1.1 Présentation de l’entreprise SENSeOR et du...
37
1 INTRODUCTION 1.1 Présentation de l’entreprise SENSeOR et du département de recherche LPMO 1.1.1 L’entreprise SENSeOR [1] : L’entreprise SENSeOR est basée à Sophia Antipolis. Elle est entrée en incubation 1 le 21 décembre 2005. La société SENSeOR conçoit, développe et commercialise des capteurs à ondes acoustiques SAW 2 miniatures, passifs (sans batterie) et interrogeables à distance. SENSeOR vise à conquérir différents marchés tels que l’automobile, les capteurs industriels ou même encore des marchés liés à la sécurité, à l’environnement et au médical. En effet, l’accessibilité au marché automobile est liée à leurs partenaires actuels : les applications sur lesquelles SENSeOR est déjà présent sont donc le TPMS 3 (Tire Pressure Monitoring System) et la mesure de couple de torsion (EPAS – Electronic Power Assisted Steering). De plus, SENSeOR développe actuellement un capteur avec l’encapsulation associée pour la mesure de température et aura également la responsabilité de l’industrialisation du système électronique d’interrogation sur ce projet. Les capteurs SAW vont évoluer vers une 2ème génération pour intégrer un identifiant. La mesure de température est l’application sur laquelle SENSeOR est le mieux positionné en proposant un système complet (électronique + capteur). En outre, SENSeOR permet grâce à ces capteurs de prévoir des risques chez des patients atteints de maladies chroniques. La maîtrise de l’énergie, la diminution de la pollution, la réduction de la consommation des véhicules et l’augmentation de leur sécurité sont autant de nouvelles applications pour de nouveaux types de capteurs (chimiques, température, pression, déformation). Actuellement, un nouveau biocapteur autonome et polyvalent à ondes acoustiques de surface est développé en étroit partenariat par FEMTO-ST 4 . C’est dans ce cadre que je vais travailler avec une équipe du département LPMO 5 . 1.1.2 Le département de recherche LPMO [2] : Le département LPMO fait partie de l'Institut FEMTO-ST qui est une unité mixte du Centre National de la Recherche Scientifique (CNRS). Il dépend du département Sciences et Technologies de l'information et de l'ingénierie (STII) du CNRS. Les autres tutelles sont l'Université de Franche-Comté (UFC), l'Ecole Nationale Supérieure de Mécanique et des Microtechniques (ENSMM) et l'Université de Technologies de Belfort-Montbéliard (UTBM). Les recherches menées dans le département LPMO sont relatives aux axes "Ondes électromagnétiques, optiques et acoustiques" et "Microsystèmes et Microtechnologies". Le département LPMO est le laboratoire d'accueil du Master Sciences Santé Technologies (SST), mention Science de l'Ingénieur et Informatique (SdII), spécialité Electronique et Optique (ELO) dont je suis issu, avec le département LOPMD (Optique) et le département LCEP localisé à l'ENSMM. Les enseignants-chercheurs, les chercheurs CNRS, les ingénieurs et les personnels techniques sont très actifs dans les filières d'enseignement de l'ENSMM et de l'Université de Franche-Comté (licence et master orientés vers la Physique et l'EEA (Electronique Electrotechnique et Automatique). De plus, le département LPMO est l'un des piliers de la filière d'ingénieurs "Instrumentation et Techniques Biomédicales" de l'Institut Supérieur d'Ingénieurs de Franche-Comté de l'UFC (ISIFC). - 1 -
Transcript of 1.1 Présentation de l’entreprise SENSeOR et du...
1 INTRODUCTION 1.1 Présentation de l’entreprise SENSeOR et du
département de recherche LPMO 1.1.1 L’entreprise SENSeOR [1] :
L’entreprise SENSeOR est basée à Sophia Antipolis. Elle est entrée en incubation1 le 21 décembre 2005. La société SENSeOR conçoit, développe et commercialise des capteurs à ondes acoustiques SAW2 miniatures, passifs (sans batterie) et interrogeables à distance.
SENSeOR vise à conquérir différents marchés tels que l’automobile, les capteurs industriels ou même encore des marchés liés à la sécurité, à l’environnement et au médical. En effet, l’accessibilité au marché automobile est liée à leurs partenaires actuels : les applications sur lesquelles SENSeOR est déjà présent sont donc le TPMS3 (Tire Pressure Monitoring System) et la mesure de couple de torsion (EPAS – Electronic Power Assisted Steering). De plus, SENSeOR développe actuellement un capteur avec l’encapsulation associée pour la mesure de température et aura également la responsabilité de l’industrialisation du système électronique d’interrogation sur ce projet. Les capteurs SAW vont évoluer vers une 2ème génération pour intégrer un identifiant. La mesure de température est l’application sur laquelle SENSeOR est le mieux positionné en proposant un système complet (électronique + capteur). En outre, SENSeOR permet grâce à ces capteurs de prévoir des risques chez des patients atteints de maladies chroniques. La maîtrise de l’énergie, la diminution de la pollution, la réduction de la consommation des véhicules et l’augmentation de leur sécurité sont autant de nouvelles applications pour de nouveaux types de capteurs (chimiques, température, pression, déformation).
Actuellement, un nouveau biocapteur autonome et polyvalent à ondes acoustiques de surface est développé en étroit partenariat par FEMTO-ST4. C’est dans ce cadre que je vais travailler avec une équipe du département LPMO5. 1.1.2 Le département de recherche LPMO [2] :
Le département LPMO fait partie de l'Institut FEMTO-ST qui est une unité mixte du Centre National de la Recherche Scientifique (CNRS). Il dépend du département Sciences et Technologies de l'information et de l'ingénierie (STII) du CNRS. Les autres tutelles sont l'Université de Franche-Comté (UFC), l'Ecole Nationale Supérieure de Mécanique et des Microtechniques (ENSMM) et l'Université de Technologies de Belfort-Montbéliard (UTBM).
Les recherches menées dans le département LPMO sont relatives aux axes "Ondes électromagnétiques, optiques et acoustiques" et "Microsystèmes et Microtechnologies". Le département LPMO est le laboratoire d'accueil du Master Sciences Santé Technologies (SST), mention Science de l'Ingénieur et Informatique (SdII), spécialité Electronique et Optique (ELO) dont je suis issu, avec le département LOPMD (Optique) et le département LCEP localisé à l'ENSMM.
Les enseignants-chercheurs, les chercheurs CNRS, les ingénieurs et les personnels techniques sont très actifs dans les filières d'enseignement de l'ENSMM et de l'Université de Franche-Comté (licence et master orientés vers la Physique et l'EEA (Electronique Electrotechnique et Automatique). De plus, le département LPMO est l'un des piliers de la filière d'ingénieurs "Instrumentation et Techniques Biomédicales" de l'Institut Supérieur d'Ingénieurs de Franche-Comté de l'UFC (ISIFC).
- 1 -
Le département LPMO est dirigé par Vincent Laude (directeur), qui est secondé par Rémi Brendel (directeur adjoint).
Les recherches menées dans le département LPMO sont fondées d'une part sur ses compétences dans les domaines de la physique, de l'électronique et des dispositifs et systèmes temps et fréquence, d'autre part sur sa compétence et son savoir-faire en micro-fabrication et en microsystèmes intégrés et assemblés. Quatre équipes de recherche sont soutenues par des services administratifs et techniques communs. Elles travaillent sur les thématiques temps et fréquence et microtechnologies.
Mon équipe est « l’équipe 1 » dirigée par Sylvain Ballandras (chef d’équipe). Une partie de cette équipe travaille en collaboration faite avec la société SENSeOR. Elle développe un nouveau biocapteur à ondes acoustiques de surface. Une telle technologie nécessite une salle blanche6, de solides compétences dans l’usinage du quartz et une bonne expérience dans le domaine des ondes élastiques guidées, triple exigence à laquelle Besançon est l’une des rares villes à répondre.
1.2 Le capteur à ondes acoustiques de surface [3] Annexe 8.1
Dans la pléthore des capteurs développés pour la mesure de grandeurs physiques ou la détection de substances, qu’elles soient chimiques ou biologiques, il en est un dont le principe repose sur la mesure des ondes acoustiques de surface. Le mécanisme théorique est simple : les ondes acoustiques se propageant à la surface d’un solide voient leur vitesse se modifier lorsque la composition de la surface change. Ce principe est gravimétrique : toute matière adsorbée est détectée, avec une précision de l’ordre de quelques centaines de ng par cm2.Ces capteurs présentent deux intérêts majeurs : ils ne nécessitent pas de préparation physique préalable des échantillons, à l’inverse de la fluorescence par exemple, et ils peuvent être interrogés sans fil et sans apport d’énergie sur le capteur. Ces propriétés en font un outil de choix, qui est déjà utilisé dans des applications industrielles telles que la téléphonie mobile ou les écrans tactiles. En revanche, sa fonctionnalisation pour des applications en biologie ou en chimie en est encore au stade de la recherche.
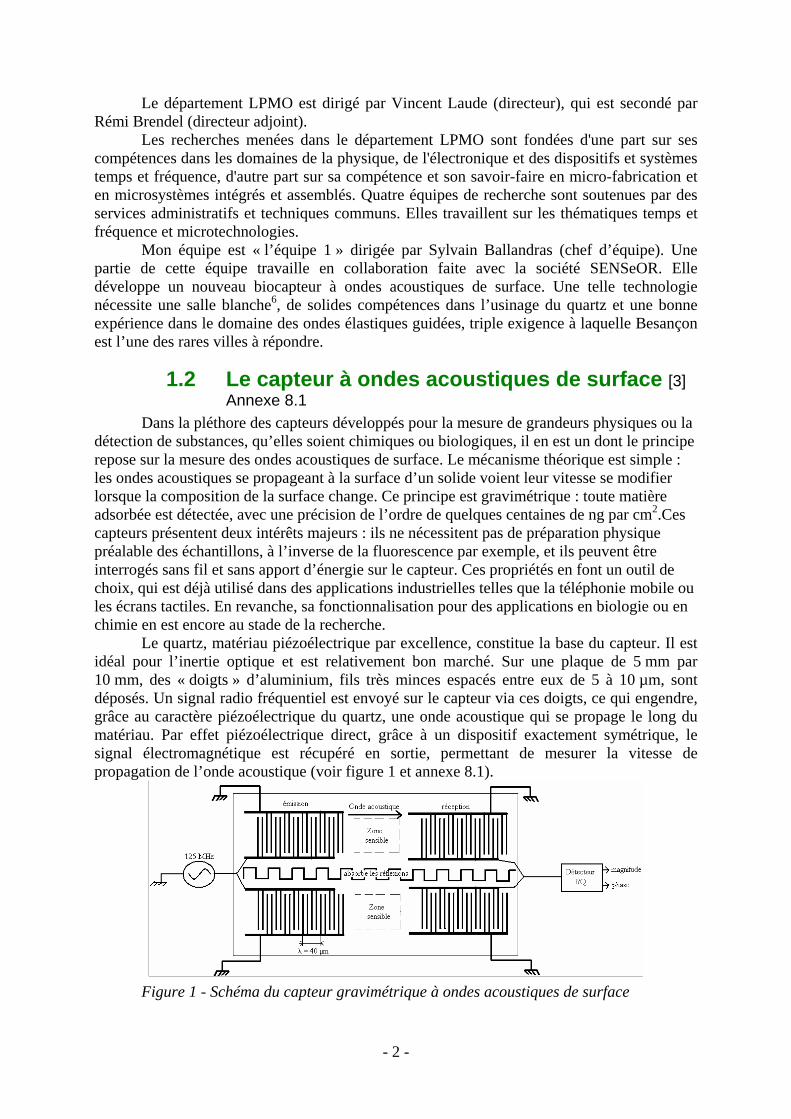
Le quartz, matériau piézoélectrique par excellence, constitue la base du capteur. Il est idéal pour l’inertie optique et est relativement bon marché. Sur une plaque de 5 mm par 10 mm, des « doigts » d’aluminium, fils très minces espacés entre eux de 5 à 10 µm, sont déposés. Un signal radio fréquentiel est envoyé sur le capteur via ces doigts, ce qui engendre, grâce au caractère piézoélectrique du quartz, une onde acoustique qui se propage le long du matériau. Par effet piézoélectrique direct, grâce à un dispositif exactement symétrique, le signal électromagnétique est récupéré en sortie, permettant de mesurer la vitesse de
Figure 1 - Schéma du capteur gravimétrique à ondes aco
propagation de l’onde acoustique (voir figure 1 et annexe 8.1).
ustiques de surface
- 2 -
Ce type de capteur est déjà commercialisé pour mesurer des grandeurs physiques telles que la température, la pression, l’accélération ou des contraintes mécaniques. Mais, avantage supplémentaire, le centre de la plaque de quartz peut être fonctionnalisé pour réagir avec des espèces chimiques ou biochimiques déterminées. Une couche d’anticorps, par exemple, est répandue à la surface du capteur. Si l’antigène correspondant se trouve dans le milieu extérieur, alors il viendra se fixer sur l’anticorps, modifiant les propriétés de la surface. Ceci est susceptible de changer la vitesse de propagation de l’onde acoustique. Tout se passe comme si elle était contrainte par la couche supérieure. Les atomes, qui auparavant se situaient sur une surface en contact avec l’extérieur, seraient « empêchés » par la seconde couche. C’est en tout cas un changement des conditions aux limites qui expliquerait ce phénom
propageant dans la zone sensible sera appelée l’onde de Love10. Ainsi, l’efficacité én acoustique dépend du confinement du champ électrique dans le sub z tte onde guidée à sa célérité qui dépend de l’absorption d’espèces (bio)chimique sur la couche guidante.
ette couche guidante en déposant du SU-8(Voir figure 3).
ène.
1.3 Objectifs : Il existe plusieurs ondes : Les ondes de volume7 peu sensibles aux effets de surface,
l’onde STW8 (Shear transverse wave), l’onde de Rayleigh9… L’onde de Rayleigh, a des faibles pertes acoustiques dans l’air, ne sont pas
compatibles avec la détection d’espèces en milieu liquide car il existe des composantes hors plan qui rayonne.
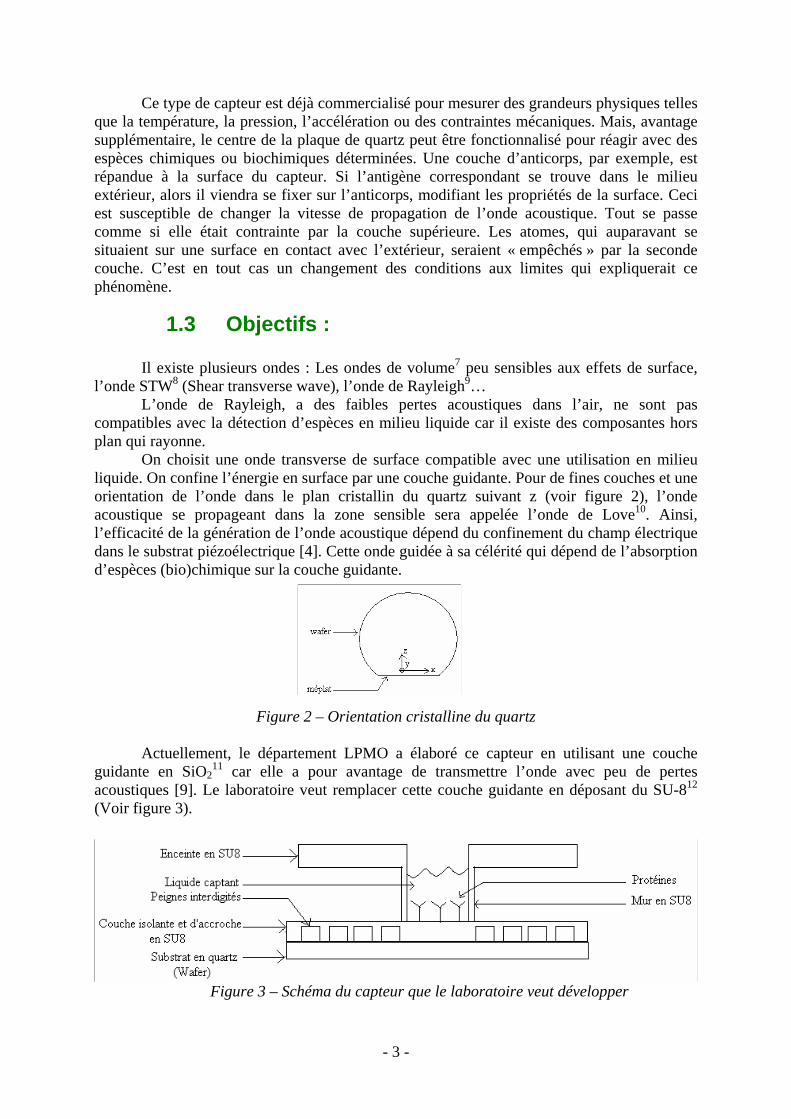
On choisit une onde transverse de surface compatible avec une utilisation en milieu liquide. On confine l’énergie en surface par une couche guidante. Pour de fines couches et une orientation de l’onde dans le plan cristallin du quartz suivant z (voir figure 2), l’onde acoustique se
de la g ération de l’onde strat pié oélectrique [4]. Ce
Figure 2 – Orientation cristalline du quartz Actuellement, le département LPMO a élaboré ce capteur en utilisant une couche
guidante en SiO211 car elle a pour avantage de transmettre l’onde avec peu de pertes
acoustiques [9]. Le laboratoire veut remplacer c 12
Figure 3 – Schéma du capteur que le laboratoire veut développer
- 3 -
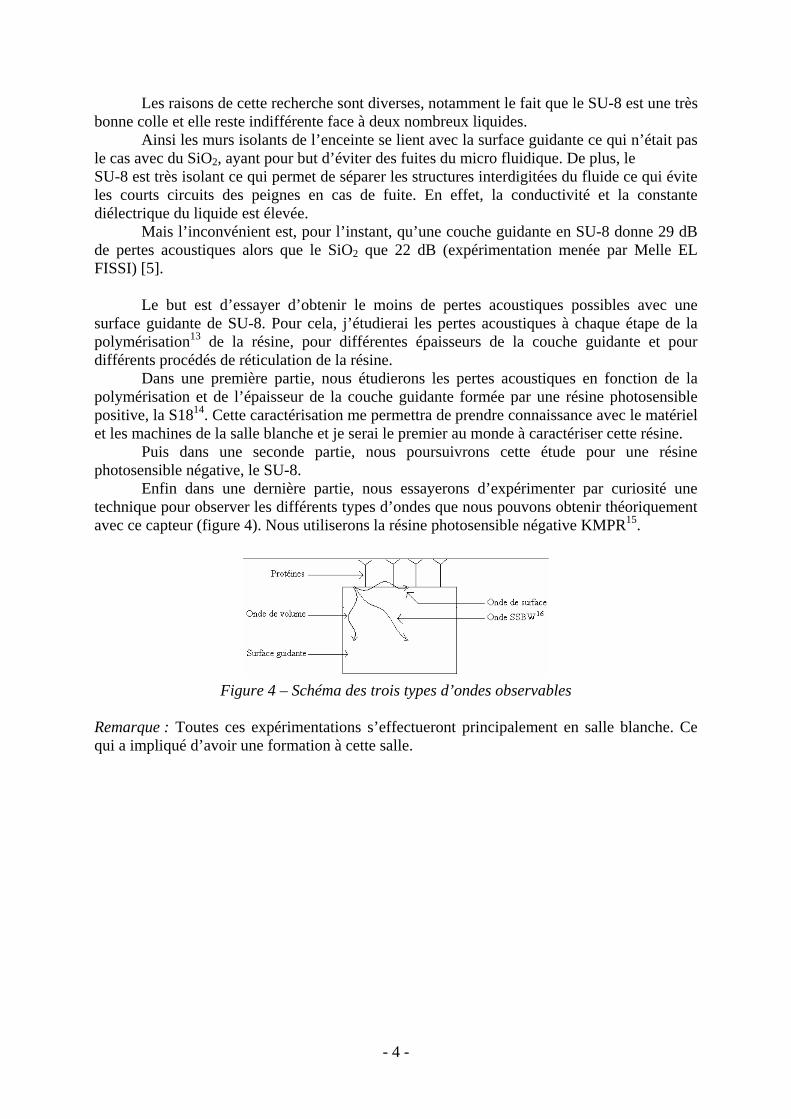
Les raisons de cette recherche sont diverses, notamment le fait que le SU-8 est une très bonne colle et elle reste indifférente face à deux nombreux liquides.
