A L’ECOUTE DE NOTRE CORPS - odpf.org€¦ · 1 OLYMPIADES DE PHYSIQUE 2013/2014 XXIème édition...
36
1 OLYMPIADES DE PHYSIQUE 2013/2014 XXIème édition A L’ECOUTE DE NOTRE CORPS Projet réalisé par Claire Heinimann, Madeline Fonné, Alexandre Martin Encadrés par Frédéric Martin, Philippe Heinis Lycée JJ Henner, ALTKIRCH
Transcript of A L’ECOUTE DE NOTRE CORPS - odpf.org€¦ · 1 OLYMPIADES DE PHYSIQUE 2013/2014 XXIème édition...
1
OLYMPIADES DE PHYSIQUE 2013/2014
XXIème édition
A L’ECOUTE
DE NOTRE CORPS
Projet réalisé par Claire Heinimann, Madeline Fonné, Alexandre Martin
Encadrés par Frédéric Martin, Philippe Heinis
Lycée JJ Henner, ALTKIRCH

2
3
PLAN
INTRODUCTION
PARTIE A ONDES ULTRASONORES et TRANSDUCTEURS
1) Caractéristiques des transducteurs ultrasonores
a) Fréquence de résonance
b) Directivité
2) Propagation des ultrasons dans différents milieux biologiques
PARTIE B ETUDE MORPHOLOGIQUE : L’ECHOGRAPHIE
1) Atténuation des ondes ultrasonores
2) Réflexion des ultrasons
a) notions d’interface, d’impédance, coefficients de réflexion et de transmission
b) rôle du gel
c) Image des contours des organes
PARTIE C ETUDE FONCTIONNELLE : LE DOPPLER
1) Généralités : l’effet Doppler
2) Expérience : émetteur en mouvement, récepteur fixe
3) Application à la mesure de la vitesse du sang
a) Introduction
b) « Prendre » le train en cours de route
PARTIE D REPRESENTATION ET ANALYSE DU SIGNAL DOPPLER EN MEDECINE
CONCLUSION

4
INTRODUCTION
L’application des découvertes de la physique à l’exploration du corps humain fournit aux médecins des informations essentielles pour leurs diagnostics. Ils peuvent ainsi analyser les enregistrements de signaux électriques périodiques émis par le cœur ou le cerveau. Ils disposent également des images fournies par les divers appareils de l’imagerie médicale, qui exploitent les propriétés des ondes ultrasonores et électromagnétiques. Dans le cadre d’un atelier scientifique, nous nous sommes principalement intéressés à l’utilisation des propriétés des ondes ultrasonores afin d’établir un diagnostic médical.
PARTIE A ONDES ULTRASONORES et TRANSDUCTEURS
1) Caractéristiques des transducteurs ultrasonores
Les ondes acoustiques sont des ondes mécaniques. Elles ont des propriétés communes avec les ondes lumineuses (réflexion, réfraction, diffraction, etc), mais également des différences : elles ne peuvent se propager que dans les milieux matériels élastiques (et donc pas dans le vide). Les ultrasons, comme les sons, font partie des ondes acoustiques : ce qui les différence, c’est la fréquence d’émission . Entre 20 et 20000 Hz pour les sons, au-delà de 20000Hz pour les ultrasons. a) Fréquence de résonance
Piézoélectricité : un cristal est dit piézoélectrique si, lorsqu’il est soumis à des contraintes mécaniques (pression,
tension), certaines de ses faces se chargent (effet direct). Un tel effet est réversible : si une tension électrique est
appliquée aux bornes du cristal, celui-ci se déforme (effet
inverse).
Un émetteur ultrasonore est relié à un générateur de basses
fréquences (GBF). L’émetteur est le siège d’oscillations très
brèves, de fréquence de l’ordre de 40 kHz, par effet
piézoélectrique inverse : des ondes mécaniques ultrasonores
sont produites. Le récepteur transforme l’onde ultrasonore
reçue en signal électrique de même fréquence que cette onde,
par effet piézoélectrique direct.
Expérience : nous disposons d’un émetteur et d’un récepteur à
US sur tige. Nous avons branché l’émetteur sur le GBF réglé en
mode sinusoïdal, avec une amplitude constante de 10 V.
Pour différentes valeurs de la fréquence du GBF, nous
mesurons la tension U aux bornes du récepteur grâce
à un voltmètre.
Nous remarquons que la réponse du récepteur
dépend de la fréquence.
5
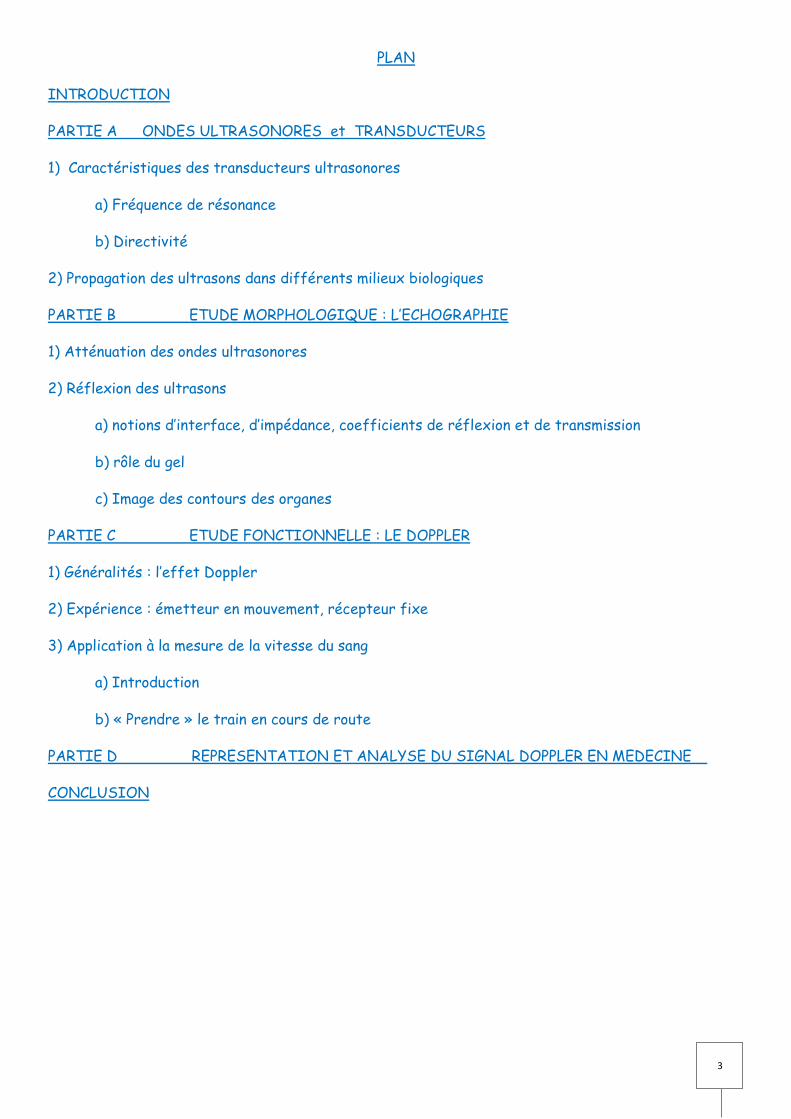
BILAN :
Pour chaque transducteur ultrasonore, il existe une fréquence particulière pour laquelle l’amplitude émise est
maximale : c’est la fréquence de résonance du transducteur.
Pour le transducteur que nous avons testé, la tension aux bornes du récepteur est maximale pour
b) Directivité
Nous étudions maintenant les variations de l’amplitude du signal
reçu par l’émetteur en fonction de sa position le long de l’axe (y’y),
ceci afin d’évaluer la divergence du faisceau d’ultrasons. On prend
comme référence l’amplitude maximale (obtenue face à
l’émetteur), et on déplace latéralement le récepteur jusqu’à
obtenir une amplitude égale à la moitié de la valeur maximale.
Mesures :
x (cm) 2,0 3,0 4,0 5,0 6,0 7,0 8,0 9,0 10,0
y (cm) 0,8 1,3 1,7 2,1 2,6 3,0 3,4 3,8 4,2
Fréquence de résonance
f = (40,8 0,1)kHz
f = (40,8 0,1)kHz
Courbe : Tension U en fonction de la fréquence f

6
Par identification, on trouve tan 0,424 , 23 , donc 2 46
Conclusion : l’ouverture du faisceau, correspondant à une amplitude de la tension égale à la moitié de sa valeur
maximale, est de 46°. Le faisceau est bien moins directif que pour le laser.
2) Propagation des ultrasons dans différents milieux biologiques
Dans le corps humain, il y a de l’air (dans les poumons), des liquides (eau, sang), des corps mous (muscles) et des os. Déterminons la célérité des ultrasons dans ces différents milieux. a) dans l’air Les mesures ont été effectuées au cours d’une séance de travaux pratiques, dans le cadre du programme scolaire de terminale S. Nous avons utilisé deux méthodes : le mode « salves courtes » d’une part, puis « en continu ». Ces expériences étant classiques, nous ne gardons que le résultat de l’expérience : la célerité des ultrasons dans l’air à 23°C. Bilan : à T = 23°C , la célérité des US dans l’air est Comparaison avec la valeur attendue : La température de l’air a été mesurée : T(°C) =23°C. La température en Kelvin est donc T = 273 + T(°C) = 296 K. La valeur de la vitesse du son attendue peut être calculée à partir de l’expression théorique de V obtenue à l’aide du modèle du gaz parfait (l’air étant assimilé à un gaz diatomique, ɤ=1,4)
Vth = ɤRTM
où R est la constante des gaz parfaits, T la température de l’air en kelvin, M la masse molaire de l’air
en kg/mol
2 1
airv (3,3 0,1) 10 m.s
Modèle linéaire
y = 0,424.x
Coef.de correlation : 0,998
Courbe : y en fonction de x
7
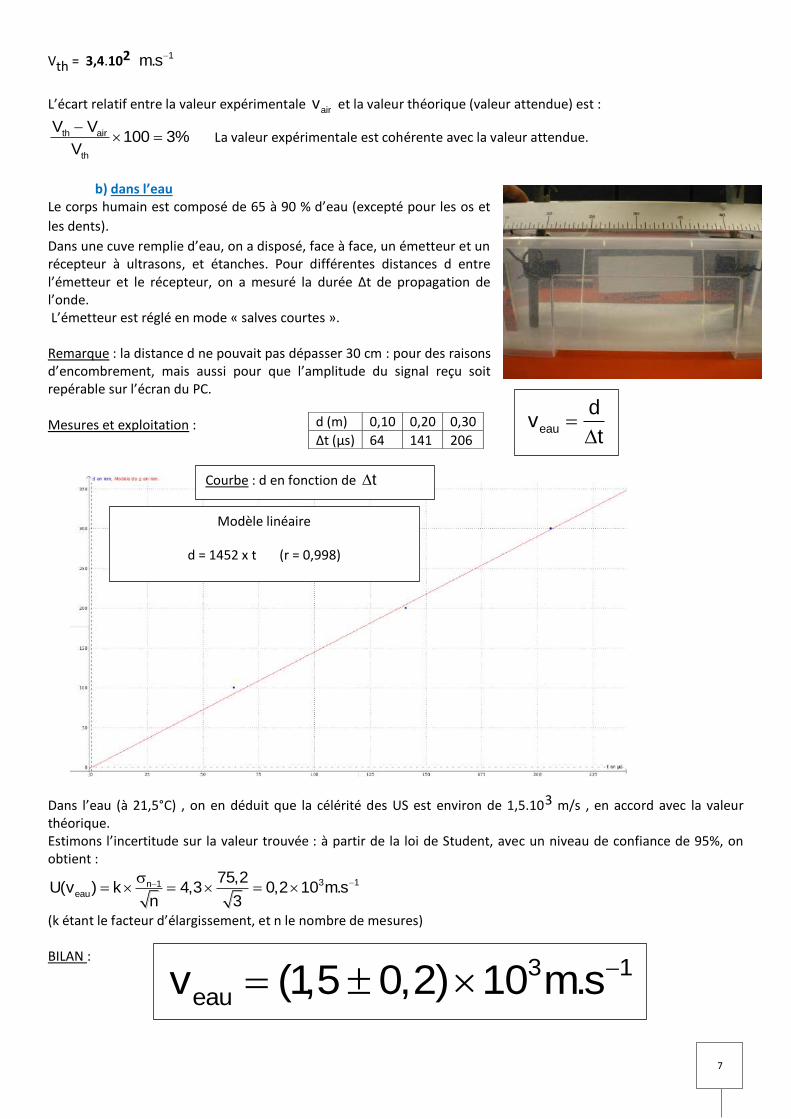
Vth = 3,4.102 1m.s
L’écart relatif entre la valeur expérimentale airv et la valeur théorique (valeur attendue) est :
th air
th
V V100 3%
V
La valeur expérimentale est cohérente avec la valeur attendue.
b) dans l’eau Le corps humain est composé de 65 à 90 % d’eau (excepté pour les os et
les dents).
Dans une cuve remplie d’eau, on a disposé, face à face, un émetteur et un récepteur à ultrasons, et étanches. Pour différentes distances d entre l’émetteur et le récepteur, on a mesuré la durée Δt de propagation de l’onde. L’émetteur est réglé en mode « salves courtes ». Remarque : la distance d ne pouvait pas dépasser 30 cm : pour des raisons d’encombrement, mais aussi pour que l’amplitude du signal reçu soit repérable sur l’écran du PC. Mesures et exploitation :
Dans l’eau (à 21,5°C) , on en déduit que la célérité des US est environ de 1,5.103 m/s , en accord avec la valeur théorique. Estimons l’incertitude sur la valeur trouvée : à partir de la loi de Student, avec un niveau de confiance de 95%, on obtient :
3 1n 1eau
75,2U(v ) k 4,3 0,2 10 m.s
n 3
(k étant le facteur d’élargissement, et n le nombre de mesures) BILAN :
d (m) 0,10 0,20 0,30
Δt (µs) 64 141 206
3 1
eauv (1,5 0,2) 10 m.s
Modèle linéaire
d = 1452 x t
coef. de correlation : 0,998
eau
dv
t
Courbe : d en fonction de t
Courbe : d en fonction de t
Modèle linéaire
d = 1452 x t (r = 0,998)
8
c) Visite chez le boucher !
