elle a la même largeur que la lame inox mais sa longueurreprésente 40% de la longueur du bistable (hors encastrement). Elle est en alliage Nickel-Titane,avec une température de transformation de 60°C.

B.2 Dimensionnement par énergie volumique 11
Fig. B.3 � Montage du banc de test AMF, ici vu de coté.
Ce montage nous a donné entière satisfaction puisqu'il permet le basculement par chau�e del'AMF. Cependant, comme tout actionnement AMF, le temps de réponse est élevé, car il fautélever la température de l'actionneur de plusieurs dizaines de degrés.
B.2 Dimensionnement par énergie volumique
Bien que le système du banc de test ait fonctionné du premier coup, nous avons réaliséun calcul de dimensionnement pour celui-ci. C'est ainsi un dimensionnement a posteriori. Nousavons utilisé ici un dimensionnement par énergie volumique, comme introduit en section 1.4.4.Comme les dimensions sont choisies de sorte que la lame AMF appuie à 40% de la longeur de lalame bistable et que les largeurs sont identiques, il ne reste qu'à déterminer l'épaisseur d'AMFnécessaire.
Dans notre cas, l'AMF est plus court que le système (il appuie à 40%), d'où une perte delongueur de 0,4. On utilise une déformation plus faible que celle donnée, soit environ 1%, cequi nous fait baisser l'énergie volumique d'un facteur 2,5. L'e�cacité de ce montage est de 60%environ (cf. le chapitre 2.5.4 et tout particulièrement la Fig. 2.46(b)). L'usage en � bender � faitdiminuer l'e�cacité du montage d'un facteur 2. Aussi, une fois multiplié ces coe�cients, on aune e�cacité de montage de 0,048. Le rapport d'énergies volumiques actionneur/structure estd'environ 8, soit au �nal un rapport 2,6 entre les volumes linéaires de l'AMF et de la structure. Laprofondeur étant la même pour la structure et l'actionneur, on doit avoir une épaisseur d'AMFde 2,6 fois celle de la structure, ce qui est presque le cas (l'épaisseur de l'AMF est de 1mm etcelle de la structure de 0,4mm). Ceci montre que l'actionneur est bien dimensionné en volume.
Par ailleurs, la course obtenue par l'AMF correspondait à celle nécessaire. Nous n'avons doncpas besoin d'un système de démultiplication. Après quelques cycles d'utilisation, l'AMF revientà sa position initiale. Il s'autoéduque double sens, une propriété très particulière des AMF. Onobtient cette propriété pour des déformations de moins de 1%, c'est pour cette raison que nousavons retenu une déformation maximale de 1% et non de 2,5%. Ainsi, l'actionneur est égalementbien dimensionné en course et déplacement.
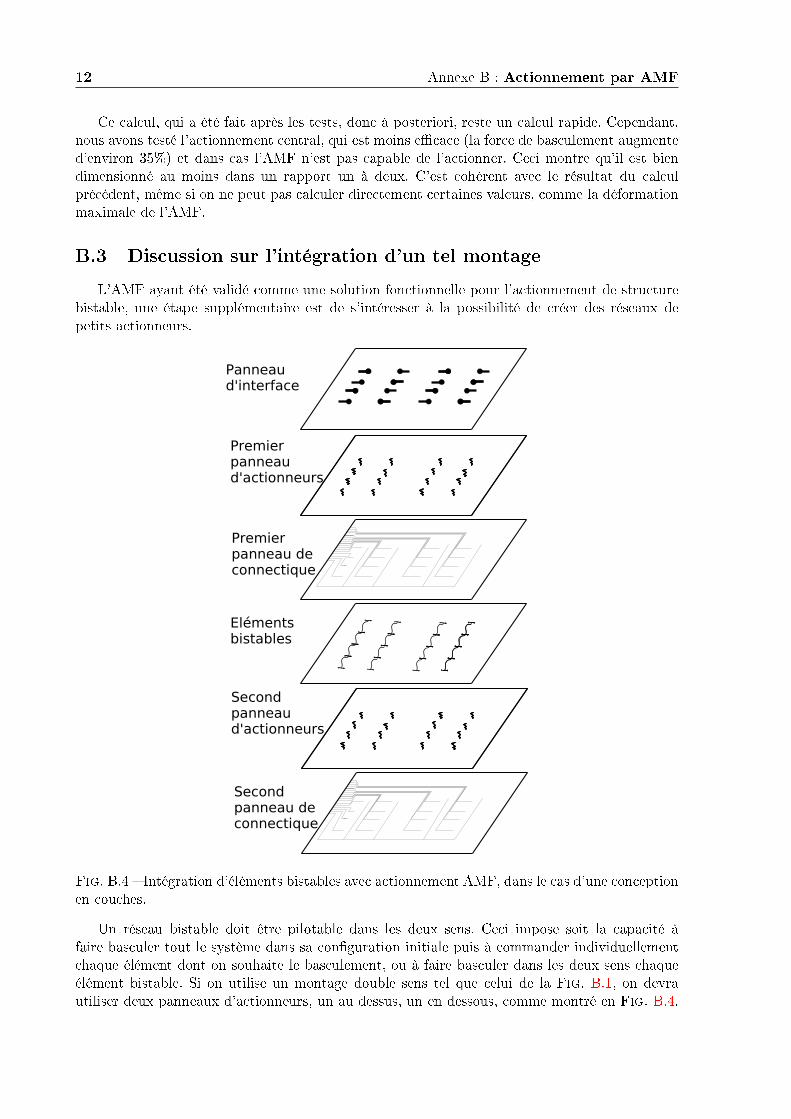
12 Annexe B : Actionnement par AMF
