
LE DISPOSITIF ACADEMIQUE DE REMPLACEMENT POUR LE SECOND DEGRE

1
2
SOMMAIRE
INTRODUCTION
…….....................................................................… page : 5
PRE-REQUIS
Fonctions sinusoïdales - Outils de représentation et de calcul...........…………... page : 6 SYSTEMES A UN DEGRE DE LIBERTE I - DEFINITIONS
1 - Nombre de degrés de liberté.........................…...........................….....page : 11 2 - Systèmes conservatifs et non conservatifs...............................…........ page : 12 3 - Systèmes linéaires et non linéaires.............................................…….. page : 13 4 - Mouvements libres et forcés.......................................................…......page : 13 II - MOUVEMENTS LIBRES
1 - Système conservatif...................................................................….......page : 14
a - Expression de la loi du mouvement.......................................……page : 14 b - Interprétation énergétique.....................................................…… page : 16
b - 1 - Travail d'une force - Définitions des énergies.........................… page : 16 b - 2 - Transferts d'énergie - Système masse + ressort.......................… page : 18 b - 3 - Application au calcul d'une pulsation propre.............................. page : 19 b - 4 - Prise en compte de la masse du ressort................................…… page : 20
2 - Système avec frottement sec.........................................................…... page : 22
a - Expression de la loi du mouvement.......................................……page : 22 b - Interprétation énergétique.....................................................…… page : 24
3 - Système avec amortissement visqueux........................................….... page : 25
a - Expression de la loi du mouvement.......................................……page : 25 b - Interprétation énergétique.....................................................…… page : 27 III - MOUVEMENTS FORCES III.1 - LOIS D'EXCITATIONS SINUSOIDALES
1 - Système sans amortissement......................................................…...... page : 28 2 - Système avec amortissement visqueux........................................….... page : 33
a - Equation du mouvement........................................................……page : 33 b - Etude du régime transitoire...................................................….... page : 33 c - Etude du régime permanent................................................……...page : 35
c - 1 - Courbes de réponse en fréquence............................................…. page : 35 c - 2 - Pulsations de résonance et bande passante à - 3 dB..................... page : 38 c - 3 - Interprétation des variations d'amplitude et de phase.................. page : 40 c - 4 - Calcul de l'énergie dissipée par cycle.......................................... page : 41
3
3 - Système avec amortissement structural..................................……......page : 42
a - Introduction.....................................................................….......... page : 42 b - Définition du modèle d'amortissement structural.................…… page : 43 c - Courbes de réponse en fréquence........................................…….. page : 44
c - 1 - Expressions du gain et du déphasage......................................…. page : 44 c - 2 - Comparaison des effets d'amortissements visqueux et structural page : 47 c - 3 - Représentation dans le plan de Nyquist - Bande passante........... page : 48 c - 4 - Représentation des parties réelle et imaginaire............................ page : 50
4 - Application à l'isolation vibratoire.............................…....….............. page : 51
a - Isolation vibratoire du support.........................…....................…..page : 51 b - Isolation vibratoire de la masse...............................................….. page : 54
5 - Définitions et propriétés des courbes de réponse en fréquence............page : 56
QUE RETENIR DES PARAGRAPHES PRECEDENTS ?…………..….. page : 58 III.2 - LOIS D'EXCITATIONS AUTRES QUE SINUSOÏDALES
1 - Exemple de calcul par intégration : cas d'une excitation échelon..….. page : 59 2 - Bases des autres méthodes de calcul….....………………………....... page : 64
a - Limites du champ d'application.....................................................page : 64
a - 1 - Introduction.................................................................................. page : 64 a - 2 - Propriétés d'un système linéaire et invariant dans le temps......... page : 65
b - Résolution dans le domaine des fréquences..................….......... page : 66
b - 1 - Excitation somme de sinusoïdes - Principe de superposition..... page : 66 b - 2 - Excitation périodique - Décomposition en série de Fourier........ page : 67 ILLUSTRATION : Recomposition d’un signal périodique 68 APPLICATION : Expression de la relation entrée / sortie 70 b - 3 - Excitation de type impulsion - Transformée de Fourier............. page : 72 APPLICATION : Interprétation de la réponse à une impulsion 74 ILLUSTRATION : Recomposition de la réponse à une impulsion 77 COMPLEMENT : Spectre de choc 80 b - 4 - Excitation de type échelon - Transformée de Laplace............ page : 82
c - Résolution dans le domaine temporel……………...……..…............... page : 84
c - 1 - Définition de la réponse impulsionnelle d'un système.….…….... page : 84 c - 2 - Réponse impulsionnelle d'un système à un degré de liberté.….... page : 85 COMPLEMENT : Réponse impulsionnelle/réponse en fréquence 86 c - 3 - Produit de convolution……..…………………….....…….……....page : 88 ILLUSTRATION : Réponses à une impulsion et à un échelon 90 APPLICATION : Calcul de la réponse à un échelon instantané 92
QUE RETENIR DES PARAGRAPHES PRECEDENTS ?……............… page : 93

4
5
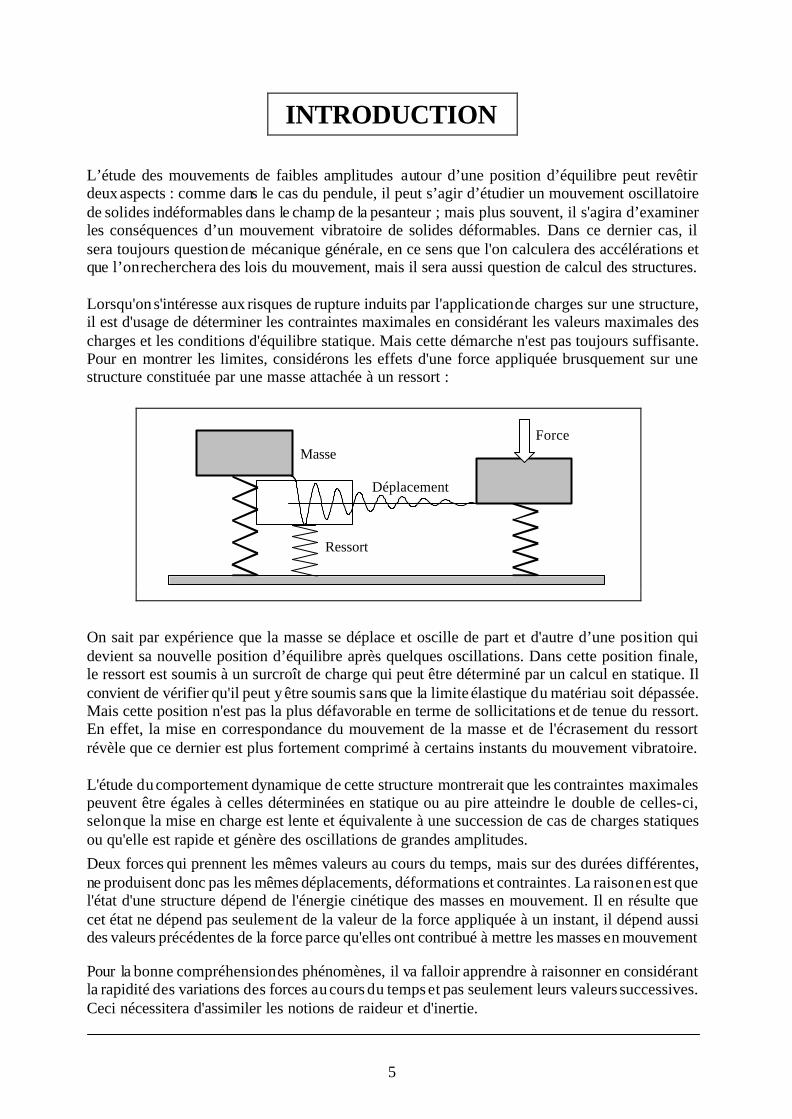
INTRODUCTION L’étude des mouvements de faibles amplitudes autour d’une position d’équilibre peut revêtir deux aspects : comme dans le cas du pendule, il peut s’agir d’étudier un mouvement oscillatoire de solides indéformables dans le champ de la pesanteur ; mais plus souvent, il s'agira d’examiner les conséquences d’un mouvement vibratoire de solides déformables. Dans ce dernier cas, il sera toujours question de mécanique générale, en ce sens que l'on calculera des accélérations et que l’on recherchera des lois du mouvement, mais il sera aussi question de calcul des structures. Lorsqu'on s'intéresse aux risques de rupture induits par l'application de charges sur une structure, il est d'usage de déterminer les contraintes maximales en considérant les valeurs maximales des charges et les conditions d'équilibre statique. Mais cette démarche n'est pas toujours suffisante. Pour en montrer les limites, considérons les effets d'une force appliquée brusquement sur une structure constituée par une masse attachée à un ressort :
Masse
Ressort
Déplacement
Force
On sait par expérience que la masse se déplace et oscille de part et d'autre d’une position qui devient sa nouvelle position d’équilibre après quelques oscillations. Dans cette position finale, le ressort est soumis à un surcroît de charge qui peut être déterminé par un calcul en statique. Il convient de vérifier qu'il peut y être soumis sans que la limite élastique du matériau soit dépassée. Mais cette position n'est pas la plus défavorable en terme de sollicitations et de tenue du ressort. En effet, la mise en correspondance du mouvement de la masse et de l'écrasement du ressort révèle que ce dernier est plus fortement comprimé à certains instants du mouvement vibratoire. L'étude du comportement dynamique de cette structure montrerait que les contraintes maximales peuvent être égales à celles déterminées en statique ou au pire atteindre le double de celles-ci, selon que la mise en charge est lente et équivalente à une succession de cas de charges statiques ou qu'elle est rapide et génère des oscillations de grandes amplitudes.
Deux forces qui prennent les mêmes valeurs au cours du temps, mais sur des durées différentes, ne produisent donc pas les mêmes déplacements, déformations et contraintes . La raison en est que l'état d'une structure dépend de l'énergie cinétique des masses en mouvement. Il en résulte que cet état ne dépend pas seulement de la valeur de la force appliquée à un instant, il dépend aussi des valeurs précédentes de la force parce qu'elles ont contribué à mettre les masses en mouvement Pour la bonne compréhension des phénomènes, il va falloir apprendre à raisonner en considérant la rapidité des variations des forces au cours du temps et pas seulement leurs valeurs successives. Ceci nécessitera d'assimiler les notions de raideur et d'inertie.
.
6
PRE-REQUIS Remarque : Le développement de la théorie nous amènera à résoudre des équations différentielles dont les solutions particulières sont des fonctions sinusoïdales. Nous supposerons que le lecteur est déjà familiarisé avec la démarche de résolution. La justification de celle-ci est du domaine des Mathématiques. Le lecteur néophyte en la matière devra l'admettre.
Nous ne rappelons dans ce qui suit, que les outils destinés au calcul de l'amplitude et de la phase d'une somme de fonctions sinusoïdales de pulsations égales. Graphe d'une fonction sinusoïdale
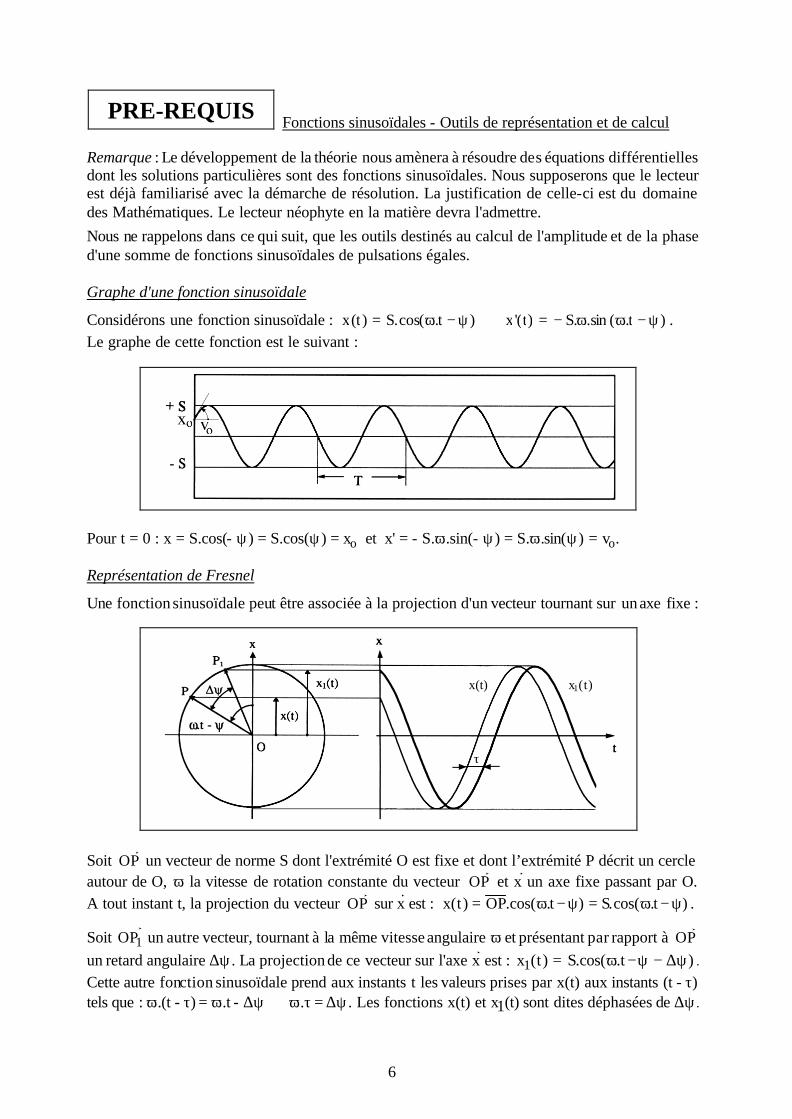
Considérons une fonction sinusoïdale : )t.(cos.S)t(x ψ−ω= ⇒ )t.(sin..S)t('x ψ−ωω−= . Le graphe de cette fonction est le suivant :
Pour t = 0 : x = S.cos(- ψ) = S.cos(ψ) = xo et x' = - S.ω.sin(- ψ) = S.ω.sin(ψ) = vo. Représentation de Fresnel
Une fonction sinusoïdale peut être associée à la projection d'un vecteur tournant sur un axe fixe :
Soit OP un vecteur de norme S dont l'extrémité O est fixe et dont l’extrémité P décrit un cercle
autour de O, ω la vitesse de rotation constante du vecteur OP et x un axe fixe passant par O. A tout instant t, la projection du vecteur OP sur x est : )t.cos(.S)t.cos(.OP)t(x ψ−ω=ψ−ω= .
Soit 1OP un autre vecteur, tournant à la même vitesse angulaire ω et présentant par rapport à OP un retard angulaire ∆ψ. La projection de ce vecteur sur l'axe x est : )t.cos(.S)t(x1 ψ∆−ψ−ω= . Cette autre fonction sinusoïdale prend aux instants t les valeurs prises par x(t) aux instants (t - τ) tels que : ω.(t - τ) = ω.t - ∆ψ ⇒ ω.τ = ∆ψ. Les fonctions x(t) et x1(t) sont dites déphasées de ∆ψ .
Fonctions sinusoïdales - Outils de représentation et de calcul
x(t) x1(t)
τ

7
Exemple d'application :
Afin d'illustrer l'utilisation de la représentation de Fresnel, établissons la relation :
)t.(sin.B)t.(cos.A ω+ω = ( ))A/B(Arctgt.cos.BA 22 −ω+
Sur le schéma ci-dessous :
- )t.(cos.A ω est la projection sur l'axe x d'un vecteur tournant OP de module A ,
- ( )2/t.cos.B)t.(sin.B π−ω=ω est la projection sur ce même axe d'un vecteur tournant OQ de module B et décalé de 2/π vers l'arrière par rapport à OP :
y
x
P
Q
R
S
ωψ
ω
x
v
.t
o
o
o
o
__
O
La composante suivant l'axe x du vecteur OR , somme des vecteurs OP et OQ , est à tout instant égale à la somme de leurs composantes )t.(cos.A ω et )t.(sin.B ω .
Or, comme les deux vecteurs OP et OQ tournent à la même vitesse ω, on peut affirmer que le
vecteur OR est un vecteur de module constant et qu’il tourne lui aussi à la vitesse angulaire ω. Sa composante )t.(cos.A ω + )t.(sin.B ω peut donc être exprimée sous la forme : S.cos(ω.t - ψ).
D'après la construction graphique : 22 BAS += et AB
tg =ψ . D'où la relation annoncée.
Remarques :
- Seuls les écarts angulaires entre les vecteurs sont utiles aux calculs. C’est la raison pour laquelle on construira la somme des vecteurs à l’instant t = 0 comme représenté ci-contre.
- L'équation Arctg(ψ) = B / A admet deux solutions
décalées de π . Le déphasage à retenir est celui qui vérifie : - pour ω.t = 0 : A = S.cos(ψ),
- pour ω.t = π / 2 : B = S.sin(ψ). Les signes de cos ψ et de sin ψ devront donc être respectivement les signes de A et de B.
x
y
A
BS
ψ
O
A
B

8
Notation complexe
Dès que l'on possède quelques pratiques de la représentation de Fresnel, il devient plus aisé de travailler sur les vecteurs plutôt que sur les expressions des fonctions sinusoïdales. Il apparaît aussi vite que les opérations effectuées se limitent à un faible nombre : l'addition, la dérivation, et que les raisonnements sont répétitifs au point qu'il n'est pas indispensable d'effectuer les tracés.
Pour cela, on associe à un vecteur tournant OR , de composantes S.cos(ω.t - ψ) et S.sin(ω.t - ψ), un nombre unique, noté S.cos(ω.t - ψ) + j.S.sin(ω.t - ψ) et qualifié de complexe.
Le facteur j permet de différencier la composante réelle portée par l'axe x qui correspond seule à la fonction sinusoïdale représentée, de la composante portée par l'axe y qui n'est là que pour les besoins de la représentation et qui est dite imaginaire . Réciproquement, à un nombre complexe x + j.y, on associe un vecteur tournant de module S et de phase ψ, donnés par les relations :
22 yxS += et xy
)t.(tg =ψ−ω .
____________________________________________________________________________ Les règles de calcul de l'algèbre des nombres complexes se déduisent des opérations effectuées sur les fonctions sinusoïdales dont ils sont le pendant. Prenons un exemple :
Soit S.cos(ω.t - ψ) + j.S.sin(ω.t - ψ) le nombre complexe associé à la fonction : S.cos(ω.t - ψ). Considérons la fonction : S.cos(ω.t - ψ + π / 2) qui en est déduite par un déphasage de + π / 2. Le nombre complexe associé à cette dernière est : S.cos(ω.t - ψ + π / 2) + j.S.sin(ω.t - ψ + π / 2). On montrerait qu'il est égal à : - S.sin(ω.t - ψ) + j.S.cos(ω.t - ψ). Les relations trigonométriques sont connues, cependant on évitera d'y faire à nouveau appel, si l'on pose symboliquement j2 = -1 et si l'on écrit que le nombre complexe obtenu est égal au précédent multiplié par j. La condition j2 = -1 peut être déconcertante. Mais elle est en accord avec le fait que deux déphasages successifs de π / 2 ont pour seul effet de changer le signe des composantes du vecteur tournant : j.(- S.sin(ω.t - ψ) + j.S.cos(ω.t - ψ)) = - S.cos(ω.t - ψ) - j.S.sin(ω.t - ψ).
Axe réel
Axe imaginaire
A chacune des opérations portant sur des fonctions sinusoïdales correspond une opération sur les nombres complexes associés. Les mathématiciens ont démontré que les règles du calcul complexe ne se différenciaient pas des règles de l'algèbre ordinaire. Par ailleurs, ils ont établi que l'on pouvait condenser l'écriture des calculs grâce à l'équivalence :
)t..(je.S)t.(sin.S.j)t.(cos.S ψ−ω=ψ−ω+ψ−ω ou ( )x/yArctg.j22 e.yxy.jx +=+ . Nous reprendrons ces résultats. ____________________________________________________________________________

9
Exemple d'application :
La notation en exponentielle complexe se révèle particulièrement performante lorsque les calculs comportent des opérations de dérivation. Imaginons par exemple que l’on cherche à évaluer l’expression : A.x + B.x’ + C.x" dans laquelle x est une fonction sinusoïdale : x(t) = a.cos(ω.t). • Les dérivées de la fonction x sont : x’(t) = - a.ω.sin(ω.t) et x"(t) = - a.ω2.cos(ω.t). Les fonctions x, x' et x" sont des fonctions sinusoïdales de même pulsation. D'après la représentation de Fresnel la somme A.x + B.x’ + C.x" est donc une fonction sinusoïdale.
L'amplitude et la phase de cette dernière peuvent être déterminées directement à partir de x(t). Lorsqu’on reporte les expressions de x, x’ et x", on obtient :
A.x + B.x’ + C.x" = a. ( ))t.sin(..B)t.cos()..CA( 2 ωω−ωω− . Il suffit alors de regrouper les termes en sinus et cosinus, pour écrire ce résultat sous la forme :
ω−
ω−−ωω+ω− 2
222.CA.B
Artgt.cos.).B().CA(.a .
• Lorsqu'on utilise la notation complexe, on fait porter les calculs sur l'exponentielle complexe associée à la fonction x(t) :
a.cos(ω.t) ↔ a.cos(ω.t) + j.a.sin(ω.t) = t..je.a ω .
On écrit dans ce cas : A.x + B.x’ + C.x" ↔ ( ) ( ) ( )t..j22t..jt..j e.a..j.Ce.a..j.Be.a.A ωωω ω+ω+ .
On en déduit : A.x + B.x’ + C.x" ↔ ( )ω+ω−ω .B.j).CA(.e.a 2t..j . On extrait ensuite l'amplitude et la phase du résultat complexe en suivant les règles d'équivalence qui ont été rappelées. Ce résultat prend la forme :
ω+ω−
ω−
ω
ω 2.CA
.BArctg.j222t..j e.).B().CA(.e.a
=
ω−
ω+ωω+ω−
2.CA
.BArctgt..j222 e.).B().CA(.a .
Sa composante réelle est :
ω−
ω+ωω+ω− 2
222.CA
.BArctgt.cos.).B().CA(.a .
Notons que l'écriture des calculs en complexes paraît ici plus lourde que celle des calculs en x. Il faudrait que les calculs soient plus nombreux pour découvrir l'intérêt de la notation complexe.
____________________________________________________________________________

10
11
SYSTEMES A UN DEGRE DE LIBERTE Nous attacherons beaucoup d’importance à l'étude des systèmes à un degré de liberté, car bien que ce soient les systèmes les plus simples, ils permettent d'introduire la plupart des notions nécessaires à la description des phénomènes vibratoires. I - DEFINITIONS 1 - Nombre de degrés de liberté On dit qu'un système mécanique possède un seul degré de liberté, lorsque les positions de toutes les masses qui le composent sont déterminées par l'une d'elles.
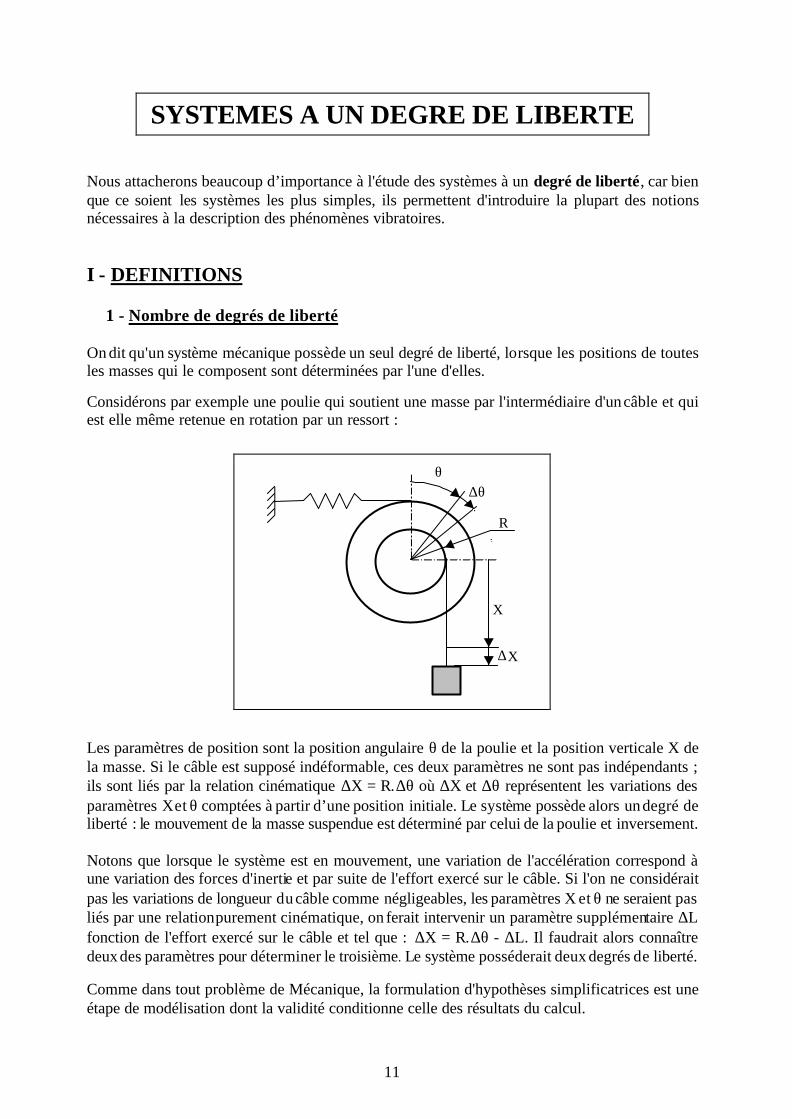
Considérons par exemple une poulie qui soutient une masse par l'intermédiaire d'un câble et qui est elle même retenue en rotation par un ressort :
R
∆
∆θ θ
X
X
Les paramètres de position sont la position angulaire θ de la poulie et la position verticale X de la masse. Si le câble est supposé indéformable, ces deux paramètres ne sont pas indépendants ; ils sont liés par la relation cinématique ∆X = R.∆θ où ∆X et ∆θ représentent les variations des
paramètres X et θ comptées à partir d’une position initiale. Le système possède alors un degré de liberté : le mouvement de la masse suspendue est déterminé par celui de la poulie et inversement. Notons que lorsque le système est en mouvement, une variation de l'accélération correspond à une variation des forces d'inertie et par suite de l'effort exercé sur le câble. Si l'on ne considérait pas les variations de longueur du câble comme négligeables, les paramètres X et θ ne seraient pas liés par une relation purement cinématique, on ferait intervenir un paramètre supplémentaire ∆L fonction de l'effort exercé sur le câble et tel que : ∆X = R.∆θ - ∆L. Il faudrait alors connaître deux des paramètres pour déterminer le troisième. Le système posséderait deux degrés de liberté. Comme dans tout problème de Mécanique, la formulation d'hypothèses simplificatrices est une étape de modélisation dont la validité conditionne celle des résultats du calcul.
12
2 - Systèmes conservatifs et non conservatifs Un système est dit non conservatif lorsque son mouvement s'accompagne d'une perte d’énergie. On examinera trois types de phénomènes dissipatifs :
- le frottement de glissement :
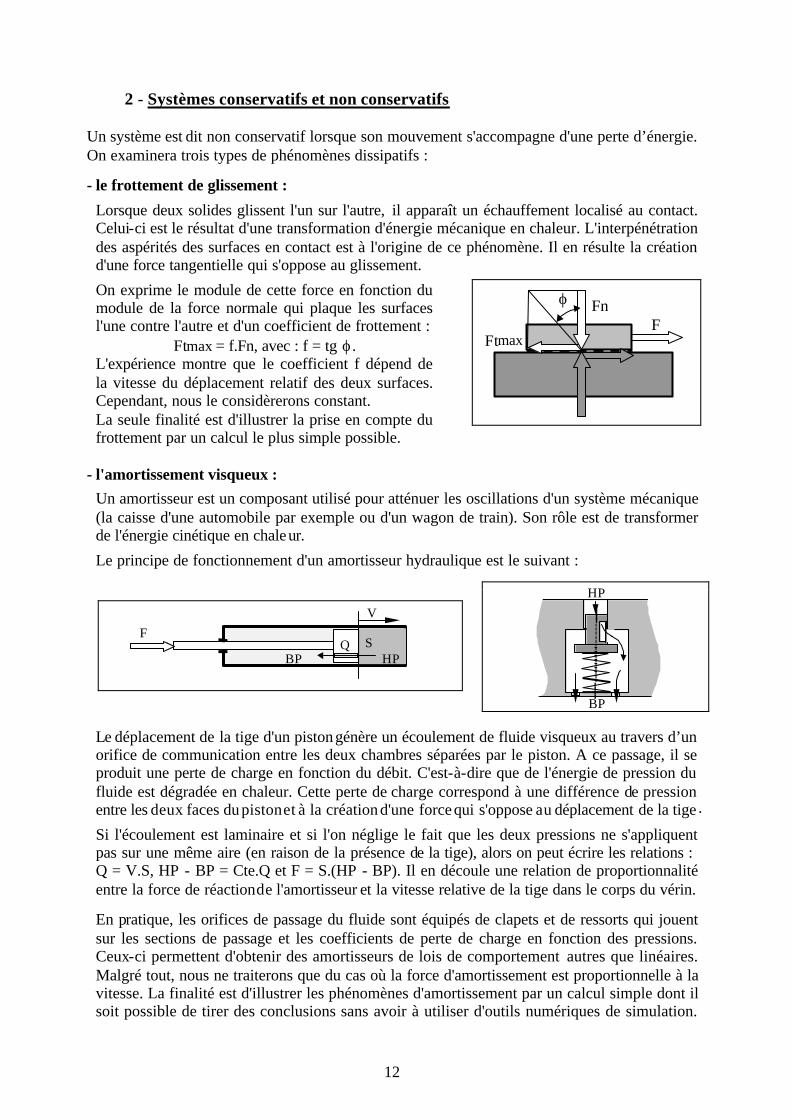
Lorsque deux solides glissent l'un sur l'autre, il apparaît un échauffement localisé au contact. Celui-ci est le résultat d'une transformation d'énergie mécanique en chaleur. L'interpénétration des aspérités des surfaces en contact est à l'origine de ce phénomène. Il en résulte la création d'une force tangentielle qui s'oppose au glissement.
On exprime le module de cette force en fonction du module de la force normale qui plaque les surfaces l'une contre l'autre et d'un coefficient de frottement :
Ftmax = f.Fn, avec : f = tg ϕ. L'expérience montre que le coefficient f dépend de la vitesse du déplacement relatif des deux surfaces. Cependant, nous le considèrerons constant. La seule finalité est d'illustrer la prise en compte du frottement par un calcul le plus simple possible.
Fn
FtmaxF
ϕ
- l'amortissement visqueux :
Un amortisseur est un composant utilisé pour atténuer les oscillations d'un système mécanique (la caisse d'une automobile par exemple ou d'un wagon de train). Son rôle est de transformer de l'énergie cinétique en chaleur.
Le principe de fonctionnement d'un amortisseur hydraulique est le suivant :
HP BP Q
F V
S
BP
HP
Le déplacement de la tige d'un piston génère un écoulement de fluide visqueux au travers d’un orifice de communication entre les deux chambres séparées par le piston. A ce passage, il se produit une perte de charge en fonction du débit. C'est-à-dire que de l'énergie de pression du fluide est dégradée en chaleur. Cette perte de charge correspond à une différence de pression entre les deux faces du piston et à la création d'une force qui s'oppose au déplacement de la tige
Si l'écoulement est laminaire et si l'on néglige le fait que les deux pressions ne s'appliquent pas sur une même aire (en raison de la présence de la tige), alors on peut écrire les relations : Q = V.S, HP - BP = Cte.Q et F = S.(HP - BP). Il en découle une relation de proportionnalité entre la force de réaction de l'amortisseur et la vitesse relative de la tige dans le corps du vérin.
En pratique, les orifices de passage du fluide sont équipés de clapets et de ressorts qui jouent sur les sections de passage et les coefficients de perte de charge en fonction des pressions. Ceux-ci permettent d'obtenir des amortisseurs de lois de comportement autres que linéaires. Malgré tout, nous ne traiterons que du cas où la force d'amortissement est proportionnelle à la vitesse. La finalité est d'illustrer les phénomènes d'amortissement par un calcul simple dont il soit possible de tirer des conclusions sans avoir à utiliser d'outils numériques de simulation.
.

13
- l'amortissement interne des matériaux :
Cet amortissement traduit la perte d’énergie qui est constatée lorsqu’on déforme un matériau élastique. Une partie de l'énergie de déformation est dégradée en chaleur et n’est pas restituée lorsque le matériau reprend sa forme initiale. L'étude de cette dissipation d'énergie sera utile à la description des caractéristiques des suspensions élastiques qui jouent un double rôle de ressort et d'amortisseur.
3 - Systèmes linéaires et non linéaires Une des raisons pour lesquelles nous ne considérerons qu'une force de frottement de module constant ou une force d'amortissement de module proportionnel à une vitesse, est le choix de ne traiter que de systèmes linéaires. Il existe pour ces systèmes des méthodes d'études analytiques, numériques et expérimentales, simples dans leurs principes et cependant performantes, basées sur l'application du principe de superposition. Ces méthodes sont largement utilisées dans de nombreux domaines techniques. Il importe donc de les connaître. L'usage répandu des outils d'analyse des systèmes linéaires ne doit pas faire oublier que la plupart des systèmes sont non linéaires et que l'hypothèse de linéarité n'est le plus souvent acceptable que pour de petites amplitudes du mouvement vibratoire.
Considérons par exemple le cas d'un ressort hélicoïdal : d'après l'expérience, l'effort que le ressort oppose à un déplacement relatif de ses extrémités croît en proportion du déplacement tant que le déplacement reste faible, puis il augmente fortement lorsque les déformations du ressort sont plus importantes. Ce n'est pas la loi de comportement du matériau qui est à l'origine de cette non linéarité. C'est la relation entre les contraintes produites par la force et la géométrie du ressort. Lorsque le ressort subit des déformations élastiques, les effets de la force s'en trouvent modifiés. Ce phénomène n'est négligeable que pour de faibles charges. L'effort que le ressort opposera au déplacement d'une masse liée à son extrémité ne sera donc proportionnel au déplacement relatif de ses extrémités que sur une plage de déformation. Sur cette plage, sa raideur k sera constante et l'on pourra appliquer le principe de superposition. Ce ne sera pas vrai en dehors.
F
H H + δ
F
δ = δ1 + δ2
F = k. δ
0 δ1 δ2
F1 F2
F ≠ F1 + F2 = F1 + F2
δ
Plage de linéarité 4 - Mouvements libres et forcés On appelle mouvement libre, un mouvement du système non soumis à l'action de force extérieure autres que les forces de pesanteur. On observera un mouvement libre lorsque le système sera abandonné à lui même après qu'il ait été écarté de sa position d’équilibre statique ou lorsqu'il cessera d'être soumis à l'action d'une force extérieure qui l'aura mis en mouvement. Ce sont les propriétés de masse, de raideur et d'amortissement qui détermineront ce mouvement, en fonction des conditions du mouvement à l'instant où le système sera livré à lui même.
On appelle mouvement forcé, un mouvement du système soumis à l'action de forces extérieures.

14
II - MOUVEMENTS LIBRES
1 - Système conservatif
a - Expression de la loi du mouvement Considérons un système constitué par une masse, guidée en translation par une glissière verticale, et un ressort de rappel :
δ
δs x
m
k H
g
+
Soit m la valeur de la masse, k celle de la raideur du ressort et H la hauteur à vide du ressort.
Sous l'effet du poids de la masse, le ressort est écrasé. Il présente une diminution de hauteur δs donnée par la condition d'équilibre des forces : k.δs = m.g, où g est l’accélération de la pesanteur. On en déduit la position d'équilibre statique de la masse.
On repère la position de la masse en mouvement par une cote δ(t) ou x(t). L'origine de la cote δ est la position que la masse occupe lorsque la hauteur du ressort est égale à sa hauteur à vide. Cette origine permet d'exprimer l'effort exercé par le ressort en proportion du déplacement de la masse. La cote x est prise par rapport à la position d'équilibre statique de la masse. Le choix de cette origine devrait révéler que le mouvement vibratoire de la masse est centré sur sa position de repos. La différence entre les deux paramètres δ et x correspond à l'écrasement δs du ressort. Les axes δ et x sont tous deux orientés en positif en sens contraire des forces de pesanteur. Si l'écart δs est exprimé en positif, alors les paramètres δ et x sont liés par la relation de décalage :
δ = x - δs. Le principe fondamental de la dynamique s'écrit : ∑ δ= ".mForces .
Les forces extérieures à la masse isolée sont :
- la force de pesanteur : - m.g (de sens opposé au sens considéré positif), - la force de rappel du ressort : - k.δ (de sens toujours opposé au sens du déplacement).
L'équation du mouvement libre est donc : ".m.kg.m δ=δ−− .
Lorsqu'on effectue le changement d'origine δ = x - δs, celle-ci devient : "x.mx.k.kg.m s =−δ+− Or, d'après l'équation d'équilibre statique : k.δs = m.g. Après simplifications, il reste finalement :
"x.mx.k =− .
L'accélération de la pesanteur n'apparaît plus dans cette équation. Un premier résultat est que le mouvement libre est ici déterminé par l'inertie de la masse et non par son poids propre. La valeur du poids détermine une position d'équilibre statique mais à tous instants son effet est compensé par une précontrainte du ressort, de sorte qu'il ne joue aucun rôle dans le mouvement vibratoire.
.

