
1 page de garde youcef.pdf · Commande de la tension de sortie d’un redresseur MLI dans le cas de...
89
Ministère de l’enseignement Supérieur et de la recherche scientifique Université FERHAT ABBAS -SETIF- Faculté de technologie Département de l’électrotechnique MEMOIRE En vue de l’obtention d’un diplôme de magistère En électrotechnique Option Réseaux Electrique Thème Commande de la tension de sortie d’un redresseur MLI dans le cas de la production d’énergie éolienne Présenté par : HAMADOU youcef Soutenu le 14/12/2011 devant la commission d’examen : Mr : BELKHIAT SAAD PROF Université de SETIF Président Mr : KHENFER NABIL PROF Université de SETIF Rapporteur Mr : RAHMANI LAZHAR PROF Université de SETIF Examinateur Mr : GHARBI AHMED M.C Université de SETIF Examinateur Mr : RADJAI HAMMOUD M.C Université de SETIF Examinateur
Transcript of 1 page de garde youcef.pdf · Commande de la tension de sortie d’un redresseur MLI dans le cas de...
Ministère de l’enseignement Supérieur et de la recherche scientifique
Université FERHAT ABBAS -SETIF-
Faculté de technologie
Département de l’électrotechnique
MEMOIRE
En vue de l’obtention d’un diplôme de magistère
En électrotechnique
Option
Réseaux Electrique
Thème
Commande de la tension de sortie d’un
redresseur MLI dans le cas de la production
d’énergie éolienne
Présenté par : HAMADOU youcef
Soutenu le 14/12/2011 devant la commission d’examen :
Mr : BELKHIAT SAAD PROF Université de SETIF Président
Mr : KHENFER NABIL PROF Université de SETIF Rapporteur
Mr : RAHMANI LAZHAR PROF Université de SETIF Examinateur
Mr : GHARBI AHMED M.C Université de SETIF Examinateur
Mr : RADJAI HAMMOUD M.C Université de SETIF Examinateur
Dédicaces
Je dédie ce mémoire à : Ma très chère mère et mon père qui se sont sacrifiés tout au long de ma
vie.
Ma femme et mes enfants : AMANI, DOUNIA et WASSIM ABDERAHMAN.
Ma sœur et mes frères.
Et tous ceux qui me sont chers.
RemerciementsRemerciementsRemerciementsRemerciements
Je tiens à remercier tout premièrement Dieu le tout puissant pour la volonté, la
santé et la patience, qu’il m’a donné durant toutes ces longues années.
Je tiens à remercier vivement Monsieur LAZHAR RAHMANI Professeur et doyen
de la faculté de technologie Université de Sétif pour avoir accepté d’examiner ce travail
et pour son aide à accomplir ce travail.
Je tiens à remercier également Monsieur SAAD BELKHIAT, Professeur à
Université de Sétif, d’avoir accepté de présider mon Jury de mémoire. Je suis très
reconnaissant pour le grand honneur qu’il m’a accordé en acceptant cette tache.
J'adresse mes sincères remerciements à Messieurs
- HAMMOUD RADJAI , Maitre de conférence Université de Sétif.
- AHMED GHARBI, Maitre de conférences Université de Sétif.
Pour avoir accepté d’examiner ce travail.
Je tiens à remercier Monsieur TAREK BOUKTHIR Professeur à Université
de Sétif pour son aide et son soutien
Je tiens à remercier aussi Monsieur SAID BARKATI Maitre de conférence
Université de MSILA pour son aide et son soutien.
Sans oublier Monsieur RIADH KADRI, je le souhaite bonne chance dans son
parcourt.
En fin, je tiens à exprimer ma reconnaissance à tous mes amis et collègues pour le
soutien moral et matériel…
I
Sommaire
INTRODUCTION GENERALE.................................................................................................. 03 CHAPITRE I ETAT DE L’ART DES ENERGIES EOLIENNES I-1-INTRODUCTION ................................................................................................................ 06 I-2- DEFINITIONS DE L’ENERGIE RENOUVELABLE ....................................................... 06 I-3- LES DIFFERENTS SORTES D’ENERGIES RENOUVELABLES .................................. 06 I-3-1 Energie éolienne ............................................................................................................. 06 I-3-2 Energie solaire ................................................................................................................ 06 I-3-3 Energie hydraulique ........................................................................................................ 08 I-3-4 Energie géothermique ..................................................................................................... 09 I-3-5 La biomasse .................................................................................................................... 09 I-4-LES DIFFERENTS TYPES D’EOLIENNES ...................................................................... 10 I-4-1-Eoliennes à axe vertical .................................................................................................. 10 I-4-2-Eoliennes à axe horizontal .............................................................................................. 11 I-5-ENERGIE CINETIQUE DU VENT – CONVERSION EN ENERGIE MECANIQUE .... 11 I-5-1-loi de BETZ .................................................................................................................... 11 I-5-2-production d’énergie mécanique .................................................................................... 14 I-6-PRODUCTION OPTIMALE D'ENERGIE .......................................................................... 16 I-7-MACHINES ELECTRIQUES ET SYSTEMES DE CONVERSION D’ENERGIE EOLIENNE ................................................................................................................................. 17 I-7-1- Machines asynchrones à cage (MAS ............................................................................. 17 I-7-2-Machines asynchrones à double alimentation (MADA .................................................. 18 I-7-3-Génératrices synchrones ................................................................................................. 19 I-8-CONCLUSION ..................................................................................................................... 21
CHAPITRE II LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION
II-1-INTRODUCTION .............................................................................................................. 23 II-2-DEFINITION ..................................................................................................................... 23 II-3-FONCTIONNEMENT EN GENERATRICE A VITESSE VARIABLE .......................... 23 II-4-LES DIFFERENTES STRUCTURES A BASE DE MADA ............................................. 25 II-4-1-Double alimentation par le stator ................................................................................. 25 II-4-2- Double alimentation par le stator et le rotor ................................................................ 27 II-4-2-1- Principe ................................................................................................................. 27 II-4-2-2- Contrôle du glissement par dissipation de la puissance rotorique ........................ 29 II-4-2-3- Transfert de la puissance rotorique sur le réseau .................................................. 30 a – Principe ...................................................................................................................... 30 b - Pont à diodes et pont à thyristors ................................................................................ 30 c - Pont à diodes et pont à transistors ............................................................................... 31 d – Cycloconvertisseur .................................................................................................... 32 e - Convertisseurs MLI .................................................................................................... 33 f - Structure à trois convertisseurs MLI ........................................................................... 33 II-8-CONCLUSION .................................................................................................................. 34
II
CHAPITRE III MODELISATION DE LA MACHINE ASYNCHRONE MADA
III-1-INTRODUCTION .................................................................................................................. 36 III.2. MODELISATION DE LA MADA EN GRANDEURS DE PHASES ................................. 36 III.2.1. Hypothèses simplificatrices ............................................................................................. 36 III.2.2. Équations des tensions ..................................................................................................... 37 III.2.3. Equations des flux ............................................................................................................ 38 III.2.4. Equation mécanique ......................................................................................................... 39 III.3. MODELISATION DE LA MADA DANS UN REPERE ORTHOGONAL ........................ 40 III.3.1. La transformation de Park ................................................................................................ 40 III.3.1.1. Transformation des variables statoriques................................................................... 40 III.3.1.2. Transformation des variables rotoriques .................................................................... 41 III.3.2. Equation de la MADA dans le repère arbitraire .............................................................. 42 III.3.2.1. Equations des tensions ............................................................................................... 43 III.3.2.2. Equations des flux ...................................................................................................... 44 III.3.2.3. Equation du couple électromagnétique ...................................................................... 45 III.3.3. Le choix du référentiel ........................................................................................................ 46 III.3.3.1. Référentiel lié au stator .............................................................................................. 46 III.3.3.2. Référentiel lié au rotor ............................................................................................... 46 III.3.3.3. Référentiel lié au champ tournant .............................................................................. 47 III.4. PRINCIPE DE LA COMMANDE VECTORIELLE .......................................................... 47 III.5. MODELE DE LA MADA A FLUX STATORIQUE ORIENTE ........................................ 48 III.5.1. Expressions des puissances actives et réactive statoriques ............................................ 49 III.5.2. Expressions des tensions rotoriques ................................................................................ 50 III.6.CONTROLE INDEPENDANT DES PUISSANCES ACTIVE ET REACTIVE ....... 51 III.6.1. Commande directe .......................................................................................................... 52 III.6.2. Commande indirecte ....................................................................................................... 53 III.6.2. 1. Commande en boucle ouvert .................................................................................. 53 III.6.2.2. Commande en boucle fermé ..................................................................................... 54 III.7. MODELE DE L’ONDULEUR DE TENSION A DEUX NIVEAUX ....................... 54 III.7.1. Principe de la MLI .......................................................................................................... 56 III.8. CONCLUSION ...................................................................................................................... 57 CHAPITRE IV RESULTATS DE SIMULATION IV-1-INTRODUCTION ................................................................................................................. 60 IV-2-REPRESENTATION GLOBALE DU SYSTEME ............................................................... 60 IV-3- SIMULATION DU MODELE ............................................................................................. 62 IV-3-1-Cas d’un etat sein ............................................................................................................. 62 IV-3-2-Cas d’un defaut de creux de tension ................................................................................ 66 IV-3-3-Cas de variation de vitesse du vent .................................................................................. 70 IV-3-4-Cas d’un défaut monophasé ............................................................................................. 74 IV-4- CONCLUSION ..................................................................................................................... 77 CONCLUSION GENERALE ...................................................................................................... 79
Annexe
Bibliographie
La liste des acronymes
MADA : Machine Asynchrone Double Alimentée
MLI : Modulation de Largeur d’Impulsion
MAS : Machine Asynchrone à Cage
PMSM: Permanent Magnetic Synchronous Machine
SM: Synchronous Machine
PWM: Pulse Width Modulation
IGBT: Integrate Gate Bipolar Transistor
GTO: Gate Turn Off
FFT: Fast Fourier Transformer
THD: Total Harmonic Distortion
IGCT: Integrated Gate Commutated Thyristor
INTRODUCTION GENERALE

3
INTRODUCTION GENERALE
L’énergie et l’information sont deux éléments fondamentaux de notre société moderne,
toutes deux sont produites, transportées, transformées, stockées... De nombreuses analogies
existent entre énergie et information à ceci près que nos « manipulations » énergétiques
peuvent perturber gravement notre environnement car nos exigences en terme de transport et
de confort font croître à un rythme démesuré nos besoins énergétiques. Depuis l’aube de
l’humanité, nous brûlons des combustibles : d’abord le bois, puis les fossiles (charbon,
pétrole, gaz), enfin l’uranium, à peine plus d’un siècle.
La combustion à grande échelle des carburants fossiles conduit à des dégagements
massifs de composés divers dont on commence à soupçonner qu’ils modifient les équilibres
de la planète, par ailleurs, il est probable que nous aurons épuisé leurs réserves durant le siècle
prochain. [1]
Parallèlement, la nature nous dispense, généreusement et de façon assez bien répartie
sur la terre, une quantité d’énergie (renouvelable) très largement suffisante pour satisfaire à
nos besoins. Il existe une multitude de solutions technologiques pour l’utiliser à grande ou
petite échelle, que ce soit pour produire de la chaleur, de l’énergie mécanique ou de
l’électricité qui, à son tour, peut être transformée.
Il existe alors différentes sortes d’énergie renouvelable dont on va s’intéresser dans ce
mémoire plus particulièrement de l’énergie éolienne, où on va décrire les différents types
d’éoliennes, et les machines électriques utilisées dans ce sens. Notamment, on va étudier les
éoliennes intégrant une Machine Asynchrone à Double Alimentation. (MADA) qui permet le
fonctionnement à vitesse variable en ajustant la vitesse du rotor en fonction de la vitesse du
vent, ainsi que les différentes structures à base de cette dernière.
Le présent travail est réparti en quatre chapitres, le premier présente les divers types
de l’énergie renouvelable, notamment l’énergie éolienne, dont on a décrit les différentes
éoliennes, la production optimale d’énergie et les systèmes utilisés pour la conversion de ce
type d’énergie.
Le deuxième chapitre est consacré à la machine asynchrone à double alimentation,
fonctionnement en génératrice à vitesse variable, et les diverses structures à base de cette
dernière.

4
Dans le troisième chapitre, on présente la modélisation de la machine asynchrone à
double alimentation, le principe de la commande vectorielle, les différentes topologies de
commande, et aussi la modélisation de l’onduleur à base de la commande MLI.
Le quatrième chapitre illustre la simulation du système utilisé dans ce mémoire avec
des interprétations des résultats obtenus, et en fin, on termine ce travail par une conclusion
générale et perspective.
CHAPITRE I
ETAT DE L’ART DES ENERGIES EOLIENNES
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
6
I-1-INTRODUCTION
L’énergie est nécessaire dans toutes nos activités quotidiennes pour la production du
chauffage, de l’électricité, dans l’industrie, pour la construction et dans les transports.
L’électricité, forme propre de l’énergie par excellence, est aujourd’hui produite, à près
de 80 %, grâce à la combustion des carburants fossiles ou de l’uranium 235 (fission
nucléaire), [1] ressources épuisables. Elle contribue ainsi abondamment à la production de
déchets nuisibles pour l’environnement. Les ressources énergétiques renouvelables sont
pourtant considérables et parfaitement capables, à long terme, de satisfaire la majeure partie
de nos besoins.
Parmi toutes les énergies renouvelables contribuant à la production d’électricité,
l’énergie éolienne tient actuellement le rôle de vedette. Elle est l’une des plus prometteuses,
en termes d’écologie, de compétitivité, de champ d’application et de création d’emplois et de
richesse.
I-2- DEFINITIONS DE L’ENERGIE RENOUVELABLE
a- L’énergie renouvelable se rapporte à la puissance développée par une source
renouvelable, c'est-à-dire, quand l’énergie est produite, la ressource n’est pas épuisée. Elle est
naturellement reconstituée, ses réserves sont tellement importantes que l’homme ne puisse
jamais les épuiser. En dira alors qu’une source d’énergie est renouvelable si le fait d’en
consommer ne limite pas son utilisation future [2].
b- Les énergies renouvelables sont, à notre échelle de temps, celles qui sont dispensées
continûment par la nature, elles sont issues du rayonnement solaire, du noyau terrestre et des
interactions gravitationnelles de la lune et du soleil avec les océans. [3]
c- Le mot renouveler veut dire remplacer ,renouveler l’énergie ,c’est aussi remplacer
l’énergie fossile qui exploite le charbon, le pétrole et le gaz qui sont des réserves limités et qui
polluent l’environnement, par des énergies dont les ressources sont inépuisables et non
polluantes, qu’on appelle aussi énergie de remplacement. [3]
d- Une énergie renouvelable est une énergie dont la source est illimitée dans le temps
et non polluante et dont l’exploitation cause le moins de possibles dégâts écologiques. [4]
I-3- LES DIFFERENTS SORTES D’ENERGIES RENOUVELABLES [5]
I-3-1 Energie éolienne
Les éoliennes exploitent le mouvement de l’air pour produire de l’énergie et
cela par la conversion de l’énergie cinétique du vent en énergie mécanique ou électrique.
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
7
L’énergie éolienne est utilisée soit directement comme dans les éoliennes de pompage ou les
anciens moulins à vent (essentiellement pour moudre le grain), soit elle est transformée en
électricité via une génératrice. Dans ce cas, on parle d’aérogénérateurs [5].
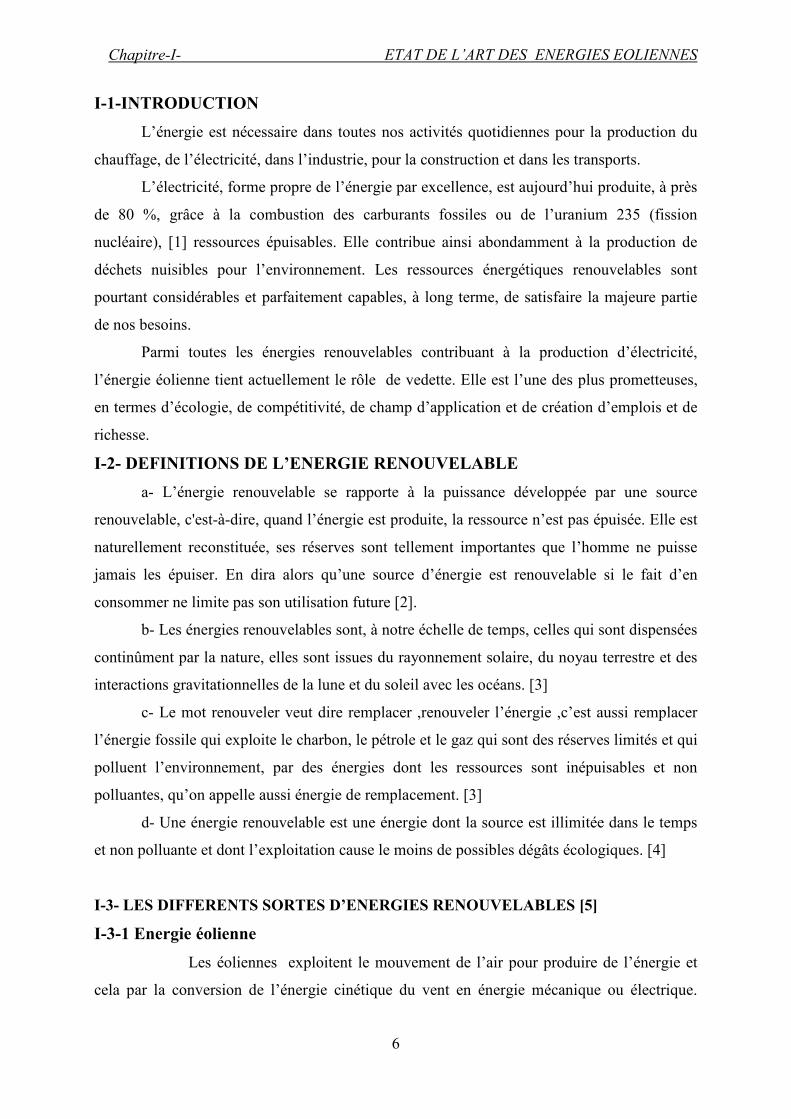
Un aérogénérateur, plus communément appelé éolienne, est un dispositif qui
transforme une partie de l'énergie cinétique du vent en énergie mécanique disponible
sur un arbre de transmission puis en énergie électrique par l'intermédiaire d'une
génératrice (Figure I-1). [6]
Figure I-1 Conversion de l'énergie cinétique du vent
Les éoliennes sont divisées en trois catégories selon leur puissance nominale [5]:
-Eoliennes de petite puissance : inférieure à kW40
-Eoliennes de moyenne puissance : de 40 à quelques centaines de kW .
-Eoliennes de forte puissance : supérieure à MW1 .
Bien sûr les fluctuations naturelles et difficilement prévisibles de la production
éolienne posent des problèmes difficiles de stabilisation des réseaux dans lesquels le stockage
d’énergie risque de se révéler indispensable. On peut noter que plus de GW5,24 étaient
installés dans le monde début 2002, pour une production annuelle estimée à kWh910.45 .
I-3-2 Energie solaire [5]
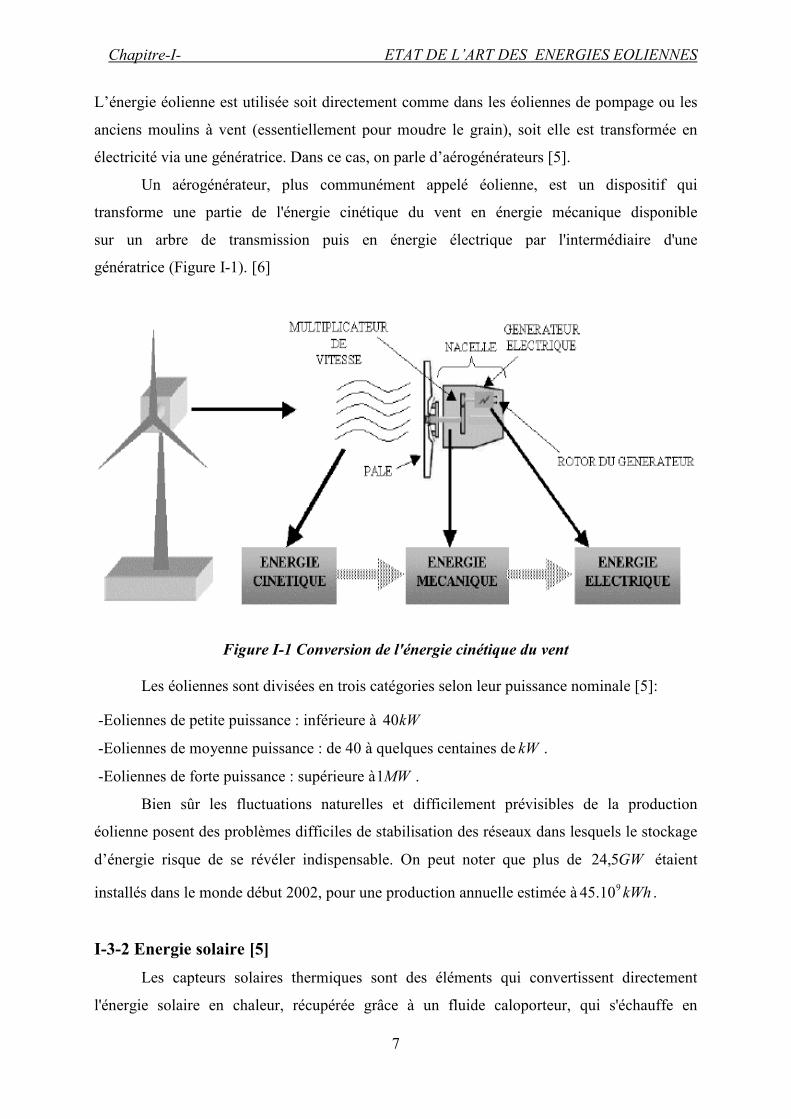
Les capteurs solaires thermiques sont des éléments qui convertissent directement
l'énergie solaire en chaleur, récupérée grâce à un fluide caloporteur, qui s'échauffe en
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
8
circulant dans un absorbeur placé sous un vitrage. Celui-ci laisse pénétrer la lumière solaire et
minimise les pertes par rayonnement infrarouge de l'absorbeur chaud en utilisant l'effet de
serre. Ce vitrage permet aussi de limiter les échanges de chaleur sensible avec l'atmosphère.
Le capteur solaire sera d'autant plus performant que le revêtement de l'absorbeur a un
coefficient d'absorption élevé et un coefficient d'émission faible. Les matériaux qui présentent
ces caractéristiques sont dits "sélectifs". Les performances du capteur sont encore améliorées
en isolant la face arrière du module.
Le fluide caloporteur chauffé par les capteurs solaires circule dans les dalles
chauffantes. Celles-ci stockent la chaleur injectée de manière irrégulière, selon
l'ensoleillement et la restituent de manière beaucoup plus régulière. Les capteurs peuvent
également participer à la production d'eau chaude sanitaire, en particulier en été, lorsque le
chauffage n'est plus utilisé.
Figure-I-2- Energie solaire photovoltaïque
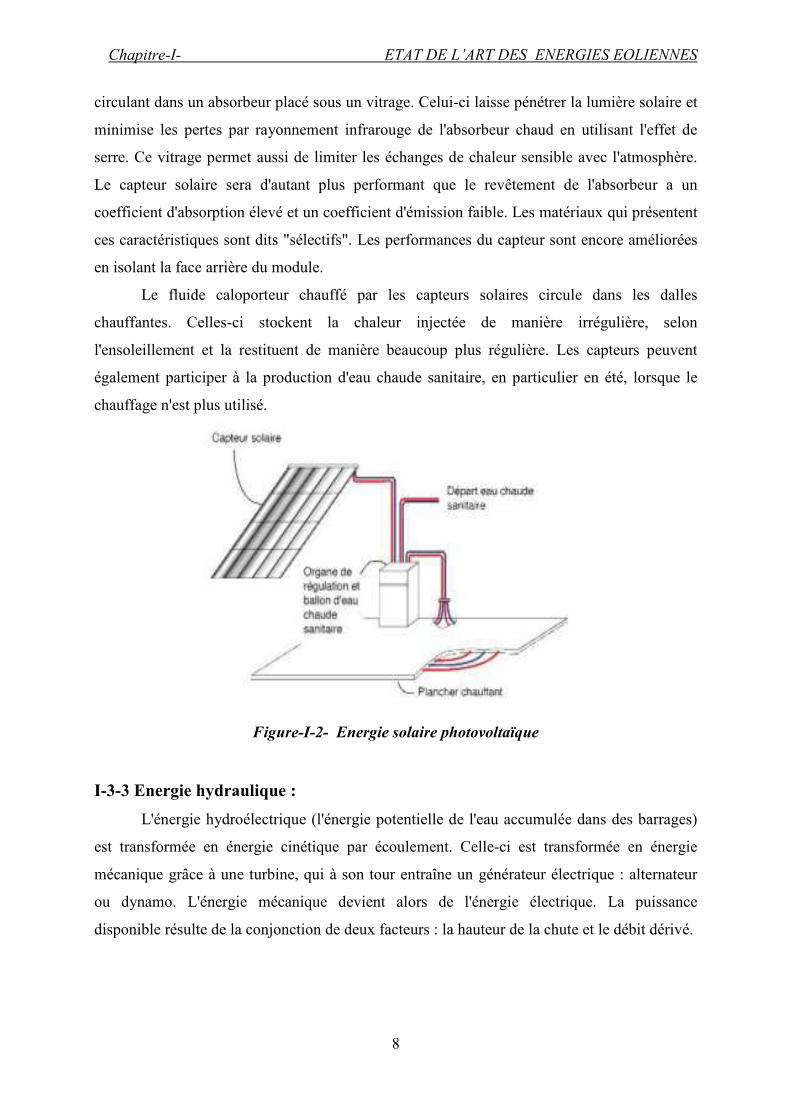
I-3-3 Energie hydraulique :
L'énergie hydroélectrique (l'énergie potentielle de l'eau accumulée dans des barrages)
est transformée en énergie cinétique par écoulement. Celle-ci est transformée en énergie
mécanique grâce à une turbine, qui à son tour entraîne un générateur électrique : alternateur
ou dynamo. L'énergie mécanique devient alors de l'énergie électrique. La puissance
disponible résulte de la conjonction de deux facteurs : la hauteur de la chute et le débit dérivé.
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
9
Figure-I-3- schémas de principe [7]
I-3-4 Energie géothermique
Le principe de la géothermie consiste à extraire l’énergie contenue dans le sol pour
l’utiliser sous forme de chauffage ou d’électricité.
Partout, la température croît depuis la surface vers l’intérieur de la Terre. Selon les
régions, l’augmentation de la température avec la profondeur est plus ou moins forte, et varie
de 3°C par 100m en moyenne jusqu’à 15 ou même 30°C. Cette chaleur est produite pour
l’essentiel par la radioactivité naturelle des roches constitutives de la croûte terrestre. Elle
provient également, pour une faible part, des échanges thermiques avec les zones internes de
la Terre dont les températures s’étagent de 1000 à 4300°C. Cependant, l’extraction de cette
chaleur n’est possible que lorsque les formations géologiques constituant le sous-sol sont
poreuses ou perméables et contiennent des aquifères (nappe souterraine renfermant de l’eau
ou de la vapeur d’eau).
I-3-5 La biomasse
La biomasse est le terme utilisé pour décrire l’ensemble des êtres vivants d’un
écosystème. Il désigne l’ensemble de la matière vivante, il s’applique aux produits
organiques, végétaux et animaux utilisés à des fins énergétiques ou agronomiques. La
biomasse contient du carbone, après combustion on obtient de l’énergie sous forme de chaleur
ou d’électricité. C’est la source la plus ancienne d’énergie renouvelable connue des hommes.

Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
10
I-4-LES DIFFERENTS TYPES D’EOLIENNES
Les éoliennes se divisent en deux grandes familles : celles à axe vertical et celles à axe
horizontal.
I-4-1-Eoliennes à axe vertical
Les éoliennes à axe vertical ont été les premières structures développées pour produire
de l’électricité paradoxalement en contradiction avec le traditionnel moulin à vent à axe
horizontal. Elles possèdent l’avantage d’avoir les organes de commande et le générateur au
niveau du sol donc facilement accessibles. De nombreuses variantes ont été testées depuis les
années vingt, dont beaucoup sans succès, mais deux structures sont parvenues au stade de
l’industrialisation [8]
Le rotor de Savonius (du nom de son inventeur, breveté en 1925) dont le
fonctionnement est basé sur le principe de "traînée différentielle" utilisé dans les anémomètres
: les efforts exercés par le vent sur chacune des faces d'un corps creux sont d'intensité
différente, il en résulte alors un couple moteur entraînant la rotation de l'ensemble. L'effet est
ici renforcé par la circulation d'air entre deux demi-cylindres qui augmente le couple moteur
(Figure I-4a).
Figure I-4 Principe du rotor de Savonius et de l'incidence variable
Les éoliennes à variation cyclique d'incidence dont la structure la plus répandue est
celle de Darrieux (ingénieur français qui déposa le brevet au début des années 30). Leur
fonctionnement est basé sur le fait qu'un profil placé dans un écoulement d'air selon différents
angles (Figure I-4b) est soumis à des forces de direction et d'intensité variables. La résultante
de ces forces génère alors un couple moteur entraînant la rotation du dispositif. Ces forces

Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
11
sont crées par la combinaison de la vitesse propre de déplacement du profil et de la vitesse du
vent. Cela signifie que la rotation du dispositif ne peut pas s'amorcer d'elle-même. Lorsqu'elle
est à l'arrêt, l'éolienne doit donc être lancée par un dispositif annexe (montage d'une éolienne
Savonius sur le même rotor ou utilisation de la génératrice en moteur).
I-4-2-Eoliennes à axe horizontal
Les éoliennes à axe horizontal sont basées sur la technologie ancestrale des moulins à
vent. Elles sont constituées de plusieurs pales profilées aérodynamiquement à la manière des
ailes d'avion. Dans ce cas, la portance n'est pas utilisée pour maintenir un avion en vol mais
pour générer un couple moteur entraînant la rotation. Le nombre de pales utilisé pour la
production d'électricité varie classiquement entre 1 et 3, le rotor tripale étant le plus utilisé car
il constitue un compromis entre le coefficient de puissance, le coût et la vitesse de rotation du
capteur éolien [9]. Ce type d'éolienne a pris le dessus sur celles à axe vertical car elles
représentent un coût moins important, elles sont moins exposées aux contraintes mécaniques
et la position du récepteur à plusieurs dizaines de mètres du sol privilégie l'efficacité. Notons
cependant que certains travaux défendent la viabilité du rotor vertical en réalisant des études
multicritères [10]. Les concepts abordés dans la suite de cette étude se limiteront uniquement
au cas des éoliennes à axe horizontal.
I-5-ENERGIE CINETIQUE DU VENT – CONVERSION EN ENERGIE
MECANIQUE
I-5-1-loi de BETZ
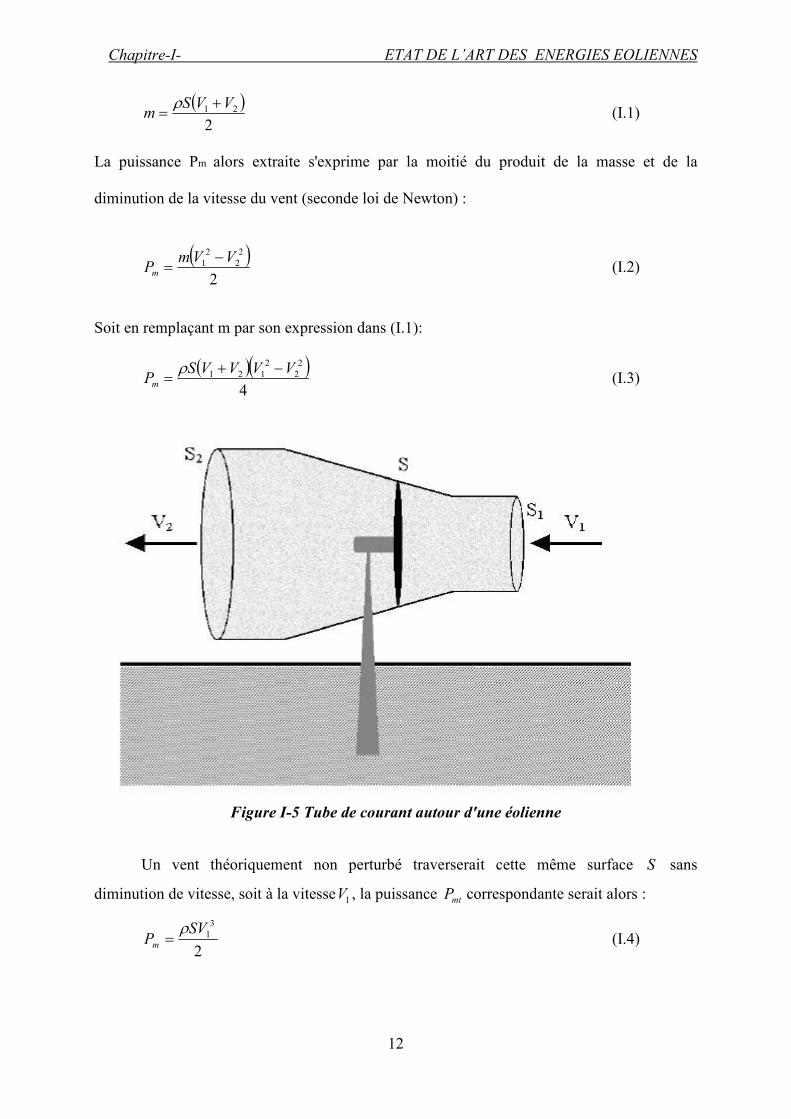
Considérons le système éolien à axe horizontal représenté sur la Figure I-5 sur lequel
on a représenté la vitesse du vent V1 en amont de l'aérogénérateur et la vitesse V2 en aval.
En supposant que la vitesse du vent traversant le rotor est égale à la moyenne entre la
vitesse du vent non perturbé à l'avant de l'éolienne V1 et la vitesse du vent après passage à
travers le rotor 2V soit 2
21 VV + , la masse d'air en mouvement de densité ρ traversant
la surface S des pales en une seconde est:
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
12
( )2
21 VVSm
+=ρ
(I.1)
La puissance Pm alors extraite s'exprime par la moitié du produit de la masse et de la
diminution de la vitesse du vent (seconde loi de Newton) :
( )2
2
2
2
1 VVmPm
−= (I.2)
Soit en remplaçant m par son expression dans (I.1):
( )( )4
2
2
2
121 VVVVSPm
−+=ρ
(I.3)
Figure I-5 Tube de courant autour d'une éolienne
Un vent théoriquement non perturbé traverserait cette même surface S sans
diminution de vitesse, soit à la vitesse 1V , la puissance mtP correspondante serait alors :
2
3
1SVPm
ρ= (I.4)
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
13
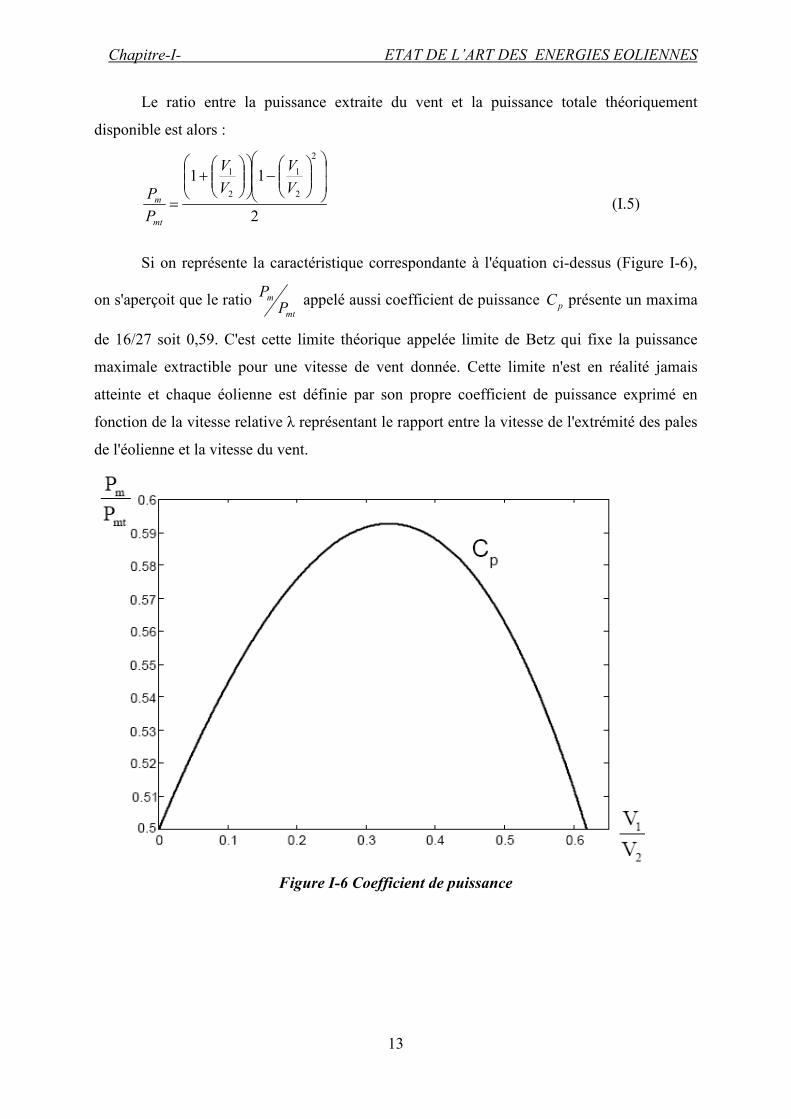
Le ratio entre la puissance extraite du vent et la puissance totale théoriquement
disponible est alors :
2
11
2
2
1
2
1
−
+
=V
V
V
V
P
P
mt
m (I.5)
Si on représente la caractéristique correspondante à l'équation ci-dessus (Figure I-6),
on s'aperçoit que le ratio mt
m
PP
appelé aussi coefficient de puissance pC présente un maxima
de 16/27 soit 0,59. C'est cette limite théorique appelée limite de Betz qui fixe la puissance
maximale extractible pour une vitesse de vent donnée. Cette limite n'est en réalité jamais
atteinte et chaque éolienne est définie par son propre coefficient de puissance exprimé en
fonction de la vitesse relative λ représentant le rapport entre la vitesse de l'extrémité des pales
de l'éolienne et la vitesse du vent.
Figure I-6 Coefficient de puissance
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
14
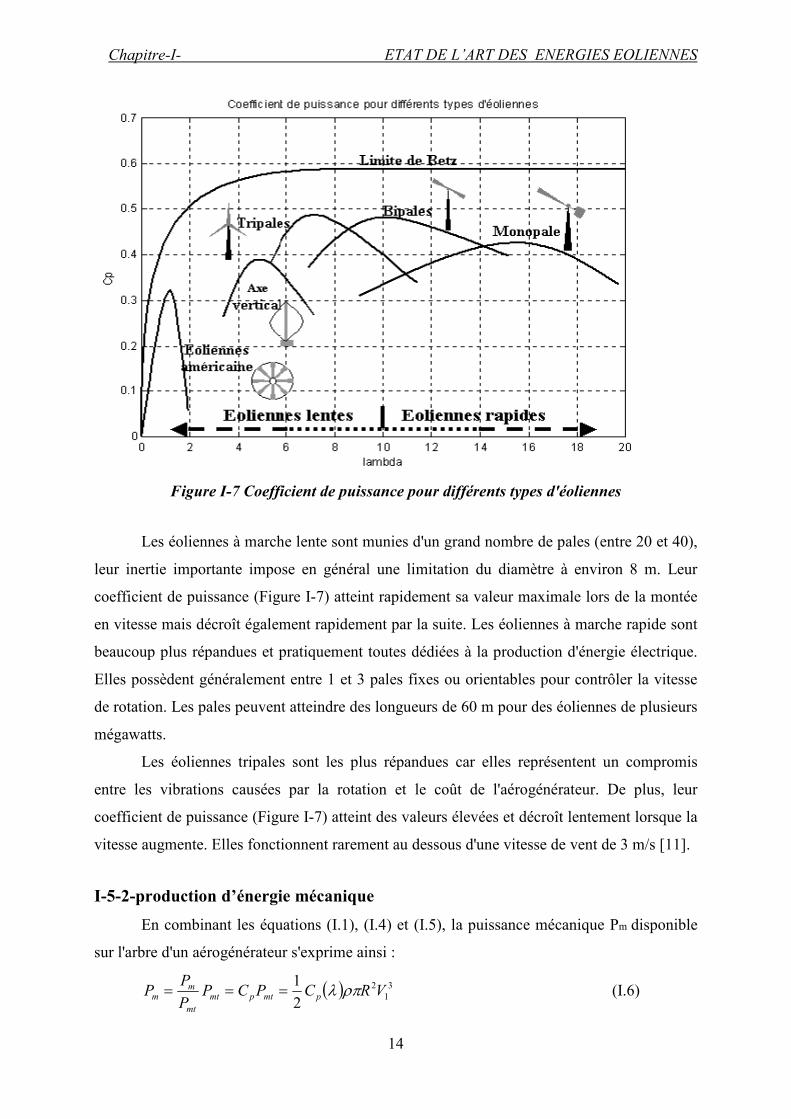
Figure I-7 Coefficient de puissance pour différents types d'éoliennes
Les éoliennes à marche lente sont munies d'un grand nombre de pales (entre 20 et 40),
leur inertie importante impose en général une limitation du diamètre à environ 8 m. Leur
coefficient de puissance (Figure I-7) atteint rapidement sa valeur maximale lors de la montée
en vitesse mais décroît également rapidement par la suite. Les éoliennes à marche rapide sont
beaucoup plus répandues et pratiquement toutes dédiées à la production d'énergie électrique.
Elles possèdent généralement entre 1 et 3 pales fixes ou orientables pour contrôler la vitesse
de rotation. Les pales peuvent atteindre des longueurs de 60 m pour des éoliennes de plusieurs
mégawatts.
Les éoliennes tripales sont les plus répandues car elles représentent un compromis
entre les vibrations causées par la rotation et le coût de l'aérogénérateur. De plus, leur
coefficient de puissance (Figure I-7) atteint des valeurs élevées et décroît lentement lorsque la
vitesse augmente. Elles fonctionnent rarement au dessous d'une vitesse de vent de 3 m/s [11].
I-5-2-production d’énergie mécanique
En combinant les équations (I.1), (I.4) et (I.5), la puissance mécanique Pm disponible
sur l'arbre d'un aérogénérateur s'exprime ainsi :
( ) 3
1
2
2
1VRCPCP
P
PP pmtpmt
mt
mm ρπλ=== (I.6)
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
15
Avec :
1
1
V
RΩ=λ
1Ω : vitesse de rotation avant multiplicateur et R : rayon de l'aérogénérateur.
Compte tenu du rapport du multiplicateur de vitesse K, la puissance mécanique mgP
disponible sur l'arbre du générateur électrique s'exprime par :
3
1
2
1
2
2
1VR
KV
RCP pmg ρπ
Ω= (I.7)
Avec 2Ω : vitesse de rotation après multiplicateur.
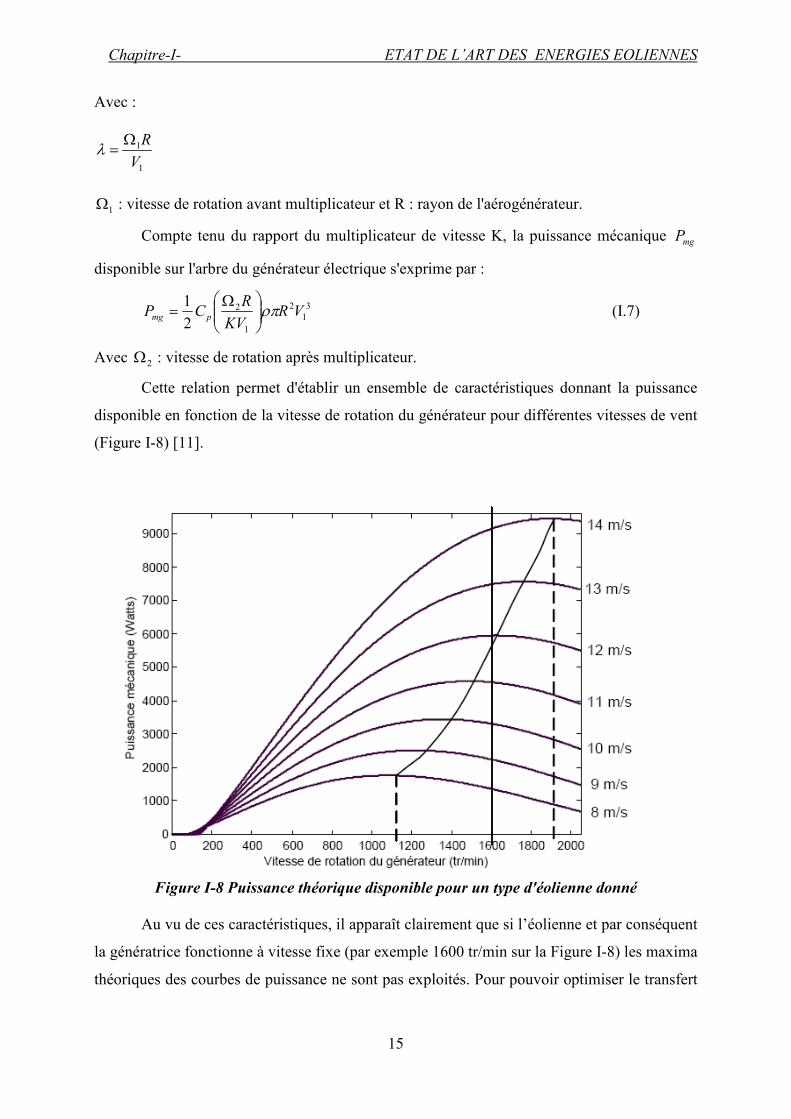
Cette relation permet d'établir un ensemble de caractéristiques donnant la puissance
disponible en fonction de la vitesse de rotation du générateur pour différentes vitesses de vent
(Figure I-8) [11].
Figure I-8 Puissance théorique disponible pour un type d'éolienne donné
Au vu de ces caractéristiques, il apparaît clairement que si l’éolienne et par conséquent
la génératrice fonctionne à vitesse fixe (par exemple 1600 tr/min sur la Figure I-8) les maxima
théoriques des courbes de puissance ne sont pas exploités. Pour pouvoir optimiser le transfert
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
16
de puissance et ainsi obtenir le maximum théorique pour chaque vitesse de vent, la machine
devra pouvoir fonctionner entre 1100 et 1900 tr/min pour cet exemple.
I-6-PRODUCTION OPTIMALE D'ENERGIE
Dans un système de production d'énergie par éolienne fonctionnant à vitesse variable,
on cherchera systématiquement le régime optimal en exploitant les maxima du réseau de
courbes de la Figure I-8. Ce qui signifie que pour un régime de fonctionnement donné (vitesse
du vent fixe) on souhaite que la puissance fournie soit maximale ce qui correspond à une
valeur de λ donnée appelée optλ . La vitesse de rotation optimale optΩ résultante est alors
donnée par :
vR
opt
opt ⋅=Ωλ
(I.8)
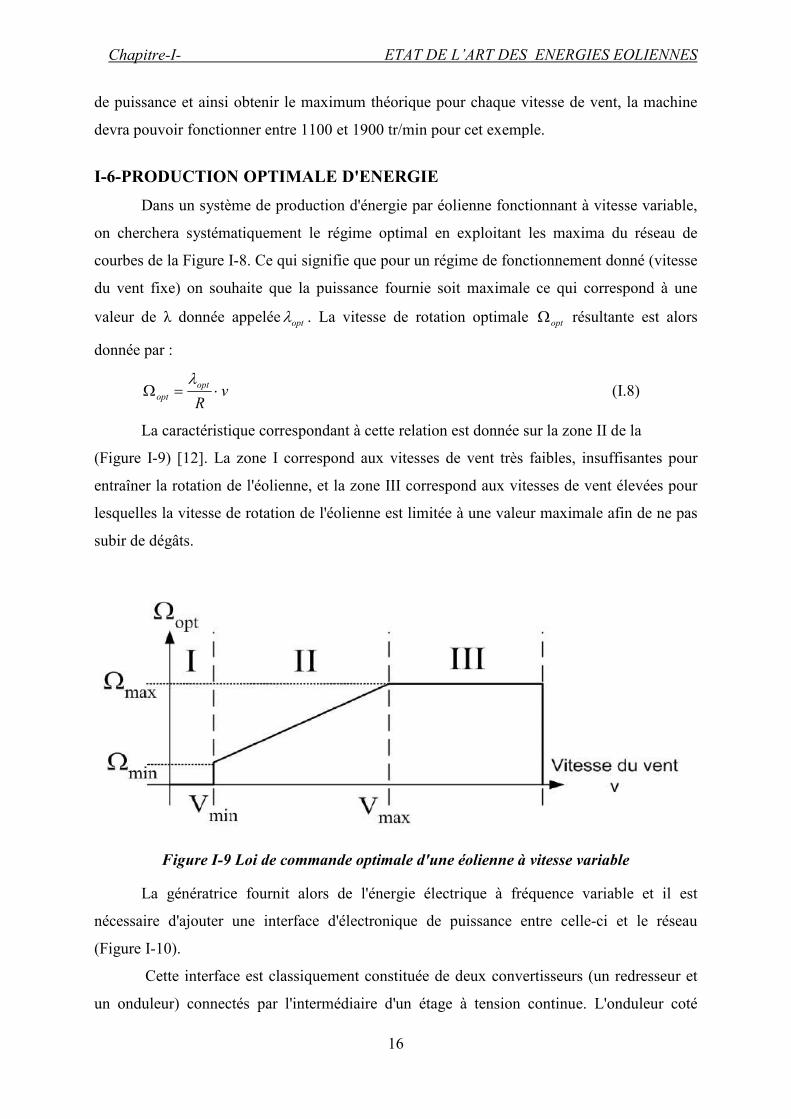
La caractéristique correspondant à cette relation est donnée sur la zone II de la
(Figure I-9) [12]. La zone I correspond aux vitesses de vent très faibles, insuffisantes pour
entraîner la rotation de l'éolienne, et la zone III correspond aux vitesses de vent élevées pour
lesquelles la vitesse de rotation de l'éolienne est limitée à une valeur maximale afin de ne pas
subir de dégâts.
Figure I-9 Loi de commande optimale d'une éolienne à vitesse variable
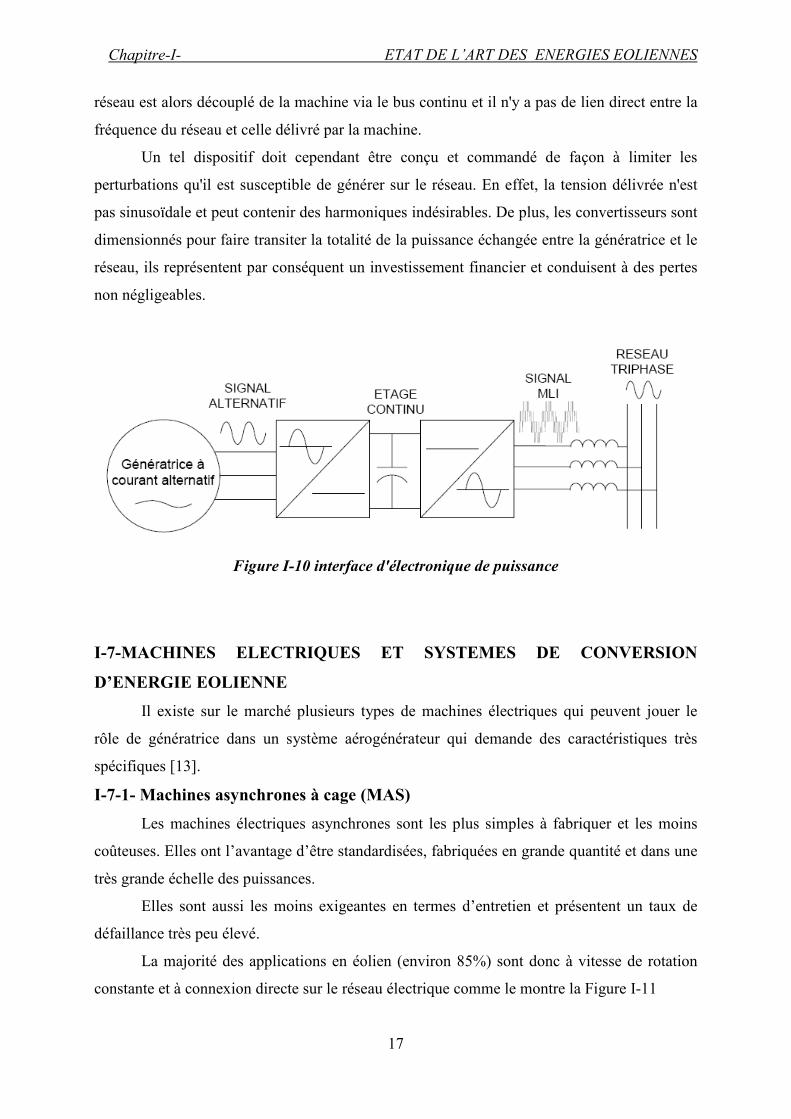
La génératrice fournit alors de l'énergie électrique à fréquence variable et il est
nécessaire d'ajouter une interface d'électronique de puissance entre celle-ci et le réseau
(Figure I-10).
Cette interface est classiquement constituée de deux convertisseurs (un redresseur et
un onduleur) connectés par l'intermédiaire d'un étage à tension continue. L'onduleur coté
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
17
réseau est alors découplé de la machine via le bus continu et il n'y a pas de lien direct entre la
fréquence du réseau et celle délivré par la machine.
Un tel dispositif doit cependant être conçu et commandé de façon à limiter les
perturbations qu'il est susceptible de générer sur le réseau. En effet, la tension délivrée n'est
pas sinusoïdale et peut contenir des harmoniques indésirables. De plus, les convertisseurs sont
dimensionnés pour faire transiter la totalité de la puissance échangée entre la génératrice et le
réseau, ils représentent par conséquent un investissement financier et conduisent à des pertes
non négligeables.
Figure I-10 interface d'électronique de puissance
I-7-MACHINES ELECTRIQUES ET SYSTEMES DE CONVERSION
D’ENERGIE EOLIENNE
Il existe sur le marché plusieurs types de machines électriques qui peuvent jouer le
rôle de génératrice dans un système aérogénérateur qui demande des caractéristiques très
spécifiques [13].
I-7-1- Machines asynchrones à cage (MAS)
Les machines électriques asynchrones sont les plus simples à fabriquer et les moins
coûteuses. Elles ont l’avantage d’être standardisées, fabriquées en grande quantité et dans une
très grande échelle des puissances.
Elles sont aussi les moins exigeantes en termes d’entretien et présentent un taux de
défaillance très peu élevé.
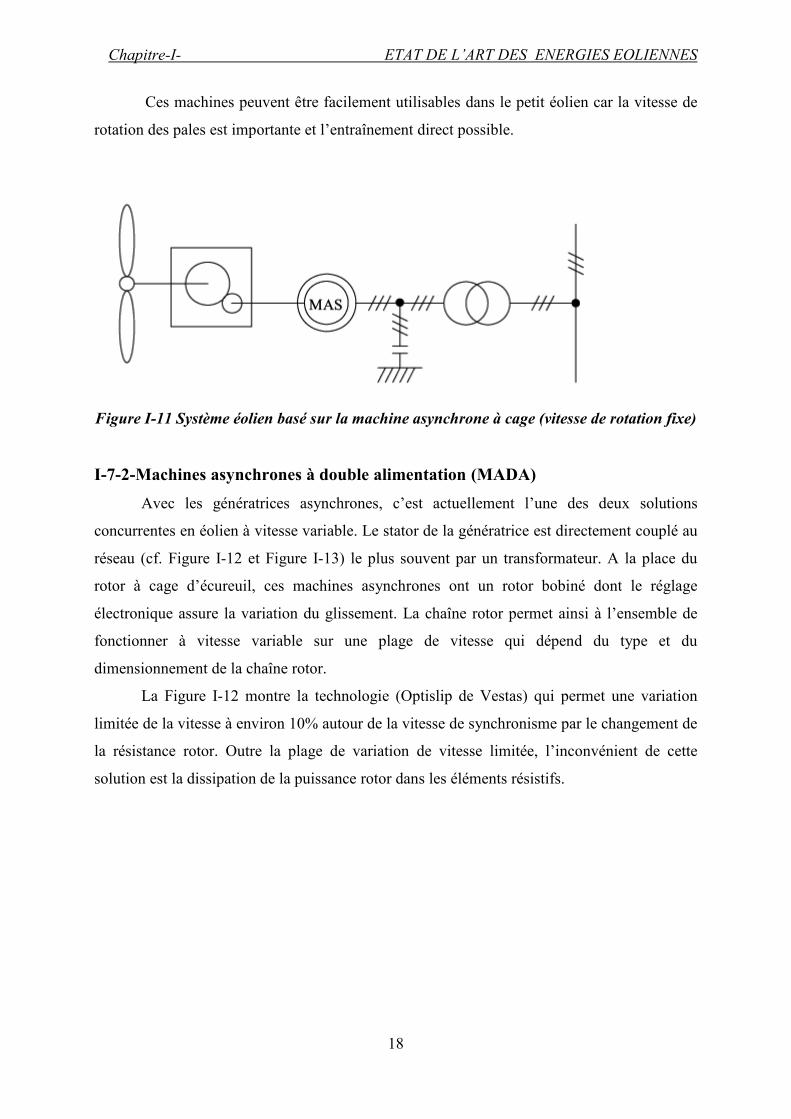
La majorité des applications en éolien (environ 85%) sont donc à vitesse de rotation
constante et à connexion directe sur le réseau électrique comme le montre la Figure I-11
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
18
Ces machines peuvent être facilement utilisables dans le petit éolien car la vitesse de
rotation des pales est importante et l’entraînement direct possible.
Figure I-11 Système éolien basé sur la machine asynchrone à cage (vitesse de rotation fixe)
I-7-2-Machines asynchrones à double alimentation (MADA)
Avec les génératrices asynchrones, c’est actuellement l’une des deux solutions
concurrentes en éolien à vitesse variable. Le stator de la génératrice est directement couplé au
réseau (cf. Figure I-12 et Figure I-13) le plus souvent par un transformateur. A la place du
rotor à cage d’écureuil, ces machines asynchrones ont un rotor bobiné dont le réglage
électronique assure la variation du glissement. La chaîne rotor permet ainsi à l’ensemble de
fonctionner à vitesse variable sur une plage de vitesse qui dépend du type et du
dimensionnement de la chaîne rotor.
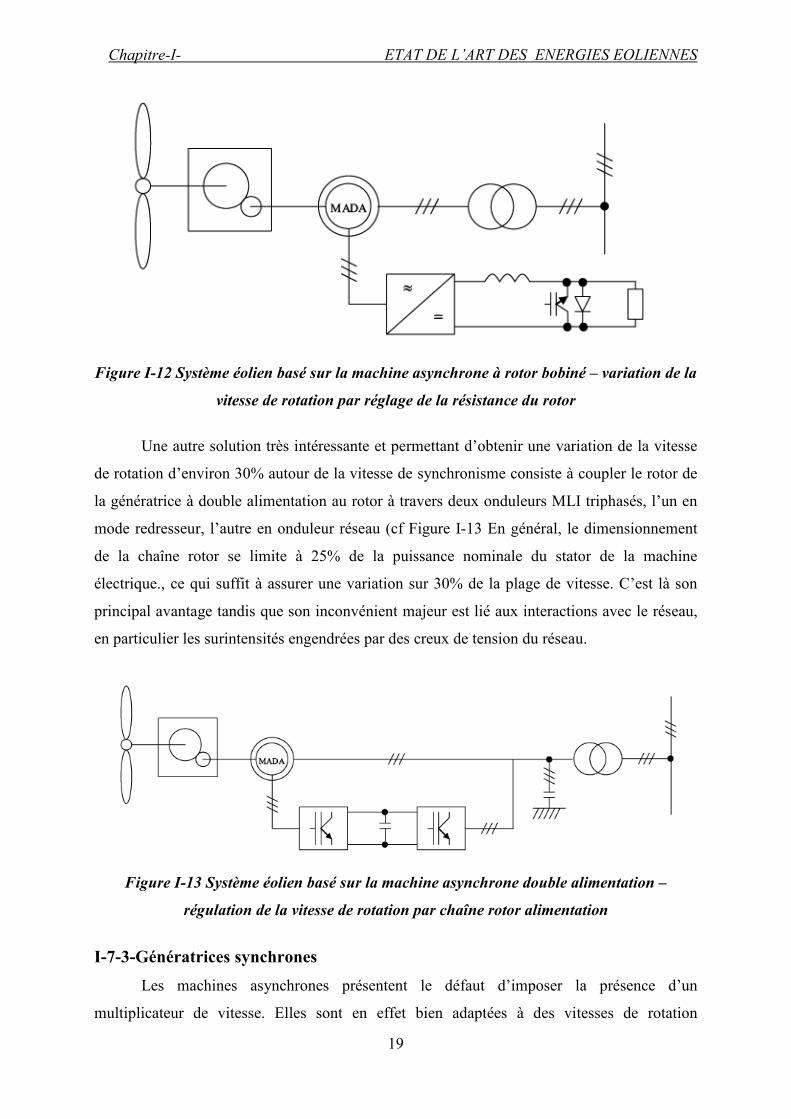
La Figure I-12 montre la technologie (Optislip de Vestas) qui permet une variation
limitée de la vitesse à environ 10% autour de la vitesse de synchronisme par le changement de
la résistance rotor. Outre la plage de variation de vitesse limitée, l’inconvénient de cette
solution est la dissipation de la puissance rotor dans les éléments résistifs.
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
19
Figure I-12 Système éolien basé sur la machine asynchrone à rotor bobiné – variation de la
vitesse de rotation par réglage de la résistance du rotor
Une autre solution très intéressante et permettant d’obtenir une variation de la vitesse
de rotation d’environ 30% autour de la vitesse de synchronisme consiste à coupler le rotor de
la génératrice à double alimentation au rotor à travers deux onduleurs MLI triphasés, l’un en
mode redresseur, l’autre en onduleur réseau (cf Figure I-13 En général, le dimensionnement
de la chaîne rotor se limite à 25% de la puissance nominale du stator de la machine
électrique., ce qui suffit à assurer une variation sur 30% de la plage de vitesse. C’est là son
principal avantage tandis que son inconvénient majeur est lié aux interactions avec le réseau,
en particulier les surintensités engendrées par des creux de tension du réseau.
Figure I-13 Système éolien basé sur la machine asynchrone double alimentation –
régulation de la vitesse de rotation par chaîne rotor alimentation
I-7-3-Génératrices synchrones
Les machines asynchrones présentent le défaut d’imposer la présence d’un
multiplicateur de vitesse. Elles sont en effet bien adaptées à des vitesses de rotation
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
20
relativement importantes et un couple insuffisant pour un couplage mécanique direct sur les
voilures éoliennes. Par contre, les machines synchrones sont connues pour offrir des couples
très importants à dimensions géométriques convenables.
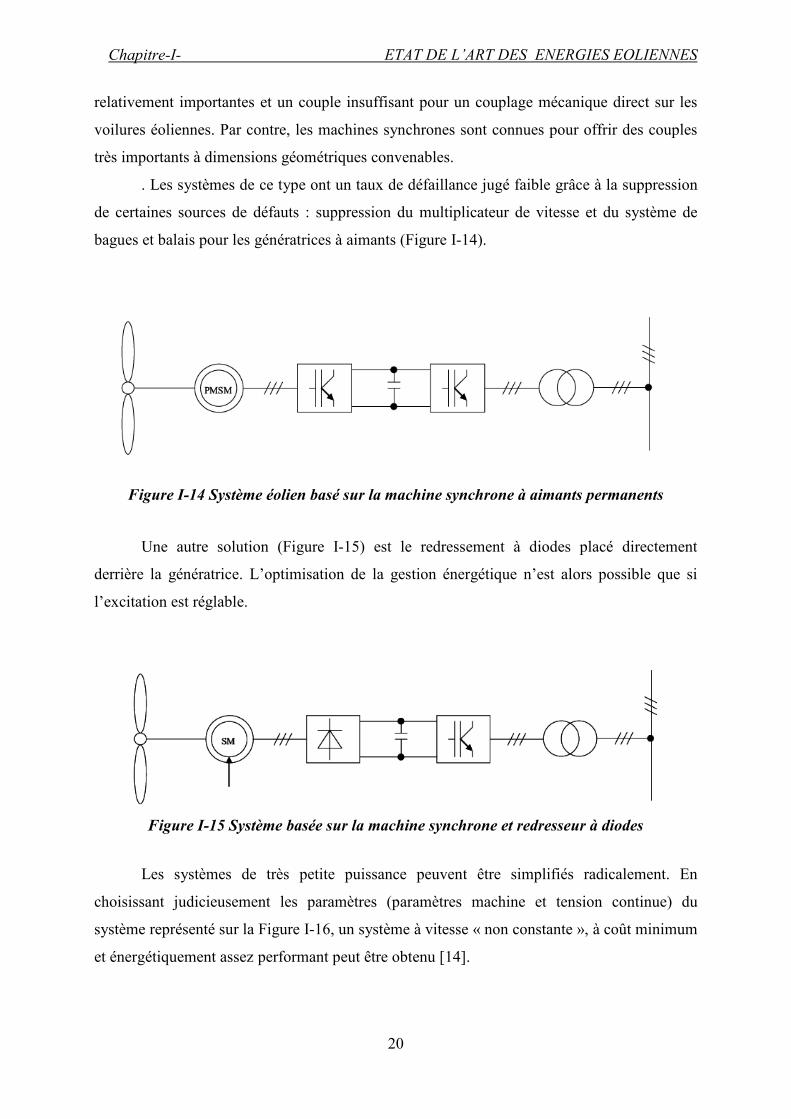
. Les systèmes de ce type ont un taux de défaillance jugé faible grâce à la suppression
de certaines sources de défauts : suppression du multiplicateur de vitesse et du système de
bagues et balais pour les génératrices à aimants (Figure I-14).
Figure I-14 Système éolien basé sur la machine synchrone à aimants permanents
Une autre solution (Figure I-15) est le redressement à diodes placé directement
derrière la génératrice. L’optimisation de la gestion énergétique n’est alors possible que si
l’excitation est réglable.
Figure I-15 Système basée sur la machine synchrone et redresseur à diodes
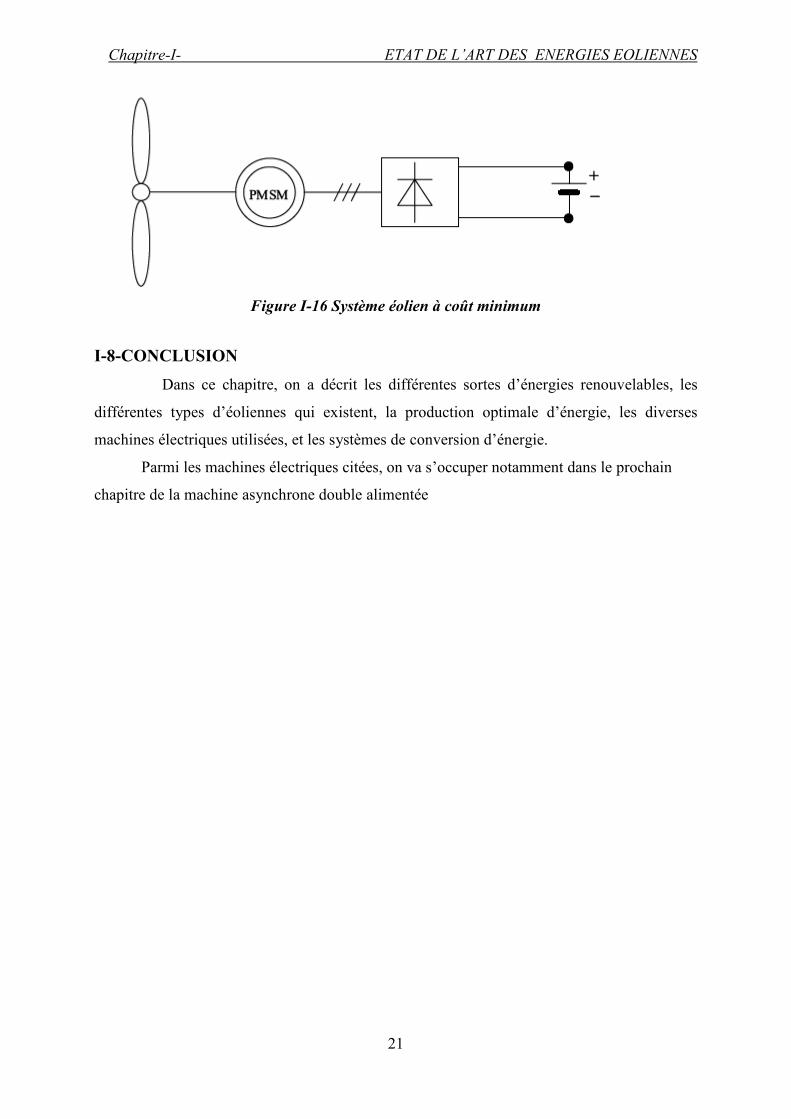
Les systèmes de très petite puissance peuvent être simplifiés radicalement. En
choisissant judicieusement les paramètres (paramètres machine et tension continue) du
système représenté sur la Figure I-16, un système à vitesse « non constante », à coût minimum
et énergétiquement assez performant peut être obtenu [14].
Chapitre-I- ETAT DE L’ART DES ENERGIES EOLIENNES
21
Figure I-16 Système éolien à coût minimum
I-8-CONCLUSION
Dans ce chapitre, on a décrit les différentes sortes d’énergies renouvelables, les
différentes types d’éoliennes qui existent, la production optimale d’énergie, les diverses
machines électriques utilisées, et les systèmes de conversion d’énergie.
Parmi les machines électriques citées, on va s’occuper notamment dans le prochain
chapitre de la machine asynchrone double alimentée

