
A. ETUDE DYNAMIQUE -...
10
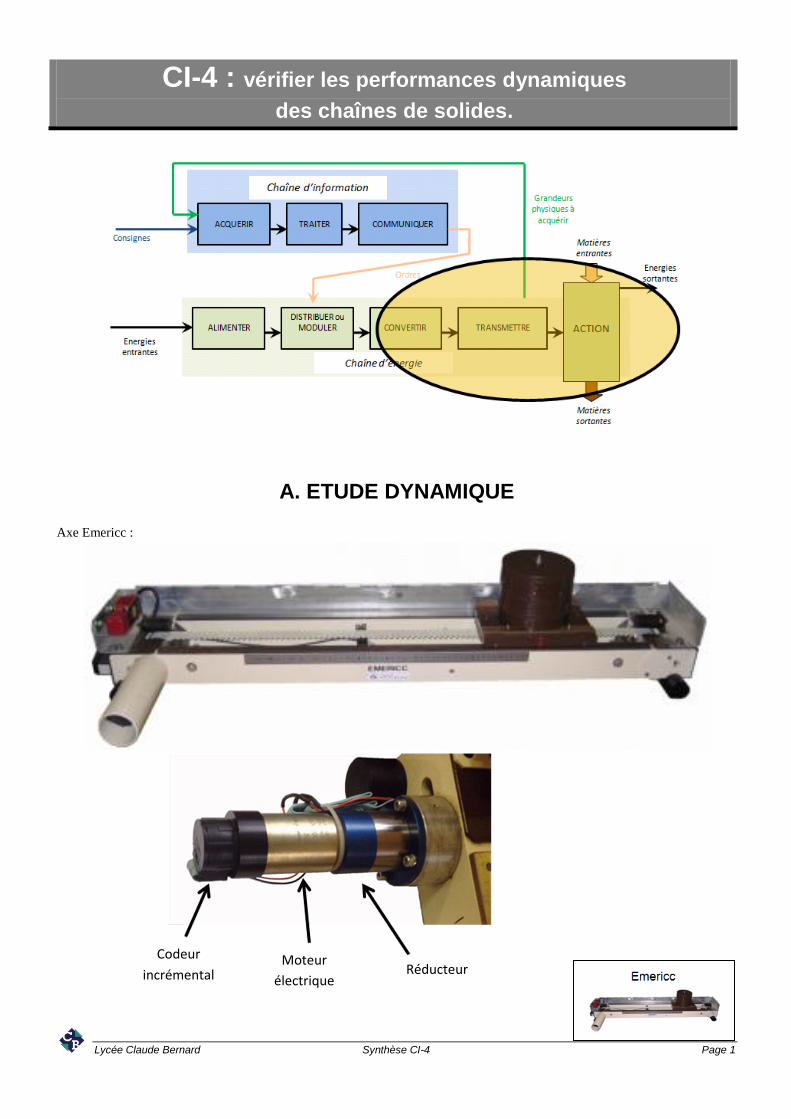
Lycée Claude Bernard Synthèse CI-4 Page 1 CI-4 : vérifier les performances dynamiques des chaînes de solides. A. ETUDE DYNAMIQUE Axe Emericc : Codeur incrémental Moteur électrique Réducteur
-
Upload
trinhtuong -
Category
Documents
-
view
216 -
download
1
Transcript of A. ETUDE DYNAMIQUE -...
Lycée Claude Bernard Synthèse CI-4 Page 1
CI-4 : vérifier les performances dynamiques
des chaînes de solides.