Ainsi les murs isolants de l’enceinte se lien ui n’était pas
Le but es avec une surface
ouche guidante et pour différen
n de la
t je serai le premier au monde à caractériser cette résine.
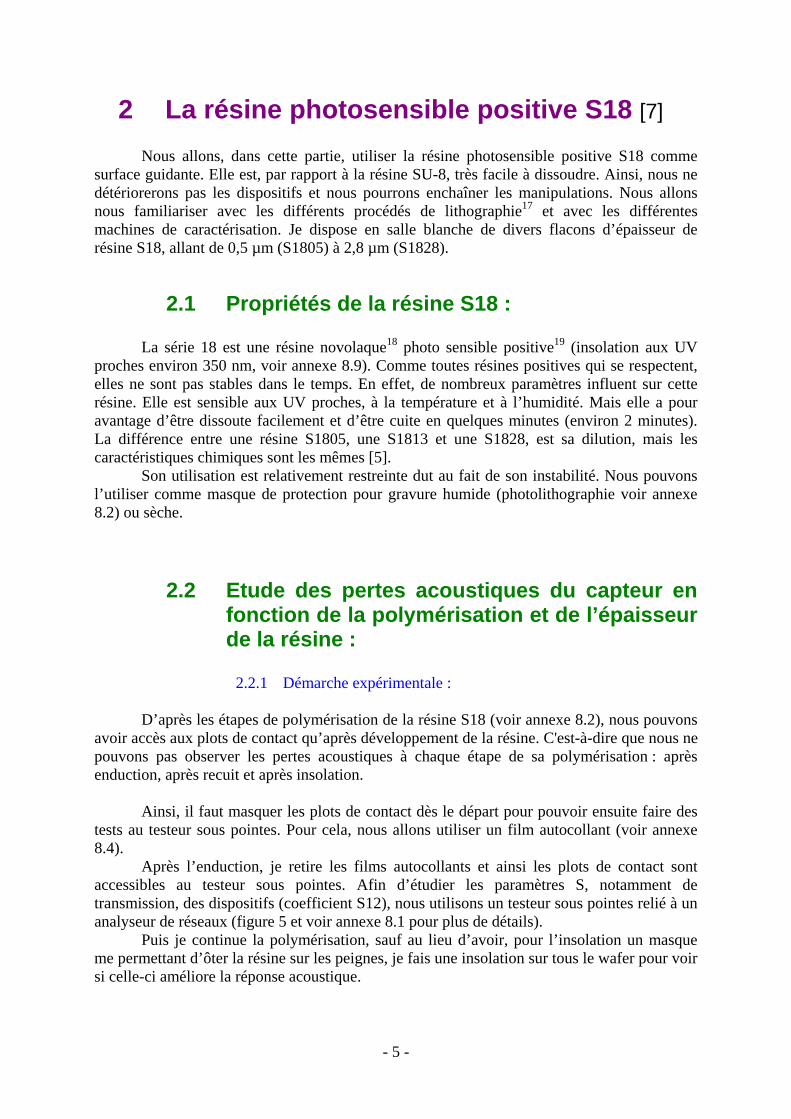
n dans une dernière partie, nous essayerons d’expérimenter par curiosité une observer les différents types d’ondes que nous pouvons obtenir théoriquement
éma des trois types d’ondes observables
t avec la surface guidante ce qle cas avec du SiO2, ayant pour but d’éviter des fuites du micro fluidique. De plus, le SU-8 est très isolant ce qui permet de séparer les structures interdigitées du fluide ce qui évite les courts circuits des peignes en cas de fuite. En effet, la conductivité et la constante diélectrique du liquide est élevée.
Mais l’inconvénient est, pour l’instant, qu’une couche guidante en SU-8 donne 29 dB de pertes acoustiques alors que le SiO2 que 22 dB (expérimentation menée par Melle EL FISSI) [5].
t d’essayer d’obtenir le moins de pertes acoustiques possibles guidante de SU-8. Pour cela, j’étudierai les pertes acoustiques à chaque étape de la
polymérisation13 de la résine, pour différentes épaisseurs de la cts procédés de réticulation de la résine.
Dans une première partie, nous étudierons les pertes acoustiques en fonctiopolymérisation et de l’épaisseur de la couche guidante formée par une résine photosensible positive, la S1814. Cette caractérisation me permettra de prendre connaissance avec le matériel et les machines de la salle blanche e
Puis dans une seconde partie, nous poursuivrons cette étude pour une résine photosensible négative, le SU-8. Enfitechnique pour avec ce capteur (figure 4). Nous utiliserons la résine photosensible négative KMPR15.
Figure 4 – Sch Remarque : Toutes ces expérimentations s’effectueront principalement en salle blanche. Ce qui a impliqué d’avoir une formation à cette salle.
- 4 -
2 La résine photosensible positive S18 [7] Nous allons, dans cette partie, utiliser la résine photosensible positive S18 comme
urface guidante. Elle est, par rapport à la résine SU-8, très facile à dissoudre. Ainsi, nous ne étériorerons pas les dispositifs et nous pourrons enchaîner les manipulations. Nous allons ous familiariser avec les différents procédés de lithographie17 et avec les différentes achines de caractérisation. Je dispose en salle blanche de divers flacons d’épaisseur de sine S18, allant de 0,5 µm (S1805) à 2,8 µm (S1828).
2.1 Propriétés de la résine S18 :
a UV
ide (photolithographie voir annexe .2) ou sèche.
bserver les pertes acoustiques à chaque étape de sa polymérisation : après enduction, après recuit et après insolation.
Ainsi, il faut mtests au tes s8.4).
Après l’enduaccessibles au test fin d’étudier les paramètres S, notamment de
ansmission, des dispositifs (coefficient S12), nous utilisons un testeur sous pointes relié à un tails).
Puis je continue la polymérisation, sauf au lieu d’avoir, pour l’insolation un masque me per
sdnmré
L série 18 est une résine novolaque18 photo sensible positive19 (insolation aux 350 nm, voir annexe 8.9). Comme toutes résines positives qui se respectent, proches environ
elles ne sont pas stables dans le temps. En effet, de nombreux paramètres influent sur cette résine. Elle est sensible aux UV proches, à la température et à l’humidité. Mais elle a pour avantage d’être dissoute facilement et d’être cuite en quelques minutes (environ 2 minutes). La différence entre une résine S1805, une S1813 et une S1828, est sa dilution, mais les caractéristiques chimiques sont les mêmes [5].
Son utilisation est relativement restreinte dut au fait de son instabilité. Nous pouvons ’utiliser comme masque de protection pour gravure huml
8
2.2 Etude des pertes acoustiques du capteur en fonction de la polymérisation et de l’épaisseur de la résine :
2.2.1 Démarche expérimentale :
D’après les étapes de polymérisation de la résine S18 (voir annexe 8.2), nous pouvons avoir accès aux plots de contact qu’après développement de la résine. C'est-à-dire que nous ne pouvons pas o
asquer les plots de contact dès le départ pour pouvoir ensuite faire des teur sou pointes. Pour cela, nous allons utiliser un film autocollant (voir annexe
ction, je retire les films autocollants et ainsi les plots de contact sont eur sous pointes. A
tranalyseur de réseaux (figure 5 et voir annexe 8.1 pour plus de dé
mettant d’ôter la résine sur les peignes, je fais une insolation sur tous le wafer pour voir si celle-ci améliore la réponse acoustique.
- 5 -
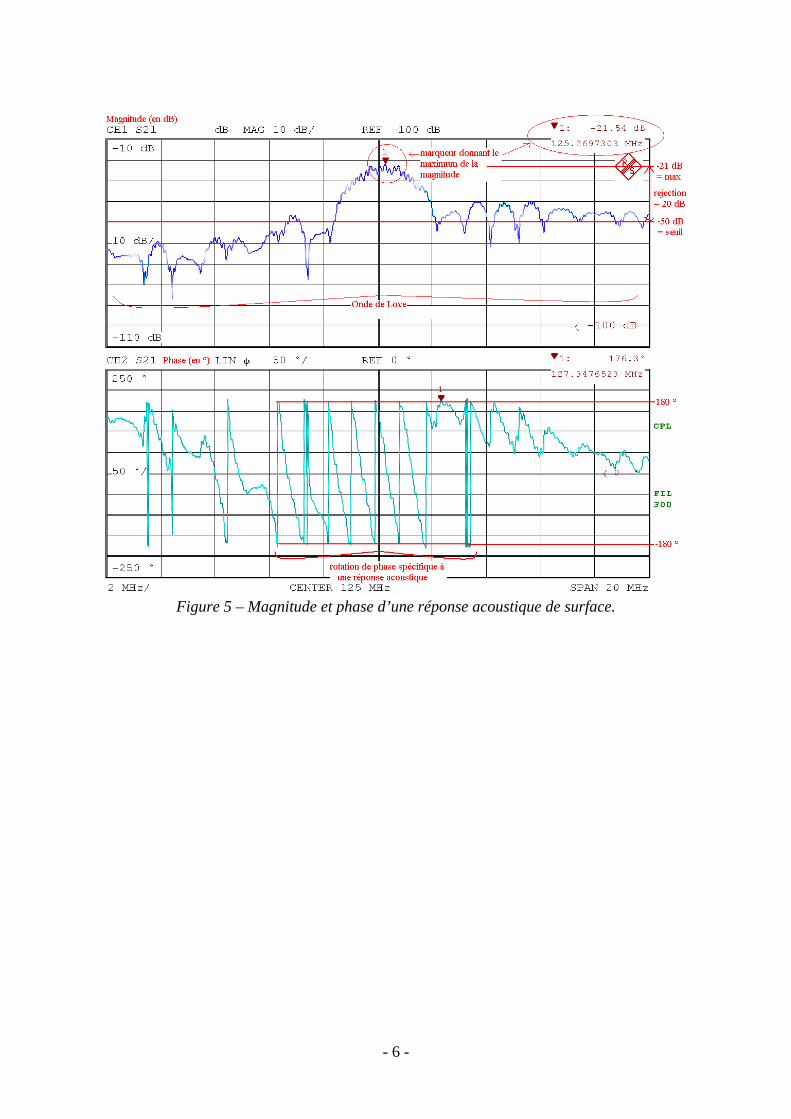
Figure 5 – Magnitude et phase d’une réponse acoustique de surface.
- 6 -
2.2.2 Résultats :
Je dispose des résines S1805, S1813 et S1828, pouvant être déposées respectivement à ne épaisseur de 0,5 µm, 1,3 µm et 2,8 µm. Pour ces trois épaisseurs de résine, nous ossédons les paramètres de la tournette qui sont : temps d’enduction, vitesse et accélération. insi pour obtenir un panel d’épaisseur, j’ai changé la vitesse de rotation de la tournette. En
ffet, plus la tournette tourne rapidement et plus la résine est projetée hors du wafer et versement.
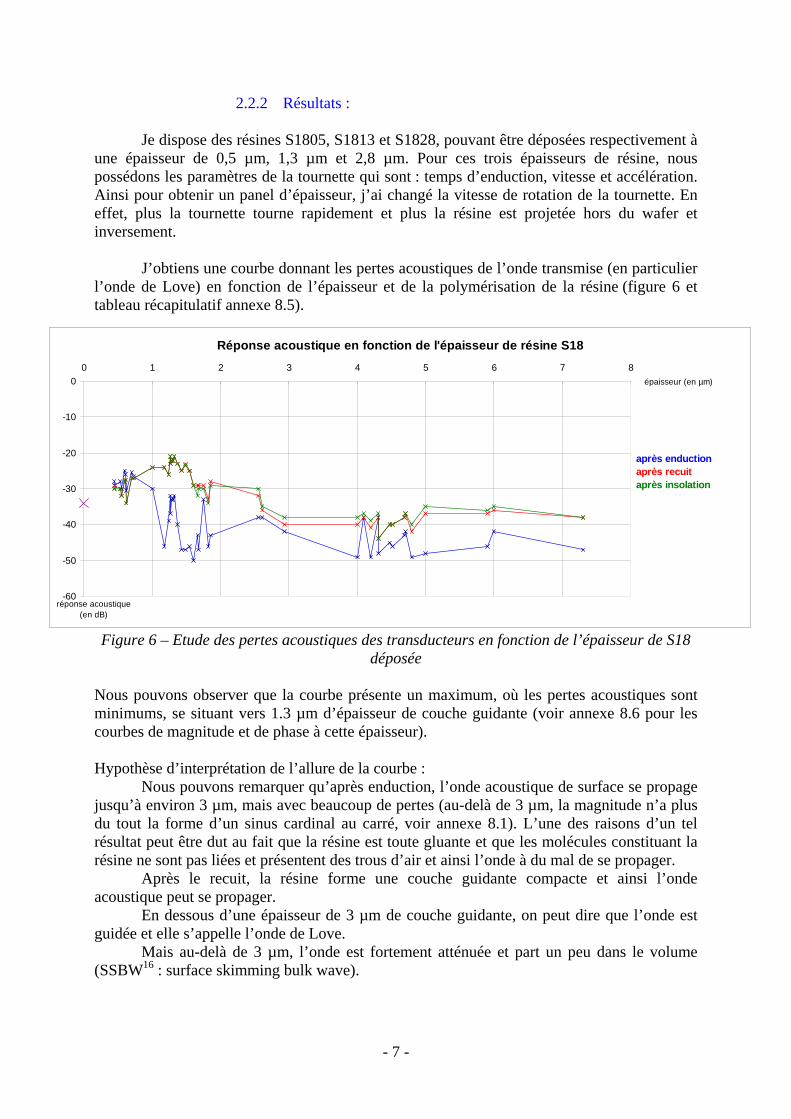
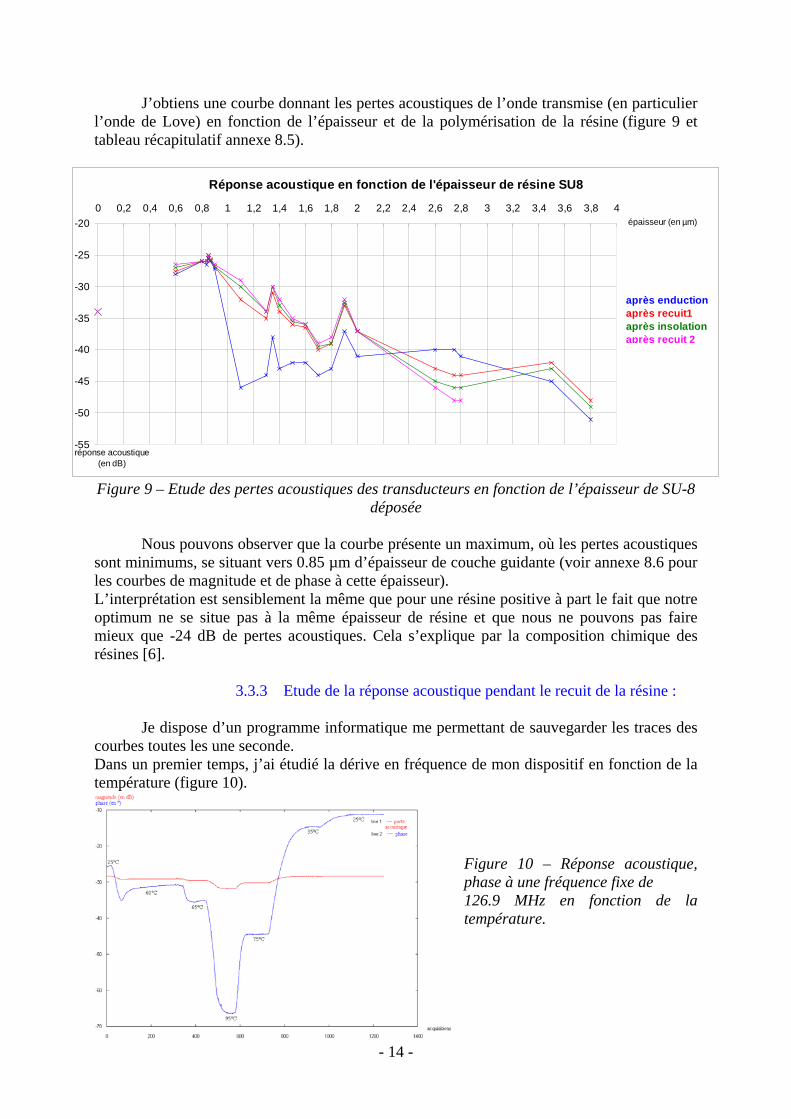
J’obtiens une courbe donnant les pertes acoustiques de l’onde transmise (en particulier onde de Love) en fonction de l’épaisseur et de la polymérisation de la résine (figure 6 et bleau récapitulatif annexe 8.5).
aEn dessous d’une épaisseur de 3 µm de couche guidante, on peut dire que l’onde est
uidée et elle s’appelle l’onde de Love.
upAein l’ta
Réponse acoustique en fonction de l'épaisseur de résine S18
-60
-50
-40
-30
-20
-10
00 5 6 7 8
épaisseur (en µm)
réponse acoustique (en dB)
1 2 3 4
après enductionaprès recuitaprès insolation
Figure 6 – Etude des pertes acoustiques des transducteurs en fonction de l’épaisseur de S18 déposée
Nous pouvons observer que la courbe présente un maximum, où les pertes acoustiques sont minimums, se situant vers 1.3 µm d’épaisseur de couche guidante (voir annexe 8.6 pour les courbes de magnitude et de phase à cette épaisseur). Hypothèse d’interprétation de l’allure de la courbe :
Nous pouvons remarquer qu’après enduction, l’onde acoustique de surface se propage jusqu’à environ 3 µm, mais avec beaucoup de pertes (au-delà de 3 µm, la magnitude n’a plus du tout la forme d’un sinus cardinal au carré, voir annexe 8.1). L’une des raisons d’un tel résultat peut être dut au fait que la résine est toute gluante et que les molécules constituant la résine ne sont pas liées et présentent des trous d’air et ainsi l’onde à du mal de se propager.