15
Posons : 2
om/k ω= . L’équation différentielle du mouvement prend la forme : 0x."x 2o =ω+ .
La solution générale de cette équation est une combinaison linéaire de fonctions cosinus et sinus
:
)t.(sin.B)t.(cos.Ax oo ω+ω= , avec A et B deux constantes. Les valeurs de ces dernières sont déterminées par des conditions imposées au mouvement libre.
Prenons comme origine des temps, l'instant où le système écarté de sa position d'équilibre ou en mouvement forcé est livré à lui-même. Soit xo la position de la masse et vo sa vitesse à cet
instant. Les deux conditions : à t = 0, x = xo et x' = vo donnent : A = xo et B.ωo = vo. On obtient au final :
)t.(sin.v
)t.(cos.xx oo
ooo ω
ω+ω=
On a démontré que le résultat d'une somme de fonctions sinusoïdales de pulsations égales est une fonction sinusoïdale. Une autre forme de la loi du mouvement est donc : x = )t.(cos.S o ψ−ω . Les paramètres S et ψ sont extraits par identification de l’égalité des expressions :
)t.(cos.S o ψ−ω = ψω+ψω sin.)t.(sin.Scos.)t.(cos.S oo = )t.(sin.v
)t.(cos.x oo
ooo ω
ω+ω .
Pour que cette égalité soit vérifiée à tout instant, il faut que : S.cos ψ = xo et S.sin ψ = vo / ωo. On en tire :
2o
2o2
o2222 v
xsin.Scos.Sω
+=ψ+ψ et oo
ox.
vcos.Ssin.S
ω=
ψψ
.
En conclusion :
Le mouvement libre du système étudié est un mouvement sinusoïdal de la forme :
)t.(cos.Sx o ψ−ω=
avec :
mk
o =ω 2o
2o2
ov
xSω
+= et oo
o.x
vtg
ω=ψ
____________________________________________________________________________
Remarques :
- La position et la vitesse de la masse reprennent les mêmes valeurs à chaque fois que le temps t
s'accroît d'une durée To telle que : ωo.(t + To) = ωo.t + 2.π . La durée To = 2.π / ωo est la période du mouvement. Le nombre de périodes sur une durée d'une seconde représente sa fréquence νo. D'après sa définition, la fréquence est égale à l'inverse de la période. Enfin ωo = 2.π / To = 2.π .νo est appelée la pulsation du mouvement.
- Quelles que soient les conditions initiales du mouvement, le mouvement libre du système étudié est sinusoïdal et de pulsation ωo. La pulsation ωo n'est fonction que de propriétés d'inertie et de raideur, intrinsèques au système. C'est pourquoi on l'appelle pulsation propre . Nous verrons l'importance qu'il y a à connaître cette pulsation lors de l'étude du mouvement forcé .
____________________________________________________________________________
16
b - Interprétation énergétique
b - 1 - Travail d'une force - Définitions des énergies
Travail d'une force
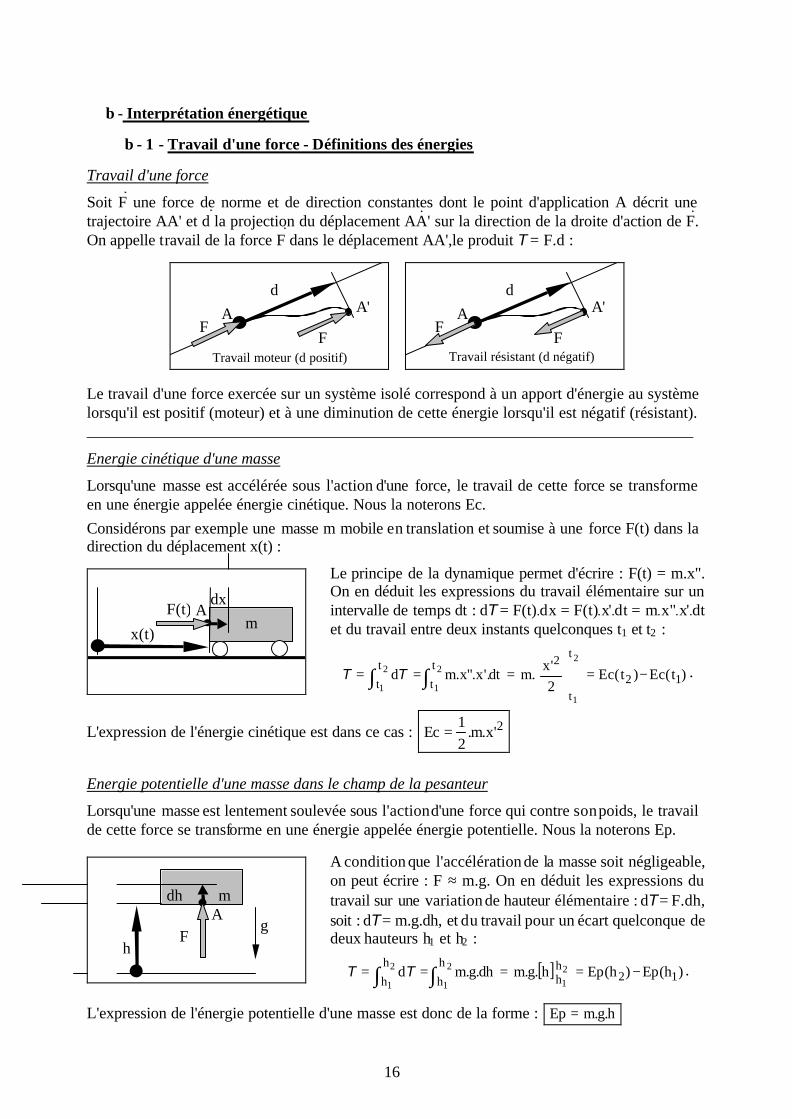
Soit F une force de norme et de direction constantes dont le point d'application A décrit une trajectoire AA' et d la projection du déplacement AA' sur la direction de la droite d'action de F. On appelle travail de la force F dans le déplacement AA',le produit T = F.d :
F F
d A A'
Travail moteur (d positif)
F F
d A A'
Travail résistant (d négatif) Le travail d'une force exercée sur un système isolé correspond à un apport d'énergie au système lorsqu'il est positif (moteur) et à une diminution de cette énergie lorsqu'il est négatif (résistant). ____________________________________________________________________________
Energie cinétique d'une masse
Lorsqu'une masse est accélérée sous l'action d'une force, le travail de cette force se transforme en une énergie appelée énergie cinétique. Nous la noterons Ec.
Considérons par exemple une masse m mobile en translation et soumise à une force F(t) dans la direction du déplacement x(t) :
F(t) A m
x(t)
dx
Le principe de la dynamique permet d'écrire : F(t) = m.x". On en déduit les expressions du travail élémentaire sur un intervalle de temps dt : dT = F(t).dx = F(t).x'.dt = m.x".x'.dt et du travail entre deux instants quelconques t1 et t2 :
)t(Ec)t(Ec2'x
.mdt'.x".x.md 12t
t
t
t
2t
t2
1
2
1
2
1−=
=== ∫ ∫TT .
L'expression de l'énergie cinétique est dans ce cas : 2'x.m.21
Ec =
Energie potentielle d'une masse dans le champ de la pesanteur
Lorsqu'une masse est lentement soulevée sous l'action d'une force qui contre son poids, le travail de cette force se transforme en une énergie appelée énergie potentielle. Nous la noterons Ep.
F h
m dh A
g
A condition que l'accélération de la masse soit négligeable, on peut écrire : F ≈ m.g. On en déduit les expressions du travail sur une variation de hauteur élémentaire : dT = F.dh, soit : dT = m.g.dh, et du travail pour un écart quelconque de deux hauteurs h1 et h2 :
[ ] )h(Ep)h(Eph.g.mdh.g.md 12h
hhh
h
h2
1
21
2
1−==== ∫ ∫TT .
L'expression de l'énergie potentielle d'une masse est donc de la forme : h.g.mEp =
17
__________________________________________________________________________________________
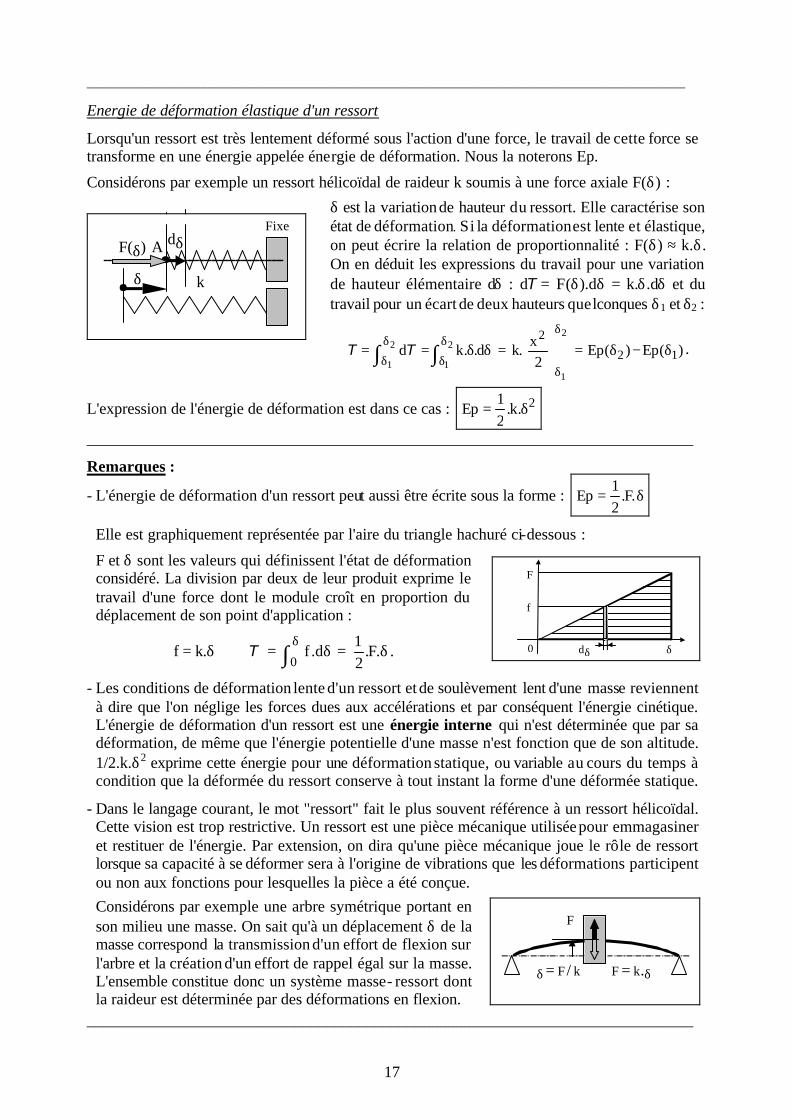
Energie de déformation élastique d'un ressort
Lorsqu'un ressort est très lentement déformé sous l'action d'une force, le travail de cette force se transforme en une énergie appelée énergie de déformation. Nous la noterons Ep.
Considérons par exemple un ressort hélicoïdal de raideur k soumis à une force axiale F(δ) :
F(δ)
k
dδ
δ
A Fixe
δ est la variation de hauteur du ressort. Elle caractérise son état de déformation. Si la déformation est lente et élastique, on peut écrire la relation de proportionnalité : F(δ) ≈ k.δ. On en déduit les expressions du travail pour une variation de hauteur élémentaire dδ : dT = F(δ).dδ = k.δ.dδ et du
travail pour un écart de deux hauteurs quelconques δ1 et δ2 :
)(Ep)(Ep2
x.kd..kd 12
22
1
2
1
2
1δ−δ=
=δδ== ∫ ∫
δ
δ
δ
δ
δ
δTT .
L'expression de l'énergie de déformation est dans ce cas : 2.k.21
Ep δ=
____________________________________________________________________________
Remarques :
- L'énergie de déformation d'un ressort peut aussi être écrite sous la forme : δ= .F.21
Ep
Elle est graphiquement représentée par l'aire du triangle hachuré ci-dessous :
F et δ sont les valeurs qui définissent l'état de déformation considéré. La division par deux de leur produit exprime le travail d'une force dont le module croît en proportion du déplacement de son point d'application :
f = k.δ ⇒ δ=δ= ∫δ
.F.21
d.f0
T .
F
f
0 δ dδ
- Les conditions de déformation lente d'un ressort et de soulèvement lent d'une masse reviennent à dire que l'on néglige les forces dues aux accélérations et par conséquent l'énergie cinétique. L'énergie de déformation d'un ressort est une énergie interne qui n'est déterminée que par sa déformation, de même que l'énergie potentielle d'une masse n'est fonction que de son altitude. 1/2.k.δ2 exprime cette énergie pour une déformation statique, ou variable au cours du temps à condition que la déformée du ressort conserve à tout instant la forme d'une déformée statique.
- Dans le langage courant, le mot "ressort" fait le plus souvent référence à un ressort hélicoïdal. Cette vision est trop restrictive. Un ressort est une pièce mécanique utilisée pour emmagasiner et restituer de l'énergie. Par extension, on dira qu'une pièce mécanique joue le rôle de ressort lorsque sa capacité à se déformer sera à l'origine de vibrations que les déformations participent ou non aux fonctions pour lesquelles la pièce a été conçue.
Considérons par exemple une arbre symétrique portant en
son milieu une masse. On sait qu'à un déplacement δ de la masse correspond la transmission d'un effort de flexion sur
l'arbre et la création d'un effort de rappel égal sur la masse. L'ensemble constitue donc un système masse - ressort dont la raideur est déterminée par des déformations en flexion.
δ = F / k F = k.δ
F
⇒
____________________________________________________________________________

18
b - 2 - Transferts d'énergie - Système masse - ressort Le schéma reporté ci-dessous représente une masse, placée dans le champ de la pesanteur, mobile et soumise à un effort de rappel exercé par un ressort :
δ
δs x
H
g
+
k.δ
m
L'expression de la force exercée par le ressort est : - k.δ. D'après l'équation du mouvement, cette force est égale à m.g + m.δ". Elle contre le poids et accélère ou freine le mouvement de la masse.
Soit δ1, δ2 les positions de la masse à deux instants t1, t2 et δ '1, δ '2 les vitesses correspondantes. Lorsqu'on exprime le travail de la force exercée par le ressort, l'égalité - k.δ = m.g + m.δ " conduit à la relation :
Notons que l'on pourrait aussi écrire que la force qui accélère ou freine le mouvement de la masse est la résultante de son poids et de l'effort exercée par le ressort. On partirait dans ce cas de l'égalité m.δ " = - k.δ - m.g. Elle conduirait évidemment à la même relation. De façon plus systématique, on écrira l'équation du mouvement sous la forme : m.δ" + k.δ + m.g = 0.
On en déduit : 0d.g.md..kd"..m 2
1
2
1
2
1
t
t
t
t
t
t=δ+δδ+δδ ∫∫∫ .
4 ∫ δ−δ=δδ2
1
t
t
2'1
2'2 ).(m.
21
d"..m représente la variation de l'énergie cinétique de la masse,
4 ).(k.21
d..k 21
22
t
t2
1δ−δ=δδ∫ correspond à la variation de l'énergie de déformation du ressort,
4 ).(g.md.g.m 12t
t2
1δ−δ=δ∫ est la variation de l'énergie potentielle de la masse.
La somme de ces trois variations est nulle, ce qui signifie que l'énergie du système masse + ressort est constante au cours du temps. Cette propriété est celle d'un système conservatif. ___________________________________________________________________________________________
Dans le cas du système repris ci-dessus, nous avons montré l'intérêt d'adopter comme paramètre du mouvement la cote x par rapport à la position d'équilibre statique. Introduisons ce paramètre.
Alors : sx11 δ−=δ et sx22 δ−=δ ⇒ )xx()( 1212 −=δ−δ et 11 'x' =δ , 22 'x' =δ ,
)xx.(s.2)xx()s.2xx).(xx()).(()( 122
12
2121212122
12
2 −δ−−=δ−+−=δ+δδ−δ=δ−δ .
On en déduit la relation : 0)xx.(g.m)xx.(s.k)xx.(k.21
)xx.(m.21
12122
12
22'
12'
2 =−+−δ−−+− .
Or : k.δs = m.g ; les deux derniers termes se compensent. On pourra donc ignorer l'existence de la pesanteur lorsqu'on exprimera les transferts d'énergie associés aux vibrations d'un tel système.
∫∫∫ δδ+δ=δδ− 2
1
2
1
2
1
t
t
t
t
t
td"..md.g.md..k
19
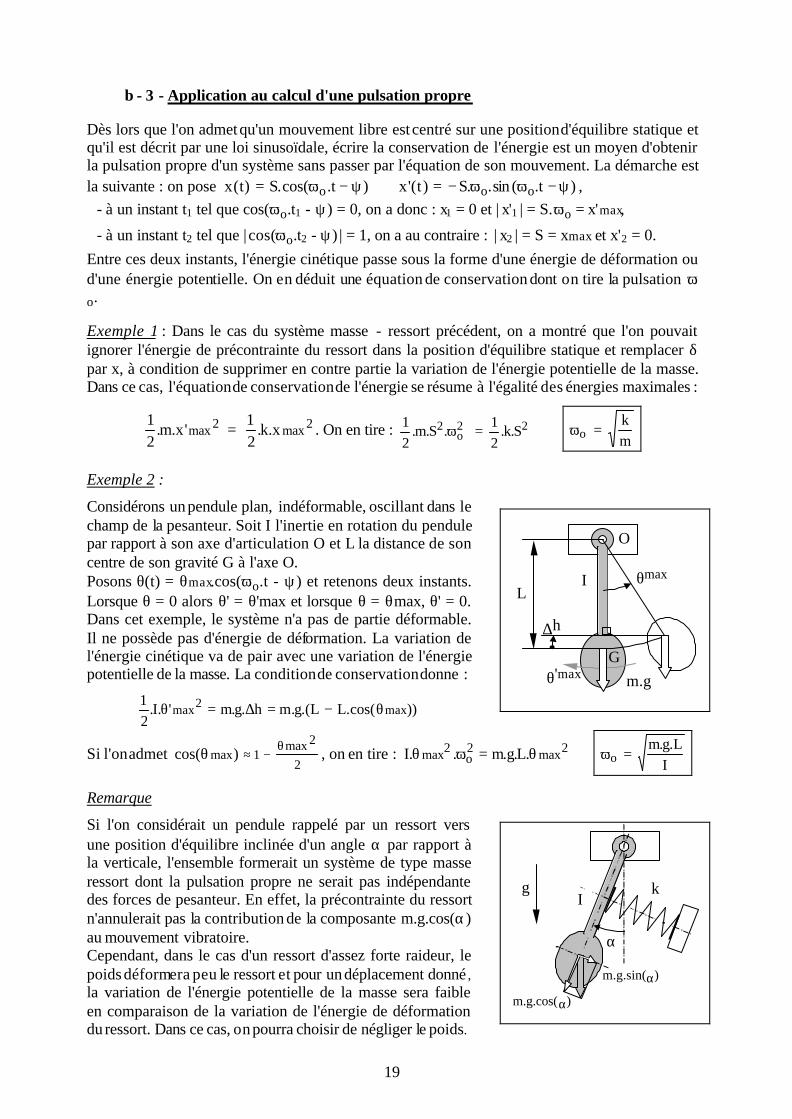
b - 3 - Application au calcul d'une pulsation propre Dès lors que l'on admet qu'un mouvement libre est centré sur une position d'équilibre statique et qu'il est décrit par une loi sinusoïdale, écrire la conservation de l'énergie est un moyen d'obtenir la pulsation propre d'un système sans passer par l'équation de son mouvement. La démarche est la suivante : on pose )t.(cos.S)t(x o ψ−ω= ⇒ )t.(sin..S)t('x oo ψ−ωω−= ,
- à un instant t1 tel que cos(ωo.t1 - ψ) = 0, on a donc : x1 = 0 et | x'1 | = S.ωo = x'max,
- à un instant t2 tel que | cos(ωo.t2 - ψ) | = 1, on a au contraire : | x2 | = S = xmax et x'2 = 0.
Entre ces deux instants, l'énergie cinétique passe sous la forme d'une énergie de déformation ou d'une énergie potentielle. On en déduit une équation de conservation dont on tire la pulsation ωo. Exemple 1 : Dans le cas du système masse - ressort précédent, on a montré que l'on pouvait ignorer l'énergie de précontrainte du ressort dans la position d'équilibre statique et remplacer δ par x, à condition de supprimer en contre partie la variation de l'énergie potentielle de la masse. Dans ce cas, l'équation de conservation de l'énergie se résume à l'égalité des énergies maximales :
2max2max x.k.21
'x.m.21
= . On en tire : 22o
2 S.k.21
.S.m.21 =ω ⇒
mk
o =ω
Exemple 2 :
Considérons un pendule plan, indéformable, oscillant dans le champ de la pesanteur. Soit I l'inertie en rotation du pendule par rapport à son axe d'articulation O et L la distance de son centre de son gravité G à l'axe O. Posons θ(t) = θmax.cos(ωo.t - ψ) et retenons deux instants. Lorsque θ = 0 alors θ' = θ'max et lorsque θ = θmax, θ' = 0. Dans cet exemple, le système n'a pas de partie déformable. Il ne possède pas d'énergie de déformation. La variation de l'énergie cinétique va de pair avec une variation de l'énergie potentielle de la masse. La condition de conservation donne :
))cos(.LL.(g.mh.g.m'.I.21
max2max θ−=∆=θ
L
G
θmax
O
I
m.g θ'max
∆h
Si l'on admet 2
2max1max)cos( θ
−≈θ , on en tire : 2max2o
2max .L.g.m..I θ=ωθ ⇒ I
L.g.mo =ω
Remarque
Si l'on considérait un pendule rappelé par un ressort vers une position d'équilibre inclinée d'un angle α par rapport à la verticale, l'ensemble formerait un système de type masse ressort dont la pulsation propre ne serait pas indépendante des forces de pesanteur. En effet, la précontrainte du ressort n'annulerait pas la contribution de la composante m.g.cos(α) au mouvement vibratoire. Cependant, dans le cas d'un ressort d'assez forte raideur, le poids déformera peu le ressort et pour un déplacement donné , la variation de l'énergie potentielle de la masse sera faible en comparaison de la variation de l'énergie de déformation du ressort. Dans ce cas, on pourra choisir de négliger le poids.
k
α
I
m.g.cos(α)
m.g.sin(α)
g
20
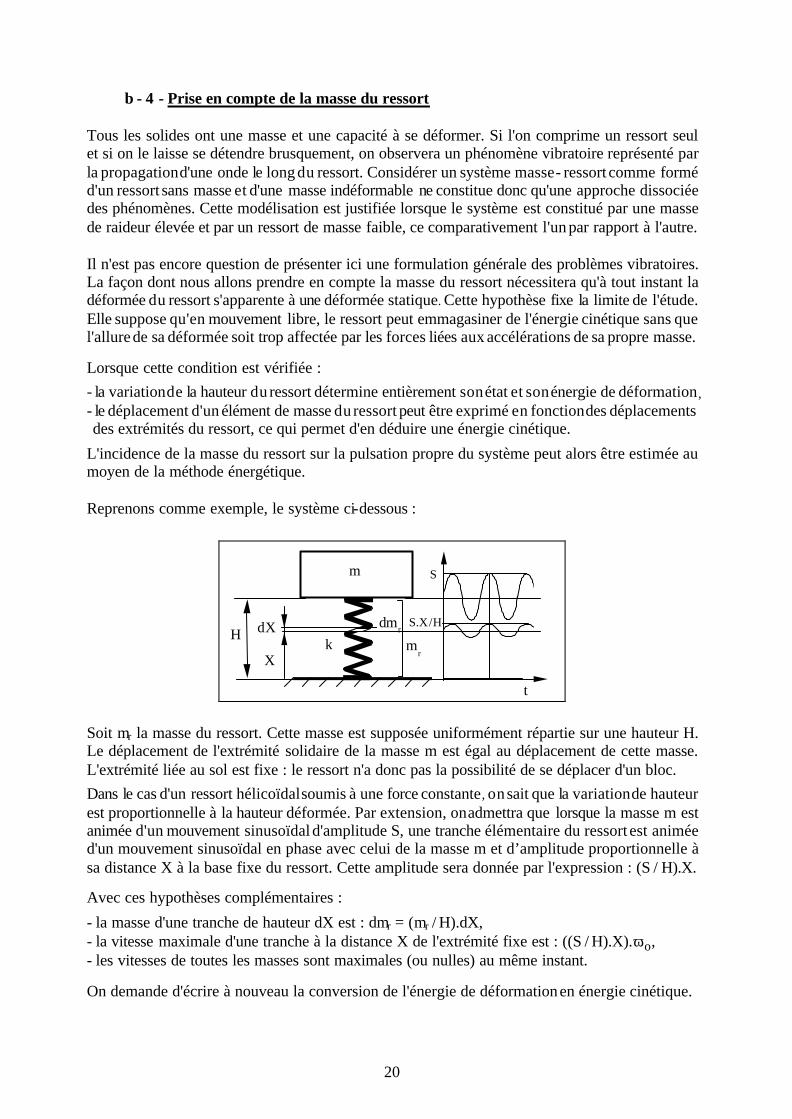
b - 4 - Prise en compte de la masse du ressort Tous les solides ont une masse et une capacité à se déformer. Si l'on comprime un ressort seul et si on le laisse se détendre brusquement, on observera un phénomène vibratoire représenté par la propagation d'une onde le long du ressort. Considérer un système masse - ressort comme formé d'un ressort sans masse et d'une masse indéformable ne constitue donc qu'une approche dissociée des phénomènes. Cette modélisation est justifiée lorsque le système est constitué par une masse de raideur élevée et par un ressort de masse faible, ce comparativement l'un par rapport à l'autre. Il n'est pas encore question de présenter ici une formulation générale des problèmes vibratoires. La façon dont nous allons prendre en compte la masse du ressort nécessitera qu'à tout instant la déformée du ressort s'apparente à une déformée statique. Cette hypothèse fixe la limite de l'étude. Elle suppose qu'en mouvement libre, le ressort peut emmagasiner de l'énergie cinétique sans que l'allure de sa déformée soit trop affectée par les forces liées aux accélérations de sa propre masse.
Lorsque cette condition est vérifiée :
- la variation de la hauteur du ressort détermine entièrement son état et son énergie de déformation - le déplacement d'un élément de masse du ressort peut être exprimé en fonction des déplacements des extrémités du ressort, ce qui permet d'en déduire une énergie cinétique.
L'incidence de la masse du ressort sur la pulsation propre du système peut alors être estimée au moyen de la méthode énergétique. Reprenons comme exemple, le système ci-dessous :
dX
X
m
k H
dmr
mr
t
S
S.X / H
Soit mr la masse du ressort. Cette masse est supposée uniformément répartie sur une hauteur H. Le déplacement de l'extrémité solidaire de la masse m est égal au déplacement de cette masse. L'extrémité liée au sol est fixe : le ressort n'a donc pas la possibilité de se déplacer d'un bloc.
Dans le cas d'un ressort hélicoïdal soumis à une force constante, on sait que la variation de hauteur est proportionnelle à la hauteur déformée. Par extension, on admettra que lorsque la masse m est animée d'un mouvement sinusoïdal d'amplitude S, une tranche élémentaire du ressort est animée d'un mouvement sinusoïdal en phase avec celui de la masse m et d’amplitude proportionnelle à sa distance X à la base fixe du ressort. Cette amplitude sera donnée par l'expression : (S / H).X.
Avec ces hypothèses complémentaires :
- la masse d'une tranche de hauteur dX est : dmr = (mr / H).dX, - la vitesse maximale d'une tranche à la distance X de l'extrémité fixe est : ((S / H).X).ωo, - les vitesses de toutes les masses sont maximales (ou nulles) au même instant.
On demande d'écrire à nouveau la conversion de l'énergie de déformation en énergie cinétique.
,

21
SOLUTION Lors du mouvement libre, l'énergie de déformation et l'énergie cinétique varient en sens inverse et atteignent des valeurs maximales égales. Pour une tranche élémentaire du ressort, l'énergie cinétique maximale est donnée par l'expression
2
or .X.
HS
.dX.Hm
.21
ω
.
On en déduit par intégration sur la hauteur du ressort, l'énergie cinétique maximale de la masse mr
∫ωH
022
o2
3r dX.X..S.
Hm
.21
, soit : 2o
2r .S.3
m.
21
ω .
Au même instant, l'énergie cinétique de la masse m est maximale et atteint :
2o
2.S.m.21 ω .
Lorsqu'on reporte la somme de ces énergies dans l'équation de conservation de l'énergie,
on obtient : 22
o2r2
o2 S.k.
21
.S.3
m.
21
.S.m.21
=ω+ω .
On en tire :
3m
m
kr
o+
=ω
Pour tenir compte de la masse du ressort, on ajoutera donc le tiers de cette masse à la masse m. Attention :
Le facteur 1/3 ne doit pas être généralisé. Il découle d'une part, de la répartition uniforme de la masse du ressort, et d'autre part, de la loi de décroissance des amplitudes du mouvement des points du ressort en fonction de la distance à la masse indéformable. Cette loi doit être linéaire et une extrémité du ressort doit être fixe. Ce facteur peut être appliqué à d’autres problèmes, mais uniquement sous ces deux conditions. ___________________________________________________________________________
:
:
22
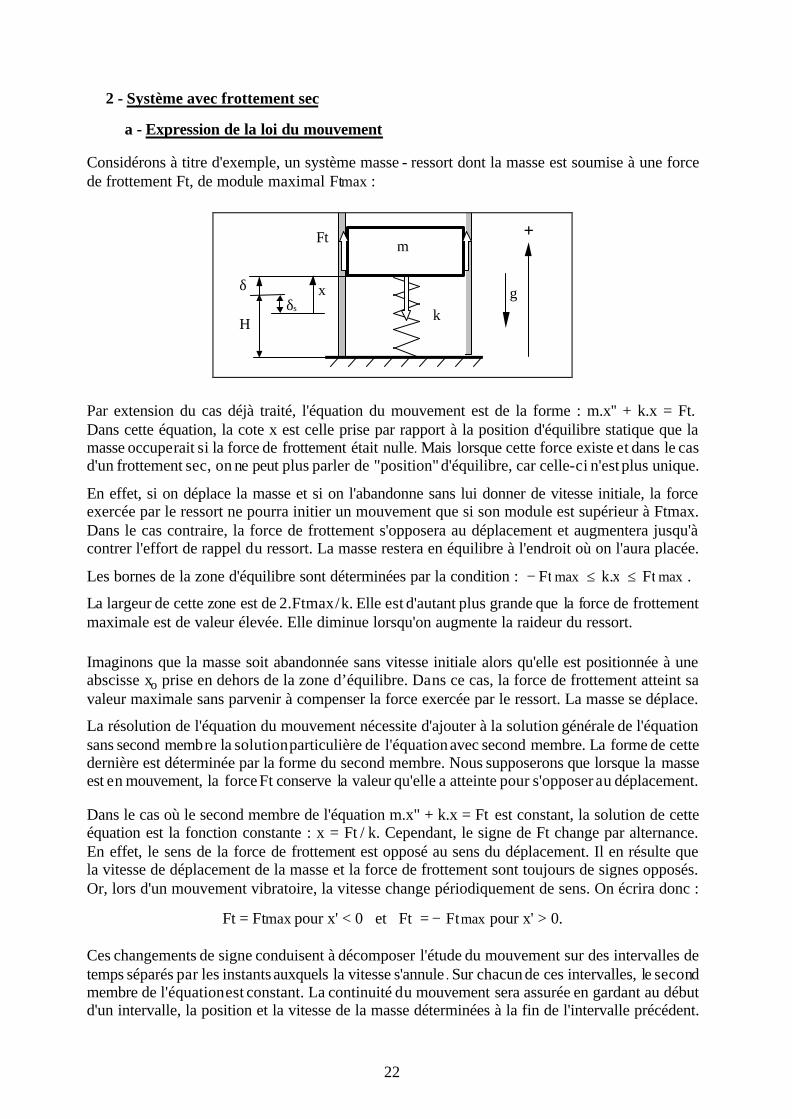
2 - Système avec frottement sec
a - Expression de la loi du mouvement Considérons à titre d'exemple, un système masse - ressort dont la masse est soumise à une force
de frottement Ft, de module maximal Ftmax :
δ
δs x
k H
g
+ m
Ft
Par extension du cas déjà traité, l'équation du mouvement est de la forme : m.x'' + k.x = Ft. Dans cette équation, la cote x est celle prise par rapport à la position d'équilibre statique que la masse occuperait si la force de frottement était nulle. Mais lorsque cette force existe et dans le cas d'un frottement sec, on ne peut plus parler de "position" d'équilibre, car celle-ci n'est plus unique.
En effet, si on déplace la masse et si on l'abandonne sans lui donner de vitesse initiale, la force exercée par le ressort ne pourra initier un mouvement que si son module est supérieur à Ftmax. Dans le cas contraire, la force de frottement s'opposera au déplacement et augmentera jusqu'à contrer l'effort de rappel du ressort. La masse restera en équilibre à l'endroit où on l'aura placée.
Les bornes de la zone d'équilibre sont déterminées par la condition : maxmax Ftx.kFt ≤≤− .
La largeur de cette zone est de 2.Ftmax / k. Elle est d'autant plus grande que la force de frottement maximale est de valeur élevée. Elle diminue lorsqu'on augmente la raideur du ressort. Imaginons que la masse soit abandonnée sans vitesse initiale alors qu'elle est positionnée à une abscisse xo prise en dehors de la zone d’équilibre. Dans ce cas, la force de frottement atteint sa valeur maximale sans parvenir à compenser la force exercée par le ressort. La masse se déplace.
La résolution de l'équation du mouvement nécessite d'ajouter à la solution générale de l'équation sans second membre la solution particulière de l'équation avec second membre. La forme de cette dernière est déterminée par la forme du second membre. Nous supposerons que lorsque la masse est en mouvement, la force Ft conserve la valeur qu'elle a atteinte pour s'opposer au déplacement. Dans le cas où le second membre de l'équation m.x" + k.x = Ft est constant, la solution de cette équation est la fonction constante : x = Ft / k. Cependant, le signe de Ft change par alternance. En effet, le sens de la force de frottement est opposé au sens du déplacement. Il en résulte que la vitesse de déplacement de la masse et la force de frottement sont toujours de signes opposés. Or, lors d'un mouvement vibratoire, la vitesse change périodiquement de sens. On écrira donc :
Ft = Ftmax pour x' < 0 et Ft = maxFt− pour x' > 0. Ces changements de signe conduisent à décomposer l'étude du mouvement sur des intervalles de temps séparés par les instants auxquels la vitesse s'annule . Sur chacun de ces intervalles, le second membre de l'équation est constant. La continuité du mouvement sera assurée en gardant au début d'un intervalle, la position et la vitesse de la masse déterminées à la fin de l'intervalle précédent.

23
Les calculs sont résumés ci-dessous : Dans le cas où la cote initiale xo est positive, l'effort exercée par le ressort est de sens négatif et la force de frottement est tout d'abord de sens positif. L'équation du mouvement est dans ce cas :
maxFtx.k"x.m =+ .
On en déduit : [ ]kmaxFt
)t.(sin.B)t.(cos.Ax oo +ω+ω= , avec : mk
o =ω .
Pour un lâcher sans vitesse initiale :
A l'instant t = 0 : kmaxFt
Axx o +== kmaxFt
oxA −=⇒ ,
o.B0'x ω== 0B =⇒ . D'où l'expression :
k
maxFt
k
maxFt)t.(cos.xx oo +ω
−=
La vitesse x'(t) varie selon une loi en - sin(ωo.t). Lorsque t augmente, le module de cette vitesse croît, passe par un extremum puis diminue jusqu'à s'annuler à un instant t1, tel que sin(ωo.t1) = 0. Cette condition est vérifiée une première fois lorsque : ωo.t1 = π . On en tire : =1t To / 2. A cet instant, le mouvement change de sens et la force de frottement devient négative. L'équation du mouvement est alors :
maxFtx.k"x.m −=+
On en déduit : [ ]kmaxFt
)t.(sin.D)t.(cos.Cx oo −ω+ω= .
Si l'on conserve la même origine des temps, les conditions de continuité du mouvement imposent
à l'instant t1 tel que ωo.t1 = π :
k
FtC
kFt
.2xxmaxmax
o −−=+−= k
Ft.3xC
maxo −=⇒
o.D0'x ω== 0D =⇒ .
D'où l'expression :
kmaxFt
kmaxFt
)t.(cos..3xx oo −ω
−=
La vitesse s'annule à nouveau lorsque ωo.t2 = 2.π o2 Tt =⇒ . A cet instant : .kmaxFt
.4xx o −=
Remarque :
- La durée d'une oscillation est égale à To. Mais on ne peut pas parler de période puisque le mouvement est d'amplitude décroissante. On dit que To est la pseudo-période du mouvement.

24
Si l'on réitérait la démarche, on constaterait que la durée d'une oscillation est toujours égale à To et que la différence entre les cotes x calculées à des instants n.To et (n + 1).To , avec n un entier, est toujours égale à 4.Ftmax / k. Ce résultat est démontré ci-dessous. Il en résulte que les extremums respectivement positifs et négatifs de x(t) sont situés sur des droites symétriques.
Le mouvement s'interrompt et un équilibre de forces s'établit lorsque la vitesse du mouvement est nulle alors que la position de la masse correspond à un point de la zone d'équilibre statique. Le tracé suivant résume l'ensemble des résultats :
b - Interprétation énergétique On retiendra de l'étude du frottement sec que ce phénomène dissipatif n'affecte pas la durée d'une oscillation propre et qu'il induit une décroissance linéaire de l'amplitude du mouvement.
Lorsqu'on considère deux instants ti et ti + To /2, auxquels la vitesse de la masse passe par zéro, la diminution de l'amplitude des déformations du ressort révèle la perte d'énergie du système. L'énergie perdue correspond au travail résistant de la force de frottement . Sur l'intervalle de temps considéré, cette dernière est de module constant et le déplacement de son point d'application est toujours de même sens. Son travail est donc égal au produit de son module Ftmax et de la distance parcourue par son point d'application. Cette distance est donnée par le déplacement de la masse.
Soit | xi | la position de la masse à l'instant ti et ∆x la diminution de l'amplitude du mouvement entre les instants ti et ti + To / 2. Le bilan énergétique permet d'écrire la relation :
( )[ ]xxx.Ft)xx.(k.21
x.k.21
ii2
i2i max ∆−+=
∆−−
.
On en tire l'équation : 0x.Ft.4x).Ftx.k.(2x.k ii2 maxmax =+∆+−∆ .
Les solutions sont :
k
)Ftx.k()Ftx.k(
k
x.Ft.k.4)Ftx.k()Ftx.k( 2iii
2ii maxmaxmaxmaxmax −±+
=−+±+
La solution ix.2x =∆ n'est pas à retenir puisque ixx ≤∆ , d'où le résultat : .i,k
Ft.2x
max∀=∆
On retrouve ainsi la relation de décroissance linéaire des positions maximales pour lesquelles la vitesse de la masse change de sens, soit une diminution de 2.Ftmax / k à chaque demi oscillation. ________________________________________________________________________________________________________________
Ftmax / k
- Ftmax / k - xi
ti
xi - ∆xi
25
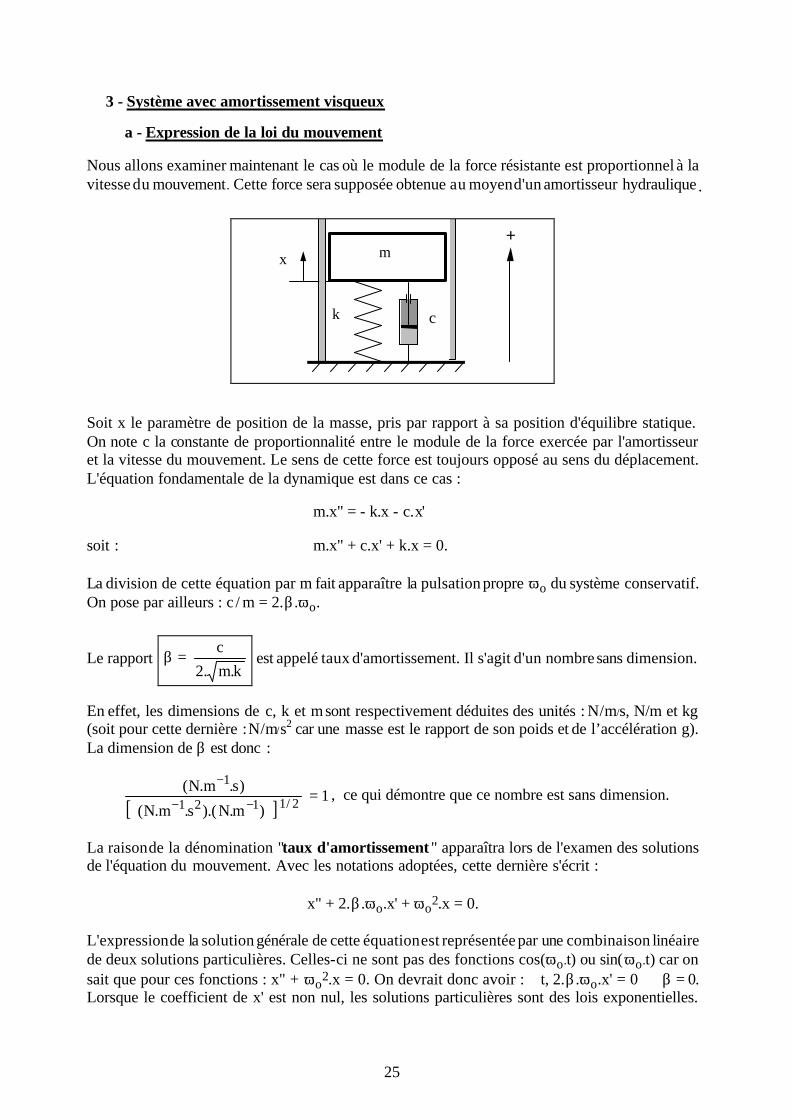
3 - Système avec amortissement visqueux
a - Expression de la loi du mouvement Nous allons examiner maintenant le cas où le module de la force résistante est proportionnel à la vitesse du mouvement. Cette force sera supposée obtenue au moyen d'un amortisseur hydraulique
x m
k
+
2h
Soit x le paramètre de position de la masse, pris par rapport à sa position d'équilibre statique. On note c la constante de proportionnalité entre le module de la force exercée par l'amortisseur et la vitesse du mouvement. Le sens de cette force est toujours opposé au sens du déplacement. L'équation fondamentale de la dynamique est dans ce cas : m.x" = - k.x - c.x' soit : m.x" + c.x' + k.x = 0. La division de cette équation par m fait apparaître la pulsation propre ωo du système conservatif. On pose par ailleurs : c / m = 2.β .ωo.
Le rapport k.m.2
c=β est appelé taux d'amortissement. Il s'agit d'un nombre sans dimension.
En effet, les dimensions de c, k et m sont respectivement déduites des unités : N/m/s, N/m et kg (soit pour cette dernière : N/m/s2 car une masse est le rapport de son poids et de l’accélération g). La dimension de β est donc :
[ ]1
)m.N).(s.m.N(
)s.m.N(2/1121
1=−−
−, ce qui démontre que ce nombre est sans dimension.
La raison de la dénomination "taux d'amortissement" apparaîtra lors de l'examen des solutions de l'équation du mouvement. Avec les notations adoptées, cette dernière s'écrit :
x" + 2.β .ωo.x' + ωo2.x = 0.
L'expression de la solution générale de cette équation est représentée par une combinaison linéaire de deux solutions particulières. Celles-ci ne sont pas des fonctions cos(ωo.t) ou sin(ωo.t) car on sait que pour ces fonctions : x" + ωo
2.x = 0. On devrait donc avoir : ∀t, 2.β .ωo.x' = 0 ⇒ β = 0. Lorsque le coefficient de x' est non nul, les solutions particulières sont des lois exponentielles.
.
c