A. ETUDE DYNAMIQUE
Axe Emericc :
Codeur
incrémental Moteur
électrique Réducteur
Lycée Claude Bernard Synthèse CI-4 Page 2
r RpU
+-
1
RcK ?
cK
m red V
moteur
I Cm
réducteur poulie
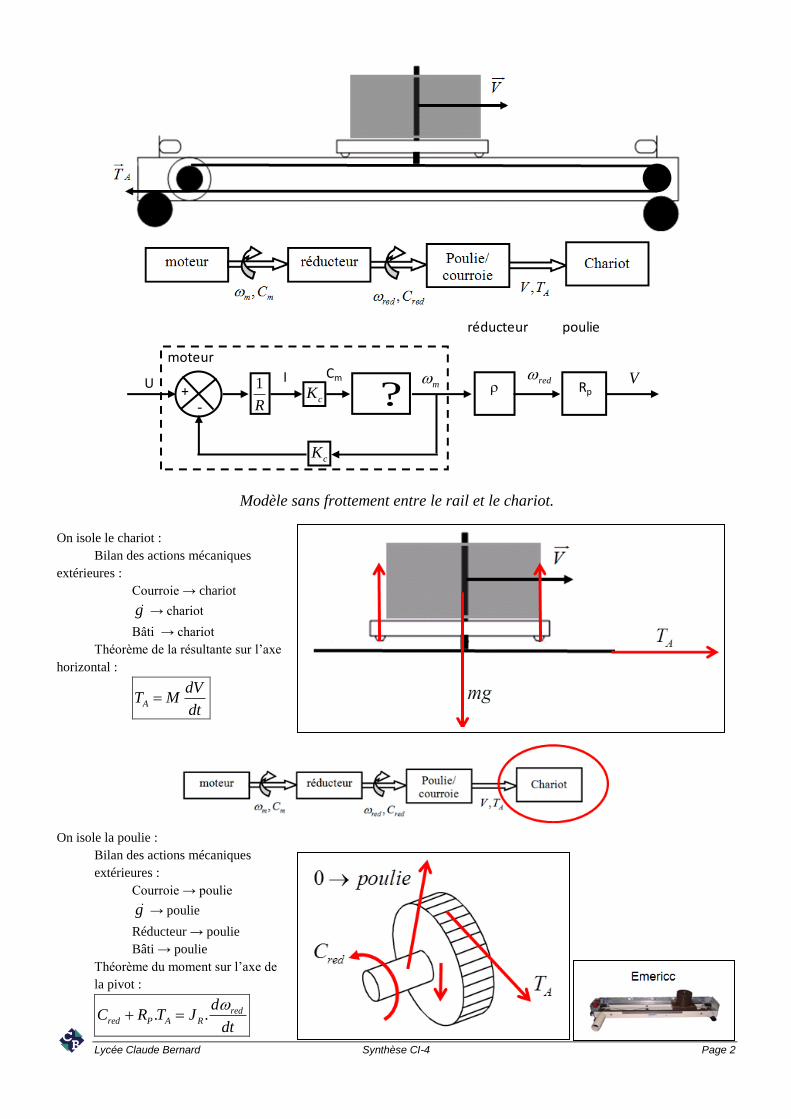
Modèle sans frottement entre le rail et le chariot.