Tenant compte des conseils du jury régional des Olympiades de Physique, nous souhaitions étudier des milieux
proches du corps humain. Nous avons demandé conseil à Mr SEILER , le boucher local : celui-ci nous a indiqué que la
viande la plus proche de l’Homme est la viande de porc. Nous nous empressons donc d’acheter un morceau de
viande de porc, et tentons de mesurer la célérité des US dans celle-ci, en plaçant un émetteur et un récepteur du
même côté d’une face de la viande…sans succès …aucun signal n’est
détecté par le récepteur.
Un médecin nous conseille de rajouter du gel entre la sonde et le morceau
de viande afin d’avoir un meilleur contact…2ème échec !
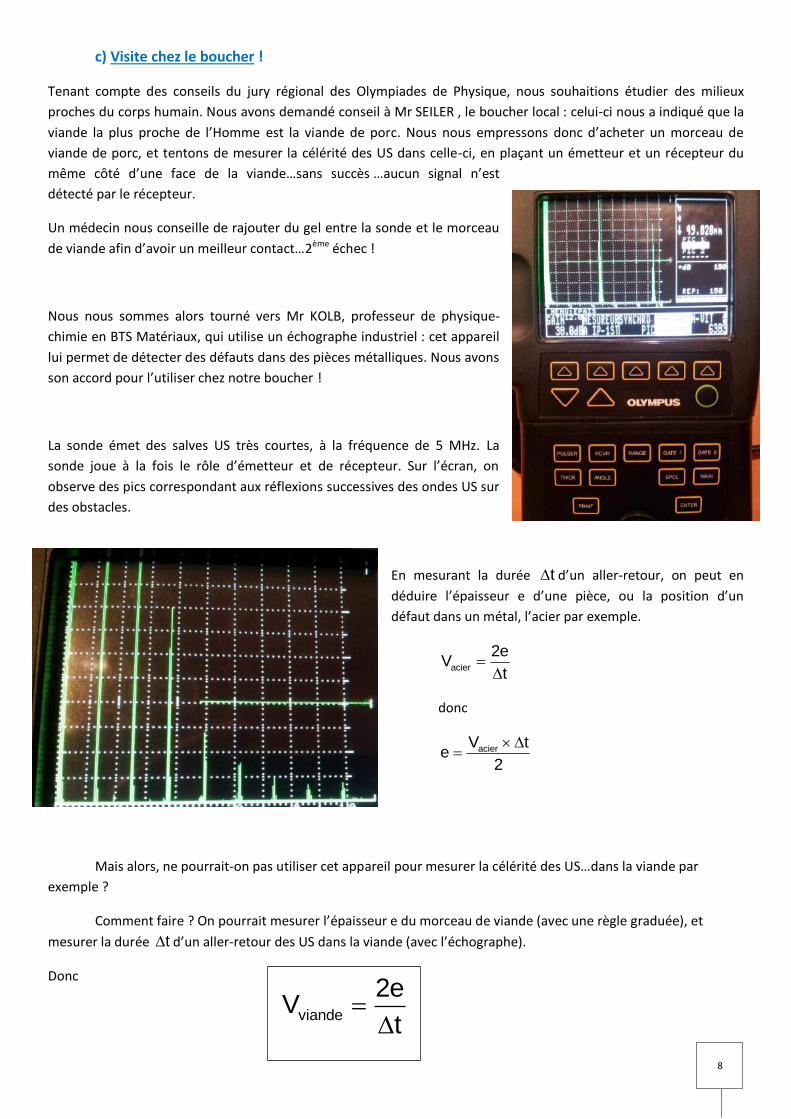
Nous nous sommes alors tourné vers Mr KOLB, professeur de physique-
chimie en BTS Matériaux, qui utilise un échographe industriel : cet appareil
lui permet de détecter des défauts dans des pièces métalliques. Nous avons
son accord pour l’utiliser chez notre boucher !
La sonde émet des salves US très courtes, à la fréquence de 5 MHz. La
sonde joue à la fois le rôle d’émetteur et de récepteur. Sur l’écran, on
observe des pics correspondant aux réflexions successives des ondes US sur
des obstacles.
En mesurant la durée t d’un aller-retour, on peut en
déduire l’épaisseur e d’une pièce, ou la position d’un
défaut dans un métal, l’acier par exemple.
acier
2eV
t
donc
acierV te
2
Mais alors, ne pourrait-on pas utiliser cet appareil pour mesurer la célérité des US…dans la viande par
exemple ?
Comment faire ? On pourrait mesurer l’épaisseur e du morceau de viande (avec une règle graduée), et
mesurer la durée t d’un aller-retour des US dans la viande (avec l’échographe).
Donc
viande
2eV
t

9
De retour chez notre boucher, nous
procédons aux mesures sur trois
morceaux qu’il nous a préparé :
- muscle (épaule de porc) - graisse (bajoue de porc) - os (tête de fémur d’un bœuf)
Pour chaque « matériau », nous procédons à deux mesures, pour
deux épaisseurs e différentes. La célérité retenue est la moyenne des deux mesures.
muscle graisse os
Sonde à 5 MHz
e 8cm
Pic d’émission
(référence)
1er pic de réception
1er aller-retour
(distance 2.e)
2ème pic de réception
Double aller-retour
(distance 4.e)
t
2. t
10
Exemple de mesure : Pour le morceau de muscle, on mesure :
1e (6,5 0,2)cm 1t (81 4) s 11
1 6
1
2e 2 0,065V 1605m.s
t 81 10
1
1
U(V )0,06
V
2e (10,0 0,2)cm 2t (128 4) s 12
2 6
2
2e 2 0,100V 1563m.s
t 128 10
2
2
U(V )0,04
V
Calcul d’incertitude sur une mesure unique : 2 2U(v) U(e) U( t)(( ) ( ) )
v e t
11 2muscle
V VV 1584m.s
2
, 1
muscle muscleU(V ) 0,05 V 0,05 1584 79m.s
Et enfin…
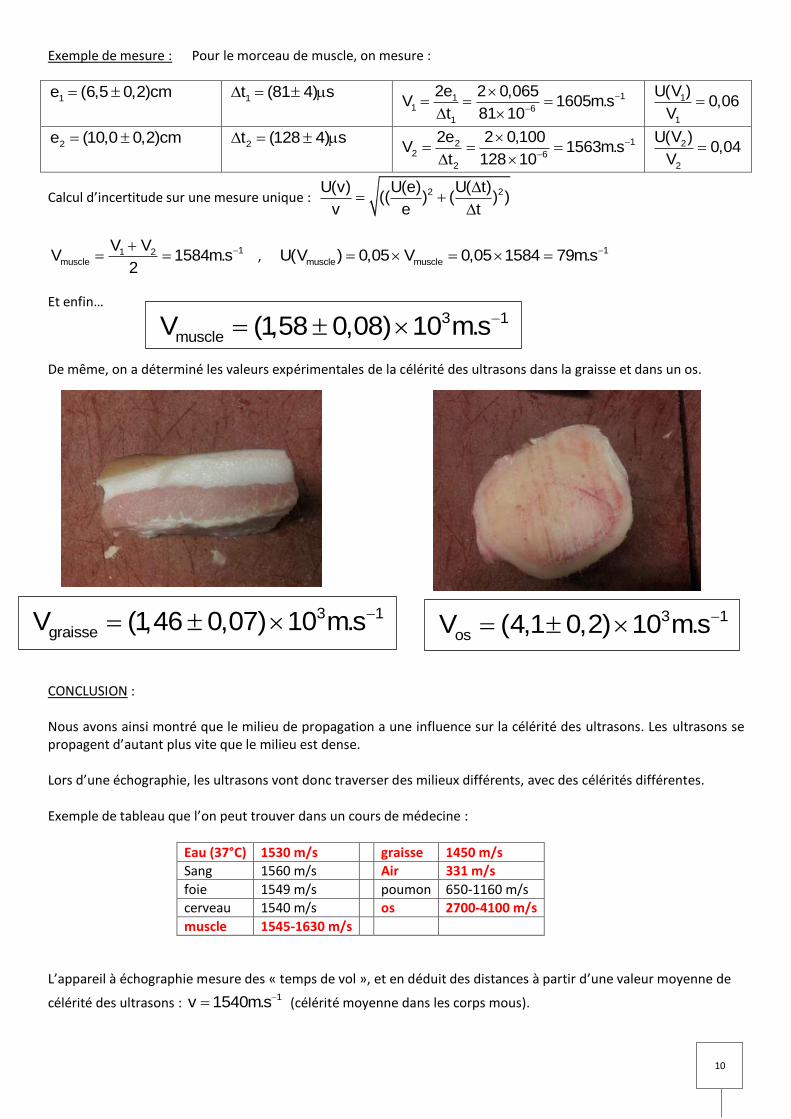
De même, on a déterminé les valeurs expérimentales de la célérité des ultrasons dans la graisse et dans un os.
CONCLUSION : Nous avons ainsi montré que le milieu de propagation a une influence sur la célérité des ultrasons. Les ultrasons se propagent d’autant plus vite que le milieu est dense. Lors d’une échographie, les ultrasons vont donc traverser des milieux différents, avec des célérités différentes. Exemple de tableau que l’on peut trouver dans un cours de médecine :
Eau (37°C) 1530 m/s graisse 1450 m/s
Sang 1560 m/s Air 331 m/s
foie 1549 m/s poumon 650-1160 m/s
cerveau 1540 m/s os 2700-4100 m/s
muscle 1545-1630 m/s
L’appareil à échographie mesure des « temps de vol », et en déduit des distances à partir d’une valeur moyenne de
célérité des ultrasons : 1v 1540m.s (célérité moyenne dans les corps mous).
3 1
muscleV (1,58 0,08) 10 m.s
3 1
graisseV (1,46 0,07) 10 m.s
3 1
osV (4,1 0,2) 10 m.s

11
PARTIE B ETUDE MORPHOLOGIQUE : L’ECHOGRAPHIE
Vers les années 1970, l’utilisation des ondes ultrasonores, combinée au traitement d’images et à l’apparition de la notion d’échelle de gris, a fourni la première technique d’imagerie médicale non radiologique. Actuellement, l’examen par ultrasons est devenu la suite logique d’un examen clinique dans de nombreuses spécialités de la médecine.
Un examen échographique Vue d’un fœtus dans le ventre maternel Venons-en à l’échographie !
En médecine, l’échographie est un examen courant, indolore et non dangereux permettant l’observation « directe »
d’organes internes. La technique de l’échographie utilise des ondes ultrasonores produites par une sonde jouant le
rôle d’émetteur et de récepteur. Les fréquences utilisées dépendent des organes ou des tissus biologiques à sonder
(2 MHz à 20 MHz).
Pour obtenir une image par échographie on exploite entre autres, les propriétés suivantes des ondes ultrasonores :
- la célérité et l’absorption de l’onde ultrasonore dépendent du milieu traversé
- lorsqu’elle change de milieu, une partie de l’onde incidente est réfléchie, l’autre est transmise (elle
continue son chemin). On dit qu’il y a réflexion partielle lorsqu’il y a changement de milieu aux interfaces tissulaires.
Connaissant les temps de retour des échos, leurs amplitudes et leurs célérités, on en déduit des informations sur la
nature et l’épaisseur des tissus traversés. Un ordinateur compile toutes les informations et fournit des images de
synthèse des organes sondés.
1) Atténuation des ondes ultrasonores
Sur l’ensemble des impressions d’écran, on peut se
rendre compte que la hauteur des pics, suite aux
réflexions multiples, diminue.
Existe-t-il une loi simple entre l’intensité des pics et la
distance parcourue dans la matière ?
Pour vérifier cela, nous avons utilisé une cale-étalon en
acier de 7mm d’épaisseur.
12
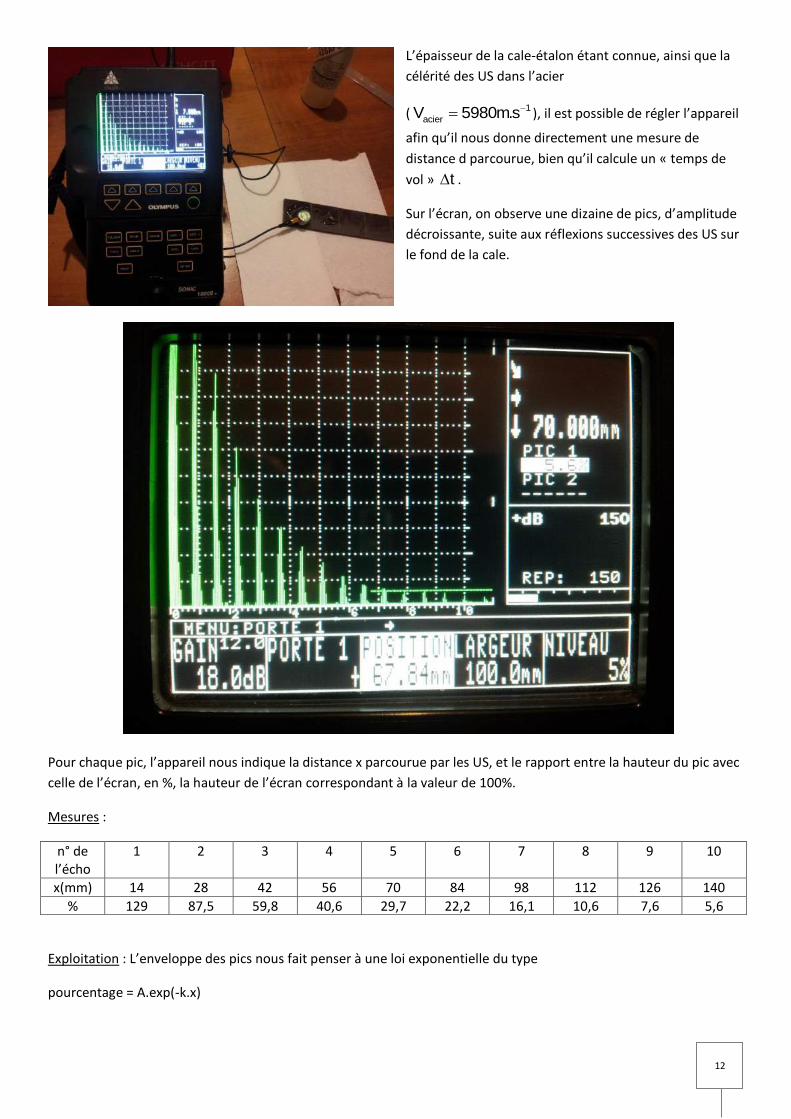
L’épaisseur de la cale-étalon étant connue, ainsi que la
célérité des US dans l’acier
( 1
acierV 5980m.s ), il est possible de régler l’appareil
afin qu’il nous donne directement une mesure de
distance d parcourue, bien qu’il calcule un « temps de
vol » t .