CHAPITRE II
LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION

CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
23
II-1-INTRODUCTION
Les machines électriques sont utilisées depuis longtemps pour produire de l’énergie
électrique ou mécanique, au fil du temps, cette tendance s’est accentuée à la fois dans les
domaines industriels et domestiques. Ces modes de production ainsi que les moyens de
production associés sont amenés à subir de profonds changements au cours des prochaines
décennies.
La machine à double alimentation (MADA) porte un caractère qui permet à cette
dernière d’occuper un large domaine d’application, soit dans les entraînements à vitesse
variable (fonctionnement moteur), soit dans les applications à vitesse variable et à fréquence
constante (fonctionnement générateur). Dans ce chapitre nous allons présenter des généralités
sur la MADA, ses applications, ses variantes de fonctionnement et ses avantages.
II-2-DEFINITION
Connue depuis 1899 [15], la machine à induction double alimentée, DFIM (de
l’anglais, Doubly fed induction machine), est une machine asynchrone triphasée à rotor
bobiné alimentée par ses deux armatures : le stator et le rotor .Elle a été d’abord étudiée pour
être utilisée en tant que moteur à grande vitesse.
Les problèmes d’instabilités rencontrées dés lors l’ont fait abandonner pour un temps.
Grâce au progrès des technologies, diverses applications de la MADA sont alors devenues
possibles dont l’intérêt réside principalement dans les possibilités de contrôle de flux des
puissances pour les régimes caractéristiques hypo et hyper-synchrones, cela étant aussi bien
dans les fonctionnements moteur que générateur. Dans ce contexte, la théorie de l’orientation
du flux, apparue dans le début des années 70 [16], appliquée à la MADA avec succès a donner
lieu à un outil puissant pour son contrôle.
II-3-FONCTIONNEMENT EN GENERATRICE A VITESSE VARIABLE
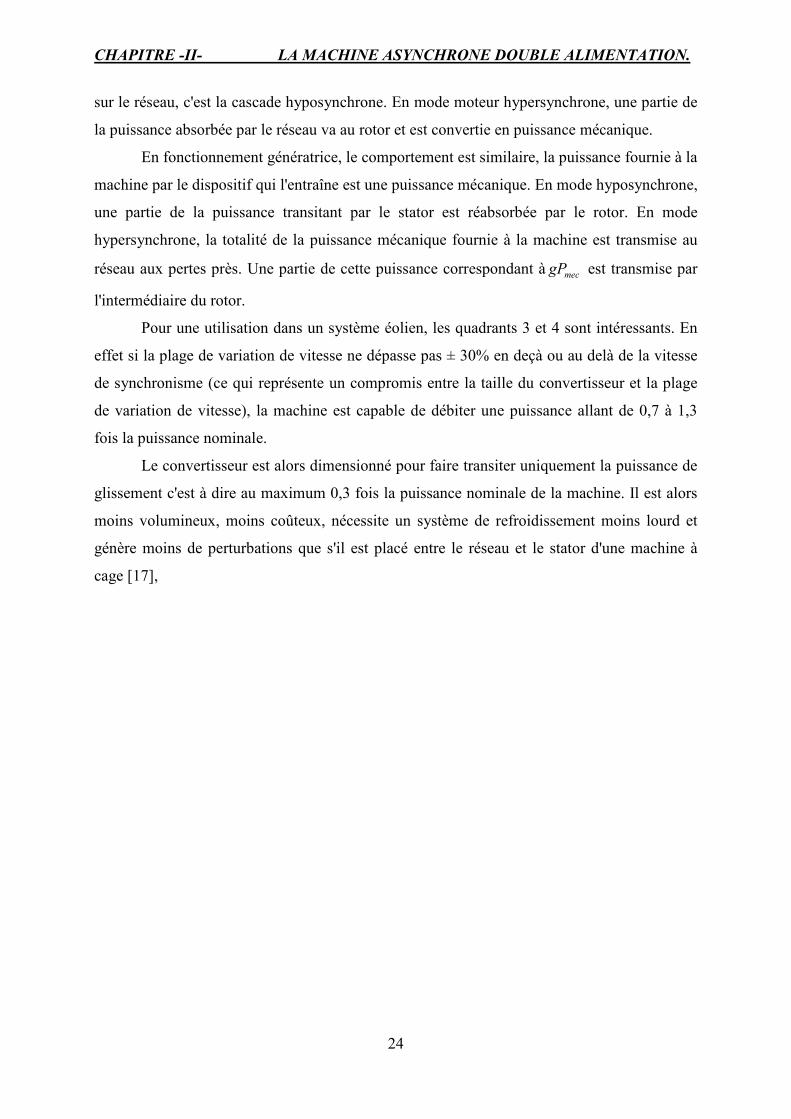
La Figure II-1 montre les différentes configurations de fonctionnement de la machine
asynchrone à double alimentation dont le stator est relié directement au réseau et dont le rotor
est relié au réseau par l'intermédiaire d'un convertisseur (structure Scherbius PWM). resP est la
puissance délivrée au réseau ou fournie par le réseau, sP la puissance transitant par le stator,
rP la puissance transitant par le rotor, et mecP , la puissance mécanique.
Lorsque la machine fonctionne en moteur, la puissance est fournie par le réseau. Si la
vitesse de rotation est inférieure au synchronisme, "la puissance de glissement" est renvoyée
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
24
sur le réseau, c'est la cascade hyposynchrone. En mode moteur hypersynchrone, une partie de
la puissance absorbée par le réseau va au rotor et est convertie en puissance mécanique.
En fonctionnement génératrice, le comportement est similaire, la puissance fournie à la
machine par le dispositif qui l'entraîne est une puissance mécanique. En mode hyposynchrone,
une partie de la puissance transitant par le stator est réabsorbée par le rotor. En mode
hypersynchrone, la totalité de la puissance mécanique fournie à la machine est transmise au
réseau aux pertes près. Une partie de cette puissance correspondant à mecgP est transmise par
l'intermédiaire du rotor.
Pour une utilisation dans un système éolien, les quadrants 3 et 4 sont intéressants. En
effet si la plage de variation de vitesse ne dépasse pas ± 30% en deçà ou au delà de la vitesse
de synchronisme (ce qui représente un compromis entre la taille du convertisseur et la plage
de variation de vitesse), la machine est capable de débiter une puissance allant de 0,7 à 1,3
fois la puissance nominale.
Le convertisseur est alors dimensionné pour faire transiter uniquement la puissance de
glissement c'est à dire au maximum 0,3 fois la puissance nominale de la machine. Il est alors
moins volumineux, moins coûteux, nécessite un système de refroidissement moins lourd et
génère moins de perturbations que s'il est placé entre le réseau et le stator d'une machine à
cage [17],
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
25
Figure II-1 Quadrants de fonctionnement de la machine asynchrone à double alimentation
II-4-LES DIFFERENTES STRUCTURES A BASE DE MADA
Plusieurs technologies de machines asynchrones à double alimentation ainsi que
plusieurs dispositifs d’alimentation sont envisageables :
II-4-1-Double alimentation par le stator :
Pour réaliser une double alimentation par le stator, la machine asynchrone est munie
de deux bobinages statoriques distincts (Figure II-2).
STATOR
ROTOR PMEC
PRES
PR
PB
PERTES
STATOR
ROTOR PMEC
PRES
PR
PB
PERTES
PMEC
PRES
PR
PB
PERTES
STATOR
ROTOR
STATOR
ROTOR PMEC
PRES
PR
PB
PERTES
FONCTIONNEMENT MOTEUR
HYPERSYNCHRONISME.
FONCTIONNEMENT MOTEUR
HYPOSYNCHRONISME.
FONCTIONNEMENT GENERATRICE
HYPERSYNCHRONISME.
FONCTIONNEMENT GENERATRICE
HYPOSYNCHRONISME.
PRES > 0
1 2
3 4
PRES <0
g> 0 g < 0
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
26
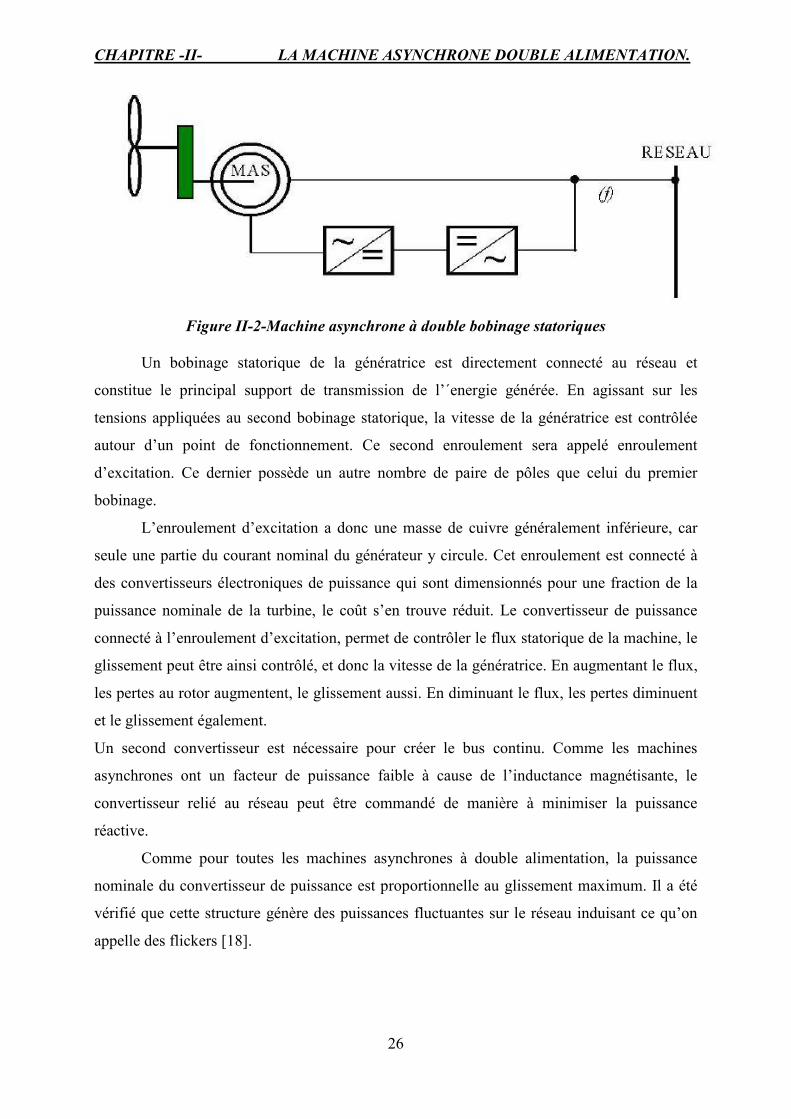
Figure II-2-Machine asynchrone à double bobinage statoriques
Un bobinage statorique de la génératrice est directement connecté au réseau et
constitue le principal support de transmission de l’´energie générée. En agissant sur les
tensions appliquées au second bobinage statorique, la vitesse de la génératrice est contrôlée
autour d’un point de fonctionnement. Ce second enroulement sera appelé enroulement
d’excitation. Ce dernier possède un autre nombre de paire de pôles que celui du premier
bobinage.
L’enroulement d’excitation a donc une masse de cuivre généralement inférieure, car
seule une partie du courant nominal du générateur y circule. Cet enroulement est connecté à
des convertisseurs électroniques de puissance qui sont dimensionnés pour une fraction de la
puissance nominale de la turbine, le coût s’en trouve réduit. Le convertisseur de puissance
connecté à l’enroulement d’excitation, permet de contrôler le flux statorique de la machine, le
glissement peut être ainsi contrôlé, et donc la vitesse de la génératrice. En augmentant le flux,
les pertes au rotor augmentent, le glissement aussi. En diminuant le flux, les pertes diminuent
et le glissement également.
Un second convertisseur est nécessaire pour créer le bus continu. Comme les machines
asynchrones ont un facteur de puissance faible à cause de l’inductance magnétisante, le
convertisseur relié au réseau peut être commandé de manière à minimiser la puissance
réactive.
Comme pour toutes les machines asynchrones à double alimentation, la puissance
nominale du convertisseur de puissance est proportionnelle au glissement maximum. Il a été
vérifié que cette structure génère des puissances fluctuantes sur le réseau induisant ce qu’on
appelle des flickers [18].
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
27
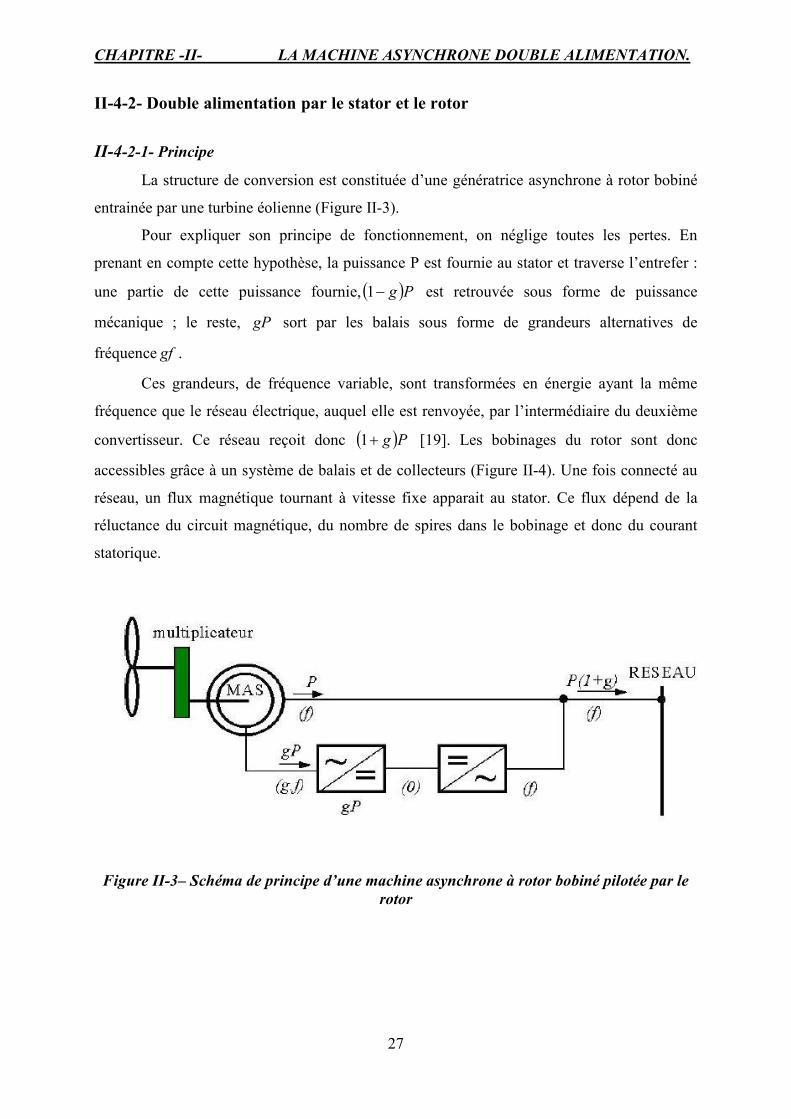
II-4-2- Double alimentation par le stator et le rotor
II-4-2-1- Principe
La structure de conversion est constituée d’une génératrice asynchrone à rotor bobiné
entrainée par une turbine éolienne (Figure II-3).
Pour expliquer son principe de fonctionnement, on néglige toutes les pertes. En
prenant en compte cette hypothèse, la puissance P est fournie au stator et traverse l’entrefer :
une partie de cette puissance fournie, ( )Pg−1 est retrouvée sous forme de puissance
mécanique ; le reste, gP sort par les balais sous forme de grandeurs alternatives de
fréquence gf .
Ces grandeurs, de fréquence variable, sont transformées en énergie ayant la même
fréquence que le réseau électrique, auquel elle est renvoyée, par l’intermédiaire du deuxième
convertisseur. Ce réseau reçoit donc ( )Pg+1 [19]. Les bobinages du rotor sont donc
accessibles grâce à un système de balais et de collecteurs (Figure II-4). Une fois connecté au
réseau, un flux magnétique tournant à vitesse fixe apparait au stator. Ce flux dépend de la
réluctance du circuit magnétique, du nombre de spires dans le bobinage et donc du courant
statorique.
Figure II-3– Schéma de principe d’une machine asynchrone à rotor bobiné pilotée par le
rotor
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
28
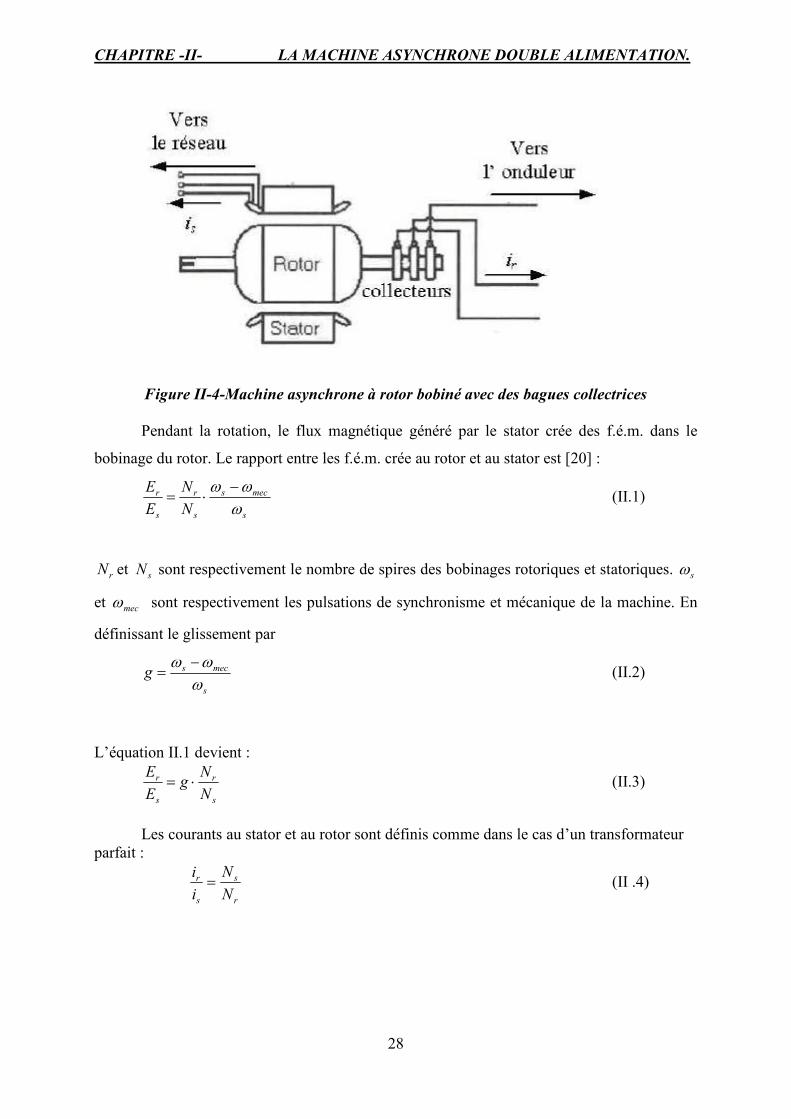
Figure II-4-Machine asynchrone à rotor bobiné avec des bagues collectrices
Pendant la rotation, le flux magnétique généré par le stator crée des f.é.m. dans le
bobinage du rotor. Le rapport entre les f.é.m. crée au rotor et au stator est [20] :
s
mecs
s
r
s
r
N
N
E
E
ω
ωω −⋅= (II.1)
rN et sN sont respectivement le nombre de spires des bobinages rotoriques et statoriques. sω
et mecω sont respectivement les pulsations de synchronisme et mécanique de la machine. En
définissant le glissement par
s
mecsgω
ωω −= (II.2)
L’équation II.1 devient :
s
r
s
r
N
Ng
E
E⋅= (II.3)
Les courants au stator et au rotor sont définis comme dans le cas d’un transformateur
parfait :
r
s
s
r
N
N
i
i= (II .4)
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
29
Donc, le rapport entre la puissance Sr au rotor et la puissance Ss au stator devient :
gE
E
i
i
S
S
s
r
s
r
s
r == (II.5)