On isole le chariot :
Bilan des actions mécaniques
extérieures :
Courroie → chariot
g → chariot
Bâti → chariot
Théorème de la résultante sur l’axe
horizontal :
A
dVT M
dt
On isole la poulie :
Bilan des actions mécaniques
extérieures :
Courroie → poulie
g → poulie
Réducteur → poulie
Bâti → poulie
Théorème du moment sur l’axe de
la pivot :
. . redred P A R
dC R T J
dt
Lycée Claude Bernard Synthèse CI-4 Page 3
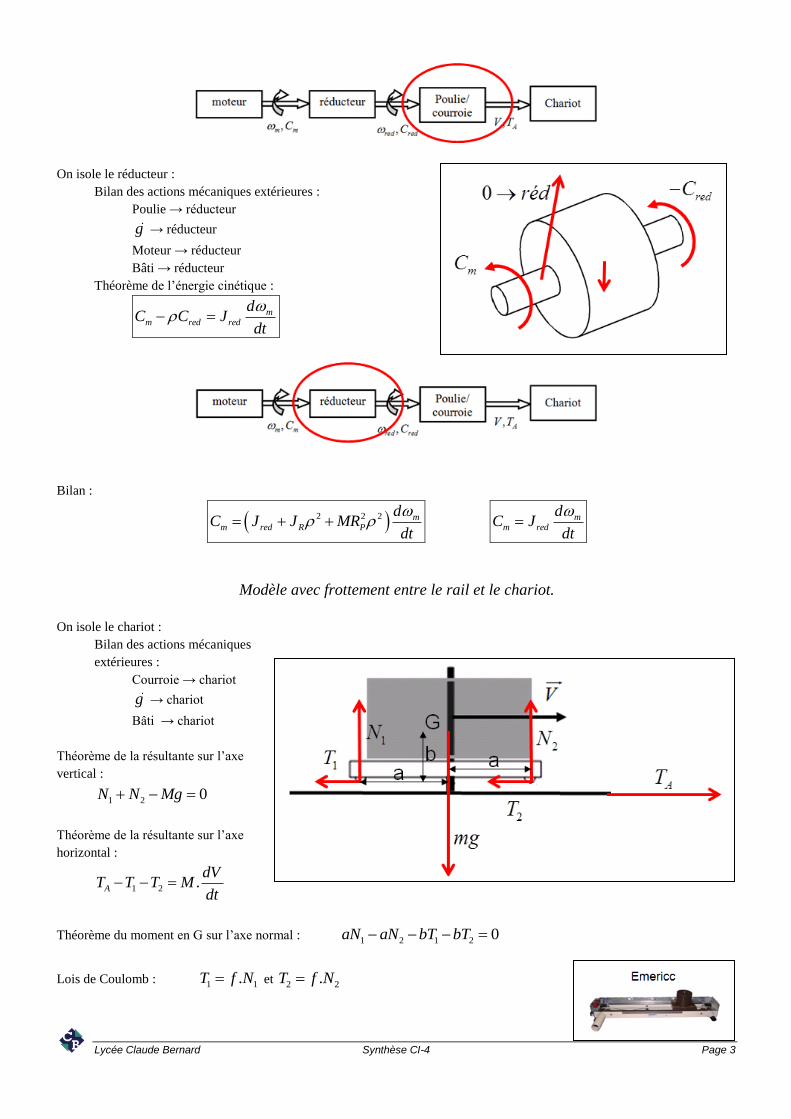
On isole le réducteur :
Bilan des actions mécaniques extérieures :
Poulie → réducteur
g → réducteur
Moteur → réducteur
Bâti → réducteur
Théorème de l’énergie cinétique :
m
m red red
dC C J
dt
r
Bilan :
2 2 2 mm red R P
dC J J MR
dt
r r
mm red
dC J
dt
Modèle avec frottement entre le rail et le chariot.