Ce calcul, qui a été fait après les tests, donc à posteriori, reste un calcul rapide. Cependant,nous avons testé l'actionnement central, qui est moins e�cace (la force de basculement augmented'environ 35%) et dans cas l'AMF n'est pas capable de l'actionner. Ceci montre qu'il est biendimensionné au moins dans un rapport un à deux. C'est cohérent avec le résultat du calculprécédent, même si on ne peut pas calculer directement certaines valeurs, comme la déformationmaximale de l'AMF.
B.3 Discussion sur l'intégration d'un tel montage
L'AMF ayant été validé comme une solution fonctionnelle pour l'actionnement de structurebistable, une étape supplémentaire est de s'intéresser à la possibilité de créer des réseaux depetits actionneurs.
Panneau d'interface
Premier panneau d'actionneurs
Premier panneau de connectique
Elémentsbistables
Second panneaud'actionneurs
Secondpanneau deconnectique
Fig. B.4 � Intégration d'éléments bistables avec actionnement AMF, dans le cas d'une conceptionen couches.
Un réseau bistable doit être pilotable dans les deux sens. Ceci impose soit la capacité àfaire basculer tout le système dans sa con�guration initiale puis à commander individuellementchaque élément dont on souhaite le basculement, ou à faire basculer dans les deux sens chaqueélément bistable. Si on utilise un montage double sens tel que celui de la Fig. B.1, on devrautiliser deux panneaux d'actionneurs, un au dessus, un en dessous, comme montré en Fig. B.4.

B.4 Conclusion 13
A ceux-ci s'ajoutera le cablâge permettant d'alimenter chaque actionneur. Si on se contente d'unactionnement simple sens avec retour en position initiale forcé par un système externe, ce schémasera légèrement simpli�é.
L'alimentation de l'AMF constitue ici l'obstacle majeur. Un tel type de montage sera trèsdi�cile à alimenter, il faut chau�er des zones très petites sans chau�er les zones environnantes.Un problème associé est le refroidissement, très délicat dans des zones aussi con�nées. Le trèsfaible rendement des AMF, de l'ordre du pourcent, fait qu'un tel système va nécessairementfortement chau�er. Il sera même délicat d'apporter de l'énergie localement par électricité, lecâblage risquant lui-même de chau�er.
B.4 Conclusion
Dans le cadre de la réalisation de matrice d'éléments bistables pilotés, nous avons écarté cettesolution d'actionnement pour des raisons d'échau�ement. Il n'en reste pas moins que des résultatstrès convaincants sont obtenus avec un élément bistable isolé. Les avantages et inconvénientsdes AMF ressortent immédiatement ici, très forte énergie volumique disponible, mais aussi desproblèmes d'échau�ement et d'alimentation. Un actionneur non-thermique, au mieux électrique,est souhaitable pour des systèmes si complexes.