Cette équation montre que pour une puissance constante transmise au stator, plus on
transmet de la puissance par le rotor et, plus on augmente le glissement. La pulsation au stator
(imposée par le réseau) étant supposée constante, il est donc possible de contrôler la vitesse de
la génératrice (équation II.2) en agissant simplement sur la puissance transmise au rotor via le
glissement g .
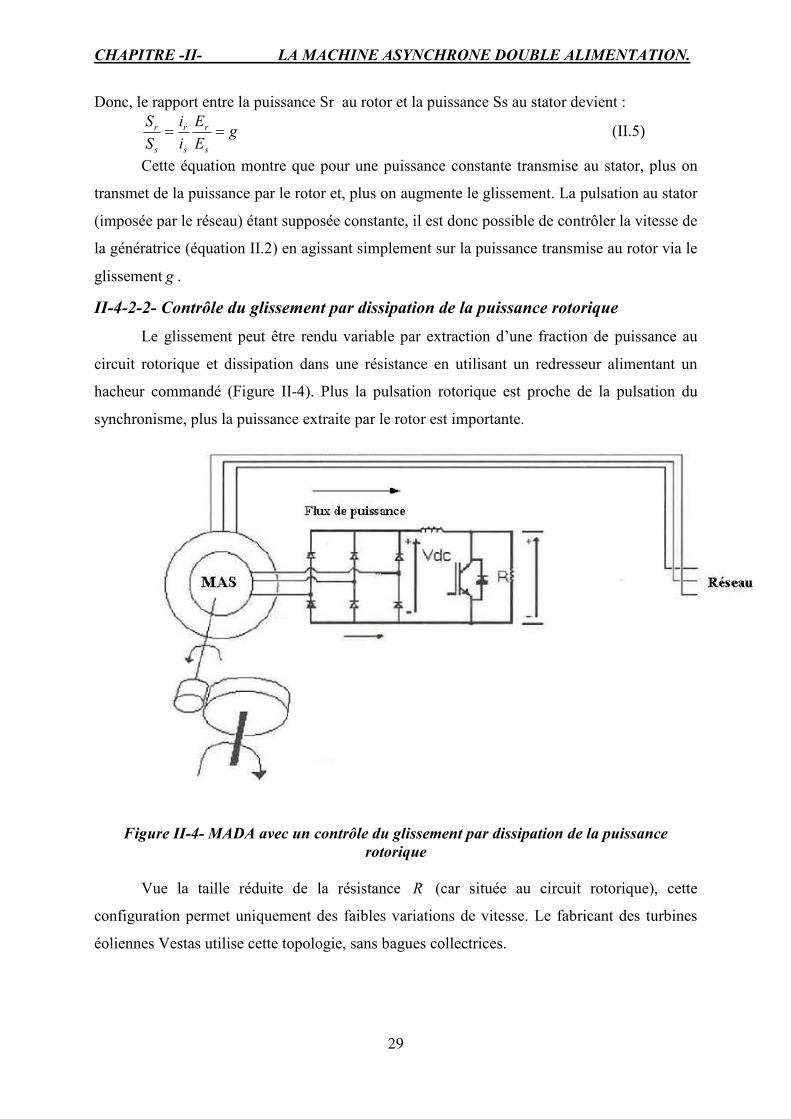
II-4-2-2- Contrôle du glissement par dissipation de la puissance rotorique
Le glissement peut être rendu variable par extraction d’une fraction de puissance au
circuit rotorique et dissipation dans une résistance en utilisant un redresseur alimentant un
hacheur commandé (Figure II-4). Plus la pulsation rotorique est proche de la pulsation du
synchronisme, plus la puissance extraite par le rotor est importante.
Figure II-4- MADA avec un contrôle du glissement par dissipation de la puissance
rotorique
Vue la taille réduite de la résistance R (car située au circuit rotorique), cette
configuration permet uniquement des faibles variations de vitesse. Le fabricant des turbines
éoliennes Vestas utilise cette topologie, sans bagues collectrices.
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
30
Le convertisseur de puissance et la charge résistive sont assemblés sur le rotor et
tournent avec lui. Le signal de commande du hacheur est transmis via un signal optique. Le
glissement maximum obtenu avec ce système Vestas appelé ” opti-slip ” est de 10% [21].
L’inconvénient de ce principe est que la puissance dissipée dans la résistance diminue
le rendement du système de conversion.
II-4-2-3- Transfert de la puissance rotorique sur le réseau
a – Principe
Au lieu de dissiper la puissance disponible au rotor par effet Joule, on peut récupérer
cette puissance en la renvoyant sur le réseau électrique. Ceci améliore le rendement du
système. Dans le passé, on utilisait à cet effet des machines tournantes à courant continu ou
alternatif (montages Kramer,Sherbius, Rimcoy, etc). De nos jours, on utilise, pour cette
récupération, un système statique de conversion d’´energie constitué de convertisseurs de
puissance ainsi qu’un transformateur.
Le convertisseur est dimensionné pour transiter seulement la puissance rotorique, (soit
environ 25% de la puissance nominale) pour obtenir un glissement maximal et donc la
puissance statorique nominale.
C’est un compromis qui mène à une meilleure capture de l’´energie éolienne et à une
faible fluctuation de la puissance du coté du réseau.
Il faut noter que tous les éléments du circuit de récupération (courants du circuit
rotorique) ne sont dimensionnés que pour gP , donc, pour une puissance d’autant plus faible
que le glissement maximum désiré est plus faible. Ce procédé est intéressant quand on peut se
contenter d’une variation de vitesse réduite.
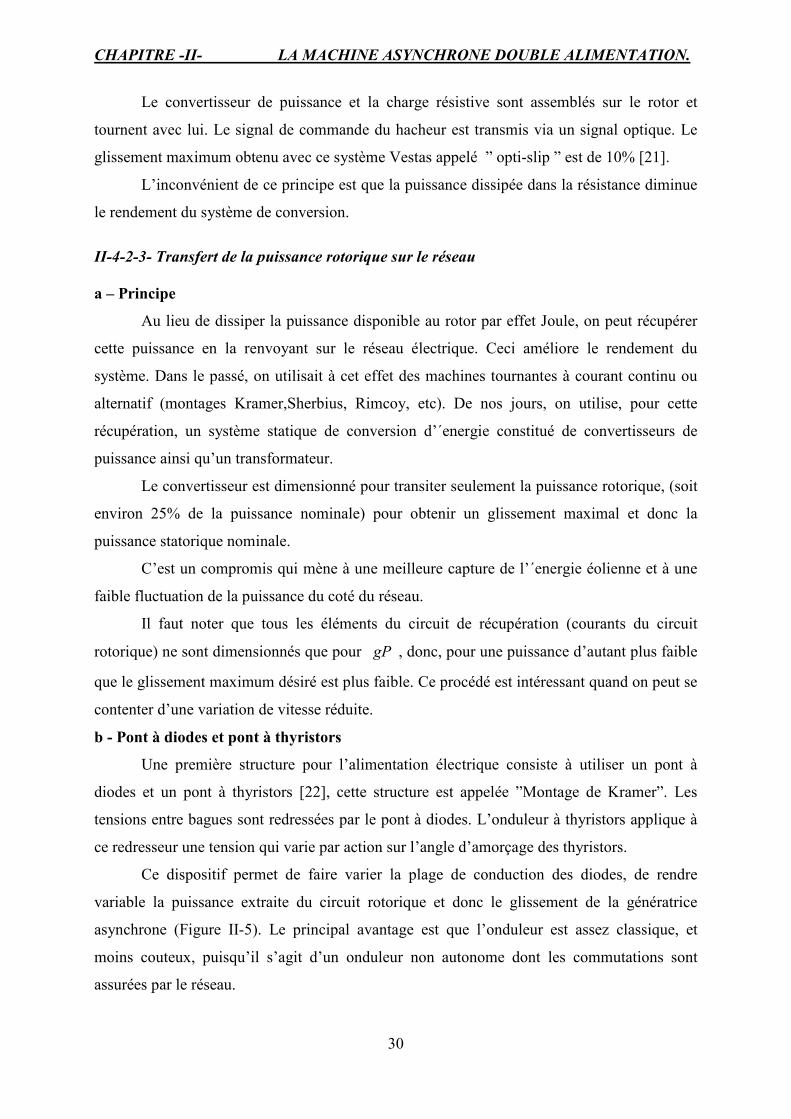
b - Pont à diodes et pont à thyristors
Une première structure pour l’alimentation électrique consiste à utiliser un pont à
diodes et un pont à thyristors [22], cette structure est appelée ”Montage de Kramer”. Les
tensions entre bagues sont redressées par le pont à diodes. L’onduleur à thyristors applique à
ce redresseur une tension qui varie par action sur l’angle d’amorçage des thyristors.
Ce dispositif permet de faire varier la plage de conduction des diodes, de rendre
variable la puissance extraite du circuit rotorique et donc le glissement de la génératrice
asynchrone (Figure II-5). Le principal avantage est que l’onduleur est assez classique, et
moins couteux, puisqu’il s’agit d’un onduleur non autonome dont les commutations sont
assurées par le réseau.
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
31
Figure II-5-MADA alimentée par un pont à diodes et thyristors
L’inconvénient de cette structure d’alimentation c’est qu’elle ne permet pas
l’asservissement électrique de la vitesse de la machine. De plus, l’onduleur triphasé utilisé
pour cette structure injecte des courants harmoniques basses fréquences d’amplitude
importante. Cette injection d’harmoniques multiples de 50Hz est préjudiciable pour la durée
de vie des appareillages électriques raccordés sur le réseau. Pour éviter cet inconvénient, on
utilise d’autres structures.
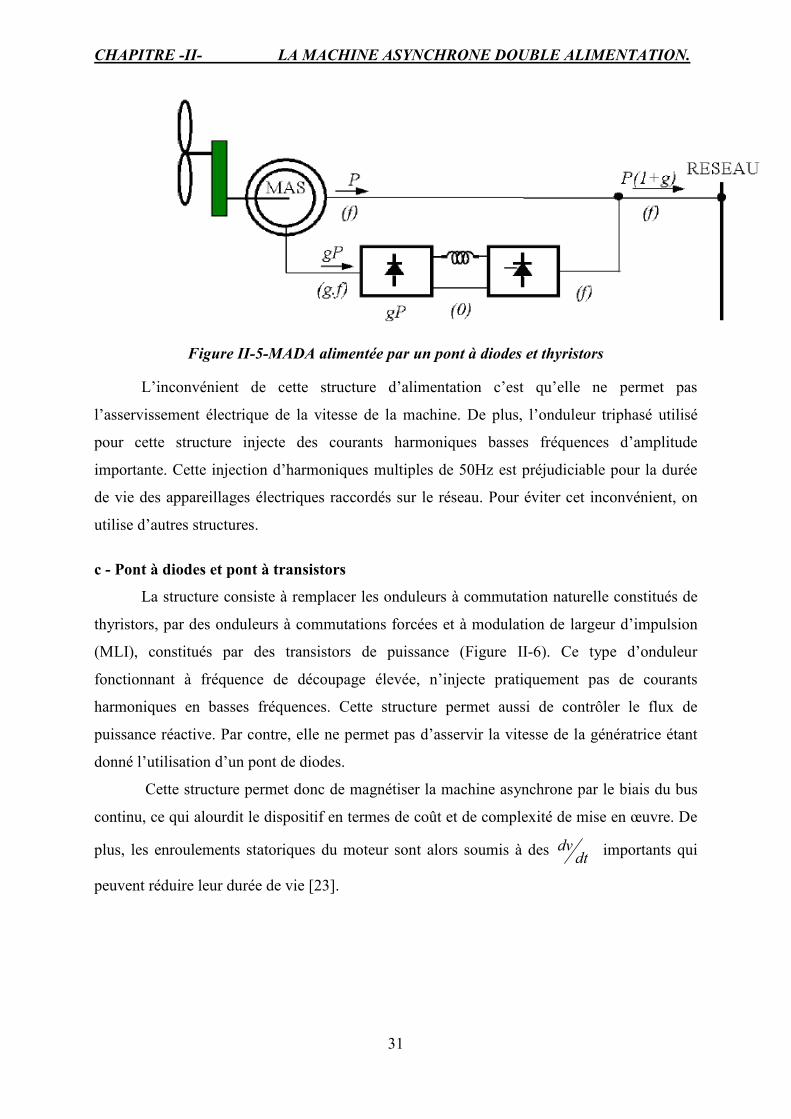
c - Pont à diodes et pont à transistors
La structure consiste à remplacer les onduleurs à commutation naturelle constitués de
thyristors, par des onduleurs à commutations forcées et à modulation de largeur d’impulsion
(MLI), constitués par des transistors de puissance (Figure II-6). Ce type d’onduleur
fonctionnant à fréquence de découpage élevée, n’injecte pratiquement pas de courants
harmoniques en basses fréquences. Cette structure permet aussi de contrôler le flux de
puissance réactive. Par contre, elle ne permet pas d’asservir la vitesse de la génératrice étant
donné l’utilisation d’un pont de diodes.
Cette structure permet donc de magnétiser la machine asynchrone par le biais du bus
continu, ce qui alourdit le dispositif en termes de coût et de complexité de mise en œuvre. De
plus, les enroulements statoriques du moteur sont alors soumis à des dt
dv importants qui
peuvent réduire leur durée de vie [23].
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
32
Figure II-6-MADA alimentée par un pont à diodes et un onduleur MLI
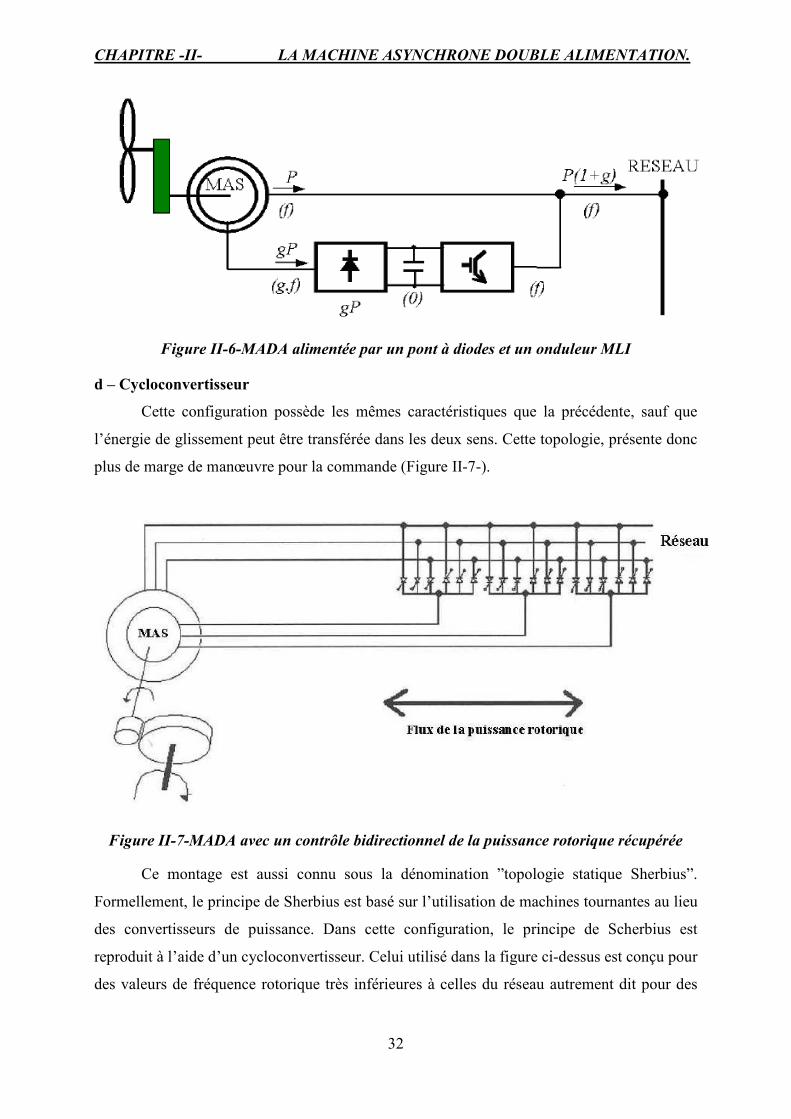
d – Cycloconvertisseur
Cette configuration possède les mêmes caractéristiques que la précédente, sauf que
l’énergie de glissement peut être transférée dans les deux sens. Cette topologie, présente donc
plus de marge de manœuvre pour la commande (Figure II-7-).
Figure II-7-MADA avec un contrôle bidirectionnel de la puissance rotorique récupérée
Ce montage est aussi connu sous la dénomination ”topologie statique Sherbius”.
Formellement, le principe de Sherbius est basé sur l’utilisation de machines tournantes au lieu
des convertisseurs de puissance. Dans cette configuration, le principe de Scherbius est
reproduit à l’aide d’un cycloconvertisseur. Celui utilisé dans la figure ci-dessus est conçu pour
des valeurs de fréquence rotorique très inférieures à celles du réseau autrement dit pour des
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
33
glissements très faibles. Ainsi, ceci permet l’utilisation de thyristors qui sont intéressants du
point de vue coût.
Comme le flux de la puissance est bidirectionnel, il est possible d’augmenter ou de
diminuer l’énergie de glissement et ainsi faire fonctionner la machine en génératrice ou en
moteur.
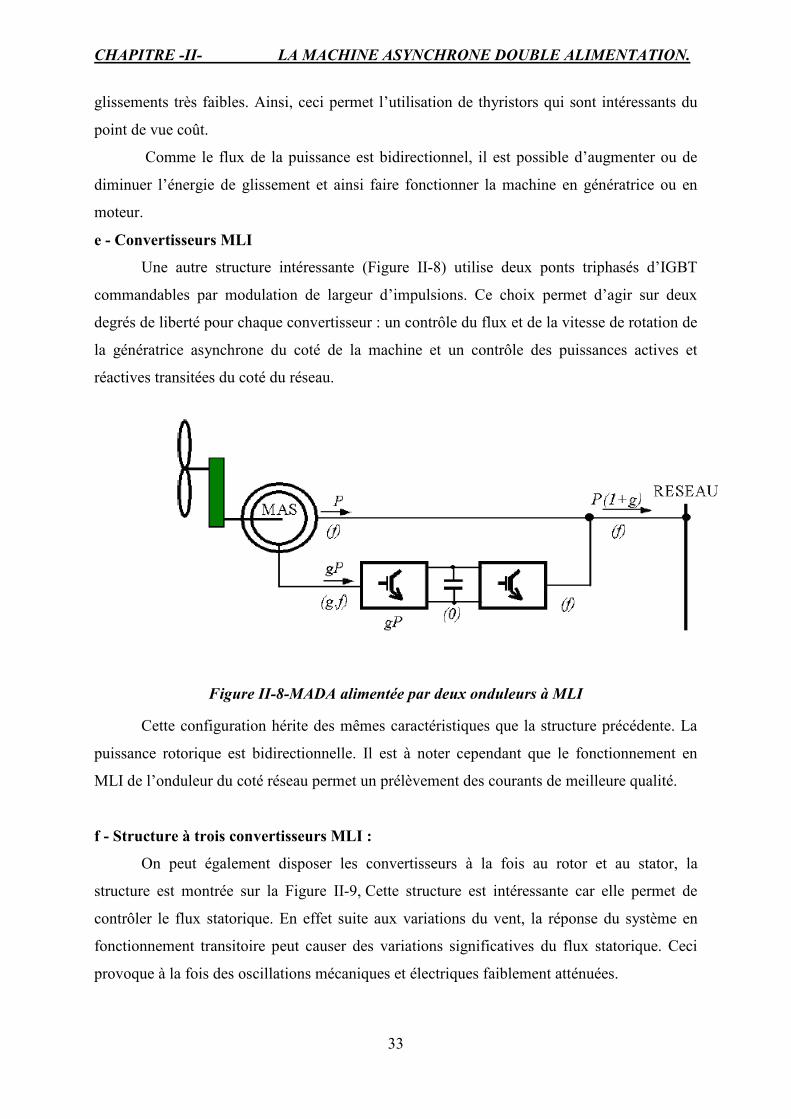
e - Convertisseurs MLI
Une autre structure intéressante (Figure II-8) utilise deux ponts triphasés d’IGBT
commandables par modulation de largeur d’impulsions. Ce choix permet d’agir sur deux
degrés de liberté pour chaque convertisseur : un contrôle du flux et de la vitesse de rotation de
la génératrice asynchrone du coté de la machine et un contrôle des puissances actives et
réactives transitées du coté du réseau.
Figure II-8-MADA alimentée par deux onduleurs à MLI
Cette configuration hérite des mêmes caractéristiques que la structure précédente. La
puissance rotorique est bidirectionnelle. Il est à noter cependant que le fonctionnement en
MLI de l’onduleur du coté réseau permet un prélèvement des courants de meilleure qualité.
f - Structure à trois convertisseurs MLI :
On peut également disposer les convertisseurs à la fois au rotor et au stator, la
structure est montrée sur la Figure II-9, Cette structure est intéressante car elle permet de
contrôler le flux statorique. En effet suite aux variations du vent, la réponse du système en
fonctionnement transitoire peut causer des variations significatives du flux statorique. Ceci
provoque à la fois des oscillations mécaniques et électriques faiblement atténuées.
CHAPITRE -II- LA MACHINE ASYNCHRONE DOUBLE ALIMENTATION.
34
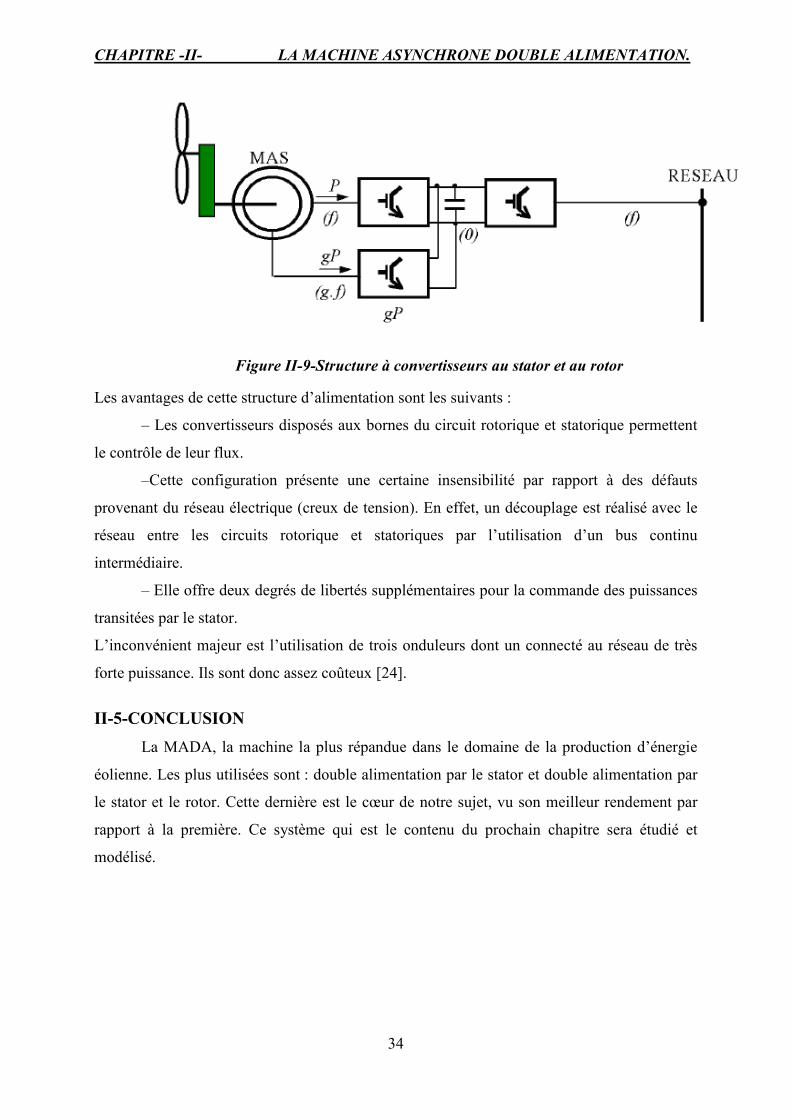
Figure II-9-Structure à convertisseurs au stator et au rotor
Les avantages de cette structure d’alimentation sont les suivants :
– Les convertisseurs disposés aux bornes du circuit rotorique et statorique permettent
le contrôle de leur flux.
–Cette configuration présente une certaine insensibilité par rapport à des défauts
provenant du réseau électrique (creux de tension). En effet, un découplage est réalisé avec le
réseau entre les circuits rotorique et statoriques par l’utilisation d’un bus continu
intermédiaire.
– Elle offre deux degrés de libertés supplémentaires pour la commande des puissances
transitées par le stator.
L’inconvénient majeur est l’utilisation de trois onduleurs dont un connecté au réseau de très
forte puissance. Ils sont donc assez coûteux [24].
II-5-CONCLUSION
La MADA, la machine la plus répandue dans le domaine de la production d’énergie
éolienne. Les plus utilisées sont : double alimentation par le stator et double alimentation par
le stator et le rotor. Cette dernière est le cœur de notre sujet, vu son meilleur rendement par
rapport à la première. Ce système qui est le contenu du prochain chapitre sera étudié et
modélisé.
CHAPITRE III
MODELISATION ET COMMANDE DE
LA MADA