On isole le chariot :
Bilan des actions mécaniques
extérieures :
Courroie → chariot
g → chariot
Bâti → chariot
Théorème de la résultante sur l’axe
vertical :
1 2 0N N Mg
Théorème de la résultante sur l’axe
horizontal :
1 2 .A
dVT T T M
dt
Théorème du moment en G sur l’axe normal : 1 2 1 2 0aN aN bT bT
Lois de Coulomb : 1 1.T f N et 2 2.T f N
Lycée Claude Bernard Synthèse CI-4 Page 4
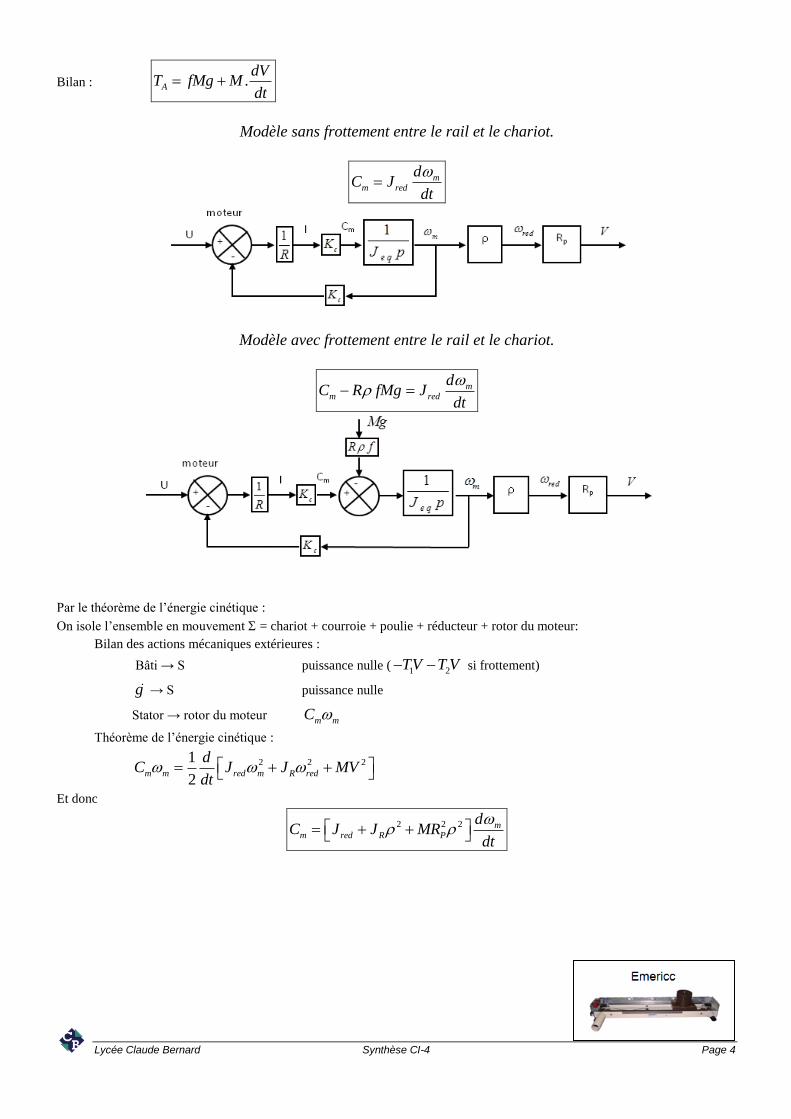
Bilan : .A
dVT fMg M
dt
Modèle sans frottement entre le rail et le chariot.
mm red
