Chap. 13 de Howell: Analyse factorielle de variance: Principes dexpérimentation.

of 24
Upload
zakaria-abCategory
view
226download
08/20/2019 13 Analyse Contraintes
1/61
Définition du problème
minx∈Rn
f (x)
sous contraintesh(x) = 0,
g(x) ≤ 0,
x ∈ X.
• f : Rn → R, n > 0
• h : Rn → Rm, m ≥ 0
• g : Rn → R p, p ≥ 0
• X ⊆ Rn ensemble convexe
Anal se des contraintes – . 1
8/20/2019 13 Analyse Contraintes
2/61
Anal se des contraintes . 1
Définition du problème
Point admissibleSoit le problème d’optimisation ci-dessus. Un point x ∈ Rn est dit admissible
s’il vérifie toutes les contraintes.
Anal se des contraintes – . 2
8/20/2019 13 Analyse Contraintes
3/61
Analyse des contraintes
• Contraintes actives
• Indépendance linéaire des contraintes
• Directions admissibles
• Elimination des contraintes
Anal se des contraintes – . 3
8/20/2019 13 Analyse Contraintes
4/61
Contraintes actives
minx∈R
x2
s.c.x ≤ 4
x ≥ −10
Solution : x
∗
= 0
Anal se des contraintes – . 4
8/20/2019 13 Analyse Contraintes
5/61
Contraintes actives
-10 -5 0 5 10
f
( x )
x
f (x) = x2
x∗ = 0
-10 -5 0 5 10
f
( x )
x
f (x) = x2
x∗ = 0
-10 -5 0 5 10
f
( x )
x
f (x) = x2
x∗ = 0
Anal se des contraintes – . 5
8/20/2019 13 Analyse Contraintes
6/61
Contraintes actives
minx∈R
x2
s.c.x ≤ 4
x ≥ −10
minx∈R
x2
s.c.
g1(x) = x − 4 ≤ 0
g2(x) = −x − 10 ≤ 0
x∗ = 0
g1(x∗) = −4
8/20/2019 13 Analyse Contraintes
7/61
Contraintes actives
minx∈R
x2
s.c.x ≤ 4
x ≥ 1
Solution : x
∗
= 1
Anal se des contraintes – . 7
8/20/2019 13 Analyse Contraintes
8/61
Contraintes actives
-4 -2 0 2 4
f
( x )
x
f (x) = x2
x∗ = 1
-4 -2 0 2 4
f
( x )
x
f (x) = x2
x∗ = 1
-4 -2 0 2 4
f
( x )
x
f (x) = x2
x∗ = 1
Anal se des contraintes – . 8
8/20/2019 13 Analyse Contraintes
9/61
Contraintes actives
minx∈R
x2
s.c.x ≤ 4
x ≥ 1
minx∈R
x2
s.c.
g1(x) = x − 4 ≤ 0
g2(x) = 1 − x ≤ 0
x∗ = 1
g1(x∗) = −3
8/20/2019 13 Analyse Contraintes
10/61
Contraintes actives
Contraintes activesSoient g : Rn → R et h : Rn → R. Une contrainte d’inégalité
g(x) ≤ 0
est dite active en x∗ si
g(x∗) = 0,
et inactive en x∗ si
g(x∗)
8/20/2019 13 Analyse Contraintes
11/61
Contraintes actives
Contraintes actives (suite)
Par extension, une contrainte d’égalité
h(x) = 0
sera dite active en x∗ si elle est vérifiée en x∗, c’est-à-dire si
h(x∗) = 0.
L’ensemble des indices des contraintes actives en x∗ sera généralement noté A(x∗).
Anal se des contraintes – . 11
8/20/2019 13 Analyse Contraintes
12/61
Contraintes actives
Contraintes actives Soit un vecteur x∗ ∈ Rn. Soit le problème d’optimisation P 1,
minx∈Rn
f (x)
sous contraintes
g(x) ≤ 0,
x ∈ Y ⊆ Rn
.
avec g : Rn −→ Rm et Y est un sous-ensemble de Rn.