Sur l’écran, on observe une dizaine de pics, d’amplitude
décroissante, suite aux réflexions successives des US sur
le fond de la cale.
Pour chaque pic, l’appareil nous indique la distance x parcourue par les US, et le rapport entre la hauteur du pic avec
celle de l’écran, en %, la hauteur de l’écran correspondant à la valeur de 100%.
Mesures :
n° de l’écho
1 2 3 4 5 6 7 8 9 10
x(mm) 14 28 42 56 70 84 98 112 126 140
% 129 87,5 59,8 40,6 29,7 22,2 16,1 10,6 7,6 5,6
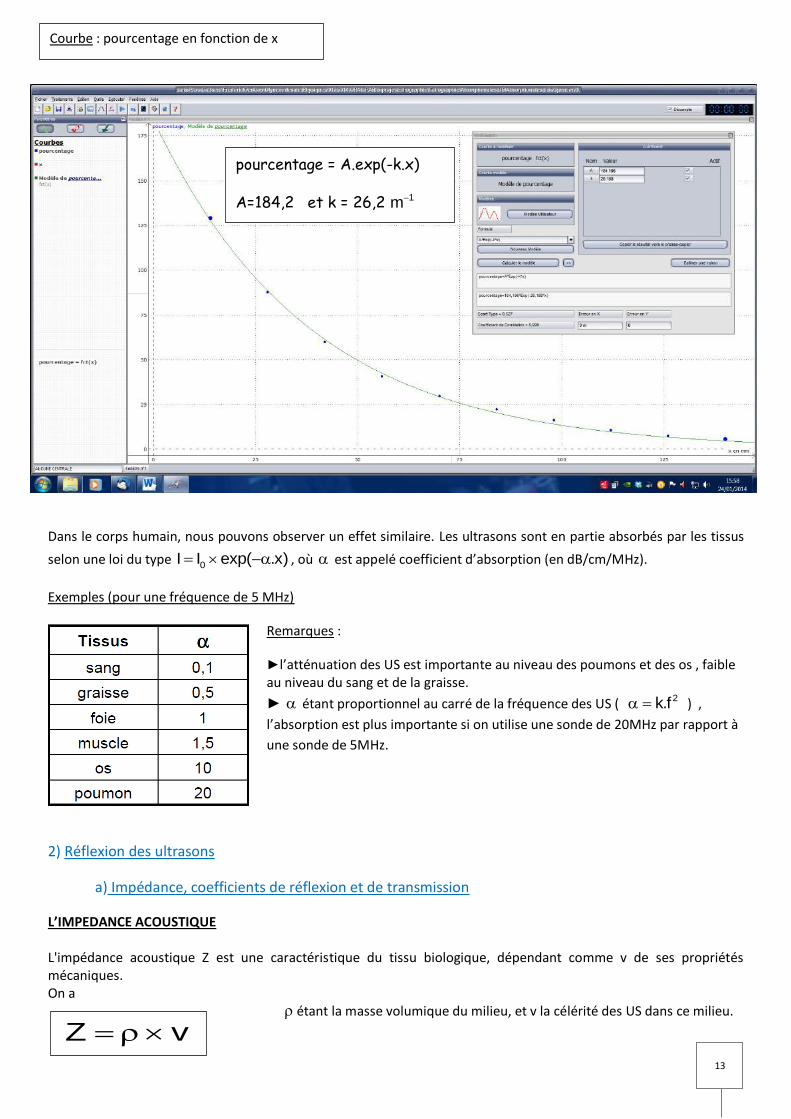
Exploitation : L’enveloppe des pics nous fait penser à une loi exponentielle du type
pourcentage = A.exp(-k.x)
7mm d’épaisseur
13
Dans le corps humain, nous pouvons observer un effet similaire. Les ultrasons sont en partie absorbés par les tissus
selon une loi du type 0I I exp( .x) , où est appelé coefficient d’absorption (en dB/cm/MHz).
Exemples (pour une fréquence de 5 MHz)
Remarques :
►l’atténuation des US est importante au niveau des poumons et des os , faible au niveau du sang et de la graisse.
► étant proportionnel au carré de la fréquence des US ( 2k.f ) ,
l’absorption est plus importante si on utilise une sonde de 20MHz par rapport à
une sonde de 5MHz.
2) Réflexion des ultrasons
a) Impédance, coefficients de réflexion et de transmission
L’IMPEDANCE ACOUSTIQUE L'impédance acoustique Z est une caractéristique du tissu biologique, dépendant comme v de ses propriétés mécaniques. On a étant la masse volumique du milieu, et v la célérité des US dans ce milieu.
pourcentage = A.exp(-k.x)
A=184,2 et k = 26,2 1m
Z v
Courbe : pourcentage en fonction de x

14
Les variations de Z entre les tissus entraînent une réflexion des ondes U.S., donc des échos. Dans la partie précédente, nous avons déterminé v pour différents milieux du corps humain. Après la mesure de leur masse volumique, nous pourrons évaluer l’impédance acoustique de chaque milieu.
-mesure de la masse volumique : m
V
Résultats
m (g) V (mL) 3(kg.m ) 1v(m.s ) 2 1Z(kg.m .s )
muscle 203,32 200 1017 1584 61,6 10
graisse 158,16 170 930 1455 61,4 10
os 338,46 250 1354 4098 65,5 10
Eau 1000 1452 61,4 10
Air (à 37°C) 1,2 340 24,1 10
Calculs d’incertitudes : par exemple, pour le muscle
2 2U( ) U(m) U(V) U(V) 20(( ) ( ) ) 0,1
m V V 200
donc 2 3U( ) 1 10 kg.m
On avait déjà calculé l’incertitude sur la vitesse : 1 1U(v) 8 10 m.s
2 2 2 2U(Z) U( ) U(v) 100 80(( ) ( ) ) (( ) ( ) 0,11
Z v 1017 1584
donc 6 6 2 1U(Z) 0,11 1,6 10 0,2 10 kg.m .s
BILAN :
Mesure de la masse m d’un morceau de muscle
(épaule de porc) avec une balance électronique Estimation du volume V d’un os par déplacement
d’eau (une mesure de V a également été effectuée
par des considérations géométriques)
6 2 1
muscleZ (1,6 0,2) 10 kg.m .s
15
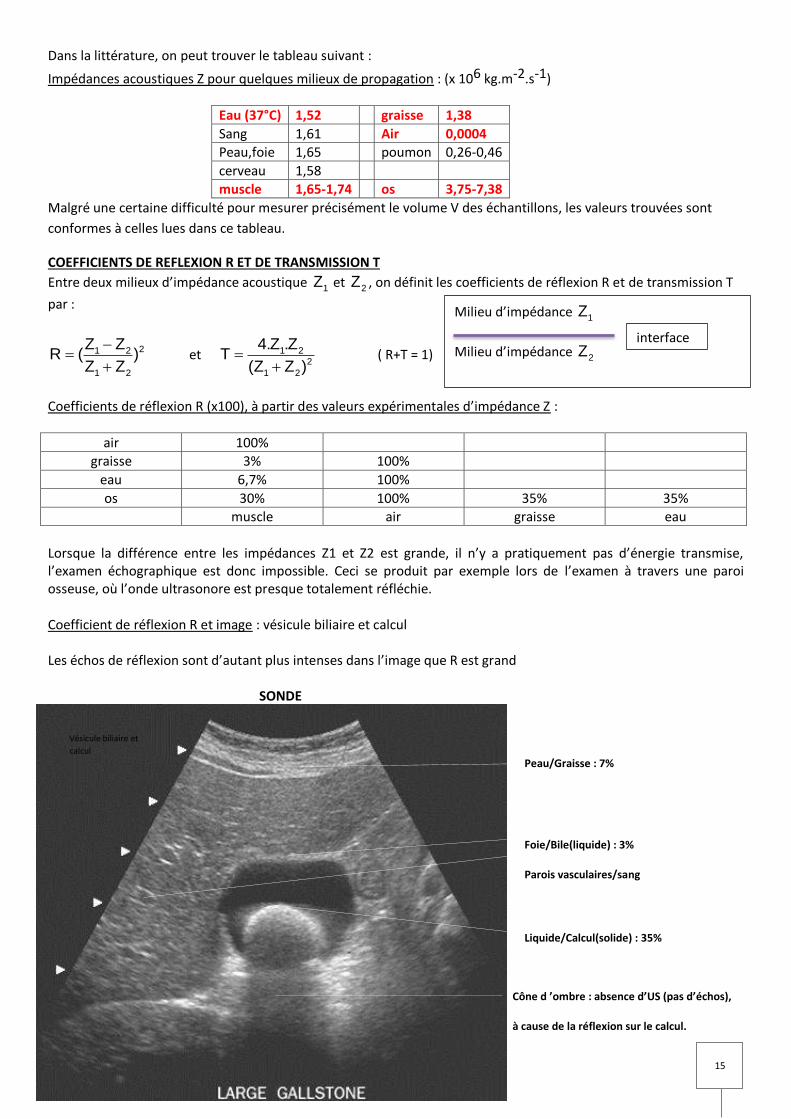
Dans la littérature, on peut trouver le tableau suivant :
Impédances acoustiques Z pour quelques milieux de propagation : (x 106 kg.m-2.s-1)
Eau (37°C) 1,52 graisse 1,38
Sang 1,61 Air 0,0004
Peau,foie 1,65 poumon 0,26-0,46
cerveau 1,58
muscle 1,65-1,74 os 3,75-7,38
Malgré une certaine difficulté pour mesurer précisément le volume V des échantillons, les valeurs trouvées sont
conformes à celles lues dans ce tableau.
COEFFICIENTS DE REFLEXION R ET DE TRANSMISSION T
Entre deux milieux d’impédance acoustique 1
Z et 2Z , on définit les coefficients de réflexion R et de transmission T
par :
21 2
1 2
Z ZR ( )
Z Z
et 1 2
2
1 2
4.Z .ZT
(Z Z )
( R+T = 1)
Coefficients de réflexion R (x100), à partir des valeurs expérimentales d’impédance Z :
air 100%
graisse 3% 100%
eau 6,7% 100%
os 30% 100% 35% 35%
muscle air graisse eau
Lorsque la différence entre les impédances Z1 et Z2 est grande, il n’y a pratiquement pas d’énergie transmise, l’examen échographique est donc impossible. Ceci se produit par exemple lors de l’examen à travers une paroi osseuse, où l’onde ultrasonore est presque totalement réfléchie. Coefficient de réflexion R et image : vésicule biliaire et calcul Les échos de réflexion sont d’autant plus intenses dans l’image que R est grand SONDE
D.GOUNOT PCEM2 2007
Vésicule biliaire et
calcul Peau/Graisse : 7%
Foie/Bile(liquide) : 3%
Parois vasculaires/sang
Liquide/Calcul(solide) : 35%
Cône d ’ombre : absence d’US (pas d’échos),
à cause de la réflexion sur le calcul.
Milieu d’impédance 1
Z
Milieu d’impédance 2Z
interface
16
"Plus un liquide contient de particules, plus l'écho sera important et plus il paraîtra blanc à l'écran" Tous les liquides dépourvus de particules en suspension sont totalement noirs à l'écran. Ceux qui en contiennent comme le sang prennent une couleur grisâtre dont la nuance varie suivant les obstacles rencontrés par les ultrasons. Seules les structures solides comme les os sont totalement blanches.
b) rôle du gel
Lorsque la sonde est en contact avec l’interface air-peau, on a R = 100% et T = 0%
Notre gel « maison » est composé d’eau et de feuilles de gélatine alimentaire
gel eauc c et gel eau donc
gel eauZ Z
Lorsque la sonde est en contact avec l’interface gel-peau, on a R = 0% et T = 100%
Pour l’interfaces entre l’air et la peau, R = 1 (100% de réflexion) : c’est la raison pour laquelle il faut interposer un gel entre la peau et la sonde lors de l’examen échographique, ceci pour diminuer la présence d’air entre les tissus et la sonde, et donc pour diminuer le coefficient de réflexion R. On dit que le gel permet une adaptation d’impédance. On peut également en déduire que les organes en arrière des gaz ne sont pas visibles (échographie abdominale), mais que les embolies gazeuses peuvent au contraire être visualisées (accident de plongée).
