Méthodes statistiques pour la modélisation des facteurs influençant ...
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
1 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
INSA de Strasbourg – Spécialité GENIE CIVIL
Rapport final de Projet de Fin d’Etudes
« Etude sur les facteurs influençant la
qualité et la représentativité des essais
au déflectomètre portable »
Superviseurs : DORE Guy, BILODEAU Jean-Pascal
Encadrant INSA : REGENASS Pierre
Auteur : DEJEAN Alexis, élève-ingénieur de 5ème année
18 Juin 2011
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
2 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Annotations du correcteur :
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
3 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Remerciements
Je souhaite en premier lieu, remercier toutes les personnes qui ont contribué au très bon déroulement
de mon Projet de Fin d’Etudes, réalisé au sein du Groupe de Recherche en Ingénierie des Chaussées de
l’université LAVAL et plus particulièrement au sein de la Chaire de recherche i3C, et qui m’ont permis de
mener à bien mon projet et de tirer bons nombres d’enrichissements personnels au cours de cette
expérience.
Je commencerais par remercier de tout cœur mes parents Guy et Colette DEJEAN, eux qui ont été les
instigateurs de mon goût pour les études et qui m’ont toujours permis de poursuivre celles-ci aussi bien
au niveau du soutien financier, que du soutien moral et affectif.
Je continuerais en remerciant vivement monsieur Guy DORE (professeur titulaire au sein du
département de Génie Civil de l’université LAVAL) qui m’a accepté au sein de son équipe de recherche et
qui, malgré la distance, s’est toujours montré très disponible, très à l’écoute et très impliqué dans notre
projet commun.
Je remercie également monsieur Pierre REGENASS (enseignant-chercheur au sein du département de
Génie Civil de l’INSA de Strasbourg), qui m’a suivi tout au long de mon projet en tant qu’encadrant INSA
et qui s’est également montré très disponible malgré des conditions de communication difficiles, me
faisant part de conseils avisés à chaque fois que je l’ai sollicité.
J’en viens à remercier Jean-Pascal BILODEAU et Jérôme FACHON (respectivement enseignant-chercheur
et chercheur titulaire) qui m’ont épaulé au quotidien, qui ont contribué aux discussions constructives
permettant de faire avancer mon projet et qui ont contribué à instaurer, dès le début de mon stage, un
climat de confiance et de bonne humeur.
Je remercie également l’entreprise danoise Grontmij / Carl Bro qui a sponsorisé mon projet de fin
d’études.
Je remercie également chaleureusement les étudiants en maîtrise du laboratoire de chaussée qui ont été
très amicaux dès les premiers jours et au côté de qui, il fut très plaisant de travailler.
Enfin, je tiens à remercier l’ensemble des partenaires et sponsors de la Chaire de recherche sans qui la
réalisation de mon projet de recherche aurait été impossible, aussi bien de par l’absence de leur soutien
financier que de leur apport technologique.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
4 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Sommaire
Chapitre 1 – Revue littéraire
Introduction ................................................................................................................................................... 9
I. Description du LWD et Principe................................................................................................................ 10
I.1 - Historique et contexte de développement du LWD ........................................................................ 10
I.2 - Description ....................................................................................................................................... 11
I.3 - Principe d’utilisation ......................................................................................................................... 12
I.4 - Principes théoriques ......................................................................................................................... 13
I.4.1 – La zone de contraintes significatives ........................................................................................ 13
I.4.2 – Comportement mécanique fondamental des sols et matériaux granulaires........................... 15
I.4.3 – Passage de la déflexion au module réversible ......................................................................... 15
II. Etudes réalisées sur le LWD – Corrélations ............................................................................................. 17
II.1 – Corrélations entre LWD avec FWD ................................................................................................. 17
II.1.1 – Retour sur les études antérieures ........................................................................................... 17
II.1.2 – Discussions ............................................................................................................................... 18
II.2 - Corrélations et comparaisons entre le LWD et les autres PFWDs .................................................. 19
II.2.1 – Corrélations entre LWD et divers essais .................................................................................. 19
II.2.2 – Comparaisons entre le LWD et d’autres dispositifs de mesures ............................................. 20
III - Facteurs influençant les essais au LWD et les limites de son ................................................................ 22
utilisation ..................................................................................................................................................... 22
III.1 - Facteurs liés au matériau, à l’environnement et au dispositif ....................................................... 22
III.1.1 – Facteurs liés aux matériaux et à l’environnement ................................................................. 22
III.1.1.4 – Type de distribution de contrainte ...................................................................................... 25
III.1.2 – Facteurs liés à la surface de contact ....................................................................................... 27
III.1.3 – Facteurs liés aux caractéristiques du dispositif ...................................................................... 30
III. 2 - Limites théoriques ......................................................................................................................... 32