dC J
dt
Modèle avec frottement entre le rail et le chariot.
mm red
dC R fMg J
dt
r
Par le théorème de l’énergie cinétique :
On isole l’ensemble en mouvement = chariot + courroie + poulie + réducteur + rotor du moteur:
Bilan des actions mécaniques extérieures :
Bâti → S puissance nulle ( 1 2TV T V si frottement)
g → S puissance nulle
Stator → rotor du moteur m mC
Théorème de l’énergie cinétique :
2 2 21
2m m red m R red
dC J J MV
dt
Et donc
2 2 2 mm red R P
dC J J MR
dt
r r

Lycée Claude Bernard Synthèse CI-4 Page 5
Cheville du robot NAO
Mouvement de l’axe du tangage dans un plan horizontal :
Expression de l’inertie équivalente :
2
2
1eq O motJ J L M J
r
Réponse temporelle pour une même entrée (0,4) en fonction des différentes masses présentes :
Lycée Claude Bernard Synthèse CI-4 Page 6
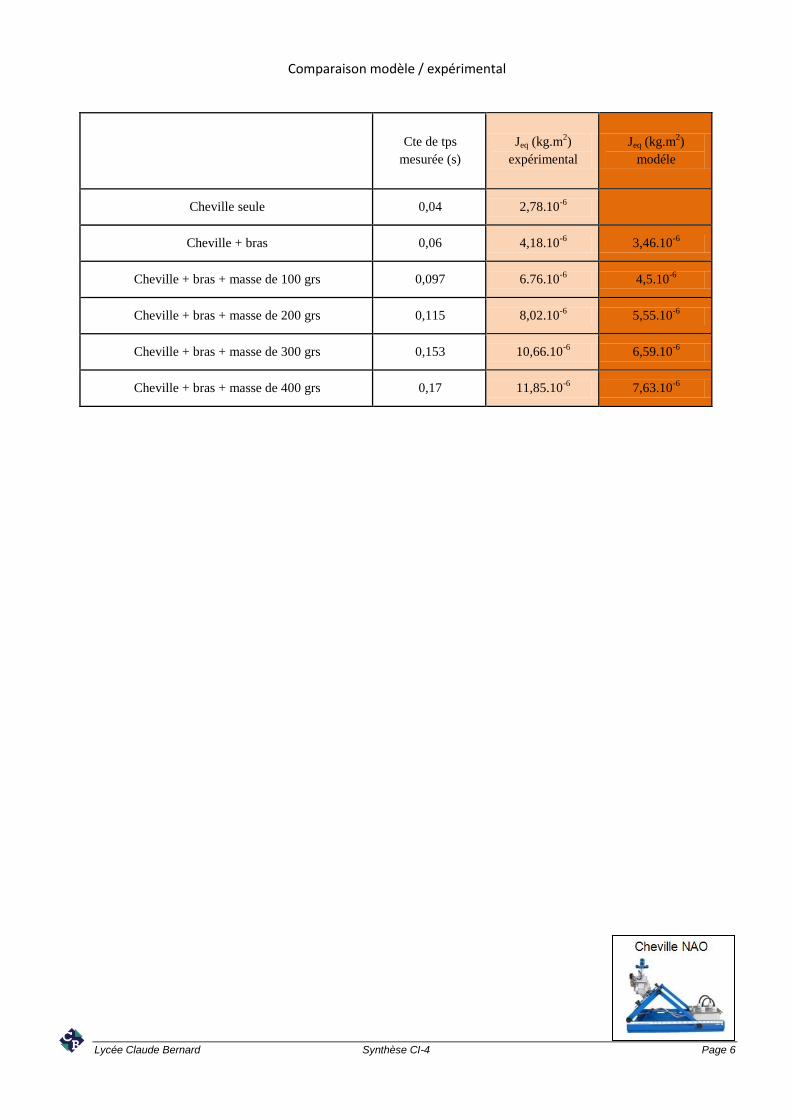
Comparaison modèle / expérimental
Cte de tps
mesurée (s)
Jeq (kg.m2)
expérimental
Jeq (kg.m2)
modéle
Cheville seule 0,04 2,78.10-6
Cheville + bras 0,06 4,18.10-6
3,46.10-6