(suite)
Anal se des contraintes – . 12
8/20/2019 13 Analyse Contraintes
13/61
Contraintes actives
Contraintes actives (suite) Si x∗ est admissible, c’est-à-dire g(x∗) ≤ 0,et si A(x∗) ⊆ {1, . . . , p} est l’ensemble des indices des contraintes actives en x∗, c’est-à-dire
A(x∗) = {i|gi(x∗) = 0},
nous considérons le problème d’optimisation P 2 suivant
minx∈Rn f (x)
sous contraintes
gi(x) = 0, i ∈ A(x∗),
x ∈ Y ⊆ Rn.
Alors, x∗ est un minimum local de P 1 si et seulement si x∗ est un minimum local
de P 2.
(p. 60)
Anal se des contraintes – . 13
8/20/2019 13 Analyse Contraintes
14/61
Contraintes actives
• On peut ignorer les contraintes inactives à la solution
• On peut considérer les contraintes actives à la solution comme
des contraintes d’égalité
Anal se des contraintes – . 14
8/20/2019 13 Analyse Contraintes
15/61
Indépendance linéaire des contraintes
• Analyse des contraintes très complexe
• Nécessité de définir des hypothèses qui
• évitent les cas pathologiques,• restent générales en pratique.
• Cas linéaire : simple et intuitif
• Cas non linéaire : plus complexe
Anal se des contraintes – . 15
8/20/2019 13 Analyse Contraintes
16/61
Contraintes linéaires
min f (x)
sous contraintes
Ax = b
x ≥ 0
Système linéaire:
• incompatible, ∃x tel que Ax = b;
• sous-déterminé, un nombre infini de x tels que Ax = b
• non singulier, ∃ x unique qui vérifie Ax = b.
Anal se des contraintes – . 16
8/20/2019 13 Analyse Contraintes
17/61
Contraintes linéaires
min f (x)
sous contraintes
Ax = b
x ≥ 0
Système linéaire:
• incompatible, ∃x tel que Ax = b;
• sous-déterminé, un nombre infini de x tels que Ax = b
• non singulier, ∃ x unique qui vérifie Ax = b.
Anal se des contraintes – . 16
8/20/2019 13 Analyse Contraintes
18/61
Contraintes linéaires
Contraintes redondantes Soit un système compatible de contraintes d’égalité linéaires Ax = b, avec A ∈ Rm×n, m ≤ n.Si le rang de A est déficient, c’est-à-dire rang (A) = r < m,
alors il existe une matrice à ∈ Rr×n de rang plein (i.e. rang( Ã) = r ), composée exclusivement de lignes ℓ1, . . . , ℓr de A telle que
Ãx = b̃ ⇐⇒ Ax = b.
où b̃ est composées des éléments ℓ1, . . . , ℓr de b.
(p. 63)
Anal se des contraintes – . 17
8/20/2019 13 Analyse Contraintes
19/61
Contraintes linéaires
x1 + x2 + x3 = 1
x1 − x2 + x4 = 1
x1 − 5x2 − 2x3 + 3x4 = 1
c’est-à-dire
A =
1 1 1 01 −1 0 11 −5 −2 3
b = 111
• Système compatible :(2/3, 0, 1/3, 1/3)
• rang(A) = 2
• Combinaison linéaire : a3 = −2a1 + 3a2
Anal se des contraintes – . 18
8/20/2019 13 Analyse Contraintes
20/61
Contraintes linéaires
• On peut supprimer la contrainte 3
• Le système
x1 + x2 + x3 = 1x1 − x2 + x4 = 1
est équivalent à
x1 + x2 + x3 = 1
x1 − x2 + x4 = 1
x1 − 5x2 − 2x3 + 3x4 = 1
Anal se des contraintes – . 19
8/20/2019 13 Analyse Contraintes
21/61
Contraintes linéaires
• On peut toujours supposer que des contraintes linéaires sontlinéairement indépendantes.
• Si ce n’est pas le cas, il y a des contraintes redondantes.• Il suffit de les supprimer.