14 Annexe B : Actionnement par AMF
Annexe C
Utilisation de polymères électro-actifspour l'actionnement de mécanismesbistables
Dans cette partie, nous détaillons les tests que nous avons initiés pour l'usage de polymèresélectro-actifs comme bistables. On en montre un exemple en Fig. C.1. Les EAP sont des maté-riaux très di�érents des MFC. De base, c'est un polymère qui se déforme sous l'e�et mécaniqueinduit par une déformation électro-chimique d'oxydoréduction. C'est donc basiquement un doubletransformateur, d'abord électrochimique, puis chimico-mécanique. Cette particularité est aussison avantage, car les transformations chimiques d'oxydoréduction se font sous une très faibletension, quelques volts.
Le principe du polymère est de contenir des anions et des cations, qui vont se déplacersous l'e�et de la contrainte électrique. Ceci se passe sous la couche électro-conductive, doncest totalement interne à la matière. On pourrait bien sur se ramener au cas de l'extension enconsidérant qu'il s'agit bien de créer dans l'épaisseur des extensions ou des contractions de peau.Cependant, il est plus simple de se contenter d'un modèle de �exion. C'est pour ce but qu'on amis au point un modèle en chapitre 4. Nous modélisons donc l'e�et de l'actionnement comme unmoment réparti.
C.1 Principe d'actionnement par polymères électro-actifs
L'idée ici est d'utiliser le polymère comme structure et actionneur, c'est à dire comme unsystème monolithique. Accoler l'actionneur à une structure impliquerait en e�et une trop granderigidité. On l'encastre ensuite entre deux extrémités �xes pour créer un mécanisme bistable.
On va ensuite activer certaines parties dans un sens, d'autres dans l'autre sens, pour créer unactionnement. On suppose qu'on ne peut pas moduler la tension,et par suite le moment appliquéà la poutre, seule la polarité peut changer. Un tel montage est schématisé en Fig. C.2.
En pratique, multiplier les parties actives augmente la complexité du montage, chacunesd'entre elles devant être alimentées. Le montage avec une seule partie active serait le plus simple,mais il ne permet pas au mécanisme de basculer dans le cas bi-encastré (on notera que ce n'estpas le cas pour un bi-rotulé).
Si on alimente trois parties, on doit alimenter l'une d'elles (la portion centrale) par un couplede �ls qui se baladent (cf. Fig. C.3). Ce n'est pas évident, le montage avec deux portions est deloin le plus simple, les bords pouvant être alimentés par les extrémités. C'est pour ça que nousnous sommes limités à ce dernier montage, montré en Fig. 4.20.
16 Annexe C : Utilisation d'EAP pour l'actionnement de mécanismes bistables
Fig. C.1 � Polymère électroactif brut avant usage. Les extrémités de la brucette donnent uneidée de la taille.
Fig. C.2 � Schéma d'une poutre bistable en EAP auto-actionnée, avec des portions de la surfaceconductives et d'autres non-conductive, créant plusieurs portions d'actionnement.
Fig. C.3 � Schéma d'une poutre bistable en 3 portions. La portion centrale doit être alimentéeavec des �ls qui se baladent. Ce n'est pas évident pour des petites dimensions.
C.2 Montage expérimental pour les polymères électro-actifs
On souhaite réaliser un banc de test qui ressemble à celui schématisé en Fig. C.4. Aussi, onaurait deux parties actives, avec inversion de la polarité d'actionnement entre les deux.
Dans un premier temps, nous avons utilisé un polymère homogène, sans découpe, et nousavons assemblé deux parties distinctes avec un élément intermédiaire, en l'occurrence un adhésif,comme schématisé dans la Fig. C.5.
Ce montage s'est révélé extrêmement di�cile. L'adhésif se colle très mal sur la surface aqueusedu polymère. Elle induit de plus une rigidité monstrueuse. De fait, on a détruit rapidement lepolymère lors des tests.