Chapitre III MODELISATION ET COMMANDE DE LA MADA
36
III CHAPITRE III : MODELISATION DE LA MACHINE ASYNCHRONE DOUBLE
III.1. INTRODUCTION
Un intérêt sans cesse croissant est de plus en plus accordé à la machine asynchrone au
détriment des autres machines. En effet, cette machine est devenue le choix par excellence de
la majorité des industriels, grâce à son prix et sa robustesse. Cependant, elle a une dynamique
très complexe à cause des interactions stator rotor, ce qui rend la modélisation basée sur
l’élaboration de schémas équivalents dérivés de la théorie du champ tournant insuffisante
pour décrire son comportement dynamique. De nouvelles méthodes tel que la méthode du
vecteur spiral et la modélisation dans le repère de Park sont développées et devenus la base
pour la modélisation, la simulation et la commande des machines à induction.
Dans le présent chapitre nous nous intéresserons à la modélisation dynamique de la
machine asynchrone en double alimentation ainsi que son contrôle des puissances actives et
reactives .
III.2. MODELISATION DE LA MADA EN GRANDEURS DE PHASES
La machine asynchrone étant un système non linéaire très complexe, sa modélisation
nécessite l’introduction de certaines hypothèses simplificatrices sans trop exagérer pour avoir
un modèle le plus proche possible de la réalité.
III.2.1. Hypothèses simplificatrices
La modélisation de la machine asynchrone sera établie sous les hypothèses
simplificatrices suivantes : [25].
- L’entrefer est supposé d’épaisseur uniforme et l’effet d’encoches négligeable.
- La saturation magnétique, l’hystérésis et les courants de Foucault sont négligeables.
- Les résistances des enroulements sont constantes et l’effet de peau négligeable.
- On admet que la f.m.m créée par chacune des phases des deux armatures est à
répartition sinusoïdale.
- La machine est symétrique, par conséquent, la somme des courant et des tensions est
égale a zéro.
Parmi les conséquences importantes de ces hypothèses on peut citer :
- L’additive des flux,
- La constance des inductances propres,
Chapitre III MODELISATION ET COMMANDE DE LA MADA
37
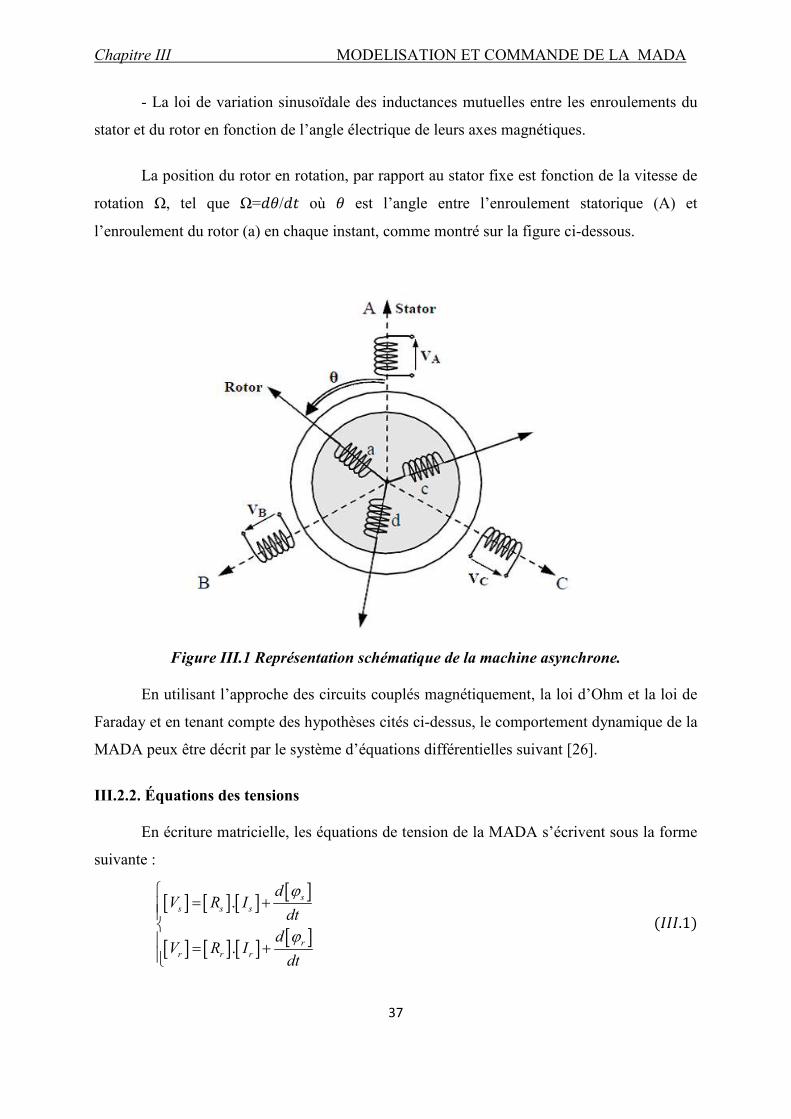
- La loi de variation sinusoïdale des inductances mutuelles entre les enroulements du
stator et du rotor en fonction de l’angle électrique de leurs axes magnétiques.
La position du rotor en rotation, par rapport au stator fixe est fonction de la vitesse de
rotation Ω, tel que Ω=/ où est l’angle entre l’enroulement statorique (A) et
l’enroulement du rotor (a) en chaque instant, comme montré sur la figure ci-dessous.
Figure III.1 Représentation schématique de la machine asynchrone.
En utilisant l’approche des circuits couplés magnétiquement, la loi d’Ohm et la loi de
Faraday et en tenant compte des hypothèses cités ci-dessus, le comportement dynamique de la
MADA peux être décrit par le système d’équations différentielles suivant [26].
III.2.2. Équations des tensions
En écriture matricielle, les équations de tension de la MADA s’écrivent sous la forme
suivante :
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ]
.
.
s
s s s
r
r r r
dV R I
dt
dV R I
dt
ϕ
ϕ
= +
= +
(.1)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
38
, : Les tensions simples statorique et rotorique.
, : Les courants de phase statorique rotorique.
, : Les flux statorique et rotorique respectivement.
, : Les résistances par phase statorique et rotorique.
Les équations de tensions du stator sont écrites dans un repère lié au stator et les
équations du rotor dans un repère lié au rotor, ce qui explique l’absence des tensions induites
dues au mouvement [27].
III.2.3. Equations des flux
De la même manière on peut écrire les équations des flux sous la forme suivante :
[ ] [ ] [ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
. .
. .
s s s s sr r
r r r r r s s
L I M I
L I M I
ϕ
ϕ
= +
= + (.2)
En appliquant la transformée de Laplace, et en remplaçant (III.2) dans (III.1), on
obtient le système d’équations ci-dessous, qui représente le modèle de la machine asynchrone
dans le repère naturel :
[ ] [ ] [ ] [ ] [ ] [ ] [ ]( )
[ ] [ ] [ ] [ ] [ ] [ ] [ ]( )
. . .
. . .
s s s ss s sr r
r r r r r r r s s
dV R I L I M I
dt
dV R I L I M I
dt
= + + = + +
(.3)
Avec :
[ ]as
s bs
cs
v
V v
v
=
, [ ]as
s bs
cs
i
I i
i
=
, [ ]as
s bs
cs
ϕ
ϕ ϕ
ϕ
=
[ ]ar
r br
cr
v
V v
v
=
, [ ]ar
r br
cr
i
I i
i
=
, [ ]ar
r br
cr
ϕ
ϕ ϕ
ϕ
=
[ ]= [ ] , [ ] =[ ]

Chapitre III MODELISATION ET COMMANDE DE LA MADA
39
[ ]s s s
ss s s s
s s s
L M M
L M L M
M M L
=
, [ ]r r r
r r r r r
r r r
L M M
L M L M
M M L
=
[ ] [ ]( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
max
cos cos 2 / 3 cos 4 / 3
cos 2 / 3 cos cos 4 / 3
cos 4 / 3 cos 2 / 3 cos
t
sr rsM M M
θ θ π θ πθ π θ θ πθ π θ π θ
− −
= = − − − −
, : Les inductances propres statorique et rotorique.
, M : Les mutuelles entre les bobines statoriques respectivement rotoriques.
III.2.4. Equation mécanique
L’expression générale du couple électromagnétique est donnée par :
( )1. . .
2
t
s s
e
r r
I Idp LI Idt
θ Γ =
(.4)
Sachant que les matrices inductances [] et [ ] sont à termes constante,
l’expression du couple devient comme suit.
[ ]1. . .
2
t
s s
e sr
r r
I Idp MI Idt
Γ =
(III.5)
D’autre part nous avons l’équation du mouvement qui est donnée par :
.g e r g
dJ fdt
Ω = Γ −Γ − Ω (.6)
Les systèmes d’équations différentielles (III.3), (III.5) et (III.6) représente le modèle
de la MADA dans le repère naturel. Les équations différentielles de ce système sont fortement
couplées l’une à l’autre par la mutuelle inductance entre les bobines. Plus particulièrement, la
mutuelle inductance entre les bobines statoriques et rotoriques qui est fonction de la position
du rotor θ. Ce couplage rend la résolution de ce système très complexe.
Les transformations mathématiques comme la transformation de Park (d, q) ou la
transformation (α, β) peuvent faciliter la résolution d’un tel système en transformant ces

Chapitre III MODELISATION ET COMMANDE DE LA MADA
40
équations différentielles à paramètres variable dans le temps en équations différentielles à
paramètres constantes écrites dans un repère à axes orthogonaux. [27]
III.3. MODELISATION DE LA MADA DANS UN REPERE ORTHOGONAL
III.3.1. La transformation de Park
La transformation de Park est un outil mathématique permettant la simplification des
équations des machines électriques triphasées. Elle permet de passer d’un système triphasé
alternatif à un système diphasé (repère d, q, o), et donc d’obtenir un système d’équation à
coefficients constants ce qui simplifie sa résolution.
La matrice de transformation est définie comme suit :
( )
2 4cos( ) cos( ) cos( )
3 3
2 2 4sin( ) sin( ) sin( )
3 3 3
2 2 2
2 2 2
P
π πθ θ θ
π πθ θ θ θ
− −
= − − − − −
[( )] Est Orthonormée ce qui permet la conservation des puissances lors du
passage du système triphasé au système biphasé, et inversement.
: L’angle entre le repère du système triphasé à transformer et le repère de Park.
III.3.1.1. Transformation des variables statoriques
La transformation des variables réelles statorique de la machine consiste à appliquer la
matrice de Park [( )]aux vecteurs des variables tensions [ ]sV , courant [ ]sI et flux [ ]sϕ
pour obtenir leurs composantes relatives correspondantes dqosV , dqosI ,et dqosϕ
respectivement suivant les équations :
( ) [ ] [ ] [ ] 1. ( ) .dqo s s s s dqor s
V P V V P Vθ θ−
= ⇒ = (III.7)
( ) [ ] [ ]1
). ( .dqo s s s s dqos sI P I I P Iθ θ
− = ⇒ = (III.8)
( ) [ ] [ ] [ ] 1. ( ) .dqo s s s s dqos s
P Pϕ θ ϕ ϕ θ ϕ−
= ⇒ = (III.9)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
41
Figure III.2 Transformation des variables statoriques.
( )sP θ est la matrice de la transformation de Park appliquée au stator de la machine.
sθ étant l’abscisse angulaire du référentiel (d,q) tournant à la vitesse sω par rapport à l’axe de
la phase statorique (A). sθ est donnée par la relation suivante : [28]
0
( ) ( ) (0)
t
s s st t dtθ ω θ= +∫ (.10)
( )0sθ Est l’abscisse initiale du référentiel arbitraire par rapport à la phase (a) du stator.
III.3.1.2. Transformation des variables rotoriques
De la même manière que pour le stator, les composantes relatives correspondantes aux
variables rotoriques peuvent être calculées à partir des équations suivantes :
( ) [ ] [ ] [ ] 1. ( ) .dqo r r r r dqor r
V P V V P Vθ θ−
= ⇒ = (III.11)
( ) [ ] [ ] [ ] 1. ( ) .dqor r r r r dqorI P I I P Iθ θ
− = ⇒ = (III.12)
( ) [ ] [ ] [ ] 1. ( ) .dqor r r r r dqorP Pϕ θ ϕ ϕ θ ϕ
− = ⇒ = (III.13)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
42
Figure III.3 Transformation des variables rotoriques.
( )rP θ Est la matrice de la transformation de Park appliquée au rotor de la machine.
rθ Est l’abscisse du référentiel orthogonal par rapport à la phase rotorique (ar) tel que : [28]
( ) ( ) ( )0
0
t
r rt t dtθ ω θ= +∫ (III.14)
( )0rθ Est la position initiale du référentiel par rapport à la phase rotorique (a).
III.3.2. Equation de la MADA dans le repère arbitraire
Il parait clairement que le repère de la transformation de Park des grandeurs
statoriques et celui des grandeurs rotoriques doivent coïncider pour simplifier les équations.
Ceci se fait en liant les angles sθ et rθ par la relation suivante :
sθ = rθ +θ (.15)
Cette relation est dite condition de simplification de Park.

Chapitre III MODELISATION ET COMMANDE DE LA MADA
43
Figure III.4 La MADA dans le référentiel arbitraire.
III.3.2.1. Equations des tensions :
En introduisant les équations (III.7), (III.8), (III.11) et (III.12) dans les équations de la
machine, on obtient :
( ) [ ] [ ] [ ]( )( ) [ ] [ ] [ ]( )
1 1 1
1 1 1
. . ( ) . ( ) .
. . ( ) . ( ) .
s dqo s s dqo s dqos s s
s dqo r s dqo s dqor r r
dP V R p I P
dt
dP V R p I P
dt
θ θ θ ϕ
θ θ θ θ θ θ ϕ
− − −
− − −
= + − = − + −
(III.16)
D’où :
[ ] [ ] [ ]
[ ] [ ] [ ]
1
1
. ( ) . ( ) .
. ( ) . ( ) .
dqo s dqo s s dqos s s
dqo r dqo s s dqor r r
dV R I P P
dt
dV R I P P
dt
θ θ ϕ
θ θ θ θ ϕ
−
−
= + = + − −
(.17)
Sachant que :
[ ] [ ]
[ ] [ ] ( )
1
1
0 1 0
( ) . ( ) . 1 0 0
0 0 0
0 1 0
( ) . ( ) . 1 0 0
0 0 0
ss s
s
s s
ddp p
dt dt
ddp p
dt dt
θθ θ
θ θθ θ θ θ
−
−
− =
− − − − =

Chapitre III MODELISATION ET COMMANDE DE LA MADA
44
On peut écrire :
( )
( )
.
.
.
.
ds s ds ds s qs
qs s qs qs s ds
dr r dr dr s qr
qr r qr qr s dr
dV R I
dt
dV R I
dt
dV R I
dt
dV R I
dt
ϕ ω ϕ
ϕ ω ϕ
ϕ ω − ω ϕ
ϕ ω − ω ϕ
= + − = + + = + − = + +
(.18)
dsV , qsV , drV , qrV : Les tensions directe et en quadrature statoriques, respectivement rotoriques.
dsI , qsI , drI , qrI : Les courants directe et en quadrature statoriques, respectivement rotoriques.
dsϕ , qsϕ , drϕ , qrϕ : Les flux direct et en quadrature statoriques, respectivement rotoriques.
sω , rω , ω : La pulsation statorique, rotorique et mécanique respectivement.
III.3.2.2. Equations des flux :
De la même manière on peut trouver les équations de flux qui sont donner par :
. .
. .
. .
. .
ds s ds dr
qs s qs qr
dr r dr ds
qr r qr qs
L I M I
L I M I
L I M I
L I M I
ϕ
ϕ
ϕ
ϕ
= + = +
= + = +
(.19)
En substituant les flux dans le système d’équations (III.18) par leurs expressions, le
système d’équations des tensions de la machine peut être écrit sous la forme matricielle
suivante :
( ) ( )
( ) ( )
0 0 0
0 0 0
0 0 0
0 0 0
ds ds dss s s s s
qs qs qss s s s s
s r s r rdr dr dr
s s r r rqr qr qr
V I IR L M L M
V I IL R M L Md
M R L M LV I Idt
M L R M LV I I
ω ωω ω
ω ω ω ωω ω ω ω
− − = + − − − − − −
(.20)
Ou encore :
. .d
V G I L Idt
= + (.21)
Qui devient sous forme d’équation d’état :
[ ]1 .I L V G I−= − (.22)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
45
Où :
ds
qs
dr
qr
V
VV
V
V
=
ds
qs
dr
qr
I
II
I
I
=
( ) ( )( ) ( )
0
0
0
0
s s s
s s s s
s r s
s s
R L M
L R MG
M R Lr
M Lr Rr
ω ωω ω
ω ω ω ωω ω ω ω
− − = − − − − − −
0 0
0 0
0 0
0 0
s
s
r
r
L M
L ML
M L
M L
=
; 3
2srM M=
III.3.2.3. Equation du couple électromagnétique
Etant donner que la matrice de transformation que nous avons utilisée conserve la
puissance instantanée, nous pouvons écrire alors :
( ) ( ) ( ) ( ). . . . . . . . . .e sa sa sb sb sc sc ra ra rb rb rc rc ds ds qs qs dr dr qr qrP V I V I V I V I V I V I V I V I V I V I= + + + + + = + + + (.23)
En remplaçant les tensions par leurs expressions, on trouve :
( ) . . . .e s ds qs qs ds s dr qr qr drP I I I Iω ϕ ϕ ω ω ϕ ϕ= − + − −
En exprimant les flux par leur expression à partir du système (III.19), on constate que :
. . . .ds qs qs ds dr qr qr drI I I Iϕ ϕ ϕ ϕ− = −
D’autre part on a :
%&=&/(
D’où :
.( . . ) . .( . . )ds qs qs ds dr qs qr dse p I I p M I I I Iϕ ϕΓ = − = − (.24)
= . ( . . )dr qs qr ds
Mp I ILr
ϕ ϕ−

Chapitre III MODELISATION ET COMMANDE DE LA MADA
46
Tel que : ) est le nombre de paire de pôles de la machine.
III.3.3. Le choix du référentiel
Le système d’équation (III.22) représente le modèle linéaire de la machine asynchrone
double alimentation dans un repère arbitraire tournant à une vitesse quelconque *. Le choix
d’un référentiel dépend essentiellement du but de la modélisation et de la compatibilité avec
les autres composantes du système étudié. [26]
III.3.3.1. Référentiel lié au stator
Ce référentiel, appelé souvent stationnaire, est caractérisé par la relation suivante :
0s rd d d
dt dt dt
θ θ θω= ⇒ = − = −
0 0 0 0 0
0 0 0 0 0
0 0 0
0 0 0
ds ds dss s
qs qs qss s
r r rdr dr dr
r r rqr qr qr
V I IR L M
V I IR L Md
M R L M LV I Idt
M L R M LV I I
ω ωω ω
= +
− −
(.25)
Les composantes relatives de la machine dans ce référentiel ont les mêmes
caractéristiques que celles du réseau d’alimentation, ce qui convient pour l’étude de la
machines dans un réseau complexe. Il est aussi souvent utilisé pour l’étude des variations
importantes de la vitesse de rotation. [26]
III.3.3.2. Référentiel lié au rotor
Ce référentiel est intéressant pour les problèmes des régimes transitoires où la vitesse
de rotation est considérée comme constante. Il est caractérisé par la relation suivante :
0 srdd d
dt dt dt
θθ θω= ⇒ = =
0 0 0
0 0 0
0 0 0
0 0 0
ds ds dss s s s s
qs qs qss s s s s
r r rdr dr dr
r r rqr qr qr
V I IR L M L M
V I IL R M L Md
M R L M LV I Idt
M L R M LV I I
ω ωω ω
− − = + − −
(.26)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
47
III.3.3.3. Référentiel lié au champ tournant
Ce référentiel n’importe aucune simplification aux équations de la machine, il est
caractérisé par la relation :
ss
d
dt
θω= , r
s s
dg
dt
θω ω ω= − =
Tel que : est la vitesse de glissement.
0 0 0
0 0 0
0 0 0
0 0 0
ds ds dss s s s s
qs qs qss s s s s
s r s r rdr dr dr
s s r r rqr qr qr
V I IR L M L M
V I IL R M L Md
g M R g L M LV I Idt
g M g L R M LV I I
ω ωω ω
ω ωω ω
− − = + − −
(.27)
Les composantes relatives de la machine dans ce référentiel sont constantes ce qui
justifie son large utilisation dans le domaine de la commande des machines asynchrones [26]
III.4. PRINCIPE DE LA COMMANDE VECTORIELLE
Le principe de la commande vectorielle consiste à orienter l’axe d du repère de Park
suivant l’un des flux de la machine asynchrone sϕ , rϕ ou mϕ au choix, afin d’obtenir un
découplage flux-courant et couple-courant ce qui nous permet de faire un contrôle du couple
indépendamment du flux [29].
Prenons l’une des trois expressions du couple électromagnétique trouvées dans
l’équation (III.24) , par exemple :
.( . . )e ds qs qs dsp I Iϕ ϕΓ = − (.28)
Si on suppose que le flux statorique est orienté suivant l’axe d du repère de Park,
on aura
0s ds qsϕ ϕ ϕ= ⇒ = (.29)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
48
Donc l’expression du couple électromagnétique devient [30] :
. .e ds qsp IϕΓ = (.30)
Cette expression du couple ressemble bien à l’expression du couple d’un
moteur à courant continu à excitation séparée. Sous l’hypothèse d’un flux statorique orienté,
le couple électromagnétique peut être contrôlé indépendamment du flux par action sur le
courant , ce qui est l’objectif de la commande vectorielle.
III.5. MODELE DE LA MADA A FLUX STATORIQUE ORIENTE
Dans ce qui suit nous allons supposer que l’axe d du repère de Park est orienté suivant
le flux statorique. Ce choix n’est pas au hasard mais il se justifie par le fait que la machine est
souvent couplée à un réseau puissant de tension et de fréquence constante, ce qui entraine un
flux constat au stator de la machine. [25,31]
Prenons le système d’équations différentielles (III.18), décrivant la machine
asynchrone dans un repère lié au champ tournant, et avec un flux statorique constant et
orienté, s dsϕ ϕ= et 0qsϕ = , ces équations peuvent se simplifier sous la forme suivante :
.
. .
. ( ).
. ( ).
ds s ds
qs s qs s s
drdr r dr s qr
qr
qr r qr s dr
V R I
V R I
dV R I
dt
dV R I
dt
ω ϕ
ϕω ω ϕ
ϕω ω ϕ
= = + = + − − = + + −
(.31)
Si on néglige la résistance des enroulements statoriques, hypothèse souvent
acceptée pour les machines de grande puissance utilisée pour la production d’énergie
éolienne les équations des tensions de la machine se réduisent à la forme suivante [32] :