Après le recuit, la résine forme une couche guidante compacte et ainsi l’onde coustique peut se propager.
gMais au-delà de 3 µm, l’onde est fortement atténuée et part un peu dans le volume
(SSBW16 : surface skimming bulk wave).
- 7 -
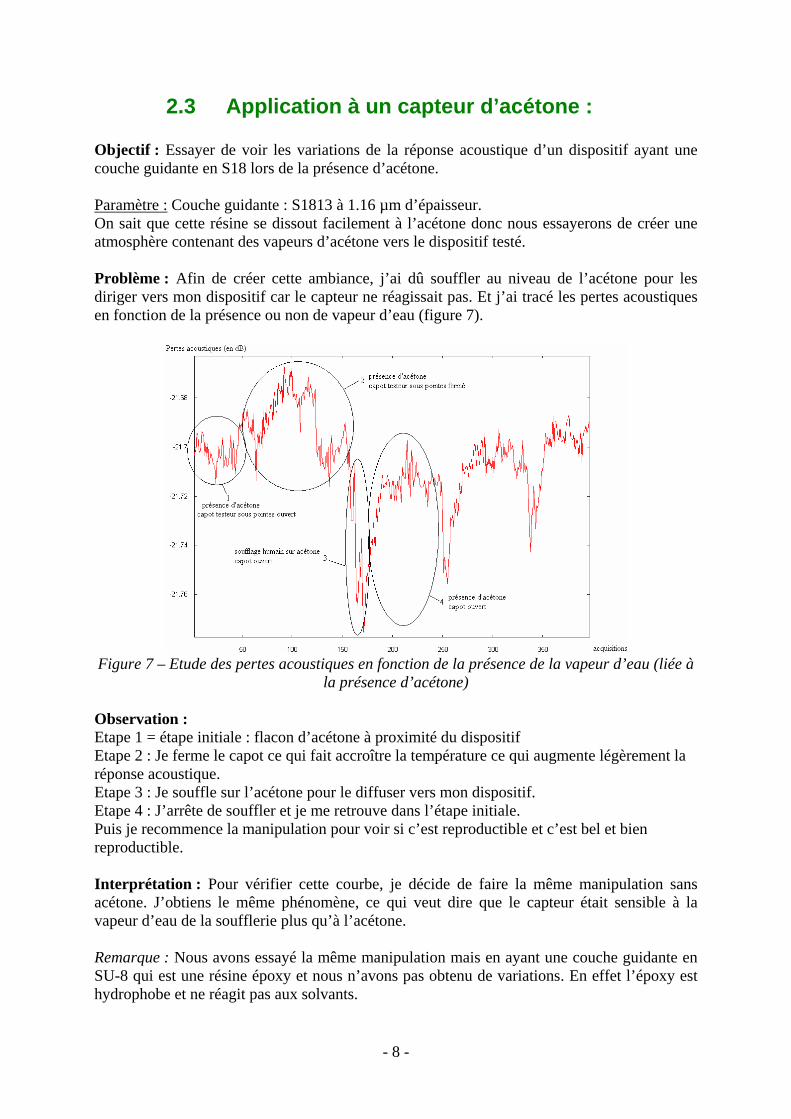
2.3 Application à un capteur d’acétone : Objectif : Essayer de voir les variations de la réponse acoustique d’un dispositif ayant une couche guidante en S18 lors de la présence d’acétone. Paramètre : Couche guidante : S1813 à 1.16 µm d’épaisseur. On sait que cette résine se dissout facilement à l’acétone donc nous essayerons de créer une atmosphère contenant des vapeurs d’acétone vers le dispositif testé. Problème : Afin de créer cette ambiance, j’ai dû souffler au niveau de l’acétone pour les diriger vers mon dispositif car le capteur ne réagissait pas. Et j’ai tracé les pertes acoustiques en fonction de la présence ou non de vapeur d’eau (figure 7).
Figure 7 – E
ObservatEtape 1 = éEtape 2 : J ment la réponse acoustique. Etape 3 : J
reproductible. Interpréta nipulation sans acétone. nsible à la
au de la soufflerie plus qu’à l’acétone. Remarque : Nous avons essayé la même n mais en ayant une couche guidante en
U-8 qui est une résine époxy et nous n’avons pas obtenu de variations. En effet l’époxy est e réagit pas aux solvants.
tude des pertes acoustiques en fonction de la présence de la vapeur d’eau (liée à la présence d’acétone)
ion : tape initiale : flacon d’acétone à proximité du dispositif
e ferme le capot ce qui fait accroître la température ce qui augmente légère
e souffle sur l’acétone pour le diffuser vers mon dispositif. Etape 4 : J’arrête de souffler et je me retrouve dans l’étape initiale. Puis je recommence la manipulation pour voir si c’est reproductible et c’est bel et bien
tion : Pour vérifier cette courbe, je décide de faire la même ma J’obtiens le même phénomène, ce qui veut dire que le capteur était se
vapeur d’e
manipulatioShydrophobe et n
- 8 -
2.4 Conclusion :
Ainsi, nous pouvons conclure que lorsque nous avons une cn à
ouche guidante en S18, celui de réception avec
Love. soit
our des couches plus épaisses, cette onde transverse a tendance à partir dans le 16
l’onde acoustique de surface se propage du transducteur d’émissioplus ou moins de pertes. Lors d’une fine couche, cette onde guidée s’appelle l’onde deNous obtenons un minimum de pertes acoustiques pour une épaisseur de S18 de 1.3 µm21 décibels. P-
volume du substrat et s’appelle une onde SSBW (surface skimming bulk wave). Maintenant que je me suis bien familiarisé avec les différents procédés, je vais déposer
un couche de SU-8 sur les peignes interdigités.
- 9 -
3 La résine photosensible négative SU-8 [6-8]
La résine photosensible SU-8 est une résine négatif utilisée à la base pour la icrofabrication de moules servant à la réalisation de pièces en métal. Des caractérisations
ptiques ont montré que ce photorésist était favorable à des applications nécessitant des tructures épaisses avec un haut facteur de forme20. Ce qui nous intéresse car nous voulons ar la suite faire des murs (figure 2) deux fois plus haut que large.
3.1 Historique :
La résine photosensible SU-8 est une formulation photosensible récente, composée rincipalement de résine époxy. Elle résulte de recherche dans le domaine de l’application des
ères époxy à la micro-électronique. Les résines époxys présentent des propriétés chi résibonne isolation électrique et thermique. Cependant, l’état d’avancement des recherches avant
s années ne permettait l’obtention du polymère solide qu’après un traitement e
s à l’électronique et à la microfabrication. Les formulations photosensibles à base de SU-8 apparaissent à la fin des années 1980 avec le groupe de J. Shaw et J.D. Gelorme et elles ne cessent d’être améliorées pour leurs ati tion. Le développement de la résine photosensible
U-8 va suivre la demande croissante de structuration de couches épaisses à haut facteur de forme
mosp
ppolym
miques, physico-chimiques, mécaniques, et physiques, intéressantes (figure 8) : une bonnestance chimique et mécanique, une excellente adhésion sur la plupart des substrats et une
1960, leth rmique de la résine initialement liquide; traitement thermique trop sévère et long pour le domaine de l’électronique. C’est pourquoi des chercheurs se sont penchés sur une polymérisation amorcée non plus thermiquement, mais photoniquement. Ainsi, la génération des formulations époxy photosensibles allaient voir le jour dans les années 1970. Principalement utilisées comme adhésif, les résines époxys voient leur domaine d’applications s’élargir peu à peu aux vernis ou couches de protection, pui
applic ons à la microfabricaS
par lithographie. Des recherches vont se poursuivre dans ce domaine, pour aboutir à la réalisation de structures dimensionnelles (épaisseur allant jusqu’au millimètre), à flancs verticaux, avec un facteur de forme de l’ordre de 20 pour la lithographie UV et jusqu’à 100 pour la lithographie rayons X. Le photorésist SU-8 prend alors son essor dans le domaine des MEMS18 en tant que matériau bon marché, avec des propriétés de photostructurablilité inégalées (facteur de forme et épaisseur exposable). Les qualités de ce photorésist sont principalement dues à ses propriétés chimiques et physiques.
- 10 -
3.2 Propriétés du SU-8 : 3.2.1 Composition et photopolymérisation :
e photorésist SU-8 (ou formulation photosensible àL base de SU-8) est composé de trois principaux ingrédients, à savoir la résine EPON® SU-8 (ou EPIKOTE® 157) disponible sous forme de granulés et fabriquée par Shell Chemical, le solvant gamma-butyrolactone qui permet de dissoudre la résine et d’ajuster la viscosité des formulations, et enfin le photoamorceur, un sel de triarylsulfonium, pour amorcer la réaction de polymérisation. Selon l’épaisseur des films en SU-8 désirée, des formulations de diverses viscosités sont préparées, pour satisfaire une gamme d’épaisseurs allant de quelques centaines de nanomètre au millimètre. Le SU-8 est une résine époxy comprenant 8 fonctionnalités époxys par molécule; il s’agit d’un prépolymère21. Sa polymérisation est une réaction en chaîne (voir annexe). Sous l’action d’un photon, le photoamorceur subit une photolyse et va donner lieu à la formation d’un acide de Bronsted, catalyseur pour l’amorçage de la réaction de réticulation de type cationique. Celle-ci va se poursuivre jusqu’à épuisement du prépolymère et donner lieu à la formation seau a présence des huit fonctions époxys. Le polymère thermo e excellente résistance chimique et
3.2.2 Propriétés physiques :
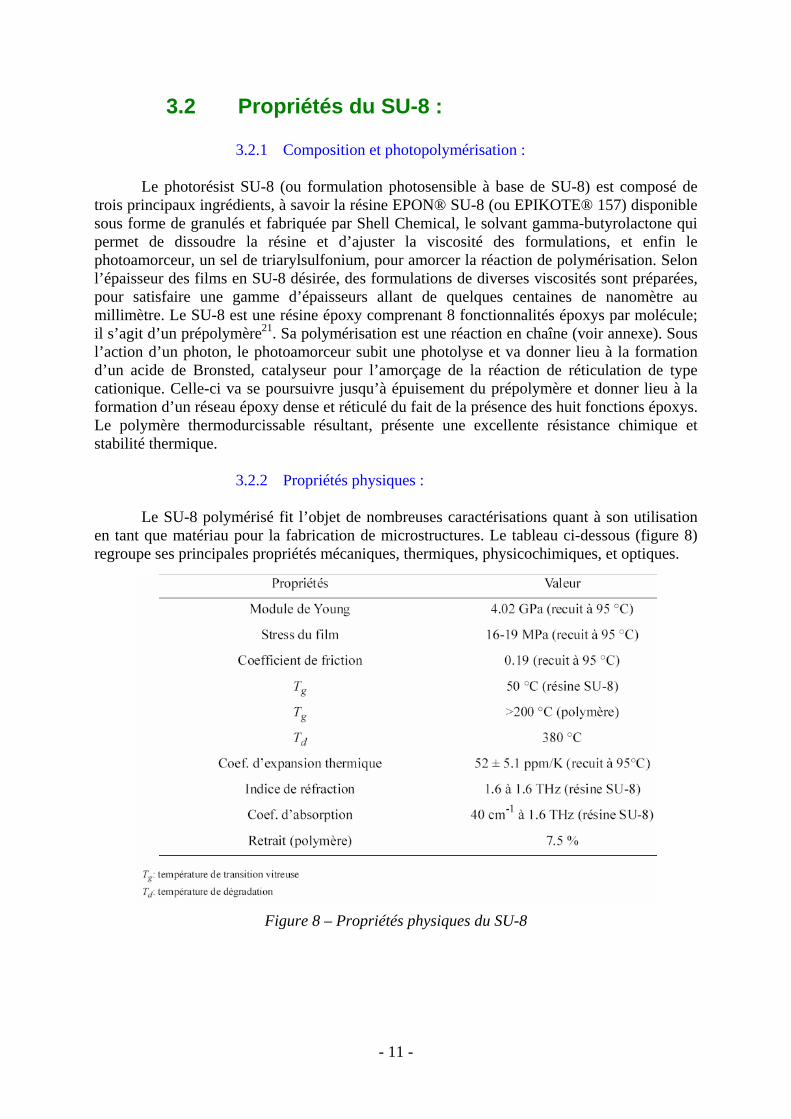
Figure 8 – Propriétés physiques du SU-8
d’un ré époxy dense et réticulé du fait de ldurcissable résultant, présente un
stabilité thermique.
Le SU-8 polymérisé fit l’objet de nombreuses caractérisations quant à son utilisation en tant que matériau pour la fabrication de microstructures. Le tableau ci-dessous (figure 8) regroupe ses principales propriétés mécaniques, thermiques, physicochimiques, et optiques.
- 11 -
3.3.3 Procédé d’utilisation du SU-8 (voir annexe 8.7) :
Les formulations SU-8 photosensibles sont utilisées de la même manière que les résines photosensibles négatives. Les étapes du procédé incluent l’étalement de la résine sur le substrat («spin-coating»), une cuisson pour évaporer le solvant («pre-bake»), une exposition («exposure»), un recuit de polymérisation («post exposure bake»), un développement («development»), et parfois un recuit de densification («hard-bake») selon sa fonctionnalité.
Etalement de la résine : Cette étape consiste à étaler le SU-8 photosensible sur un substrat (wafer), par méthode de «spin-coating». Une certaine quantité de matière est déposée sur le substrat qui va subir une rotation à vitesse contrôlée. Ainsi, la force centrifuge exercée sur la matière fait qu’elle s’étale progressivement. L’épaisseur du film SU-8 photosensible dépend à la fois de la viscosité des formulations et de la vitesse de rotation. Cuisson de la résine : Ce traitement thermique permet l’évaporation du solvant contenu dans la formulation SU-8 photosensible. Cette étape se réalise en chauffant à une température à la fois supérieure à la température de transition vitreuse (Tg) de la résine SU-8 (voir figure 5) afin d’améliorer la diffusion du solvant au travers du prépolymère, et supérieure à la température d’évaporation du solvant (de l’ordre de 80°C pour le gamma-butyrolactone). La température généralement utilisée est de 95°C. Le temps du recuit dépend de l’épaisseur du film de photorésist déposé (voir annexe). Exposition : Afin d’amorc -8 photosensible doit ubir une exposition à la lumière UV. La dose d’irradiation est ajustée en fonction de épaisseur du film. Elle est le produit du temps d’irradiation et de l’intensité de la lumière UV 365 nm). Une surexposition entraîne une meilleure adhésion du film au substrat, mais une
erte de résolution des structures. Aussi un compromis doit-être trouvé.
ecuit de polymérisation :
er la réaction de polymérisation, le film SUsl’(àp
R Ce second traitement thermique améliore la polymérisation du SU-8; il s
valeur critique de 95°C. En prolongeant le temps de recuit, la Tg finale dépassera légèrement
’agit de l’étape de propagation de la polymérisation. Cette dernière induit une densification du réseau (augmentation du degré de réticulation) et également une meilleure adhésion. La Tg du polymère dépendra de ce fait de la température du recuit (fixée en général à 95°C) qui influence directement l’avancement de la polymérisation. Tant que la Tg du polymère est inférieure à 95°C, l’avancement est rapide et la Tg évoluera jusqu’à atteindre la
cette valeur critique pour ensuite se stabiliser. De manière à minimiser le stress du polymère, les chocs thermiques sont évités (utilisation de rampes en température). Développement : Le photorésist insolé est ensuite développé de manière à révéler les structures. Cette phase repose sur la dissolution du SU-8 non polymérisé dans un solvant, tel ue le Propylène Glycol Méthyl Ether Acétate (PGMEA). Afin de diminuer le temps de q
développement, une légère agitation est appliquée. Après nettoyage dans un second bain de PGMEA, les structures subissent un rinçage à l’isopropanol. Le temps de développement doit-être surveillé pour éviter un surdéveloppement qui aboutirait à des problèmes de décollement des structures. Recuit de densification et relaxation : Ce dernier traitement thermique n’est pas obligatoire. Cependant il permet d’améliorer la réticulation du polymère et par conséquent l’adhésion
olymère / substrat. Par ailleurs, si stress et fissures apparaissent après le développement ou après le recuit de polymérisation, le recuit de densification, qui s’effectue à une température p
- 12 -
supérieure à 95°C (typiquement entre 100 et 200°C) de manière à obtenir une mobilité des chaînes de polymères, les diminue voire les supprime par relaxation du réseau densifié. Une attention particulière doit-être apportée lors des traitements thermiques afin d’éviter des chocs thermiques, fatals pour les structures. Remarque : Dans notre cas nous ne ferons ni de développement, ni de recuit de densification,
, nous pouvons ainsi tudier la réponse acoustique de quelques dispositifs, dans les différentes étapes de
mérisation de la résine (ceci vient du fait que le SU-8 est une résine négative). n effet, nous étudierons les pertes acoustiques après enduction, après le premier recuit, après
, vitesse et accélération. Ainsi pour obtenir un panel ’épaisseur, j’ai changé la vitesse de rotation de la tournette.
car cela n’améliore en rien la réponse acoustique.