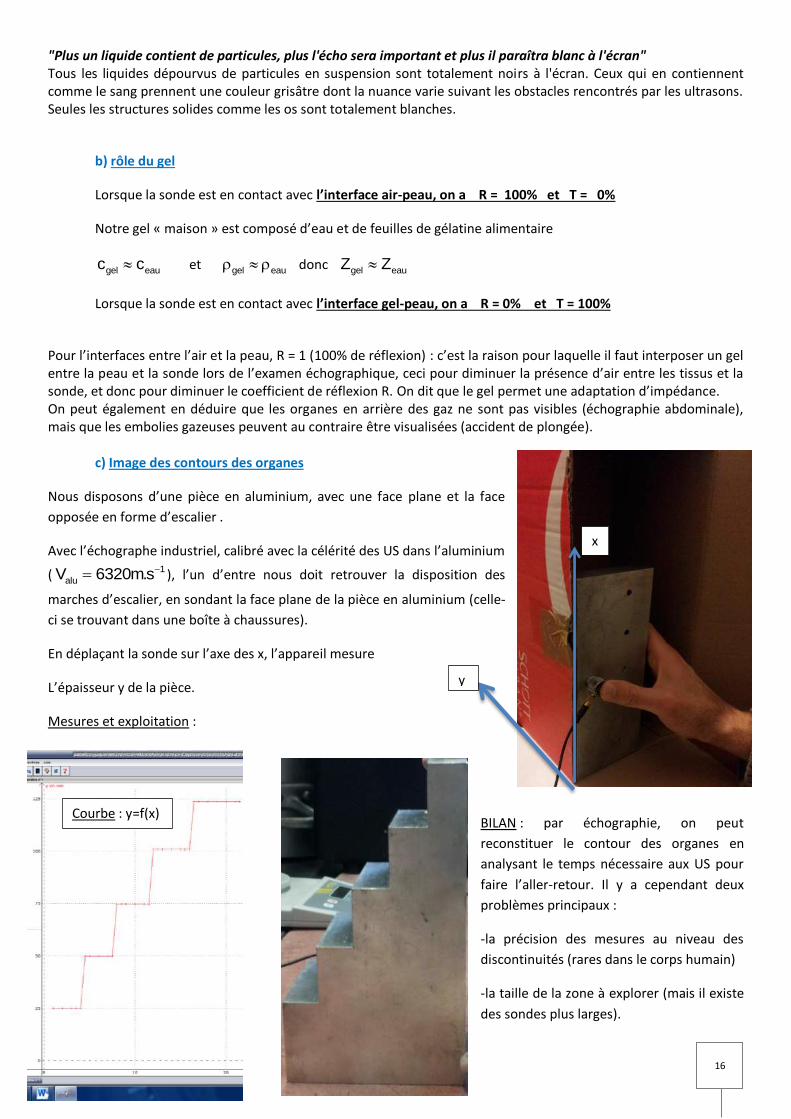
c) Image des contours des organes
Nous disposons d’une pièce en aluminium, avec une face plane et la face
opposée en forme d’escalier .
Avec l’échographe industriel, calibré avec la célérité des US dans l’aluminium
( 1
aluV 6320m.s ), l’un d’entre nous doit retrouver la disposition des
marches d’escalier, en sondant la face plane de la pièce en aluminium (celle-
ci se trouvant dans une boîte à chaussures).
En déplaçant la sonde sur l’axe des x, l’appareil mesure
L’épaisseur y de la pièce.
Mesures et exploitation :
BILAN : par échographie, on peut
reconstituer le contour des organes en
analysant le temps nécessaire aux US pour
faire l’aller-retour. Il y a cependant deux
problèmes principaux :
-la précision des mesures au niveau des
discontinuités (rares dans le corps humain)
-la taille de la zone à explorer (mais il existe
des sondes plus larges).
x
y
Courbe : y=f(x)
17
Remarque : Les fréquences utilisées en échographie sont comprises entre 3 et 20 MHz.
Les sondes de fréquence hautes (entre 10 et 20 MHz) sont réservées aux petits organes superficiels ( par exemple thyroïde, yeux, seins, vaisseaux superficiels) : il y a une bonne résolution de l’image , mais une faible pénétration des ultrasons dans le corps (5-10 cm) Les fréquences basses (entre 3 et 10 MHz) sont réservées aux organes volumineux et profonds : il y a une bonne pénétration des ultrasons (jusqu’à 20cm), mais une faible résolution de l’image.
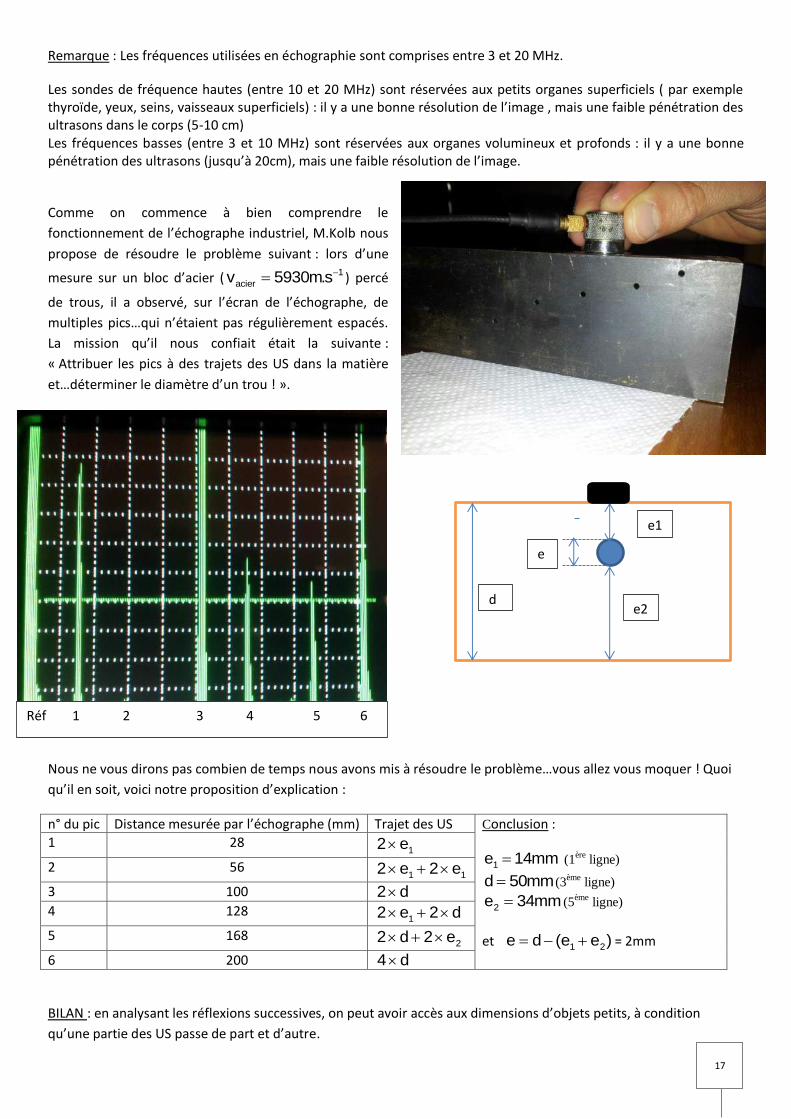
Comme on commence à bien comprendre le
fonctionnement de l’échographe industriel, M.Kolb nous
propose de résoudre le problème suivant : lors d’une
mesure sur un bloc d’acier ( 1
acierv 5930m.s ) percé
de trous, il a observé, sur l’écran de l’échographe, de
multiples pics…qui n’étaient pas régulièrement espacés.
La mission qu’il nous confiait était la suivante :
« Attribuer les pics à des trajets des US dans la matière
et…déterminer le diamètre d’un trou ! ».
Nous ne vous dirons pas combien de temps nous avons mis à résoudre le problème…vous allez vous moquer ! Quoi
qu’il en soit, voici notre proposition d’explication :
n° du pic Distance mesurée par l’échographe (mm) Trajet des US Conclusion :
1e 14mm (1ère
ligne)
d 50mm (3ème
ligne)
2e 34mm (5
ème ligne)
et 1 2e d (e e ) = 2mm
1 28 12 e
2 56 1 12 e 2 e
3 100 2 d
4 128 12 e 2 d
5 168 22 d 2 e
6 200 4 d
BILAN : en analysant les réflexions successives, on peut avoir accès aux dimensions d’objets petits, à condition
qu’une partie des US passe de part et d’autre.
Réf 1 2 3 4 5 6
e1
e2
e
d
18
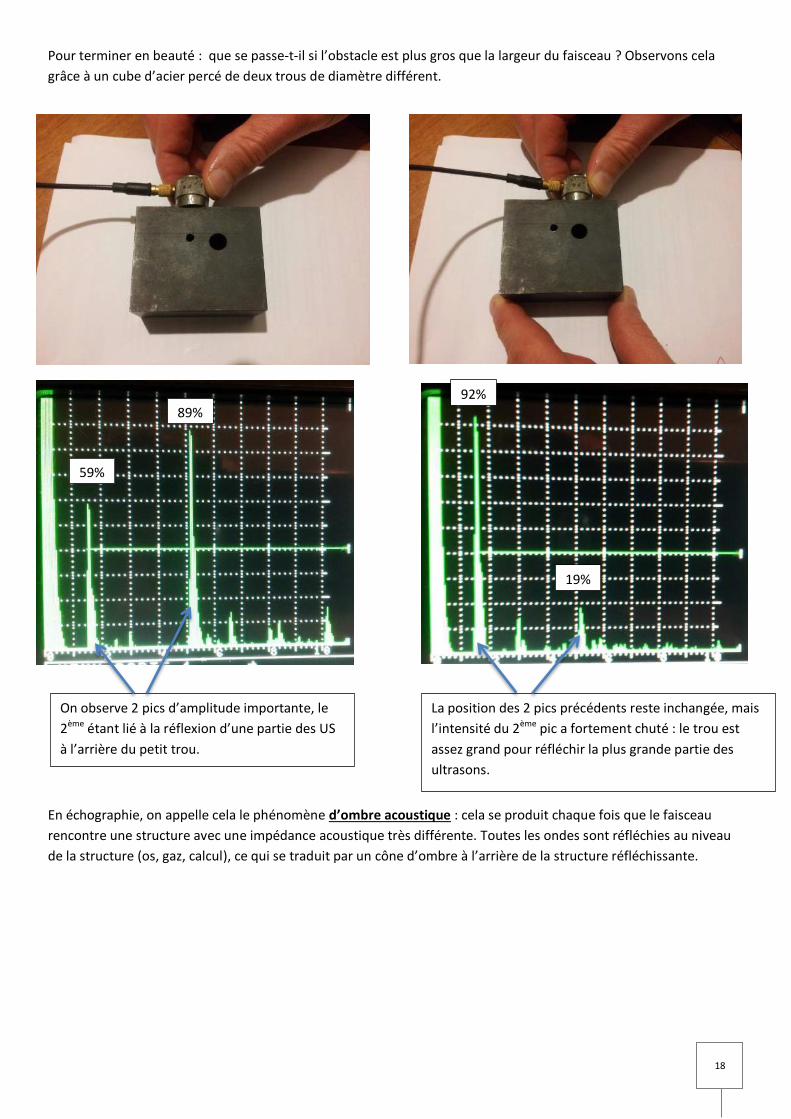
Pour terminer en beauté : que se passe-t-il si l’obstacle est plus gros que la largeur du faisceau ? Observons cela
grâce à un cube d’acier percé de deux trous de diamètre différent.
En échographie, on appelle cela le phénomène d’ombre acoustique : cela se produit chaque fois que le faisceau
rencontre une structure avec une impédance acoustique très différente. Toutes les ondes sont réfléchies au niveau
de la structure (os, gaz, calcul), ce qui se traduit par un cône d’ombre à l’arrière de la structure réfléchissante.
On observe 2 pics d’amplitude importante, le
2ème étant lié à la réflexion d’une partie des US
à l’arrière du petit trou.
La position des 2 pics précédents reste inchangée, mais
l’intensité du 2ème pic a fortement chuté : le trou est
assez grand pour réfléchir la plus grande partie des
ultrasons.
59%
89%
92%
19%

19
PARTIE C ETUDE FONCTIONNELLE : LE DOPPLER
1) Généralités : l’effet Doppler
Le son d’un moteur ou d’une sirène est perçu plus aigu quand le véhicule qui l’émet s’approche d’un observateur , et plus grave quand il s’en éloigne. Ce phénomène a été prévu par Christian DOPPLER en 1842 , puis confirmée expérimentalement par Christoph BUYS-BALLOT en 1845 .
Généralisation : une onde électromagnétique ou mécanique émise avec une fréquence Ef (E comme Emetteur) est
perçue avec une fréquence Rf (R comme Récepteur) différente lorsque l’émetteur et le récepteur sont en
déplacement relatif : c’est l’effet Doppler.
La comparaison entre la fréquence Rf de l’onde perçue et la fréquence
Ef de l’onde émise permet, par exemple, de
déterminer la valeur de la vitesse de l’émetteur par rapport au récepteur : l’effet Doppler constitue une méthode de mesure de vitesses.
L’émetteur E produit des ondes sonores de fréquence Ef qui se propagent à la célérité c. Les vitesses sont mesurées
dans un référentiel terrestre. Dans tous les cas, on considérera que les observateurs A et B sont immobiles dans le référentiel terrestre. ► 1er cas : lorsque l’émetteur est immobile (image a), les observateurs A et B (immobiles) perçoivent des ondes de
même longueur d’onde E
c
f , et de même fréquence A B Ef f f
► 2ème cas : lorsque l’émetteur se déplace à la vitesse Ev , en s’approchant de l’observateur A et en s’éloignant de
l’observateur B, on remarque que (image b) :
♦ la longueur d’onde A perçue par l’observateur A est inférieure à la longueur d’onde émise .
A A
1 1
A
c c
A Ef f
BILAN : lorsque l’émetteur s’approche de l’observateur, la fréquence perçue est supérieure à la fréquence émise : l’observateur entend un son plus aigu.
♦ la longueur d’onde B perçue par l’observateur B est supérieure à la longueur d’onde émise .
B B
1 1
B
c c
B Ef f
BILAN : lorsque l’émetteur s’éloigne de l’observateur, la fréquence perçue est inférieure à la fréquence émise : l’observateur entend un son plus grave.

20
2) Expérience : émetteur en mouvement, récepteur fixe
EXPERIENCE : afin de mettre en évidence quantitativement l’effet Doppler, nous avons enregistré le son d’un klaxon
de voiture à l’arrêt, puis le son de ce klaxon lorsque la voiture roulait à vitesse constante (régulateur de vitesse
bloqué à 70 km/h) sur une route rectiligne.
Acteurs :
-le papa d’Alexandre, dans la voiture (nous sommes mineurs !)
-Alexandre, au bord de la route, qui enregistre le son du klaxon avant et après le passage de la voiture devant lui.
-Claire, qui filme le mouvement de la voiture, à partir d’un petit chemin de terre perpendiculaire à la route. La
position de la camera permet d’observer le mouvement de la voiture, sans bouger la camera.
-Madeline, qui analyse les données avec les logiciels Audacity (pour le son) et Latis Pro (pour analyser le mouvement
de la voiture).