Le polymère étant fragile, il �ssure très facilement lors du montage. De plus, il ne supportepas une grande compression, ce qui le rend di�cile à �xer. Il a aussi tendance à glisser, étantenduit d'une solution liquide.

C.2 Montage expérimental pour les EAP 17
Fig. C.4 � Principe du montage EAP souhaité. Les ampli�cateurs permettent de réguler latension et d'inverser celle-ci sur les deux portions.
Fig. C.5 � Montage du polymère avec assemblage.
Par la suite, on envisage l'utilisation d'un actionneur avec une découpe de la coupe super�-cielle (comme montré en Fig. C.6), qui permettra de séparer deux zones d'actionnements touten conservant l'homogénéité mécanique du montage. Un exemple de tel polymère est montré enFig. C.7.
Fig. C.6 � Second montage envisagé pour le polymère. Il n'a pas encore été réalisé.

18 Annexe C : Utilisation d'EAP pour l'actionnement de mécanismes bistables
Fig. C.7 � Polymère électroactif avec sa coupure et coupé. A gauche le récipient dans lequel nousgardions le solvant et les EAP.
C.3 Discussion
L'utilisation des polymères électro-actifs semble très intéressante. Ils sont compacts, ré-pondent à des tensions vraiment faibles (alimentation par pile classique possible), et donnentà vide des déformations spectaculaires.
Ces actionneurs sont assez spéci�ques du point de vue de la modélisation. Les modèles sontcomplexes et mélangent comportement chimiques et mécaniques. C'est très di�érent des action-neurs plus � classiques �.
Nous n'avons pas eu le temps de véritablement conclure sur ces actionneurs. Le manque detemps ne nous a pas permis de réaliser des bancs de test complets.


Résumé
Ce document est dédié à l'étude de l'actionnement des structures bistables basées sur despoutres �ambées. De tels systèmes vont pouvoir être utilisés comme micro-interrupteurs ou dansdes interfaces tactiles. L'ajout d'un actionnement par matériau actif, qui est adapté à leur taille,les rend contrôlables. Cependant, de par leur taille et les performances statiques exigées, leurconception et leur fabrication restent délicates. On souhaite apporter grâce à ce travail des outilspour la conception. Trois grandes parties composent ce travail.
Une première partie, théorique, permet de développer un modèle nouveau pour le calcul decomportement de ses structures. Ce modèle est basé sur une analyse du comportement, complétépar une étude sur la topologie de l'actionnement. A partir de ce modèle, on peut obtenir entreautres le comportement quasi-statique de la structure et la chronologie de basculement, ce pourdes actionnements aussi variés qu'une force localisée ou un moment réparti.
Une seconde partie expérimentale lui est adjointe. Elle permet de valider le modèle dans le casde la force localisée, les résultats d'un banc de test ayant été confrontés directement aux résultatsdu modèle. Ensuite, des tests dynamiques permettent de compléter les résultats précédents pourillustrer les comportements transitoires.
En�n, une dernière partie montre les résultats obtenus pour l'actionnement de ces structurespar des matériaux actifs. Dans cette partie, nous avons pu essayer di�érents actionneurs à base dematériaux actifs, des polymères électro-actifs, des alliages à mémoire de forme et des compositesà macro-�bre.
Abstract
In this document, we investigate the actuation of bistable structures based on buckled beam.Such systems can be used as micro-switches or as basic cell of a tactile interface. Adding a smartmaterial based actuator, a fully controlable system can be obtained. However, as these systemsare small-sized and need good performances, their design and fabrication is not very easy. Thiswork is dedicated to provide new design tools for design. It is composed of three main parts.
A �rst part, theoretical, develops a new model for these structures behavior. It is based onan analysis of the behavior, leading to a topological study. Based on this model results, severalactuation scenarios can be led, as a localized force actuation, a torque actuation one. The quasi-static behavior and the switching chronology can be predicted.
A second part shows some experimental results. First is a model validation with the case ofthe localized force actuation test bench, of which results are compared with the model prediction.Then a dynamic study with fast imagery allows to explore the transitional behaviors.
Last, a third part is dedicated to several smart actuator evaluation. Shape memory alloys,macro-�ber composites and electro-active polymers are used and discussed.