26
Il n'est pas question de reporter ici toute la démonstration mathématique. Nous n'en rappellerons que les points essentiels.
Posons : x = e r.t. Alors : x' = r.e
r.t = r.x et x" = r2.e r.t = r2.x.
Cette fonction sera une solution de l'équation à résoudre si elle vérifie la condition : x" + 2.β .ωo.x' + ωo
2.x = 0. Pour que cette condition soit vérifiée aux instants où x(t) est non nul, il faut que l'exposant r soit la solution de l'équation du second degré :
r2 + 2.β .ωo.r + ωo2 = 0.
On en tire : 1..r 2oo −βω±ωβ−= .
Il existe donc à priori deux solutions particulières de forme exponentielle. Cependant il convient de différencier trois cas, selon que le coefficient β de l'équation est supérieur, égal ou inférieur à un, c'est-à-dire selon le signe de la quantité sous la racine.
Lorsque ce dernier est négatif, on écrit : 2222 1.j)1(j1 β−=β−=−β .
Les conclusions sont les suivantes :
Pour β < 1 : la solution générale de l'équation : x" + 2.β .ωo.x' + ωo2.x = 0, est :
β−ω+β−ω= ωβ− )t.1.(sin.B)t.1.(cos.A.ex 2
o2
ot.. o
ou : ( )ψ−ω= ωβ− t.cos.S.ex dt.. o avec :
2od 1. β−ω=ω
Pour β = 1 : la solution est : )Bt.A.(ex t.. o += ωβ− Pour β > 1 : la solution est une combinaison de deux fonctions exponentielles :
+=
−βω−−βω+ωβ− t).1.(t).1.(t.. 2o
2oo e.Be.A.ex
Dans le cas où x(t) est la loi du mouvement libre d'un système amorti, on en déduit :
- que pour un taux d'amortissement inférieur à un, ce mouvement est un mouvement sinusoïdal de pulsation ωd inférieure à la pulsation propre ωo du système conservatif et dont l' amplitude est décroissante selon une exponentielle - β .ωo.t,
- que pour un taux d'amortissement supérieur à un, ce mouvement n'est plus de forme sinusoïdale.
Le taux d'amortissement d'un système est donc le rapport entre sa constante d'amortissement c et une valeur d'amortissement critique k.m.2 pour laquelle le mouvement libre change de nature.
27
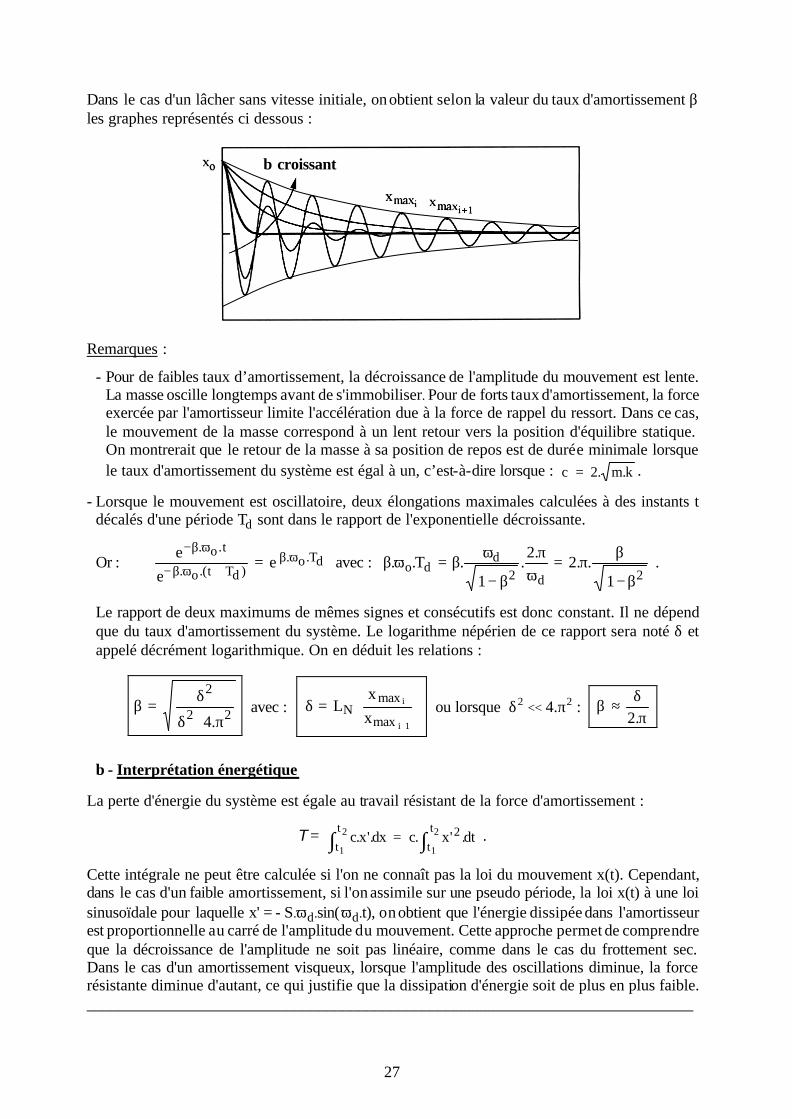
Dans le cas d'un lâcher sans vitesse initiale, on obtient selon la valeur du taux d'amortissement β les graphes représentés ci dessous :
Remarques :
- Pour de faibles taux d’amortissement, la décroissance de l'amplitude du mouvement est lente. La masse oscille longtemps avant de s'immobiliser. Pour de forts taux d'amortissement, la force exercée par l'amortisseur limite l'accélération due à la force de rappel du ressort. Dans ce cas, le mouvement de la masse correspond à un lent retour vers la position d'équilibre statique. On montrerait que le retour de la masse à sa position de repos est de durée minimale lorsque le taux d'amortissement du système est égal à un, c’est-à-dire lorsque : k.m.2c = .
- Lorsque le mouvement est oscillatoire, deux élongations maximales calculées à des instants t décalés d'une période Td sont dans le rapport de l'exponentielle décroissante.
Or : dT.o.)dTt.(o.
t.o.e
ee ωβ
+ωβ−
ωβ−= avec :
2d2d
do1
..2.2
.1
.T..β−
βπ=
ωπ
β−
ωβ=ωβ .
Le rapport de deux maximums de mêmes signes et consécutifs est donc constant. Il ne dépend que du taux d'amortissement du système. Le logarithme népérien de ce rapport sera noté δ et appelé décrément logarithmique. On en déduit les relations :
22
2
.4 π+δ
δ=β avec :
=δ
+1i
i
max
maxN x
xL ou lorsque δ2 << 4.π2 :
πδ
≈β.2
b - Interprétation énergétique
La perte d'énergie du système est égale au travail résistant de la force d'amortissement :
T = ∫ ∫=2
1
2
1
t
t
t
t2 dt.'x.cdx'.x.c .
Cette intégrale ne peut être calculée si l'on ne connaît pas la loi du mouvement x(t). Cependant, dans le cas d'un faible amortissement, si l'on assimile sur une pseudo période, la loi x(t) à une loi sinusoïdale pour laquelle x' = - S.ωd.sin(ωd.t), on obtient que l'énergie dissipée dans l'amortisseur est proportionnelle au carré de l'amplitude du mouvement. Cette approche permet de comprendre que la décroissance de l'amplitude ne soit pas linéaire, comme dans le cas du frottement sec. Dans le cas d'un amortissement visqueux, lorsque l'amplitude des oscillations diminue, la force résistante diminue d'autant, ce qui justifie que la dissipation d'énergie soit de plus en plus faible. ____________________________________________________________________________
β croissant
28
III - MOUVEMENTS FORCES Remarques préliminaires :
- Pour entretenir le mouvement d'un système dissipatif, il faut compenser sa perte d'énergie. Nous allons traiter du mouvement d'un système soumis à l'action d'une force motrice exercée soit sur sa masse, soit à la base du ressort.
- Tous les systèmes sont dissipatifs . Cependant nous allons revenir sur l'étude du mouvement d'un système conservatif. Le but est de dissocier les phénomènes liés à une interaction inertie / raideur (ou énergie cinétique / énergie de déformation) et l'effet d'un amortissement (énergie dissipée).
- Lorsque le mouvement est forcé, la loi du mouvement dépend des conditions de forces ou de déplacements imposées au système. Nous étudierons tout d'abord les effets d'une force F(t) dont la loi de variation au cours du temps est sinusoïdale. Dans ce cas, on connaît l'expression de la solution particulière de l’équation du mouvement. On peut alors résoudre cette équation. Nous découvrirons ensuite l’importance que revêt cette étude lorsque nous traiterons de lois de variations pour lesquelles on ne connaît pas l'expression de la solution particulière de l'équation.
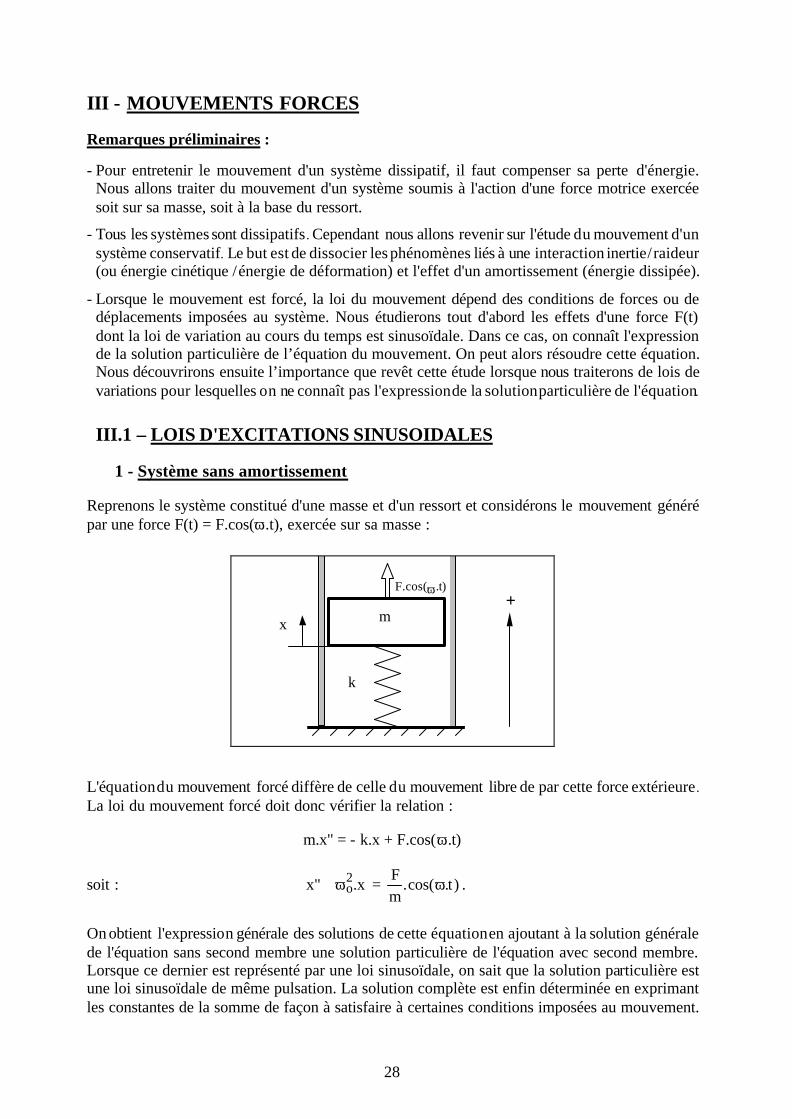
III.1 – LOIS D'EXCITATIONS SINUSOIDALES 1 - Système sans amortissement Reprenons le système constitué d'une masse et d'un ressort et considérons le mouvement généré par une force F(t) = F.cos(ω.t), exercée sur sa masse :
x m
k
+ F.cos (ω.t)
L'équation du mouvement forcé diffère de celle du mouvement libre de par cette force extérieure . La loi du mouvement forcé doit donc vérifier la relation : m.x" = - k.x + F.cos(ω.t)
soit : )t.(cos.mF
x."x 2o ω=ω+ .
On obtient l'expression générale des solutions de cette équation en ajoutant à la solution générale de l'équation sans second membre une solution particulière de l'équation avec second membre. Lorsque ce dernier est représenté par une loi sinusoïdale, on sait que la solution particulière est une loi sinusoïdale de même pulsation. La solution complète est enfin déterminée en exprimant les constantes de la somme de façon à satisfaire à certaines conditions imposées au mouvement.
29
Les calculs sont détaillés ci-dessous :
Posons : x(t) = α.cos(ω.t - ϕ). Alors : x"(t) = - α.ω2.cos(ω.t - ϕ).
Lorsqu'on reporte ces expressions dans l’équation du mouvement, on obtient la condition :
)t.(cos.mF
)t.(cos..)t.(cos.. 2o
2 ω=ϕ−ωαω+ϕ−ωωα−
soit : )t.(cos.mF
)t.(cos)..(ou)t.(cos)..( 2o
222o ω=π+ϕ−ωω−ωαϕ−ωω−ωα .
L’amplitude α devant être positive, on en extrait :
22
o.m
F
ω−ω=α
et ϕ = 0, lorsque : ω < ωo ϕ = π , lorsque : ω > ωo.
Dans le cas par exemple où ω < ωo, la loi du mouvement forcé est de la forme :
[ ]
ω
ω−ω+ω+ω= )t.(cos.
).(m
F)t.(sin.B)t.(cos.Ax 22
ooo .
Si l’on pose à t = 0 :
).(m
FAxx 22
oo
ω−ω+==
).(m
FxA 22
oo
ω−ω−=⇒ ,
oo .Bv'x ω== o
ovB
ω=⇒ ,
on obtient :
( )
ω−ω
ω−ω+
ω
ω+ω= )t.(cos)t.(cos.
).(m
F)t.(sin.
v)t.(cos.xx o22
oo
o
ooo
Selon cette expression, la loi du mouvement forcé est la somme de deux termes : - le premier correspond à la continuation du mouvement libre du système (xo ≠ 0, vo ≠ 0 et F = 0) - le second représente le mouvement que produirait la force, si elle était appliquée sur le système
au repos (xo = 0, vo = 0 et F ≠ 0).
L'effet d'une force exercée sur un système en mouvement pourra donc être étudié en considérant le système au repos, puis en superposant le mouvement obtenu à celui qu'aurait eu la masse si la force n'avait pas été appliquée.
Cette décomposition conduit à examiner plus en détails le seul terme :
[ ])t.(cos)t.(cos.).(m
F)t(x o22
oω−ω
ω−ω=
Celui-ci est la différence de deux fonctions sinusoïdales, de mêmes amplitudes et phases, l'une de pulsation égale à la pulsation de l'excitation, l'autre de pulsation égale à la pulsation propre du système. L'allure du mouvement va dépendre fortement de l'écart entre ces deux pulsations.
30
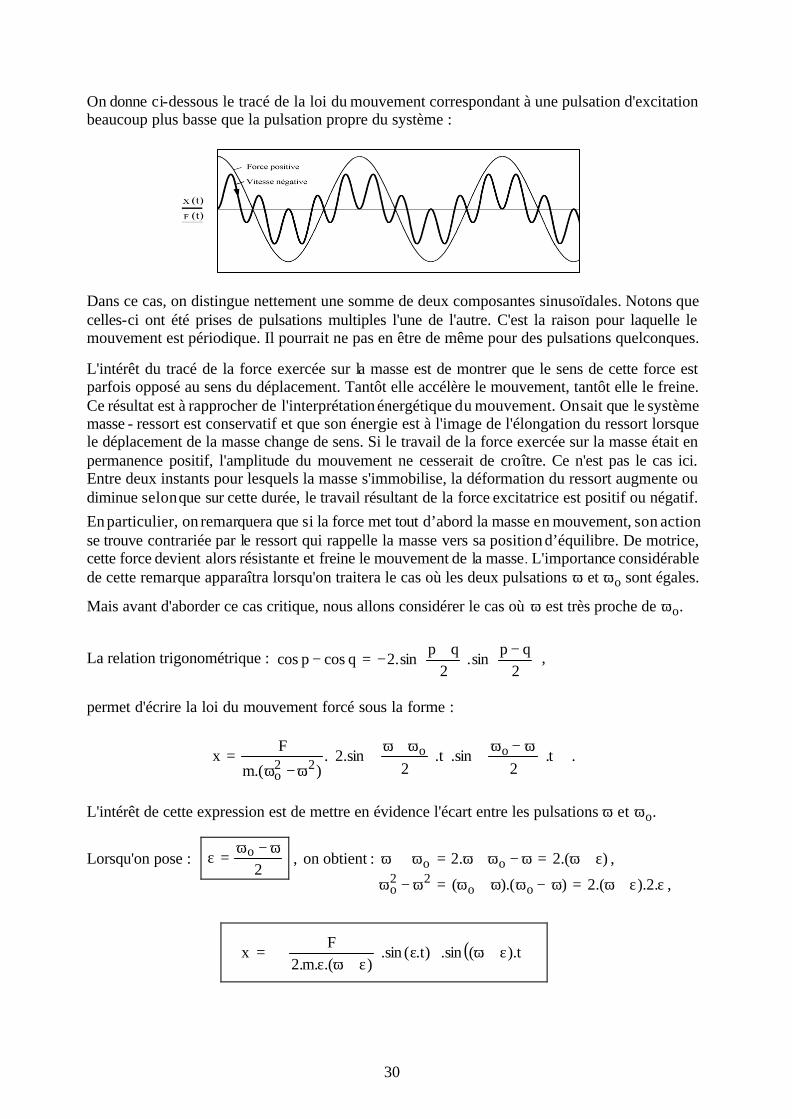
On donne ci-dessous le tracé de la loi du mouvement correspondant à une pulsation d'excitation beaucoup plus basse que la pulsation propre du système :
Dans ce cas, on distingue nettement une somme de deux composantes sinusoïdales. Notons que celles-ci ont été prises de pulsations multiples l'une de l'autre. C'est la raison pour laquelle le mouvement est périodique. Il pourrait ne pas en être de même pour des pulsations quelconques.
L'intérêt du tracé de la force exercée sur la masse est de montrer que le sens de cette force est parfois opposé au sens du déplacement. Tantôt elle accélère le mouvement, tantôt elle le freine. Ce résultat est à rapprocher de l'interprétation énergétique du mouvement. On sait que le système masse - ressort est conservatif et que son énergie est à l'image de l'élongation du ressort lorsque le déplacement de la masse change de sens. Si le travail de la force exercée sur la masse était en permanence positif, l'amplitude du mouvement ne cesserait de croître. Ce n'est pas le cas ici. Entre deux instants pour lesquels la masse s'immobilise, la déformation du ressort augmente ou diminue selon que sur cette durée, le travail résultant de la force excitatrice est positif ou négatif.
En particulier, on remarquera que si la force met tout d’abord la masse en mouvement, son action se trouve contrariée par le ressort qui rappelle la masse vers sa position d’équilibre. De motrice, cette force devient alors résistante et freine le mouvement de la masse. L'importance considérable de cette remarque apparaîtra lorsqu'on traitera le cas où les deux pulsations ω et ωo sont égales.
Mais avant d'aborder ce cas critique, nous allons considérer le cas où ω est très proche de ωo.
La relation trigonométrique :
−
+
−=−2
qpsin.
2qp
sin.2qcospcos ,
permet d'écrire la loi du mouvement forcé sous la forme :
ω−ω
ω+ω
ω−ω= t.
2sin.t.
2sin.2.
).(m
Fx oo
22o
.
L'intérêt de cette expression est de mettre en évidence l'écart entre les pulsations ω et ωo.
Lorsqu'on pose : 2
o ω−ω=ε , on obtient : ).(2.2 oo ε+ω=ω−ω+ω=ω+ω ,
( )t).(sin.)t.(sin.).(.m.2
Fx ε+ω
ε
ε+ωε
=
εε+ω=ω−ωω+ω=ω−ω .2)..(2)).(( oo22
o ,
31
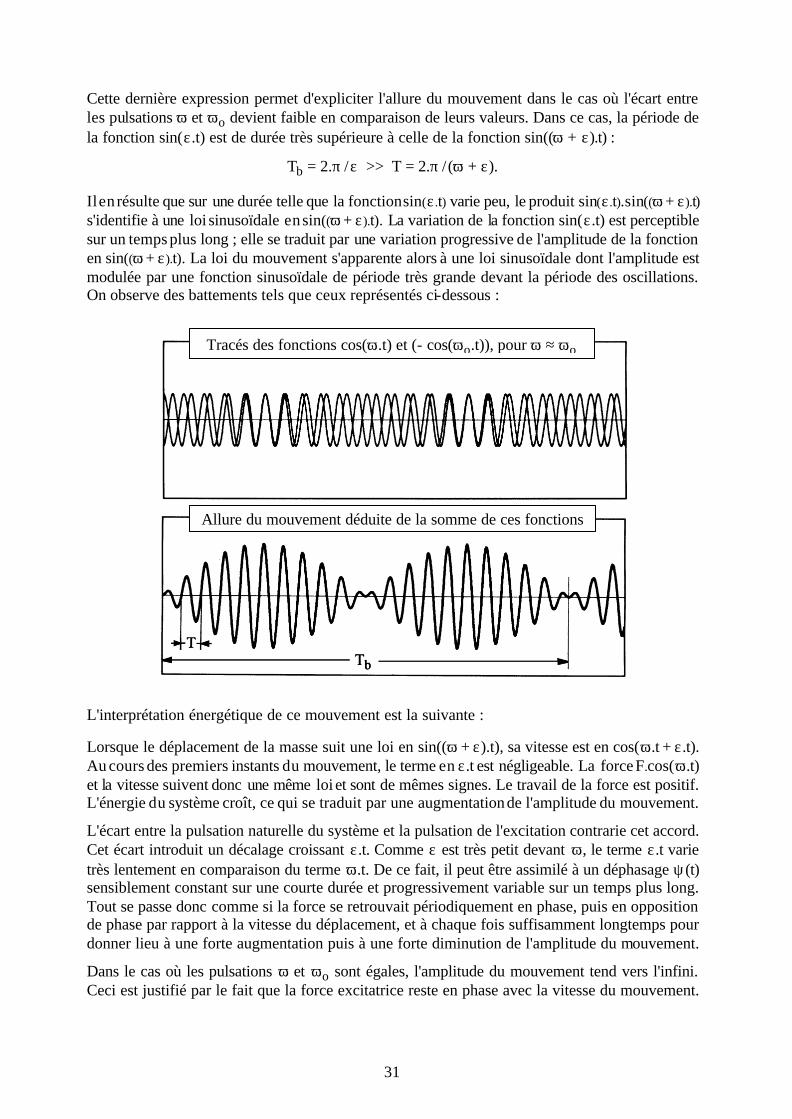
Cette dernière expression permet d'expliciter l'allure du mouvement dans le cas où l'écart entre les pulsations ω et ωo devient faible en comparaison de leurs valeurs. Dans ce cas, la période de la fonction sin(ε.t) est de durée très supérieure à celle de la fonction sin((ω + ε).t) :
Tb = 2.π / ε >> T = 2.π / (ω + ε). Il en résulte que sur une durée telle que la fonction sin(ε .t) varie peu, le produit sin(ε .t).sin((ω + ε).t) s'identifie à une loi sinusoïdale en sin((ω + ε).t). La variation de la fonction sin(ε.t) est perceptible sur un temps plus long ; elle se traduit par une variation progressive de l'amplitude de la fonction en sin((ω + ε).t). La loi du mouvement s'apparente alors à une loi sinusoïdale dont l'amplitude est modulée par une fonction sinusoïdale de période très grande devant la période des oscillations. On observe des battements tels que ceux représentés ci-dessous :
L'interprétation énergétique de ce mouvement est la suivante :
Lorsque le déplacement de la masse suit une loi en sin((ω + ε).t), sa vitesse est en cos(ω.t + ε.t). Au cours des premiers instants du mouvement, le terme en ε.t est négligeable. La force F.cos(ω.t) et la vitesse suivent donc une même loi et sont de mêmes signes. Le travail de la force est positif. L'énergie du système croît, ce qui se traduit par une augmentation de l'amplitude du mouvement.
L'écart entre la pulsation naturelle du système et la pulsation de l'excitation contrarie cet accord. Cet écart introduit un décalage croissant ε.t. Comme ε est très petit devant ω, le terme ε.t varie très lentement en comparaison du terme ω.t. De ce fait, il peut être assimilé à un déphasage ψ(t) sensiblement constant sur une courte durée et progressivement variable sur un temps plus long. Tout se passe donc comme si la force se retrouvait périodiquement en phase, puis en opposition de phase par rapport à la vitesse du déplacement, et à chaque fois suffisamment longtemps pour donner lieu à une forte augmentation puis à une forte diminution de l'amplitude du mouvement.
Dans le cas où les pulsations ω et ωo sont égales, l'amplitude du mouvement tend vers l'infini. Ceci est justifié par le fait que la force excitatrice reste en phase avec la vitesse du mouvement.
Tracés des fonctions cos(ω.t) et (- cos(ωo.t)), pour ω ≈ ωo
Allure du mouvement déduite de la somme de ces fonctions

32
Le développement limité au premier ordre : sin(ε.t) ≈ ε.t, montre que dans les premiers instants du mouvement, l'amplitude des oscillations croît en proportion de la durée d’action de la force. En effet :
pour ε.t << 1 : ( ) ( )t).(sin.t.).(m.2
Ft).(sin.)t.(sin.
).(.m.2F
)t(x ε+ω
ε+ω
≈ε+ω
ε
ε+ωε
= .
Lorsque ε est très petit, cette approximation est vérifiée jusqu'à un instant t d'autant plus grand. La force exercée sur la masse agit alors au rythme du mouvement naturel du système et ne cesse d'amplifier ce mouvement. On dit que le système entre en résonance.
Ce phénomène est extrêmement dangereux car l'élongation du ressort est fonction du déplacement de la masse. Si l'amplitude du mouvement devient trop élevée, le ressort risque donc de rompre ou de se déformer plastiquement. Ce risque est d'autant plus à prendre en considération que la valeur de la force exercée sur la masse importe peu. Plus l'amplitude de la force sera faible, plus l'augmentation de l'amplitude du mouvement sera lente, cependant si la force ne cesse d'agir, l'amplitude du mouvement finira toujours par atteindre une valeur inadmissible au regard de la déformation élastique du ressort. Ce ne sera qu'une question de temps. Une excitation sinusoïdale jugée faible parce qu'elle induirait des contraintes négligeables en quasi-statique pourra ainsi, malgré sa faible amplitude, détruire un système si elle est caractérisée par une fréquence égale à sa fréquence de résonance et si elle agit suffisamment longtemps.
Fort heureusement, il existe en pratique des phénomènes qui dissipent de l’énergie en proportion de la vitesse ou de l'amplitude du mouvement et qui limitent de fait les amplitudes à la résonance. C'est ce dont nous allons traiter dans le paragraphe suivant.
____________________________________________________________________________
Evoquons pour finir, l'effondrement du pont de Tacoma souvent cité comme exemple des effets destructeurs d'une résonance. Ce pont s'est effondré le 7 novembre 1940, quatre mois après son inauguration. Dès sa construction, on avait pu observé que le tablier du pont oscillait sous l'action de vents souvent modestes. Le pont constituant un obstacle à l'écoulement d'air, des tourbillons se formaient à l'arrière du tablier. Il en résultait des variations de pressions équivalentes à une excitation vibratoire. La forte amplitude des oscillations observées n'était que la traduction d'une faible raideur, expliquée par des choix de conception. On attribue souvent la destruction du pont de Tacoma à la coïncidence entre la fréquence des tourbillons et une fréquence propre du pont. En fait, l'origine de la destruction est plus complexe. Elle est due à un couplage fluide-structure. La grande souplesse du pont a permis la torsion du tablier et une fois que le pont a commencé à se tordre, la modification des conditions d'écoulement d'air autour de cet obstacle en mouvement a généré des fluctuations de pression équivalentes à un couple de torsion. On a montré depuis que l'amplitude de ce dernier était proportionnelle à celle de la vitesse du mouvement et que les deux étaient en phase. L'étude de ce phénomène se ramène donc à une équation du mouvement de la forme : x" + ωo
2.x = 2.β .ωo.x', différente de celle étudiée jusqu'ici. On parle dans ce cas de vibrations auto-excitées et d'amortissement négatif. L'amplitude de l'excitation augmentant alors avec celle du mouvement, on comprend qu'une fois que le mouvement du pont a été initié par un coup de vent, l'amplitude des oscillations ait augmenté de plus en plus vite jusqu'à l'effondrement.
34
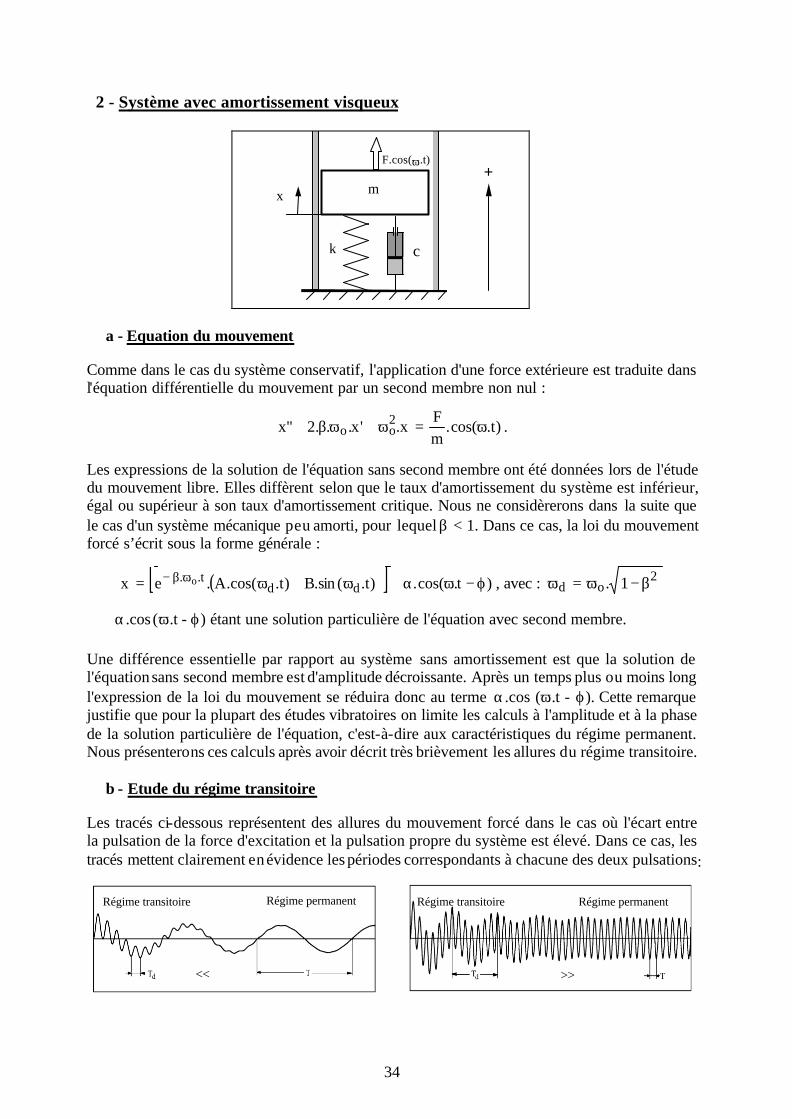
2 - Système avec amortissement visqueux
x m
k
+ F.cos (ω.t)
2h
a - Equation du mouvement Comme dans le cas du système conservatif, l'application d'une force extérieure est traduite dans l'équation différentielle du mouvement par un second membre non nul :
)t.(cos.mF
x.'x...2"x 2oo ω=ω+ωβ+ .
Les expressions de la solution de l'équation sans second membre ont été données lors de l'étude du mouvement libre. Elles diffèrent selon que le taux d'amortissement du système est inférieur, égal ou supérieur à son taux d'amortissement critique. Nous ne considèrerons dans la suite que le cas d'un système mécanique peu amorti, pour lequel β < 1. Dans ce cas, la loi du mouvement forcé s’écrit sous la forme générale :
( )[ ] )t.(cos.)t.(sin.B)t.(cos.A.ex ddt.. o ϕ−ωα+ω+ω= ωβ− , avec : 2
od 1. β−ω=ω
α.cos (ω.t - ϕ) étant une solution particulière de l'équation avec second membre. Une différence essentielle par rapport au système sans amortissement est que la solution de l'équation sans second membre est d'amplitude décroissante. Après un temps plus ou moins long l'expression de la loi du mouvement se réduira donc au terme α.cos (ω.t - ϕ). Cette remarque justifie que pour la plupart des études vibratoires on limite les calculs à l'amplitude et à la phase de la solution particulière de l'équation, c'est-à-dire aux caractéristiques du régime permanent. Nous présenterons ces calculs après avoir décrit très brièvement les allures du régime transitoire. b - Etude du régime transitoire Les tracés ci-dessous représentent des allures du mouvement forcé dans le cas où l'écart entre la pulsation de la force d'excitation et la pulsation propre du système est élevé. Dans ce cas, les tracés mettent clairement en évidence les périodes correspondants à chacune des deux pulsations
Régime transitoire Régime permanent Régime transitoire Régime permanent
<< >>
:
c

34
Examinons plus en détails le cas où la pulsation d'excitation est voisine de la pulsation propre.
Remarque préliminaire :
Outre l'atténuation de l'amplitude du mouvement libre, l'amortissement a de multiples effets : la fréquence propre d'un système est quelque peu différente selon qu'il est amorti ou non amorti; nous découvrirons plus loin que la fréquence de résonance d'un système amorti est différente de sa fréquence propre. Cependant nous ne considérerons pour l'instant que l'effet prépondérant de l'amortissement qui est de limiter l'amplitude à la résonance. Afin de mettre en évidence ce seul effet, nous supposerons que l'amortissement est faible (β << 1), ce qui permettra d'assimiler les valeurs des différentes pulsations caractéristiques du système. Nous prendrons donc : ωd ≈ ωo.
Dans ce cas, lorsque le système est excité par une force de pulsation égale à sa pulsation propre, la loi du mouvement forcé est de la forme :
( ) )t.(cos.)t.(sin.B)t.(cos.A.ex ooot.. o ϕ−ωα+
ω+ω= ωβ− .
Les quatre paramètres A, B, α et ϕ sont déterminés comme suit :
- Lorsqu'on reporte l'expression de la solution particulière dans l'équation du mouvement :
on obtient :
[ )t.(cos.. o2o ϕ−ωωα− ] [ ] [ ] )t.(cos.
mF
)t.(cos..)t.(sin.....2 o2oooo ω=ϕ−ωαω+ϕ−ωωα−ωβ+ .
Il reste : ( ) ( ) )t.(cos.mF
2/t.cos....2t.sin....2 oo2oo
2o ω=π+ϕ−ωαωβ=ϕ−ωαωβ− .
On en extrait par identification : β
=ωβ
=α.k.2
F
m...2
F2o
et 2π
=ϕ .
D'où :
)t.(sin..k.2
F)t.(cos. oo ω
β=ϕ−ωα
- Les constantes A et B sont ensuite fixées en fonction des conditions initiales du mouvement. Si l’on considère que le système est au repos à l'instant t = 0, alors :
( ) )t.(sin..k.2
F)t.(sin.B)t.(cos.A.ex ooo
t.o. ωβ
+ω+ω= ωβ−
avec : 0)0(x = ⇒ 0A = ,
et : )t.(cos...k.2
F)t.(cos..B.e)t.(sin.B.e..'x oooo
t..o
t..o
oo ωωβ
+ωω+ωωβ−= ωβ−ωβ−
avec : oo ..k.2
F.B)0('x ω
β+ω= = 0 ⇒
β−=
.k.2F
B .
Dans ces conditions : )t.(sin.e1..k.2
Fx o
t.. o ω
−
β= ωβ−
)t.(cos.mF
x.'x...2"x o2oo ω=ω+ωβ+
35
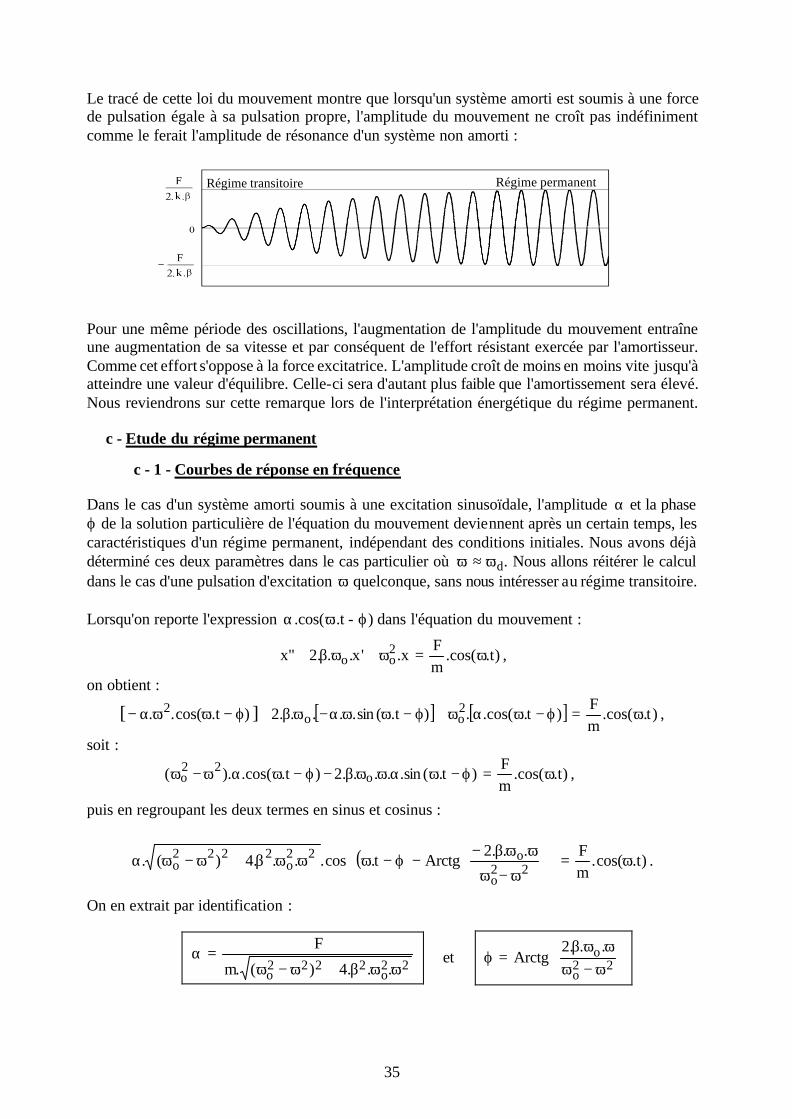
Le tracé de cette loi du mouvement montre que lorsqu'un système amorti est soumis à une force de pulsation égale à sa pulsation propre, l'amplitude du mouvement ne croît pas indéfiniment comme le ferait l'amplitude de résonance d'un système non amorti :
Pour une même période des oscillations, l'augmentation de l'amplitude du mouvement entraîne une augmentation de sa vitesse et par conséquent de l'effort résistant exercée par l'amortisseur. Comme cet effort s'oppose à la force excitatrice. L'amplitude croît de moins en moins vite jusqu'à atteindre une valeur d'équilibre. Celle-ci sera d'autant plus faible que l'amortissement sera élevé. Nous reviendrons sur cette remarque lors de l'interprétation énergétique du régime permanent. c - Etude du régime permanent
c - 1 - Courbes de réponse en fréquence Dans le cas d'un système amorti soumis à une excitation sinusoïdale, l'amplitude α et la phase ϕ de la solution particulière de l'équation du mouvement deviennent après un certain temps, les caractéristiques d'un régime permanent, indépendant des conditions initiales. Nous avons déjà déterminé ces deux paramètres dans le cas particulier où ω ≈ ωd. Nous allons réitérer le calcul dans le cas d'une pulsation d'excitation ω quelconque, sans nous intéresser au régime transitoire. Lorsqu'on reporte l'expression α.cos(ω.t - ϕ) dans l'équation du mouvement :
)t.(cos.mF
x.'x...2"x 2oo ω=ω+ωβ+ ,
on obtient :
[ )t.(cos.. 2 ϕ−ωωα− ] [ ] [ ] )t.(cos.mF
)t.(cos..)t.(sin.....2 2oo ω=ϕ−ωαω+ϕ−ωωα−ωβ+ ,
soit :
)t.(cos.mF
)t.(sin.....2)t.(cos.).( o22
o ω=ϕ−ωαωωβ−ϕ−ωαω−ω ,
puis en regroupant les deux termes en sinus et cosinus :
( ) )t.(cos.mF...2
Arctgt.cos....4)(. 22o
o22o
2222o ω=
ω−ω
ωωβ−−ϕ−ωωωβ+ω−ωα .
On en extrait par identification :
22o
2222o ...4)(.m
F
ωωβ+ω−ω=α
et
ω−ωωωβ
=ϕ 22o
o ...2Arctg
Régime transitoire Régime permanent