III.2.1- Remise en cause de l’utilisation des lois d’élasticité................................................................ 32
III.2.2- Interprétation du pic de déflexion ........................................................................................... 33
Conclusion ................................................................................................................................................... 35
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
5 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Chapitre 2 – Modélisation sous Géostudio
Contexte et Présentation ............................................................................................................................ 37
I. Modélisation sous Géostudio d’un essai au LWD sur sol granulaire .................................................. 37
I.1 - Détermination de la charge .............................................................................................................. 37
I.2 - Conditions limites ............................................................................................................................. 39
I.3 - Paramètres divers ............................................................................................................................ 39
I.3.1 - Matériaux .................................................................................................................................. 39
I.3.2 - Maillage ..................................................................................................................................... 40
II. Résultats et Discussions ...................................................................................................................... 40
II.1 - Résultats .......................................................................................................................................... 40
II.2 - Analyse ............................................................................................................................................ 42
II.3 - Validation de la modélisation .......................................................................................................... 44
III. Modélisation sous Géostudio d’un essai au LWD sur une plaque de UHMW ................................ 48
III.1 – Description de la modélisation ...................................................................................................... 48
III.2 – Résultats et Analyse ...................................................................................................................... 49
Chapitre 3 – Campagne expérimentale
Introduction, contexte et objectifs.............................................................................................................. 51
I. Le dispositif expérimental ................................................................................................................... 52
I.1- Le Prima 100 ...................................................................................................................................... 52
I.1.1 - Description des pièces de l’appareil .......................................................................................... 52
I.1.2 - Comment choisir la plaque de chargement .............................................................................. 55
I.1.3 - Vérification de la calibration ..................................................................................................... 56
I.1.4 - Instructions d’utilisation ............................................................................................................ 56
I.2- Le support d’essai .............................................................................................................................. 58
I.3 – Le capteur de contrainte ................................................................................................................. 61
I.3.1 - Principe de fonctionnement des capteurs à fibre optique ....................................................... 61
I.3.2 - Choix de notre capteur .............................................................................................................. 64
II. Le déroulement des essais - Étude de l’uniformité de la distribution de contrainte sous la plaque .. 65
II.1 - Principe général de la campagne d’essais ....................................................................................... 65
II.2 – Description des différents cas de figure selon les premiers résultats ............................................ 67
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
6 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
III. Résultats et Analyse ........................................................................................................................ 68
III.1 – Résultats des essais au LWD sur une plaque de UHMW ............................................................... 68
III.1.1 – Répartition de contraintes – Plaque de 300mm – Position Haute ......................................... 69
III.1.2 – Répartition de contraintes – Plaque de 300mm – Position Basse ......................................... 70
III.1.3 – Répartition de contraintes – Plaque de 100mm – Position Haute ......................................... 71
III.1.4 – Répartition de contraintes – Plaque de 100mm – Position Basse ......................................... 72
III.1.5 – Tableau récapitulatif des résultats ......................................................................................... 73
III.2 – Analyse et discussion ..................................................................................................................... 74
III.2.1 – Caractéristiques des répartitions de contraintes ................................................................... 74
III.2.2 – Uniformité et variabilité des résultats .................................................................................... 75
III.2.3 – Coefficients de correction ...................................................................................................... 75
Chapitre 4 - Conclusion
Bibliographie................................................................................................................................................ 78
Annexe 78
Chapitre 1 - Table des illustrations
Figure 1 : Schéma descriptif d’un LWD ....................................................................................................... 11
Figure 2: Schématisation du bulbe de contraintes significatives (d’après Lambert. 2007) ........................ 14