Anal se des contraintes – . 20
8/20/2019 13 Analyse Contraintes
22/61
Contraintes non linéaires
h(x) = 0
Linéarisation autour de x+ (Taylor 1er ordre)
h(x+) + ∇h(x+)T (x − x+) = 0
ou encore
∇h(x+)T x = ∇h(x+)T x+ − h(x+).
avec ∇h(x+) ∈ Rn×m, ou encore
Ax = b
avec A = ∇h(x+)T et b = ∇h(x+)T x+ − h(x+).
Anal se des contraintes – . 21
8/20/2019 13 Analyse Contraintes
23/61
Contraintes non linéaires
Les gradients des contraintes d’égalité jouent un rôle similaire auxlignes de la matrice A
Indépendance linéaire des contraintesSoit le problème d’optimisation minx∈Rn f (x) sous contraintes h(x) = 0 et
g(x) ≤ 0, et soit un point admissible x+.Nous dirons que la condition d’ indépendance linéaire des contraintes est véri-
fiée en x+ si les gradients des contraintes d’égalité et les gradients des con- traintes d’inégalité actives en x+ sont linéairement indépendants.Par abus de langage, nous dirons parfois simplement que les contraintes sont
linéairement indépendantes
Anal se des contraintes – . 22
8/20/2019 13 Analyse Contraintes
24/61
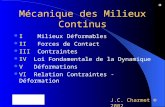
Contraintes non linéaires
Soit un problème d’optimisation dans R2 avec la contrainted’inégalité
g(x) = x
2
1 + (x2 − 1)
2
− 1 ≤ 0et la contrainte d’égalité
h(x) = x2 − x21 = 0.
Nous avons
∇g(x) = 2x12x2 − 2
et ∇h(x) = −2x11
Anal se des contraintes – . 23
8/20/2019 13 Analyse Contraintes
25/61
Contraintes non linéaires
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
x 2
x1
xb•
•xa
h(x) = x2 − x21 = 0
g(x) = x2
1 + (x2 − 1)2
− 1 = 0
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
x 2
x1
xb•
•xa
h(x) = x2 − x21 = 0
g(x) = x2
1 + (x2 − 1)2
− 1 = 0
Anal se des contraintes – . 24
8/20/2019 13 Analyse Contraintes
26/61
Directions admissibles
Direction admissibleSoit le problème général d’optimisation, et soit un point x ∈ Rn admissible.Une direction d sera dite admissible en x s’il existe η > 0 tel que x + αd soit admissible pour tout 0 < α ≤ η.
Direction admissible dans un convexe Soit X un ensemble convexe, et soient x, y ∈ X , y = x.
La direction d = y − x est une direction admissible en x et, de plus x + αd = x + α(y − x) est admissible pour tout 0 ≤ α ≤ 1.
(par définition)
Anal se des contraintes – . 25
8/20/2019 13 Analyse Contraintes
27/61
Directions admissibles
Directions admissibles : cas linéaire Soit le problème d’optimisation min f (x) sous contraintes Ax = b et x ≥ 0, et soit un point admissible x+.Une direction d est admissible si et seulement si
1. Ad = 0, et
2. di ≥ 0 si x+i = 0.
(p. 69)
Attention : la généralisation aux contraintes non linéaires est compliquée
Interprétons ce résultat en termes de gradients...
Anal se des contraintes – . 26
8/20/2019 13 Analyse Contraintes
28/61
Directions admissibles
Contraintes d’égalité
hi(x) = aT i x − bi = 0 i = 1, . . . , m .
Première condition du théorème
aT i d = 0 ou encore ∇hi(x)T d = 0 i = 1, . . . , m .
Contraintes d’inégalité
gi(x) = −xi(≤ 0) et donc ∇gi(x)T d = −di.
Seconde condition du théorème Si la contrainte gi(x) est active en
x+, alors ∇gi(x+)T d ≤ 0
Anal se des contraintes – . 27
8/20/2019 13 Analyse Contraintes
29/61
Directions admissibles
Malheureusement, la généralisation de ces résultats au cas nonlinéaire est non triviale.Notons que le gradient des contraintes pointe toujours vers
l’extérieurExemple:
g(x) = 1
2(x1 − 1)
2 + 1
2(x2 − 1)
2 − 1
2,
et donc
∇g(x) =
x1 − 1
x2 − 1
.