3.3 Etude des pertes acoustiques du capteur en fonction de la polymérisation et de l’épaisseur de la résine :
Le procédé de polymérisation du SU-8 étant réalisé par étapes
épolymérisation du SU-8, en collant comme pour la résine S18, des morceaux de films autocollants sur les pads afin de les protéger de la résine. 3.3.1 Démarche expérimentale :
La démarche est sensiblement la même que pour la résine S18 sauf qu’il y a plus d’étapes de polyEl’insolation et après le second recuit. L’inconvénient d’une telle résine vient du fait que c’est une très bonne colle et donc elle se strippe très mal.
3.3.2 Résultats :
Je dispose des résines SU-8-2001 et SU-8-2002, ayant respectivement une épaisseur de 1 µm et 2 µm. Pour ces deux épaisseurs de résine, nous possédons les paramètres de la tournette qui sont : temps d’enductiond
- 13 -
tude des pertes acoustiques des transducteurs en fonction de l’épaisseur de SU-8 déposée
Nous pouvons observer que la courbe présente un maximum, où les pertes acoustiques ont minimums, se situant vers 0.85 µm d’épaisseur de couche guidante (voir annexe 8.6 pour s courbes de magnitude et de phase à cette épaisseur). ’interprétation est sensiblement la même que pour une résine positive à part le fait que notre ptimum ne se situe pas à la même épaisseur de résine et que nous ne pouvons pas faire ieux
3.3.3 Etude de la réponse acoustique pendant le recuit de la résine : Je dispose d’un programme informatique me permettant de sauvegarder les traces des courbes toutes les une seconde. Dans un premier temps, j’ai étudié la dérive en fréquence de mon dispositif en fonction de la température (figure 10).
Figure 10 – Réponse acoustique, phase à une fréquence fixe de 126.9 MHz en fonction de la température.
J’obtiens une courbe donnant les pertes acoustiques de l’onde transmise (en particulier l’onde de Love) en fonction de l’épaisseur et de la polymérisation de la résine (figure 9 et tableau récapitulatif annexe 8.5).
Réponse acoustique en fonction de l'épaisseur de résine SU8
-55
-50
-45
-40
-35
-30
-25
-200 0,2 0,4 0,6 0,8 1 2,2 2,4 2,6 2,8 3 3,2 3,4 3,6 3,8 4
épaisseur (en µm)
répo e acoustique n dB)
1,2 1,4 1,6 1,8 2
Figure 9 – E
sleLom que -24 dB de pertes acoustiques. Cela s’explique par la composition chimique des résines [6].
ns(e
après enductionaprès recuit1après insolationaprès recuit 2
- 14 -
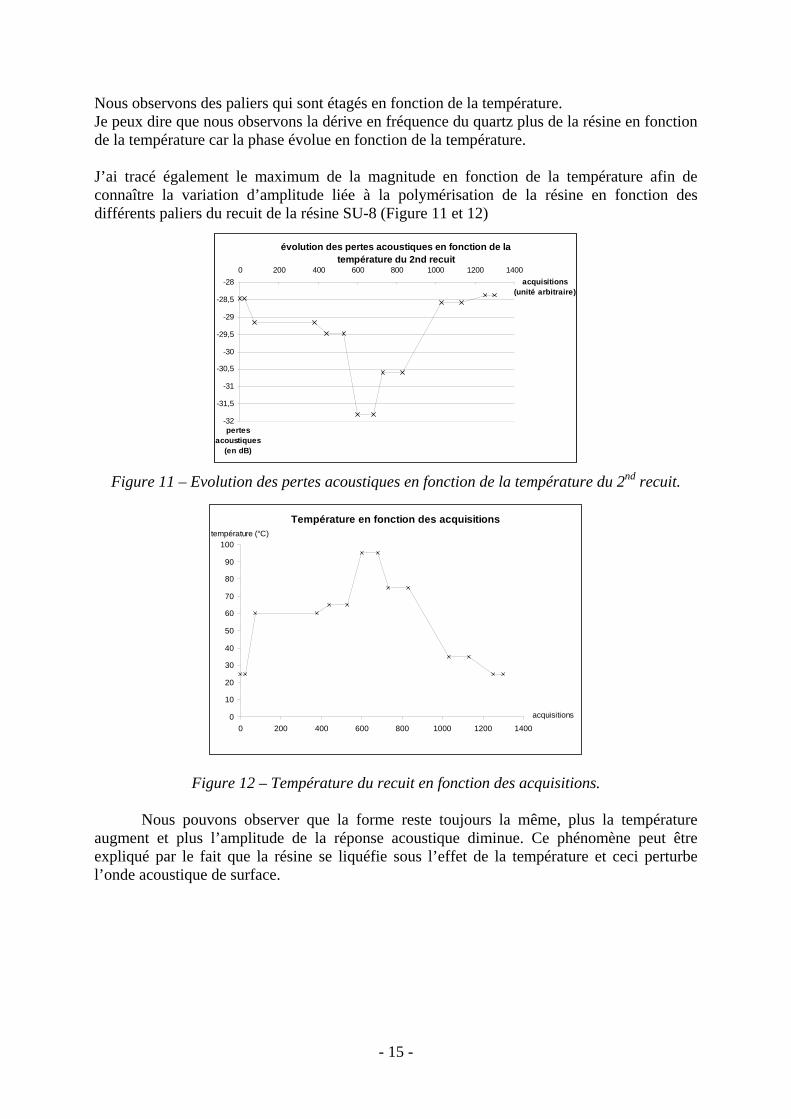
Nous observons des paliers qui sont étagés en fonction de la température. Je peux dire que nous observons la dérive en fréquence du quartz plus de la résine en fonction de la température car la phase évolue en fonction de la température. J’ai tracé également le maximum de la magnitude en fonction de la température afin de connaître la variation d’amplitude liée à la polymérisation de la résine en fonction des différents paliers du recuit de la résine SU-8 (Figure 11 et 12)
Figu nd
en fonction des acquisitions.
jaugment et plus l’amplitude de la réponse acoustique expliqué par le fait que la résine se liquéfie sous l’effel’onde acoustique de surface.
re 11 – Evolution des pertes acoustiques en fonction de la température du 2 recuit.
Figure 12 – Température du recuit Nous pouvons observer que la forme reste tou ours la même, plus la température
diminue. Ce phénomène peut être t de la température et ceci perturbe
Température en fonction des acquisitionstempérature (°C)
00
acquisitions
10
20
30
40
50
60
70
200 400 600 800 1000 1200 1400
80
90
100
évolution des pertes acoustiques en fonction de la température du 2nd recuit
-31,5
-31
-30,5
-30
-29,5
-29
-28,5
-280 200 400 600 800 1000 1200 1400
acquisitions(unité arbitraire)
(en dB)
-32pertes
acoustiques
- 15 -
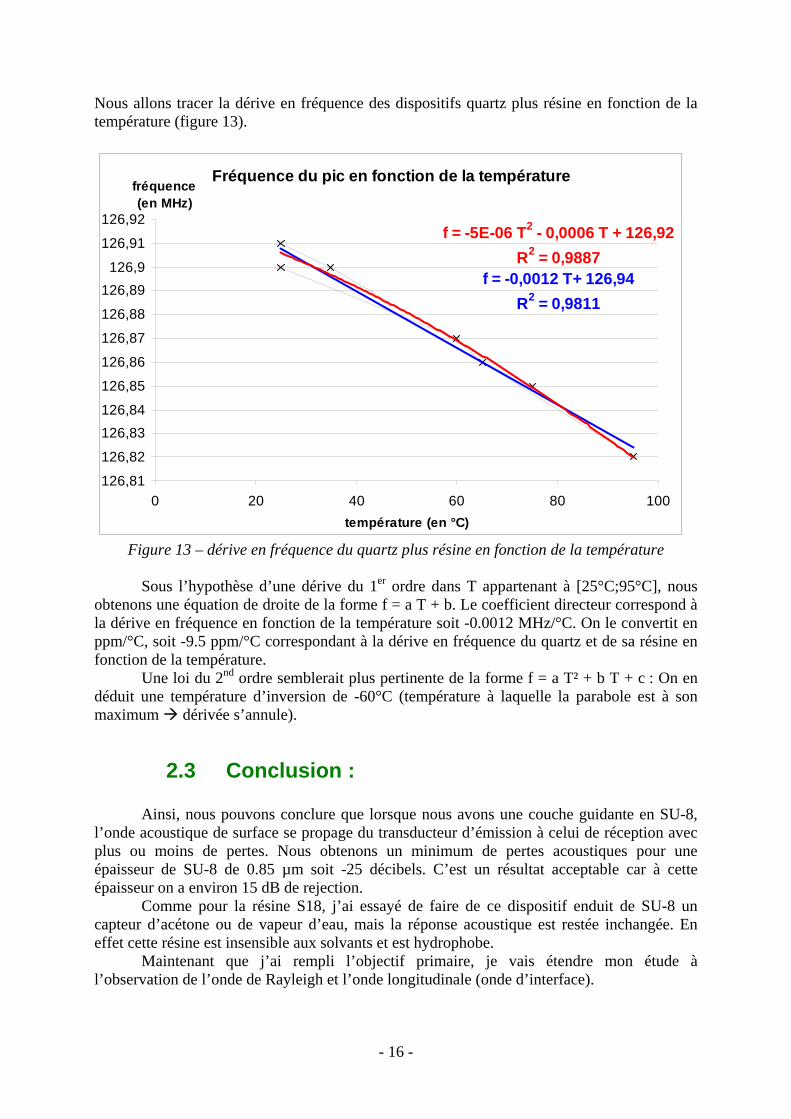
Nous allons tracer la dérive en fréquence des dispositifs quartz plus résine en fonction de la température (figure 13).
Fréquence du pic en fonction de la températurefréquence (en MHz)
f = -5E-06 T2 - 0,0006 TR2 = 0,9887
f = -0,0012 T+R2 = 0,9811
+ 126,92
126,94
126,81
1
126,83126,84
126,85
126,86
126,87
126,88
126,89126,9
126,91
126,92
0 100
26,82
20 40 60 80température (en °C)
Figure 13 – dérive en fréquence du quartz plus résine en fonction de la température
Sous l’hypothèse d’une dérive du 1er ordre dans T appartenant à [25°C;95°C], nous btenons une équation de droite de la forme f = a T + b. Le coefficient directeur correspond à dérive en fréquence en fonction de la température soit -0.0012 MHz/°C. On le convertit en pm/°C, soit -9.5 ppm/°C correspondant à la dérive en fréquence du quartz et de sa résine en nction de la température.
Une loi du 2nd ordre semblerait plus pertinente de la forme f = a T² + b T + c : On en éduit une température d’inversion de -60°C (température à laquelle la parabole est à son aximum dérivée s’annule).
2.3
m soit -25 décibels. C’est un résultat acceptable car à cette paisseur on a environ 15 dB de rejection.
Comme pour la résine S18, j’ai essayé de faire de ce dispositif enduit de SU-8 un apteur d’acétone ou de vapeur d’eau, mais la réponse acoustique est restée inchangée. En ffet cette résine est insensible aux solvants et est hydrophobe.
Maintenant que j’ai rempli l’objectif primaire, je vais étendre mon étude à observation de l’onde de Rayleigh et l’onde longitudinale (onde d’interface).
olapfo dm
Conclusion :
Ainsi, nous pouvons conclure que lorsque nous avons une couche guidante en SU-8, l’onde acoustique de surface se propage du transducteur d’émission à celui de réception avec plus ou moins de pertes. Nous obtenons un minimum de pertes acoustiques pour une paisseur de SU-8 de 0.85 µé
é
ce
l’
- 16 -
4 La résine photosensible négative KMPR [9]
Pour observer l’onde de Rayleigh et l’onde d’interface, il faut changer l’orientation de
l’onde, c'est-à-dire nous devons faire une rotation de 90° des dispositifs afin que l’onde ne se propage plus dans la même direction du plan cristallin du quartz ( l faut qu’elle se propage suivant x et non plus z). Ceci a été montré par des expériences que j’ai faites et par simulations. Nous avons utilisé la KMPR plutôt que le SU-8 car n en laboratoire de la KMPR 1050 (soit 50 µm) et qu’elle est stripable plus facilement et surtout plus rapidement.
4.1 Propriétés de la résine KMPR : La KMPR 1000 est comme le SU-8, une résine photosensible négative. Elle fait également partie de la famille des époxys. On peut déposer de 4 à 120 µm (je dispose également des procédures pour en déposer jusqu’à 300 µm). Les étapes de polymérisation de la KMPR sont les mêmes que pour le SU-8, seules les temps et paliers de température du recuit change ainsi que l’énergie de l’insolation qui sera plus élevée car nous allons déposer 200 µm de KMPR.
4.2 Etude des différentes ondes observables par simulations et expérimentations :
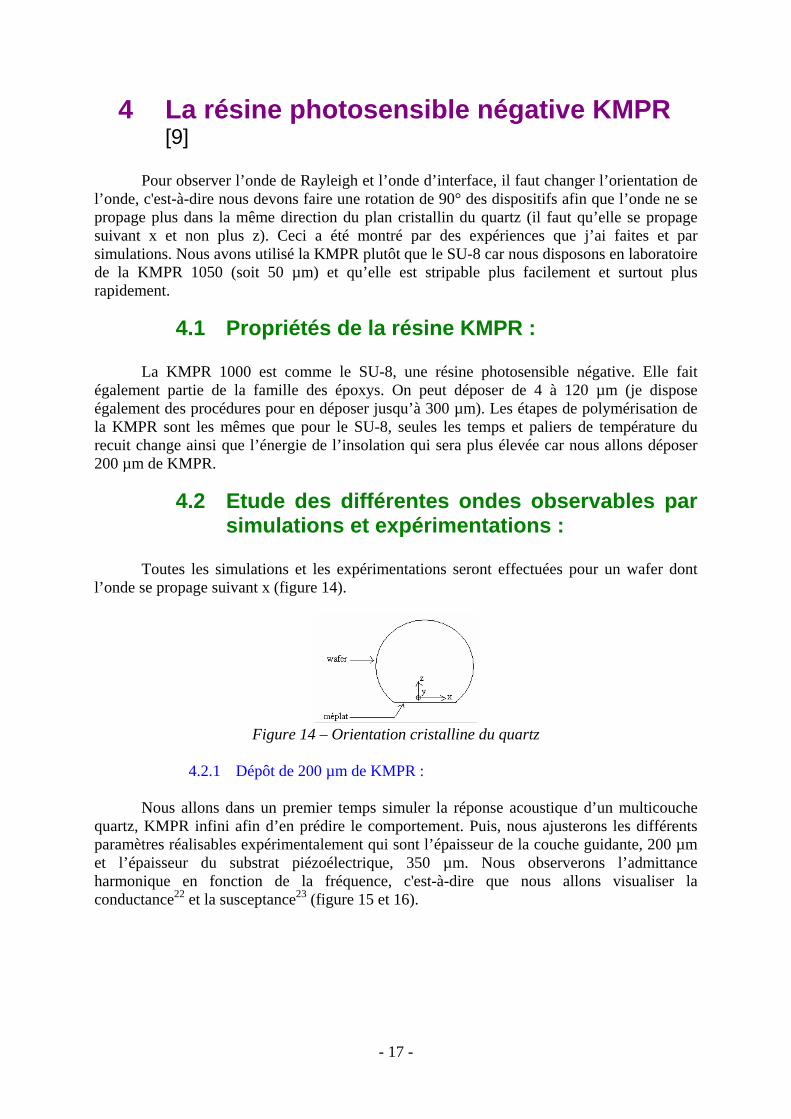
Toutes les simulations et les expérimentations seront effectuées pour un wafer dont
Figure 14 – Orientation cristalline du quartz
1 KMPR :
i
ous disposons
l’onde se propage suivant x (figure 14).
4.2. Dépôt de 200 µm de
Nous allons dans un premier temps simuler la réponse acoustique d’un multicouche quartz, KMPR infini afin d’en prédire le comportement. Puis, nous ajusterons les différents paramètres réalisables expérimentalement qui sont l’épaisseur de la couche guidante, 200 µm et l’épaisseur du substrat piézoélectrique, 350 µm. Nous observerons l’admittance harmonique en fonction de la fréquence, c'est-à-dire que nous allons visualiser la conduc 22 23tance et la susceptance (figure 15 et 16).
- 17 -
– Simulation de la conductance Figure 16 – SimulaFigure 15
t susce
p ravan avec l rientation de l’onde suivant z n’existait pas. Pour
également rebonds après chaqu u substrat (appelée
ou b
a polymérisation de la KMPR. Ainsi, j’ai procédé omme our le SU-8 et la S18, e avec un film autocollant (les
résultats intermédiaires de la polym la résine sont donnés en annexe). Je vais m’intéresser au cas correspondant rès réticulation complète de la résine (figure 17 et 18).