Chapitre III MODELISATION ET COMMANDE DE LA MADA
49
0
.
. ( ).
. ( ).
ds
qs s s s
drdr r dr s qr
qr
qr r qr s dr
V
V V
dV R I
dt
dV R I
dt
ω ϕ
ϕω ω ϕ
ϕω ω ϕ
= = = = + − − = + + −
(.32)
De la même manière que pour les tensions, les équations des flux deviennent :
. .
0 . .
. .
. .
ds s s ds dr
s qs qr
dr r dr ds
qr r qr qs
L I M I
L I M I
L I M I
L I M I
ϕ ϕ
ϕ
ϕ
= = + = +
= + = +
(.33)
L’expression du couple électromagnétique devienne alors :
(.34)
: Le couple électromagnétique.
p: Le nombre de paires de pôles.
Pour pouvoir contrôler facilement la production d’énergie par la MADA, il est
pratique d’élaborer un modèle pour le contrôle indépendant des puissances active et
réactive. Un tel modèle peut être élaboré en établissant les relations qui lient les puissances
actives et réactives aux courants et tension rotoriques imposés par l’onduleur.
III.5.1. Expressions des puissances actives et réactive statoriques:
Les puissances active et réactive statorique, dans le repère orthogonal, s’écrivent :
. .
. .
s ds ds qs qs
s qs ds ds qs
P V I V I
Q V I V I
= +
= − (.35)
Sous l’hypothèse d’un flux statorique orienté, ce système d’équations peut se
simplifier sous la forme :
.
.
s s qs
s s ds
P V I
Q V I
=
= (.36)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
50
Les puissances active et réactive sont donc fonction des courants statoriques
et respectivement, sur les quels nous avons au qu’une action directe. Nous devons
donc chercher une relation entre les courants rotoriques et les courants statoriques.
A partir des expressions des flux statoriques, nous pouvons écrire :
..
.
sds dr
s s s
qs qr
s
V MI I
L L
MI I
L
ω = − = −
(.37)
En remplaçant les courants statoriques direct et quadrature par leurs expressions
dans les équations des puissances active et réactive, on trouve:
2
..
..
.
ss qr
s
s ss dr
s s s
V MP I
L
V V MQ I
L Lω
= − = −
(.38)
Il ressort de l’expression (.38) que le contrôle des puissances active et
réactive au stator est découplé. En effet, avec une inductance magnétisante constante et
un réseau électrique puissant, la puissance active sera directement proportionnelle au courant
rotorique d’axe q, et la puissance réactive proportionnelle au courant rotorique d’axe d à une
constante près2
.
s
s s
V
Lωimposée par le réseau.
III.5.2. Expressions des tensions rotoriques :
A partir du système d’équation (.35), les expressions des flux rotoriques peuvent
être écrites sous la forme suivante :
2
2
.( ).
.
( ).
sdr r dr
s s s
qr r dr
s
M VML I
L L
ML I
L
ϕω
ϕ
= − +
= −
(.39)
En introduisant ces expressions dans les équations des tensions rotoriques du
système (.32), on trouve [33] :
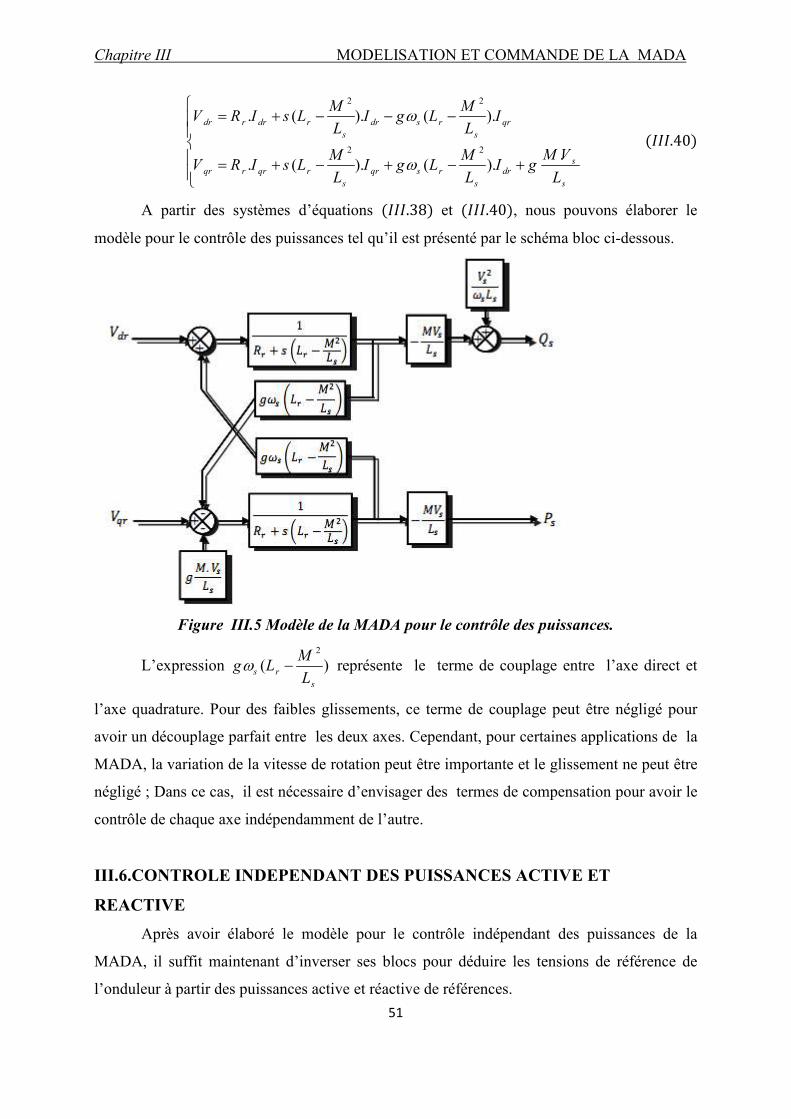
Chapitre III MODELISATION ET COMMANDE DE LA MADA
51
2 2
2 2
. ( ). ( ).
.. ( ). ( ).
dr r dr r dr s r qr
s s
sqr r qr r qr s r dr
s s s
M MV R I s L I g L I
L L
M VM MV R I s L I g L I g
L L L
ω
ω
= + − − −
= + − + − +
(.40)
A partir des systèmes d’équations (.38) et (.40), nous pouvons élaborer le
modèle pour le contrôle des puissances tel qu’il est présenté par le schéma bloc ci-dessous.
Figure III.5 Modèle de la MADA pour le contrôle des puissances.
L’expression 2
( )s r
s
Mg L
Lω − représente le terme de couplage entre l’axe direct et
l’axe quadrature. Pour des faibles glissements, ce terme de couplage peut être négligé pour
avoir un découplage parfait entre les deux axes. Cependant, pour certaines applications de la
MADA, la variation de la vitesse de rotation peut être importante et le glissement ne peut être
négligé ; Dans ce cas, il est nécessaire d’envisager des termes de compensation pour avoir le
contrôle de chaque axe indépendamment de l’autre.
III.6.CONTROLE INDEPENDANT DES PUISSANCES ACTIVE ET
REACTIVE
Après avoir élaboré le modèle pour le contrôle indépendant des puissances de la
MADA, il suffit maintenant d’inverser ses blocs pour déduire les tensions de référence de
l’onduleur à partir des puissances active et réactive de références.
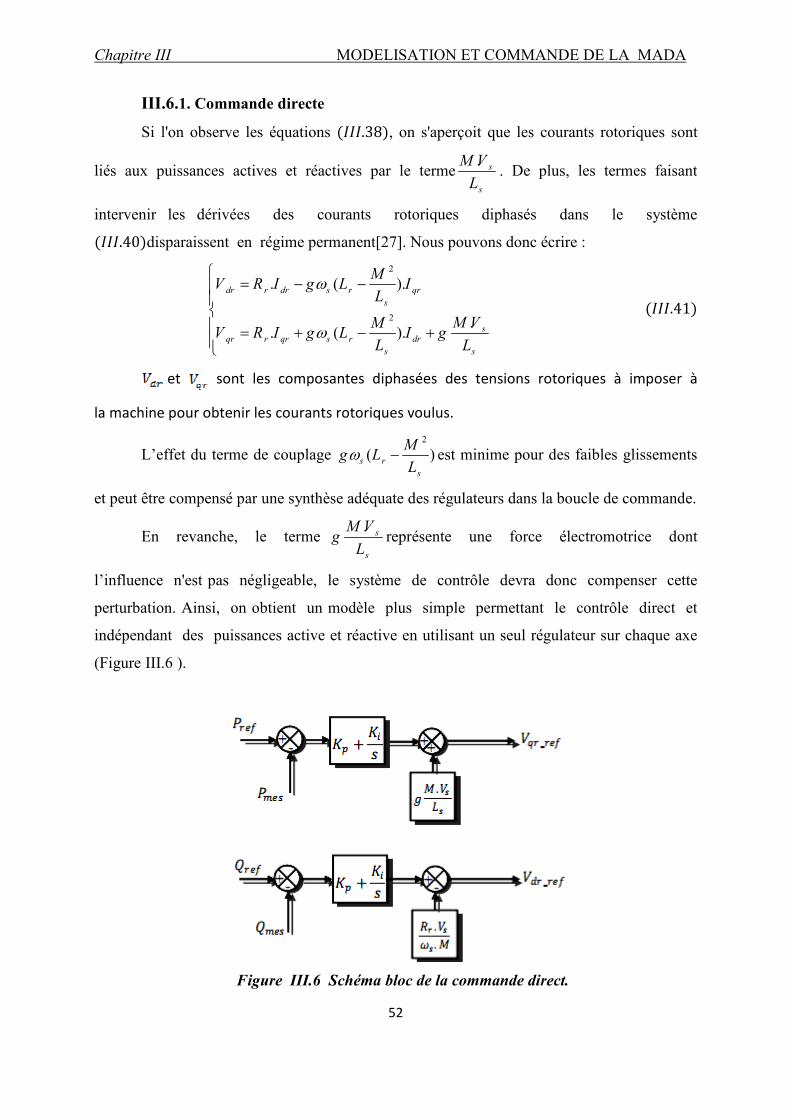
Chapitre III MODELISATION ET COMMANDE DE LA MADA
52
III.6.1. Commande directe
Si l'on observe les équations (.38), on s'aperçoit que les courants rotoriques sont
liés aux puissances actives et réactives par le terme. s
s
M V
L. De plus, les termes faisant
intervenir les dérivées des courants rotoriques diphasés dans le système
(.40)disparaissent en régime permanent[27]. Nous pouvons donc écrire :
2
2
. ( ).
.. ( ).
dr r dr s r qr
s
sqr r qr s r dr
s s
MV R I g L I
L
M VMV R I g L I g
L L
ω
ω
= − −
= + − +
(.41)
et sont les composantes diphasées des tensions rotoriques à imposer à
la machine pour obtenir les courants rotoriques voulus.
L’effet du terme de couplage 2
( )s r
s
Mg L
Lω − est minime pour des faibles glissements
et peut être compensé par une synthèse adéquate des régulateurs dans la boucle de commande.
En revanche, le terme . s
s
M Vg
Lreprésente une force électromotrice dont
l’influence n'est pas négligeable, le système de contrôle devra donc compenser cette
perturbation. Ainsi, on obtient un modèle plus simple permettant le contrôle direct et
indépendant des puissances active et réactive en utilisant un seul régulateur sur chaque axe
(Figure III.6 ).
Figure III.6 Schéma bloc de la commande direct.
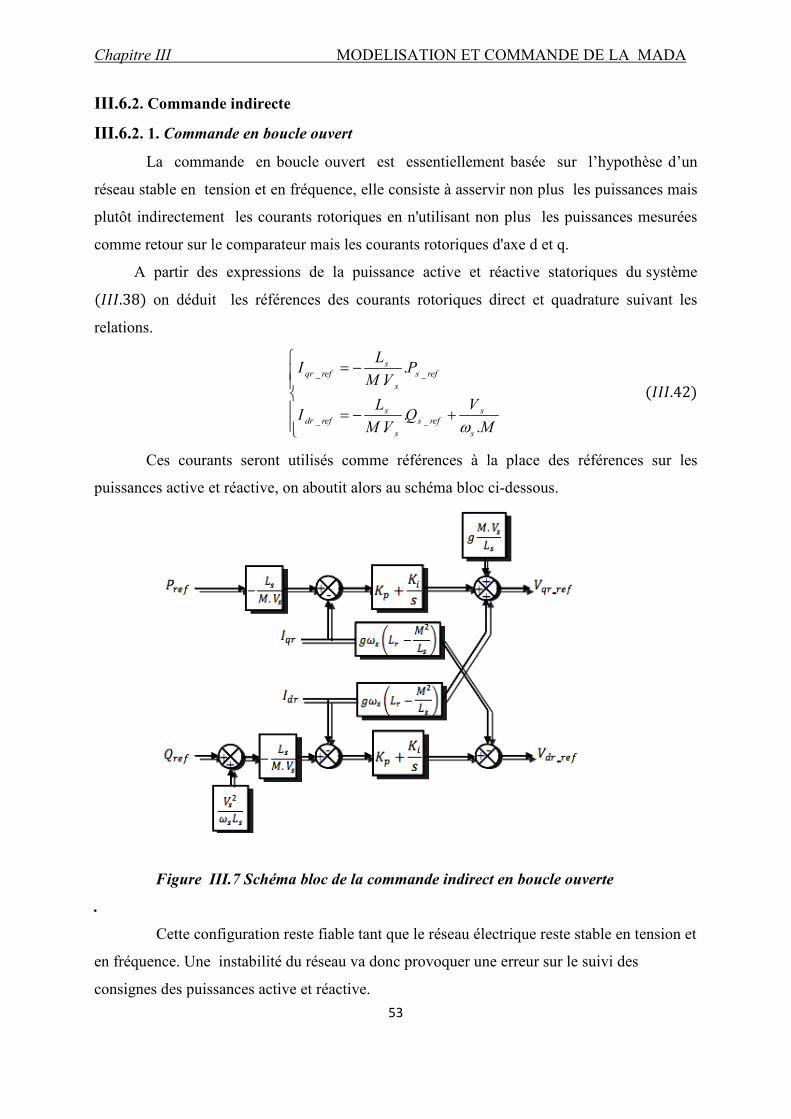
Chapitre III MODELISATION ET COMMANDE DE LA MADA
53
III.6.2. Commande indirecte
III.6.2. 1. Commande en boucle ouvert
La commande en boucle ouvert est essentiellement basée sur l’hypothèse d’un
réseau stable en tension et en fréquence, elle consiste à asservir non plus les puissances mais
plutôt indirectement les courants rotoriques en n'utilisant non plus les puissances mesurées
comme retour sur le comparateur mais les courants rotoriques d'axe d et q.
A partir des expressions de la puissance active et réactive statoriques du système
(.38) on déduit les références des courants rotoriques direct et quadrature suivant les
relations.
_ _
_ _
..
.. .
sqr ref s ref
s
s sdr ref s ref
s s
LI P
M V
L VI Q
M V Mω
= − = − +
(.42)
Ces courants seront utilisés comme références à la place des références sur les
puissances active et réactive, on aboutit alors au schéma bloc ci-dessous.
Figure III.7 Schéma bloc de la commande indirect en boucle ouverte
.
Cette configuration reste fiable tant que le réseau électrique reste stable en tension et
en fréquence. Une instabilité du réseau va donc provoquer une erreur sur le suivi des
consignes des puissances active et réactive.
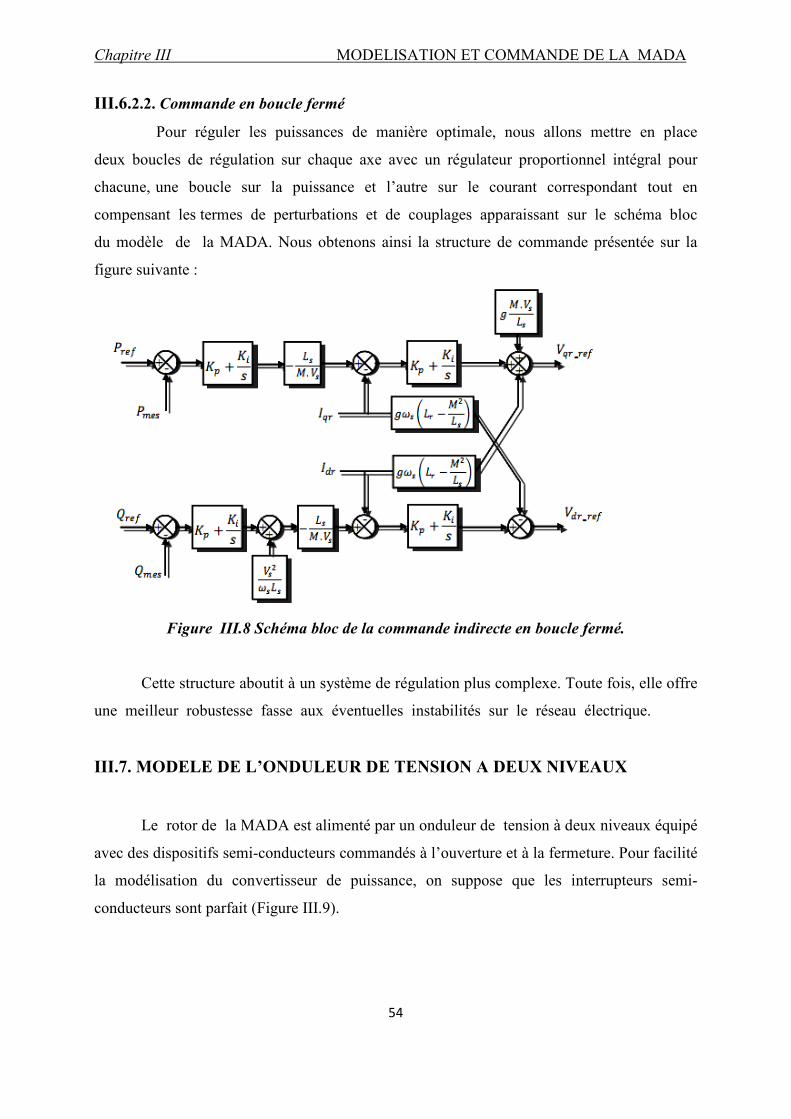
Chapitre III MODELISATION ET COMMANDE DE LA MADA
54
III.6.2.2. Commande en boucle fermé
Pour réguler les puissances de manière optimale, nous allons mettre en place
deux boucles de régulation sur chaque axe avec un régulateur proportionnel intégral pour
chacune, une boucle sur la puissance et l’autre sur le courant correspondant tout en
compensant les termes de perturbations et de couplages apparaissant sur le schéma bloc
du modèle de la MADA. Nous obtenons ainsi la structure de commande présentée sur la
figure suivante :
Figure III.8 Schéma bloc de la commande indirecte en boucle fermé.
Cette structure aboutit à un système de régulation plus complexe. Toute fois, elle offre
une meilleur robustesse fasse aux éventuelles instabilités sur le réseau électrique.
III.7. MODELE DE L’ONDULEUR DE TENSION A DEUX NIVEAUX
Le rotor de la MADA est alimenté par un onduleur de tension à deux niveaux équipé
avec des dispositifs semi-conducteurs commandés à l’ouverture et à la fermeture. Pour facilité
la modélisation du convertisseur de puissance, on suppose que les interrupteurs semi-
conducteurs sont parfait (Figure III.9).
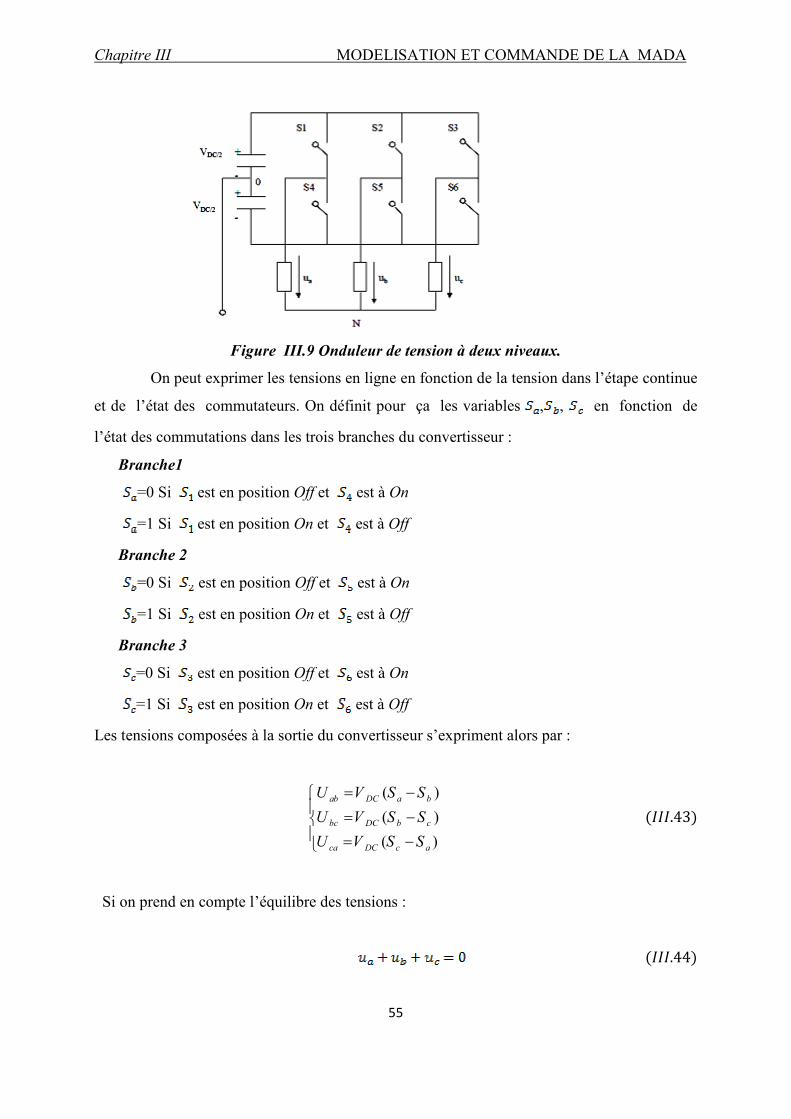
Chapitre III MODELISATION ET COMMANDE DE LA MADA
55
Figure III.9 Onduleur de tension à deux niveaux.
On peut exprimer les tensions en ligne en fonction de la tension dans l’étape continue
et de l’état des commutateurs. On définit pour ça les variables , , en fonction de
l’état des commutations dans les trois branches du convertisseur :
Branche1
=0 Si est en position Off et est à On
=1 Si est en position On et est à Off
Branche 2
=0 Si est en position Off et est à On
=1 Si est en position On et est à Off
Branche 3
=0 Si est en position Off et est à On
=1 Si est en position On et est à Off
Les tensions composées à la sortie du convertisseur s’expriment alors par :
( )
( )
( )
ab DC a b
bc DC b c
ca DC c a
U V S S
U V S S
U V S S
= −
= − = −
(.43)
Si on prend en compte l’équilibre des tensions :
(.44)

Chapitre III MODELISATION ET COMMANDE DE LA MADA
56
On en déduit les expressions des tensions simples par rapport aux tensions
composées comme suit :
1( )
3
1( )
3
1( )
3
a ab ca
b bc ab
c ca bc
u U U
u U U
u U U
= −
= −
= −
(.45)
D’où on obtient :
(2 )3
(2 )3
(2 )3
DCa a b c
DCb b c a
DCc c a b
Vu S S S
Vu S S S
Vu S S S
= − −
= − −
= − −
(.46)
Ou encore sous forme matricielle :
2 1
1 2 13
1 2
1
1
a a
DCb b
c cn
u SV
u S
u S
− = − − −
−
− (.47)
La tension de sortie de l’onduleur est contrôlée par la technique de
modulation de largeur d’impulsion (MLI) triangulosinusoidale qui permet le réglage
simultané de la fréquence et de la valeur efficace de tension de sortie.
III.7.1. Principe de la MLI
La technique de modulation de largeur d’impulsion triangulosinusoïdale
consiste à comparer en chaque instant un signal triangulaire de fréquence , que nous
appellerons porteuse, à trois signaux de commande, notés , et .Ces signaux sont
les images des tensions que l’on souhaite appliquer sur chaque phase [34]. Les
commutations des interrupteurs ont lieu quand on a une égalité du type :
( ) ( )iu t tω= (.48)
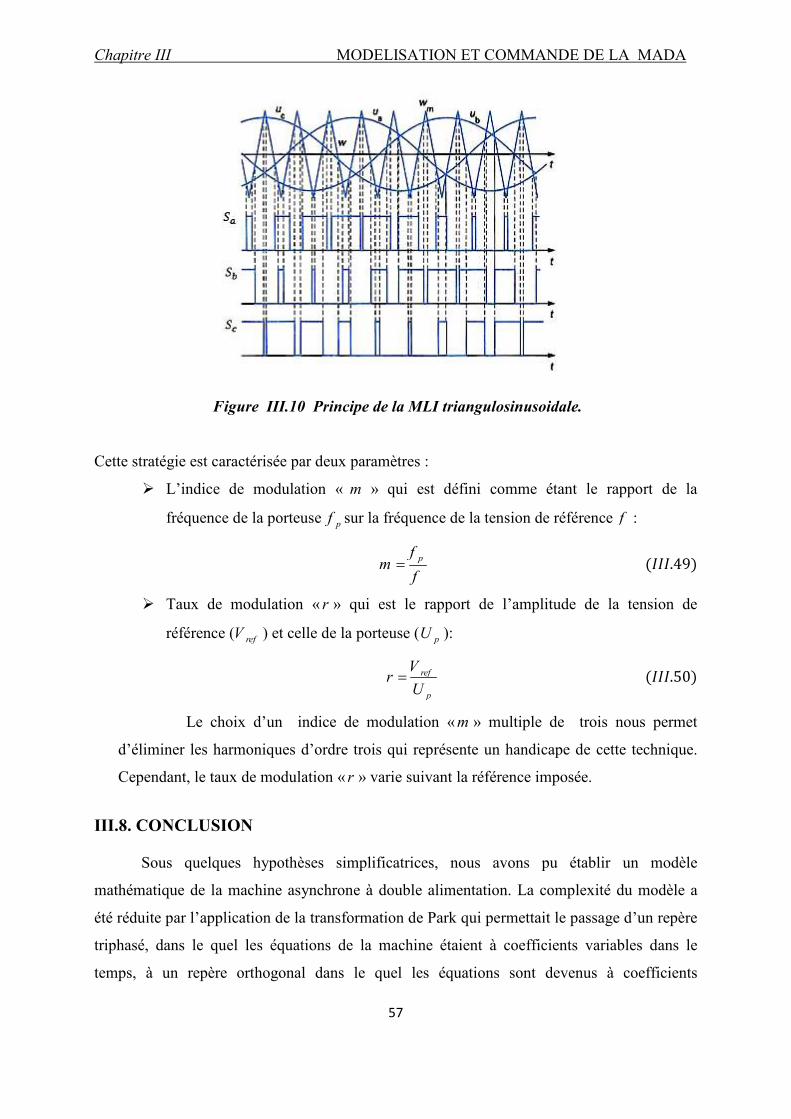
Chapitre III MODELISATION ET COMMANDE DE LA MADA
57
Figure III.10 Principe de la MLI triangulosinusoidale.
Cette stratégie est caractérisée par deux paramètres :
L’indice de modulation « m » qui est défini comme étant le rapport de la
fréquence de la porteuse pf sur la fréquence de la tension de référence f :
pfm
f= (.49)
Taux de modulation « r » qui est le rapport de l’amplitude de la tension de
référence ( refV ) et celle de la porteuse ( pU ):
ref
p
Vr
U= (.50)
Le choix d’un indice de modulation «m » multiple de trois nous permet
d’éliminer les harmoniques d’ordre trois qui représente un handicape de cette technique.
Cependant, le taux de modulation « r » varie suivant la référence imposée.
III.8. CONCLUSION
Sous quelques hypothèses simplificatrices, nous avons pu établir un modèle
mathématique de la machine asynchrone à double alimentation. La complexité du modèle a
été réduite par l’application de la transformation de Park qui permettait le passage d’un repère
triphasé, dans le quel les équations de la machine étaient à coefficients variables dans le
temps, à un repère orthogonal dans le quel les équations sont devenus à coefficients

Chapitre III MODELISATION ET COMMANDE DE LA MADA
58
constantes dans le temps, aussi bien nous avons pu élaborer des différents schémas bloc de
commande de la MADA, ainsi que la commande MLI.

CHAPITRE IV
RESULTATS DE SIMULATION
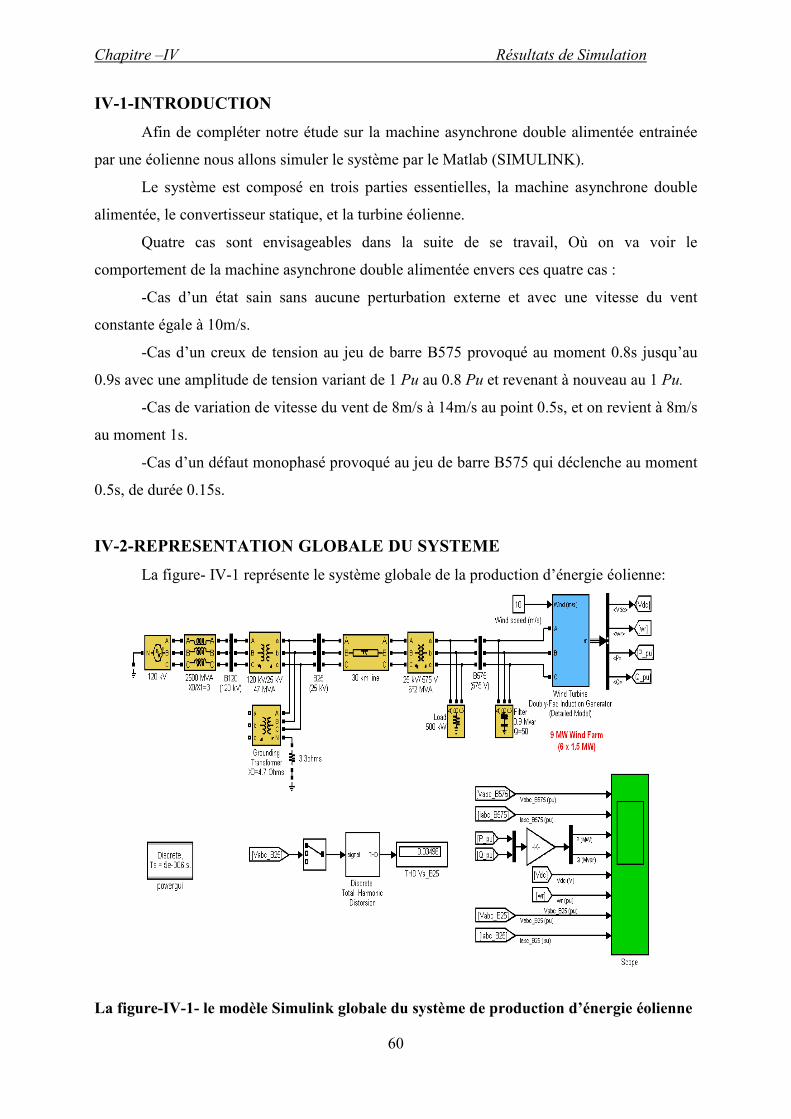
Chapitre –IV Résultats de Simulation
60
IV-1-INTRODUCTION
Afin de compléter notre étude sur la machine asynchrone double alimentée entrainée
par une éolienne nous allons simuler le système par le Matlab (SIMULINK).
Le système est composé en trois parties essentielles, la machine asynchrone double
alimentée, le convertisseur statique, et la turbine éolienne.
Quatre cas sont envisageables dans la suite de se travail, Où on va voir le
comportement de la machine asynchrone double alimentée envers ces quatre cas :
-Cas d’un état sain sans aucune perturbation externe et avec une vitesse du vent
constante égale à 10m/s.
-Cas d’un creux de tension au jeu de barre B575 provoqué au moment 0.8s jusqu’au
0.9s avec une amplitude de tension variant de 1 Pu au 0.8 Pu et revenant à nouveau au 1 Pu.
-Cas de variation de vitesse du vent de 8m/s à 14m/s au point 0.5s, et on revient à 8m/s
au moment 1s.
-Cas d’un défaut monophasé provoqué au jeu de barre B575 qui déclenche au moment
0.5s, de durée 0.15s.
IV-2-REPRESENTATION GLOBALE DU SYSTEME
La figure- IV-1 représente le système globale de la production d’énergie éolienne:
La figure-IV-1- le modèle Simulink globale du système de production d’énergie éolienne