Anal se des contraintes – . 28
8/20/2019 13 Analyse Contraintes
30/61
Directions admissibles
Anal se des contraintes – . 29
8/20/2019 13 Analyse Contraintes
31/61
Directions admissibles
Directions admissibles : une contrainte d’inégalité Soit
g : Rn −→ R une fonction différentiable, et soit x+ ∈ Rn tel que g(x+) ≤ 0.
1. Si la contrainte g(x) ≤ 0 est inactive en x+
, alors toute direction est admissible en x.
2. Si la contrainte est active en x+, et que ∇g(x+) = 0, alors une direction d
est admissible en x+ si
∇g(x+)T d
8/20/2019 13 Analyse Contraintes
32/61
Directions admissibles
Que se passe-t-il si ∇g(x+)T d = 0.
• Soit le gradient est nul.
• Soit d est tangent à la contrainte.
Taylor:
g(x+ + αd) = g(x+) + αdT ∇g(x+) + o(αd) = o(α).
Rien ne garanti que o(α) ≤ 0.Cependant, on peut rendre ce point “aussi peu non admissible” quedésiré en choisissant un α suffisamment petit.
Il faudra donc utiliser des suites et passer à la limite.
Anal se des contraintes – . 31
8/20/2019 13 Analyse Contraintes
33/61
Directions admissibles
Contrainte d’égalité:
h(x) = 0.
On peut écrireh(x) ≤ 0
−h(x) ≤ 0.
Si x+ est admissible, ces deux contraintes d’inégalité sont actives.Cependant, aucune direction d ne peut vérifier
∇h(x+)T d
8/20/2019 13 Analyse Contraintes
34/61
Suites admissibles
Suites admissiblesConsidérons le problème d’optimisation minx∈Rn f (x) s.c. h(x) = 0,
g(x) ≤ 0 et x ∈ X , et un point x
+
∈Rn
admissible.Une suite (xk)k∈N, avec xk ∈ R
n pour tout k est appelée suite admissible
en x+ si les conditions suivantes sont vérifiées:
1. limk→∞ xk = x+,
2. il existe k0 tel que xk est admissible pour tout k ≥ k0,
3. xk = x+ pour tout k.
L’ensemble des suites admissibles en x+ est noté S a(x+).
Anal se des contraintes – . 33
8/20/2019 13 Analyse Contraintes
35/61
Suites admissibles
Considérons, dans R2, la contrainte
h(x) = x21 − x2 = 0,
et le point admissible x+ = (0, 0)T . La suite définie par
xk = 1
k1k2
vérifie les trois conditions de la définition et appartient donc à
S a(x+
).
Anal se des contraintes – . 34
8/20/2019 13 Analyse Contraintes
36/61
Suites admissibles
-1 -0.5 0 0.5 1
x 2
x1
h(x) = x21 − x2 = 0
x+ = 0
•
•
••••••••••••••••••
Anal se des contraintes – . 35
8/20/2019 13 Analyse Contraintes
37/61
Suites admissibles
Considérons une suite (xk)k admissible en x+, et relions chaque x+
à chaque xkNous obtenons des directions. En les normalisant, nous avons
dk = xk − x
+
xk − x+,
Nous notonsd = lim
k→∞dk
Anal se des contraintes – . 36
8/20/2019 13 Analyse Contraintes
38/61
Suites admissibles
-1 -0.5 0 0.5 1
x 2
x1
h(x) = x21 − x2 = 0
x+ = 0
•
•
••••••••••••••••••
d3
d2
d1
d
Anal se des contraintes – . 37
8/20/2019 13 Analyse Contraintes
39/61
Suites admissibles
Attention : le passage à la limite ne peut pas toujours se faireExemple:
h(x) = x2
1 − x2 = 0,
et le point admissible x+ = (0, 0)T . Suite admissible :
xk = (−1)kk
1k2
Anal se des contraintes – . 38
8/20/2019 13 Analyse Contraintes
40/61
Suites admissibles
-1 -0.5 0 0.5 1
x 2
x1
h(x) = x21 − x2 = 0
x+ = 0
•
•
• •• •• •• ••••••••••
d4d3
d2
d1
d′d′′
Anal se des contraintes – . 39
8/20/2019 13 Analyse Contraintes
41/61
Directions admissibles
Direction admissible à la limiteConsidérons le problème d’optimisation minx∈Rn f (x) s.c. h(x) = 0,
g(x) ≤ 0 et
x ∈ X , et un point
x
+
∈Rn admissible.