RESULTATS :
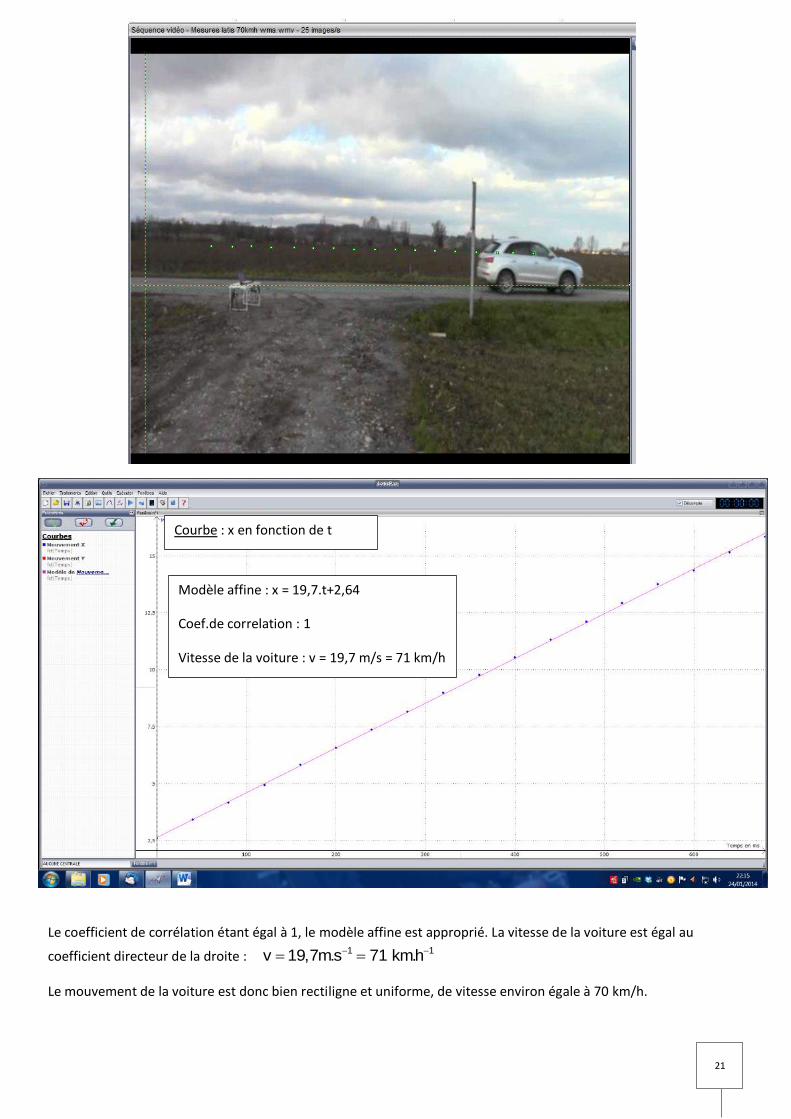
► Etude du mouvement de la voiture
Avec Latis Pro, on réalise le pointage des positions successives d’un point de la voiture. Pour l’étalonnage, on prend
la longueur de la voiture (4,38m ). On trace x = f(t) , et on modélise par un modèle affine.
Mvt de la voiture
microphone
camescope
21
Le coefficient de corrélation étant égal à 1, le modèle affine est approprié. La vitesse de la voiture est égal au
coefficient directeur de la droite : 1v 19,7m.s 71 1km.h
Le mouvement de la voiture est donc bien rectiligne et uniforme, de vitesse environ égale à 70 km/h.
Modèle affine : x = 19,7.t+2,64
Coef.de correlation : 1
Vitesse de la voiture : v = 19,7 m/s = 71 km/h
Courbe : x en fonction de t
22
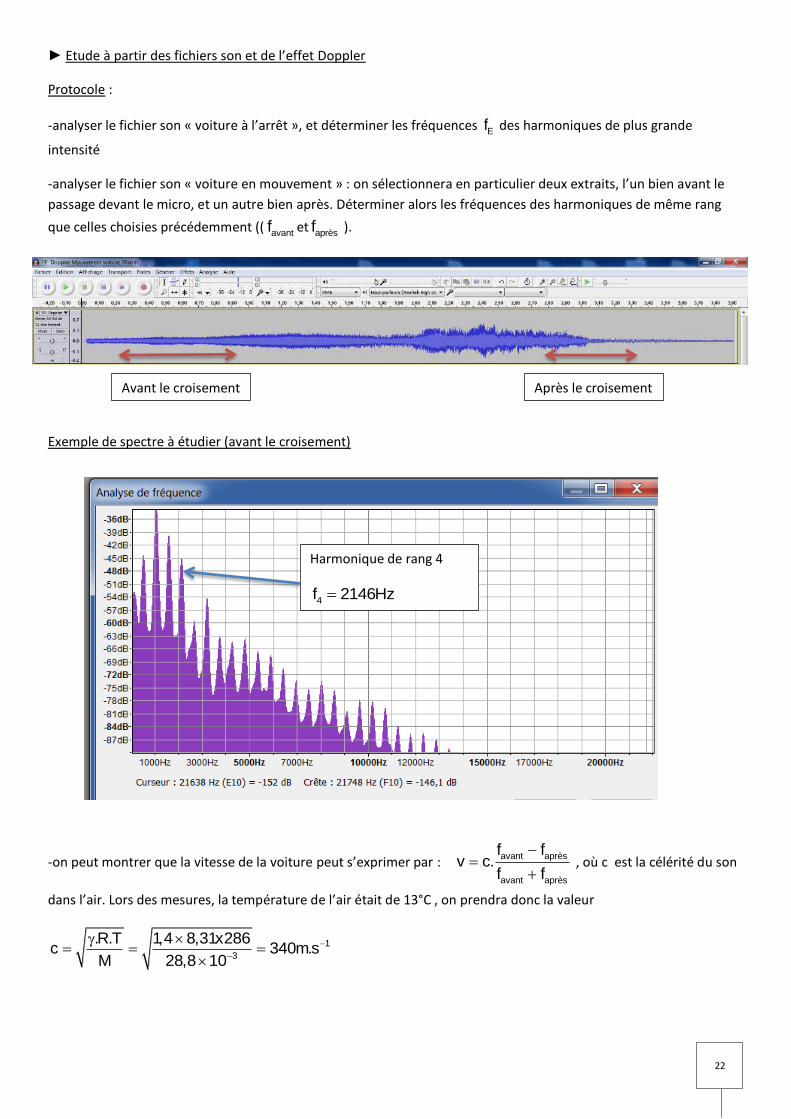
► Etude à partir des fichiers son et de l’effet Doppler
Protocole :
-analyser le fichier son « voiture à l’arrêt », et déterminer les fréquences Ef des harmoniques de plus grande
intensité
-analyser le fichier son « voiture en mouvement » : on sélectionnera en particulier deux extraits, l’un bien avant le
passage devant le micro, et un autre bien après. Déterminer alors les fréquences des harmoniques de même rang
que celles choisies précédemment ((avantf et
aprèsf ).
Exemple de spectre à étudier (avant le croisement)
-on peut montrer que la vitesse de la voiture peut s’exprimer par : avant après
avant après
f fv c.
f f
, où c est la célérité du son
dans l’air. Lors des mesures, la température de l’air était de 13°C , on prendra donc la valeur
1
3
.R.T 1,4 8,31x286c 340m.s
M 28,8 10
Avant le croisement Après le croisement
Harmonique de rang 4
4f 2146Hz
23
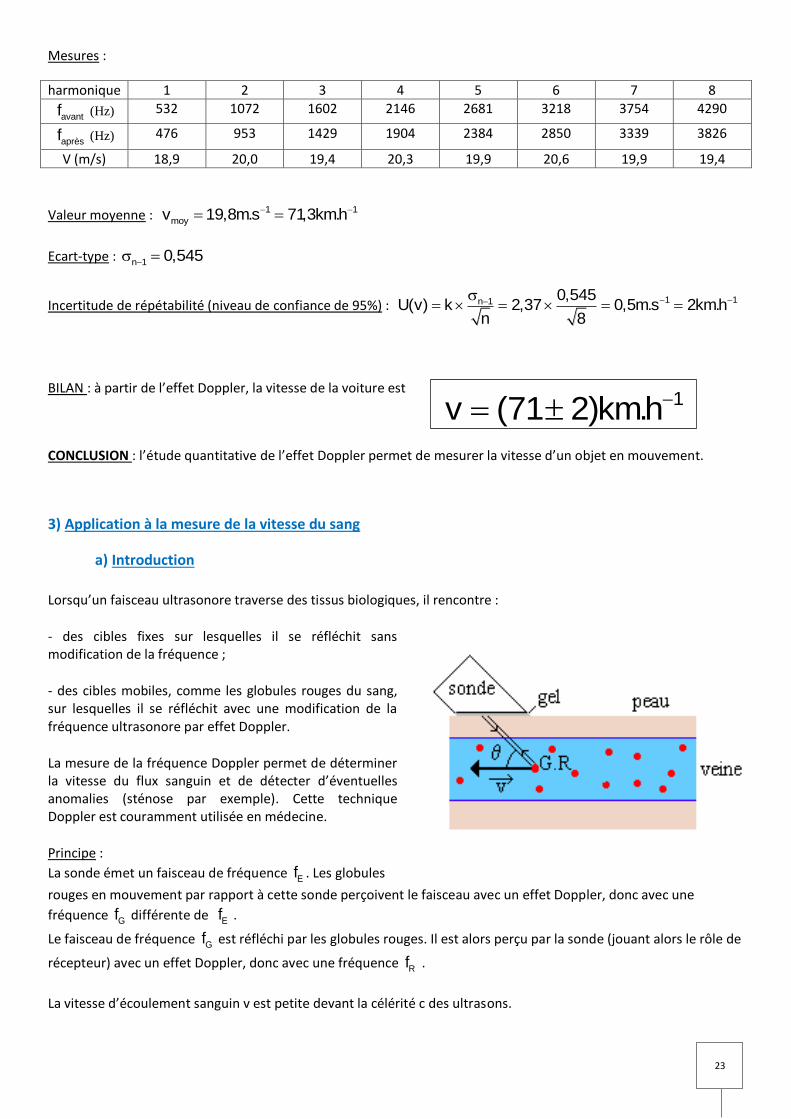
Mesures :
harmonique 1 2 3 4 5 6 7 8
avantf (Hz) 532 1072 1602 2146 2681 3218 3754 4290
aprèsf (Hz) 476 953 1429 1904 2384 2850 3339 3826
V (m/s) 18,9 20,0 19,4 20,3 19,9 20,6 19,9 19,4
Valeur moyenne : 1 1
moyv 19,8m.s 71,3km.h
Ecart-type : n 1 0,545
Incertitude de répétabilité (niveau de confiance de 95%) : 1 1n 1 0,545U(v) k 2,37 0,5m.s 2km.h
n 8
BILAN : à partir de l’effet Doppler, la vitesse de la voiture est
CONCLUSION : l’étude quantitative de l’effet Doppler permet de mesurer la vitesse d’un objet en mouvement.
3) Application à la mesure de la vitesse du sang
a) Introduction
Lorsqu’un faisceau ultrasonore traverse des tissus biologiques, il rencontre :
- des cibles fixes sur lesquelles il se réfléchit sans modification de la fréquence ;
- des cibles mobiles, comme les globules rouges du sang, sur lesquelles il se réfléchit avec une modification de la fréquence ultrasonore par effet Doppler.
La mesure de la fréquence Doppler permet de déterminer la vitesse du flux sanguin et de détecter d’éventuelles anomalies (sténose par exemple). Cette technique Doppler est couramment utilisée en médecine.
Principe :
La sonde émet un faisceau de fréquence Ef . Les globules
rouges en mouvement par rapport à cette sonde perçoivent le faisceau avec un effet Doppler, donc avec une
fréquence Gf différente de Ef .
Le faisceau de fréquence Gf est réfléchi par les globules rouges. Il est alors perçu par la sonde (jouant alors le rôle de
récepteur) avec un effet Doppler, donc avec une fréquence Rf .
La vitesse d’écoulement sanguin v est petite devant la célérité c des ultrasons.
1v (71 2)km.h
24
La différence de fréquence E R
f f f entre l’onde émise et l’onde reçue (ou fréquence Doppler) est alors :
Le coefficient 2 qui apparaît dans cette expression est la traduction du double effet Doppler résultant de la
réflexion de l’onde ultrasonore sur une cible mobile.