Cheville + bras + masse de 100 grs 0,097 6.76.10-6
4,5.10-6
Cheville + bras + masse de 200 grs 0,115 8,02.10-6
5,55.10-6
Cheville + bras + masse de 300 grs 0,153 10,66.10-6
6,59.10-6
Cheville + bras + masse de 400 grs 0,17 11,85.10-6
7,63.10-6
Lycée Claude Bernard Synthèse CI-4 Page 7
Lycée Claude Bernard Synthèse CI-4 Page 8
Lycée Claude Bernard Synthèse CI-4 Page 9
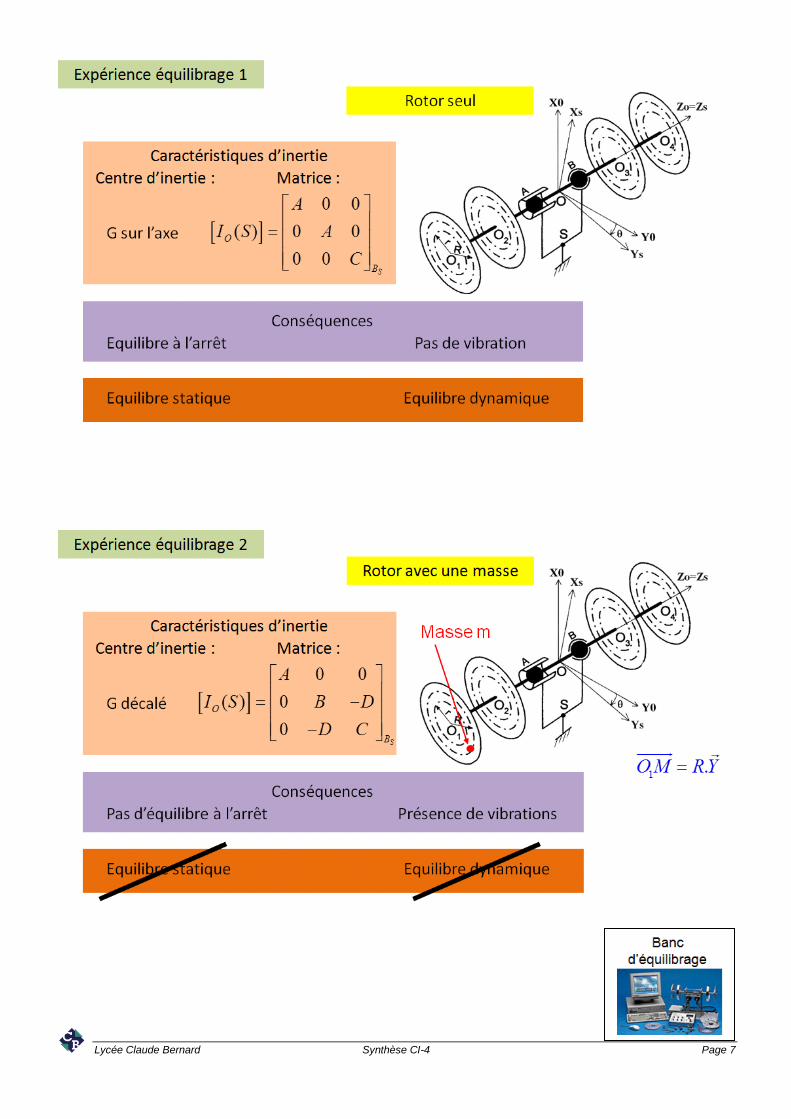
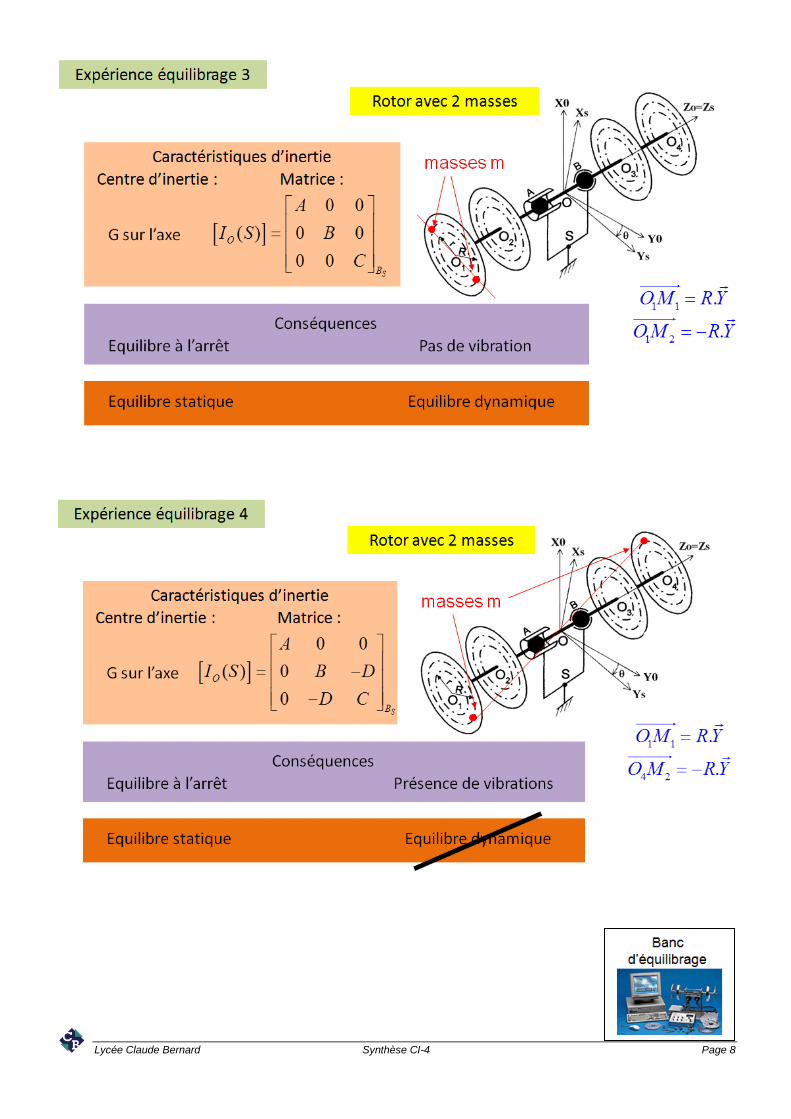
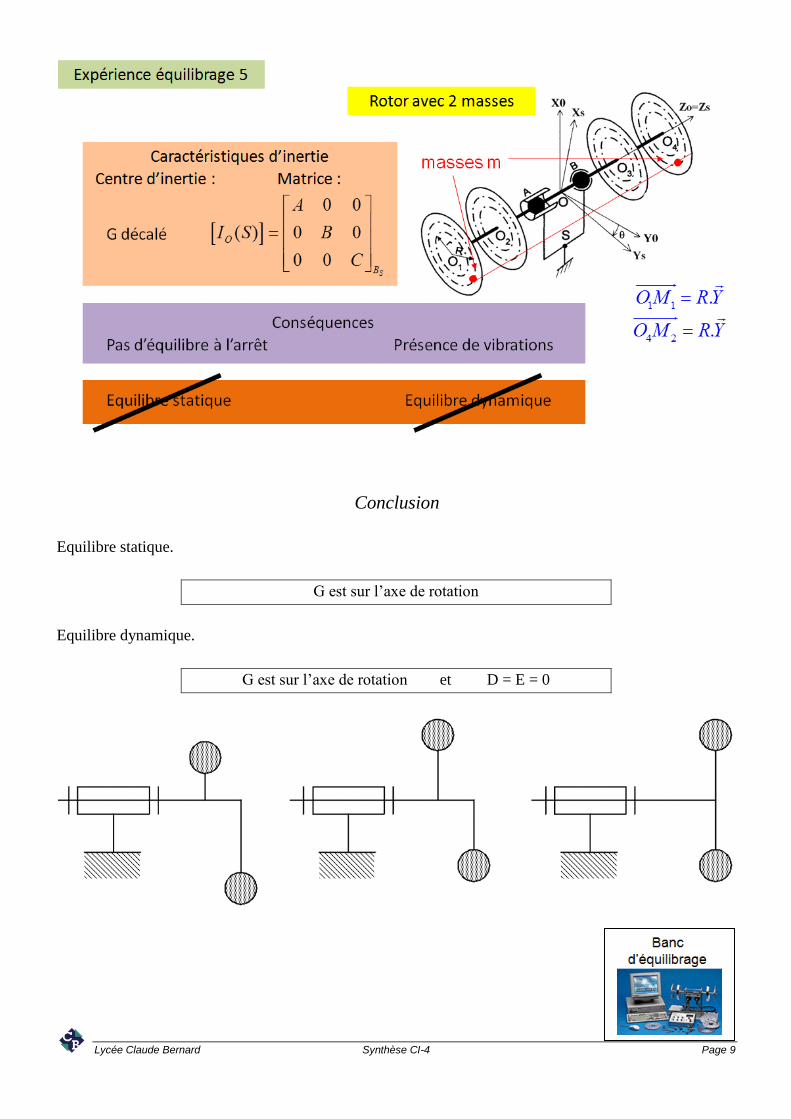
Conclusion
Equilibre statique.