Soit (xk)k∈N une suite admissible en x+.
La direction d = 0 est une direction admissible à la limite en x+ pour la suite (xk)k∈N s’il existe une sous-suite (xki)i∈N telle que
d
d = lim
i→∞
xki − x+
xki − x+
.
Anal se des contraintes – . 40
8/20/2019 13 Analyse Contraintes
42/61
Directions admissibles
• Toute direction admissible est aussi une direction admissible àla limite
• Pour le montrer, considérer la suite admissible
xk = x+ +
1
kd
• Le concept de direction admissible est plus intuitif que celuibasé sur ∇h(x)T d
• Mais il n’est pas utilisable en pratique
• Heureusement, les deux sont liés.
Anal se des contraintes – . 41
8/20/2019 13 Analyse Contraintes
43/61
Cône des directions
Cône des directionsSoit minx∈Rn f (x) s.c. h(x) = 0, g(x) ≤ 0 et x ∈ X , et un point x
+ ∈Rn admissible.
L’ensemble constitué des directions d telles que
dT ∇gi(x+) ≤ 0, ∀i = 1, . . . , p tel que gi(x
+) = 0,
et
dT ∇hi(x+) = 0, i = 1, . . . , m ,
et de tous leurs multiples, c’est-à-dire
{αd|α > 0 et d vérifie les deux conditions ci-dessus }
est appelé cône des directions en x+ et est noté D(x+).
Anal se des contraintes – . 42
8/20/2019 13 Analyse Contraintes
44/61
Cône des directions
Directions admissibles à la limite Considérons le problème d’optimisation minx∈Rn f (x) s.c. h(x) = 0, g(x) ≤ 0 et x ∈ X et un point
x+ ∈ Rn admissible.Toute direction admissible à la limite en x+ appartient au cône des directions en x+.
(p. 78)
Anal se des contraintes – . 43
8/20/2019 13 Analyse Contraintes
45/61
Cône des directions
-1 -0.5 0 0.5 1
x 2
x1
h(x) = x21 − x2 = 0
x+
= 0
d′d′′
Anal se des contraintes – . 44
Cô i i
8/20/2019 13 Analyse Contraintes
46/61
Cône des directions
• On sait que toute direction admissible à la limite est dans lecône des directions
• L’inverse n’est pas toujours vrai• Or, le cône de directions est plus pratique à manipuler
• Nous nous intéresserons aux cas où le cône des directions estexactement l’ensemble des directions admissibles à la limite.
• On dira dans ce cas que les contraintes sont qualifiées.
Anal se des contraintes – . 45
Q lifi i d i
8/20/2019 13 Analyse Contraintes
47/61
Qualification des contraintes
Qualification des contraintesSoit un problème d’optimisation minx∈Rn f (x) s.c. h(x) = 0, g(x) ≤ 0 et
x ∈ X , et soit un point admissible
x
+.
La condition de qualification des contraintes est vérifiée si tout élément du
cône des directions en x+ est une direction admissible à la limite en x+.
Anal se des contraintes – . 46
Q lifi i d i
8/20/2019 13 Analyse Contraintes
48/61
Qualification des contraintes
• Si les contraintes sont linéaires, alors la qualification descontraintes est vérifiée en tout point admissible.
• Si les contraintes sont linéairement indépendantes en x+
, alorsla qualification des contraintes est vérifiée en x+.