Chapitre –IV Résultats de Simulation
61
La figure-IV-2 représente le modèle Simulink de la machine asynchrone MADA et les
deux convertisseurs M.L.I, alors que la figure-IV-3 représente le modèle Simulink de la
turbine éolienne.
Figure-IV-2- le modèle Simulink d’une machine asynchrone MADA avec un
convertisseur M.L.I
Les paramètres de la MADA sont mentionnés en annexe 1.
Figure-IV-3- le modèle Simulink d’une turbine éolienne
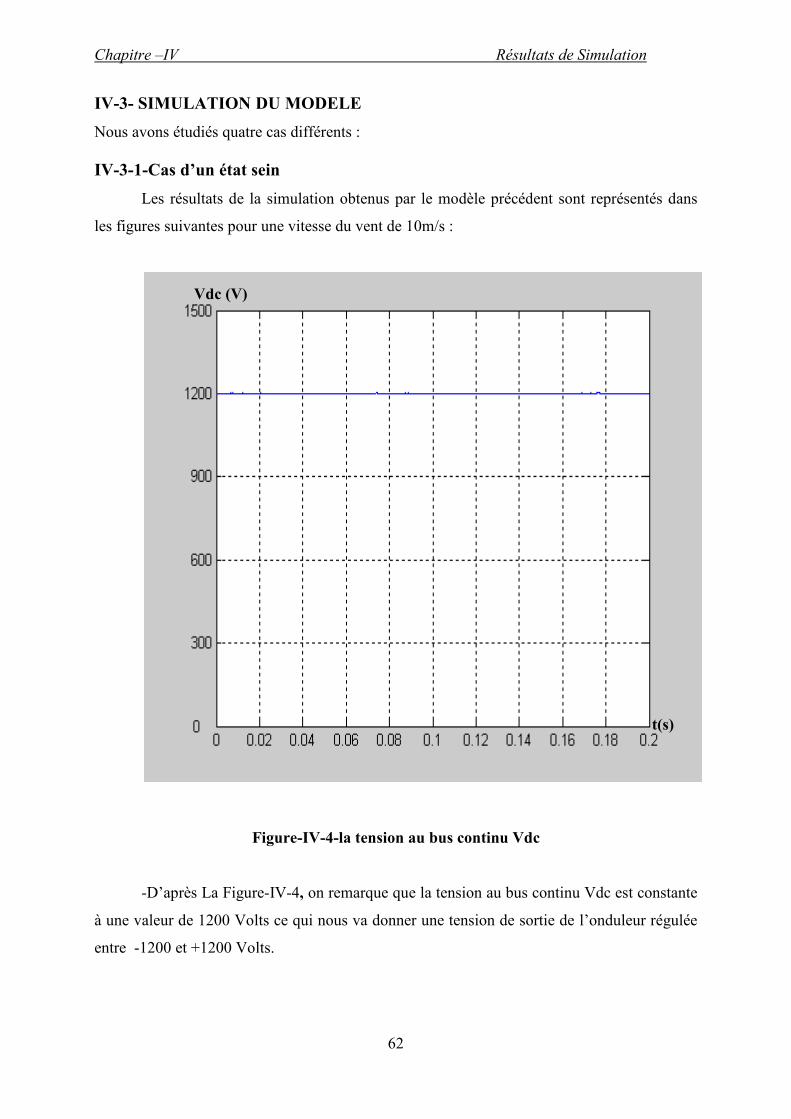
Chapitre –IV Résultats de Simulation
62
IV-3- SIMULATION DU MODELE
Nous avons étudiés quatre cas différents :
IV-3-1-Cas d’un état sein
Les résultats de la simulation obtenus par le modèle précédent sont représentés dans
les figures suivantes pour une vitesse du vent de 10m/s :
Figure-IV-4-la tension au bus continu Vdc
-D’après La Figure-IV-4, on remarque que la tension au bus continu Vdc est constante
à une valeur de 1200 Volts ce qui nous va donner une tension de sortie de l’onduleur régulée
entre -1200 et +1200 Volts.
t(s)
Vdc (V)
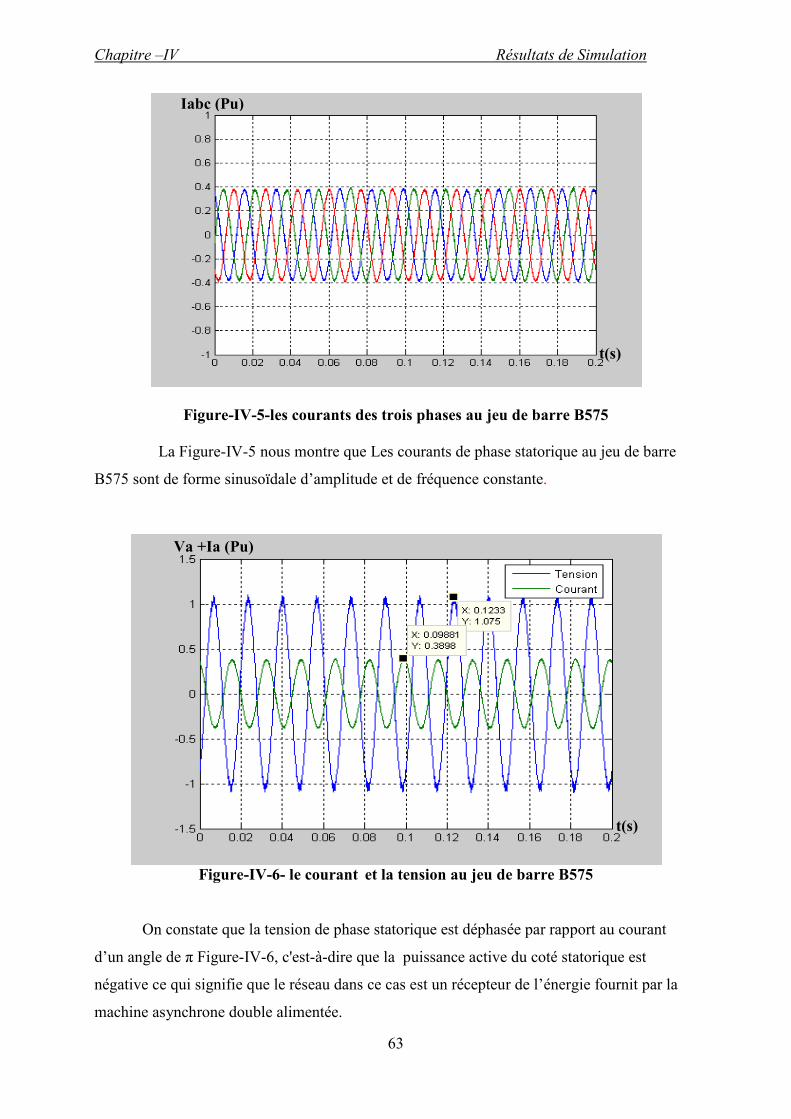
Chapitre –IV Résultats de Simulation
63
Figure-IV-5-les courants des trois phases au jeu de barre B575
La Figure-IV-5 nous montre que Les courants de phase statorique au jeu de barre
B575 sont de forme sinusoïdale d’amplitude et de fréquence constante.
Figure-IV-6- le courant et la tension au jeu de barre B575
On constate que la tension de phase statorique est déphasée par rapport au courant
d’un angle de π Figure-IV-6, c'est-à-dire que la puissance active du coté statorique est
négative ce qui signifie que le réseau dans ce cas est un récepteur de l’énergie fournit par la
machine asynchrone double alimentée.
t(s)
Iabc (Pu)
t(s)
Va +Ia (Pu)
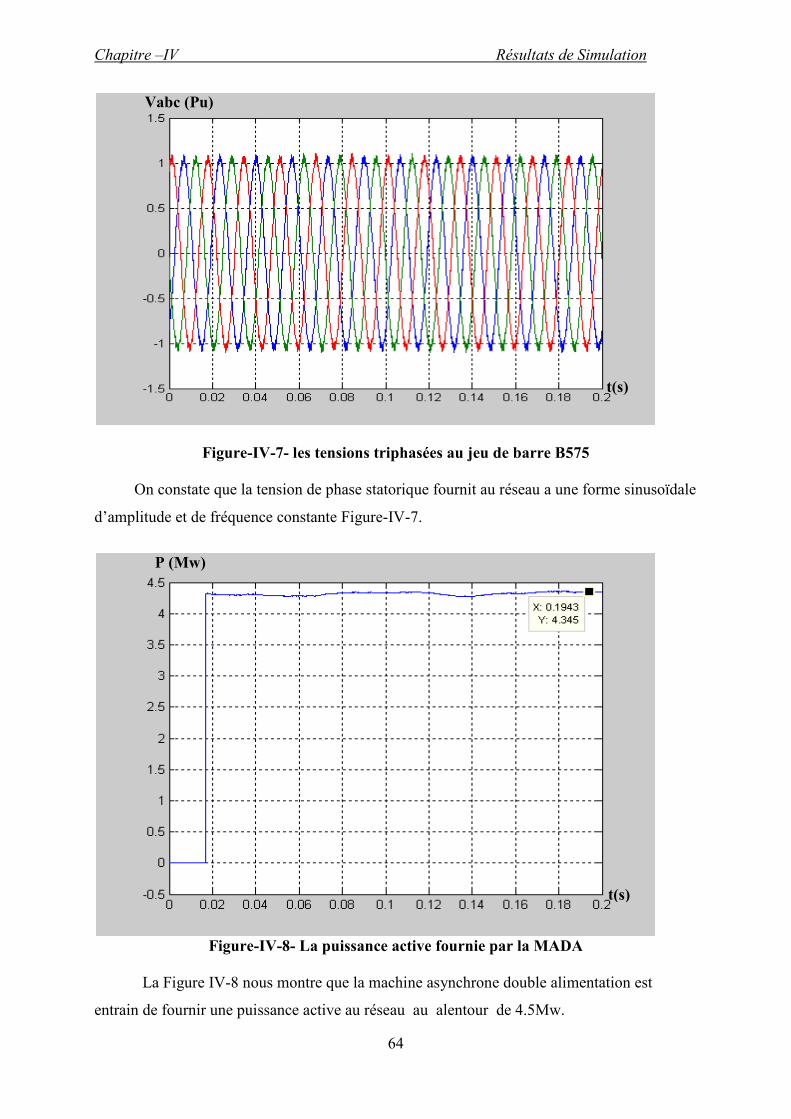
Chapitre –IV Résultats de Simulation
64
Figure-IV-7- les tensions triphasées au jeu de barre B575
On constate que la tension de phase statorique fournit au réseau a une forme sinusoïdale
d’amplitude et de fréquence constante Figure-IV-7.
Figure-IV-8- La puissance active fournie par la MADA
La Figure IV-8 nous montre que la machine asynchrone double alimentation est
entrain de fournir une puissance active au réseau au alentour de 4.5Mw.
t(s)
Vabc (Pu)
t(s)
P (Mw)
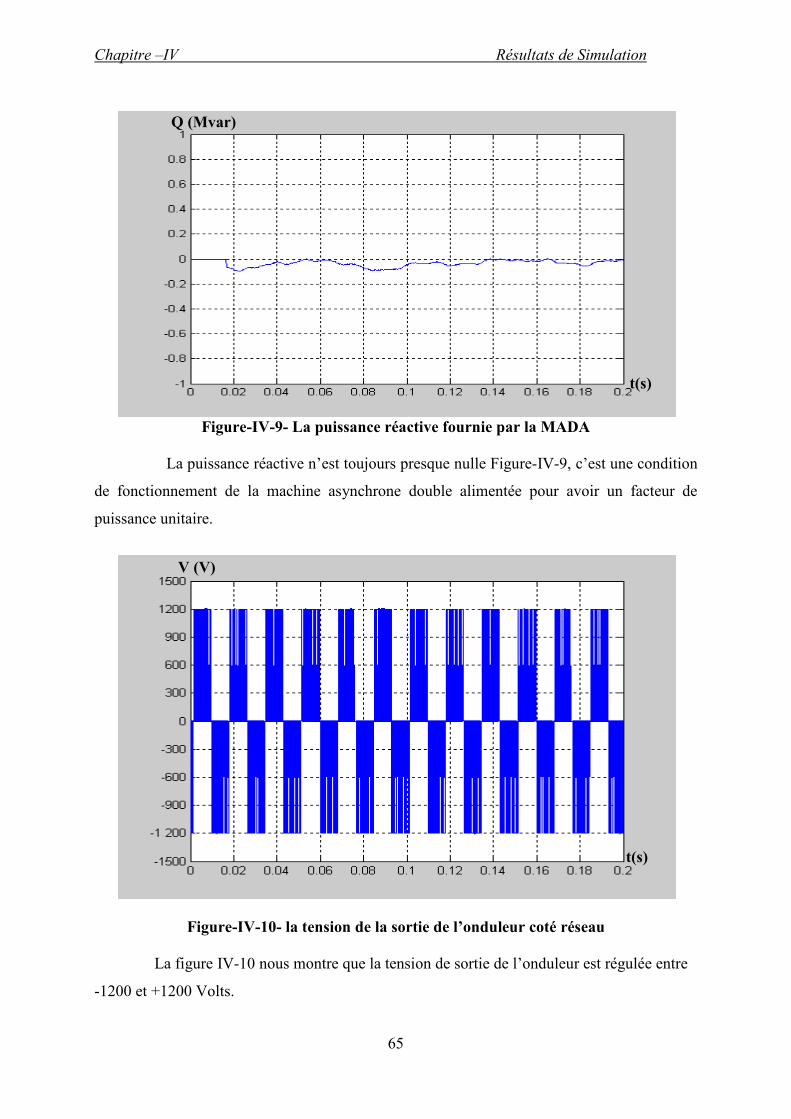
Chapitre –IV Résultats de Simulation
65
Figure-IV-9- La puissance réactive fournie par la MADA
La puissance réactive n’est toujours presque nulle Figure-IV-9, c’est une condition
de fonctionnement de la machine asynchrone double alimentée pour avoir un facteur de
puissance unitaire.
Figure-IV-10- la tension de la sortie de l’onduleur coté réseau
La figure IV-10 nous montre que la tension de sortie de l’onduleur est régulée entre
-1200 et +1200 Volts.
t(s)
Q (Mvar)
t(s)
V (V)
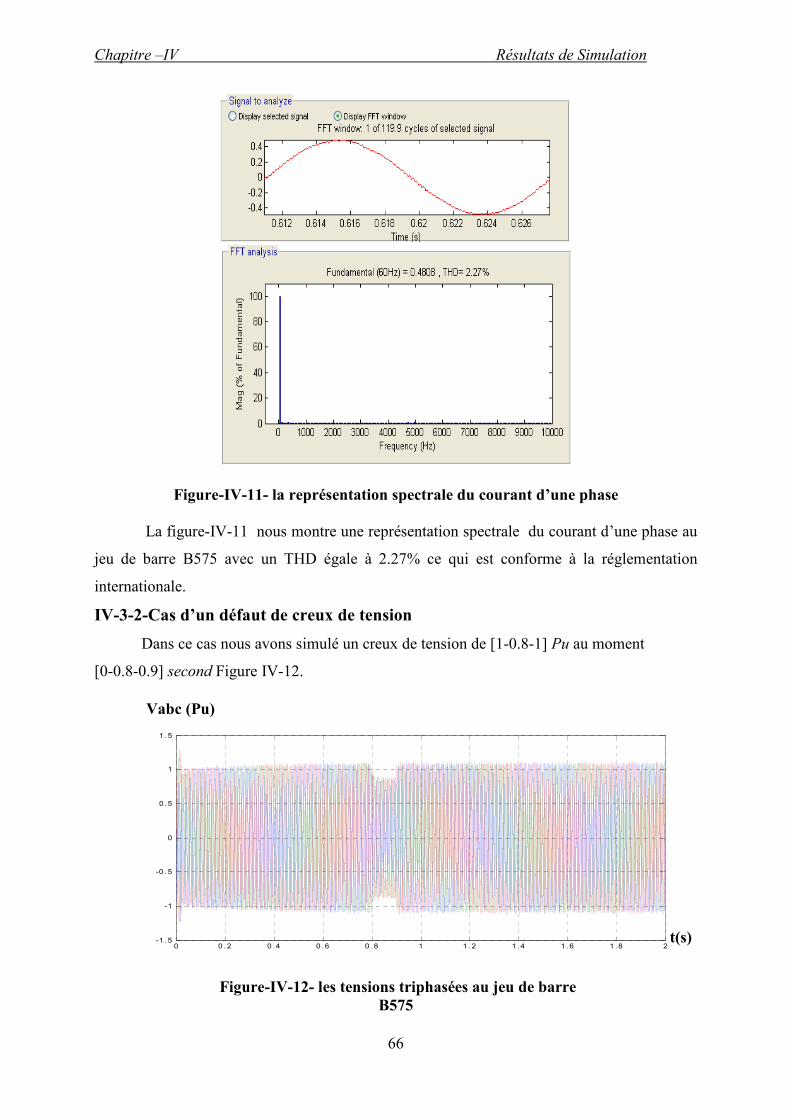
Chapitre –IV Résultats de Simulation
66
Figure-IV-11- la représentation spectrale du courant d’une phase
La figure-IV-11 nous montre une représentation spectrale du courant d’une phase au
jeu de barre B575 avec un THD égale à 2.27% ce qui est conforme à la réglementation
internationale.
IV-3-2-Cas d’un défaut de creux de tension
Dans ce cas nous avons simulé un creux de tension de [1-0.8-1] Pu au moment
[0-0.8-0.9] second Figure IV-12.
Figure-IV-12- les tensions triphasées au jeu de barre
B575
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
Vabc (Pu)
t(s)

Chapitre –IV Résultats de Simulation
67
Figure-IV-13-les courants des trois phases au jeu de barre B575
La figure IV-13 nous montre que les courants des trois phases au jeu de barre B575
sont infectés au même moment du défaut.
Figure-IV-14- La puissance active fournie par la MADA
Dans la figure IV-14, on remarque que la puissance active produite par la MADA s’est
déstabilisée au moment de défaut et revient a se stabiliser lors de l’abscence de défaut de
creux de tension.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 . 8 2-2 .5
-2
-1 .5
-1
-0 .5
0
0 .5
1
1 .5
2
2 .5
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-8
-6
-4
-2
0
2
4
6
t(s)
Iabc (Pu)
t(s)
P (Mw)
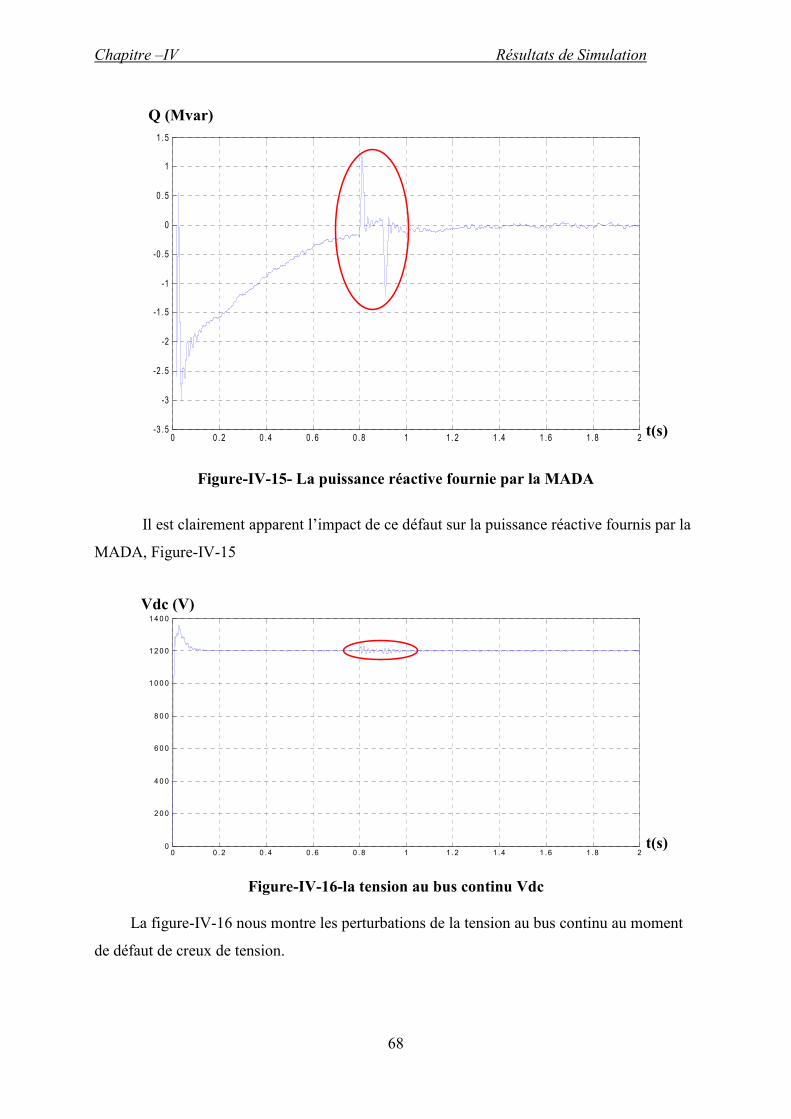
Chapitre –IV Résultats de Simulation
68
Figure-IV-15- La puissance réactive fournie par la MADA
Il est clairement apparent l’impact de ce défaut sur la puissance réactive fournis par la
MADA, Figure-IV-15
Figure-IV-16-la tension au bus continu Vdc
La figure-IV-16 nous montre les perturbations de la tension au bus continu au moment
de défaut de creux de tension.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-3 .5
-3
-2 .5
-2
-1 .5
-1
-0 .5
0
0 .5
1
1 .5
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 20
200
400
600
800
1000
1200
1400
t(s)
Q (Mvar)
t(s)
Vdc (V)
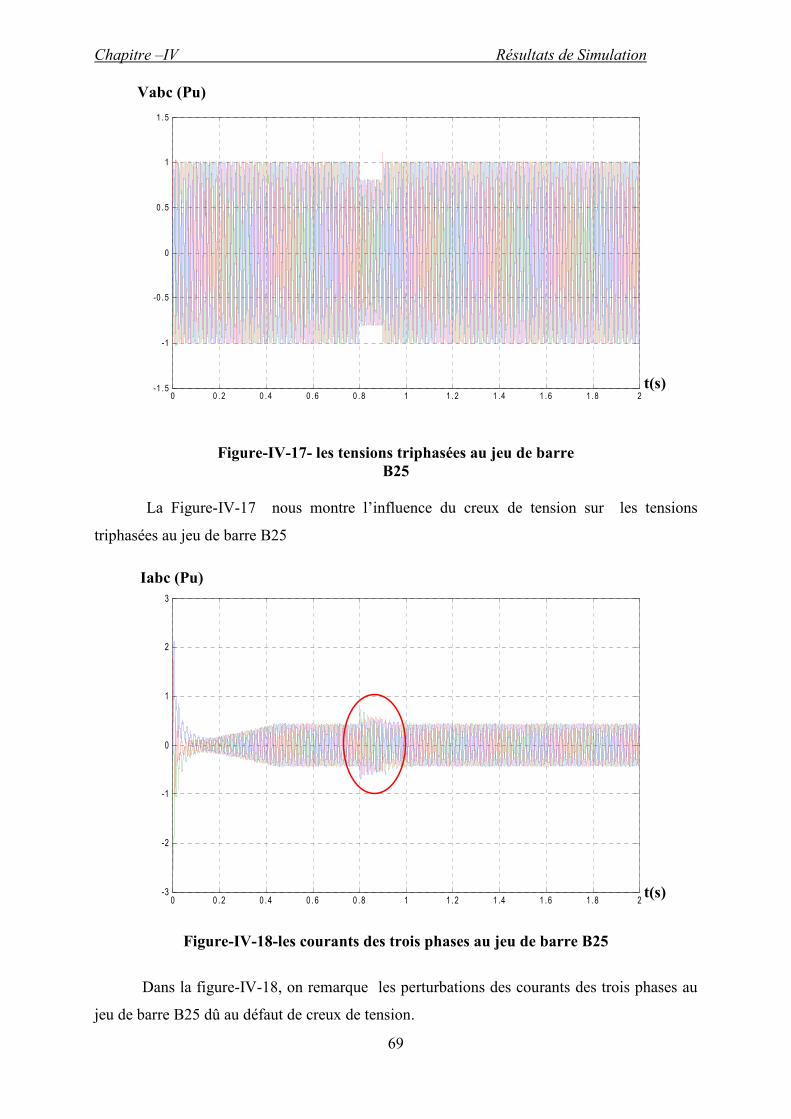
Chapitre –IV Résultats de Simulation
69
Figure-IV-17- les tensions triphasées au jeu de barre
B25
La Figure-IV-17 nous montre l’influence du creux de tension sur les tensions
triphasées au jeu de barre B25
Figure-IV-18-les courants des trois phases au jeu de barre B25
Dans la figure-IV-18, on remarque les perturbations des courants des trois phases au
jeu de barre B25 dû au défaut de creux de tension.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-3
-2
-1
0
1
2
3
t(s)
t(s)
Iabc (Pu)
Vabc (Pu)
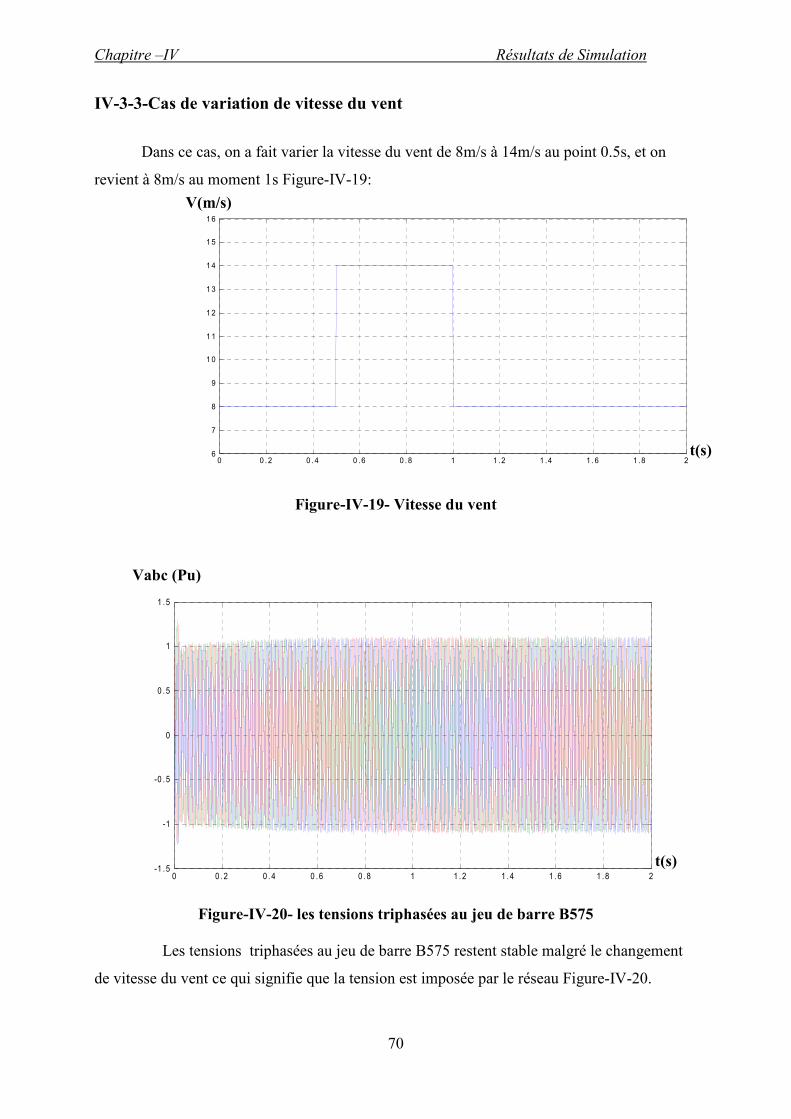
Chapitre –IV Résultats de Simulation
70
IV-3-3-Cas de variation de vitesse du vent
Dans ce cas, on a fait varier la vitesse du vent de 8m/s à 14m/s au point 0.5s, et on
revient à 8m/s au moment 1s Figure-IV-19:
Figure-IV-19- Vitesse du vent
Figure-IV-20- les tensions triphasées au jeu de barre B575
Les tensions triphasées au jeu de barre B575 restent stable malgré le changement
de vitesse du vent ce qui signifie que la tension est imposée par le réseau Figure-IV-20.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 26
7
8
9
10
11
12
13
14
15
16
0 0 .2 0 . 4 0 .6 0 .8 1 1 .2 1 .4 1 . 6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
t(s)
Vabc (Pu)
V(m/s)
t(s)
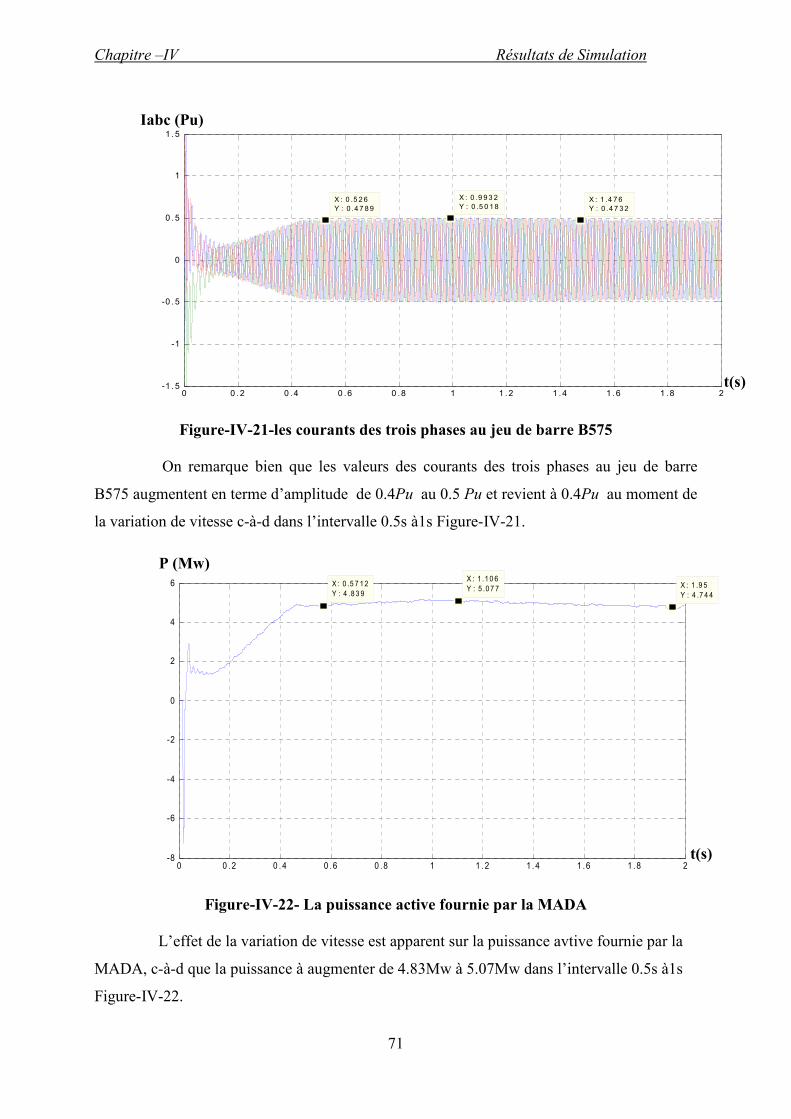
Chapitre –IV Résultats de Simulation
71
Figure-IV-21-les courants des trois phases au jeu de barre B575
On remarque bien que les valeurs des courants des trois phases au jeu de barre
B575 augmentent en terme d’amplitude de 0.4Pu au 0.5 Pu et revient à 0.4Pu au moment de
la variation de vitesse c-à-d dans l’intervalle 0.5s à1s Figure-IV-21.
Figure-IV-22- La puissance active fournie par la MADA
L’effet de la variation de vitesse est apparent sur la puissance avtive fournie par la
MADA, c-à-d que la puissance à augmenter de 4.83Mw à 5.07Mw dans l’intervalle 0.5s à1s
Figure-IV-22.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
X : 1 .4 76
Y : 0 .4 7 32
X : 0 .9 93 2
Y : 0 .5 0 18
X : 0 .5 26
Y : 0 .4 7 89
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-8
-6
-4
-2
0
2
4
6 X : 1 .9 5
Y : 4 .7 4 4
X : 0 .5 7 12
Y : 4 .8 3 9
X : 1 .1 0 6
Y : 5 .0 7 7
t(s)
Iabc (Pu)
t(s)
P (Mw)
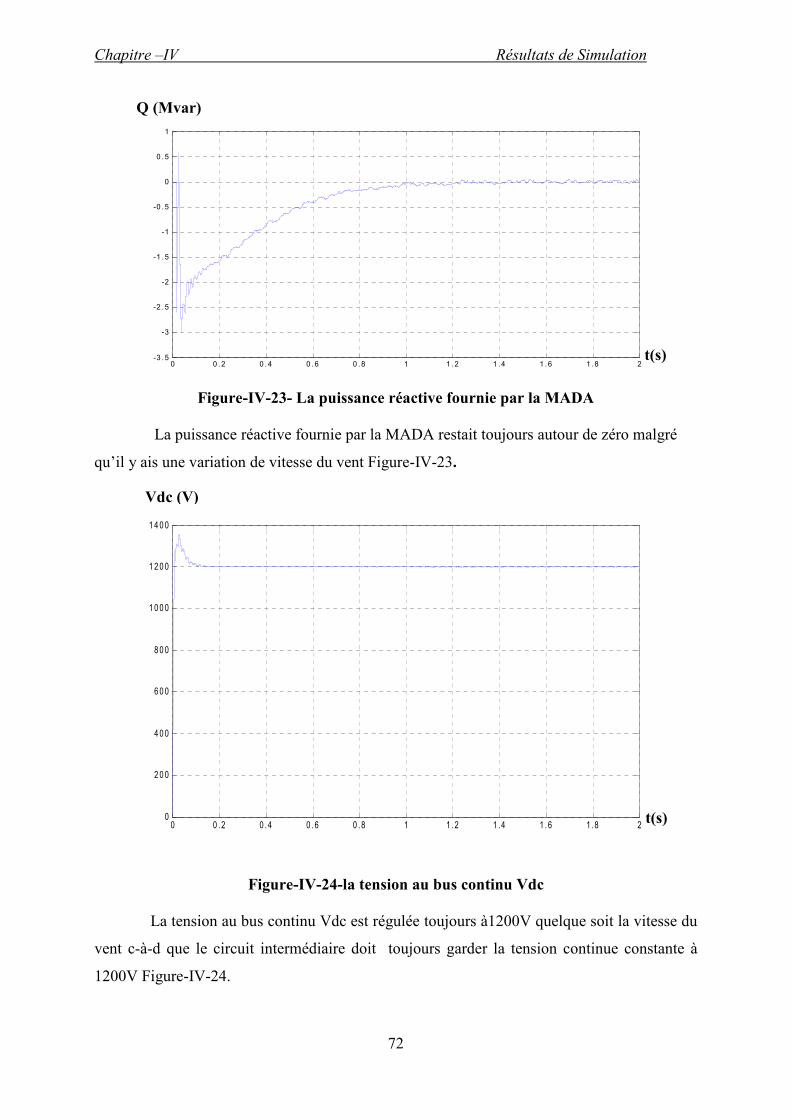
Chapitre –IV Résultats de Simulation
72
Figure-IV-23- La puissance réactive fournie par la MADA
La puissance réactive fournie par la MADA restait toujours autour de zéro malgré
qu’il y ais une variation de vitesse du vent Figure-IV-23.
Figure-IV-24-la tension au bus continu Vdc
La tension au bus continu Vdc est régulée toujours à1200V quelque soit la vitesse du
vent c-à-d que le circuit intermédiaire doit toujours garder la tension continue constante à
1200V Figure-IV-24.
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-3 .5
-3
-2 .5
-2
-1 .5
-1
-0 .5
0
0 .5
1
0 0 .2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 20
200
400
600
800
1000
1200
1400
t(s)
Q (Mvar)
t(s)
Vdc (V)
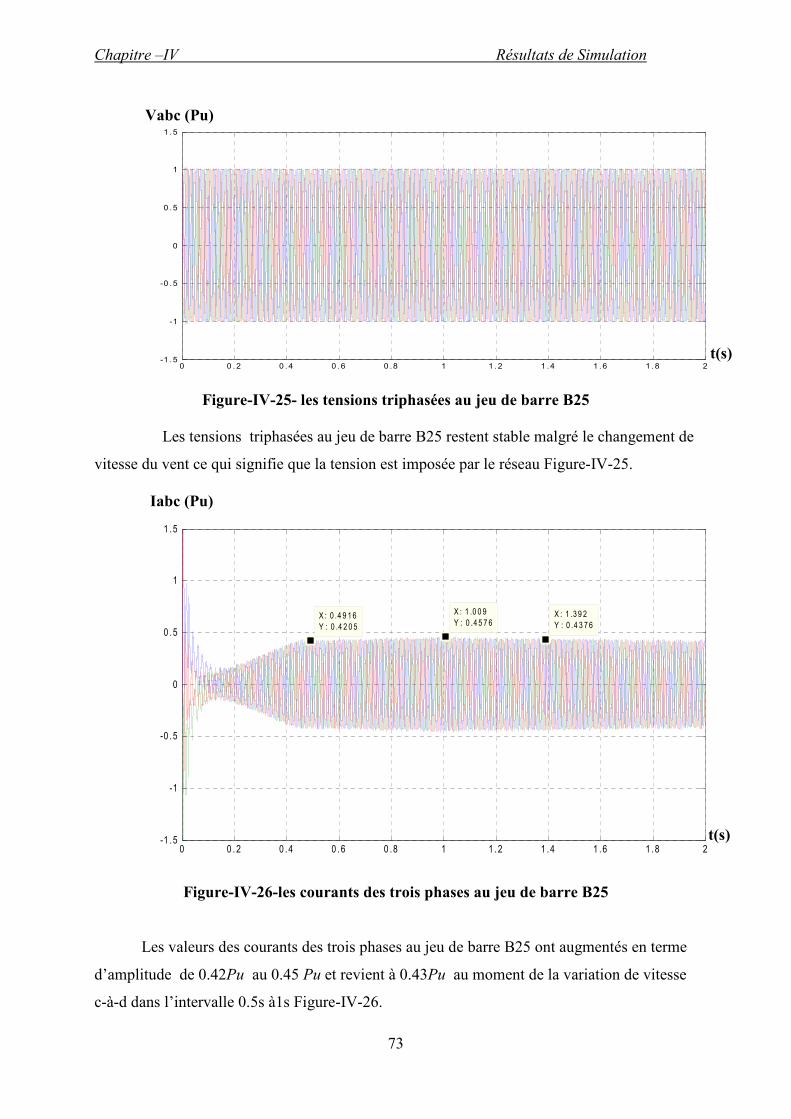
Chapitre –IV Résultats de Simulation
73
Figure-IV-25- les tensions triphasées au jeu de barre B25
Les tensions triphasées au jeu de barre B25 restent stable malgré le changement de
vitesse du vent ce qui signifie que la tension est imposée par le réseau Figure-IV-25.
Figure-IV-26-les courants des trois phases au jeu de barre B25
Les valeurs des courants des trois phases au jeu de barre B25 ont augmentés en terme
d’amplitude de 0.42Pu au 0.45 Pu et revient à 0.43Pu au moment de la variation de vitesse
c-à-d dans l’intervalle 0.5s à1s Figure-IV-26.
0 0 . 2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
0 0 . 2 0 .4 0 .6 0 .8 1 1 .2 1 .4 1 .6 1 .8 2-1 .5
-1
-0 .5
0
0 .5
1
1 .5
X : 1 .3 9 2
Y : 0 .4 3 76
X : 0 .4 9 16
Y : 0 .4 2 0 5
X : 1 .0 0 9
Y : 0 .4 5 7 6
t(s)
Vabc (Pu)
t(s)
Iabc (Pu)