36
Remarques :
- Les expressions des paramètres α et ϕ peuvent aussi être obtenues en faisant porter les calculs sur les nombres complexes associés aux variations sinusoïdales de la force et du déplacement :
F(t) = t..je.F)t.cos(.F ω↔ω et x(t) = )t..(je.)t.cos(. ϕ−ωα↔ϕ−ωα .
L'image de l'équation : )t.(cos.mF
x.'x...2"x 2oo ω=ω+ωβ+ est la relation sur les complexes :
[ ] [ ] [ ] t..j)t..(j2o
)t..(jo
)t..(j22 e.mF
e..e...j...2e...j ωϕ−ωϕ−ωϕ−ω =αω+αωωβ+αω .
On en tire immédiatement :
ωωβ+ω−ω
=α ϕ−
...2.j)(.m
Fe.
o22
o
.j
ou encore :
ωωβ−ω−ω
ωωβ+ω−ω
=α ϕ− ...2.j)(....4)(.m
Fe. o
22o22
o2222
o
.j .
On retrouve l'amplitude α et la phase ϕ en identifiant les modules et les arguments. - Les résultats obtenus peuvent être présentés sous forme adimensionnelle en faisant apparaître
un rapport d’amplitudes α / αo et une pulsation réduite ω / ωo , où αo est l'élongation du ressort sous une force statique de valeur F, et ωo la pulsation propre du système sans amortissement :
k/Fo =α et m/ko =ω On écrit pour ce faire : On en déduit les expressions réduites :
2222o n..4)n1(
1
β+−=
αα
et 2n1
n..2tg
−
β=ϕ avec
on
ωω
=
Notons que d'après la relation : ω = 2.π .ν, la variable n peut être indifféremment considérée
comme une pulsation réduite : ω / ωo ou comme une fréquence réduite : ν / νo. - Les tracés des fonctions G(n) et ϕ(n) sont les courbes de réponse en fréquence du système :
- G(n) = α / αo est la courbe de gain en amplitude, - ϕ(n) = ϕ est la courbe de déphasage.
On donne à la page suivante les allures de ces courbes pour diverses valeurs d'amortissement.
ωω
β+
ωω
−ω
=αα
2o
22
2
2o
24o
o..41.
1.mk
et
ωω
−ω
ωω
βω=ϕ
2o
22o
o
2o
1.
..2.tg .
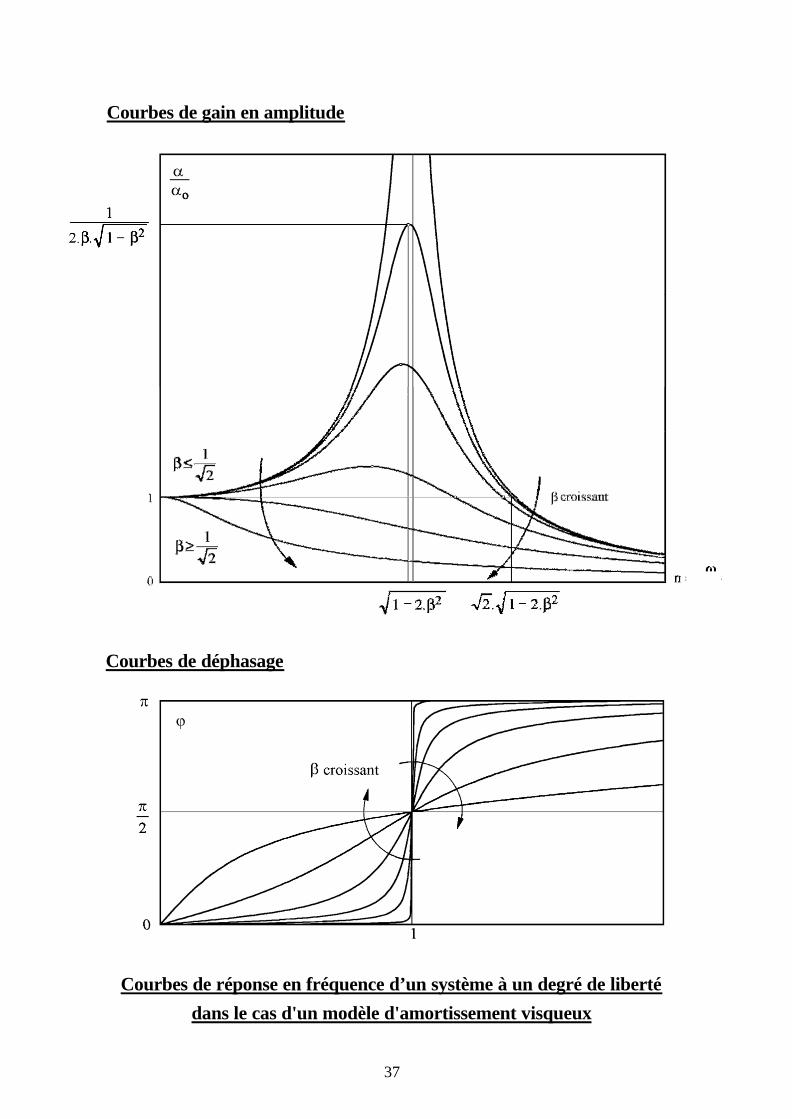
37
Courbes de gain en amplitude
Courbes de déphasage
Courbes de réponse en fréquence d’un système à un degré de liberté
dans le cas d'un modèle d'amortissement visqueux

38
c - 2 - Pulsations de résonance et bande passante à - 3 dB
- Le maximum de la fonction : 2222 n..4)n1(
1)n(G
β+−= est atteint lorsque :
0)n.2.(.4)n.2)(n1.(2.n..4)n1(.21
dndG 222
32222 =
β+−−
β+−−=
−
soit, lorsque : [ )n1(.2 22 −−β ].n = 0. On en tire les abscisses : 2.21net0n β−== . La première solution est nulle et indépendante du taux d’amortissement β . La courbe de gain présentera donc toujours une tangente horizontale à l’origine. Notons que ce résultat justifie que pour de faibles pulsations de la force excitatrice, on assimile la déformation maximale du ressort à une déformation statique déterminée en considérant la valeur maximale de cette force.
La seconde solution donne une pulsation fonction du taux d’amortissement β , mais qui n'est définie que pour un taux inférieur à 1 2 . La courbe de gain ne présentera donc un maximum décalé par rapport à l'origine que dans le cas où la constante c sera inférieure à 70 % de la valeur d’amortissement critique du système. Dans ce cas, l'abscisse du maximum de la courbe de gain correspondra à une pulsation dite de résonance. Cette pulsation et la valeur du gain associé sont données par les expressions :
2max .21n β−= et
2max1..2
1G
β−β= ou pour β << 1 : 1n max ≈ et
β≈
.21
Gmax
D'après ces expressions, lorsque le taux d'amortissement augmente et tend vers la valeur 0.7, la pulsation pour laquelle la résonance se produit tend vers zéro et l'amplitude du mouvement à la résonance tend vers l'amplitude du déplacement qui serait induit par une force constante de valeur égale à l'amplitude de la force sinusoïdale appliquée. Au delà d'un taux de 70 %, le maximum de la courbe de gain se confond avec sa valeur à l'origine, on ne peut alors plus parler de phénomène de résonance. Cependant, pour la plupart des applications en mécanique, on ne cherchera pas, ou l'on ne parviendra pas, à disposer d'une valeur d'amortissement aussi élevée. Pour une suspension d'automobile par exemple, un amortissement trop fort aurait pour effet d'imposer à la caisse, la même vitesse et de fait le même déplacement vertical que les roues, lorsque le véhicule passe sur un dos d'âne. On perdrait donc la faculté d'isolation vibratoire et le confort apportée par la souplesse de la suspension. Remarque :
Nous avons défini la pulsation de résonance comme la pulsation pour laquelle l'amplitude du déplacement est maximum. C'est cette pulsation qui doit être considérée lorsqu'on s'intéresse à la déformation maximale du ressort. Cependant, dans le cadre d'une mesure, on accèdera plus souvent à l'amplitude de la vitesse ou à celle de l'accélération. Pour un déplacement sinusoïdal d'amplitude α, l'amplitude de la vitesse est α.ω = α.n.ωo et celle de l'accélération est α.n2.ωo
2. La recherche des maximums des fonctions G(n), n.G(n) et n2.G(n) conduit à distinguer plusieurs pulsations de résonance mais dont les écarts sont négligeables pour de faibles amortissements :
2otdéplacemen/r .21. β−ω=ω ovitesse/r ω=ω 2
oonaccélérati/r .21/ β−ω=ω
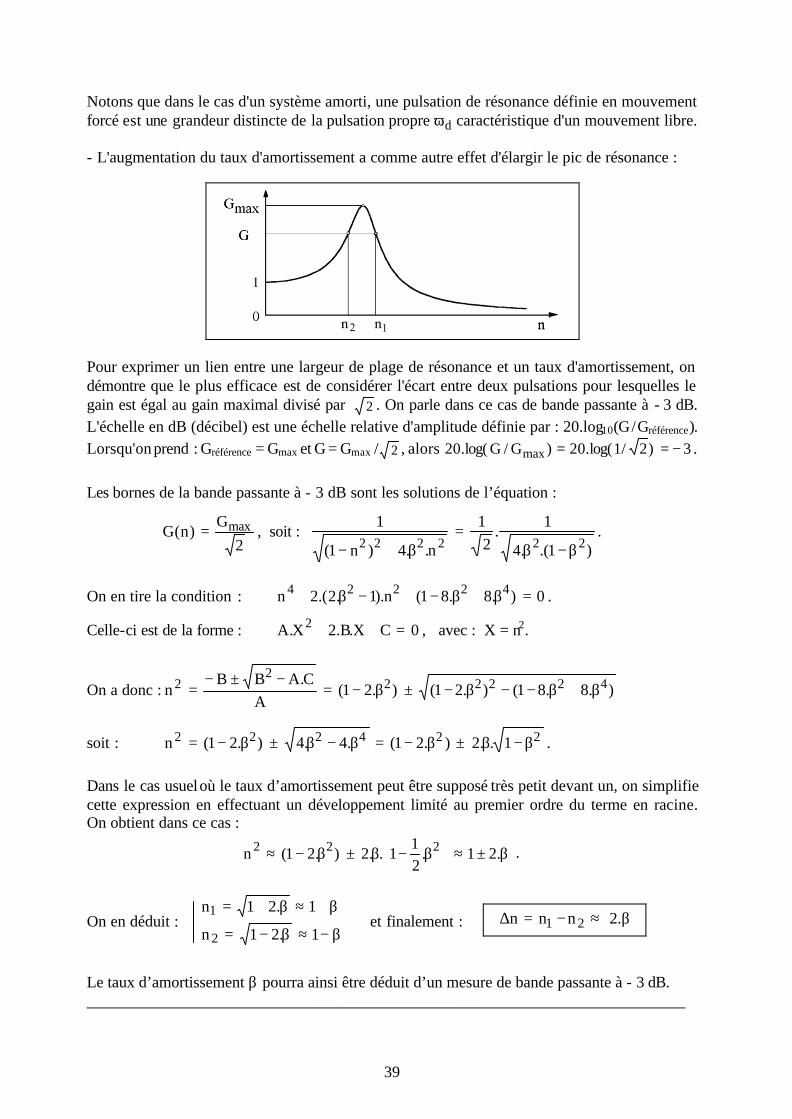
39
Notons que dans le cas d'un système amorti, une pulsation de résonance définie en mouvement forcé est une grandeur distincte de la pulsation propre ωd caractéristique d'un mouvement libre. - L'augmentation du taux d'amortissement a comme autre effet d'élargir le pic de résonance :
Pour exprimer un lien entre une largeur de plage de résonance et un taux d'amortissement, on démontre que le plus efficace est de considérer l'écart entre deux pulsations pour lesquelles le gain est égal au gain maximal divisé par 2 . On parle dans ce cas de bande passante à - 3 dB. L'échelle en dB (décibel) est une échelle relative d'amplitude définie par : 20.log10(G / Gréférence). Lorsqu'on prend : Gréférence = Gmax et G = Gmax / 2 , alors 3)2/1log(.20)G/Glog(.20 max −== . Les bornes de la bande passante à - 3 dB sont les solutions de l’équation :
2G
)n(G max= , soit : )1.(.4
1.
21
n..4)n1(
1222222 β−β
=β+−
.
On en tire la condition : 0).8.81(n).1.2.(2n 42224 =β+β−+−β+ .
Celle-ci est de la forme : 0CX.B.2X.A 2 =++ , avec : X = n2.
On a donc : ).8.81().21().21(A
C.ABBn 42222
22 β+β−−β−±β−=
−±−=
soit : 224222 1..2).21(.4.4).21(n β−β±β−=β−β±β−= . Dans le cas usuel où le taux d’amortissement peut être supposé très petit devant un, on simplifie cette expression en effectuant un développement limité au premier ordre du terme en racine. On obtient dans ce cas :
β±≈
β−β±β−≈ .21.
21
1..2).21(n 222 .
β+≈β+= 1.21n1
β−≈β−= 1.21n 2
≈−=∆ 21 nnn 2.β
Le taux d’amortissement β pourra ainsi être déduit d’un mesure de bande passante à - 3 dB. ___________________________________________________________________________
et finalement : On en déduit :
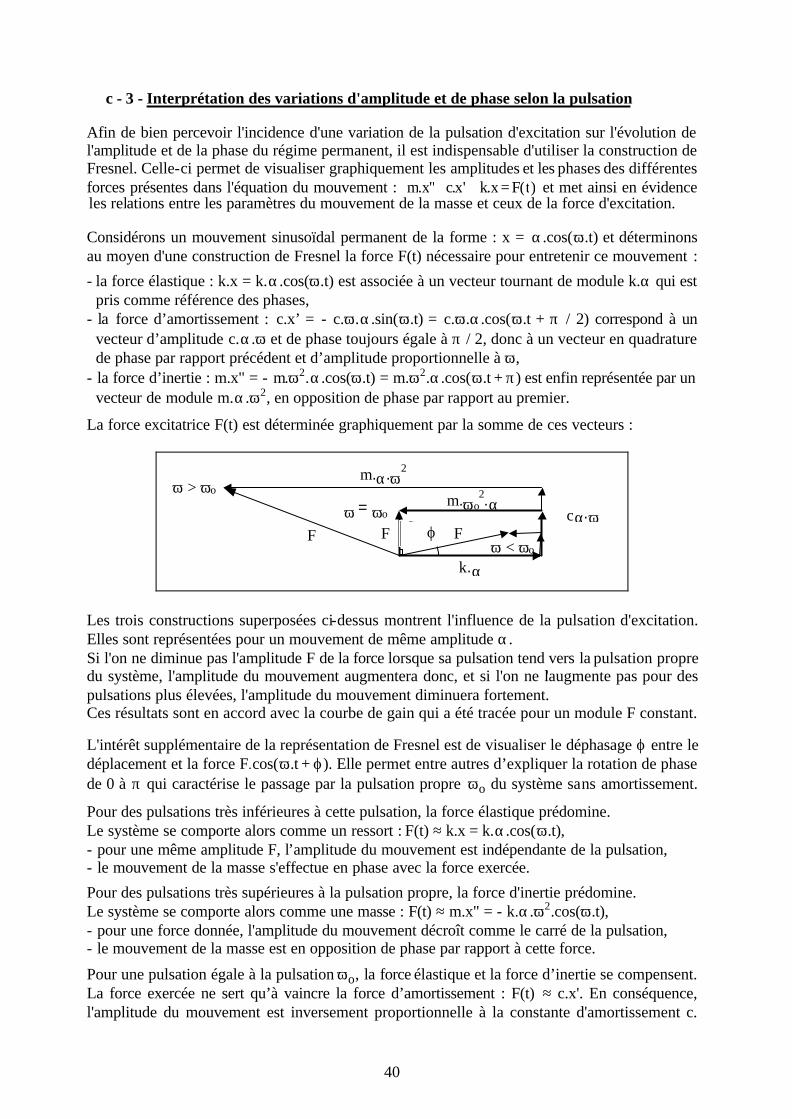
40
c - 3 - Interprétation des variations d'amplitude et de phase selon la pulsation Afin de bien percevoir l'incidence d'une variation de la pulsation d'excitation sur l'évolution de l'amplitude et de la phase du régime permanent, il est indispensable d'utiliser la construction de Fresnel. Celle-ci permet de visualiser graphiquement les amplitudes et les phases des différentes forces présentes dans l'équation du mouvement : )t(Fx.k'x.c"x.m =++ et met ainsi en évidence
Considérons un mouvement sinusoïdal permanent de la forme : x = α.cos(ω.t) et déterminons au moyen d'une construction de Fresnel la force F(t) nécessaire pour entretenir ce mouvement :
- la force élastique : k.x = k.α.cos(ω.t) est associée à un vecteur tournant de module k.α qui est pris comme référence des phases,
- la force d’amortissement : c.x’ = - c.ω.α.sin(ω.t) = c.ω.α.cos(ω.t + π / 2) correspond à un vecteur d’amplitude c.α.ω et de phase toujours égale à π / 2, donc à un vecteur en quadrature de phase par rapport précédent et d’amplitude proportionnelle à ω,
- la force d’inertie : m.x" = - m.ω2.α.cos(ω.t) = m.ω2.α.cos(ω.t + π) est enfin représentée par un vecteur de module m.α.ω2, en opposition de phase par rapport au premier.
La force excitatrice F(t) est déterminée graphiquement par la somme de ces vecteurs :
F F F ω < ωo
ω = ωo
k.α
m.ωo2.α
m.α.ω2
ω > ωo
2h.α.ω ϕ
Les trois constructions superposées ci-dessus montrent l'influence de la pulsation d'excitation. Elles sont représentées pour un mouvement de même amplitude α. Si l'on ne diminue pas l'amplitude F de la force lorsque sa pulsation tend vers la pulsation propre du système, l'amplitude du mouvement augmentera donc, et si l'on ne l'augmente pas pour des pulsations plus élevées, l'amplitude du mouvement diminuera fortement. Ces résultats sont en accord avec la courbe de gain qui a été tracée pour un module F constant.
L'intérêt supplémentaire de la représentation de Fresnel est de visualiser le déphasage ϕ entre le déplacement et la force F.cos(ω.t + ϕ). Elle permet entre autres d’expliquer la rotation de phase de 0 à π qui caractérise le passage par la pulsation propre ωo du système sans amortissement.
Pour des pulsations très inférieures à cette pulsation, la force élastique prédomine. Le système se comporte alors comme un ressort : F(t) ≈ k.x = k.α.cos(ω.t), - pour une même amplitude F, l’amplitude du mouvement est indépendante de la pulsation, - le mouvement de la masse s'effectue en phase avec la force exercée.
Pour des pulsations très supérieures à la pulsation propre, la force d'inertie prédomine. Le système se comporte alors comme une masse : F(t) ≈ m.x" = - k.α.ω2.cos(ω.t), - pour une force donnée, l'amplitude du mouvement décroît comme le carré de la pulsation, - le mouvement de la masse est en opposition de phase par rapport à cette force.
Pour une pulsation égale à la pulsation ωo, la force élastique et la force d’inertie se compensent. La force exercée ne sert qu’à vaincre la force d’amortissement : F(t) ≈ c.x'. En conséquence, l'amplitude du mouvement est inversement proportionnelle à la constante d'amortissement c.
les relations entre les paramètres du mouvement de la masse et ceux de la force d'excitation.
c

41
c - 4 - Calcul de l'énergie dissipée par cycle Le travail d’une force est égal au produit de son module et de la projection du déplacement de son point d’application sur la direction de la force.
Lorsqu’on multiplie l’équation du mouvement par un déplacement élémentaire x’.dt de la masse et lorsqu’on intègre l’équation obtenue entre deux instants t1 et t2, on passe d’une relation qui lie des forces à une relation entre les travaux de ces forces. Ainsi : )dt'.x).(t.(cos.F)dt'.x'.(x.c)dt'.x.(x.k)dt'.x".(x.m ω=++
⇒ ( ) ( ) ∫∫ ω=+−+− 2
1
2
1
t
t
t
t22
122
21
22 dt'.x).t.(cos.Fdt.'x.cxx.k.
21
'x'x.m.21
.
Les termes de cette équation représentent :
- la variation d’énergie cinétique de la masse, - la variation de l’énergie de déformation du ressort, - le travail de la force d’amortissement, - le travail de la force d’excitation.
Lorsqu’on considère en particulier deux instants séparés par une période T, les positions et les vitesses de la masse sont par définition les mêmes aux instants t1 et t2. L’équation précédente se réduit alors à l’égalité :
∫∫ ω=TT
2 dt'.x).t.(cos.Fdt.'x.c .
Ce résultat indique que lorsque le mouvement est permanent, l'énergie fournie au système par la force d'excitation est dissipée dans l'amortisseur. Une fois la loi du mouvement déterminée, on pourra donc calculer l'énergie fournie à un système en considérant les énergies dissipées par cycle, par l'ensemble des phénomènes dissipatifs liés au mouvement. Dans le cas présent :
[ ]∫∫ ϕ−ωωα==T
2T
2d dt.)t.(sin...cdt.'x.cE
2T
...c 22 ωα= .
D'où en utilisant la relation T = 2.π / ω : 2
d ...cE απω=
Remarques :
- La puissance dissipée est définie par le rapport : Ed / T. Elle varie en fonction de la pulsation comme le produit α2.ω2. Elle est maximale lorsque l'amplitude α.ω de la vitesse est maximale, c'est-à-dire à la résonance de vitesse : ωo. Pour cette pulsation : m.x" = - k.x et F(t) = c.x'. On peut interpréter ces deux relations d'un point de vue énergétique en disant que la masse et le ressort s'échangent en permanence des énergies égales et que la force d'excitation doit en conséquence fournir à tout instant l'énergie dissipée dans l'amortisseur.
Dans ce cas, la force d'excitation est en phase avec la vitesse et son travail n'est jamais résistant.
- Cependant, l'amplitude α du mouvement est maximale pour une pulsation de résonance ωr différente de ωo. Celle-ci n'est pas non plus égale à la pulsation propre ωd du système amorti. Lorsqu’on exerce une force, on ne maîtrise pas l’énergie fournie au système. Seul le principe fondamental de la dynamique permet de déterminer une loi du mouvement. Les approches énergétiques ne doivent être considérées que comme des interprétations a posteriori de ces lois.

42
3 - Système avec amortissement structural a - Introduction L'amortissement structural caractérise un phénomène dissipatif d'énergie propre aux matériaux. Parmi les essais effectués pour quantifier les propriétés d'un matériau, l'un des plus connus est l'essai de traction. Celui-ci consiste à soumettre une éprouvette normalisée à un effort croissant et à mesurer sa variation de longueur. Le résultat de cet essai est une courbe (on obtient le plus souvent une droite) dont la pente caractérise la raideur de l'éprouvette en fonction du matériau :
F
x
k H
F
x 0
f 2x.k.21
=?
dx
Par définition, l'aire de la surface comprise entre la courbe d'effort et l'axe x de l'allongement représente le travail de la force exercée pour déformer l'éprouvette : .
Dans le domaine des déformations élastiques, ce travail correspond à une énergie de déformation qui peut être potentiellement restituée par la matière. Cependant, lorsqu'on réalise un essai de traction / compression cyclique, il apparaît que l'on ne récupère jamais la totalité de l'énergie qui a été fournie. Cet essai consiste à soumettre une éprouvette à une force variable selon une loi sinusoïdale et à tracer l'effort exercé en fonction de la variation de longueur de l'éprouvette. Lorsqu'un régime permanent est établi, on n'obtient pas une droite, alternativement parcourue dans un sens puis dans l'autre, mais une ellipse :
F(t) x(t) = α.cos(ω.t)
k 2h
F(t)
x(t)
Ce résultat indique que le travail fourni pour déformer l'éprouvette n'est pas en totalité récupéré lorsque l'éprouvette reprend sa forme. L'aire de l'ellipse correspond à l'énergie dissipée au cours de chaque cycle du mouvement. Lorsqu'il se déforme, un matériau possède donc une capacité naturelle à dissiper de l'énergie. On sait par exemple que les vibrations des cordes d'une guitare ou d'une cloche s'amortissent. De telles observations conduisent à caractériser un matériau à la fois par une raideur et par un amortissement. On parle dans ce cas d'amortissement structural ou hystérétique (par référence à l'hystérésis qui est observée sur le diagramme force - déplacement).
∫= dx.fT
T

43
b - Définition du modèle d'amortissement structural Considérons un système à un degré de liberté constitué par une masse guidée en translation et attachée à un plot élastique. Si l'amortissement apporté par ce plot était par nature visqueux, l'énergie dissipée par ce système devrait être fonction de l'amplitude α du mouvement et de sa pulsation ω. Nous avons montré en effet, que l'énergie dissipée par un amortisseur visqueux est donnée par l'expression :
∫∫ πωα===T
2T amortd ...cdt'.x'.x.cdx.FE .
Or, l'expérience montre que pour une même amplitude, l'énergie dissipée par un plot élastique est quasiment indépendante de la pulsation d'excitation. Afin de coller au mieux à cette réalité, le modèle d'amortissement structural est défini comme un modèle d'amortissement visqueux dans lequel la "constante" d'amortissement c est inversement proportionnelle à la pulsation ω.
On obtient bien, dans ce cas, une énergie dissipée qui ne dépend pas de la pulsation, puisque :
ω=
Ctec ⇒ πα=πωα= .Cte...c.E 22
d .
Remarques :
- Au travers de cet artifice rudimentaire, on ne prétend pas mettre en équations les phénomènes physiques représentés par l'amortissement interne des matériaux. Le but est avant tout d'établir un modèle d'amortissement qui permette de simuler l'amortissement associé aux déformations de la matière et d'obtenir pour ce type d'amortissement, une meilleure corrélation entre des résultats de simulations et d'essais que celle obtenue avec le modèle d'amortissement visqueux.
- On écrira dans la suite : ω
=h
c , avec h une constante d'amortissement structural.
- La différence entre les modèles d'amortissement visqueux et structural peut être explicitée en
considérant les expressions correspondantes de la force d'amortissement. Dans le cas du modèle d'amortissement visqueux, cette force est donnée par l'expression :
)t.sin(...c'x.cFamort ωωα=−= .
Elle est en opposition de phase par rapport à la vitesse et son amplitude est proportionnelle à l'amplitude α.ω de la vitesse. Dans le cas du modèle d'amortissement structural, cette expression devient :
)t.sin(..h'x.h
Famort ωα=ω
−= .
Dans ce cas, la force d'amortissement est toujours de sens opposé au sens de la vitesse, mais son amplitude est proportionnelle à l'amplitude α du déplacement et non à celle de la vitesse. L'amortissement matériaux est ainsi défini en fonction de l'amplitude des déformations et non de la rapidité avec laquelle elles sont produites.
- La définition de l'amortissement structural est liée à la notion de pulsation, donc à une loi du mouvement de forme sinusoïdale, alors que la définition d'une force d’amortissement visqueux est rattachée à la notion générale de vitesse. Le modèle structural sera donc d'un usage limité.

44
c - Courbes de réponse en fréquence
c - 1 - Expressions du gain et du déphasage Considérons une masse m liée à un support par l’intermédiaire d’un plot élastique équivalent à un ensemble ressort + amortisseur, de raideur k et de constante d’amortissement structural h.
x m
k
F.cos (ω.t)
A
Le mouvement permanent produit par une force F.cos(ω.t) est de la forme : x = α.cos(ω.t - ϕ). Lorsqu’on reporte cette solution particulière dans l’équation du mouvement :
)t.(cos.Fx.k'x.h
"x.m ω=+ω
+
on obtient : )t.(cos.F)t.(cos..k)t.(sin...h
)t.(cos...m 2 ω=ϕ−ωα+ϕ−ωαωω
−ϕ−ωαω−
⇒ )t.(cos.F)t.(sin..h)t.(cos.)..mk( 2 ω=ϕ−ωα−ϕ−ωαω− . Le regroupement des deux termes en sinus et cosinus conduit à l’égalité :
( ) )t.(cos.F.mk
hArctgt.cos.h).mk(. 2
222 ω=
ω−
−−ϕ−ω+ω−α .
On en tire par identification :
222
kh.
km1.k
F
+
ω−
=α et
ω−
=ϕ2.
km1.k
hArctg
Dans ces expressions : F / k = αo et k / m = ωo2. Le rapport h / k est un nombre sans dimension.
Il est appelé coefficient d’amortissement structural. Nous le noterons η. On écrit finalement :
222o )( n1
1
η+−=
αα et
−
η=ϕ 2n1
Arctg
avec :
on
ωω= ,
mk
o =ω et kh=η
h

45
Remarques :
- La force que le plot exerce sur la masse est représentée par la somme de la force élastique et de la force d’amortissement, soit en régime sinusoïdal établi :
)t.(sin..h)t.(cos..k'x.h
x.k ϕ−ωα−ϕ−ωα=ω
+ .
Cette somme peut être écrite sous la forme :
( ))(Arctg)t.(cos.1.k. 2 η+ϕ−ωη+α . Au signe près, cette expression est celle de la force que l'on doit exercer sur le plot lors d'essais de caractérisation au cours desquels on lui impose une élongation d'amplitude donnée, variable selon une loi sinusoïdale. On retire d'un tel essai une valeur du coefficient d'amortissement η. Celle-ci est obtenue en calculant la tangente du déphasage mesuré entre les variations de la force et de la longueur. Ce déphasage traduit un décalage entre l'effet (la variation de longueur) et la cause (la force exercée sur le plot). Ce décalage est dû à l'existence d'une composante d'amortissement hystérétique en phase avec la vitesse et non avec le déplacement.
De plus, en raison de cette composante, le rapport de proportionnalité entre l'amplitude de la force exercée sur le plot et l'amplitude de sa variation de longueur n'est pas égal à la raideur statique du plot. On traduit cette différence en introduisant la notion de raideur dynamique. D'après l'expression ci-dessus, la raideur dynamique d'un plot est liée à sa raideur statique et à la capacité d'amortissement du matériau par la relation :
2statiquedynamique 1.kk η+= .
- Les expressions du gain et du déphasage auraient pu être établies en faisant porter les calculs
sur les nombres complexes associés aux variations sinusoïdales de la force et du déplacement :
F(t) = t..je.F)t.cos(.F ω↔ω et x(t) = )t..(je.)t.cos(. ϕ−ωα↔ϕ−ωα .
L'image de l'équation : )t.(cos.Fx.k'x.h
"x.m ω=+ω
+ est la relation sur les complexes :
[ ] [ ] [ ] t..j)t..(j)t..(j)t..(j22 e.Fe..ke...j.h
e...j.m ωϕ−ωϕ−ωϕ−ω =α+αωω
+αω ,
soit, après simplifications : Fkh.j.m.e. )( 2.j =++ω−α ϕ− , d'où l'égalité :
η+−
α=
η++ω−=α ϕ−
.j)n1().j1.(k.m
Fe. 2
o2
.j
On en extrait α et ϕ par identification du module et de l'argument.
- Le terme k.(1 + j.η) = ηη =η+ .jdynamique
.j2 e.ke.1.k est la raideur complexe du plot.
On donne à la page suivante les allures des courbes de réponse en fréquence du système pour diverses valeurs du coefficient d’amortissement η.
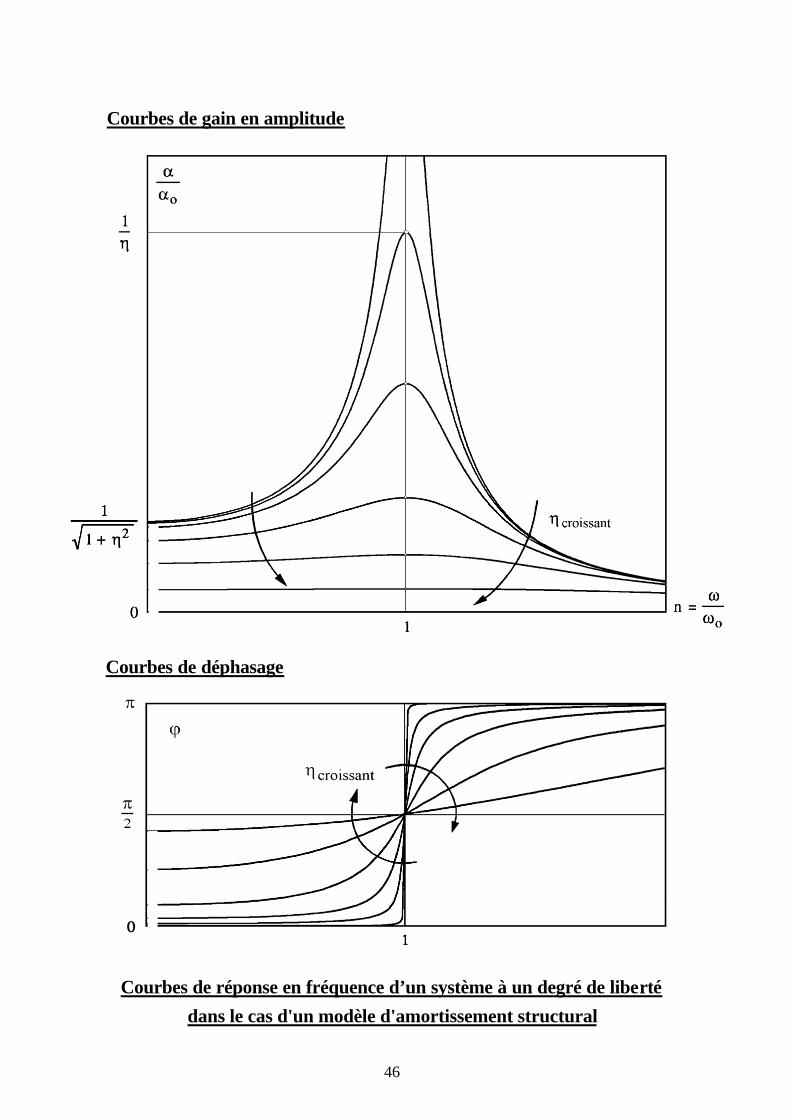
46
Courbes de gain en amplitude
Courbes de déphasage
Courbes de réponse en fréquence d’un système à un degré de liberté
dans le cas d'un modèle d'amortissement structural

47
c - 2 - Comparaison des effets des amortissements visqueux et structural Différences lorsqu'on augmente l'amortissement d'un système donné
Dans le cas du modèle d'amortissement structural, la valeur à l'origine du gain en amplitude est :
21
1)0(Gη+
=
Elle est fonction du coefficient d'amortissement. Pour un système donné, une augmentation de l'amortissement structural se traduira donc par une diminution de l'amplitude du mouvement y compris pour de très faibles pulsations. Le comportement quasi statique du système ne sera donc pas déterminé par la seule raideur du ressort. Cette différence par rapport à l'effet d'un amortissement visqueux est la conséquence de la définition de la force d'amortissement. Dans le cas d'un amortissement visqueux, celle-ci est proportionnelle à l'amplitude α.ω de la vitesse. Ses effets en basses fréquences sont donc négligeables. Alors que dans le cas d'un amortissement structural, le module de la force d'amortissement est directement proportionnel à l'amplitude α du déplacement. Ses effets apparaissent donc dès qu'il y mouvement, quelle que soit la pulsation de ce mouvement. La notion de raideur dynamique se substitue alors à celle de raideur statique. Le gain passe par un extremum pour une fréquence réduite telle que :
[ ] [ ] 0)n.2).(n1.(2.)n1(.21
dndG 22
3222 =−−η+−−=
−.
On en tire les abscisses : n = 0 et n = 1. La valeur maximale du gain est : η
=1
Gmax
Par rapport au modèle d'amortissement visqueux, la valeur de l’amortissement n’influe pas sur la pulsation de résonance. Celle-ci est donc égale à la pulsation propre du système non amorti. Convergence lorsqu'on diminue l'amortissement
Une différence de modèle d'amortissement entraîne une différence de comportement en fonction de la fréquence, mais cette différence est peu marquée pour de faibles amortissements. En effet, lorsqu’on diminue l’amortissement d'un système, que cet amortissement soit de type visqueux ou de type structural, les courbes de réponse en fréquence tendent à se confondre avec celles qui seraient obtenues sans amortissement.
La question de la nature d'un amortissement se pose essentiellement lorsqu'on veut simuler le comportement en fréquence d'un système au stade de la conception ou bâtir une modélisation à partir de résultats d'essais. Il importe alors de choisir le type d'amortissement qui représente au mieux l'amortissement réel. Pour de forts taux d'amortissements, une mauvaise adaptation du modèle d'amortissement peut introduire de forts écarts entre les amplitudes calculées et les amplitudes mesurées pour différentes fréquences. Par contre, pour de faibles amortissement, les modèles visqueux et structural deviennent sensiblement équivalents et peuvent être utilisés indifféremment l'un de l'autre. Selon le modèle retenu, la différence sera la donnée ou la mesure soit d'un taux d’amortissement β , soit d'un coefficient d’amortissement η.
Notons que dans le cas où l'on admet que les modèles d'amortissement visqueux et structural sont équivalents, les deux expressions du gain pour la pulsation ωo : β= .21)1(G et η= 1)1(G permettent d'établir la relation :
β=η .2