La mesure de f permet de déterminer la vitesse d’écoulement sanguin v par la relation : E
c. fv
2.f .cos
Le médecin spécialiste va donc chercher, le long d’une veine ou d’une artère par exemple, une éventuelle variation
de la vitesse du sang (écoulement turbulent). Si une augmentation de la vitesse est détectée, on peut émettre
l’hypothèse d’une sténose, c’est-à-dire un rétrécissement de la veine ou de l’artère, ce qui pourrait avoir des
conséquences fâcheuses pour le patient.
b) « Prendre » le train en cours de route
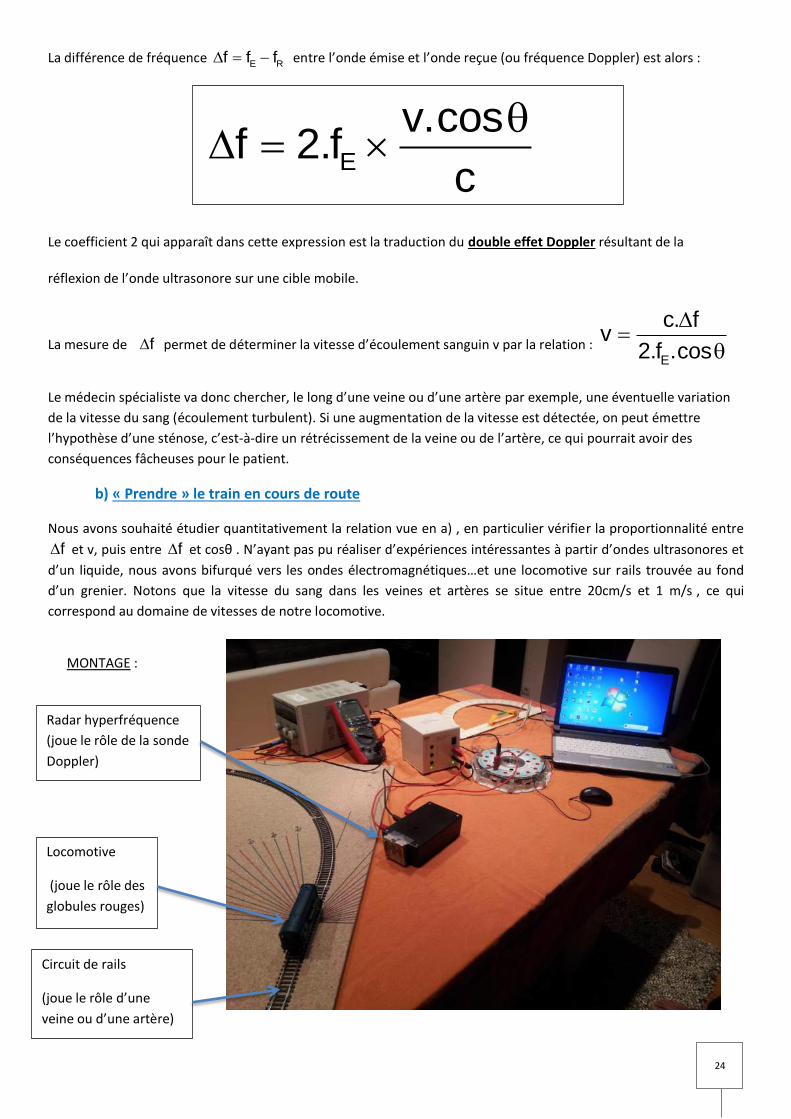
Nous avons souhaité étudier quantitativement la relation vue en a) , en particulier vérifier la proportionnalité entre
f et v, puis entre f et cosθ . N’ayant pas pu réaliser d’expériences intéressantes à partir d’ondes ultrasonores et
d’un liquide, nous avons bifurqué vers les ondes électromagnétiques…et une locomotive sur rails trouvée au fond
d’un grenier. Notons que la vitesse du sang dans les veines et artères se situe entre 20cm/s et 1 m/s , ce qui
correspond au domaine de vitesses de notre locomotive.
MONTAGE :
E
v.cosf 2.f
c
Radar hyperfréquence
(joue le rôle de la sonde
Doppler)
Locomotive
(joue le rôle des
globules rouges)
Circuit de rails
(joue le rôle d’une
veine ou d’une artère)
25
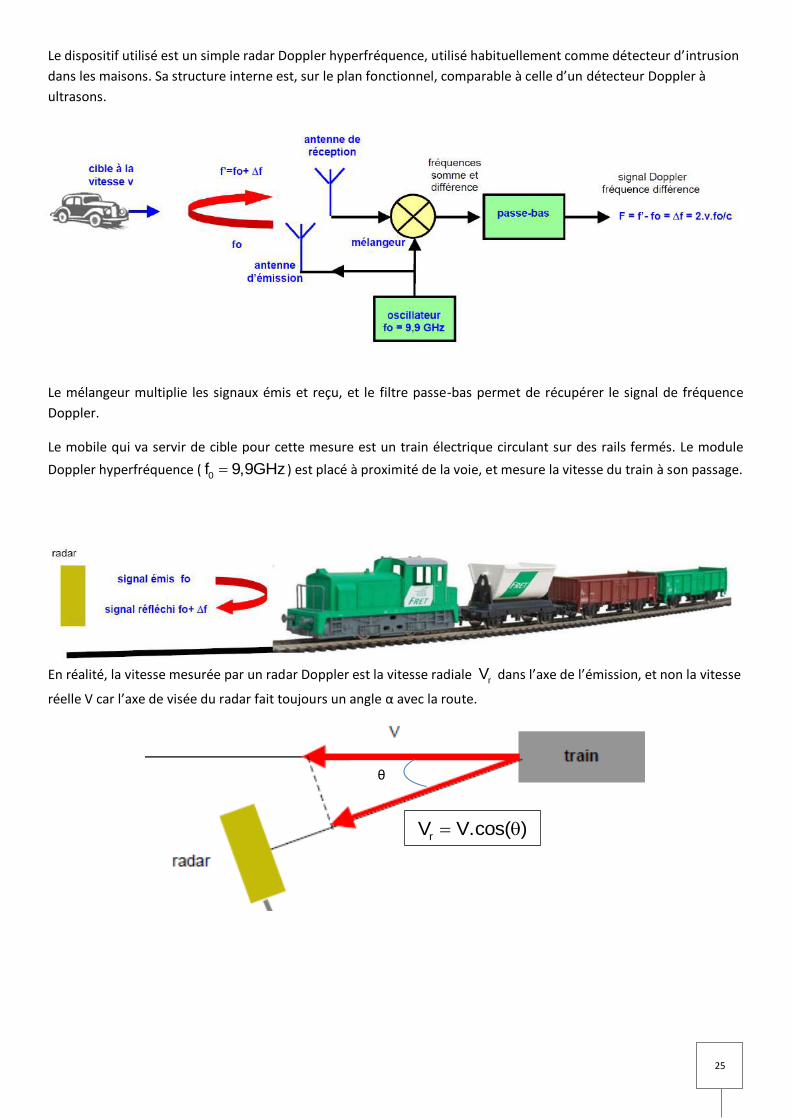
Le dispositif utilisé est un simple radar Doppler hyperfréquence, utilisé habituellement comme détecteur d’intrusion
dans les maisons. Sa structure interne est, sur le plan fonctionnel, comparable à celle d’un détecteur Doppler à
ultrasons.
Le mélangeur multiplie les signaux émis et reçu, et le filtre passe-bas permet de récupérer le signal de fréquence
Doppler.
Le mobile qui va servir de cible pour cette mesure est un train électrique circulant sur des rails fermés. Le module
Doppler hyperfréquence (0f 9,9GHz ) est placé à proximité de la voie, et mesure la vitesse du train à son passage.
En réalité, la vitesse mesurée par un radar Doppler est la vitesse radiale rV dans l’axe de l’émission, et non la vitesse
réelle V car l’axe de visée du radar fait toujours un angle α avec la route.
θ
rV V.cos( )
26
Mesures :
-On peut alimenter le rail avec une tension continue réglable : cela permet de faire varier la vitesse V de la
locomotive.
-Pour différentes valeurs de tension (et donc de vitesse V), on enregistre le signal à la sortie du filtre passe-bas
lorsque la locomotive passe devant le radar. On réalise l’analyse spectrale du signal, et on en déduit la fréquence
Doppler. On refait 5 fois chaque mesure, et on note la moyenne dans un tableau.
-Pour déterminer la vitesse V de la locomotive, on mesure la durée t nécessaire pour faire 2 tours, soit 6,64 m.
On a alors 6,64
Vt
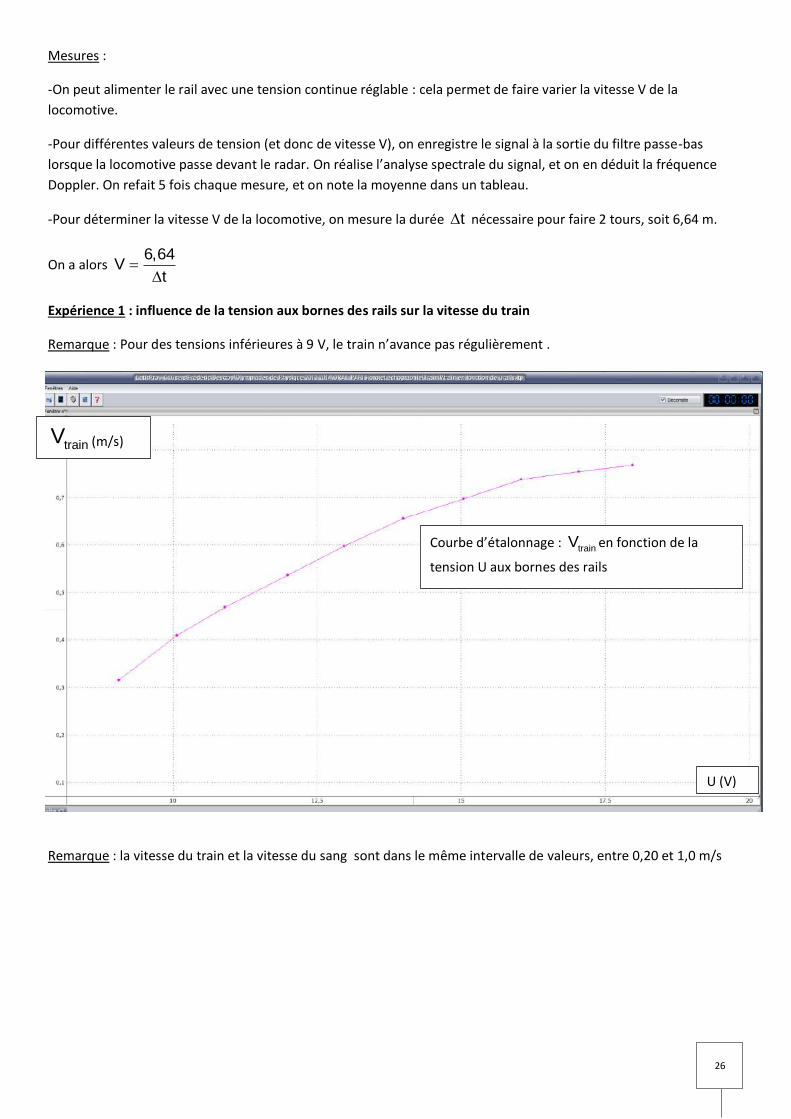
Expérience 1 : influence de la tension aux bornes des rails sur la vitesse du train
Remarque : Pour des tensions inférieures à 9 V, le train n’avance pas régulièrement .
Remarque : la vitesse du train et la vitesse du sang sont dans le même intervalle de valeurs, entre 0,20 et 1,0 m/s
Courbe d’étalonnage : train
V en fonction de la
tension U aux bornes des rails
trainV (m/s)
U (V)
27
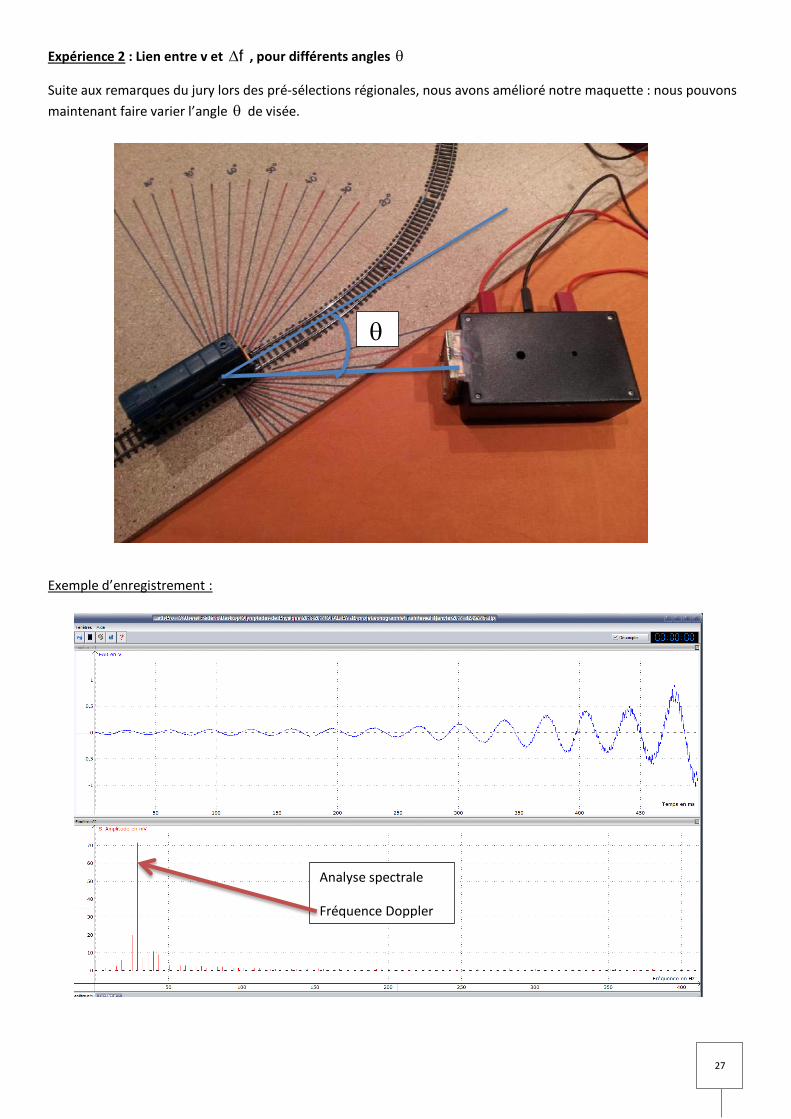
Expérience 2 : Lien entre v et f , pour différents angles
Suite aux remarques du jury lors des pré-sélections régionales, nous avons amélioré notre maquette : nous pouvons
maintenant faire varier l’angle de visée.