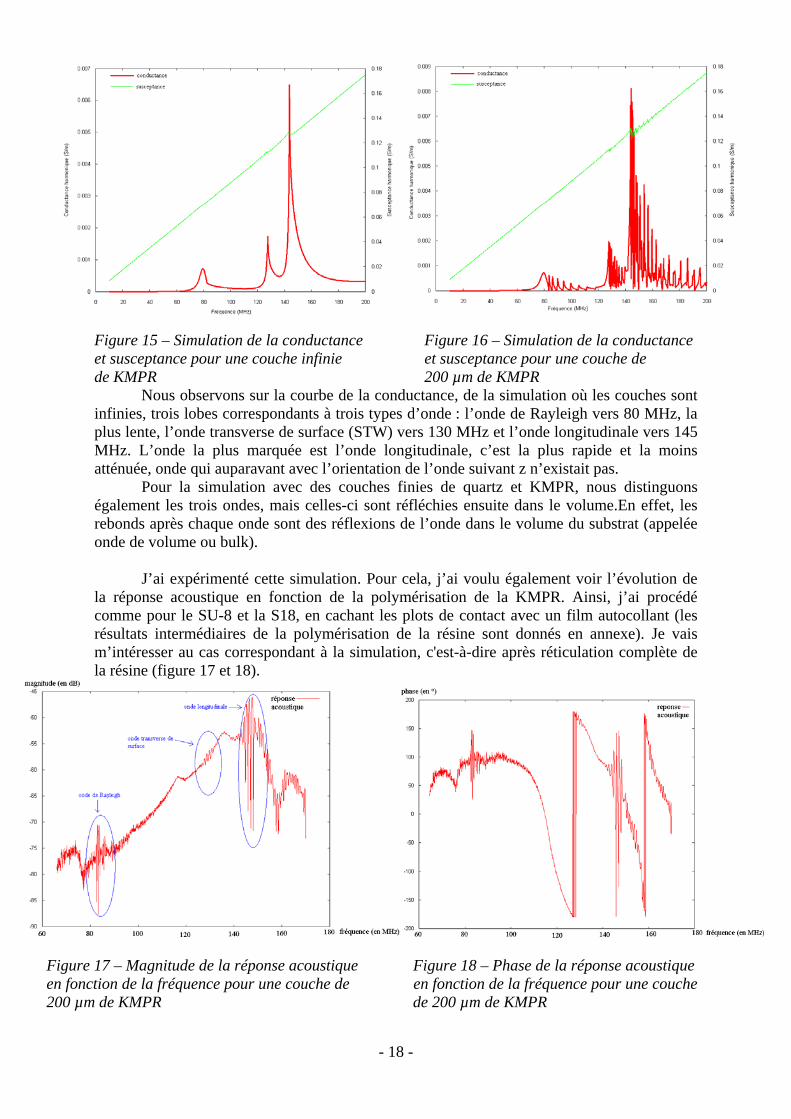
Figure 17 – Magnitude de la réponse acoustique Figure 18 – Phase de la réponse acoustique en fonction de la fréquence pour une couche de en fonction de la fréquence pour une couche 200 µm de KMPR de 200 µm de KMPR
tion de la conductance e ptance pour une couche infinie et susceptance pour une couche de de KMPR 200 µm de KMPR
Nous observons sur la courbe de la conductance, de la simulation où les couches sont infinies, trois lobes correspondants à trois types d’onde : l’onde de Rayleigh vers 80 MHz, la plus lente, l’onde transverse de surface (STW) vers 130 MHz et l’onde longitudinale vers 145 MHz. L’onde la plus marquée est l’onde longitudinale, c’est la plus rapide et la moins atténuée, onde qui au a t ’o
la simulation avec des couches finies de quartz et KMPR, nous distinguons les trois ondes, mais celles-ci sont réfléchies ensuite dans le volume.En effet, les
e onde sont des réflexions de l’onde dans le volume dulk). onde de volume
J’ai expérimenté cette simulation. Pour cela, j’ai voulu également voir l’évolution de a réponse acoustique en fonction de ll
c p n cachant les plots de contact érisation de
à la simulation, c'est-à-dire ap
- 18 -
Nous observons bien les trois types d’onde de Rayleigh vers 83 MHz, l’onde transverse vers 145 MHz. Pour voir ces ondes de façon zoomLes rotations de phase pour l’onde de Rayleigh Remarque : J’ai mesuré la réponse acoustique après mon seuil se situe vers -50 dB. Après le premrecuit, mais je n’observe pas d’évolution quarecuit, nous pouvons comme observé précédemmSTW et l’onde longitudinale.
4.2.2 Dépôt de 3 µm
s ù la con, 'est-à-dire l’épaisseur de résine déposée soit
s encore orienté l’onde suivant
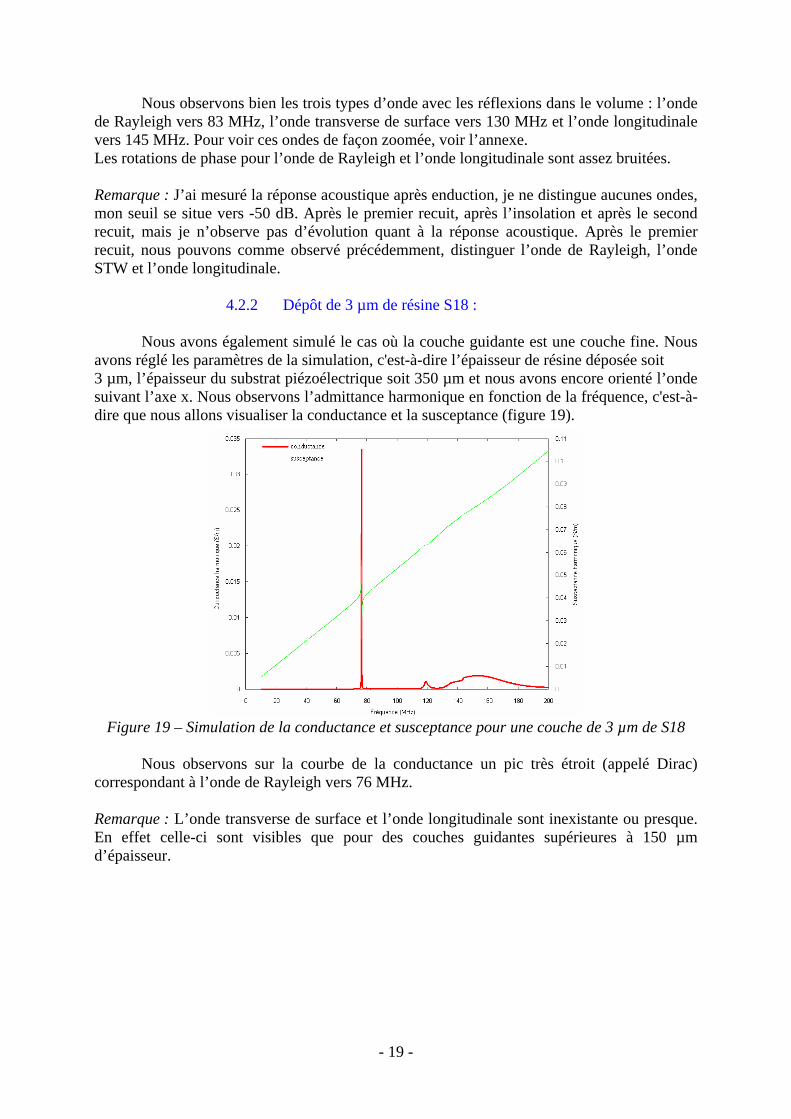
Figure 19 – Simulation de la conductance et susceptance pour une couche de 3 µm de S18 Nous observons sur la courbe de la conductance un pic très étroit (appelé Dirac)
correspondant à l’onde de Rayleigh vers 76 MHz. Remarque : L’onde transverse de surface et l’onde longitudinale sont inexistante ou presque. En effet celle-ci sont visibles que pour des couches guidantes supérieures à 150 µm d’épaisseur.
avec les réflexions dans le volume : l’onde de surface vers 130 MHz et l’onde longitudinale
ée, voir l’annexe. et l’onde longitudinale sont assez bruitées.
enduction, je ne distingue aucunes ondes, ier recuit, après l’insolation et après le second nt à la réponse acoustique. Après le premier
ent, distinguer l’onde de Rayleigh, l’onde
de résine S18 :
Nous avons également simulé le ca o ouche guidante est une couche fine. Nous avons réglé les paramètres de la simulati c3 µm, l’épaisseur du substrat piézoélectrique soit 350 µm et nous avon
l’axe x. Nous observons l’admittance harmonique en fonction de la fréquence, c'est-à-dire que nous allons visualiser la conductance et la susceptance (figure 19).
- 19 -
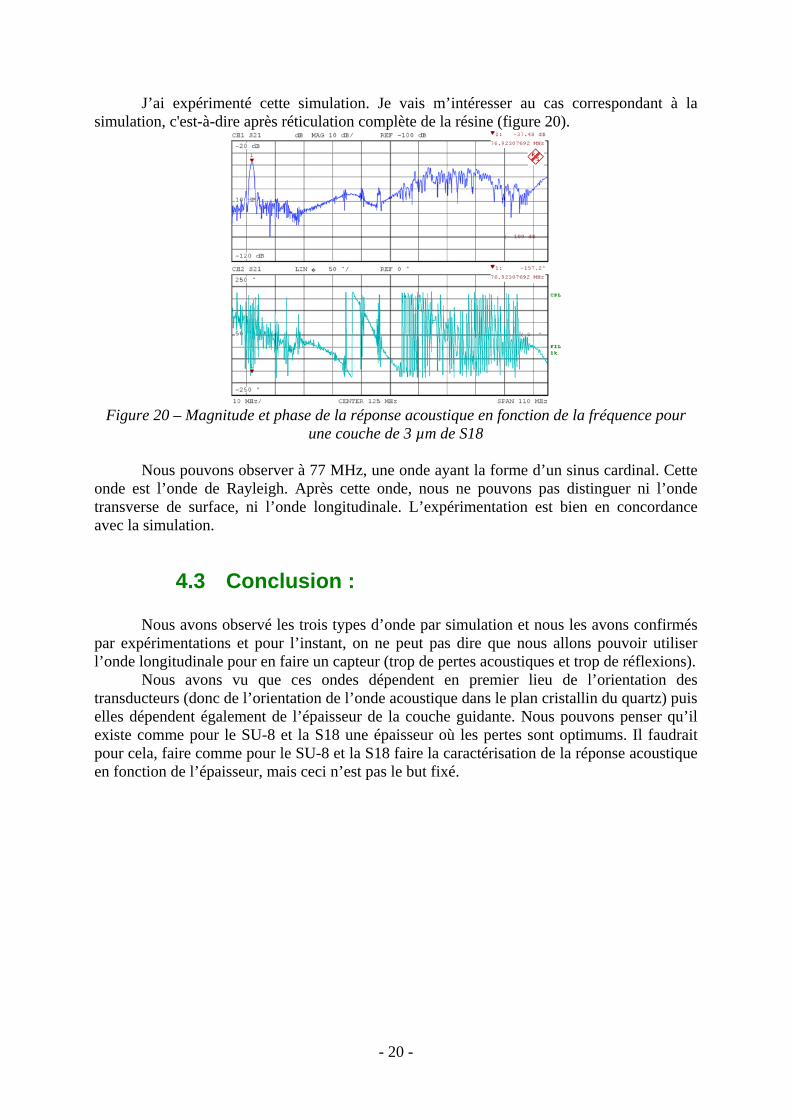
J’ai expérimenté cette simulation. Je vais m’intéresser au cas correspondant à la simulation, c'est-à-dire après réticulation complète de la résine (figure 20).
fréquence pour une couche de 3 µm de S18
Nous pouvons observer à 77 MHz, une onde ayant la forme d’un sinus cardinal. Cette
nde est l’onde de Rayleigh. Après cette onde, nous ne pouvons pas distinguer ni l’onde ansverse de surface, ni l’onde longitudinale. L’expérimentation est bien en concordance vec la simulation.
4.3 Conclusion :
Nous avons observé les trois types d’onde par simulation et nous les avons confirmés ar expérimentations et pour l’instant, on ne peut pas dire que nous allons pouvoir utiliser onde longitudinale pour en faire un capteur (trop de pertes acoustiques et trop de réflexions).
Nous avons vu que ces ondes dépendent en premier lieu de l’orientation des ansducteurs (donc de l’orientation de l’onde acoustique dans le plan cristallin du quartz) puis l t également de l’épaisseur de la couche guidante. Nous pouvons penser qu’il
ex pour ce , faire se acoustique en fonc
Figure 20 – Magnitude et phase de la réponse acoustique en fonction de la
otra
pl’ tre les dépenden
iste comme pour le SU-8 et la S18 une épaisseur où les pertes sont optimums. Il faudrait comme pour le SU-8 et la S18 faire la caractérisation de la réponla
tion de l’épaisseur, mais ceci n’est pas le but fixé.
- 20 -
5 Cette partie reprend les principaux résultats relatifs à chacune des études, et fait le
point sur les recherches futures possibles, qui permettraient de finaliser certaines études ou de trouver des applications qui pourraient bénéficier de telles résines photosensibles.
5.1 Réaliser une couche guidante composite :
Nous avons vu lorsque la couche guidante en S18 faisait 1.3 µm d’épaisseur, nous obtenions 21 dB de pertes acoustiques, ce qui est favorable pour faire un capteur. Mais l’inconvénient de cette résine est qu’elle n’est pas stable (réagit aux UV, à l’eau…). Par contre, avec une couche de SU-8, nous obtenions pour 0.8 µm, 24 dB de pertes, ce qui est légèreme ais elle a pour particularité d’être une très bonne colle et stable dans le temps.
Ainsi je propose de faire une couche composite en S18 et en SU-8. Je déposerais d’abord la couche de S18 à 1.3 µm puis une fine couche de SU-8 pour protéger la S18.
se nommant l’onde longitudinale. Cette onde pourrait être étudiée pour n capteur comme pour l’onde de Love. Contrairement à cette dernière,
itudinale (ou d’interface) sera insensible à tout effet gravimétrique et simplifiera l’encapsulation. Son application pourra servir de capteur de température ou de contrainte.
oustiques ?
5.4 Etudier la variation de la réponse acoustique en présence de substances réagissant avec la couche guidante :
Afin de réaliser une application de capteur de solvant, nous avons effectué une anipulation avec une couche guidante en S18 avec présence d’acétone. L’expérience a été
erturbée par la vapeur d’eau envoyée sur le dispositif mais pas par l’acétone. Il faudrait créer ne enceinte saturée en acétone dans lequel on déposerait notre capteur.
Résumé et perspectives
nt moins bon que la S18, m
5.2 Développer l’étude de l’onde longitudinale : Nous avons vu que lorsque la propagation se fait suivant l’axe x, nous observions une onde vers 145 MHzssayer d’en faire ue
l’onde long
5.3 Etudier la réponse acoustique pour différentes longueurs d’onde :
Toutes les manipulations ont été faites pour une longueur d’onde de 40 µm, soit une
fréquence centrale de l’onde de Love à 125 MHz. Nous pouvons envisager d’établir la relation de dispersion avec des longueurs d’onde différentes (voir annexe 8.1) pour voir sur quels paramètres hors mis la fréquence, va jouer ce changement. Peut être jouera-t-elle un rôle sur les pertes ac
mpu
- 21 -
6 Expérience personnelle e ce pour le parcours recherche
icrosystème, que j’envisage de suivre l’année prochaine, avec les réalités de la profession. sur
echnologie. L’utilisation des md’une réell in du
épartement LPMO et m’a permis de répondre à l’objectif proposé.
ordés au sein de leur laboratoire, me permettant ainsi de découvrir les mondes fantastiques de la microtechn Je qui
’ont apporté aide, réconfort, et tout particulièrement Lamia El Fissi, doctorant, travaillant galem
C stage m’a permis de confronter mon attiranm J’ai remarqué, à la suite de diverses expérimentations, qu’il ne fallait pas être fixéun objectif précis mais être « ouvert » aux résultats donnés par les expériences. Mon initiation à la salle blanche m’ont permis de découvrir les monde fantastiques de la microt
achines en salle blanche se fait par réservation, ainsi j’ai fait preuve e organisation et d’un travail en équipe. Ceci a facilité mon intégration au se
d
7 Remerciements Ce stage a été supervisé par le directeur de recherche Sylvain Ballandras et les ingénieurs Jean-michel Friedt salarié de SENSeOR et Laurent Robert spécialiste en photolithographie. Je tiens à les remercier pour leur accueil et confiance qu’ils m’ont acc
ologie. remercie également l’ensemble de l’équipe dirigée par Sylvain Ballandras,
mé ent pour SENSeOR. Je tiens également à remercier tous les membres du Centre de technologie MIMENTO, pour leur aide quant à l’utilisation des équipements de la salle blanche, leurs connaissances et leur convivialité ont largement contribué à la réalisation de ce travail.