48
c - 3 - Représentation dans le plan de Nyquist et Bande passante à - 3 dB Les tracés des courbes de réponse d'un système sous la forme d’un module G et d’une phase ϕ en fonction de la fréquence ou de la pulsation d'excitation constituent la représentation de Bode. La représentation de Nyquist consiste à tracer la partie imaginaire G.sin ϕ en fonction de la partie réelle G.cos ϕ. Ces deux représentations contiennent les mêmes informations présentées différemment. Elles peuvent être utilisées, l'une comme l'autre, afin de comparer des résultats de mesure et des résultats de simulation. Lorsqu'on effectue cette comparaison, l'interprétation des écarts nécessite de déterminer les caractéristiques de masse, de raideur et d'amortissement du système à partir de ses courbes de réponse mesurées. C'est sur ces paramètres physiques que peut porter un éventuel recalage du modèle de calcul. Il importe donc de connaître les relations entre ces paramètres physiques et les points remarquables des courbes de réponse d'un système. Dans le cas de la représentation de Bode, on sait qu'une résonance est révélée par un maximum de la courbe de gain et une rotation de phase. Afin de découvrir les propriétés de la représentation de Nyquist, référons nous à l’expression :
η+−
α=α ϕ−
.j)n1(e. 2
o.j .
Lorsqu’on multiplie le numérateur et le dénominateur de ce rapport par le conjugué complexe du dénominateur, on obtient :
222
2.j
o )n1(
.j)n1(e.
η+−
η−−=
αα ϕ− , or : ϕ−ϕ==
αα ϕ−ϕ− sin.G.jcos.Ge.Ge. .j.j
o.
On en tire les expressions de la partie réelle et de la partie imaginaire :
G.cos ϕ = 222
2
)n1(
n1
η+−
− et G.sin ϕ = 222)n1( η+−
η.
On démontre à partir de ces expressions que la réponse en fréquence d'un système à un degré de liberté est un cercle dans la représentation de Nyquist.
___________________________________________________________________________
Démonstration :
Si l’on forme la quantité : 2
2.21
YX
η
−+ avec : X = G.cos ϕ et Y = G.sin ϕ,
on obtient un résultat indépendant de la variable n.
En effet : 222222222
222
222
.4
1
.4
1
)n1(
1
)n1(
)n1(
.4
1YYX
η=
η+
η+−−
η+−
η+−=
η+
η−+ .
Or : 2
22
.4
1.21
YXη
=
η
−+ est l’équation d’un cercle de centre 01
2,
.η
et de rayon
12.η
.
___________________________________________________________________________
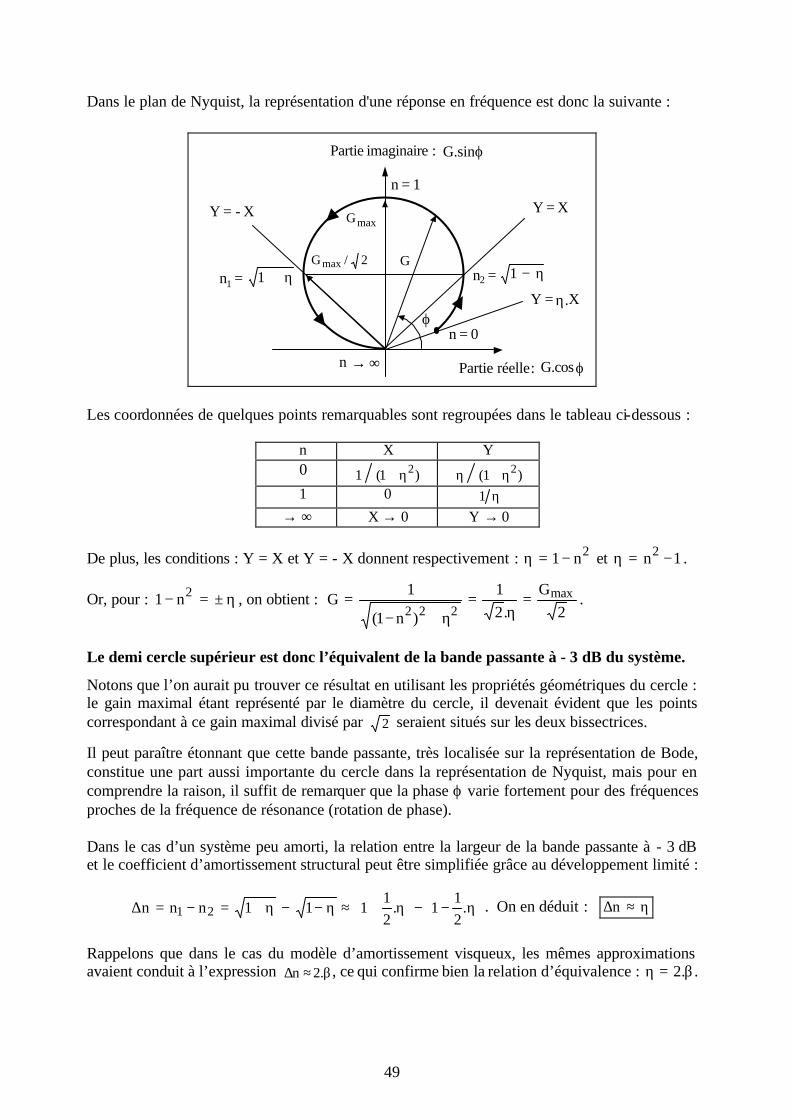
49
Dans le plan de Nyquist, la représentation d'une réponse en fréquence est donc la suivante :
Gmax
Gmax / 2
ϕ
G
Partie imaginaire :
n = 0
n → ∞
n = 1
n1 = 1 + η n2 = 1 − η Y = η.X
Y = X Y = - X
Partie réelle : G.cos ϕ
G.sin ϕ
Les coordonnées de quelques points remarquables sont regroupées dans le tableau ci-dessous :
n X Y 0 )1(1 2η+ )1( 2η+η 1 0 η1
→ ∞ X → 0 Y → 0
De plus, les conditions : Y = X et Y = - X donnent respectivement : 2n1−=η et 1n2 −=η .
Or, pour : η±=− 2n1 , on obtient : 2
G.2
1
)n1(
1G max
222=
η=
η+−= .
Le demi cercle supérieur est donc l’équivalent de la bande passante à - 3 dB du système.
Notons que l’on aurait pu trouver ce résultat en utilisant les propriétés géométriques du cercle : le gain maximal étant représenté par le diamètre du cercle, il devenait évident que les points correspondant à ce gain maximal divisé par 2 seraient situés sur les deux bissectrices.
Il peut paraître étonnant que cette bande passante, très localisée sur la représentation de Bode, constitue une part aussi importante du cercle dans la représentation de Nyquist, mais pour en comprendre la raison, il suffit de remarquer que la phase ϕ varie fortement pour des fréquences proches de la fréquence de résonance (rotation de phase). Dans le cas d’un système peu amorti, la relation entre la largeur de la bande passante à - 3 dB et le coefficient d’amortissement structural peut être simplifiée grâce au développement limité :
η−−
η+≈η−−η+=−=∆ .
21
1.21
111nnn 21 . On en déduit : η≈∆n
Rappelons que dans le cas du modèle d’amortissement visqueux, les mêmes approximations avaient conduit à l’expression β≈∆ .2n , ce qui confirme bien la relation d’équivalence : β=η .2 .
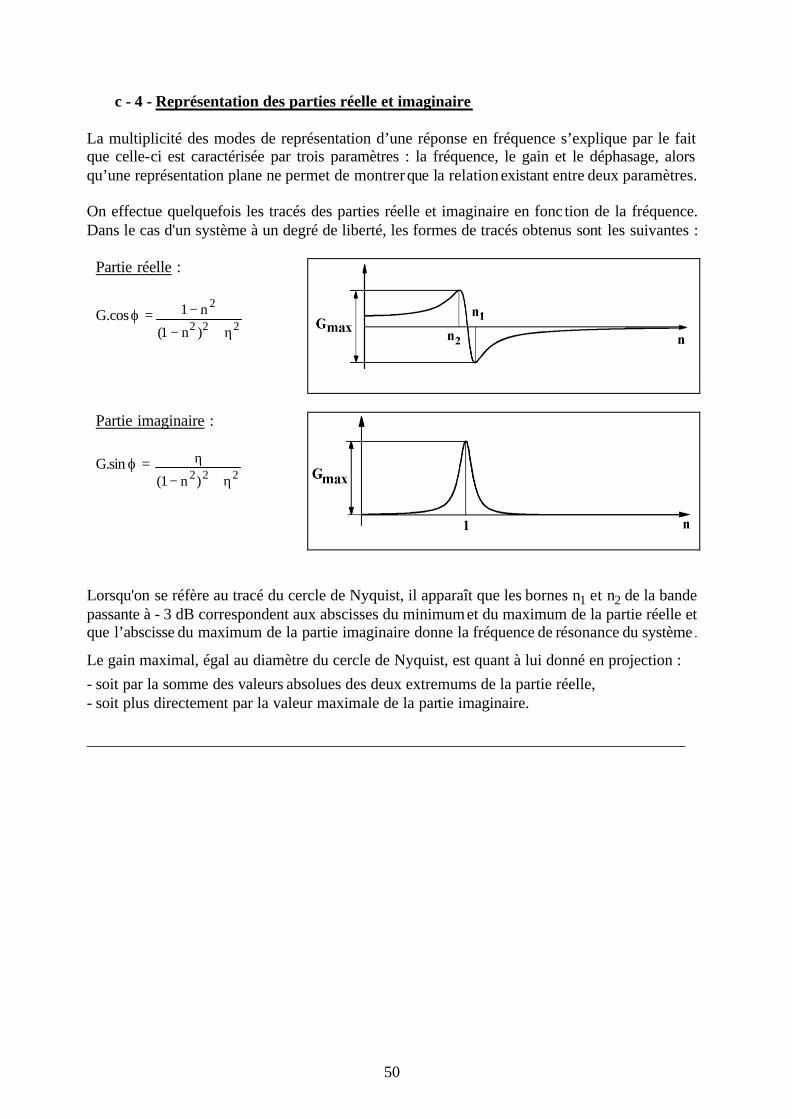
50
c - 4 - Représentation des parties réelle et imaginaire La multiplicité des modes de représentation d’une réponse en fréquence s’explique par le fait que celle-ci est caractérisée par trois paramètres : la fréquence, le gain et le déphasage, alors qu’une représentation plane ne permet de montrer que la relation existant entre deux paramètres. On effectue quelquefois les tracés des parties réelle et imaginaire en fonc tion de la fréquence. Dans le cas d'un système à un degré de liberté, les formes de tracés obtenus sont les suivantes : Partie réelle :
G.cos ϕ = 222
2
)n1(
n1
η+−
−
Partie imaginaire :
G.sin ϕ = 222)n1( η+−
η
Lorsqu'on se réfère au tracé du cercle de Nyquist, il apparaît que les bornes n1 et n2 de la bande passante à - 3 dB correspondent aux abscisses du minimum et du maximum de la partie réelle et que l’abscisse du maximum de la partie imaginaire donne la fréquence de résonance du système .
Le gain maximal, égal au diamètre du cercle de Nyquist, est quant à lui donné en projection :
- soit par la somme des valeurs absolues des deux extremums de la partie réelle, - soit plus directement par la valeur maximale de la partie imaginaire. ___________________________________________________________________________
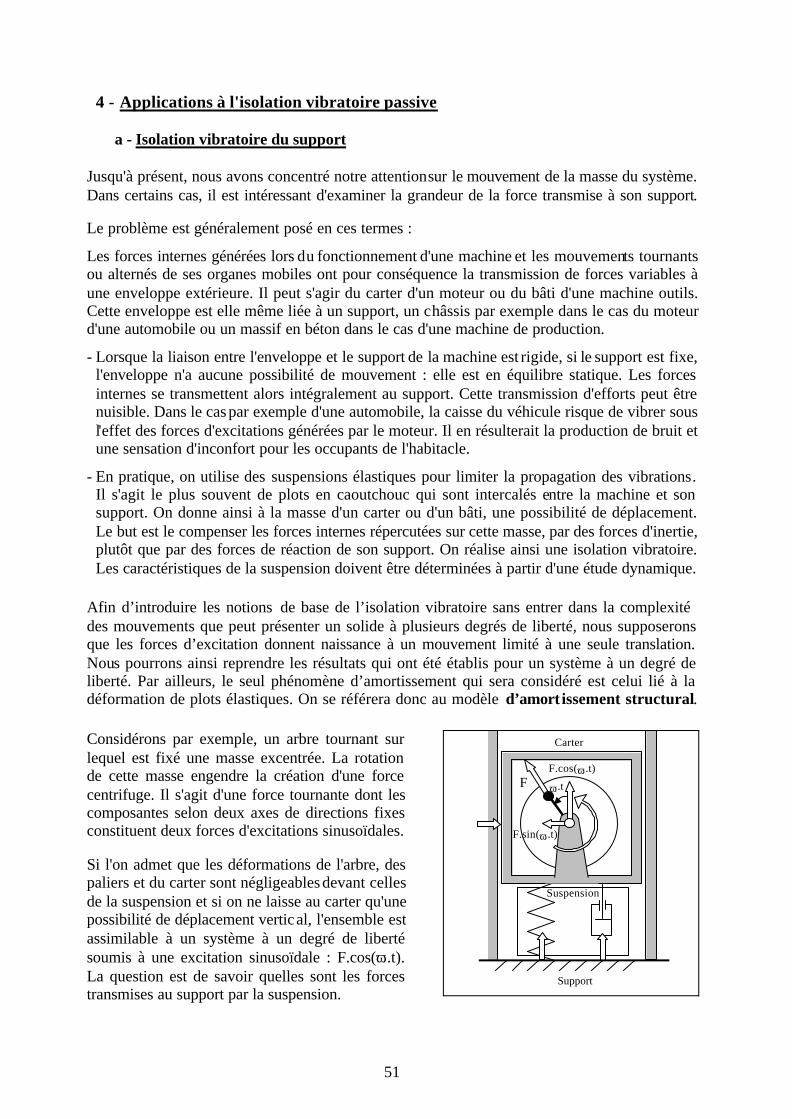
51
4 - Applications à l'isolation vibratoire passive a - Isolation vibratoire du support Jusqu'à présent, nous avons concentré notre attention sur le mouvement de la masse du système. Dans certains cas, il est intéressant d'examiner la grandeur de la force transmise à son support. Le problème est généralement posé en ces termes :
Les forces internes générées lors du fonctionnement d'une machine et les mouvements tournants ou alternés de ses organes mobiles ont pour conséquence la transmission de forces variables à une enveloppe extérieure. Il peut s'agir du carter d'un moteur ou du bâti d'une machine outils. Cette enveloppe est elle même liée à un support, un châssis par exemple dans le cas du moteur d'une automobile ou un massif en béton dans le cas d'une machine de production.
- Lorsque la liaison entre l'enveloppe et le support de la machine est rigide, si le support est fixe, l'enveloppe n'a aucune possibilité de mouvement : elle est en équilibre statique. Les forces internes se transmettent alors intégralement au support. Cette transmission d'efforts peut être nuisible. Dans le cas par exemple d'une automobile, la caisse du véhicule risque de vibrer sous l'effet des forces d'excitations générées par le moteur. Il en résulterait la production de bruit et une sensation d'inconfort pour les occupants de l'habitacle.
- En pratique, on utilise des suspensions élastiques pour limiter la propagation des vibrations. Il s'agit le plus souvent de plots en caoutchouc qui sont intercalés entre la machine et son support. On donne ainsi à la masse d'un carter ou d'un bâti, une possibilité de déplacement. Le but est le compenser les forces internes répercutées sur cette masse, par des forces d'inertie, plutôt que par des forces de réaction de son support. On réalise ainsi une isolation vibratoire. Les caractéristiques de la suspension doivent être déterminées à partir d'une étude dynamique.
Afin d’introduire les notions de base de l’isolation vibratoire sans entrer dans la complexité des mouvements que peut présenter un solide à plusieurs degrés de liberté, nous supposerons que les forces d’excitation donnent naissance à un mouvement limité à une seule translation. Nous pourrons ainsi reprendre les résultats qui ont été établis pour un système à un degré de liberté. Par ailleurs, le seul phénomène d’amortissement qui sera considéré est celui lié à la déformation de plots élastiques. On se référera donc au modèle d’amort issement structural. Considérons par exemple, un arbre tournant sur lequel est fixé une masse excentrée. La rotation de cette masse engendre la création d'une force centrifuge. Il s'agit d'une force tournante dont les composantes selon deux axes de directions fixes constituent deux forces d'excitations sinusoïdales. Si l'on admet que les déformations de l'arbre, des paliers et du carter sont négligeables devant celles de la suspension et si on ne laisse au carter qu'une possibilité de déplacement vertical, l'ensemble est assimilable à un système à un degré de liberté soumis à une excitation sinusoïdale : F.cos(ω.t). La question est de savoir quelles sont les forces transmises au support par la suspension.
F F.cos(ω.t)
F.sin(ω.t)
ω.t
Support
Suspension
Carter
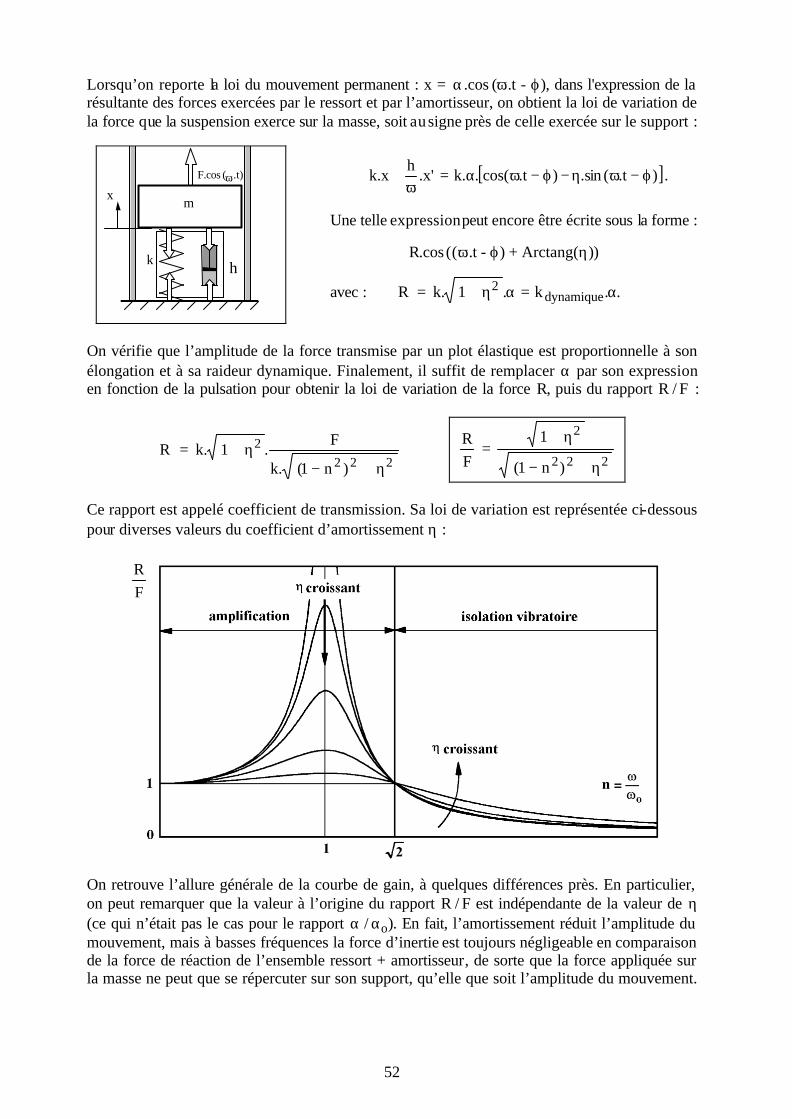
52
Lorsqu’on reporte la loi du mouvement permanent : x = α.cos (ω.t - ϕ), dans l'expression de la résultante des forces exercées par le ressort et par l’amortisseur, on obtient la loi de variation de la force que la suspension exerce sur la masse, soit au signe près de celle exercée sur le support :
x
k
F.cos (ω.t)
A
m
[ ])t.(sin.)t.(cos..k'x.h
x.k ϕ−ωη−ϕ−ωα=ω
+ .
Une telle expression peut encore être écrite sous la forme :
R.cos ((ω.t - ϕ) + Arctang(η))
avec : ..k.1.kR dynamique2 α=αη+=
On vérifie que l’amplitude de la force transmise par un plot élastique est proportionnelle à son élongation et à sa raideur dynamique. Finalement, il suffit de remplacer α par son expression en fonction de la pulsation pour obtenir la loi de variation de la force R, puis du rapport R / F :
2222
)n1(.k
F.1.kR
η+−η+= ⇒
222
2
)n1(
1
FR
η+−
η+=
Ce rapport est appelé coefficient de transmission. Sa loi de variation est représentée ci-dessous pour diverses valeurs du coefficient d’amortissement η :
On retrouve l’allure générale de la courbe de gain, à quelques différences près. En particulier, on peut remarquer que la valeur à l’origine du rapport R / F est indépendante de la valeur de η (ce qui n’était pas le cas pour le rapport α / αo). En fait, l’amortissement réduit l’amplitude du mouvement, mais à basses fréquences la force d’inertie est toujours négligeable en comparaison de la force de réaction de l’ensemble ressort + amortisseur, de sorte que la force appliquée sur la masse ne peut que se répercuter sur son support, qu’elle que soit l’amplitude du mouvement.
FR
h

53
L'isolation vibratoire du support sera effective si le module R de la force qui est lui est transmise est très inférieur au module F de la force exercée sur la masse. Il faut pour cela que : n >> 2 .
Lorsque la fréquence de la force excitatrice est connue, du fait qu'elle est liée à une vitesse de rotation par exemple, la raideur de la suspension doit être déterminée en fonction de l'atténuation voulue à cette fréquence. Si l'on admet que pour n >> 2 , le coefficient de transmission dépend peu de l'amortissement, alors on peut se référer à l'expression simplifiée :
1n
1FR
2 −≈
Pour que l'effort transmis représente par exemple moins de 20 % de l'effort exercé sur la masse, il faut que :
En d'autres termes : pour transmettre peu d'effort au support, la solution consiste à donner de la souplesse à la suspension afin que la force exercée par le ressort devienne comparativement plus faible que la force d’inertie reprise par la masse. Notons que pour répondre aux problèmes de l'isolation vibratoire, on n'a pas intérêt à avoir un amortissement car la force d'amortissement est une force supplémentaire transmise au support. Cependant, il ne faut pas oublier les phases de démarrage et d’arrêt d'une machine au cours desquelles la vitesse varie et un passage par la fréquence de résonance basse est inévitable. Il est alors utile de disposer d’un amortissement suffisant pour limiter l’amplitude du mouvement, surtout si l'excitation à la résonance est prolongée du fait d'une variation de vitesse trop lente. C’est la raison pour laquelle on ne cherchera pas à diminuer l’amortissement, bien que cela puisse être profitable dans la zone de réduction des efforts transmis. Remarques : - Certains fabricants de suspensions élastiques font plutôt référence au modèle d’amortissement
visqueux dans lequel ils font évoluer le taux d’amortissement β en fonction de la pulsation ω en posant β .ω = βo.ωo (ce qui revient implicitement à conserver un modèle d’amortissement structural, mais avec les notations du modèle visqueux). Pour retrouver la formule qu’ils proposent, il suffit de remplacer η par 2.βo, βo étant la valeur particulière du taux d’amortissement β mesurée lorsque le système est excitée à sa pulsation propre ωo. Ce choix est peu judicieux car il peut faire croire que le coefficient βo relevé à la pulsation propre du système, dépend de la masse en mouvement. Ce n'est pas le cas. Seules la raideur et la capacité d'amortissement du matériau déterminent la valeur de ce coefficient.
Démonstration : 2k.2
hk.m2.
.ck.m.2
c
o
oooo
η==
ωω
==β , ∀ m.
- A titre indicatif, le taux d'amortissement βo pour des plots en caoutchouc naturel est compris
entre 0,02 et 0,1. Pour ces plots, le coefficient η sera donc compris entre 0,04 et 0,2. - L’isolation acoustique est en partie basée sur le principe de l'isolation vibratoire : une plaque
massive et une épaisseur de mousse souple jouent le rôle d'un système à un degré de liberté qui ne doit pas transmettre les ondes de pression incidentes à la cloison qui lui sert de support.
2.01n
12 <
− ⇒ n > 2,5 ⇒ ωo < 0,4.ω ⇒ 2.m.16,0k ω< .

54
b - Isolation vibratoire de la masse L'isolation vibratoire peut revêtir deux aspects. Il peut s'agir, comme on l'a considéré dans le paragraphe précédent, de limiter la transmission d'une force exercée sur une masse en comptant sur son inertie. Le rôle de la suspension est alors de permettre à la masse d'avoir un mouvement sans que son support bouge. Mais il peut aussi s’agir de limiter le mouvement d'une masse, lorsque son support bouge. On en donne ci-dessous deux exemples d'applications :
- Dans le cas d’une automobile, les défauts de planéité d'une route horizontale se ramènent à des conditions de déplacement vertical imposées en base de roues. Il est souhaitable pour le confort de ses occupants que ces déplacements ne soient pas répercutés sur la caisse du véhicule. Le rôle de la suspension est d'éviter que la caisse se déplace verticalement autant que les roues.
- Dans le cas d’une habitation exposée à un risque de tremblement de terre, les fondations ont pour rôle de soutenir la construction, mais aussi de l'isoler des mouvements sismiques du sol.
Afin d’initier le lecteur à la mise en équations de ce type de problèmes, nous allons reprendre l’étude d’un système à un degré de liberté et examiner le cas où la source d’excitation est un mouvement sinusoïdal u(t) imposé à la base du système :
m
k
F.cos (ω.t)
A H
δs x = α.cos (ω.t - ϕ)
u = αo.cos (ω.t)
Nous profiterons de cette autre approche pour rappeler que le poids de la masse est sans effet sur le mouvement vibratoire du système considéré.
Le déplacement x(t) de la masse sera compté à partir de la position d'équilibre qu’elle occupe lorsque la base du système est fixe. On écrira donc : u = 0 ⇒ x = 0.
Dans ces conditions, la variation de longueur du ressort par rapport à l'équilibre est à chaque instant représentée par le déplacement relatif (x - u) de ses extrémités. Cet écart correspond à un allongement lorsque x est supérieur à u. Pour exprimer la variation de longueur du ressort par rapport à sa longueur à vide H, il faut retrancher à cet allongement, l'écrasement initial sous l'effet du poids de la masse m, soit : δs = m.g / k. La vitesse du déplacement relatif des extrémités de l’amortisseur est quant-à-elle donnée par la différence des vitesses absolues de ces deux points, indépendamment de leurs positions initiales. L'équation du mouvement est donc :
m.x" = - k.(x - u - δs) - ωh
.(x' - u') - m.g
soit, après simplifications :
m.x" + ωh
.x' + k.x = ωh
.u' + k.u.
h

55
Les termes au second membre de cette équation sont homogènes à des forces. Ces termes sont fonctions du déplacement imposé. Dans le cas d'une excitation sinusoïdale : u(t) = αo.cos(ω.t), la somme k.αo.cos(ω.t) - h.αo.sin(ω.t) est équivalente à un terme unique F.cos(ω.t - ψ), tel que :
2o
22o 1.k.hk.F η+α=+α= et η−=−=ψ
kh
tg .
Avec ces dernières notations, l'équation du mouvement s'écrit sous la forme :
m.x" + ωh
.x' + k.x = F.cos(ω.t - ψ).
Cette équation est identique à celle du mouvement d’un système dont la base est fixe et dont la
masse est soumise à une force F(t). La phase ψ dépend de l'origine des temps. Elle n'influe pas sur l'amplitude de la solution x(t). Pour obtenir l'expression de cette amplitude en fonction de celle du mouvement imposé à la base du système, il suffit de reprendre l'expression déjà établie :
222)n1(.k
F
η+−=α , dans laquelle on reporte : 2
o 1.k.F η+α= .
On obtient ainsi : Remarques : - Les expressions du rapport des amplitudes α / αo et du coefficient de transmission R / F sont
identiques. Il n'y a donc pas, du point de vue théorique, de différence fondamentale entre une isolation vibratoire de la masse du système et une isolation vibratoire de son support : dans les deux cas, l'isolation sera réalisée au moyen d'un ressort suffisamment souple pour qu'un déplacement relatif de la masse et du support entraîne la transmission d'un effort admissible.
S'il faut chercher une différence, on la trouvera dans l'aspect pratique du problème, car si l'on connaît assez bien les fréquences des forces produites lors du fonctionnement d’une machine, il est par contre difficile d'appréhender les fréquences des sources de vibrations environnantes.
- L'expression des rapports α / αo et R / F qui serait obtenue en considérant un amortissement de type visqueux peut être déduite de celle établie dans le cas d'un amortissement structural. Il suffit de remplacer dans l'expression précédente η2 par 4.β2.n2. En effet, d'après la relation :
ω=
hc , alors : n..2..2
m/k.
k.m.2c.2.
k.k.m.2
.k.m.2
ck.c
kh
oβ=
ωωβ=ω=
ω=ω==η .
On notera au passage que la relation η = 2.β permet de faire coïncider les valeurs d'amplitudes à la résonance et de largeurs de bande passante à - 3 dB calculées en se référant à l'un ou l'autre des modèles d'amortissement, mais qu'il ne s'agit là que d'une relation de recalage au voisinage de la pulsation propre ωo. Les courbes de réponse en fréquence tracées pour des valeurs de η et de β , liées par cette relation, se superposeront au niveau des pics de résonance, mais la variation de la force d'amortissement en fonction de la pulsation est différente selon le modèle d'amortissement et interdira que les courbes de réponse se confondent pour toutes valeurs de n.
222
2
o )n1(
1
η+−
η+=
αα

56
5 - Définitions et propriétés des courbes de réponse en fréquence Les courbes de réponse en fréquence représentent les relations d'amplitude et de phase entre deux grandeurs physiques liées par une relation de cause à effet, lorsque les lois de variations de ces grandeurs sont sinusoïdales. Dans le cas où l'on étudie le comportement vibratoire d'un système, on peut choisir de s'intéresser à la vitesse ou à l'accélération plutôt qu'au déplacement. On forme alors différents rapports dont les plus courants sont ceux listés ci-dessous :
DESIGNATION DEFINITION
Raideur dynamique Force / Déplacement Impédance mécanique Force / Vitesse Masse apparente Force / Accélération
DESIGNATION DEFINITION
Réceptance Déplacement / Force Mobilité Vitesse / Force Inertance Accélération / Force
Notons que la réceptance et l'inertance sont quelquefois appelées l'admittance et l'accélérance. Remarques :
- La vitesse et l'accélération sont liées au déplacement par les relations de dérivation : x’ = j.ω.x et x" = - ω2.x. Il en résulte que les gains et les déphasages des rapports de mobilité et d'inertance sont liés à ceux de la réceptance. Les correspondances sont les suivantes :
Réceptance : gain G, déphasage ϕ ⇔ Mobilité : ω.G, ϕ + π / 2 ⇔ Inertance : ω2.G, ϕ + π .
- Sur la page ci-contre, on donne les courbes de gain d'un système à un degré de liberté, tracées
en portant en abscisse le logarithme de la pulsation et en ordonnée le logarithme du gain. L’intérêt d'une échelle log - log est qu’elle permet de mettre en évidence les comportements asymptotiques d'un tel système. Si l’on se souvient de l’interprétation physique des courbes de réponse en fréquence, on aura retenu que pour de faibles pulsations, c'est la force élastique qui s'oppose au déplacement, alors que pour des pulsations élevées, c'est la force d'inertie qui s'oppose au mouvement. La loi de comportement d’un système masse - ressort - amortisseur se confond ainsi avec celle de son ressort lorsque la pulsation d’excitation tend vers zéro et avec celle de sa masse lorsque cette pulsation tend vers l’infini.
> Pour un ressort de raideur k : la relation F(t) = F.cos(ω.t) = k.x ⇒ k1
F=
α = constante.
klogFlog −=
α , kloglogF.log −ω=
αω et kloglog.2F.log 2 −ω=
αω .
> Pour une masse de valeur m : F(t) = F.cos(ω.t) = m.x" ⇒ m1
F
2=
αω . = constante.
mlogF.log 2 −=
αω , mloglogF.log −ω−=
αω et mloglog.2Flog −ω−=
α .
Un ressort ou une masse sont donc caractérisés par une réceptance, une mobilité, une inertance
dont la variation du gain en échelle log - log est représentée par une droite. Signalons que l'on quantifie habituellement les pentes de ces droites en les exprimant par décade. Une décade correspond à une multiplication par 10 de la fréquence. Or log(10.ω) = 1 + log(ω). Si l’on trace alors 20 fois le logarithme du gain en fonction de log(ω), on obtient selon le cas, des droites de pentes 0, 20 ou 40 dB / décade pour un ressort et - 40, - 20 ou 0 dB / décade pour une masse.
On en déduit :
On en déduit :
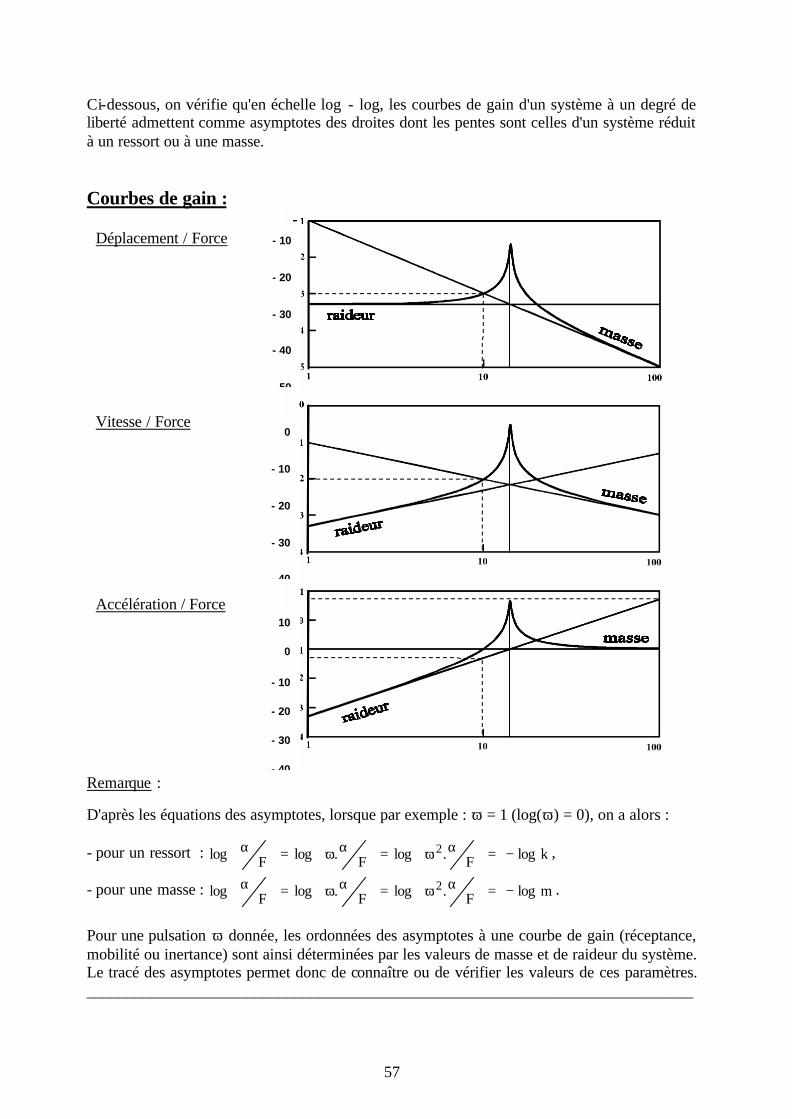
57
Ci-dessous, on vérifie qu'en échelle log - log, les courbes de gain d'un système à un degré de liberté admettent comme asymptotes des droites dont les pentes sont celles d'un système réduit à un ressort ou à une masse.
Courbes de gain : Déplacement / Force Vitesse / Force Accélération / Force
Remarque :
D'après les équations des asymptotes, lorsque par exemple : ω = 1 (log(ω) = 0), on a alors :
- pour un ressort : =
αFlog =
αω F.log klogF.log 2 −=
αω ,
- pour une masse : =
αFlog =
αω F.log mlogF.log 2 −=
αω .
Pour une pulsation ω donnée, les ordonnées des asymptotes à une courbe de gain (réceptance, mobilité ou inertance) sont ainsi déterminées par les valeurs de masse et de raideur du système. Le tracé des asymptotes permet donc de connaître ou de vérifier les valeurs de ces paramètres. ____________________________________________________________________________
- 10
- 20
- 30
- 40
- 50
0
- 10
- 20
- 30
- 40
10
0
- 10
- 20
- 30
- 40

58
QUE RETENIR DES PARAGRAPHES PRECEDENTS ? Outre les nombreux termes de vocabulaire qui ont été introduits (pulsation propre, fréquence de résonance, taux d’amortissement, réponse en fréquence…) et quelques expressions utiles ( m/ko =ω , expressions du gain et du déphasage…), il importe de retenir les points suivants :
- Soumis à une excitation sinusoïdale dont la fréquence est croissante, le comportement d’un système à un degré de liberté passe du comportement d’un ressort à celui d’une masse. - Entre ces deux extrêmes, le fait qu'une masse puisse posséder de l’énergie cinétique et qu'un ressort puisse emmagasiner de l’énergie de déformation, entraîne l’existence d’un mouvement libre au cours duquel la masse déforme le ressort et le ressort met en mouvement la masse. - En l'absence de phénomènes dissipatifs, aucune force extérieure n'est nécessaire pour entretenir ce mouvement. Dans ce cas, l'apport d’énergie résultant de l’action d’une force extérieure se traduit par une augmentation de l’amplitude du mouvement jusqu'à ce que des déformations excessives du ressort conduisent à une destruction du système (phénomène de résonance). - Afin d'éviter cette destruction, le système doit posséder une capacité à dissiper de l’énergie. Lorsque l'amplitude du mouvement augmente, l'énergie dissipée croît alors, en proportion de l’amplitude du déplacement ou de celle de la vitesse du mouvement, jusqu'à ce qu'un équilibre énergétique soit atteint pour une amplitude déterminée. Cette dernière est fonction du taux d'amortissement du système. Elle est d'autant plus petite que le taux d'amortissement est élevé.
- A la différence des caractéristiques de masse et de raideur, l’amortissement d’un système est une grandeur difficilement quantifiable, ne serait-ce que parce qu’il revêt différentes formes, le plus souvent combinées.
- Tant qu’il reste faible, l’effet de l’amortissement n’apparaît que lorsque les termes de masse et de raideur se compensent, c’est-à-dire à la résonance du système. Il limite alors l’amplitude du mouvement vibratoire mais n’en modifie pas grandement la fréquence. Il est ainsi permis d’estimer la valeur d'une fréquence de résonance, sans connaître l’amortissement du système. La connaissance de l'amortissement ne sera nécessaire que si l’on désire accéder à l’amplitude du mouvement. Mais compte tenu de ce qui a été dit ci-dessus, une mesure sera indispensable.
Remarque :
L’importance que l’on a accordée à la description des courbes de gain (dans le cadre a priori restreint des systèmes à un degré de liberté) est justifiée par le fait que les particularités qui ont été démontrées se retrouveront dans l’ interprétation des courbes de réponse des systèmes à plusieurs degrés de liberté. Nombre de résultats qui ont été établis seront donc repris lors de l'étude de ces systèmes.
________________________________________________________________________
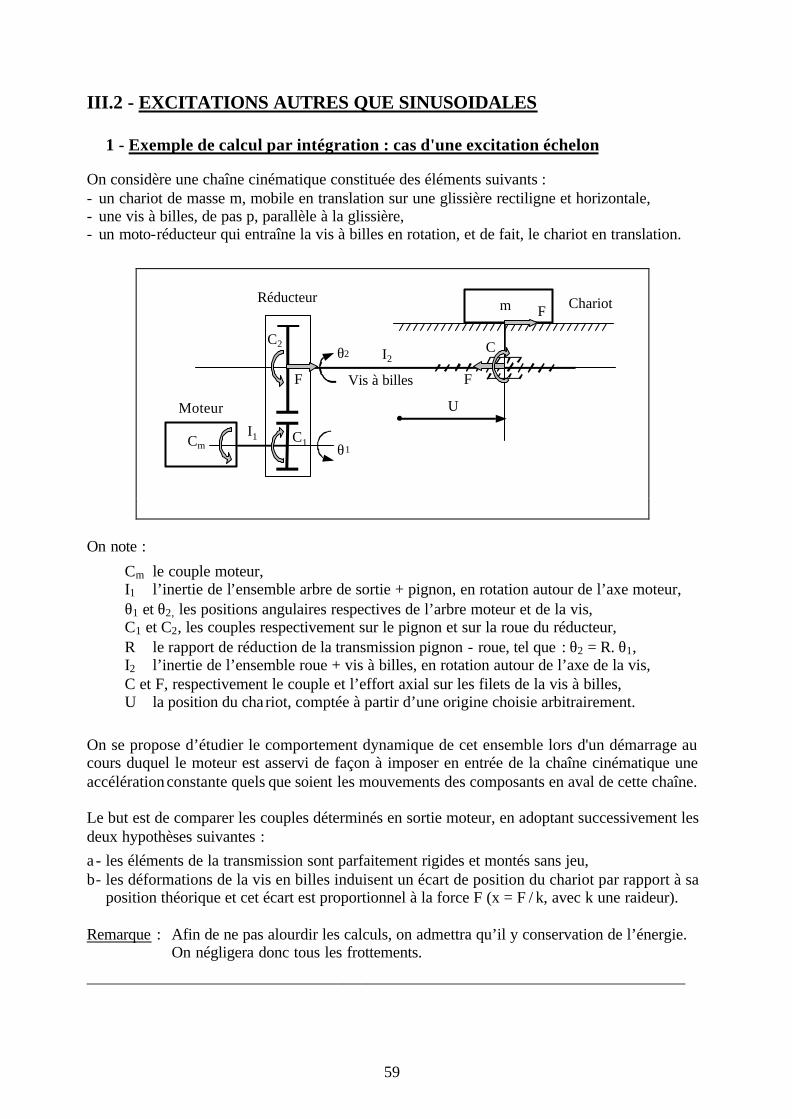
59
III.2 - EXCITATIONS AUTRES QUE SINUSOIDALES 1 - Exemple de calcul par intégration : cas d'une excitation échelon On considère une chaîne cinématique constituée des éléments suivants : - un chariot de masse m, mobile en translation sur une glissière rectiligne et horizontale, - une vis à billes, de pas p, parallèle à la glissière, - un moto-réducteur qui entraîne la vis à billes en rotation, et de fait, le chariot en translation.
m
U
Réducteur
Moteur
Vis à billes
Chariot
Cm θ1
θ2
I1
I2 C2
C1
C
F
F F
On note :
Cm le couple moteur, I1 l’inertie de l’ensemble arbre de sortie + pignon, en rotation autour de l’axe moteur, θ1 et θ2, les positions angulaires respectives de l’arbre moteur et de la vis, C1 et C2, les couples respectivement sur le pignon et sur la roue du réducteur, R le rapport de réduction de la transmission pignon - roue, tel que : θ2 = R. θ1, I2 l’inertie de l’ensemble roue + vis à billes, en rotation autour de l’axe de la vis, C et F, respectivement le couple et l’effort axial sur les filets de la vis à billes, U la position du chariot, comptée à partir d’une origine choisie arbitrairement. On se propose d’étudier le comportement dynamique de cet ensemble lors d'un démarrage au cours duquel le moteur est asservi de façon à imposer en entrée de la chaîne cinématique une accélération constante quels que soient les mouvements des composants en aval de cette chaîne. Le but est de comparer les couples déterminés en sortie moteur, en adoptant successivement les deux hypothèses suivantes :
a - les éléments de la transmission sont parfaitement rigides et montés sans jeu, b - les déformations de la vis en billes induisent un écart de position du chariot par rapport à sa
position théorique et cet écart est proportionnel à la force F (x = F / k, avec k une raideur). Remarque : Afin de ne pas alourdir les calculs, on admettra qu’il y conservation de l’énergie. On négligera donc tous les frottements.
___________________________________________________________________________

60
Hypothèse a : les éléments de la transmission sont parfaitement rigides Equations de base Le chariot est mis en mouvement sous l’effet d’une force axiale F, transmise par la vis à billes. Cette force résulte des actions de contact sur les filets de la vis. Ces mêmes actions contribuent à la création d’un couple C exercé sur l'axe de la vis à billes. Dans le cas où l'on néglige tout frottement, la relation entre le couple C et la force F peut être établie en écrivant que le travail du couple est égal au travail de la force. Lorsque la vis effectue un tour, le chariot se déplace de la valeur du pas. On en déduit la relation de conservation de l’énergie :
C.2.π = F.p. La vis est elle-même entraînée en rotation par l'engrenage du réducteur. A un couple C2 exercé sur la roue correspond un couple C1 exercé sur le pignon. Si l'on néglige toute perte d'énergie au contact des dentures, l'égalité des travaux des couples C1 et C2 révèle que les valeurs de ces couples sont dans le rapport inverse de celles des angles de rotation de la roue et du pignon :
C1.θ1 = C2.θ2 ⇒ C1 = C2.R. Si l'on compte positives les actions responsables des accélérations, les équations du mouvement s'écrivent : - pour le chariot : F = m.U" - pour la roue + vis à billes : C2 - C = I2.θ2" - pour l'arbre moteur + pignon : Cm - C1 = I1.θ1". Résolution La combinaison des relations cinématiques, des équations de conservation de l'énergie lors des transformations de mouvement et des équations du mouvement conduit à l'expression du couple :
"1
22
21m ..2R.p
.mR.IIC θ
π++=
Démonstration :
π
=.2p
.FC avec : F = m.U" ⇒ π
+θ=.2p
."U.m.IC "222
C1 = C2.R ⇒ R..2p
."U.m.I.IC "22
"11m
π+θ+θ= avec : 12 .R θ=θ et 12 .
.2R.p
..2p
U θπ
=θπ
= .
Dans l'expression du couple Cm, le terme en facteur de l'accélération est homogène à une inertie . Il s'agit de l'inertie équivalente de la chaîne cinématique, ramenée sur l'arbre de sortie moteur :
22
21eq .2R.p
.mR.III
π++=

61
Remarques : - D'après le résultat précédent, le couple nécessaire pour accélérer ou pour freiner une chaîne cinématique indéformable peut être déterminé en associant à chacun de ses éléments mobiles une inertie équivalente placée directement sur l'arbre de sortie moteur. On retiendra comme règle que cette inertie doit être égale au produit de l'inertie de l'élément considéré intervenant dans son mouvement de translation ou de rotation et du rapport des vitesses de ce mouvement et du mouvement de rotation de l'arbre moteur, élevé au carré. Cette conclusion peut être justifiée par une approche énergétique : le travail du couple moteur nécessaire pour produire une variation de vitesse est égal à la variation de l'énergie cinétique des éléments mobiles. Le report des inerties d'une chaîne cinématique sur l'arbre de sortie moteur impose donc que la somme des énergies cinétiques des éléments mobiles soit égale à l'énergie cinétique qui serait emmagasinée par leur inertie équivalente.
De l'égalité : 2'eq
2'ii
i
2ii
i.I.
21
.I.21
V.m.21
θ=θ+ ∑∑ , on tire immédiatement :
2
'
'i
ii
2
'i
iieq .I
V.mI
θθ
+
θ
= ∑∑
- Les degrés de liberté qui ont été considérés et les relations cinématiques qui ont été utilisées supposent l’absence de déformations notables des organes qui transmettent ou qui transforment les mouvements.
Au niveau du réducteur par exemple, la relation entre les angles de rotation des arbres d'entrée et de sortie ne tient pas compte d'un écart angulaire qui peut être dû à une flexion des dentures. Au niveau de la vis à billes, le choix de ne définir qu'un paramètre de rotation revient à négliger les effets de la torsion produite par les couples exercés aux extrémités. Les efforts axiaux ont quant à eux pour effet d'engendrer une sollicitation en traction - compression. Il en résulte une variation de la distance entre le réducteur et le chariot qui n'est pas lié à la rotation de la vis. Afin d'étudier les conséquences de ces déformations sans toutefois trop compliquer les calculs, nous allons limiter l'étude à la prise en compte des déformations en traction - compression de la vis. Pour ce faire, nous allons compléter le modèle de calcul en introduisant comme paramètre la variation de longueur de la vis sous l'effet des forces axiales. Nous noterons x ce paramètre.
Si l'on considère x positif lorsqu'il s'agit d'une diminution de longueur, alors la relation de proportionnalité entre l'effort de poussée sur le chariot et ce nouveau paramètre s'écrit : F = k.x, avec k une raideur qui dépend de la vis, et l'expression de la position du chariot devient : U - x. Notons que la prise en compte des déformations en torsion de la vis serait bien plus complexe (les couples C2 et C exercés aux deux extrémités de la longueur en torsion ne sont pas égaux) et ne permettrait pas de rester dans le cadre des systèmes vibrants à un degré de liberté (puisque l'angle de rotation serait progressivement variable le long de la vis, selon une loi à déterminer).

