5 td11 chariot
2
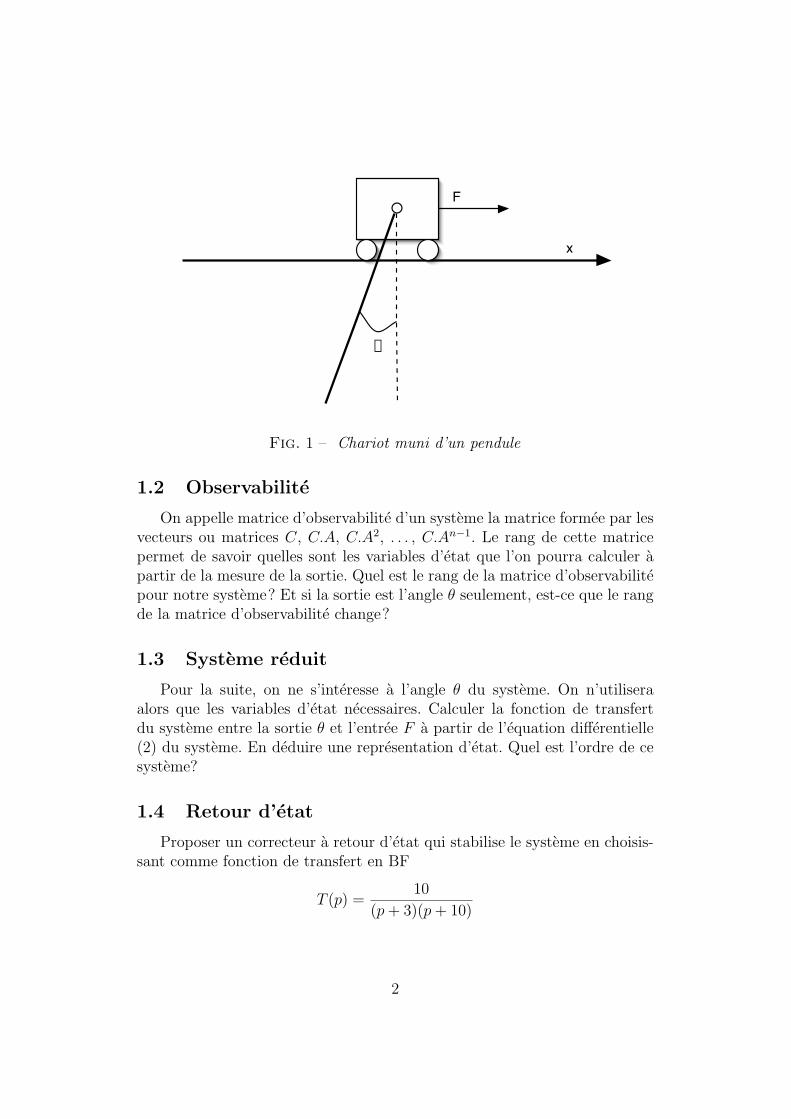
TD SA 11 Repr´ esentation d’´ etat d’un pendule TD ` a rendre pour le 17 D´ ecembre 2004 1 Chariot et pendule Un pendule est accroch´ e` a un chariot. On veut asservir la position du chariot et r´ eguler l’angle du pendule. Ce syst` eme est mis en mouvement par un moteur pouvant d´ eplacer le chariot. Pour simplifier, la commande sera la force F horizontale appliqu´ ee au chariot. Les ´ equations m´ ecaniques donnant l’´ evolution de la position x du chariot et de l’angle θ du pendule sont non lin´ eaires. Si l’angle du pendule est petit, ces ´ equations se lin´ earisent et donnent : m c ¨ x = -m p gθ + F (1) m c l p ¨ θ = -(m c + m p )gθ + F (2) o` u: – m p = 100g est la masse du pendule – m c = 200g est la masse du chariot – g = 10ms -2 est l’acc´ el´ eration dˆ ue ` a l’attraction terrestre – l p = 50cm est la demi-longueur du pendule 1.1 Repr´ esentation d’´ etat Donner une repr´ esentation d’´ etat de ce syst` eme qui a une entr´ ee : la force F appliqu´ ee au chariot et deux sorties : la position x et l’angle θ. On choisira d’utiliser les variables physiques. Les deux premi` eres variables d’´ etat devront ˆ etre x et θ. Donner l’ordre de ce syst` eme. 1
-
Upload
mayssa-rjaibia -
Category
Engineering
-
view
17 -
download
2
Transcript of 5 td11 chariot

TD SA 11Representation d’etat d’un pendule
TD a rendre pour le
17 Decembre 2004
1 Chariot et pendule
Un pendule est accroche a un chariot. On veut asservir la position duchariot et reguler l’angle du pendule. Ce systeme est mis en mouvementpar un moteur pouvant deplacer le chariot. Pour simplifier, la commandesera la force F horizontale appliquee au chariot. Les equations mecaniquesdonnant l’evolution de la position x du chariot et de l’angle θ du pendulesont non lineaires. Si l’angle du pendule est petit, ces equations se linearisentet donnent :
mcx = −mpgθ + F (1)
mclpθ = −(mc + mp)gθ + F (2)
ou :
– mp = 100g est la masse du pendule
– mc = 200g est la masse du chariot
– g = 10ms−2 est l’acceleration due a l’attraction terrestre
– lp = 50cm est la demi-longueur du pendule
1.1 Representation d’etat
Donner une representation d’etat de ce systeme qui a une entree : la forceF appliquee au chariot et deux sorties : la position x et l’angle θ. On choisirad’utiliser les variables physiques. Les deux premieres variables d’etat devrontetre x et θ. Donner l’ordre de ce systeme.
1
q
F
x
Fig. 1 – Chariot muni d’un pendule
1.2 Observabilite
On appelle matrice d’observabilite d’un systeme la matrice formee par lesvecteurs ou matrices C, C.A, C.A2, . . . , C.An−1. Le rang de cette matricepermet de savoir quelles sont les variables d’etat que l’on pourra calculer apartir de la mesure de la sortie. Quel est le rang de la matrice d’observabilitepour notre systeme? Et si la sortie est l’angle θ seulement, est-ce que le rangde la matrice d’observabilite change?
1.3 Systeme reduit
Pour la suite, on ne s’interesse a l’angle θ du systeme. On n’utiliseraalors que les variables d’etat necessaires. Calculer la fonction de transfertdu systeme entre la sortie θ et l’entree F a partir de l’equation differentielle(2) du systeme. En deduire une representation d’etat. Quel est l’ordre de cesysteme?
1.4 Retour d’etat
Proposer un correcteur a retour d’etat qui stabilise le systeme en choisis-sant comme fonction de transfert en BF
T (p) =10
(p + 3)(p + 10)
2