- 22 -
8 Annexe 8.1 Le capteur SAW [10] :
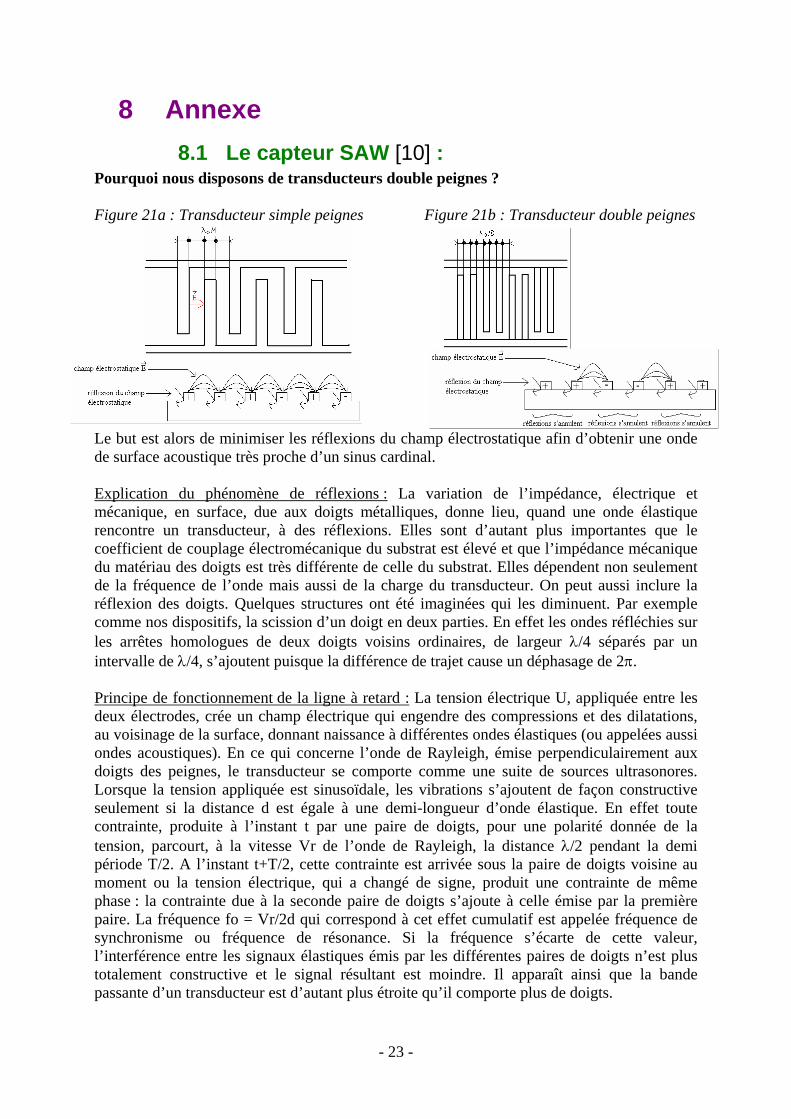
Pourquoi nous disposons de transducteurs double peignes ? Figure 21a : Transducteur simple peignes Figure 21b : Transducteur double peignes
du chame surface acoustique très proche d’un sinus cardinal.
Le but est alors de minimiser les réflexions p électrostatique afin d’obtenir une onde d Explication du phénomène de réflexions : La variation de l’impédance, électrique et mécanique, en surface, due aux doigts métalliques, donne lieu, quand une onde élastique rencontre un transducteur, à des réflexions. Elles sont d’autant plus importantes que le coefficient de couplage électromécanique du substrat est élevé et que l’impédance mécanique du ériau des doigts est très différente de celle du substrat. Elles dépendent non seulement de la fréquence de l’onde mais aussi de la charge du transducteur. On peut aussi inclure la réflexion des doigts. Quelqu
mat
es structures ont été imaginées qui les diminuent. Par exemple
rincipe de fonctionnement de la ligne à retard :
comme nos dispositifs, la scission d’un doigt en deux parties. En effet les ondes réfléchies sur les arrêtes homologues de deux doigts voisins ordinaires, de largeur λ/4 séparés par un intervalle de λ/4, s’ajoutent puisque la différence de trajet cause un déphasage de 2π. P La tension électrique U, appliquée entre les
eux électrodes, crée un champ électrique qui engendre des compressions et des dilatations, u voisinage de la surface, donnant naissance à différentes ondes élastiques (ou appelées aussi
ues). En ce qui concerne l’onde de Rayleigh, émise perpendiculairement aux oigts des peignes, le transducteur se comporte comme une suite de sources ultrasonores. orsque la tension appliquée est sinusoïdale, les vibrations s’ajoutent de façon constructive eulement si la distance d est égale à une demi-longueur d’onde élastique. En effet toute ontrainte, produite à l’instant t par une paire de doigts, pour une polarité donnée de la nsion, parcourt, à la vitesse Vr de l’onde de Rayleigh, la distance λ/2 pendant la demi ériode T/2. A l’instant t+T/2, cette contrainte est arrivée sous la paire de doigts voisine au oment ou la tension électrique, qui a changé de signe, produit une contrainte de même
hase : la contrainte due à la seconde paire de doigts s’ajoute à celle émise par la première aire. La fréquence fo = Vr/2d qui correspond à cet effet cumulatif est appelée fréquence de ynchronisme ou fréquence de résonance. Si la fréquence s’écarte de cette valeur, interférence entre les signaux élastiques émis par les différentes paires de doigts n’est plus talement constructive et le signal résultant est moindre. Il apparaît ainsi que la bande
assante d’un transducteur est d’autant plus étroite qu’il comporte plus de doigts.
daondes acoustiqdLsctepmppsl’top
- 23 -
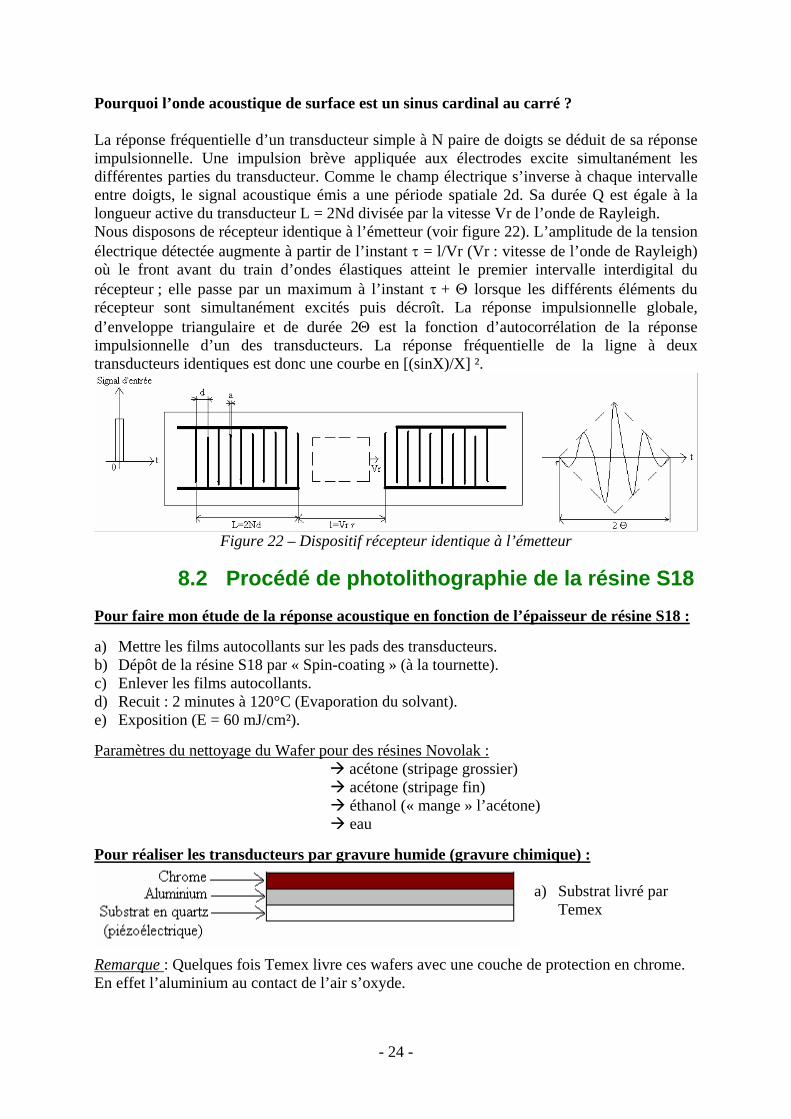
Pourquoi l’onde acoustique de surface est un sinus cardinal au carré ? La réponse fréquentielle d’un transducteur simple à N paire de doigts se déduit de sa réponse impulsionnelle. Une impulsion brève appliquée aux électrodes excite simultanément les différentes lectrique s’inverse à chaque intervalle entre doigt patiale 2d. Sa durée Q est égale à la
r de l’onde de Rayleigh. us disposons de récepteur identique à l’émetteur (voir figure 22). L’amplitude de la tension
électrique détectée augmente à partir de l’instant ) où le front avant du train d’ondes élas ques récepteur ; elle passe par un maximum à l’instant τ + Θ lorsque les différents éléments du
cepteur sont simultanément excités puis décroît. La réponse impulsionnelle globale, ’enveloppe triangulaire et de durée 2Θ est la fonction d’autocorrélation de la réponse
pulsionnelle d’un des transducteurs. La réponse fréquentielle de la ligne à deux ansducteurs identiques est donc une courbe en [(sinX)/X] ².
parties du transducteur. Comme le champ és, le signal acoustique émis a une période s
longueur active du transducteur L = 2Nd divisée par la vitesse VNo
τ = l/Vr (Vr : vitesse de l’onde de Rayleighti atteint le premier intervalle interdigital du
rédimtr
Figure 22 – Dispositif récepteur identique à l’émetteur
8.2 Procédé de photolithographie de la résine S18 Pour faire mon étude de la réponse acoustique en fonction de l’épaisseur de résine S18 : a) Mettre les films autocollants sur les pads des transducteurs. b) Dépôt de la résine S18 par « Spin-coating » (à la tournette). c) Enlever les films autocollants. d) Recuit : 2 minutes à 120°C (Evaporation du solvant). e) Exposition (E = 60 mJ/cm²). Paramètres du nettoyage du Wafer pour des résines Novolak :
acétone (stripage grossier) acétone (stripage fin) éthanol (« mange » l’acétone) eau Pour réaliser les transducteurs par gravure humide (gravure chimique) :
a) Substrat livré par
Temex
Remarque : Quelques fois Temex livre ces wafers avec une couche de protection en chrome. En effet l’aluminium au contact de l’air s’oxyde.
- 24 -
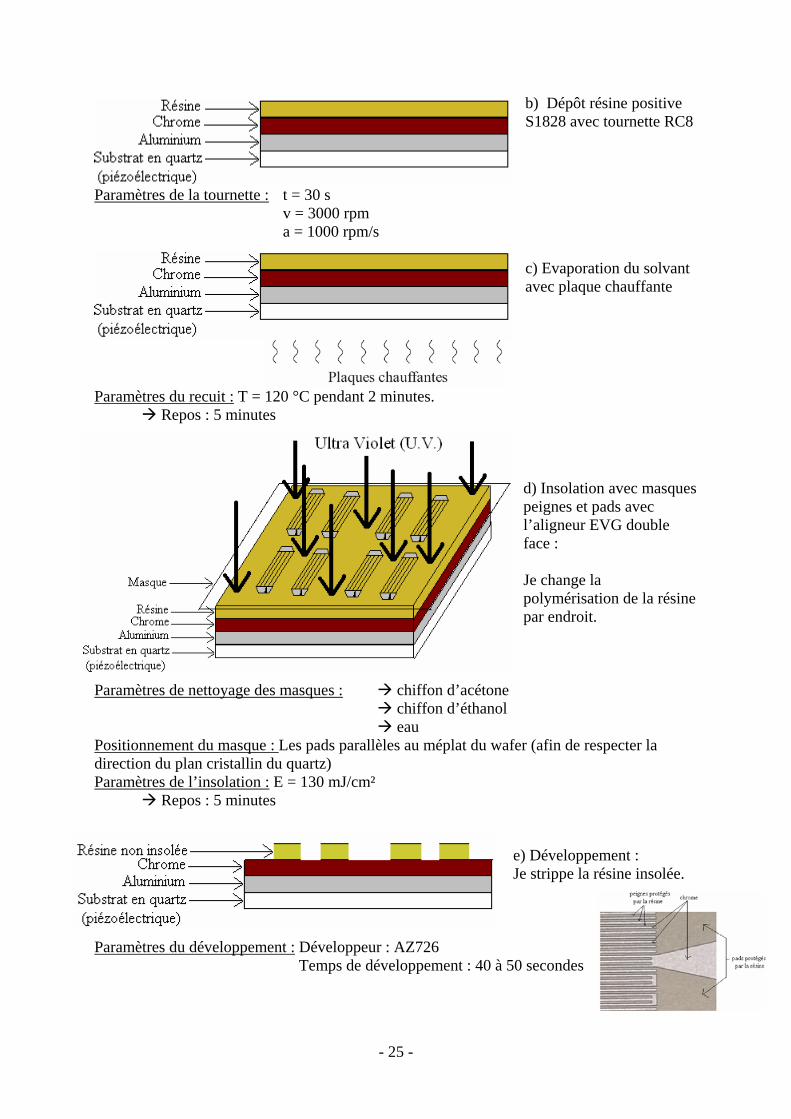
b) Dépôt résine positive S1828 avec tournette RC8
Paramètres de la tournette : t = 30 s v = 3000 rpm a = 1000 rpm/s
c) Evaporation du solvant avec plaque chauffante
Paramètres du recuit : T = 120 °C pendant 2 minutes. Repos : 5 minutes
d) Insolation avec masques peignes et pads avec l’aligneur EVG double face : Je change la polymérisation de la résine
it.
par endro
Paramètres de nettoyage des masques : chiffon d’acétone chiffon d’éthanol eau Positionnement du masque : Les pads parallèles au méplat du wafer (afin de respecter la direction du plan cristallin du quartz) Paramètres de l’insolation : E = 130 mJ/cm² Repos : 5 minutes
e) Développement :
ppe la résine insolée.
Je stri
Paramètres du développement : Développeur : AZ726 Temps de développement : 40 à 50 s
econdes
- 25 -
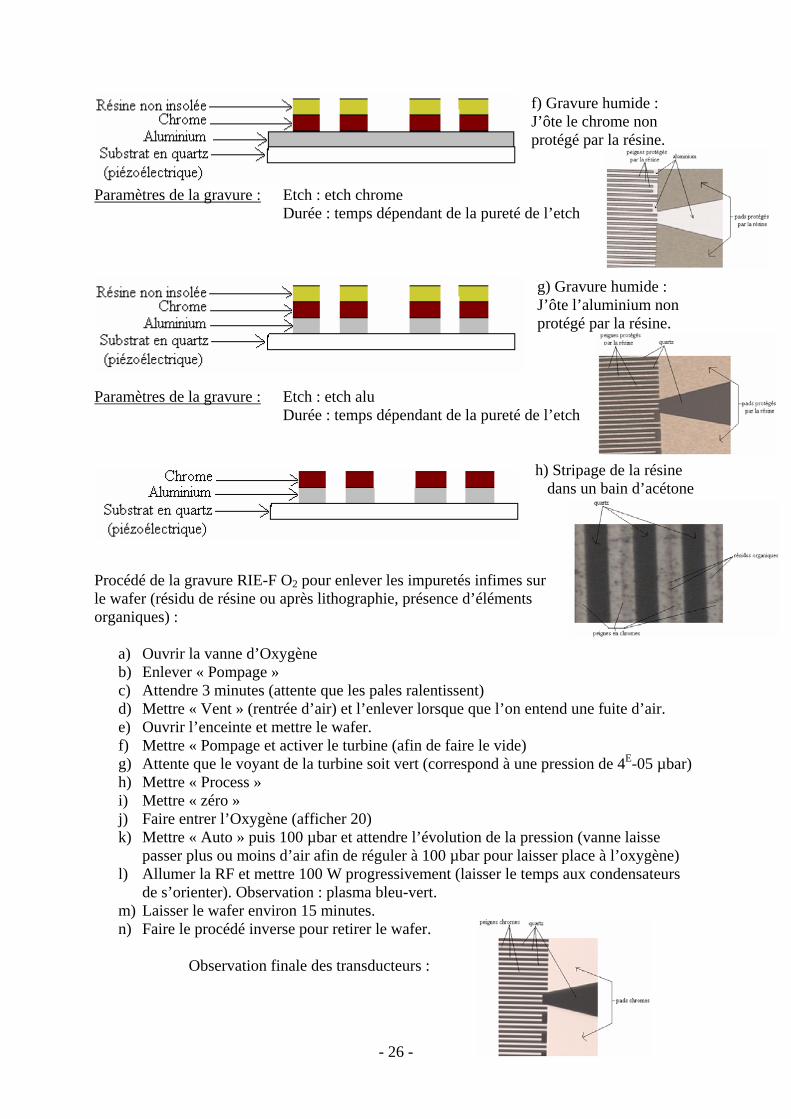
f) Gravure humide : J’ôte le chrome non protégé par la résine.
Paramètres de la gravure : Etch : etch chrome Durée : temps dépendant de la pureté
g) Gravure humide : J’ôte l’aluminium non protégé par la résine.
Paramètres de la gravure :
de l’etch
Etch : etch alu
Durée : temps dépendant de la pureté de l’etch
h) Stripage de la résine dans un bain d’acétone
Procédé de la gravure RIE-F O2 pour enlever les impuretés infimes sur le wafer (résidu de résine ou après lithographie, présence d’élémenorganiques) :
a)b)c) que les pales ralentissent) d) ver lorsque que l’one) Ouvrir l’enceinte et mettre le wafer. f) Mettre « Pompage et activer le turbine (afin de faire le videg) Attente que le voyant de la turbine soit vert (correspond à une pression de 4E-05 µbar) h) Mettre « Process »
volution de la pression (vanne laisse e)
progressivement (laisser le temps aux condensateurs leu-vert.
m) n 15 minutes. n) Faire le procédé inverse pour retirer le wafer.
ts
Ouvrir la vanne d’Oxygène Enlever « Pompage » Attendre 3 minutes (attente Mettre « Vent » (rentrée d’air) et l’enle entend une fuite d’air.