62
Hypothèse b : les déformations de la vis à billes sont non négligeables Equations et résolution Les équations des mouvements de rotation de la vis à billes et de l'arbre moteur sont inchangées.
Des relations : Cm - C1 = I1.θ1" C2 - C = I2.θ2" avec : ''
1''2 .R θ=θ et C1 = C2.R ,
on tire à nouveau : R.C).R.II(C "1
221m +θ+= avec toujours : C = F.p / 2.π .
L’équation du mouvement du chariot s’écrit désormais : F = m.(U" - x"). La force F n'est donc plus constante et égale à m.U". Elle varie en fonction de la loi d'accélération réelle du chariot. Cette dernière dépend de la déformation de la vis sous l'effet de la force F. On en tire l'égalité :
F = m.(U" - x") = k.x.
L'écart de position x est donc la solution de l'équation :
''U.mx.k"x.m =+ . Cette équation est celle d’un mouvement vibratoire superposé à la montée en vitesse du chariot. Notons que son second membre est un terme constant, puisque l'accélération U", imposée par l'asservissement moteur, est constante. Ce terme correspond à la force F exercée sur le chariot dans le cas où la chaîne cinématique est indéformable (x" = 0). Nous le noterons ci-dessous Fo.
La forme de la solution de l'équation du mouvement vibratoire est alors :
kF
)t.(sin.B)t.(cos.Ax ooo +ω+ω= .
A et B sont deux constantes qui doivent être fixées de façon à satisfaire aux conditions initiales, x = 0 et x' = 0 à l'instant t = 0, soit :
A + Fo / k = 0 ⇒ A = - Fo / k B.ωo = 0 ⇒ B = 0.
( ))t.(cos1.kF
x oo ω−=
L’effort de poussée correspondant est donné par la relation F = k.x. D’après le résultat ci-dessus, cet effort va croître dans les premiers instants du mouvement, de zéro à deux fois la valeur constante calculée dans le cas d’une transmission indéformable, puis osciller entre ces valeurs. Le couple moteur sera maximal lorsque l'effort de poussée sera maximal, soit lorsque le couple résistant C sera égal à : (2.Fo).p / 2.π .
( )
θ
π+θ+= "
1
2"1
221max .
.2R.p
.m..R.IIC 2
On établit ainsi l'expression :
On en déduit :
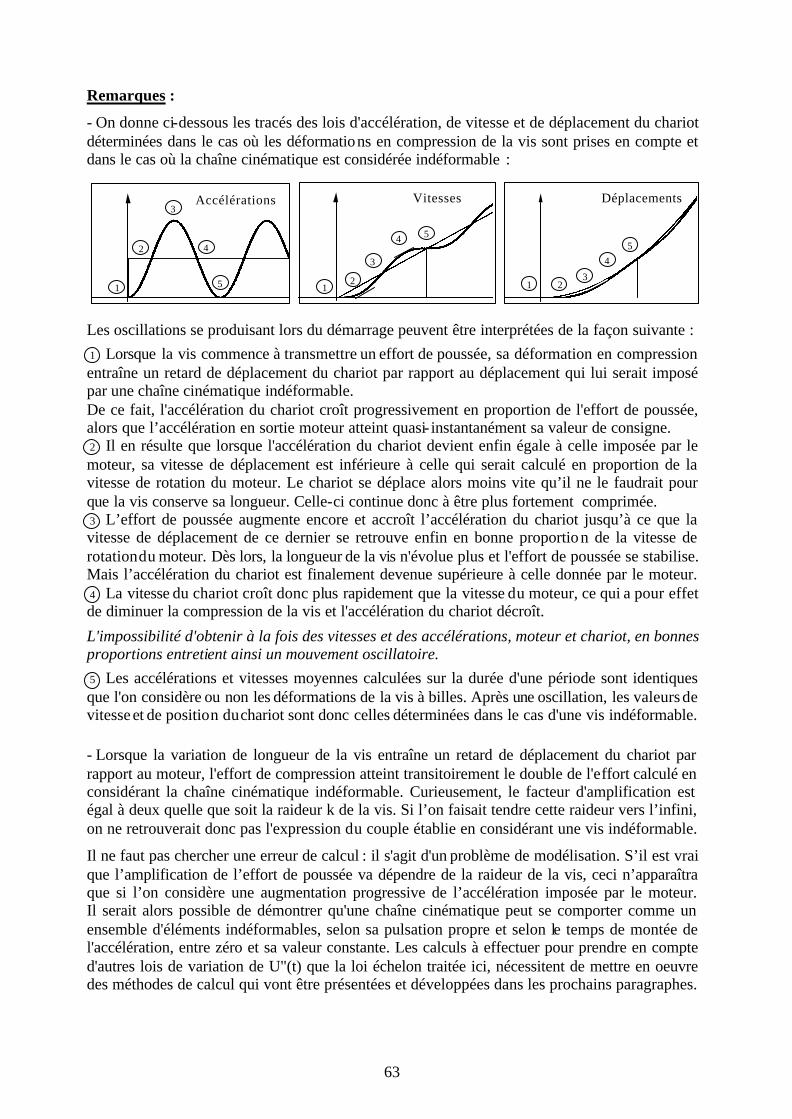
63
Remarques :
- On donne ci-dessous les tracés des lois d'accélération, de vitesse et de déplacement du chariot déterminées dans le cas où les déformations en compression de la vis sont prises en compte et dans le cas où la chaîne cinématique est considérée indéformable :
1
2
3
4
5
Accélérations
1
2
3
4 5
Vitesses
1 2
3
4 5
Déplacements
Les oscillations se produisant lors du démarrage peuvent être interprétées de la façon suivante :
1 Lorsque la vis commence à transmettre un effort de poussée, sa déformation en compression entraîne un retard de déplacement du chariot par rapport au déplacement qui lui serait imposé par une chaîne cinématique indéformable. De ce fait, l'accélération du chariot croît progressivement en proportion de l'effort de poussée, alors que l’accélération en sortie moteur atteint quasi- instantanément sa valeur de consigne. 2 Il en résulte que lorsque l'accélération du chariot devient enfin égale à celle imposée par le moteur, sa vitesse de déplacement est inférieure à celle qui serait calculé en proportion de la vitesse de rotation du moteur. Le chariot se déplace alors moins vite qu’il ne le faudrait pour que la vis conserve sa longueur. Celle-ci continue donc à être plus fortement comprimée. 3 L’effort de poussée augmente encore et accroît l’accélération du chariot jusqu’à ce que la vitesse de déplacement de ce dernier se retrouve enfin en bonne proportion de la vitesse de rotation du moteur. Dès lors, la longueur de la vis n'évolue plus et l'effort de poussée se stabilise. Mais l’accélération du chariot est finalement devenue supérieure à celle donnée par le moteur. 4 La vitesse du chariot croît donc plus rapidement que la vitesse du moteur, ce qui a pour effet de diminuer la compression de la vis et l'accélération du chariot décroît.
L'impossibilité d'obtenir à la fois des vitesses et des accélérations, moteur et chariot, en bonnes proportions entretient ainsi un mouvement oscillatoire.
5 Les accélérations et vitesses moyennes calculées sur la durée d'une période sont identiques que l'on considère ou non les déformations de la vis à billes. Après une oscillation, les valeurs de vitesse et de position du chariot sont donc celles déterminées dans le cas d'une vis indéformable. - Lorsque la variation de longueur de la vis entraîne un retard de déplacement du chariot par rapport au moteur, l'effort de compression atteint transitoirement le double de l'effort calculé en considérant la chaîne cinématique indéformable. Curieusement, le facteur d'amplification est égal à deux quelle que soit la raideur k de la vis. Si l’on faisait tendre cette raideur vers l’infini, on ne retrouverait donc pas l'expression du couple établie en considérant une vis indéformable.
Il ne faut pas chercher une erreur de calcul : il s'agit d'un problème de modélisation. S’il est vrai que l’amplification de l’effort de poussée va dépendre de la raideur de la vis, ceci n’apparaîtra que si l’on considère une augmentation progressive de l’accélération imposée par le moteur. Il serait alors possible de démontrer qu'une chaîne cinématique peut se comporter comme un ensemble d'éléments indéformables, selon sa pulsation propre et selon le temps de montée de l'accélération, entre zéro et sa valeur constante. Les calculs à effectuer pour prendre en compte d'autres lois de variation de U"(t) que la loi échelon traitée ici, nécessitent de mettre en oeuvre des méthodes de calcul qui vont être présentées et développées dans les prochains paragraphes.

64
2 - Bases des autres méthodes de calcul
a - Limites du champ d'application
a - 1 - Introduction L’étude d’un système masse - ressort - amortisseur a permis d’introduire la notion de réponse en fréquence. Ce système va encore servir d'exemple dans le cas d'excitations non sinusoïdales. Mais il faut être conscient que l'usage des méthodes présentées n'est pas limité à ce système. Ces méthodes découlent de notions très générales et peuvent être appliquées à des systèmes mécaniques plus complexes, voire à des systèmes d’autres natures.
Considérons par exemple, un circuit électrique composé d'une résistance, d'une self et d'un condensateur. La relation entre l’intensité du courant et la tension aux bornes du circuit est une équation de la forme :
∫++= dt.i.C1
i.Rdtdi
.LU
( x.k'x.c"x.mF ++= )
C
U(t)
R L
i(t)
Cette équation différentielle est similaire à celle décrivant le mouvement forcé d’un système à un degré de liberté (une analogie est établie si l'on remplace F par U, x par l’intégrale de i.dt...) C’est la raison pour laquelle nous adopterons un vocabulaire moins ciblé.
Les termes qui reviendront le plus souvent sont définis ci-après : __________________________________________________________________________________________
On appellera « système » un ensemble de phénomènes physiques qui associent deux grandeurs. L'une sera une cause et sa variation au cours du temps constituera un « signal d'entrée » e(t), l'autre sera un effet de cette cause et sa variation représentera un « signal de sortie » noté s(t). La relation entre les signaux d'entrée / sortie sera symbolisée comme suit :
Système
e(t) s(t)
Pour un système mécanique, on aura par exemple :
Système
F(t) x(t)
__________________________________________________________________________________________
Remarque :
Nous ne traiterons que de systèmes linéaires et invariants dans le temps, c'est-à-dire de systèmes possédant les propriétés rappelées dans le paragraphe ci-contre. Nous exposerons les méthodes et les outils de calcul qui permettent de prédire la réponse de tels systèmes dans le cas où la loi de variation du signal d'entrée n'est pas sinusoïdale.
L'intérêt commun des méthodes qui vont être présentées est la définition de caractéristiques intrinsèques au système qui pourront être obtenues expérimentalement (fonction de transfert, réponse impulsionnelle) et qui permettront de simuler son comportement sans pour autant que l'on ait obligatoirement mis en équations les phénomènes physiques étudiés.
Nous passerons sous silence les méthodes numériques d'intégration. Le champ d'application de ces méthodes s'étend aux systèmes non linéaires, ce qui en justifierait l'étude, mais leur base se résume à une intégration pas à pas d'équations au moyen de logiciels, ce qui fait que les exposer relève plus d'un cours de mathématique sur l'analyse numérique que de la Mécanique.

65
a - 2 - Propriétés d'un système linéaire et invariant dans le temps Lorsque les lois physiques qui régissent le comportement d'un système prennent la forme d’une équation différentielle linéaire à coefficients constants, telle que par exemple :
s.B...dt
sd.B
dtsd
.Be.A...dt
ed.A
dted
.A 11n
1n1nn
nn11m
1m1mm
mm +++=+++ −
−−−
−−
on dit que le système est linéaire et invariant dans le temps. L’intérêt de pouvoir admettre les hypothèses de linéarité et d’invariance dans le temps réside dans l’existence de méthodes, analytiques, numériques ou expérimentales, simples dans leurs principes et cependant très performantes. La base de ces méthodes est un ensemble de propriétés qui découlent de la forme de l'équation ci-dessus et qui sont résumées par les correspondances :
Système
e1(t) s1 (t)
Système e2(t) s2 (t)
Système α1.e1(t - θ) + α2.e2(t - θ) α1.s1(t - θ) + α2.s2(t - θ)
Autrement dit : les mêmes causes produisent toujours les mêmes effets, les effets sont en proportion des causes et les causes ajoutent leurs effets . Remarques :
- Notons qu’à l’inverse, lorsqu’un système présentera ces propriétés, on pourra admettre que ses grandeurs d’entrée / sortie sont liées par une équation différentielle linéaire à coefficients constants. En effet, seuls des opérateurs mathématiques comme l’intégration ou la dérivation vérifient la propriété d’additivité (la dérivée d’une somme est égale à la somme des dérivées).
- Lors de la réalisation des calculs basés sur une décomposition du signal d'entrée, chacune des réponses individuelles devra être déterminée indépendamment des autres en considérant des conditions initiales nulles. Si les conditions initiales ne sont pas nulles à l'instant où le signal somme des entrées est appliqué au système, il faudra ajouter à la somme des réponses, le signal de sortie qui serait déterminé par ces conditions initiales en l'absence de signal d'entrée.
- La plupart des systèmes réels sont non linéaires ou ne peuvent être considérés linéaires que dans le cas où les valeurs du signal d'entrée restent faibles. L'importance que l'on va accorder à l'étude des systèmes linéaires ne devra pas faire oublier cette réalité.
⇓
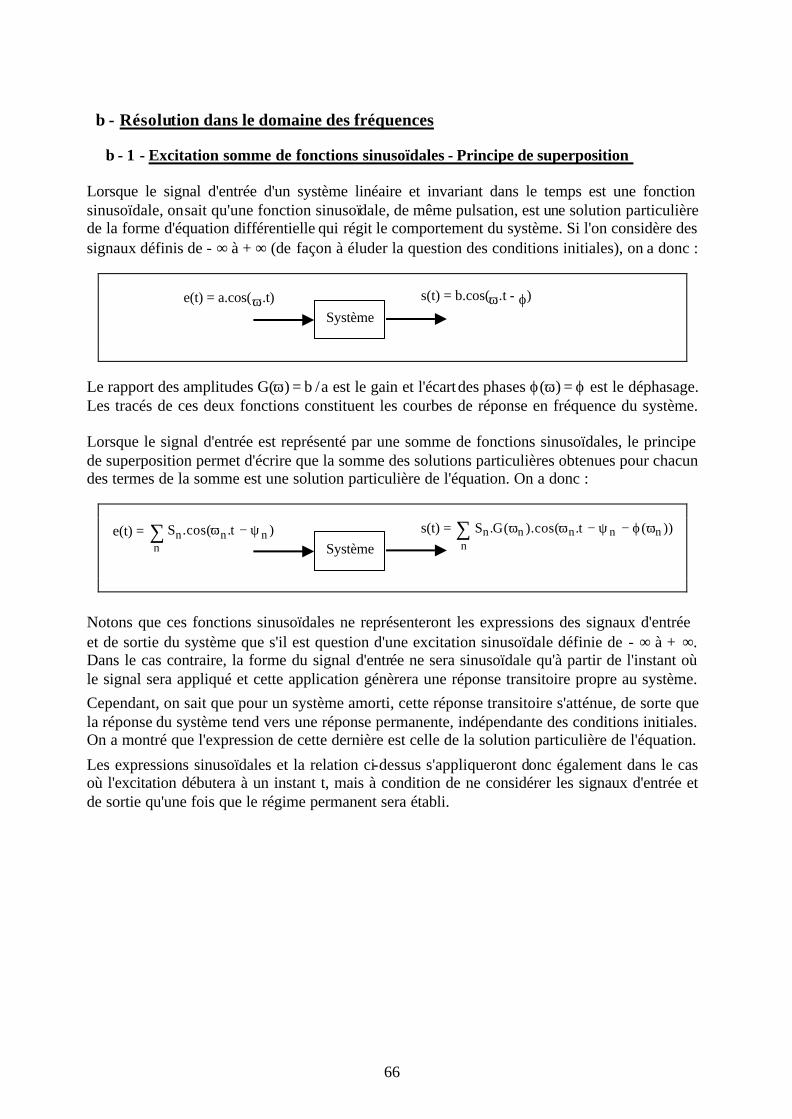
66
b - Résolution dans le domaine des fréquences b - 1 - Excitation somme de fonctions sinusoïdales - Principe de superposition Lorsque le signal d'entrée d'un système linéaire et invariant dans le temps est une fonction sinusoïdale, on sait qu'une fonction sinusoïdale, de même pulsation, est une solution particulière de la forme d'équation différentielle qui régit le comportement du système. Si l'on considère des signaux définis de - ∞ à + ∞ (de façon à éluder la question des conditions initiales), on a donc :
Système e(t) = a.cos(ω.t) s(t) = b.cos(ω.t - ϕ)
Le rapport des amplitudes G(ω) = b / a est le gain et l'écart des phases ϕ(ω) = ϕ est le déphasage. Les tracés de ces deux fonctions constituent les courbes de réponse en fréquence du système. Lorsque le signal d'entrée est représenté par une somme de fonctions sinusoïdales, le principe de superposition permet d'écrire que la somme des solutions particulières obtenues pour chacun des termes de la somme est une solution particulière de l'équation. On a donc :
Système e(t) = ∑ ψ−ω
nnnn )t.cos(.S s(t) = ∑ ωϕ−ψ−ωω
nnnnnn ))(t.cos().(G.S
Notons que ces fonctions sinusoïdales ne représenteront les expressions des signaux d'entrée et de sortie du système que s'il est question d'une excitation sinusoïdale définie de - ∞ à + ∞. Dans le cas contraire, la forme du signal d'entrée ne sera sinusoïdale qu'à partir de l'instant où le signal sera appliqué et cette application génèrera une réponse transitoire propre au système.
Cependant, on sait que pour un système amorti, cette réponse transitoire s'atténue, de sorte que la réponse du système tend vers une réponse permanente, indépendante des conditions initiales. On a montré que l'expression de cette dernière est celle de la solution particulière de l'équation.
Les expressions sinusoïdales et la relation ci-dessus s'appliqueront donc également dans le cas où l'excitation débutera à un instant t, mais à condition de ne considérer les signaux d'entrée et de sortie qu'une fois que le régime permanent sera établi.

67
b - 2 - Excitation périodique - Décomposition en série de Fourier Le Baron Joseph Fourier (1768 - 1830) a établi qu’une fonction périodique et continue, définie de - ∞ à + ∞, pouvait être décomposée en une somme de fonctions sinusoïdales, de la forme :
∑∑∞+
=
∞+
=ω∆+ω∆+=
1nn
1nno )t..nsin(.b)t..ncos(.aa)t(f avec :
T.2 π
=ω∆
Les valeurs à donner aux coefficients de cette série se déduisent des variations de la fonction f(t) sur une période T, en calculant analytiquement les intégrales :
∫=To dt).t(f.
T1
a td).t..ncos().t(f.T2
aTn ∫ ω∆= ∫ ω∆=
Tn dt).t..nsin().t(f.T2
b
ou numériquement, en prenant un pas d'échantillonnage Te suffisamment petit, les sommes :
∑=T
eeo T).T.k(f.T1a ∑ ω∆=
Teeen T).T.k..ncos().T.k(f.
T2a ∑ ω∆=
Teeen T).T.k..nsin().T.k(f.
T2b
Nous ne démontrerons pas ces résultats. Notons que les expressions sous la forme d'intégrales peuvent être vérifiées en remplaçant la fonction f(t) par sa décomposition en série de Fourier. Les coefficients an et bn apparaissent alors comme les résultats d'une somme d'intégrations de produits de deux fonctions sinusoïdales. De toutes ces intégrales, une seule subsiste dans chaque somme : l’intégrale du cos
2(n.∆ω.t) ou du sin 2(n.∆ω.t). Toutes les autres se ramènent, à l’aide
de transformations trigonométriques, à des intégrales de fonctions sinusoïdales sur un nombre entier de périodes. Elles sont donc nulles. On isole ainsi, un par un, les termes de la série.
On regroupe ensuite les termes an.cos(n.∆ω.t) et bn.sin(n.∆ω.t) en posant pour chaque n :
2n
2nn baS += et ( )nnn abArctg=ψ
Finalement, on écrit la fonction f(t) sous la forme d’une somme d’un nombre fini ou infini de composantes sinusoïdales de pulsations n.∆ω, d’amplitudes Sn et de phases ψn , auxquelles s’ajoute une constante éventuelle So = ao qui est égale à la valeur moyenne de la fonction :
∑∞+
=ψ−ω∆+=
1nnno )t..ncos(.SS)t(f
Remarques :
- La composante de pulsation ∆ω = 2.π / T est appelée la composante fondamentale du signal. Les composantes de pulsations multiples de cette pulsation de base en sont les harmoniques. L'écart des pulsations de deux harmoniques successives est : (n + 1).∆ω - n.∆ω = ∆ω.
L'écart de leurs fréquences est : ∆ν = ∆ω / 2.π = 1 / T. On retiendra donc que les fréquences des harmoniques d'un signal périodique sont espacées d'un pas égal à l'inverse de sa période.
- Dans le langage usuel, le terme "fréquence" est plus souvent employé que le terme "pulsation", c'est pourquoi nous exprimerons désormais les pulsations n.∆ω sous la forme 2.π .n.∆ν.
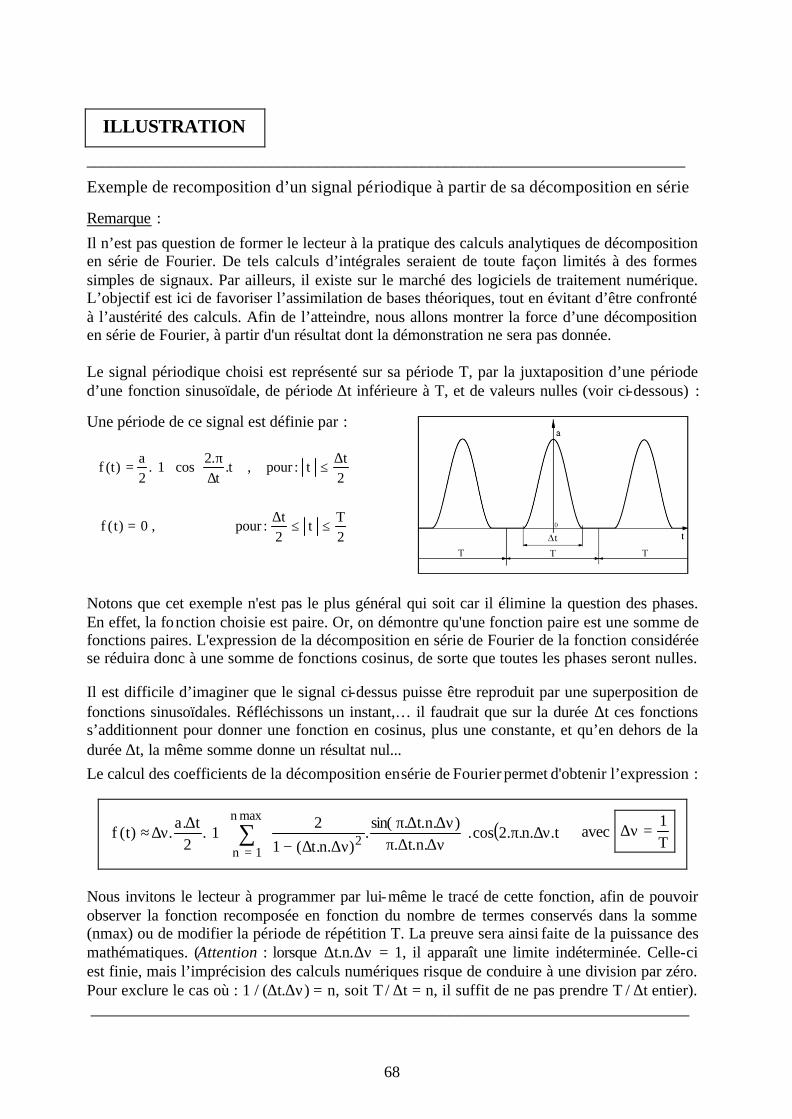
68
ILLUSTRATION
___________________________________________________________________________
Exemple de recomposition d’un signal périodique à partir de sa décomposition en série
Remarque :
Il n’est pas question de former le lecteur à la pratique des calculs analytiques de décomposition en série de Fourier. De tels calculs d’intégrales seraient de toute façon limités à des formes simples de signaux. Par ailleurs, il existe sur le marché des logiciels de traitement numérique. L’objectif est ici de favoriser l’assimilation de bases théoriques, tout en évitant d’être confronté à l’austérité des calculs. Afin de l’atteindre, nous allons montrer la force d’une décomposition en série de Fourier, à partir d'un résultat dont la démonstration ne sera pas donnée. Le signal périodique choisi est représenté sur sa période T, par la juxtaposition d’une période d’une fonction sinusoïdale, de période ∆t inférieure à T, et de valeurs nulles (voir ci-dessous) :
Une période de ce signal est définie par :
≤≤∆
=
∆≤
∆π
+=
2T
t2t
:pour,0)t(f
2t
t:pour,t.t
.2cos1.
2a
)t(f
Notons que cet exemple n'est pas le plus général qui soit car il élimine la question des phases. En effet, la fonction choisie est paire. Or, on démontre qu'une fonction paire est une somme de fonctions paires. L'expression de la décomposition en série de Fourier de la fonction considérée se réduira donc à une somme de fonctions cosinus, de sorte que toutes les phases seront nulles. Il est difficile d’imaginer que le signal ci-dessus puisse être reproduit par une superposition de fonctions sinusoïdales. Réfléchissons un instant,… il faudrait que sur la durée ∆t ces fonctions s’additionnent pour donner une fonction en cosinus, plus une constante, et qu’en dehors de la durée ∆t, la même somme donne un résultat nul...
Le calcul des coefficients de la décomposition en série de Fourier permet d'obtenir l’expression :
( )
ν∆π
ν∆∆πν∆∆π
ν∆∆−+
∆ν∆≈ ∑
=
maxn
1n2 t..n..2cos.
.n.t.).n.t.sin(
.).n.t(1
21.
2t.a
.)t(f avec T1
=ν∆
Nous invitons le lecteur à programmer par lui-même le tracé de cette fonction, afin de pouvoir observer la fonction recomposée en fonction du nombre de termes conservés dans la somme (nmax) ou de modifier la période de répétition T. La preuve sera ainsi faite de la puissance des mathématiques. (Attention : lorsque ∆t.n.∆ν = 1, il apparaît une limite indéterminée. Celle-ci est finie, mais l’imprécision des calculs numériques risque de conduire à une division par zéro. Pour exclure le cas où : 1 / (∆t.∆ν) = n, soit T / ∆t = n, il suffit de ne pas prendre T / ∆t entier). ___________________________________________________________________________
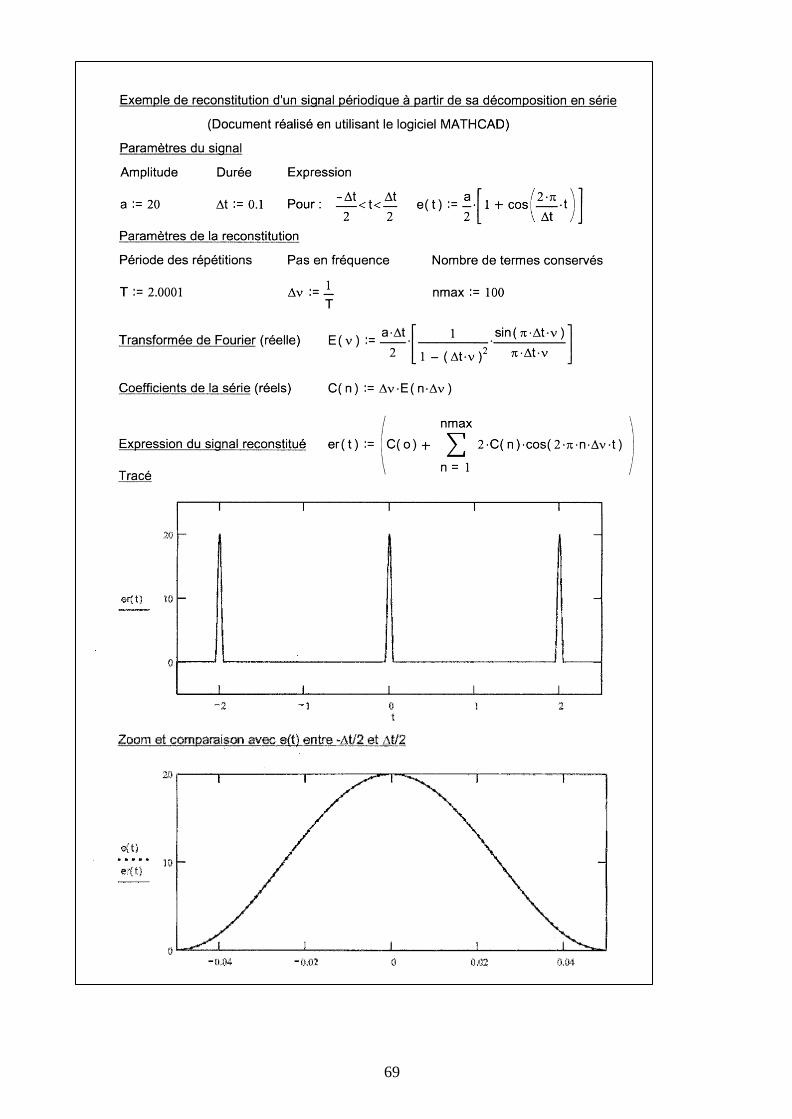
69

70
APPLICATION
___________________________________________________________________________
Expression de la relation entrée / sortie du système dans le cas d'une excitation périodique La décomposition en série de Fourier permet d'étendre à des signaux d'excitations périodiques la méthode de calcul de la réponse d'un système à une excitation somme de fonctions sinusoïdales. Considérons un régime permanent caractérisé par des signaux d'entrée et de sortie périodiques. Notons respectivement Sne, ψne et Sns, ψns , les amplitudes et phases des harmoniques du signal d'entrée et du signal de sortie. Ces harmoniques sont de fréquences νn = n.∆ν, avec : ∆ν = 1 / T. Par définitions du gain et du déphasage :
∀n, ).n(G.SS nens ν∆= et ).n(nens ν∆ϕ+ψ=ψ .
La notation complexe permet de condenser ces deux relations en une relation unique :
[ ] [ ]).n(.jne
.jns nens e.).n(G.Se.S ν∆ϕ+ψ−ψ− ν∆=
⇒ [ ]).n(.j.jne
.jns e)..n(G.e.Se.S nens ν∆ϕ−ψ−ψ− ν∆=
La fonction )(.je).(G νϕ−ν est appelée le gain complexe du système. Remarque :
L'intérêt de la notation complexe est qu'elle permet d'effectuer des calculs, de développer des théories et de raisonner au moyen d'expressions regroupant les termes d'amplitudes et de phases. L'inconvénient de cette notation est qu'elle exige du lecteur une certaine capacité d'abstraction. Mais à ce stade de l'exposé, son utilisation est indispensable.
Pour condenser encore l'écriture de la relation entrée / sortie , on pose :
∀n ≠ 0, 2
e.SC
n.jn
n
ψ−=
2b.ja nn −
= .
L'expression des coefficients complexes Cn est déduite de celles des coefficients an et bn :
∫ ν∆π=Tn dt.)t..n..2cos().t(f.
T2
a , ∫ ν∆π=Tn dt.)t..n..2sin().t(f.
T2
b
⇒ [ ]∫ ν∆π−ν∆π=Tn dt.)t..n..2sin(.j)t..n..2cos().t(f.
T1
C ∫ ν∆π−=T
t..n..2.j dt.e).t(f.T1
.
Notons que pour n = 0, cette dernière expression donne : ∫=To dt).t(f.
T1
C , soit : oo SC = .
Ce résultat justifie que l'on utilise une même expression des coefficients Cn pour n = 0 et n ≠ 0. Mais en conséquence, on retiendra que pour n = 0 : oo CS = , alors que pour n ≠ 0 : nn C.2S = .
∀n, ).n(F.Cn ν∆ν∆= avec ∫ νπ−=νT
t...2.j dt.e).t(f)(F Au final, on écrira : :