G est sur l’axe de rotation
Equilibre dynamique.
G est sur l’axe de rotation et D = E = 0
Lycée Claude Bernard Synthèse CI-4 Page 10
Exemple :





![Installation redondance base de données MySQL&MariaDB · z } Z v & v µ r d^ ^/K ^/^Z ï l ó z } Z v & v µ t d^ ^/K ^/^Z / v o o ] } v } v v } v v D Ç^Y> l D ]](https://static.fdocuments.fr/doc/165x107/60a3d9e5c25a737e9016d163/installation-redondance-base-de-donnfes-mysqlmariadb-z-z-v-v-.jpg)

!['Ks ZED Ed K& /E / U D/E/^dZz K& Z />t z^ U Z />t z Z Zh ... · & ] & o } } U D ' µ P Z ] o Á Ç ^ ] } v U Z u t ï ô ì ì ì î X t ] X Á Á Á X Z u X P } À X ] v U W Z }](https://static.fdocuments.fr/doc/165x107/5f31c765825a344c9b48f016/ks-zed-ed-k-e-u-dedzz-k-z-t-z-u-z-t-z-z-zh-.jpg)

![DhE/ /W/K ^ E W ZK ' Z ' Z / / v ( } u o í v } o ï í ] ] u ... · , yh & , ehd x e k ekd z > e k wzks x ekd z wzks x z& /dwkzd ke wdk ò ì ì ì ì ì ì í ì î ì í õ ì](https://static.fdocuments.fr/doc/165x107/60bbe16fd34c9c14492d5844/dhe-wk-e-w-zk-z-z-v-u-o-v-o-u-yh-ehd.jpg)
![Z - geologia.ufc.br · ' k>k'/ wzks1e / d/e z > Æ µ } K P v ] Ì o } ^ ' ^ µ v Z h& } u } ] } } t o o & µ v t^ ' h v ] À ] & o }](https://static.fdocuments.fr/doc/165x107/5ec3c65c4f11ed607974f02b/z-kk-wzks1e-de-z-k-p-v-oe-o-v-z-h-.jpg)

![W v ] } v µ o } u Z Z } v o î ì í õ í ì - ObsAR · ZKD dZ ^ , d^ Z ^WKE^ > ^ î ì í õ í X D d,K K>K'/ d WZK&/> ^ Z WKE Ed^ î X KEd yd d 'Khs ZE E ^ , d^ Z ^WKE^ > ^ ï](https://static.fdocuments.fr/doc/165x107/5e74cc7ac675a0159769db3a/w-v-v-o-u-z-z-v-o-obsar-zkd-dz-d-z-wke-.jpg)
![2019 01 25 QPGAS ProEnergia ver trackchangesdocuments.worldbank.org/curated/en/...D/E/^d Z/K K^ Z hZ^K^ D/E Z /^ E Z'/ W } i } v P ] d } } ~W } v P ] Y µ } W } o _ ] ' } u ] v o ^](https://static.fdocuments.fr/doc/165x107/5e9553dfcdb01366dd76dee7/2019-01-25-qpgas-proenergia-ver-t-ded-zk-k-z-hzk-de-z-e-z-w-i.jpg)


![FR010.h - Portail interministériel sur l'assainissement ... · Y ] v ] u v µ Æ µ Y ] } ] ] ( [ E À P u v v ] } v o t ' u u /K&Z E /K&Z E Z } }](https://static.fdocuments.fr/doc/165x107/5f5cb904149ea735560cbcd7/fr010h-portail-interministriel-sur-lassainissement-y-v-u-v-.jpg)