)
i) Mettre « zéro » j) Faire entrer l’Oxygène (afficher 20) k) Mettre « Auto » puis 100 µbar et attendre l’é
passer plus ou moins d’air afin de réguler à 100 µbar pour laisser place à l’oxygènl) Allumer la RF et mettre 100 W
de s’orienter). Observation : plasma bLaisser le wafer enviro
- 26 -
Observation finale des transducteurs :
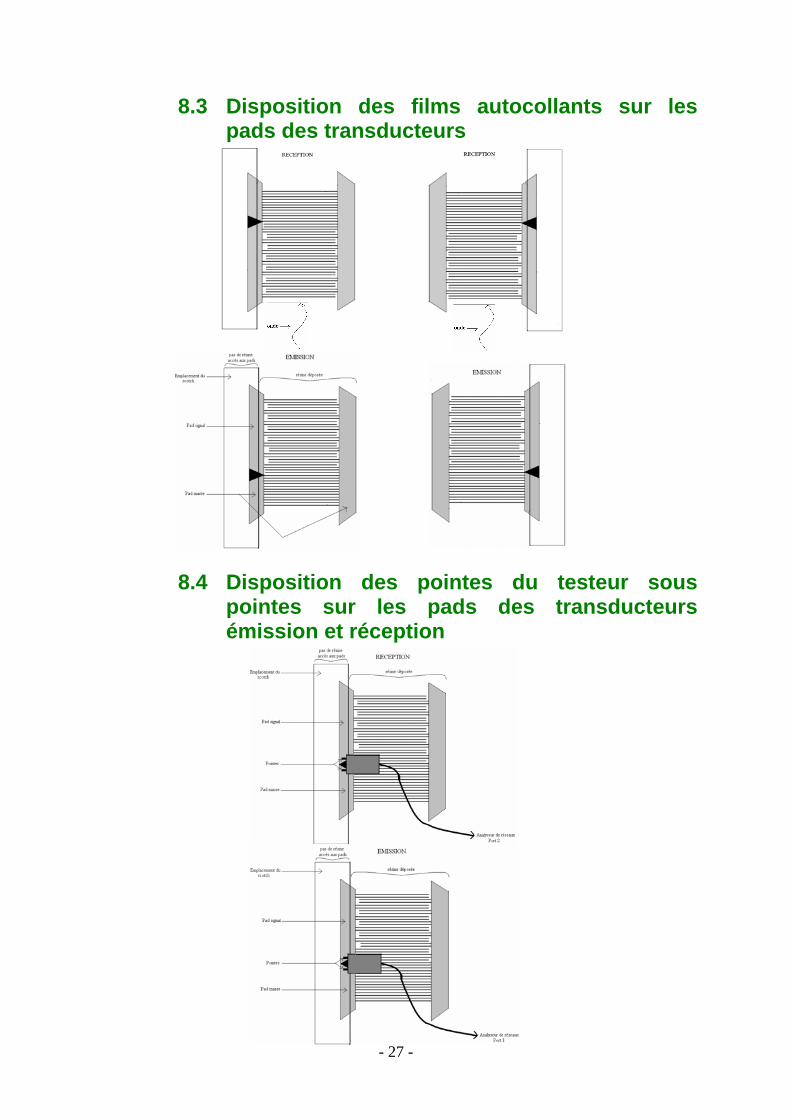
8.3 Disposition des films autocollants sur les pads des transducteurs
8.4 eur sous
eption
Disposition des pointes du testpointes sur les pads des transducteurs émission et réc
- 27 -
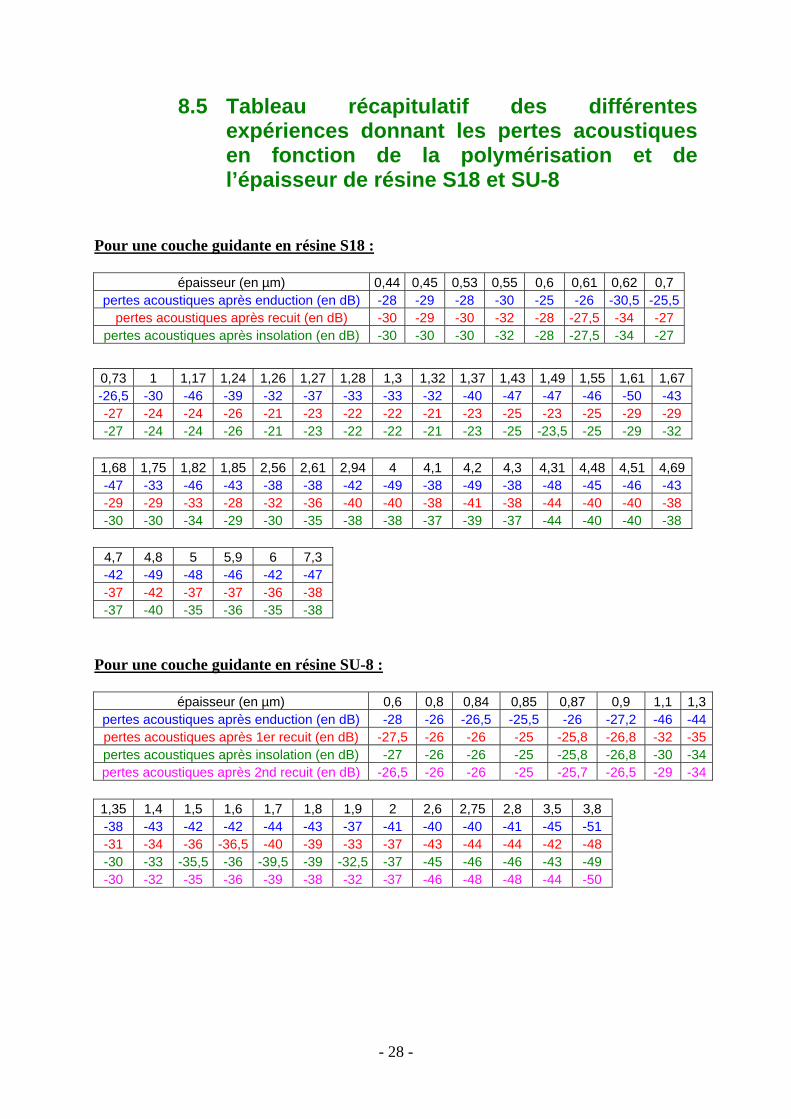
8.5 Tableau récapitulatif des différentes nnant les pertes acoustiques
de
Pou
expériences doen fonction de la polymérisation et l’épaisseur de résine S18 et SU-8
r une couche guidante en résine S18 :
épaisseur (en µm) 0,44 0,45 0,53 0,55 0,6 0,61 0,62 0,7 pertes acoustiques après enduction (en dB) -28 -29 -28 -30 -25 -26 -30,5 -25,5
pertes acoustiques après recuit (en dB) -30 -29 -30 -32 -28 -27,5 -34 -27 pertes acoustiques après insolation (en dB) -30 -30 -30 -32 -28 -27,5 -34 -27
1,17 1,24 1,26 1,27 1,28 1,3 1,32 1,370,73 1 1,43 1,49 1,55 1,61 1,67
-26,5 -30 -46 -39 -32 -37 -33 -33 -32 -40 -47 -47 -46 -50 -43 -27 -24 -24 -26 -21 -23 -22 -22 -21 -23 -25 -23 -25 -29 -29 -27 -24 -24 -26 -21 -23 -22 -22 -21 -23 -25 -23,5 -25 -29 -32
1,68 1,75 1,82 1,85 2,56 2,61 2,94 4 4,1 4,2 4,3 4,31 4,48 4,51 4,69-47 -33 -46 -43 -38 -38 -42 -49 -38 -49 -38 -48 -45 -46 -43 -29 -29 -33 -28 -32 -36 -40 -40 -38 -41 -38 -44 -40 -40 -38 -30 -30 -34 -29 -30 -35 -38 -38 -37 -39 -37 -44 -40 -40 -38
4,7 4,8 5 5,9 6 7,3 -42 -49 -48 -46 -42 -47 -37 -42 -37 -37 -36 -38 -37 -40 -35 -36 -35 -38
Pour une couche guidante en résine SU-8 :
épaisseur (en µm) 0,6 0,8 0,84 0,85 0,87 0,9 1,1 1,3
pertes acoustiques après enduction (en dB) -28 -26 -26,5 -25,5 -26 -27,2 -46 -44pertes acoustiques après 1er recuit (en dB) -27,5 -26 -26 -25 -25,8 -26,8 -32 -35pertes acoustiques après insolation (en dB) -27 -26 -26 -25 -25,8 -26,8 -30 -34pertes acoustiques après 2nd recuit (en dB) -26,5 -26 -26 -25 -25,7 -26,5 -29 -34
1,35 1,4 1,5 1,6 1,7 1,8 1,9 2 2,6 2,75 2,8 3,5 3,8 -38 -43 -42 -42 -44 -43 -37 -41 -40 -40 -41 -45 -51 -31 -34 -36 -36,5 -40 -39 -33 -37 -43 -44 -44 -42 -48 -30 -33 -35,5 -36 -39,5 -39 -32,5 -37 -45 -46 -46 -43 -49 -30 -32 -35 -36 -39 -38 -32 -37 -46 -48 -48 -44 -50
- 28 -
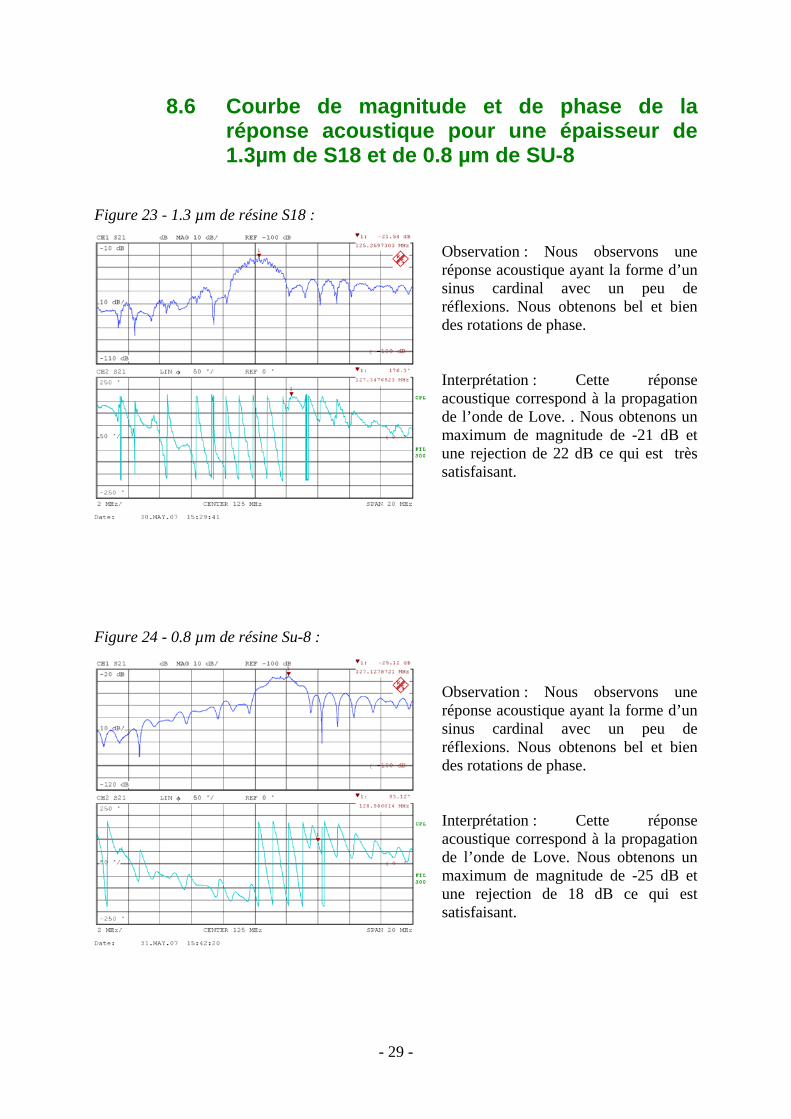
8.6 Courbe de magnitude et de phase de la réponse acoustique pour une épaisseur de 1.3µm de S18 et de 0.8 µm de SU-8
igure 23 - 1.3 µm de résine S18 :
Observation : Nous observons une réponse acoustique ayant la forme d’un sinus cardinal avec un peu de réflexions. Nous obtenons bel et bien des rotations de phase.
de l’onde de Love. . Nous obtenons un maximum de magnitude de -21 dB et une rejection de 22 dB ce qui est très satisfaisant.
F e 0 s u-
b t s se s e p a ti ay la e d’un n c a ve un eu e
réflexions. Nous obtenons bel et bien des rotations de phase. Interprétation : Cette réponse acoustique correspond à la propagation de l’onde de Love. Nous obtenons un maximum de magnitude de -25 dB et une rejection de 18 dB ce qui est
t n
F
Interprétation : Cette réponse acoustique correspond à la propagation
igur 24 - .8 µm de ré ine S 8 :
O serva ion : Nou ob rvon unré onse cous que ant formsi us ardin l a c p d
sa isfaisa t.
- 29 -
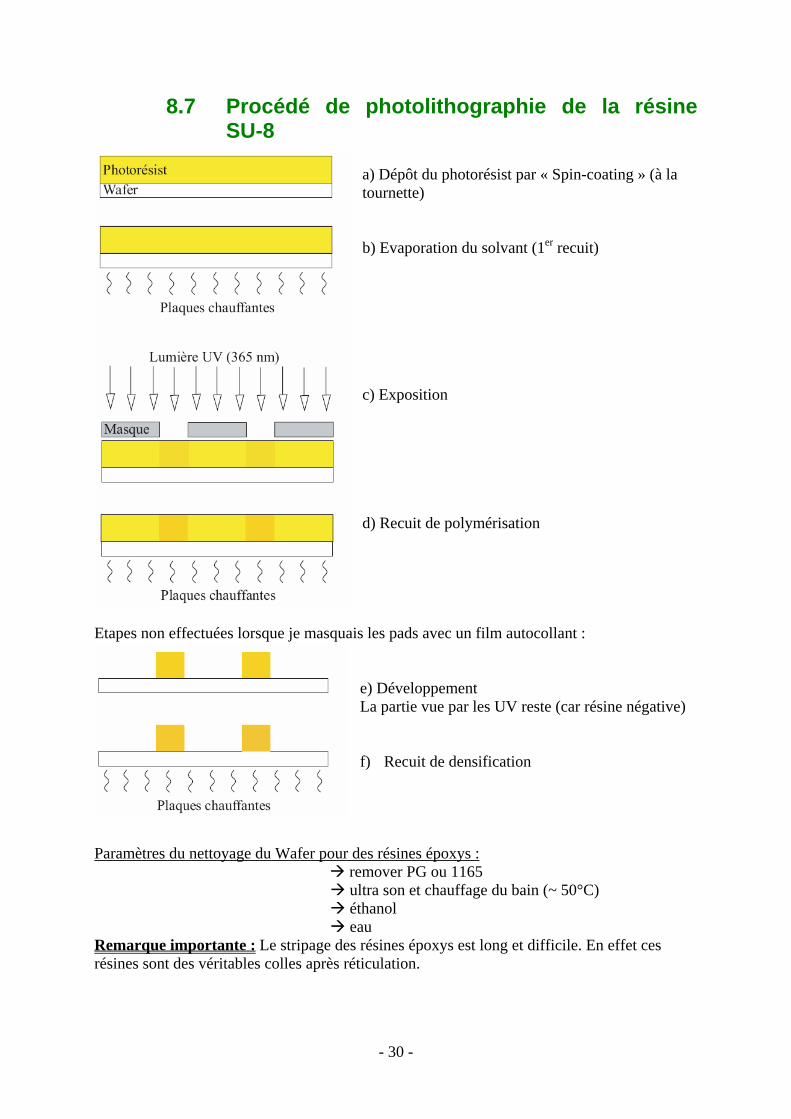
8.7 Procédé e h to a ie e résine -
) t h si r in ting » (à la tournette) b) Evaporation du solvant (1er recuit)
c) Exposition d) Recuit de
s les pads ave e) DéveloppLa partie vue par les UV reste (car résine négative) f) Recuit de densification
des résines ép
d p o lithogr ph d laSU 8
a Dépô du p otoré st pa « Sp -coa
polymérisation
c un film autocollant :
ement
Etapes non effectuées lorsque je masquai
Paramètres du nettoyage du Wafer pour oxys :
remover PG ou 1165 ultra son et chauffage du bain (~ 50°C) éthanol eau Remarque importante : Le stripage des résines époxrésines sont des véritables colles après réticulation.
ys est long et difficile. En effet ces
- 30 -

8.8 Descriptions des différentes machines
achines utilisées pour la photolithographie :
utilisées M
Machine d'enduction : tournette RC-8
escription :
D Pour les travaux de photolithographie, les résines sont enduites sur les substrats par centrifugation, opération appelée également laquage. Pour effectuer cette préparation, deux tournmise en rotournette RC-8 Karl Suss avec gyrset. Le gyrset permet d'uniformiser l'épaisseur de résine sur les substrats n'ayant pas une géométrie circulaire. Caractéristiques
ettes sont disponibles à l'institut FEMTO-ST composées d'un système permettant la tation à grande vitesse de la plaque à résiner : une tournette TP 6000 SET et une
:
• Taille max. du substrat : 4 pouces • Programmation : jusqu'à 9 programmes • Vitesse : de 10 à 5000 tr/min • Accélération : de 100 à 5000 tr/min/sec • Temps d'enduction : de 1 à 999 secondes
Aligneur double face EVG 620 : Description :
Ces machines permettent d'insoler un substrat recouvert d'une résine photosensible à travers un masque, et d'o ès révélation le motif du masque, ou son inverse si l'on travail avec une résine négative. Elles permettent aussi d'aligner le dessin du masque avec des motifs pré-existants sur le substrat pour un travail sur plusieurs niveaux. Le rayonnement ultra-violet est produit par des lampes à mercure dont les trois raies principales sont : 365 nm (i-line), 405 nm (h-line) et 436 nm (g-line). A l'Institut FEMTO - ST, nous disposons de deux aligneurs doubles faces permettant d'aligner aisément un masque avec la face de dessus du substrat ou avec la face opposée ou encore de traiter les deux faces d'un substrat en m eurs sont équipés de chambre à vide afin de réaliser de meilleu (vacuum contact). Caractéristiques
btenir ainsi apr
ême temps. Ces deux alignasque/substrat rs plaquages m
:
• Taille des masques : 3, 4 ou 5 pouces.
• Mode d'exposition : temps ou énergie co tante • Type de plaquages : proximité, soft cont , hard contact ou vacuum contact (chambre à vide) • Précision de l'alignement : 0,5 µm (align m (alignement par le dessous) • Résolution théorique :
o soft contact : < 2 µm o hard contact : 0,8 à 1,5 µm o vacuum contact : 0,6 µm
• Substrats : 2, 3 ou 4 pouces. • Puissance typique de la lampe : 13 mW/cm2
nsactement par le dessus) 1 µ
- 31 -
Machines utilisées pour la caractérisation :
Le testeur sous pontes :
éponse acoustique des différents dispositifs.
test teur est dédié aux composants basses
équences (PM8) et un second est spécialement conçus pour les tests hautes fréquences (PM5).