71
Remarque :
L’introduction de la notation complexe conduit à exprimer la décomposition en série de Fourier d'une fonction périodique sous la forme :
∑∞+
∞−=
ν∆π=n
t..n..2.jn e.C)t(f
___________________________________________________________________________
Démonstration :
Lorsqu'on exprime chacun des termes de la décomposition sous la forme d'une somme de deux exponentielles complexes conjuguées, on obtient :
∑∞+
=ψ−ν∆π+=
1nnno )t..n..2cos(.SS)t(f
∑∞+
=
ψ−ν∆π−ψ−ν∆π
++=1n
)t..n..2.(j)t..n..2.(j
no 2ee.SS
nn
∑∑∞+
=
ν∆π−Ψ∞+
=
ν∆πΨ−
+
+=
1n
t..n..2.j.j
n
1n
t..n..2.j.j
no e.
2e.S
e.2
e.SS
nn
Or : n
.jn C
2e.S n
=Ψ−
et nTt..n..2.jnn
.jn Cdt.e).t(f.
T1
2b.ja
2e.S n
−ν∆π
Ψ==
+= ∫
D'où : ∑∑∑∞+
∞−=
ν∆π∞+
=
ν∆π−−
∞+
=
ν∆π =++=n
t..n..2.jn
1n
t..n..2.jn
1n
t..n..2.jno e.Ce.Ce.CC)t(f .
___________________________________________________________________________
En résumé :
Dans le cas où les signaux d'entrée et de sortie d'un système sont des signaux périodiques, le signal de sortie peut être déterminé en fonction du signal d'entrée grâce aux opérations suivantes :
Connaissant l'expression mathématique du signal d'entrée e(t), on calcule :
∀n, ).n(E.Cne ν∆ν∆= avec : T/1=ν∆ et ∫ νπ−=νT
t...2.j dt.e).t(e)(E .
On utilise la relation entrée / sortie du système :
∀n, ).n(.jnens e)..n(G.CC ν∆ϕ−ν∆=
Enfin, on exprime le signal de sortie :
∑∞+
=ψ−ν∆π+=
1nnsnsos )t..n..2cos(.SS)t(s avec : osos CS = , nsns C.2S = , )C(Arg nsns =ψ .
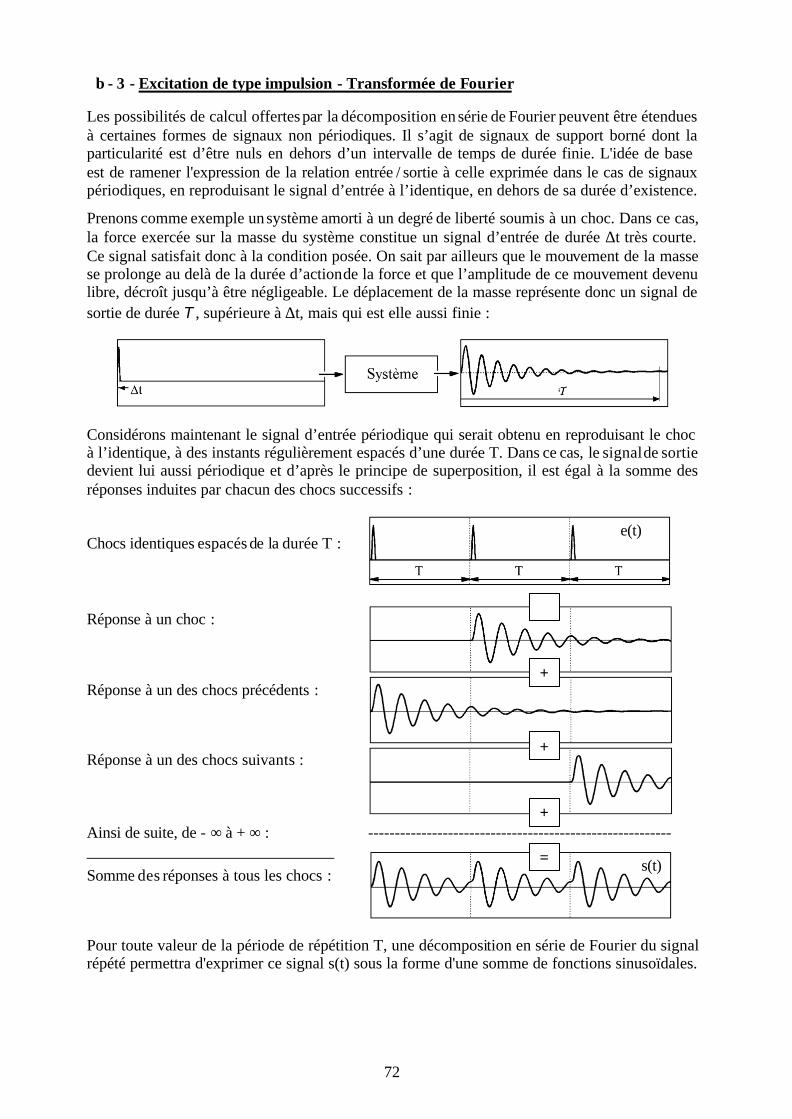
72
b - 3 - Excitation de type impulsion - Transformée de Fourier Les possibilités de calcul offertes par la décomposition en série de Fourier peuvent être étendues à certaines formes de signaux non périodiques. Il s’agit de signaux de support borné dont la particularité est d’être nuls en dehors d’un intervalle de temps de durée finie. L'idée de base est de ramener l'expression de la relation entrée / sortie à celle exprimée dans le cas de signaux périodiques, en reproduisant le signal d’entrée à l’identique, en dehors de sa durée d’existence.
Prenons comme exemple un système amorti à un degré de liberté soumis à un choc. Dans ce cas, la force exercée sur la masse du système constitue un signal d’entrée de durée ∆t très courte. Ce signal satisfait donc à la condition posée. On sait par ailleurs que le mouvement de la masse se prolonge au delà de la durée d’action de la force et que l’amplitude de ce mouvement devenu libre, décroît jusqu’à être négligeable. Le déplacement de la masse représente donc un signal de sortie de durée T , supérieure à ∆t, mais qui est elle aussi finie :
Considérons maintenant le signal d’entrée périodique qui serait obtenu en reproduisant le choc à l’identique, à des instants régulièrement espacés d’une durée T. Dans ce cas, le signal de sortie devient lui aussi périodique et d’après le principe de superposition, il est égal à la somme des réponses induites par chacun des chocs successifs :
Chocs identiques espacés de la durée T : Réponse à un choc : Réponse à un des chocs précédents : Réponse à un des chocs suivants : Ainsi de suite, de - ∞ à + ∞ : _______________________________
Somme des réponses à tous les chocs :
---------------------------------------------------------
Pour toute valeur de la période de répétition T, une décomposition en série de Fourier du signal répété permettra d'exprimer ce signal s(t) sous la forme d'une somme de fonctions sinusoïdales.
e(t)
s(t)
+
+
+
=
⇓
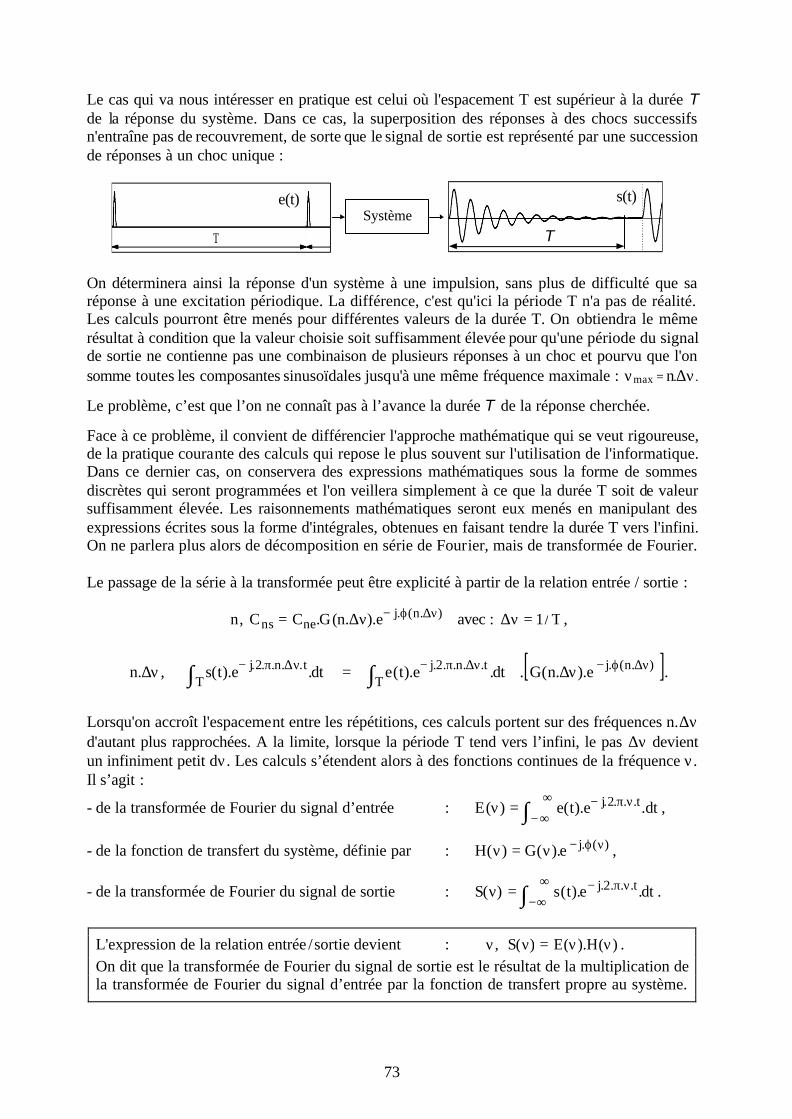
73
Le cas qui va nous intéresser en pratique est celui où l'espacement T est supérieur à la durée T de la réponse du système. Dans ce cas, la superposition des réponses à des chocs successifs n'entraîne pas de recouvrement, de sorte que le signal de sortie est représenté par une succession de réponses à un choc unique :
On déterminera ainsi la réponse d'un système à une impulsion, sans plus de difficulté que sa réponse à une excitation périodique. La différence, c'est qu'ici la période T n'a pas de réalité. Les calculs pourront être menés pour différentes valeurs de la durée T. On obtiendra le même résultat à condition que la valeur choisie soit suffisamment élevée pour qu'une période du signal de sortie ne contienne pas une combinaison de plusieurs réponses à un choc et pourvu que l'on somme toutes les composantes sinusoïdales jusqu'à une même fréquence maximale : νmax = n.∆ν.
Le problème, c’est que l’on ne connaît pas à l’avance la durée T de la réponse cherchée.
Face à ce problème, il convient de différencier l'approche mathématique qui se veut rigoureuse, de la pratique courante des calculs qui repose le plus souvent sur l'utilisation de l'informatique. Dans ce dernier cas, on conservera des expressions mathématiques sous la forme de sommes discrètes qui seront programmées et l'on veillera simplement à ce que la durée T soit de valeur suffisamment élevée. Les raisonnements mathématiques seront eux menés en manipulant des expressions écrites sous la forme d'intégrales, obtenues en faisant tendre la durée T vers l'infini. On ne parlera plus alors de décomposition en série de Fourier, mais de transformée de Fourier. Le passage de la série à la transformée peut être explicité à partir de la relation entrée / sortie :
).n(.jnens e)..n(G.CC,n ν∆ϕ−ν∆=∀ avec : T/1=ν∆ ,
⇒ [ ]).n(.jT
t..n..2.jT
t..n..2.j e)..n(G.dt.e).t(edt.e).t(s,.n ν∆ϕ−ν∆π−ν∆π− ν∆
=
ν∆∀ ∫∫ .
Lorsqu'on accroît l'espacement entre les répétitions, ces calculs portent sur des fréquences n.∆ν d'autant plus rapprochées. A la limite, lorsque la période T tend vers l’infini, le pas ∆ν devient un infiniment petit dν. Les calculs s’étendent alors à des fonctions continues de la fréquence ν. Il s’agit :
- de la transformée de Fourier du signal d’entrée : ∫∞+
∞−νπ−=ν dt.e).t(e)(E t...2.j ,
- de la fonction de transfert du système, définie par : )(.je).(G)(H νϕ−ν=ν ,
- de la transformée de Fourier du signal de sortie : ∫∞+
∞−νπ−=ν dt.e).t(s)(S t...2.j .
L'expression de la relation entrée / sortie devient : )(H).(E)(S, νν=νν∀ . On dit que la transformée de Fourier du signal de sortie est le résultat de la multiplication de la transformée de Fourier du signal d’entrée par la fonction de transfert propre au système.
Système e(t) s(t)
T

74
APPLICATION
___________________________________________________________________________
Interprétation dans le domaine des fréquences de la réponse à une impulsion
Considérons une fonction continue, nulle en dehors d’un intervalle de temps de durée ∆t et qui atteint sur cet intervalle une valeur a. Ce type de signal correspond à une impulsion appliquée à l'entrée d'un système. Il représente par exemple, la force exercée lorsqu’on frappe une structure au moyen d'un marteau de choc.
La modélisation la plus sommaire de ce type de signal est une fonction Porte, de durée ∆t et d’amplitude a, définie par :
a.∏∆t(t) = a, pour 2/tt ∆≤ ,
a.∏∆t(t) = 0, pour 2/tt ∆≥ .
Par définition, la transformée de Fourier de cette fonction est : ∫∞+
∞−νπ−
∆∏=ν dt.e).t(a.)(E t...2.jt
[ ]
−νπ
=νπ−
==ν∆νπ−∆νπ∆+
∆−νπ−∆+
∆−νπ−∫ j.2
ee.
.a
e...2.j
adt.ea.)(E
t...jt...j2/t2/t
t...2.j2/t
2/tt...2.j
ν∆πν∆π
∆=ν.t.
).t.sin().t.a()(E
Cette expression est celle d'une fonction sinus cardinal. Cette fonction est nulle pour toutes les fréquences ν multiples de 1 / ∆t. Sa valeur à l'origine est égale à a.∆t. Ce produit correspond à l'aire de la surface délimitée par le graphe de e(t) et l'axe t. Notons que ce dernier résultat se généralise, puisque quelle que soit la forme du signal e(t), on a par définition : ∫∆
=t
dt).t(e)0(E .
Le graphe du module de cette transformée de Fourier est donné ci-dessous :
soit :
⇒
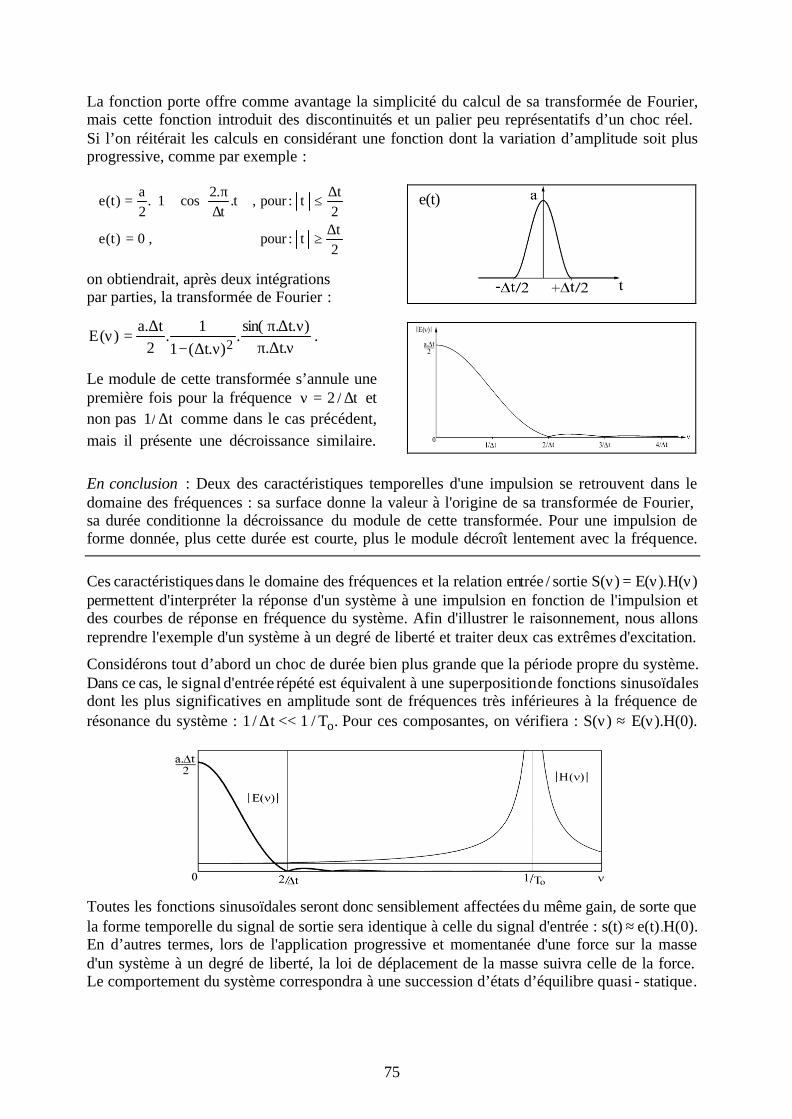
75
La fonction porte offre comme avantage la simplicité du calcul de sa transformée de Fourier, mais cette fonction introduit des discontinuités et un palier peu représentatifs d’un choc réel. Si l’on réitérait les calculs en considérant une fonction dont la variation d’amplitude soit plus progressive, comme par exemple :
∆≥=
∆≤
∆π
+=
2t
t:pour,0)t(e
2t
t:pour,t.t
.2cos1.
2a
)t(e
on obtiendrait, après deux intégrations par parties, la transformée de Fourier :
ν∆πν∆π
ν∆−∆
=ν.t.
).t.sin(.
).t(11
.2
t.a)(E 2 .
Le module de cette transformée s’annule une première fois pour la fréquence t/2 ∆=ν et non pas t/1 ∆ comme dans le cas précédent, mais il présente une décroissance similaire.
En conclusion : Deux des caractéristiques temporelles d'une impulsion se retrouvent dans le domaine des fréquences : sa surface donne la valeur à l'origine de sa transformée de Fourier, sa durée conditionne la décroissance du module de cette transformée. Pour une impulsion de forme donnée, plus cette durée est courte, plus le module décroît lentement avec la fréquence.
Ces caractéristiques dans le domaine des fréquences et la relation entrée / sortie S(ν) = E(ν).H(ν) permettent d'interpréter la réponse d'un système à une impulsion en fonction de l'impulsion et des courbes de réponse en fréquence du système. Afin d'illustrer le raisonnement, nous allons reprendre l'exemple d'un système à un degré de liberté et traiter deux cas extrêmes d'excitation.
Considérons tout d’abord un choc de durée bien plus grande que la période propre du système. Dans ce cas, le signal d'entrée répété est équivalent à une superposition de fonctions sinusoïdales dont les plus significatives en amplitude sont de fréquences très inférieures à la fréquence de résonance du système : 1 / ∆t << 1 / To. Pour ces composantes, on vérifiera : S(ν) ≈ E(ν).H(0).
Toutes les fonctions sinusoïdales seront donc sensiblement affectées du même gain, de sorte que la forme temporelle du signal de sortie sera identique à celle du signal d'entrée : s(t) ≈ e(t).H(0). En d’autres termes, lors de l'application progressive et momentanée d'une force sur la masse d'un système à un degré de liberté, la loi de déplacement de la masse suivra celle de la force. Le comportement du système correspondra à une succession d’états d’équilibre quasi - statique.
e(t)
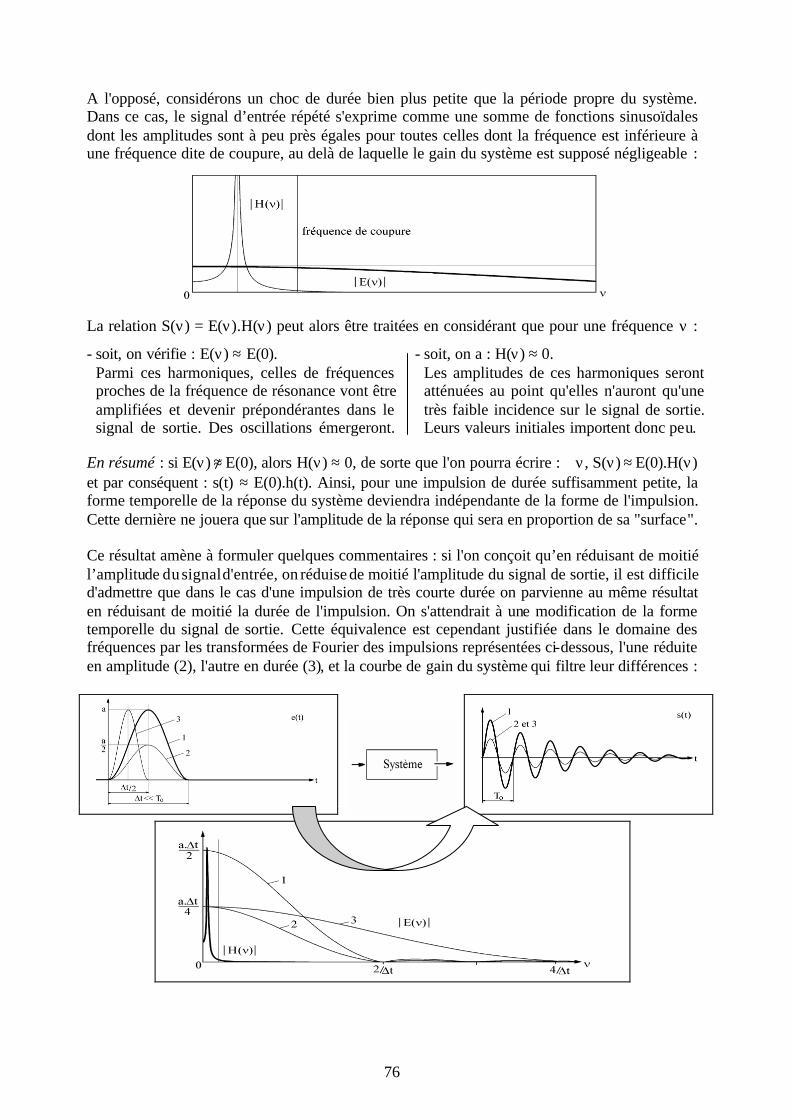
76
A l'opposé, considérons un choc de durée bien plus petite que la période propre du système. Dans ce cas, le signal d’entrée répété s'exprime comme une somme de fonctions sinusoïdales dont les amplitudes sont à peu près égales pour toutes celles dont la fréquence est inférieure à une fréquence dite de coupure, au delà de laquelle le gain du système est supposé négligeable :
La relation S(ν) = E(ν).H(ν) peut alors être traitées en considérant que pour une fréquence ν :
- soit, on vérifie : E(ν) ≈ E(0). Parmi ces harmoniques, celles de fréquences
proches de la fréquence de résonance vont être amplifiées et devenir prépondérantes dans le signal de sortie. Des oscillations émergeront.
- soit, on a : H(ν) ≈ 0. Les amplitudes de ces harmoniques seront
atténuées au point qu'elles n'auront qu'une très faible incidence sur le signal de sortie. Leurs valeurs initiales importent donc peu.
En résumé : si E(ν) ≈ E(0), alors H(ν) ≈ 0, de sorte que l'on pourra écrire : ∀ν, S(ν) ≈ E(0).H(ν) et par conséquent : s(t) ≈ E(0).h(t). Ainsi, pour une impulsion de durée suffisamment petite, la forme temporelle de la réponse du système deviendra indépendante de la forme de l'impulsion. Cette dernière ne jouera que sur l'amplitude de la réponse qui sera en proportion de sa "surface". Ce résultat amène à formuler quelques commentaires : si l'on conçoit qu’en réduisant de moitié l’amplitude du signal d'entrée, on réduise de moitié l'amplitude du signal de sortie, il est difficile d'admettre que dans le cas d'une impulsion de très courte durée on parvienne au même résultat en réduisant de moitié la durée de l'impulsion. On s'attendrait à une modification de la forme temporelle du signal de sortie. Cette équivalence est cependant justifiée dans le domaine des fréquences par les transformées de Fourier des impulsions représentées ci-dessous, l'une réduite en amplitude (2), l'autre en durée (3), et la courbe de gain du système qui filtre leur différences :
77
Un autre élément de compréhension, plus concret, est apporté par l’expérience. On imagine bien que la forme du mouvement faisant suite à l’application d’un choc bref s’identifie à un mouvement libre amorti. La loi de ce mouvement est déterminée par les paramètres de masse, de raideur et d'amortissement du système, ainsi que par ses conditions initiales. Ces dernières sont les conditions existant à l'instant où la force cesse d'agir. Mais si l'on fait tendre la durée d'action de la force vers zéro, dès lors que cette durée devient imperceptible à l’échelle de la période propre du système, le mouvement de la masse se réduit en totalité à un mouvement libre. Dans ce cas, l'action de la force ne joue plus que sur l'amplitude des oscillations qui est fonction de l'énergie communiquée au système pendant le choc. Celle-ci pourra être augmentée d'autant, soit que l'on exerce une force plus intense, soit que l'on exerce la même force plus longtemps.
Nous démontrerons ce résultat dans le paragraphe de définition de la "réponse impulsionnelle". Pour l'instant, on retiendra que dans le cas d’une impulsion e(t), de forme quelconque mais de très courte durée, l'amplitude de la réponse du système est proportionnelle à l'intégrale : ∫ dt).t(e .
Remarque :
D'après ce qui vient d'être exposé, si l'on imagine que la masse d'un système à un degré de liberté est soumise à une force de grande amplitude, mais de très courte durée d'action, alors la réponse du système se limitera à un très petit déplacement de la masse. Autrement dit, la masse d'un système masse - ressort pourra être soumise à une force excessivement grande sans pour autant que le ressort soit fortement comprimé. Ce résultat montre à nouveau l'importance des inerties et de la prise en compte du facteur temps lorsqu'on étudie les effets d'une force sur une structure. Nous développerons cet aspect du problème dans un paragraphe intitulé "Spectres de choc".
ILLUSTRATION
___________________________________________________________________________
Recomposition de la réponse à une impulsion à partir d’une décomposition en série de Fourier Entre les deux cas limites qui viennent d’être exposés, la forme du signal de sortie évoluera en fonction de la durée du choc. Notamment, l'amplitude des oscillations dépendra de la valeur de la transformée de Fourier du signal d'entrée au voisinage du pic de résonance de la fonction de transfert du système. Pour une force d'amplitude donnée, lorsque la durée du choc sera réduite, l'amplitude des oscillations augmentera tout d'abord en raison de l'étalement en fréquence de la transformée de Fourier du signal d'entrée, puis elle diminuera en raison de la diminution de la valeur de l'intégrale du signal qui accompagne la réduction de sa durée.
Nous invitons le lecteur qui aura pris soin de programmer la décomposition en série de Fourier d’une impulsion périodique, à modifier sa programmation de façon à faire apparaître la réponse d’un système à un degré de liberté. Il lui suffit pour cela d’affecter chacune des harmoniques d'un gain et d'un déphasage calculés à partir des expressions des courbes de réponse du système .
Remarques :
- L'espacement T des répétitions devra être supérieur à la durée de la réponse à une impulsion. Cette dernière peut être évaluée à partir d’un nombre d’oscillations libres amorties fixé a priori.
- Pour une période T choisie, les signaux d’entrée et de sortie seront correctement recomposés à partir de leurs séries de Fourier respectives, dès lors que les nombres de termes conservés dans ces sommes seront tels que : nmax.∆ν = nmax.(1 / T) > étendue en fréquence du signal. Pour un signal de type "impulsion", l'étendue en fréquence est en proportion de l'inverse de sa durée. Pour une réponse oscillatoire, elle dépend de l'inverse de la période propre du système. _________________________________________________________________________________________________________________
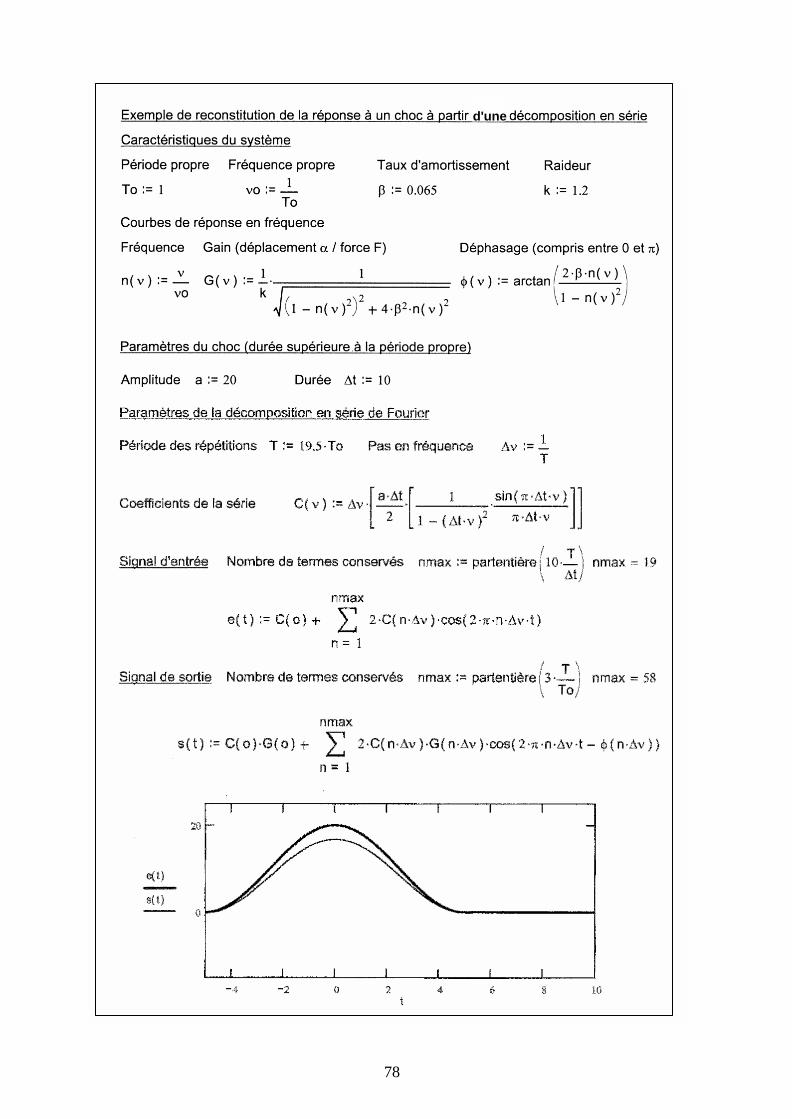
78
d'une
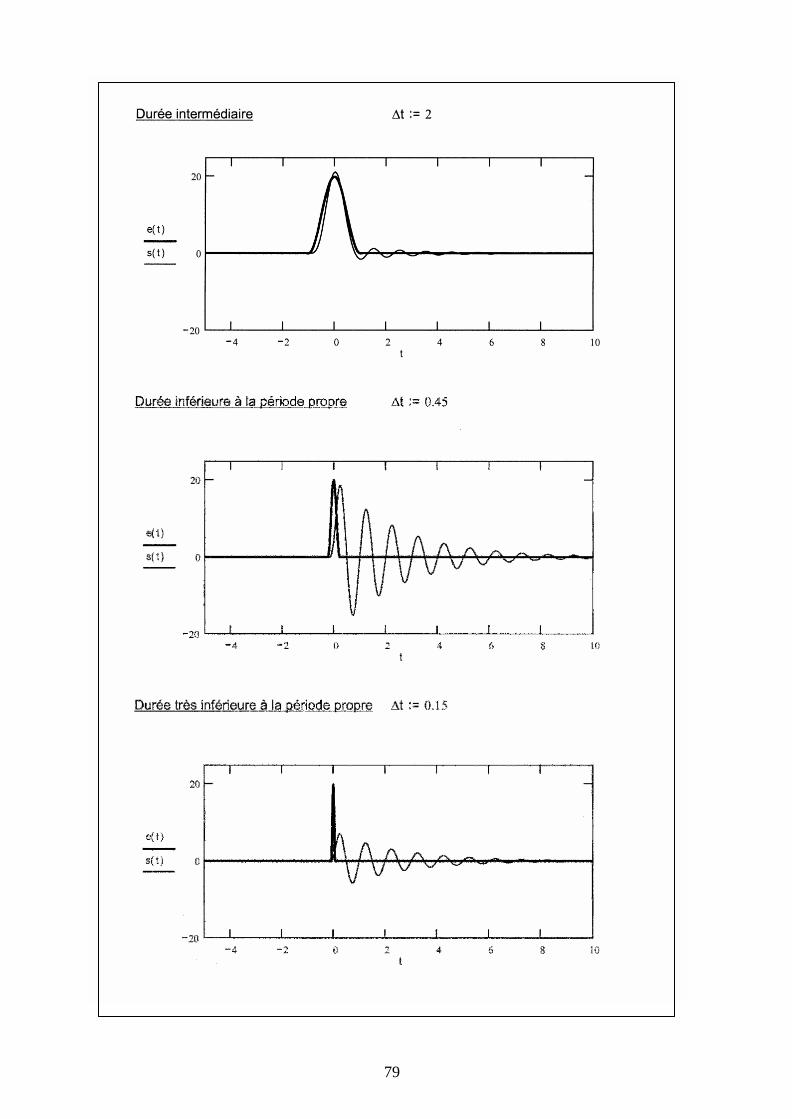
79
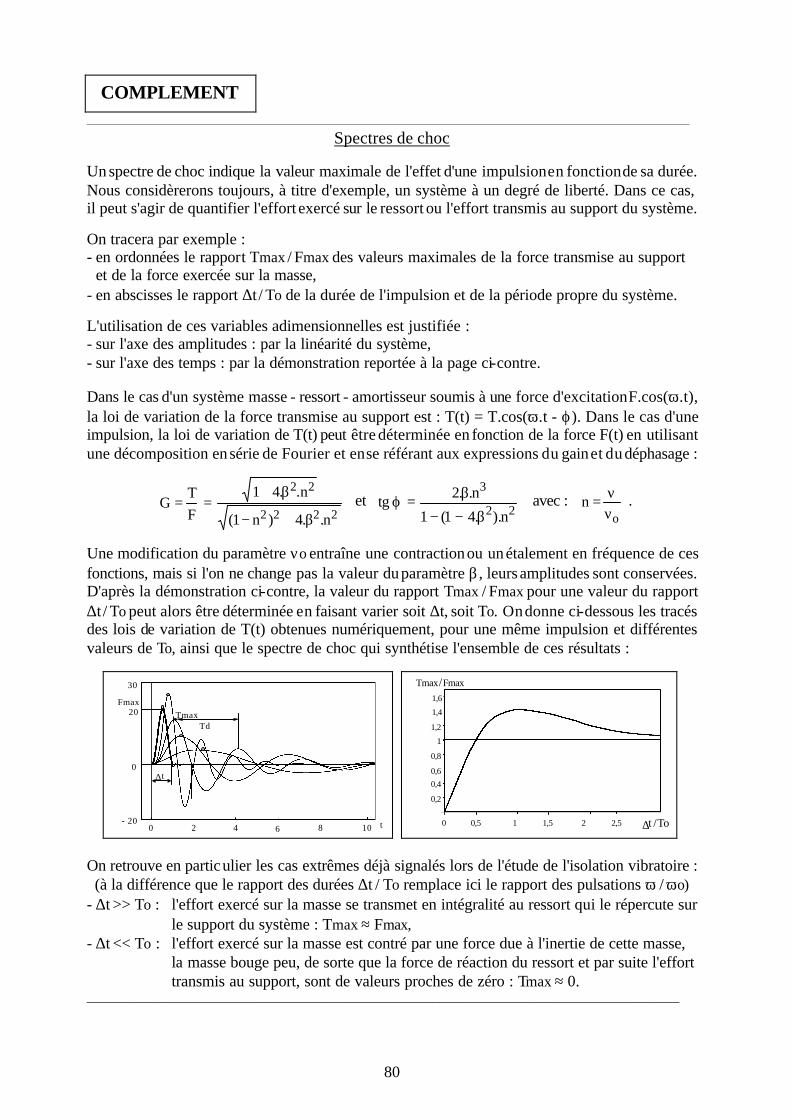
80
COMPLEMENT _______________________________________________________________________________________________________________________________________________________
Spectres de choc Un spectre de choc indique la valeur maximale de l'effet d'une impulsion en fonction de sa durée.
Nous considèrerons toujours, à titre d'exemple, un système à un degré de liberté. Dans ce cas, il peut s'agir de quantifier l'effort exercé sur le ressort ou l'effort transmis au support du système.
On tracera par exemple : - en ordonnées le rapport Tmax / Fmax des valeurs maximales de la force transmise au support et de la force exercée sur la masse, - en abscisses le rapport ∆t / To de la durée de l'impulsion et de la période propre du système.
L'utilisation de ces variables adimensionnelles est justifiée : - sur l'axe des amplitudes : par la linéarité du système, - sur l'axe des temps : par la démonstration reportée à la page ci-contre. Dans le cas d'un système masse - ressort - amortisseur soumis à une force d'excitation F.cos(ω.t), la loi de variation de la force transmise au support est : T(t) = T.cos(ω.t - ϕ). Dans le cas d'une impulsion, la loi de variation de T(t) peut être déterminée en fonction de la force F(t) en utilisant une décomposition en série de Fourier et en se référant aux expressions du gain et du déphasage :
2222
22
n..4)n1(
n..41
FT
Gβ+−
β+== et
22
3
n)..41(1
n..2tgβ−−
β=ϕ avec : o
nνν= .
Une modification du paramètre νo entraîne une contraction ou un étalement en fréquence de ces fonctions, mais si l'on ne change pas la valeur du paramètre β , leurs amplitudes sont conservées. D'après la démonstration ci-contre, la valeur du rapport Tmax / Fmax pour une valeur du rapport ∆t / To peut alors être déterminée en faisant varier soit ∆t, soit To. On donne ci-dessous les tracés des lois de variation de T(t) obtenues numériquement, pour une même impulsion et différentes
valeurs de To, ainsi que le spectre de choc qui synthétise l'ensemble de ces résultats :
0 2 4 6 8 10
0
- 20
30
20 Fmax
Tmax
∆t
Td
t
0
0,2
0,4 0,6
0,8
1
1,2
1,4
Tmax / Fmax
0,5 1 1,5 2 2,5 ∆t / To
1,6
On retrouve en particulier les cas extrêmes déjà signalés lors de l'étude de l'isolation vibratoire : (à la différence que le rapport des durées ∆t / To remplace ici le rapport des pulsations ω / ωo)
- ∆t >> To : l'effort exercé sur la masse se transmet en intégralité au ressort qui le répercute sur le support du système : Tmax ≈ Fmax, - ∆t << To : l'effort exercé sur la masse est contré par une force due à l'inertie de cette masse, la masse bouge peu, de sorte que la force de réaction du ressort et par suite l'effort transmis au support, sont de valeurs proches de zéro : Tmax ≈ 0. ___________________________________________________________________________________________________
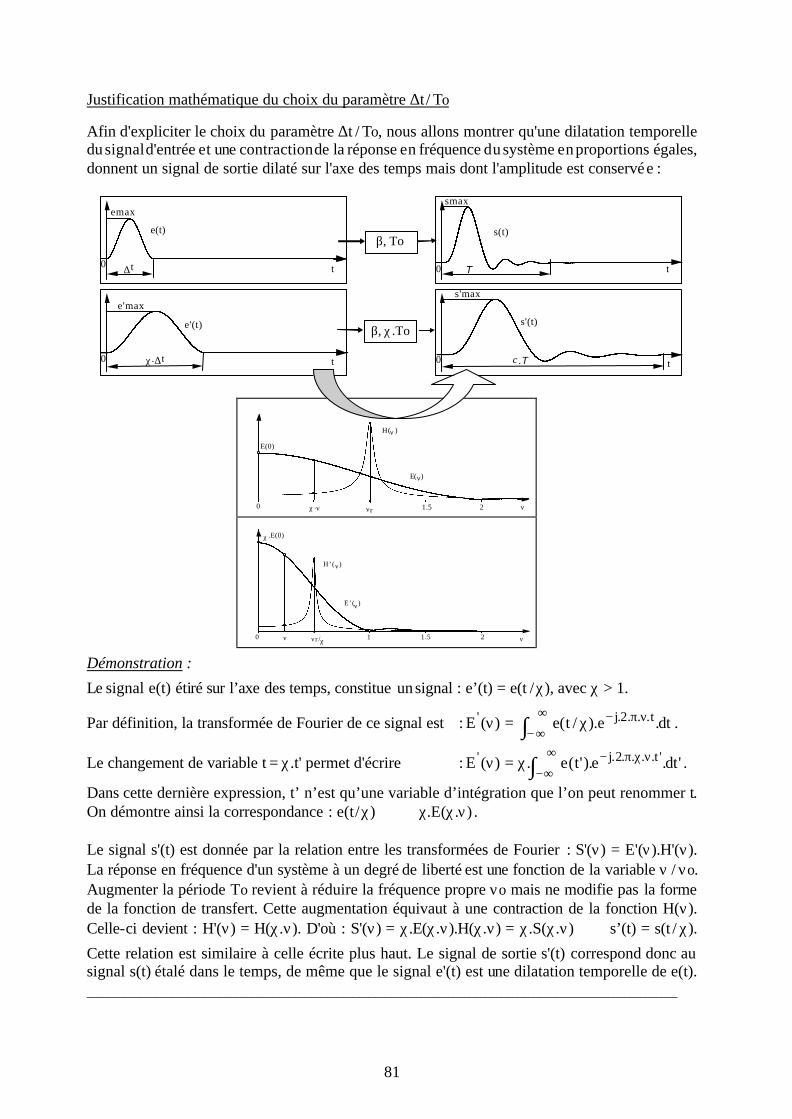
81
Justification mathématique du choix du paramètre ∆t / To
Afin d'expliciter le choix du paramètre ∆t / To, nous allons montrer qu'une dilatation temporelle du signal d'entrée et une contraction de la réponse en fréquence du système en proportions égales, donnent un signal de sortie dilaté sur l'axe des temps mais dont l'amplitude est conservée :
e(t)
t 0 ∆t
emax
s(t)
t 0 T
smax
e'(t)
t 0 χ.∆t
e'max
s'(t)
t 0 χ.T
s'max
E(0)
0 χ .ν 1.5 2 ν
H(ν )
E(ν)
ν r
0 ν 1.5 2 ν
H’(ν)
E’(ν)
ν r /χ 1
χ .E(0)
Démonstration :
Le signal e(t) étiré sur l’axe des temps, constitue un signal : e’(t) = e(t / χ), avec χ > 1.
Par définition, la transformée de Fourier de ce signal est : ∫∞+
∞−νπ−χ=ν dt.e)./t(e)(E t...2.j' .
Le changement de variable t = χ.t' permet d'écrire : ∫∞+
∞−νχπ−χ=ν 'dt.e).'t(e.)(E 't....2.j' .
Dans cette dernière expression, t’ n’est qu’une variable d’intégration que l’on peut renommer t. On démontre ainsi la correspondance : e(t / χ) ⇔ ).(E. νχχ . Le signal s'(t) est donnée par la relation entre les transformées de Fourier : S'(ν) = E'(ν).H'(ν). La réponse en fréquence d'un système à un degré de liberté est une fonction de la variable ν / νo. Augmenter la période To revient à réduire la fréquence propre νo mais ne modifie pas la forme de la fonction de transfert. Cette augmentation équivaut à une contraction de la fonction H(ν). Celle-ci devient : H'(ν) = H(χ.ν). D'où : S'(ν) = χ.E(χ.ν).H(χ.ν) = χ.S(χ.ν) ⇔ s’(t) = s(t / χ).
Cette relation est similaire à celle écrite plus haut. Le signal de sortie s'(t) correspond donc au signal s(t) étalé dans le temps, de même que le signal e'(t) est une dilatation temporelle de e(t).
_______________________________________________________________________________________________________________
β, To
β, χ.To