Exemple d’enregistrement :
Analyse spectrale
Fréquence Doppler
28
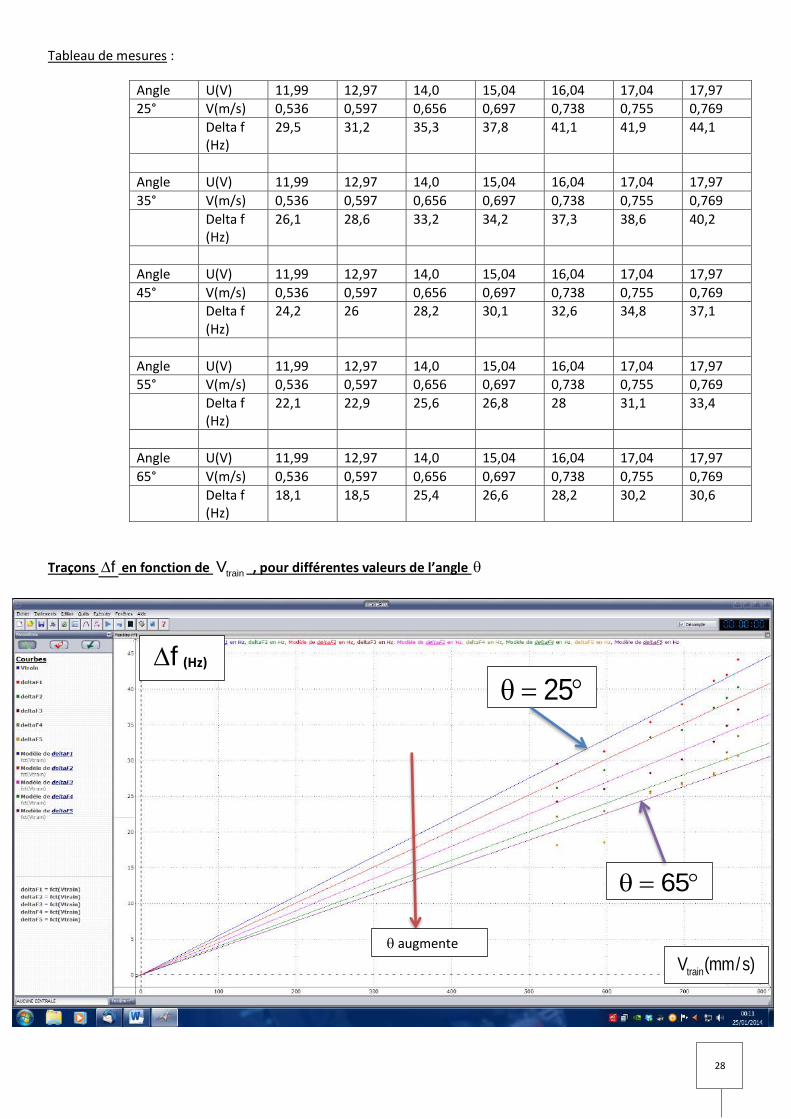
Tableau de mesures :
Angle U(V) 11,99 12,97 14,0 15,04 16,04 17,04 17,97
25° V(m/s) 0,536 0,597 0,656 0,697 0,738 0,755 0,769
Delta f (Hz)
29,5 31,2 35,3 37,8 41,1 41,9 44,1
Angle U(V) 11,99 12,97 14,0 15,04 16,04 17,04 17,97
35° V(m/s) 0,536 0,597 0,656 0,697 0,738 0,755 0,769
Delta f (Hz)
26,1 28,6 33,2 34,2 37,3 38,6 40,2
Angle U(V) 11,99 12,97 14,0 15,04 16,04 17,04 17,97
45° V(m/s) 0,536 0,597 0,656 0,697 0,738 0,755 0,769
Delta f (Hz)
24,2 26 28,2 30,1 32,6 34,8 37,1
Angle U(V) 11,99 12,97 14,0 15,04 16,04 17,04 17,97
55° V(m/s) 0,536 0,597 0,656 0,697 0,738 0,755 0,769
Delta f (Hz)
22,1 22,9 25,6 26,8 28 31,1 33,4
Angle U(V) 11,99 12,97 14,0 15,04 16,04 17,04 17,97
65° V(m/s) 0,536 0,597 0,656 0,697 0,738 0,755 0,769
Delta f (Hz)
18,1 18,5 25,4 26,6 28,2 30,2 30,6
Traçons f en fonction de train
V , pour différentes valeurs de l’angle
25
65
augmente
f (Hz)
trainV (mm/s)
29
BILAN : pour compris entre 25° et 55°, il y a bien proportionnalité entre f en fonction de train
V .
Par contre, le modèle linéaire n’est pas valable pour égal à 65°.
trainf k V , avec E2 f cosk
c
, donc E2 f cos
ck
Angle (°) Coef. de correlation Coef. directeur de la droite Valeur de c ( 810 m/s)
25 0,997 55,06 3,26
35 0,997 50,32 3,22
45 0,994 44,96 3,11
55 0,991 40,06 2,84
65 0,981 37,69
En passant, ce serait dommage de passer à côté d’une méthode de mesure de la valeur de la célérité de la lumière
dans l’air :
Valeur moyenne : 8 1
moyc 3,1 10 m.s
Incertitude de répétabilité : 7
8 11,89 10U(c) 3,18 0,3 10 m.s
4
Ainsi, (soit un écart de 3% avec la valeur attendue)
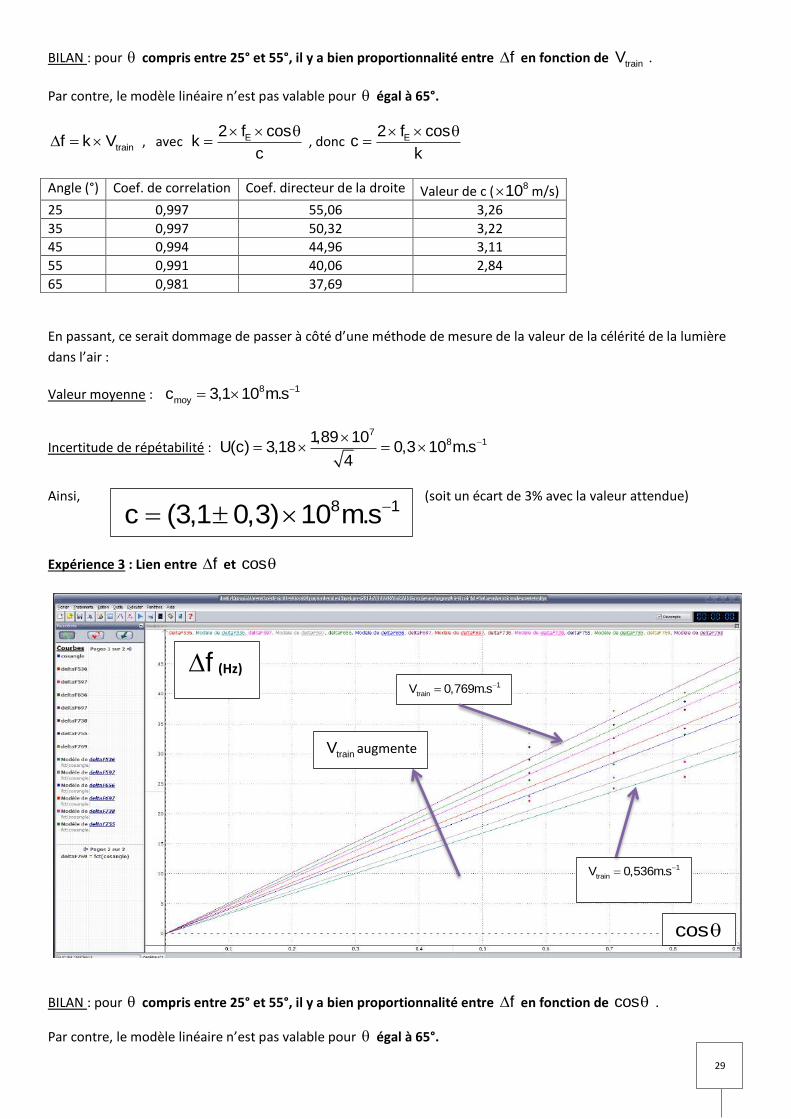
Expérience 3 : Lien entre f et cos
BILAN : pour compris entre 25° et 55°, il y a bien proportionnalité entre f en fonction de cos .
Par contre, le modèle linéaire n’est pas valable pour égal à 65°.
8 1c (3,1 0,3) 10 m.s
f (Hz) 1
trainV 0,769m.s
1
trainV 0,536m.s
trainV augmente
cos
30
f a cos , avec E train2 f Va
c
, donc E train2 f V
ca
trainV (m/s) Coef. de correlation Coef. directeur de la droite Valeur de c ( 810 m/s)
0,536 0,99 33,56 3,16
0,597 0,994 35,86 3,30
0,656 0,995 40,42 3,21
0,697 0,996 42,62 3,24
0,738 0,997 46,31 3,16
0,755 0,993 48,31 3,09
0,769 0,99 50,96 2,99
De même que précédemment, on peut en déduire la valeur de la célérité de la lumière dans l’air :
Valeur moyenne : 8 1
moyc 3,2 10 m.s
Incertitude de répétabilité : 7
8 11,02 10U(c) 2,45 0,1 10 m.s
7
Ainsi, (soit un écart de 7% avec la valeur attendue)
Mais revenons à nos moutons ! On a vérifié la proportionnalité entre f et V d’une part, et entre f et cos
d’autre part. La formule de la page 25 est donc applicable, à condition de ne pas dépasser un angle de 55°, l’idéal
étant l’angle le plus petit possible. Cependant, il est impossible pour le médecin de placer la sonde sous une
inclinaison trop faible, car il doit maintenir un bon contact entre la sonde et la peau du patient. En pratique, les
médecins utilisent des angles de visée situés entre 30 et 60°. Si on place la sonde à 90° , il n’y a plus d’effet Doppler.
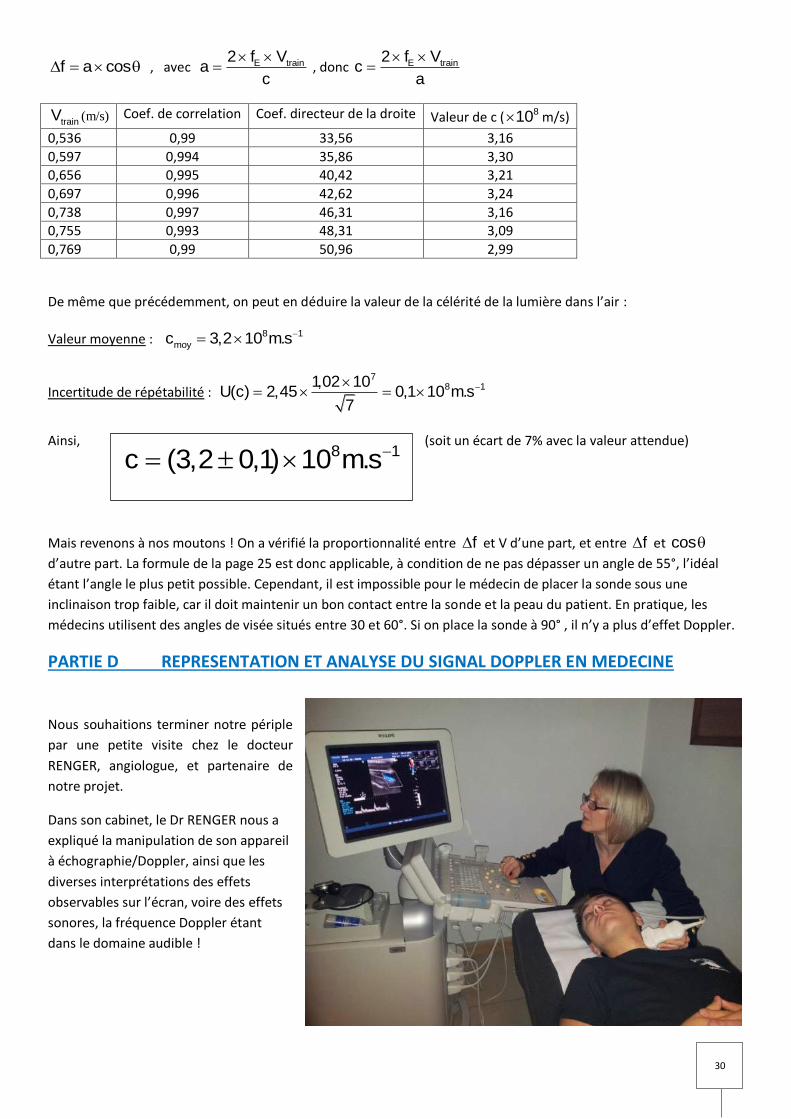
PARTIE D REPRESENTATION ET ANALYSE DU SIGNAL DOPPLER EN MEDECINE
Nous souhaitions terminer notre périple
par une petite visite chez le docteur
RENGER, angiologue, et partenaire de
notre projet.
Dans son cabinet, le Dr RENGER nous a
expliqué la manipulation de son appareil
à échographie/Doppler, ainsi que les
diverses interprétations des effets
observables sur l’écran, voire des effets
sonores, la fréquence Doppler étant
dans le domaine audible !
8 1c (3,2 0,1) 10 m.s
31
-Il est possible de réaliser simplement une échographie, afin de déterminer le diamètre d’une artère par exemple.
L’image obtenue est en niveaux de gris, de blanc pour les zones hyperéchogènes (beaucoup de réflexion des US) à
noir pour les zones anéchogènes (aucune réflexion).
Si on souhaite faire de la vélocimétrie
sanguine, il faut passer au Doppler. Il y a alors
plusieurs possibilités :
-le Doppler continu : on envoie un signal en
continu, et on reçoit un signal Doppler dont la
fréquence est dans le domaine audible. Le
médecin utilise soit la courbe image des
variations du flux sanguin, soit …ses oreilles !
Inconvénient : avec cette technique, on n’est
pas certain de viser la bonne veine.
-le Doppler pulsé : cette technique permet non
seulement de déterminer le débit sanguin,
mais également la profondeur de la structure
vasculaire.
Le Doppler couleur permet de vérifier simplement les flux : codé en rouge si le sang s’éloigne de la sonde, et en bleu
si le sang se rapproche de la sonde.