Caractérist
Cet appareil de mesure me permet de mesurer la r L'institut FEMTO – ST est équipé de 2 testeurs sous pointe de chez Suss Microtec pour ledes dispositifs réalisés en salle blanche. Un tesfr
iques :
• Taille des échantillons : jusqu'à 6"
• Déplacement X Y : course 150 mm • •
• Chuck : diamètre 150 mm
Résolution : 5 µm Répétabilité : 1 µm
• ajustement en Z : 10 mm • déplacement en angle : 360 °
Principe : Deux pointes reliées à l’analyseur de réseau permettent de mesurer les paramètres S. Le profilom
ètre Tencor alpha step IQ :
L’équipement Alpha-Step 500 permet de caractériser un profil de surface d'une plaque par bal g amant. Le tracé obtenu est la représentation de la v e Prin p
aya e avec un stylet dont la pointe est en diue n coupe de la zone mesurée.
ci e : Pointe venant en contact avec le substrat est suit les formes de surface du substrat.
aractéC ristiques :
• Précision : 0,1 % • Longueur max. de balayage : 10 mm de gauche à droite et 2 mm de droite à gauche • Vitesse de balayage : de 2 à 200 µm/s • Résolution latérale : donnée par la pointe diamant (cône de 60° et rayon terminal de 5 µm) • Dimensions des échantillons : 4 pouces • Hauteur des échantillons : jusqu'à 17,5 mm • Force de contact : réglable de 1 à 100 mg • Cale étalon : 6500 Å aluminium de Tencor Instruments • Hauteur de marche mesurable : de qq nm à 1 500 µm en 3 gammes : 0-20 µm, 0-400 µm, 0-2 000 µm.
- 32 -
Ma ich nes gravure sèche : Description
Le graveur RIE fluorée Plassys :
: Il s’agit d’une gravure physico-chimique, car elle met en jeu à la fois un bombardem anique, et une réaction chimique entre le gaz ionisé et les surfaces de l’échantillon. Les atomes du gaz réagissent avec les atomes de l’échantillon pour
rmer une nouvelle espèce volatile qui sera évacuée par le groupe de pompage. On parle de ravure ionique réactive (ou Reactive Ionic Etching) ou encore de gravure sèche car se éroulant au sein d’un plasma, par opposition à la gravure humide de matériau.
, puissance, température, polarisation) permet e donner plus ou moins d’importance à l’un ou l’autre des processus de gravure. En effet,
on et une température élevée vont favoriser le processus himique. Par contre, une tension de polarisation importante et une pression basse vont
nisotropes : les réactions chimiques entre le gaz et l’échantillon produisent une gravure
hoix des gaz réactifs, fluorés ou chlorés, une large gamme de matériaux peut être gravés (voir ci dessous).
tilisons également une de ces machines pour le traitement de surface par plasma : nettoyage et fonctionnalisation des surfaces pour accroître l’adhérence des polymè Caracté
ent ionique, énergie méc
fogdLe réglage des différents paramètres (pressiondune faible polarisation, une pressicfavoriser le bombardement mécanique. On peut également obtenir des gravures isotropes et asélective et isotrope alors que l'érosion de la surface dû au bombardement ionique est anisotrope et non sélectif (des flans quasi droits peuvent être obtenus en privilégiant la gravure mécanique due aux chocs des ions avec le matériau). Par le c
A l’institut, nous u
res.
ristiques :
• Puissance RF : 300 W max.
• Gaz : SF6, O2, CHF3, C2F6 • Substrat : 4 pouces max sur plateau en silice. • Détecteur de fin d'attaque : interférométrie laser 633 nanomètre • Matériaux gravés : Si, SiO2, Si3N4, Quartz, Ti, LiNbO3
- 33 -
8.9 Les résines Description : les résines sont des composés organiques (généralement des polymères
ermoplastiques) dont la solubilité est affectée par le rayonnement UV. Nous disposons de lusieurs types de résines selon le but à atteindre : les résines photosensibles
lusieurs types de résines sont disponibles selon le but à atteindre :
• les résines négatives pour lesquelles le rayonnement ultraviolet entraîne une polymérisation des zones exposées, conférant ainsi à ces zones une tenue particulière
ion alors que les parties non insolées disparaissent sélectivement dans ce solvant,(par exemple, la résine SU-8) .
• le rayonnement UV produit une transformation chimique des macromolécules, entrainant une solubilité accrue des zones exposées
thp P
au solvant de révélat
les résines positives pour lesquelles
dans le révélateur, (résines AZ 9260, S1818 et SJR 5740). • les résines inversibles, qui ont la propriété de changer de polarité suite à une étape de
recuit dit d'inversion (AZ 5214, TI09XR)
L'ensemble des résines photosensibles s'utilisent en films minces (quelques fractions de micromètre à plusieurs micromètres), uniformes, de grande qualité et adhérents.
- 34 -
9 Glossaire 1 Incubateur Un incubateur est une structure d'accompagnement de projets de
création d'entreprises innovantes. Il s'agit, avec une démarche volontariste, de valider et d'aider des projets émergents. Cette validation, réalisée en qualifiant la faisabilité technologique, la réalité économique et la qualité entrepreneuriale de l'équipe, doit permettre de donner naissance à une entreprise rentable et pérenne sur le long terme.
2 SAW ave – onde acoustique de surface
Franche-Comté Electronique Mécanique Thermique et Optique -
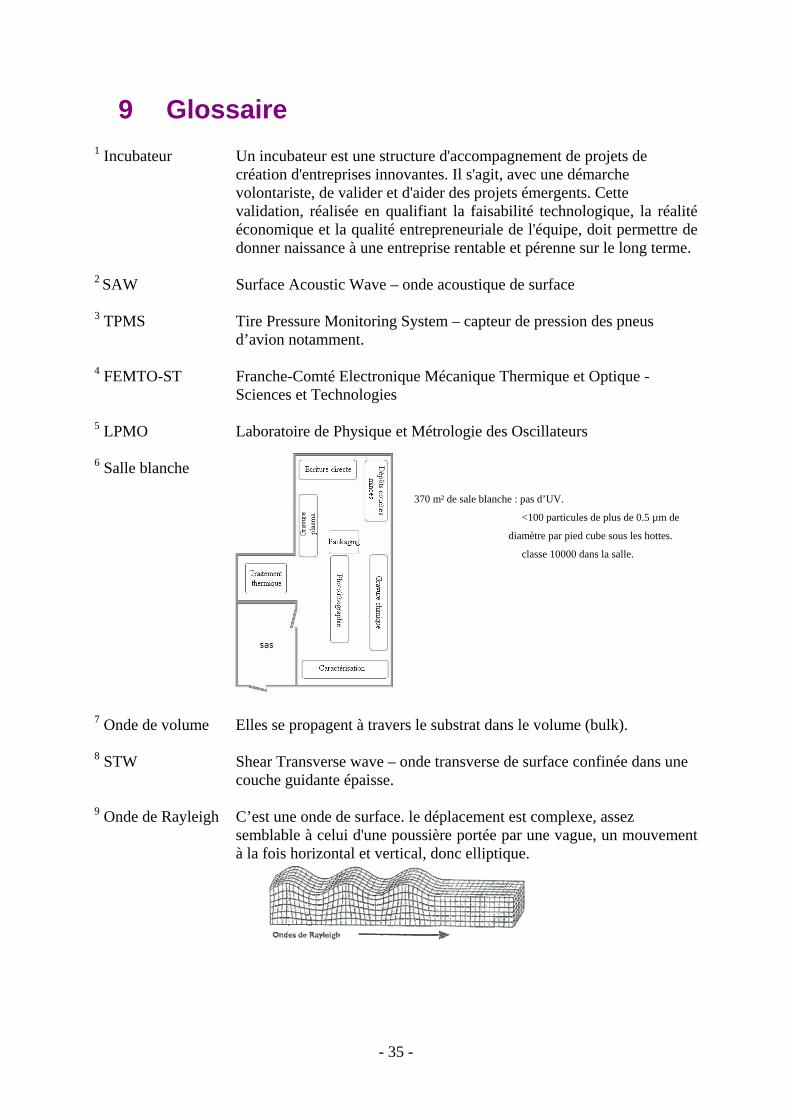
5 L O 6 Salle
mètre par pied cube sous les hottes.
Onde de volume ers le substrat dans le volume (bulk).
STW Shear Transverse wave – onde transverse de surface confinée dans une couche guidante épaisse.
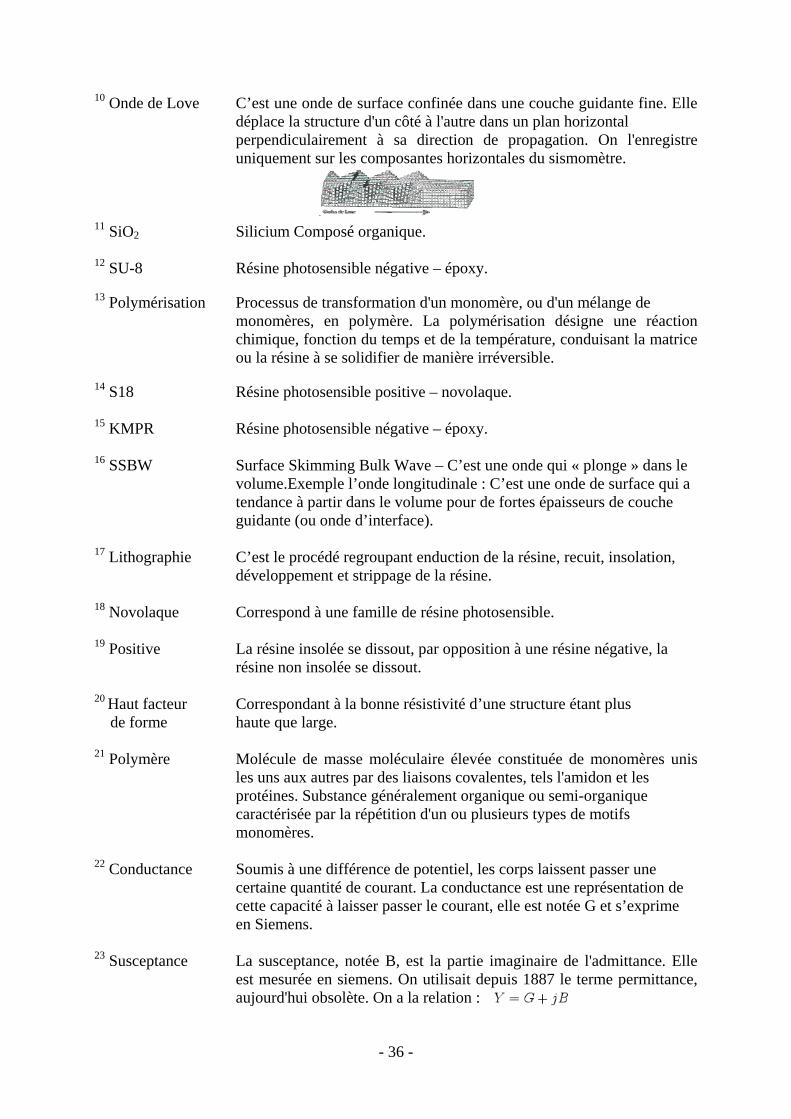
C’est une onde de surface. le déplacement est complexe, assez semblable à celui d'une poussière portée par une vague, un mouvement à la fois horizontal et vertical, donc elliptique.
Surface Acoustic W 3 TPMS Tire Pressure Monitoring System – capteur de pression des pneus d’avion notamment. 4 FEMTO-ST Sciences et Technologies
PM Laboratoire de Physique et Métrologie des Oscillateurs
blanche
370 m² de sale blanche : pas d’UV.
<100 particules de plus de 0.5 µm de
dia
classe 10000 dans la salle.
7 Elles se propagent à trav
8
9 Onde de Rayleigh
- 35 -
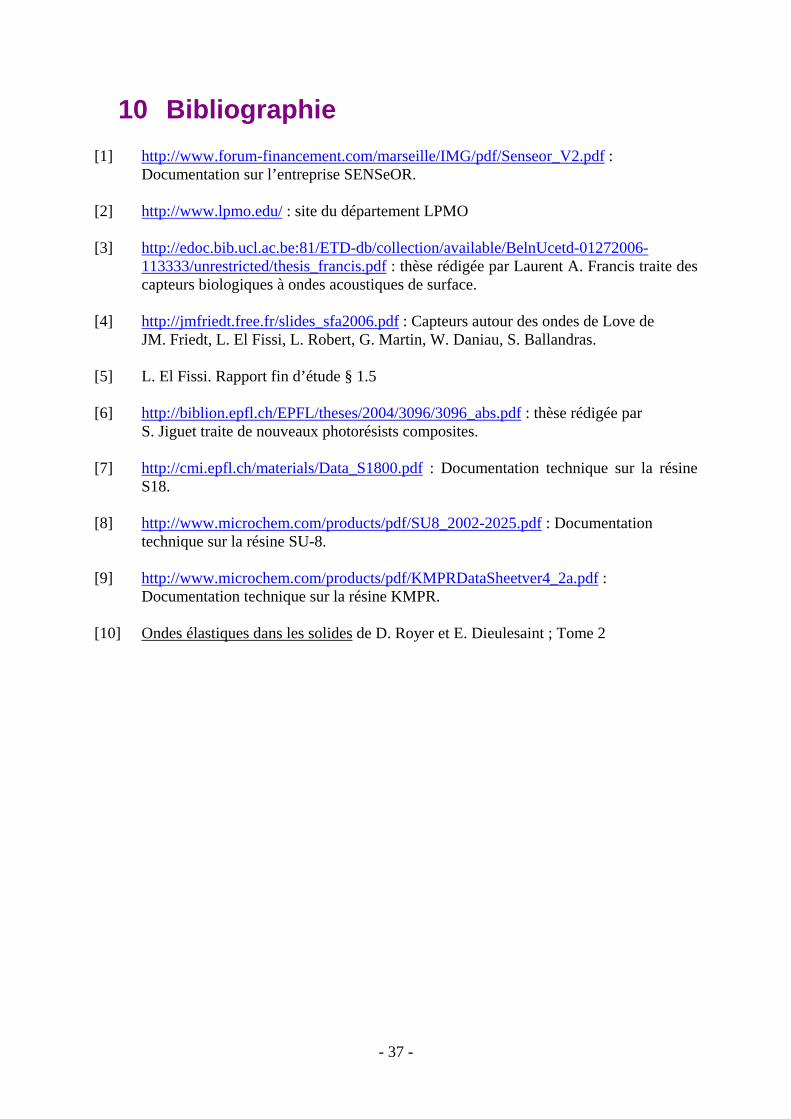
10 Onde de Love C’est une onde de surface confinée dans une couche guidante fine. Elle déplace la structure d'un côté à l'autre dans un plan horizontal perpendiculairement à sa direction de propagation. On l'enregistre uniquement sur les composantes horizontales du sismomètre.
SiO2 Silicium Composé organique. 12 S otosensible négative – époxy.
Polymérisation Processus de transformation d'un monomère, ou d'un mélange de action
matrice
14 S18
KMPR Résine photosensible négative – époxy.
SSBW Surface Skimming Bulk Wave – C’est une onde qui « plonge » dans le ui a
me pour de fortes épaisseurs de couche guidante (ou onde d’interface).
ction de la résine, recuit, insolation, développement et strippage de la résine.
Novolaque Correspond à une famille de résine photosensible.
Positive La résine insolée se dissout, par opposition à une résine négative, la résine non insolée se dissou
0 Haut facteur Correspondant à la bonne ré istivit d’une tructuforme haute que large.
1 Polymère Molécule de masse moléculaire élevée constituée de monomères unis les uns aux autres par des liaisons covalentes, tels l'amidon et les protéines. Substance généralement organique ou semi-organique caractérisée par la répétition d'un ou plusieurs types de motifs monomères.
2 Conductance Soumis à une différence de potentiel, les corps laissent passer une certaine quantité de courant. La conductance est une représentation de
prime en Siemens.
partie imaginaire de l'admittance. Elle est mesurée en siemens. On utilisait depuis 1887 le terme permittance,
aujourd'hui obsolète. On a la relation :
11
U-8 Résine ph
13
monomères, en polymère. La polymérisation désigne une ré chimique, fonction du temps et de la température, conduisant la
ou la résine à se solidifier de manière irréversible.
Résine photosensible positive – novolaque.
15
16
volume.Exemple l’onde longitudinale : C’est une onde de surface q tendance à partir dans le volu 17 Lithographie C’est le procédé regroupant endu 18
91
t. 2 s é s re étant plus de 2
2
cette capacité à laisser passer le courant, elle est notée G et s’ex 23 Susceptance La susceptance, notée B, est la
- 36 -
10 Bibliographie [1] http://www.forum-financement.com/marseille/IMG/pdf/Senseor_V2.pdf :
Documentation sur l’entreprise SENSeOR.
] http://www.lpmo.edu/
[2 : site du département LPMO
] http://edoc.bib.ucl.ac.be:81/ETD-db/collection/available/BelnUcetd-01272006- [3 113333/unrestricted/thesis_francis.pdf : thèse rédigée par Laurent A. Francis traite des
capteurs biologiques à ondes acoustiques de surface.
]
[4 http://jmfriedt.free.fr/slides_sfa2006.pdf : Capteurs autour des ondes de Love JM. Friedt, L. El Fissi, L. Robert, G. Martin, W. Daniau, S. Ballandras. [5] L. El Fissi. Rapport fin d’étu
de
] http://biblion.epfl.ch/EPFL/theses/2004/3096/3096_abs.pdf
de § 1.5 [6 : thèse rédigée par
S. Jiguet traite de nouveaux photorésists composites.
] http://cmi.epfl.ch/materials/Data_S1800.pdf
[7 : Documentation technique sur la résine
18.
.mi
S
[8] http://www crochem.com/products/pdf/SU8_2002-2025.pdf : Documentation technique sur la résine SU-8. [9] ttp://w w.mi a.pdfh w crochem.com/products/pdf/KMPRDataSheetver4_2 : Documentation technique sur la résine KMPR.
0] Ondes élastiques dans les solides [1 de D. Royer et E. Dieulesaint ; Tome 2
- 37 -