Anal se des contraintes – . 47
Q lifi ti d t i t
8/20/2019 13 Analyse Contraintes
49/61
Qualification des contraintes
• S’il existe un vecteur d ∈ Rn tel que
1. ∇hi(x+)T d = 0, pour tout i = 1, . . . , m,
2. ∇gi(x+
)T
d
8/20/2019 13 Analyse Contraintes
50/61
Qualification des contraintes
• S’il n’y a pas de contrainte d’égalité, que les fonctions gi sont
convexes, et qu’il existe un vecteur x− tel que
gi(x−)
8/20/2019 13 Analyse Contraintes
51/61
Qualification des contraintes
En général, on supposera que la qualification des contraintes estvérifiée
Anal se des contraintes – . 50
Eli i ti d t i t
8/20/2019 13 Analyse Contraintes
52/61
Elimination des contraintes
min f (x1, x2, x3, x4) = x21 + sin(x3 − x2) + x4 + 1
sous contraintes
x1 +x2 +x3 = 1
x1 −x2 +x4 = 1
Nous pouvons réécrire les contraintes :
x3 = 1 − x1 − x2x4 = 1 − x1 + x2
Anal se des contraintes – . 51
Eli i ti d t i t
8/20/2019 13 Analyse Contraintes
53/61
Elimination des contraintes
On obtient un problème en x1 et x2 :
min f (x1, x2) = x21 + sin(−x1 − 2x2 + 1) − x1 + x2 + 2
sans contrainte.
Anal se des contraintes – . 52
Eli i ti d t i t
8/20/2019 13 Analyse Contraintes
54/61
Elimination des contraintes
• Soit les contraintes Ax = b, avec A ∈ Rm×n de rang plein.
• Soient m colonnes linéairement indépendantes de A
correspondant aux variables que l’on désire éliminer.• Appliquons une permutation P ∈ Rn×n des colonnes de A de
telle manière qu’il s’agisse des m premières colonnes.
AP = (B N ) avec B ∈ Rm×m
, N ∈ Rm×
(n−m
)
Anal se des contraintes – . 53
Eli i ti d t i t
8/20/2019 13 Analyse Contraintes
55/61
Elimination des contraintes
• On peut écrire
Ax = AP (P T x) = BxB + N xN = b
Anal se des contraintes – . 54
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
56/61
Elimination des contraintes
Comme B est carrée et non singulière
xB = B−1(b − N xN ).
Donc,
minxB,xN
f (x) = f P xB
xN
sous contraintes (Ax =)BxB + N xN = b,
est équivalent au problème sans contrainte
minxN
f
P
B−1(b − N xN )
xN
.
Anal se des contraintes – . 55
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
57/61
Elimination des contraintes
min f (x1, x2, x3, x4) = x21 + sin(x3 − x2) + x4 + 1
sous contraintes
x1 +x2 +x3 = 1
x1 −x2 +x4 = 1
Eliminons x3 et x4, donc
P =
0 0 1 0
0 0 0 1
1 0 0 0
0 1 0 0
Anal se des contraintes – . 56
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
58/61
Elimination des contraintes
AP = (B|N ) =
1 0 1 1
0 1 1 −1
et xB =
x3x4 = B−1(b − N xN )
=
1 0
0 1
1
1
−
1 1
1 −1
x1
x2
=
1 − x1 − x21 − x1 + x2
Anal se des contraintes – . 57
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
59/61
Elimination des contraintes
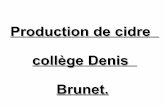
Dans le cas non linéaire, attention !
minx
f (x1, x2) = x21 + x
22 s. c. (x1 − 1)
3 = x22
Solution: (1, 0). Eliminons x22
minx1
f̃ (x1) = x21 + (x1 − 1)
3.
f̃ n’est pas borné inférieurement
Contrainte implicite : x1 − 1 ≥ 0
Anal se des contraintes – . 58
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
60/61
Elimination des contraintes
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
-3
-2
-1
0
1
2
3
-3 -2 -1 0 1 2 3
x 2
x1
(1, 0)
x22 = (x1 − 1)3
Anal se des contraintes – . 59
Elimination des contraintes
8/20/2019 13 Analyse Contraintes
61/61
Elimination des contraintes
-60
-50
-40
-30
-20
-10
0
10
20
-3 -2 -1 0 1 2 3
˜ f ( x 1
)
x1
x21 + (x1 − 1)3