Chapitre –IV Résultats de Simulation
74
IV-3-4-Cas d’un défaut monophasé
Dans ce cas, on va simuler un défaut monophasé au niveau du jeu de barre 575 à
l’instant 0.5s et la disparition du défaut à l’instant 0.5+0.15s, et cela pour une vitesse du vent
de 10m/s.
Figure-IV-27- les tensions triphasées au jeu de barre B575
Figure -IV-28-les courants des trois phases au jeu de barre
B575
L’effet du défaut monophasé sur les courants des trois phases au jeu de barre B575 est
montré sur la Figure -IV-28.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Temps (s)
Tension (Pu)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.5-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Temps (s)
Courant (Pu)
t(s)
Vabc (Pu)
t(s)
Iabc (Pu)
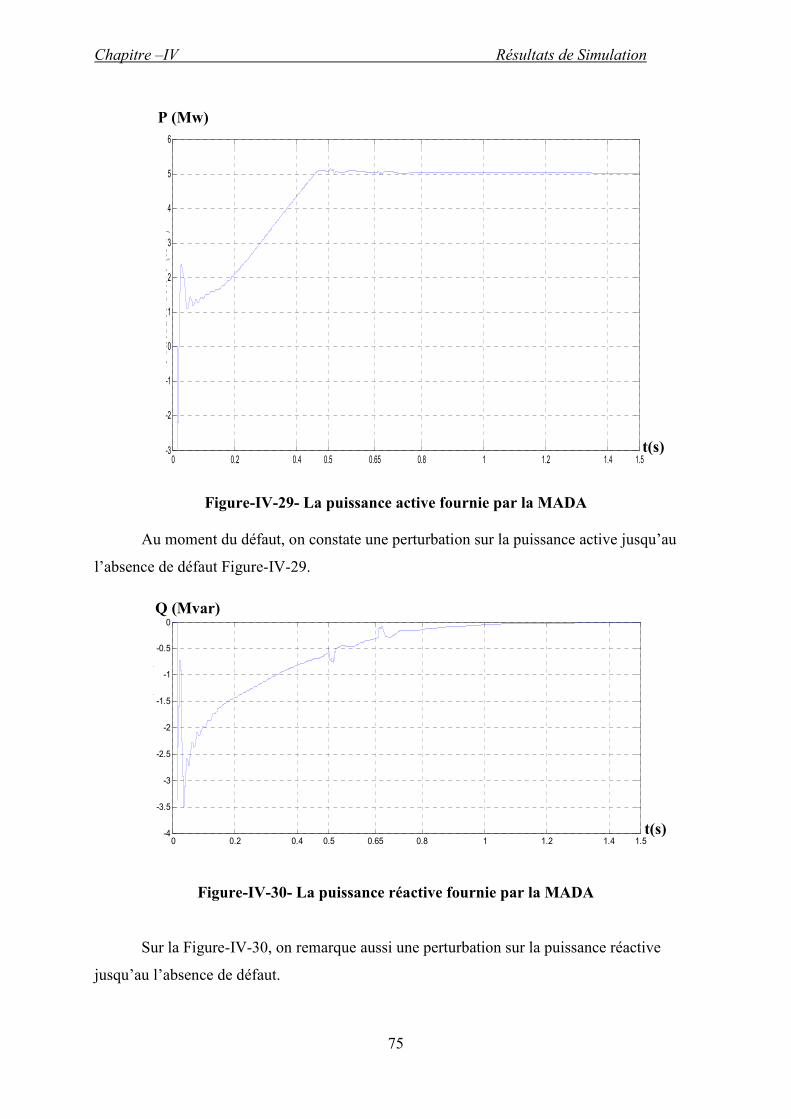
Chapitre –IV Résultats de Simulation
75
Figure-IV-29- La puissance active fournie par la MADA
Au moment du défaut, on constate une perturbation sur la puissance active jusqu’au
l’absence de défaut Figure-IV-29.
Figure-IV-30- La puissance réactive fournie par la MADA
Sur la Figure-IV-30, on remarque aussi une perturbation sur la puissance réactive
jusqu’au l’absence de défaut.
0 0.2 0.4 0.5 0.65 0.8 1 1.2 1.4 1.5-3
-2
-1
0
1
2
3
4
5
6
Temps (s)
Puissance active (M
w)
0 0.2 0.4 0.5 0.65 0.8 1 1.2 1.4 1.5-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
Temps (s)
Puissance reactive (Mvar)
t(s)
P (Mw)
t(s)
Q (Mvar)

Chapitre –IV Résultats de Simulation
76
Figure-IV-31-la tension au bus continu Vdc
Au moment du défaut, on constate aussi une perturbation sur la tension du bus continu
Figure-IV-31.
Figure-IV-32-les courants des trois phases au jeu de barre B25
L’impact du défaut monophasé sur les courants des trois phases au jeu de barre B25
est clair sur la Figure -IV-32 dans l’intervalle de 05s au 0.65s.
0 0.2 0.4 0.5 0.65 0.8 1 1.2 1.4 1.51150
1200
1250
1300
1350
1400
1450
1500
Temps (s)
Tension (V)
0 0.2 0.4 0.5 0.65 0.8 1 1.2 1.4 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
temps (s)
Courant (Pu)
t(s)
Vdc (V)
t(s)
Iabc (Pu)
Chapitre –IV Résultats de Simulation
77
IV-4- CONCLUSION
Dans cette partie nous avons présentés le modèle SIMULINK globale du système
c'est-à-dire la MADA, les deux convertisseurs statique et la turbine éolienne puis on a simulé
ce système de production d’énergie éolienne avec quatre cas différent :
-Cas d’un état sain sans aucune perturbation externe et avec une vitesse du vent
constante égale à 10m/s où on a présenté les allures des tensions continu, triphasés au jeu de
barres B575 etB25 et les courants triphasés au même jeu de barre ainsi que les puissance
active et réactive fourni par la MADA, les résultats obtenus indiquent que la qualité de signal
courant fourni par la MADA est bonne avec un THD égal à 2.27% et que la MADA entrain
de fournir de la puissance active au réseau tout en gardant toujours la puissance réactive
autour de zéro .
-Cas d’un creux de tension au jeu de barre B575 provoqué au moment 0.8s jusqu’au
0.9s, les graphes présentés de tension continu, des tensions triphasés au jeu de barres B575
etB25 et les courants triphasés au même jeu de barre nous présentent l’influence du creux de
tension sur la production de l’énergie électrique via l’énergie éolienne.
-Cas de variation de vitesse du vent de 8m/s à 14m/s au point 0.5s, d’où on a conclu
d’après les graphes présentés que les courants triphasés varient en fonction de la vitesse du
vent et par conséquent la puissance active fourni par la MADA par contre les tensions
triphasés sont imposées par le réseau électrique.
-Cas d’un défaut monophasé provoqué au jeu de barre B575 qui déclenche au moment
0.5s, de durée 0.15s, et d’après les figures présentées on a constater l’effet du défaut sur les
puissances actives et réactives fournis par la MADA ainsi que sur les tensions et les courants
au jeu de barres B575 etB25.
CONCLUSION GENERALE
78
CONCLUSION GENERALE
La maîtrise de l’énergie est de nos jours un défi politique et économique qui engendre
des conflits. Mais comment maîtriser la demande énergétique ? Une alternative est déjà de
réduire nos consommations d’énergie primaire (gaz, pétrole, charbon…) en utilisant des
énergies primaires renouvelables plus abondantes et moins coûteuses lors de leur
transformation ou de leur conversion. Parmi ces énergies, l’énergie éolienne, qui est appelée à
jouer un rôle plus important dans la production d’énergie renouvelable, sans rejet toxique ni
émission de CO2.
Dans ce travail, une recherche bibliographique sur le domaine des énergies
renouvelables nous a permis de connaître les différentes formes d’énergies existantes dans le
monde, en particulier l’énergie éolienne, à laquelle nous accordons plus d’importance, car elle
était l’objet de ce travail.
Une étude théorique des systèmes éoliens de production d’électricité a été effectuée,
ainsi que les différentes machines électriques utilisées dans les systèmes de conversion
d’énergie éolienne.
La machine asynchrone double alimentation et ces différentes structures sont aussi
étudiés dans ce mémoire particulièrement le double alimenté par le stator et le rotor, cette
dernière est proposée dans le système de conversion d’énergie éolienne.
L’objectif du système proposé est d’utiliser dans les convertisseurs des composants
électronique de puissance commandables à l’ouverture et à la fermeture, qui existent
actuellement sur le marché tel que les IGBT.GTO et les IGCT, ce qui nous permet d’appliquer
la commande de modulation de largeur d’impulsion (MLI) pour la minimisation des
harmoniques et l’amélioration du facteur de puissance dans le but d’optimiser et d’améliorer
le rendement de toute la chaîne de conversion d’énergie électrique.
Des perspectives intéressantes pouvant contribuées à l’amélioration du fonctionnement
du système proposé sont envisageables :
-Réalisation concrète et installation du système dans un site favorable en Algérie.
-Une étude expérimentale pour confirmer les résultats de la simulation.
-Contrôle du système par les techniques d’intelligence artificielle.
-Réaction du système vis à vis des déséquilibres du réseau.
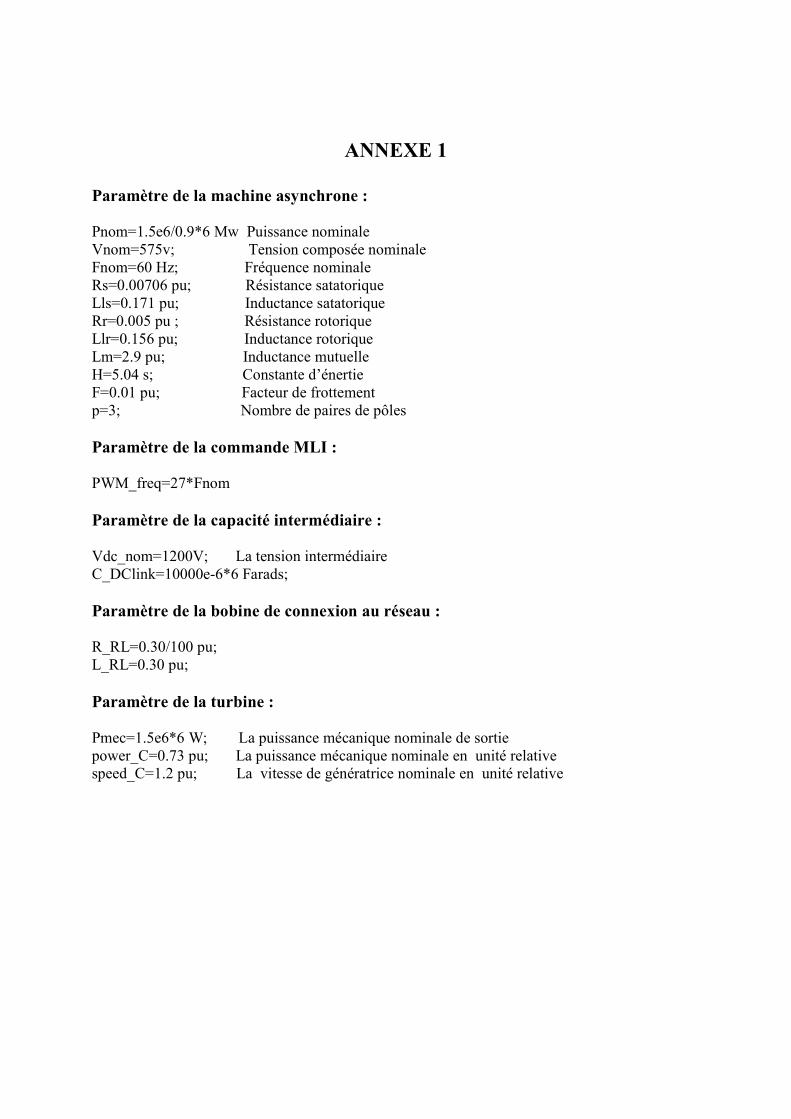
ANNEXE 1
Paramètre de la machine asynchrone :
Pnom=1.5e6/0.9*6 Mw Puissance nominale
Vnom=575v; Tension composée nominale
Fnom=60 Hz; Fréquence nominale
Rs=0.00706 pu; Résistance satatorique
Lls=0.171 pu; Inductance satatorique
Rr=0.005 pu ; Résistance rotorique
Llr=0.156 pu; Inductance rotorique
Lm=2.9 pu; Inductance mutuelle
H=5.04 s; Constante d’énertie
F=0.01 pu; Facteur de frottement
p=3; Nombre de paires de pôles
Paramètre de la commande MLI :
PWM_freq=27*Fnom
Paramètre de la capacité intermédiaire :
Vdc_nom=1200V; La tension intermédiaire
C_DClink=10000e-6*6 Farads;
Paramètre de la bobine de connexion au réseau :
R_RL=0.30/100 pu;
L_RL=0.30 pu;
Paramètre de la turbine :
Pmec=1.5e6*6 W; La puissance mécanique nominale de sortie
power_C=0.73 pu; La puissance mécanique nominale en unité relative
speed_C=1.2 pu; La vitesse de génératrice nominale en unité relative
BIBLIOGRAPHIE
[1] B.Multon "l’énergie électrique : analyse des ressources et de la production", Journées
électrotechnique du club EEA, Paris 29 Janvier 1999.
[2] B.Multon "production d’électricité par sources renouvelable", technique de l’ingénieur
D4005.
[3] Site internet : http://sitestest.uclouvain.be/elee/FR/realisations/EnergiesRenouvelables/
Enjeux/ Sources/ sources.htm "Les sources d'énergies renouvelables"
[4] Site internet : http:// www.élements.hbca/thème/fuels/table/boulot.htm. "Les énergies
renouvelable".
[5] H.Camblong "Minimisation de l’impact des perturbations d’origine éolienne dans la
génération d’électricité par des aérogénérateurs à vitesse variable" thèse de doctorat, Ecole
nationale supérieur d’arts et métiers centre de BORDEAUX, 18 Décembre 2003.
[6] Article : état de l’art dans les aérogénérateurs électriques
Extrait du rapport de synthèse ECRIN « L’Electronique de Puissance Vecteur d’Optimisation
Pour les Energies Renouvelables », paru mai en 2002
[7] S. BELAKEHAL" Conception et commande des machines à aimants permanents dédiées
aux énergies renouvelables", Thèse de doctorat, Université de Constantine, 10 Juin 2010.
[8] E. Muljadi, C.P. Butterfield, Yih-Huei Wan, «Axial flux, modular, permanent-magnet
generator with a toroidal winding for wind turbine applications », IEEE industry applications
conférence, St Louis, november 5-8, 1998.
[9] F.Poitiers "étude et commande de génératrices asynchrones pour l'utilisation de l'énergie
éolienne" thèse de doctorat, l’Université de Nantes, 2003
[10] P. Leconte, M. Rapin, E. Szechenyi, "Eoliennes", Techniques de l’Ingénieur, traité de
Génie mécanique, pp. BM 4 640 1 - BM 4 640 21.
[11] O. De Vries "On the theory of the horizontal axis wind turbine", Ann. Rev. Fluid.
Mech.1983, 15, pp. 77-96.
[12] J.L. Menet L.-C. Valdès, B. Ménart, "A comparative calculation of the wind turbines
capacities on the basis of the L-σ criterion", Renewable Energy 22, 2001, pp. 491-506.
[13] S. Heier, "Grid Integration of Wind Energy Conversion Systems", Publications John
Wiley & Sons, ISBN 0-471-97143-X, 1998.
[14] A. D. Diop "Contribution au Développement d'un Simulateur Electromécanique
D’Aérogénérateurs : Simulation et Commande en Temps Réel d'une Turbine de Puissance
Moyenne à Angle de Calage Variable", Thèse de doctorat, Université du Havre, 8 juillet 1999.
[15] B. Multon, X. Roboam, B. Dakyo, C. Nichita, O. Gergaud, H. Ben Ahmed,
"Aérogénérateurs électriques", Techniques de l’ingénieur D3960, Novembre 2004
[16] O. Gergaud « Modélisation énergétique et optimisation économique d’un système de
production éolien et photovoltaïque couplé au réseau et associé à un accumulateur. »
Thèse. ENS de Cachan. Décembre 2002
[17] Tapia A. Tapia G. Ostolaza J.X. and Sienz J.R., “Modeling and
Control of a Wind Turbine Driven Doubly Fed Induction Generator,”
IEEE Transaction on energy conversion vol 18 N°. 2 June 2003 pp
[18] Djurovic Double feed Induction Generator with Two Pair of Poles Electrical Machines
and Drives 11-13 September 1995, Conference Publication N°412 TEE 1995.
103
[19] C. Kelber W. Schumacher “Adjustable Speed Constant Frequency Energy Generation
with Doubly-Fed Induction Machines”, VSSHy 2000. European Conference Variable Spee
in Small Hydro. Grenoble, France, 26-28 Jan. 2000.
[20] B. Hopfensperger, D. J. Atkinson, Douhly-fed a. c. machines : classification ami
comparison 9th European Conference on Power Electronics and Applications, 27- 29 Aout
2001, Graz, Autriche.
[21] G.Seguier, F. Notelet, Electrotechnique industrielle ‘, Editions technip 1990.
[22] J. Lesenne, F. Notelet, G.Séguier, ‘ Introduction à l’électrotechnique approfondie ‘,
Technique et documentation, Paris, 1981, ISBN 2-85206-089-2.
[23] Heir Grid Integration of Wind Energy Conversion Systems Publications John Whiel et
Sons ISBN 0-471-97143-X, 1998.
[24] T.Kriiger B.Anderson Advance control strategy for variable speed wind turbine
European Wind Energy Conference 2001 Copenhagen Denmark pp. 9R3-9R13. 198
[25] A. Boyette. « Contrôle-commande d’un générateur asynchrone à double alimentation
avec système de stockage pour la production d’énergie éolienne ». Thèse de doctorat,
Nancy I 2006.
[26] O. Chee-Mun. « Dynamic simulation of electric machinery using matlab/Simulink ».
Printice hall, 1998.
[27] I. Boldea. « Variable speed generators ». Taylor & Francis 2006.
[28] A. Nesba. « Caractérisation du phénomène de la saturation magnétique de la machine
asynchrone ». Thèse de doctorat d’état, ENP, 2007.
[29] R. KRISHNAN. « Electric motor drives modeling, analysis and control». Prentice Hall,
2001.
[30] D. AOUZELLAG, K. GHEDAMSI, E.M. BERKOUK. « Network power flux control of
a wind generator ». Renewable Energy, Volume 34, Issue 3, pp 615- 622, Elsevier 2009.
[31] N. P. QUANG, J.-A. DITTRICH. « Vector control of three-phase ac machines ».
Springer, 2008.
[32] K. GHEDAMSIA, D. AOUZELLAGA, E.M. BERKOUK. « Control of wind generator
associated to a flywheel energy storage system ». Renewable Energy, Volume 33, Issue
9, pp 2145-2156, Elsevier 2008.
[33] A. M. TRZYNADLOWSKI. « Control of induction motors ». Academic press, 2001.
[34] J.-P LOUIS, C. BERGMANN. « Commande numérique, régimes intermédiaires et
transitoires ». Techniques d’ingénieur D 3 643.
Résumé
ان اج ا ا ا ات ا (ادة .-, +* وا() و آ%$...)ا! ،ا
3 آ2 010 ا/ج 8 +ن ا7 اج ا -45 6 + ل .80 دود 9;(0
ا@?< ه8 ا/ ا/آ> ا61 / AB AاCا $D /ل اE F ا اج ا ا
G /ت ت اHوI2 اJا61 ل دا اف ا7Aم ا*Hح ه O اق >2 P ة- O اRS و ا@Q0 ا- T(ا ا
IGBT، GTO، IGCT،... A*+ Q % A R > ا?ي )MLI( 29ا ب - و ^Dا $D 9تa 62 ا و ^ bSJ a` ا
دود آ2 010 ا/ج
م هاآت - آة–دوج ا -.ا-ا
Résumé
La production de l’énergie électrique à partir des énergies renouvelable (éolien, solaire,….) connaît un grand essor. Pour que ces systèmes de production soient rentables, il faut optimiser toute la chaîne de production pour obtenir de bons rendements.
La machine asynchrone double alimentée est la machine la plus répandue dans le domaine de production d’énergie éolienne.
L’objectif du système proposé est d’utiliser dans les convertisseurs des composants électroniques de puissance commandables à l’ouverture et à la fermeture qui existent actuellement sur le marché tel que les IGBT, GTO, IGCT,…. Ce qui nous permet d’appliquer la modulation de largeur d’impulsion (MLI) pour la minimisation des harmoniques et l’amélioration du facteur de puissance dans le but d’optimiser et d’améliorer le rendement de toute la chaîne de conversion électrique.
Mots clés : Eolienne – MADA- modélisation– commande MLI-contrôle-puissance.
Abstract The production of electrical energy starting from renewable energies (wind, solar....) makes great rise. For these production systems are effective cost, we must optimize the entire production chain to obtain good returns. The double fed asynchronous machine is the most widespread machine in the field of wind energy production The objective of the proposed system is to use converters in the power electronics components ordered at the opening and closing currently on the market such as IGBT, GTO, IGCT,…. This allows us to apply the pulse-width modulation (PWM) for the minimization of harmonics and improving the power factor in order to optimize and improve the performance of the entire chain of electrical conversion. Key words: wind system – DFIG – modelling–MLI control-control–Power.


