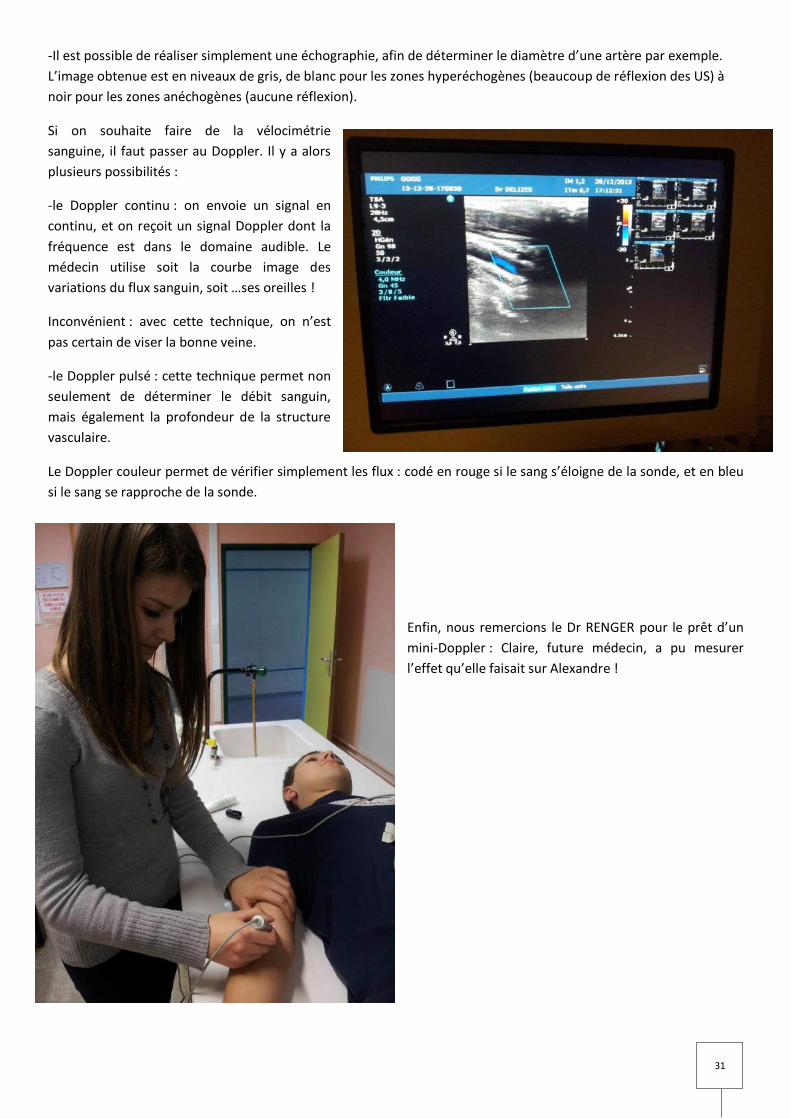
Enfin, nous remercions le Dr RENGER pour le prêt d’un
mini-Doppler : Claire, future médecin, a pu mesurer
l’effet qu’elle faisait sur Alexandre !
32
CONCLUSION
Derrière chaque appareil d’exploration médicale se trouve un phénomène physique plus ou moins complexe. La
connaissance du procédé physique de fonctionnement d’un appareil d’échographie/Doppler permet aux médecins
de comprendre et d’interpréter les données , dans le but d’établir un diagnostic.
L’application des découvertes de la physique à l’exploration du corps humain fournit aux médecins des informations
essentielles pour leurs diagnostics. Ils peuvent ainsi analyser les enregistrements de signaux électriques périodiques
émis par le cœur par exemple (électrocardiogramme). Ils disposent également des images fournies par les divers
appareils de l’imagerie médicale, qui exploitent les propriétés des ondes ultrasonores (échographie) et
électromagnétiques (fibroscopie, réflexion totale de la lumière dans une fibre optique).
Il existe, de nos jours, diverses techniques d’imageries médicales, telles les rayons X, la scintigraphie, l’IRM ou le scanner. L’imagerie 3D, comme l’échographie 3D, donne des images étonnantes du fœtus dans le ventre de la future maman. Vive la physique, vive la recherche scientifique !
REMERCIEMENTS
Nous remercions chaleureusement :
- Docteur Délizée-Renger , angiologue à St-Louis , pour ses explications concernant l’échographie, ainsi que pour les expériences effectuées dans son cabinet de consultation…et son papa, âgé de 80 ans, qui a bien voulu montrer les calcifications au niveau de sa carotide (sans conséquence majeure, heureusement !)
- M.Seiler, boucher à Carspach , pour son accueil chaleureux… entre une carcasse de chevreuil et une machine à boudin
- La gendarmerie de Kembs pour sa collaboration, et plus particulièrement le Maréchal des Logis-Chef Calmettes qui a fermé les yeux…et les oreilles, lors de nos excès de vitesse..et de bruit !
- M.Martin et M.Heinis , nos professeurs de physique-chimie…très très patients - M.Kolb, professeur de physique-chimie au lycée Mermoz de St-Louis - M.Muller, professeur de physique appliquée au lycée Louis Armand de Mulhouse, qui nous a rappelé les
bases de la soudure à l’étain (mais ça revient vite !) - Mme Calmettes, technicienne de laboratoire du lycée - M. Feltz et M.Millet, respectivement proviseur et proviseur-adjoint du lycée Henner d’Altkirch pour leur
soutien - Nos camarades de classe, qui ont joué le rôle du jury : pas toujours sympathiques, les copains ! Mais c’était
pour notre bien, disaient-ils !
BIBLIOGRAPHIE-WEBOGRAPHIE
- Acquisition et traitement de données biomédicales , cour de l’UTC Compiègne - Approche expérimentale de l’échographie (TP de master, université de Montpellier) - Livre de PC de 2nde et 1STI2D , nouveaux programmes , collection Hachette
http://www.atlasducorpshumain.fr/Coeur-et-vaisseaux/ http://www.physionet.org/physiobank/database/ptbdb/ http://www-sante.ujf-grenoble.fr/SANTE/CardioCD/cardio/ http://www.med.univ-rennes1.fr/cerf/edicerf/BASES/BA003_idx.htmlhttp://eurserveur.insa-
lyon.fr/LesCours/physique/AppPhysique/approphys/6applications/imagerie/Imagerie%20finale/sono%20home.html
http://www.ostralo.net/3_animations/swf/echographie.swf

33
ANNEXE
Notion de résolution d’une image échographique : exploration du ventre de la maman
Comment concrètement reproduire l’image d’objets dissimulés au regard en utilisant des ultrasons. Afin d’appréhender simplement la problématique du codage de l’image, il est nécessaire de concevoir une maquette . Le matériel utilisé Un bloc de laine de roche est posé au fond d’une boîte en bois. Un objet rectangulaire en bois est posé sur la laine de roche. Le dispositif est recouvert d’une fine feuille découpée aux dimensions de la boîte et qui permet de masquer la forme de l’objet. Un quadrillage régulier a été dessiné sur cette feuille.
Exploitation du dispositif expérimental Un objet est masqué à l’intérieur de la boîte par la fine feuille. Le dispositif d’exploration par ultrasons est constitué d’un boîtier émetteur-récepteur. L’exploration de la boîte est faite carré par carré en observant le signal issu du récepteur sur l’écran du PC.
Emetteur-récepteur pour l’ « échographie »
34
On procède à une exploration préalable de la surface et on constate, pour certains carrés : - la réflexion d’un signal de faible amplitude : on se trouve au-dessus de la laine de roche, «tissu mou»
ou - la réflexion d’un signal de forte amplitude : on est donc au-dessus de l’objet dur, réfléchissant, « un os ».
Intervention pertinente d’Alexandre : « Tiens, on est tombé sur un os ! »
On procède alors à une exploration systématique de tous les carrés et on regroupe les résultats sur un quadrillage identique . On choisit pour cela un code binaire simple : un niveau gris est associé à un écho de forte amplitude, un niveau blanc à un écho de faible amplitude. On peut faire l’analogie entre ces derniers et les pixels d’un écran informatique. Il faut également préciser que les outils de traitement de l’image associés aux échographes réels permettent de gérer un très grand nombre de niveaux de gris. On voit alors progressivement se former l’image d’un objet. Une fois l’exploration terminée, on enlève l’enveloppe supérieure du système pour montrer que l’image construire à l’aide de l’exploration par ultrasons est bien celle de l’objet présent.
35
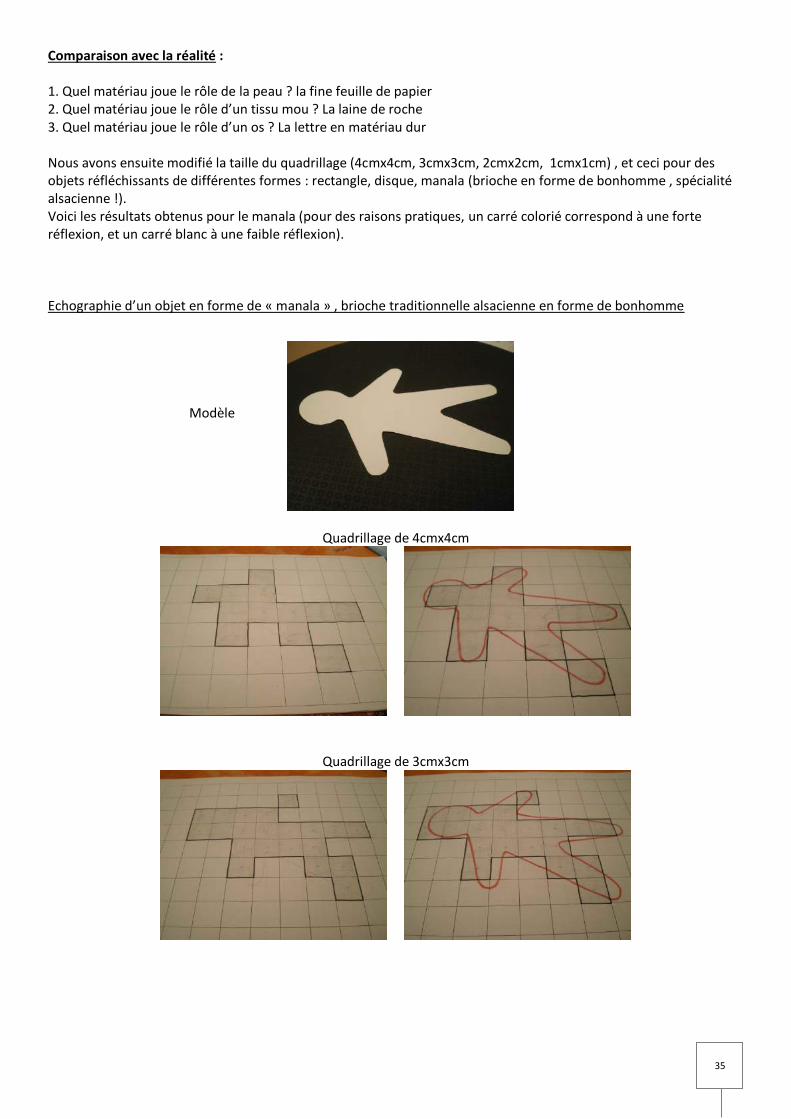
Comparaison avec la réalité : 1. Quel matériau joue le rôle de la peau ? la fine feuille de papier 2. Quel matériau joue le rôle d’un tissu mou ? La laine de roche 3. Quel matériau joue le rôle d’un os ? La lettre en matériau dur Nous avons ensuite modifié la taille du quadrillage (4cmx4cm, 3cmx3cm, 2cmx2cm, 1cmx1cm) , et ceci pour des objets réfléchissants de différentes formes : rectangle, disque, manala (brioche en forme de bonhomme , spécialité alsacienne !). Voici les résultats obtenus pour le manala (pour des raisons pratiques, un carré colorié correspond à une forte réflexion, et un carré blanc à une faible réflexion). Echographie d’un objet en forme de « manala » , brioche traditionnelle alsacienne en forme de bonhomme Modèle
Quadrillage de 4cmx4cm
Quadrillage de 3cmx3cm
36
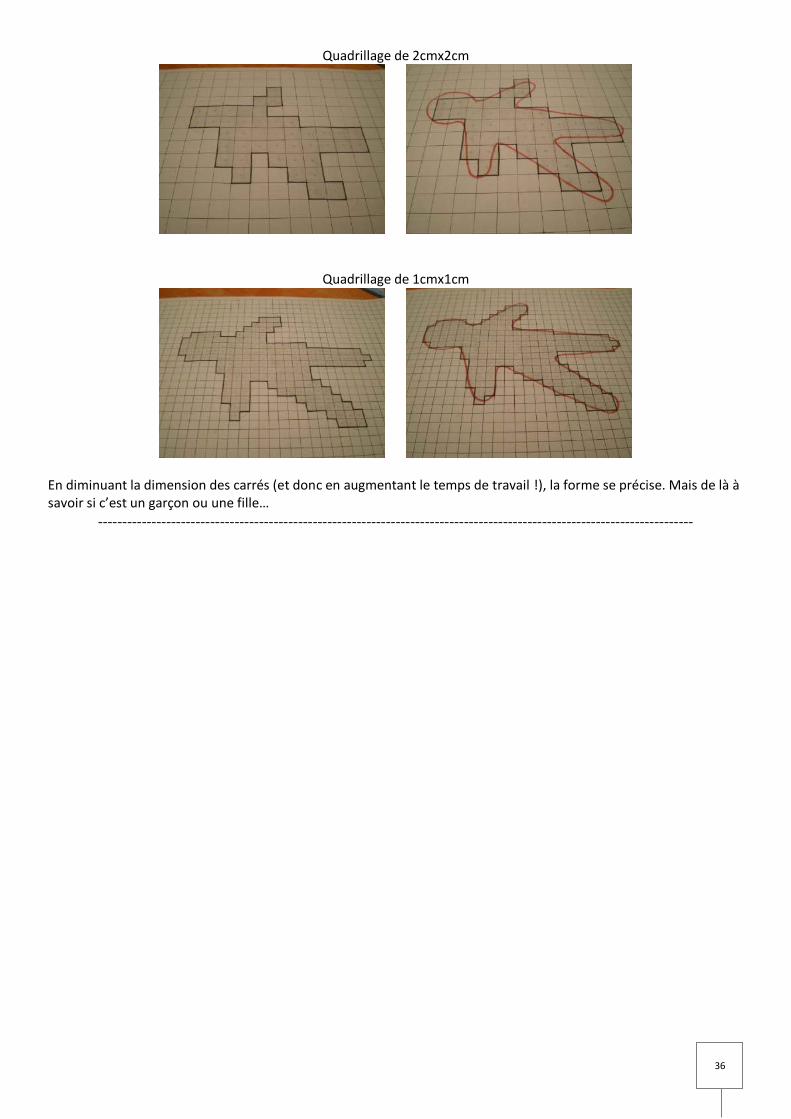
Quadrillage de 2cmx2cm
Quadrillage de 1cmx1cm
En diminuant la dimension des carrés (et donc en augmentant le temps de travail !), la forme se précise. Mais de là à savoir si c’est un garçon ou une fille…
--------------------------------------------------------------------------------------------------------------------------