82
b - 4 - Excitation de type échelon - Transformée de Laplace La transformée de Fourier est une fonction de la fréquence définie par l'intégrale :
∫∞+
∞−νπ−=ν dt.e).t(f)(F t...2.j
Pour que cette fonction existe, il faut que l'intégrale soit convergente.
Lorsqu'un signal appliqué à l'entrée d'un système ne reprend pas une valeur de repos nulle après un certain temps (cas d’un échelon) ou lorsque le signal de sortie croît indéfiniment (cas d’un système instable), il n’est pas possible d’imaginer ces signaux reproduits à l’identique. De fait, on énonce en Mathématiques que de tels signaux n’admettent pas de transformée de Fourier. On démontre cependant que certains problèmes de convergence peuvent être contournés en adoptant une transformée quelque peu différente. Il s’agit de la transformée de Laplace, qui est définie par l'intégrale :
∫∞+ −=
0t.p dt.e).t(f)p(F .
Notons :
- que le domaine d’application de cette transformée est limité aux fonctions nulles avant un instant t qui est pris comme origine des temps, - que la variable p n’est pas un imaginaire pur mais un nombre complexe p = δ + j.2.π .ν dont la partie réelle est appelée abscisse de convergence. La réponse d’un système est alors déterminée grâce à la relation : S(p) = E(p).H(p), qui est analogue à la relation : )(H).(E)(S νν=ν . On accède ainsi à la solution d’une équation différentielle en effectuant un simple produit. Les passages du domaine temporel au domaine fréquentiel, puis inversement, sont quant à eux facilités par l’utilisation de tables de transformées de Laplace des fonctions les plus courantes.
Notons que pour les fonctions dont les transformées de Fourier existent, il suffit de remplacer p par j.2.π .ν pour convertir les expressions de leurs transformées de Laplace en celles de Fourier.
Remarque :
La transformée de Laplace est plus utilisée par les automaticiens qui étudient les performances et les conditions de stabilité des systèmes asservis, que par les mécaniciens qui sont en général confrontés à des systèmes stables par nature, soumis à des chocs ou des vibrations périodiques. Dans le domaine de la mécanique vibratoire, la transformée de Fourier constituera donc un outil suffisant pour résoudre la plupart des problèmes.
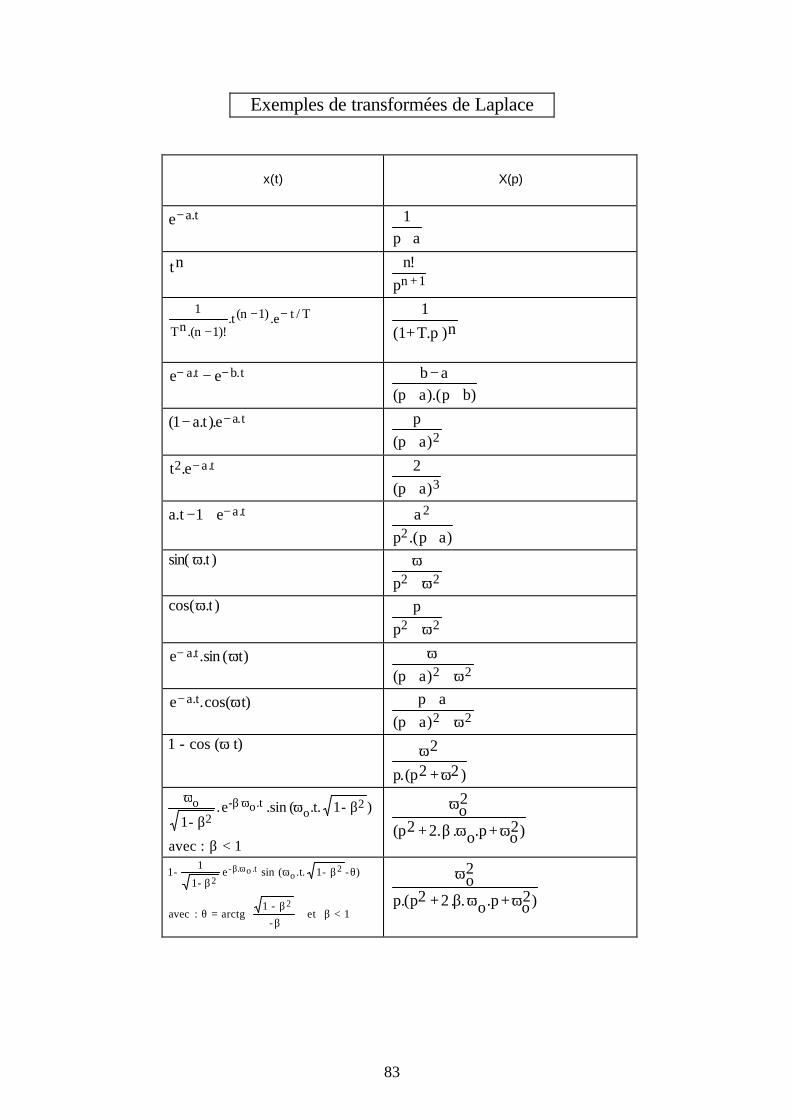
83
Exemples de transformées de Laplace
x(t)
X(p)
t.ae− ap
1+
nt 1+np
n!
T/t.e1)(n.t1)!.(nnT
1 −−−
n) T.p+(1
1
t.bt.a ee −− − )bp).(ap(
ab++
−
t.ae.)t.a1( −− 2)ap(
p+
t.a2 e.t − 3)ap(
2+
t.ae1t.a −+− )ap.(p
a2
2
+
)t.sin( ω 22p ω+
ω
)t.cos(ω 22p
pω+
)t(sin.e t.a ω− 22)ap( ω++
ω
)t(cos.e t.a ω− 22)ap(
apω++
+
t)( cos - 1 ω
)2+2p(.p
2
ωω
1:avec
) -1 .t.(.sin e . -1
2o
.to -2
o
<β
βωβ
ω ωβ
)2o+.po. 2.+2p(
2o
ωωβ
ω
1et -
- 1 arctg=:avec
)- -1 .t.(sin e -1
1 -1
2
2o
.to.-2
<β
ββ
θ
θβωβ
ωβ
)2o+.po .. 2+2p(p.
2o
ωωβ
ω
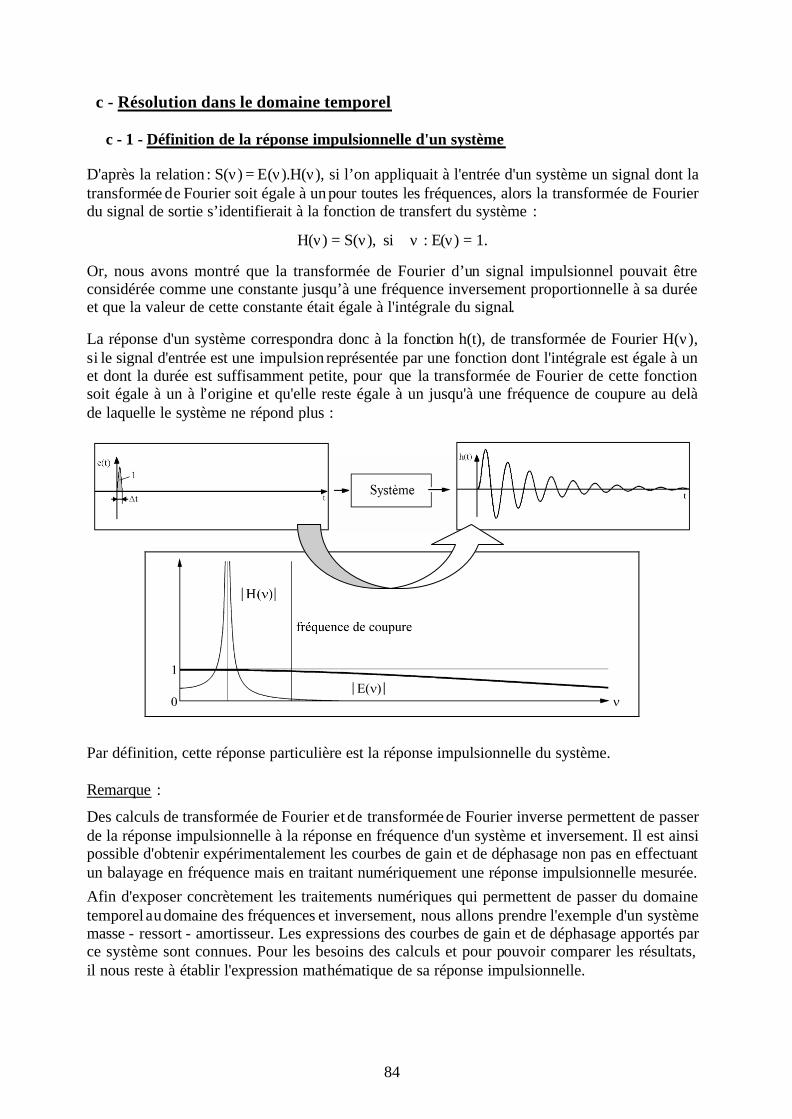
84
c - Résolution dans le domaine temporel c - 1 - Définition de la réponse impulsionnelle d'un système D'après la relation : S(ν) = E(ν).H(ν), si l’on appliquait à l'entrée d'un système un signal dont la transformée de Fourier soit égale à un pour toutes les fréquences, alors la transformée de Fourier du signal de sortie s’identifierait à la fonction de transfert du système :
H(ν) = S(ν), si ∀ν : E(ν) = 1.
Or, nous avons montré que la transformée de Fourier d’un signal impulsionnel pouvait être considérée comme une constante jusqu’à une fréquence inversement proportionnelle à sa durée et que la valeur de cette constante était égale à l'intégrale du signal.
La réponse d'un système correspondra donc à la fonction h(t), de transformée de Fourier H(ν), si le signal d'entrée est une impulsion représentée par une fonction dont l'intégrale est égale à un et dont la durée est suffisamment petite, pour que la transformée de Fourier de cette fonction soit égale à un à l’origine et qu'elle reste égale à un jusqu'à une fréquence de coupure au delà de laquelle le système ne répond plus :
Par définition, cette réponse particulière est la réponse impulsionnelle du système. Remarque :
Des calculs de transformée de Fourier et de transformée de Fourier inverse permettent de passer de la réponse impulsionnelle à la réponse en fréquence d'un système et inversement. Il est ainsi possible d'obtenir expérimentalement les courbes de gain et de déphasage non pas en effectuant un balayage en fréquence mais en traitant numériquement une réponse impulsionnelle mesurée.
Afin d'exposer concrètement les traitements numériques qui permettent de passer du domaine temporel au domaine des fréquences et inversement, nous allons prendre l'exemple d'un système masse - ressort - amortisseur. Les expressions des courbes de gain et de déphasage apportés par ce système sont connues. Pour les besoins des calculs et pour pouvoir comparer les résultats, il nous reste à établir l'expression mathématique de sa réponse impulsionnelle.

85
c - 2 - Expression de la réponse impulsionnelle d'un système masse - ressort - amortisseur L’expression de la réponse impulsionnelle d’un système à un degré de liberté peut être obtenue grâce à la théorie des percussions. Cette théorie permet de démontrer que l’effet d’une impulsion équivaut à une vitesse initiale communiquée à la masse du système sur une durée suffisamment courte pour que cette masse n'est pas eu le temps de se déplacer. La démonstration nécessite une intégration de l'équation du mouvement sur la durée ∆t de l'impulsion et un passage à la limite.
De la relation : ∫ ∫ ∫∫ ∆ ∆ ∆∆=++
t t ttdt).t(Fdt.x.kdt'.x.h2dt".x.m
on déduit : [ ] [ ] ∫∫ ∆∆
=+−∆+−∆tt
dt).t(Fdt.x.k)0(x)t(x.h2)0('x)t('x.m .
Le système étant au repos avant que l'impulsion soit appliquée : x(0) = 0 et x'(0) = 0.
Il reste donc : ∫∫ ∆∆=+∆+∆
ttdt).t(Fdt.x.k)t(x.h2)t('x.m .
Dans cette équation, les termes en x sont d'un ordre inférieur au terme en x'. En effet, lorsque la durée ∆t tend vers zéro, pour une même valeur finale de la vitesse x'(∆t), le déplacement x(∆t) étant inférieur à x'(∆t).∆t, tend vers zéro. Si l'on augmente dans le même temps l’amplitude de la force F(t) de façon à conserver la valeur de son intégrale, on obtient alors pour un ∆t très petit :
∫∆≈∆
tdt).t(F)t('x.m .
A l'instant ∆t, le mouvement forcé devient un mouvement libre. Mais comme la durée ∆t tend vers t = 0, on confond ces deux instants et l'ensemble du mouvement avec un mouvement libre. On en conclue que la réponse impulsionnelle d’un système masse - ressort - amortisseur est un mouvement libre de la forme :
( ))t.(sin.B)t.(cos.A.ex ddt.o. ω+ω= ωβ− où 2
od 1. β−ω=ω ,
avec comme conditions initiales : x(0) ≈ 0 et ∫∆=
tdt).t(F.
m1
)0('x .
On en tire : A = 0, ∫∆=ω
td dt).t(F.m1
.B , d'où : ( )t.o.d
d
t e).t.sin(..m
dt).t(F)t(x ωβ−∆ ω
ω=
∫.
Notons que l'on retrouve par ce raisonnement que l'amplitude de la réponse à une impulsion de très courte durée est proportionnelle à l'intégrale du signal d'entrée. Comme par définition la réponse impulsionnelle correspond à une intégrale de valeur égale à un. Son expression est donc :
t.o.d
de).t.sin(.
.m1
)t(h ωβ−ωω
=
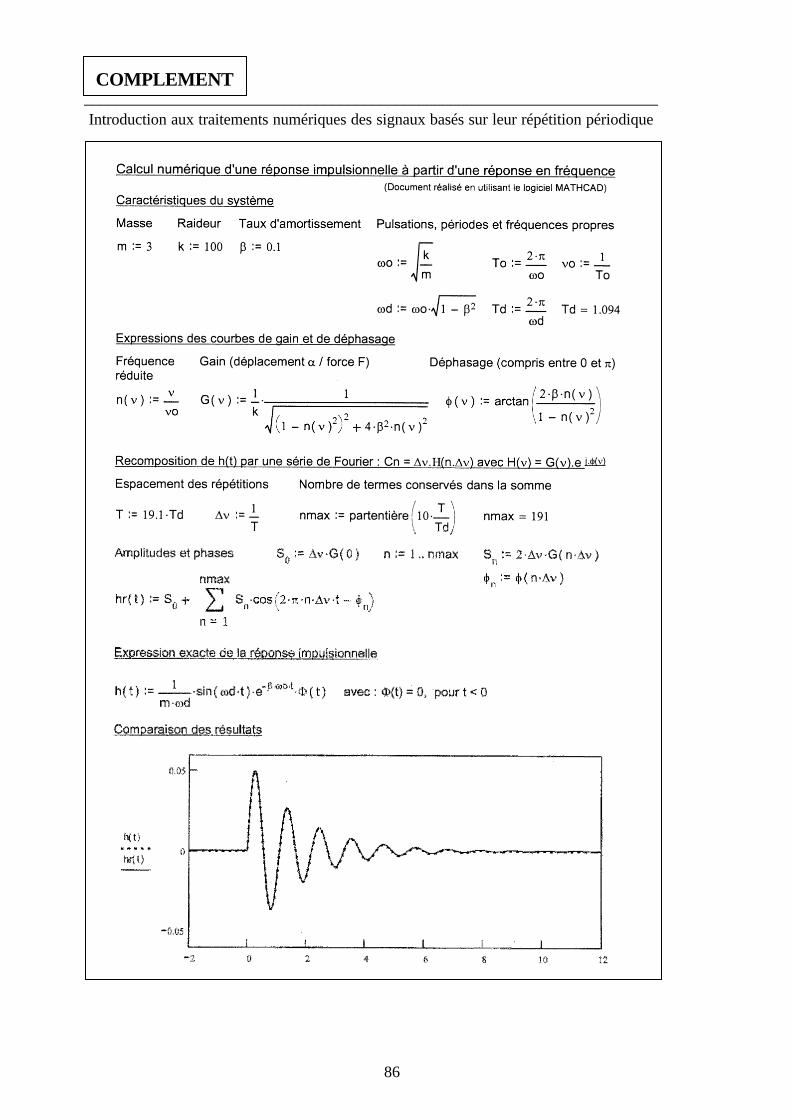
86
COMPLEMENT ________________________________________________________________________ Introduction aux traitements numériques des signaux basés sur leur répétition périodique
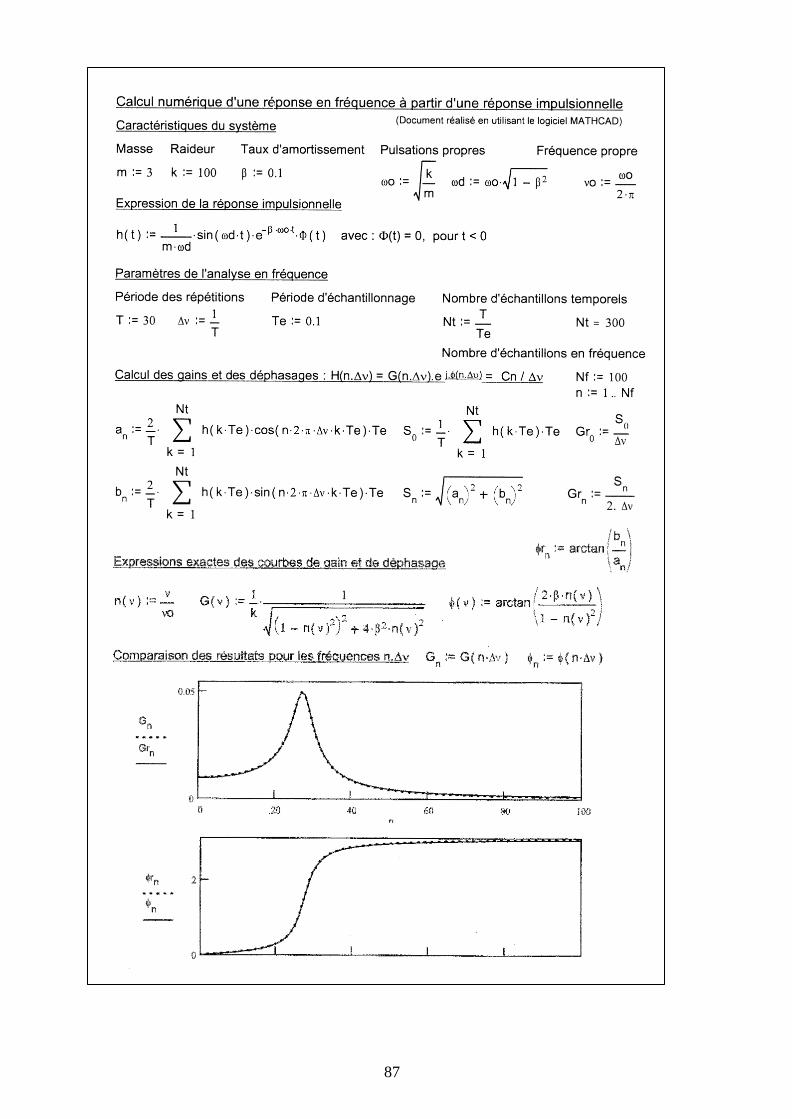
87
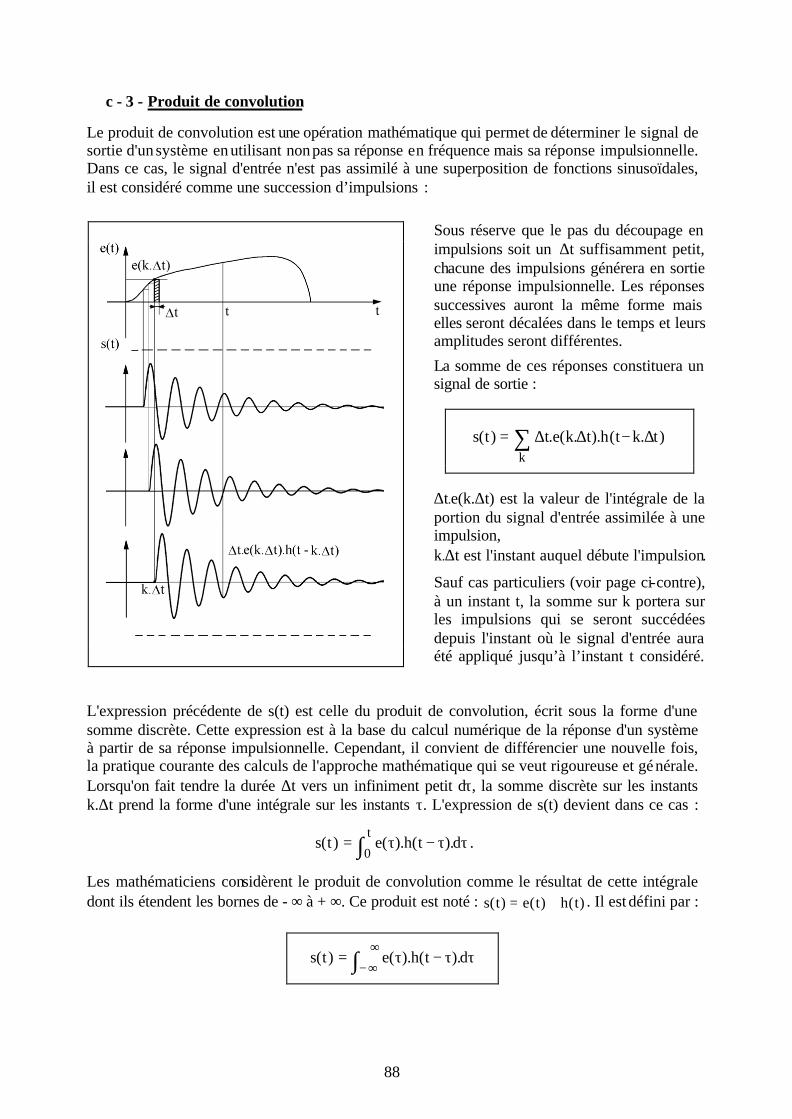
88
c - 3 - Produit de convolution
Le produit de convolution est une opération mathématique qui permet de déterminer le signal de sortie d'un système en utilisant non pas sa réponse en fréquence mais sa réponse impulsionnelle. Dans ce cas, le signal d'entrée n'est pas assimilé à une superposition de fonctions sinusoïdales, il est considéré comme une succession d’impulsions :
Sous réserve que le pas du découpage en impulsions soit un ∆t suffisamment petit, chacune des impulsions générera en sortie une réponse impulsionnelle. Les réponses successives auront la même forme mais elles seront décalées dans le temps et leurs amplitudes seront différentes.
La somme de ces réponses constituera un signal de sortie :
∑ ∆−∆∆=k
)t.kt(h).t.k(e.t)t(s
∆t.e(k.∆t) est la valeur de l'intégrale de la portion du signal d'entrée assimilée à une impulsion, k.∆t est l'instant auquel débute l'impulsion.
Sauf cas particuliers (voir page ci-contre), à un instant t, la somme sur k portera sur les impulsions qui se seront succédées depuis l'instant où le signal d'entrée aura été appliqué jusqu’à l’instant t considéré.
L'expression précédente de s(t) est celle du produit de convolution, écrit sous la forme d'une somme discrète. Cette expression est à la base du calcul numérique de la réponse d'un système à partir de sa réponse impulsionnelle. Cependant, il convient de différencier une nouvelle fois, la pratique courante des calculs de l'approche mathématique qui se veut rigoureuse et générale. Lorsqu'on fait tendre la durée ∆t vers un infiniment petit dτ, la somme discrète sur les instants k.∆t prend la forme d'une intégrale sur les instants τ. L'expression de s(t) devient dans ce cas :
∫ ττ−τ=t
0d).t(h).(e)t(s .
Les mathématiciens considèrent le produit de convolution comme le résultat de cette intégrale dont ils étendent les bornes de - ∞ à + ∞. Ce produit est noté : )t(h)t(e)t(s ⊗= . Il est défini par :
∫∞+
∞−ττ−τ= d).t(h).(e)t(s
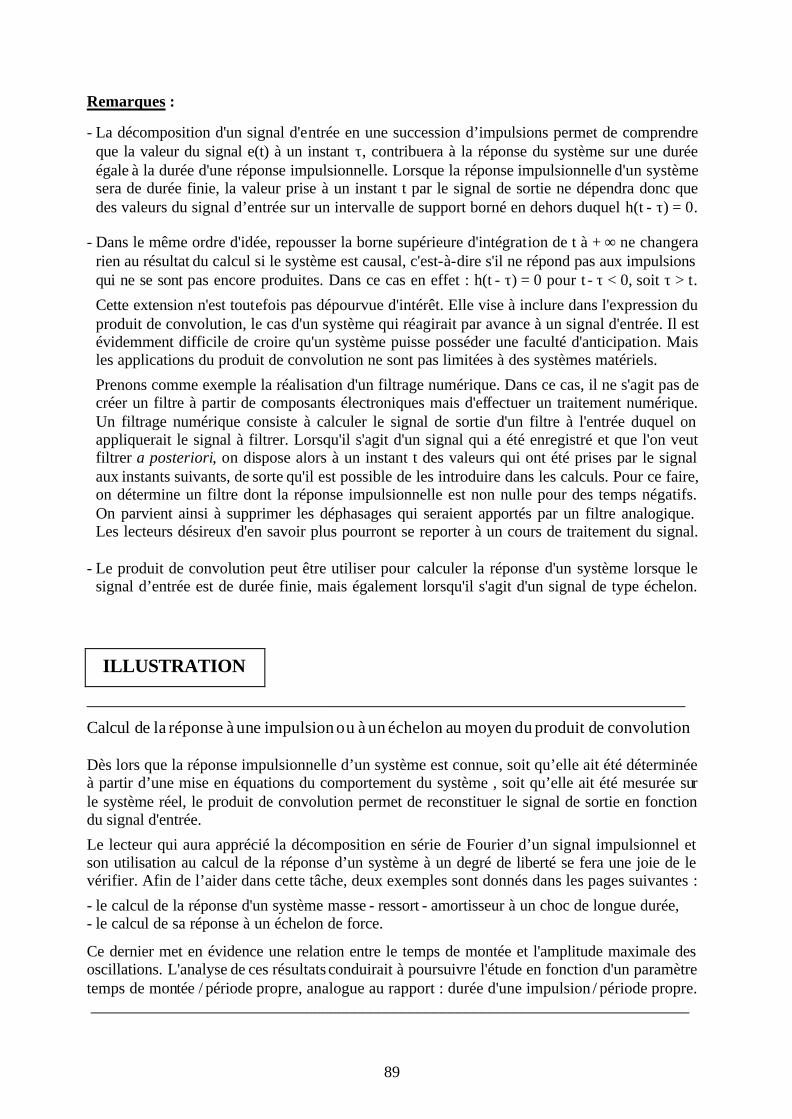
89
Remarques :
- La décomposition d'un signal d'entrée en une succession d’impulsions permet de comprendre que la valeur du signal e(t) à un instant τ, contribuera à la réponse du système sur une durée égale à la durée d'une réponse impulsionnelle. Lorsque la réponse impulsionnelle d'un système sera de durée finie, la valeur prise à un instant t par le signal de sortie ne dépendra donc que des valeurs du signal d’entrée sur un intervalle de support borné en dehors duquel h(t - τ) = 0.
- Dans le même ordre d'idée, repousser la borne supérieure d'intégration de t à + ∞ ne changera rien au résultat du calcul si le système est causal, c'est-à-dire s'il ne répond pas aux impulsions qui ne se sont pas encore produites. Dans ce cas en effet : h(t - τ) = 0 pour t - τ < 0, soit τ > t.
Cette extension n'est toutefois pas dépourvue d'intérêt. Elle vise à inclure dans l'expression du produit de convolution, le cas d'un système qui réagirait par avance à un signal d'entrée. Il est évidemment difficile de croire qu'un système puisse posséder une faculté d'anticipation. Mais les applications du produit de convolution ne sont pas limitées à des systèmes matériels.
Prenons comme exemple la réalisation d'un filtrage numérique. Dans ce cas, il ne s'agit pas de créer un filtre à partir de composants électroniques mais d'effectuer un traitement numérique. Un filtrage numérique consiste à calculer le signal de sortie d'un filtre à l'entrée duquel on appliquerait le signal à filtrer. Lorsqu'il s'agit d'un signal qui a été enregistré et que l'on veut filtrer a posteriori, on dispose alors à un instant t des valeurs qui ont été prises par le signal aux instants suivants, de sorte qu'il est possible de les introduire dans les calculs. Pour ce faire, on détermine un filtre dont la réponse impulsionnelle est non nulle pour des temps négatifs. On parvient ainsi à supprimer les déphasages qui seraient apportés par un filtre analogique. Les lecteurs désireux d'en savoir plus pourront se reporter à un cours de traitement du signal.
- Le produit de convolution peut être utiliser pour calculer la réponse d'un système lorsque le signal d’entrée est de durée finie, mais également lorsqu'il s'agit d'un signal de type échelon.
ILLUSTRATION
___________________________________________________________________________
Calcul de la réponse à une impulsion ou à un échelon au moyen du produit de convolution Dès lors que la réponse impulsionnelle d’un système est connue, soit qu’elle ait été déterminée à partir d’une mise en équations du comportement du système , soit qu’elle ait été mesurée sur le système réel, le produit de convolution permet de reconstituer le signal de sortie en fonction du signal d'entrée.
Le lecteur qui aura apprécié la décomposition en série de Fourier d’un signal impulsionnel et son utilisation au calcul de la réponse d’un système à un degré de liberté se fera une joie de le vérifier. Afin de l’aider dans cette tâche, deux exemples sont donnés dans les pages suivantes :
- le calcul de la réponse d'un système masse - ressort - amortisseur à un choc de longue durée, - le calcul de sa réponse à un échelon de force.
Ce dernier met en évidence une relation entre le temps de montée et l'amplitude maximale des oscillations. L'analyse de ces résultats conduirait à poursuivre l'étude en fonction d'un paramètre temps de montée / période propre, analogue au rapport : durée d'une impulsion / période propre. ___________________________________________________________________________
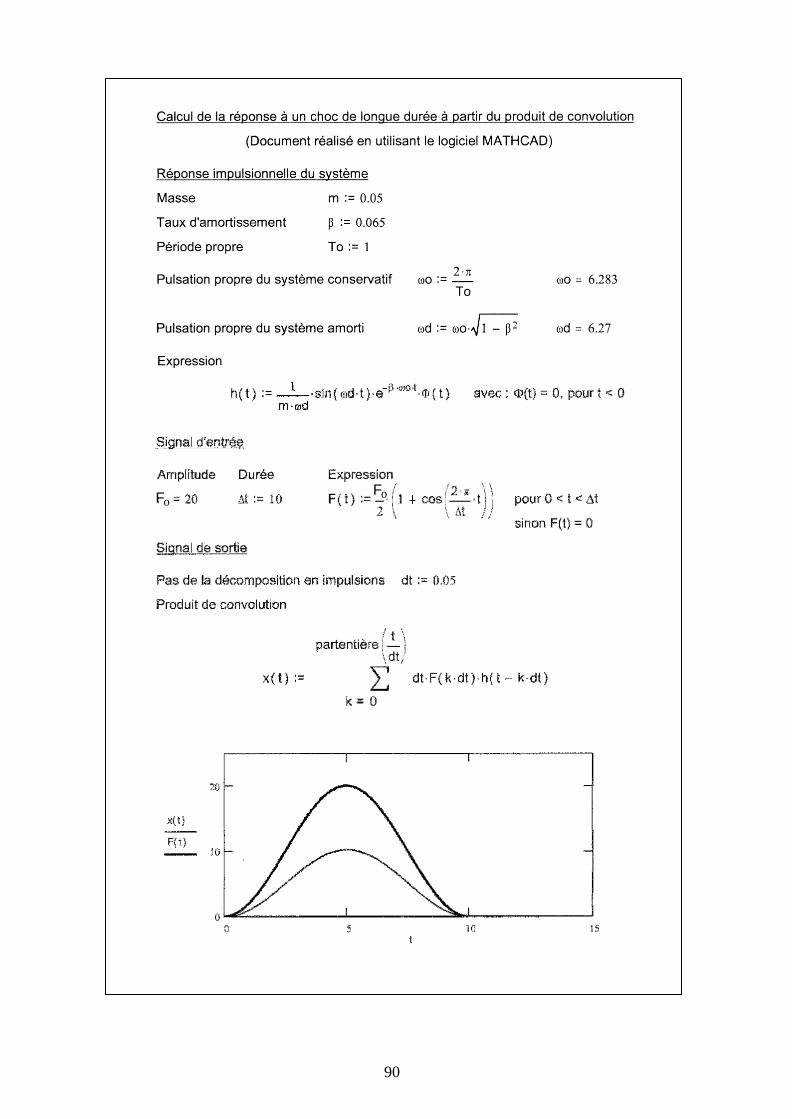
90
oF oF
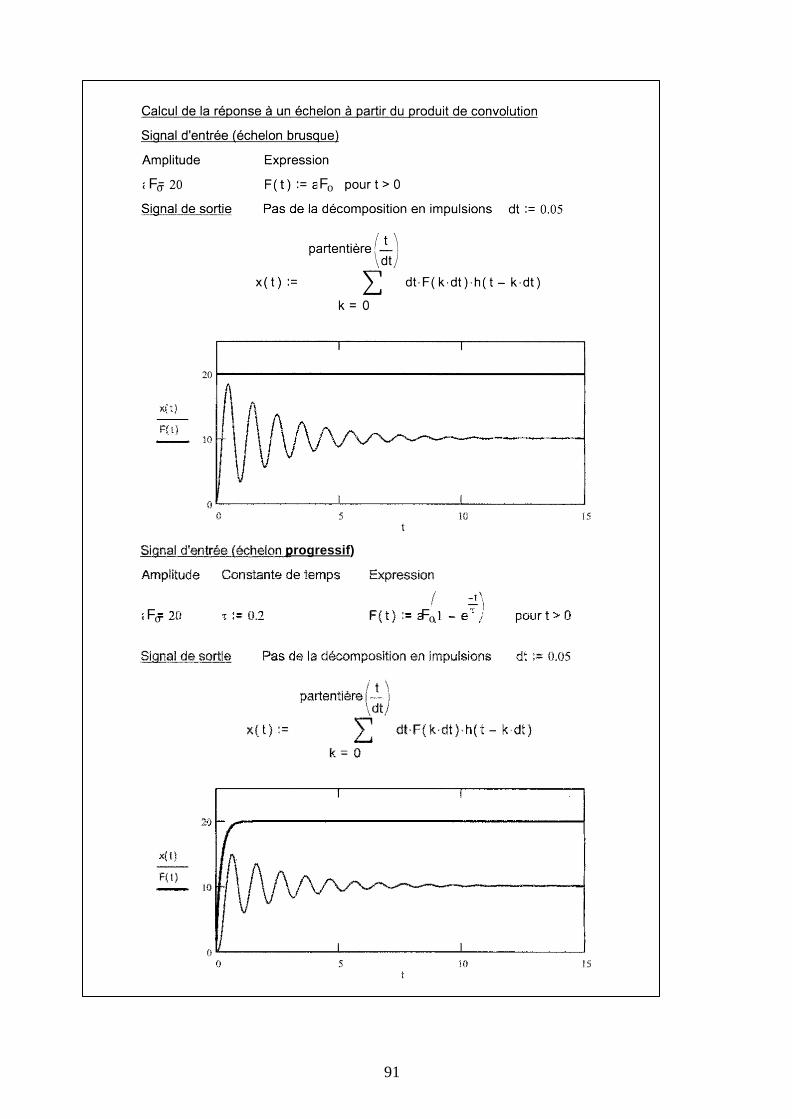
91
progressif)
oF oF
oF oF

92
APPLICATION
___________________________________________________________________________
Calcul de la réponse à un échelon instantané au moyen du produit de convolution
L'étude de la réponse d'un système à un degré de liberté à un échelon révèle que pour une force brusquement appliquée sur la masse, l’amplitude maximale de son déplacement atteint prés du double de la valeur déterminée à l'équilibre statique. Or ce même déplacement correspond à la variation de longueur du ressort. La tenue mécanique du système imposera donc que la force appliquée ne dépasse pas la moitié de celle que le ressort est capable de supporter en statique. Les contraintes créées par une force pourront ainsi se trouver amplifiées lors de son application, par le comportement dynamique du système. L’importance de ce phénomène dépendra du taux d’amortissement et de rapidité de la mise en charge.
On montre ci-dessous que pour un système non amorti soumis à un échelon de force instantané, le facteur d’amplification du déplacement est égal à deux. Ce résultat est obtenu analytiquement en intégrant le produit de convolution :
ττ−ωω
=ττ−τ= τ−ωβ−∫∫ d.e)).t.(sin(..mF
d).t(h).(F)t(x )t.(.t
0 dd
ot
0o
Dans le cas où le taux d'amortissement β est nul, on obtient successivement :
ττ−ωω
= ∫ d)).t.(sin(..mF
)t(xt
0 oo
o
( ) ττωω−τωωω
= ∫ d.).sin().t.cos().cos().t.sin(..mF t
0 ooooo
o
τω
ωω+
τω
ωω
ω=
t
0o
oo
t
0o
oo
o
o ).cos(.1
).t.cos().sin(.1
).t.sin(..mF
( ))t.cos()t.(cos)t.(sin..m
Foo
2o
22o
o ω−ω+ωω
=
et finalement : ( ))t.cos(1.kF
)t(x oo ω−= , dont on déduit : statique
omax x.2
kF
.2x == .
Des calculs similaires peuvent être effectués dans le cas où le système est amorti, mais ils sont plus longs (le calcul de l'intégrale de convolution nécessite alors deux intégrations par parties). Ils deviendraient inextricables si l'on considérait une loi de variation de la force F(t) de façon à traduire par exemple, une augmentation progressive de la force sur un temps de montée donné. C'est la raison pour laquelle la mise en oeuvre du produit de convolution passe le plus souvent par l'utilisation de logiciels de traitement numérique. Dans ce cas, on n'obtient pas l'expression mathématique du signal de sortie, mais ses valeurs successives, ce qui est toutefois suffisant pour révéler l'influence d'un paramètre par la comparaison des résultats de plusieurs simulations Les tracés de la page précédente montrent ainsi qu'une application progressive de la force réduit l'amplitude maximale des oscillations de la masse et par conséquent de la déformation du ressort. ___________________________________________________________________________
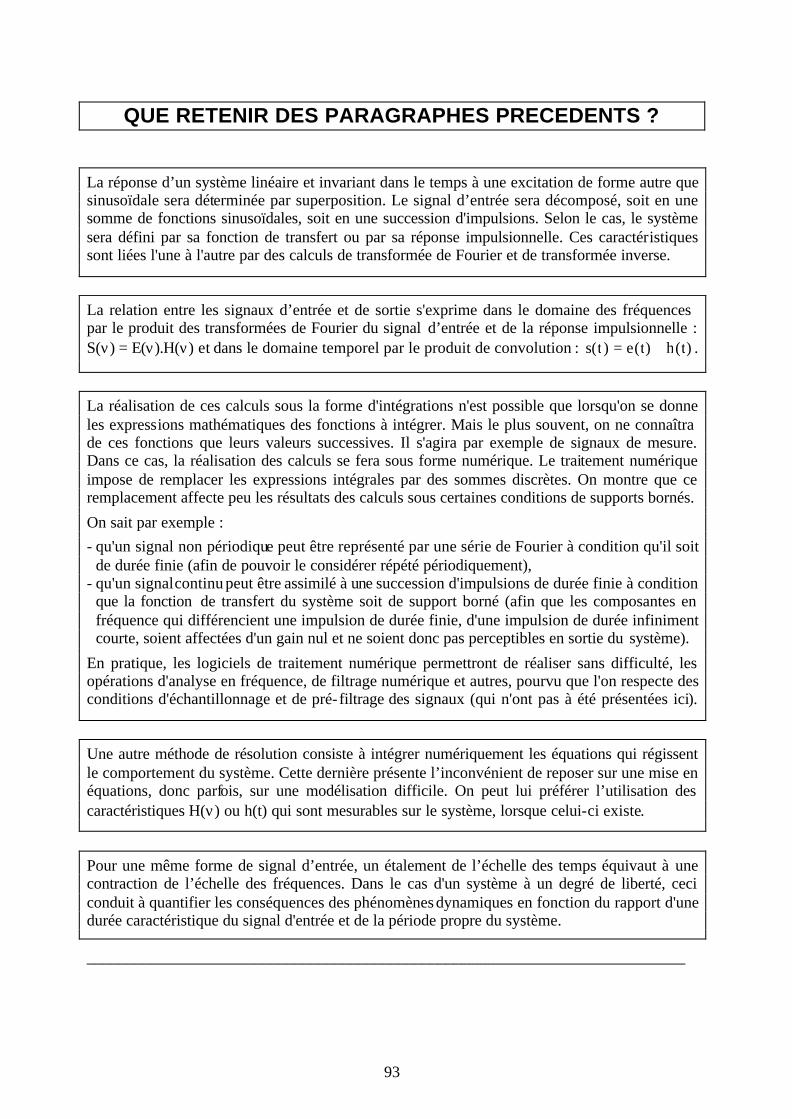
93
QUE RETENIR DES PARAGRAPHES PRECEDENTS ?
La réponse d’un système linéaire et invariant dans le temps à une excitation de forme autre que sinusoïdale sera déterminée par superposition. Le signal d’entrée sera décomposé, soit en une somme de fonctions sinusoïdales, soit en une succession d'impulsions. Selon le cas, le système sera défini par sa fonction de transfert ou par sa réponse impulsionnelle. Ces caractéristiques sont liées l'une à l'autre par des calculs de transformée de Fourier et de transformée inverse.
La relation entre les signaux d’entrée et de sortie s'exprime dans le domaine des fréquences par le produit des transformées de Fourier du signal d’entrée et de la réponse impulsionnelle : S(ν) = E(ν).H(ν) et dans le domaine temporel par le produit de convolution : )t(h)t(e)t(s ⊗= .
La réalisation de ces calculs sous la forme d'intégrations n'est possible que lorsqu'on se donne les expressions mathématiques des fonctions à intégrer. Mais le plus souvent, on ne connaîtra de ces fonctions que leurs valeurs successives. Il s'agira par exemple de signaux de mesure. Dans ce cas, la réalisation des calculs se fera sous forme numérique. Le traitement numérique impose de remplacer les expressions intégrales par des sommes discrètes. On montre que ce remplacement affecte peu les résultats des calculs sous certaines conditions de supports bornés.
On sait par exemple :
- qu'un signal non périodique peut être représenté par une série de Fourier à condition qu'il soit de durée finie (afin de pouvoir le considérer répété périodiquement),
- qu'un signal continu peut être assimilé à une succession d'impulsions de durée finie à condition que la fonction de transfert du système soit de support borné (afin que les composantes en fréquence qui différencient une impulsion de durée finie, d'une impulsion de durée infiniment courte, soient affectées d'un gain nul et ne soient donc pas perceptibles en sortie du système).
En pratique, les logiciels de traitement numérique permettront de réaliser sans difficulté, les opérations d'analyse en fréquence, de filtrage numérique et autres, pourvu que l'on respecte des conditions d'échantillonnage et de pré-filtrage des signaux (qui n'ont pas à été présentées ici).
Une autre méthode de résolution consiste à intégrer numériquement les équations qui régissent le comportement du système. Cette dernière présente l’inconvénient de reposer sur une mise en équations, donc parfois, sur une modélisation difficile. On peut lui préférer l’utilisation des caractéristiques H(ν) ou h(t) qui sont mesurables sur le système, lorsque celui-ci existe.
Pour une même forme de signal d’entrée, un étalement de l’échelle des temps équivaut à une contraction de l’échelle des fréquences. Dans le cas d'un système à un degré de liberté, ceci conduit à quantifier les conséquences des phénomènes dynamiques en fonction du rapport d'une durée caractéristique du signal d'entrée et de la période propre du système.
___________________________________________________________________________


