Figure 3 : Cheminement Contrainte-Déformation dans un matériau granulaire (d’après Dawson 2001) . 15
Figure 4: Corrélation entre MFWD et ELWD, comparaison entre Nazzal (2003) et Flemming et col (2000),
(d’après Nazzal. 2003) ................................................................................................................................. 18
Figure 5 : Tableau comparatif entre LWD et d’autres dispositifs de mesures suivant différents critères
caractéristiques (d’après Lambert 2007) .................................................................................................... 21
Figure 6 : Courbes de déflexion, fournies par le LWD, d’une couche de sable suivant une augmentation
de l’effort compactif (d’après Fleming. 2006) ............................................................................................. 24
Figure 7 : Notation en coordonnées polaires utilisées dans les équations de Boussinesq ......................... 25
Figure 8 : Tableau des facteurs de correction en fonction du type de distribution de contrainte ............. 27
Figure 9 : Graphique comparatif de la déflexion en fonction de la qualité du contact (d’après Fleming
2006) ............................................................................................................................................................ 28
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
7 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 10 : Effet d’impacts répétés au LWD sur une couche de sable: zone de déformation permanente et
zone de perturbations sous le pied du géophone (d’après Fleming. 2006) ................................................ 29
Figure 11 : Tableau d’effets de la température du tampon de caoutchouc sur les résultats fournis par le
LWD (d’après Fleming et col. 2006) ............................................................................................................ 31
Figure 12 : Graphique de répartition des contraintes et de l’accélération dans le temps, suivant la
profondeur (d’après Fleming. 2000) ........................................................................................................... 33
Figure 13 : déphasage entre le pic de chargement et le pic de déflexion (d’après Flemming 2006) ......... 34
Chapitre 2 - Table des illustrations
Figure 14 : Répartition des contraintes en fonction du module du matériau (d’après Ullidtz 1998) ......... 37
Figure 15 : Schématisation de la transmission de la charge lors d'un essai au LWD .................................. 38
Figure 16 : Application de la charge sous Géostudio .................................................................................. 38
Figure 17 : Conditions limites sous Géostudio ............................................................................................ 39
Figure 18 : Nœuds étudiés - Interface Plaque de chargement / Matériau ................................................. 40
Figure 19 : Répartitions de contrainte pour des matériaux granulaires de modules compris entre 10 et
550 MPa - Modélisation sous Géostudio .................................................................................................... 42
Figure 20 : Tableau comparatif des résultats obtenus sous Géostudio ...................................................... 42
Figure 21 : Evolution des contraintes en bordure et au centre de plaque sous Géostudio........................ 43
Figure 22 : Tableau comparatif des coefficients de correction ................................................................... 44
Figure 23 : Validation du Modèle - Modélisation sous WinJuléa ................................................................ 45
Figure 24 : Validation du Modèle - Modélisation sous Géostudio .............................................................. 46
Figure 25 : Evolution des contraintes suivant la profondeur - WinJuléa VS Géostudio .............................. 47
Figure 26 : Modélisation d’un essai en laboratoire au Prima sur une plaque de UHMW sous Géostudio . 49
Figure 27 : Tableau récapitulatif des résultats de la modélisation des essais sur une plaque de UHMW
sous Géostudio ............................................................................................................................................ 49
Chapitre 3 - Table des illustrations
Figure 28 : Pièces et accessoires du Prima 100, développés et commercialisés par Carl Bro .................... 55
Figure 29 : Schématisation du support d'essai – Dimensions de la plaque en UHMW .............................. 59
Figure 30 : Schéma de principe d’un transducteur de contrainte à fibre optique (d’après Opsens®). ...... 62
Figure 31: Schéma de principe du Prosens (d’après Opsens®). .................................................................. 63
Figure 32 : Détermination des microdéformations attendues lors des essais sur la plaque de UHMW .... 64
Figure 33: Morphologie du Prima 100 ........................................................................................................ 65
Figure 34 : Repérage de la plaque et du LWD - déplacement du Prima 100 suivant l’axe A – A’ ............... 66
Figure 35 : Repérage de la plaque et du LWD - déplacement du Prima 100 suivant l’axe B – B’ ............... 66
Figure 36 : Représentation des différentes orientations testées – 2nd cas de figure .................................. 67
Figure 37 : Illustration de la campagne expérimentale réalisée en laboratoire ......................................... 68
Figure 38 : Tableau récapitulatif des résultats expérimentaux et modélisés ............................................. 73
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
8 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 39 : Représentation des effets de bord pour la plaque de 100mm de diamètre ............................ 74
Figure 40 : Illustration de la régularité de la symétrie et de la convexité ................................................... 74
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
9 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Chapitre 1 – Revue littéraire
Introduction
Le module réversible d’une chaussée est un paramètre éminemment important dans la
conception des chaussées. Il est largement accepté comme étant la meilleure mesure des propriétés
mécaniques des sols et matériaux routiers. En effet, selon Dawson (2001), la rigidité, traduite par le
module réversible, est le mécanisme clé par lequel la charge est dispersée et transmise de la fondation
jusqu’à un niveau tolérable pour l’infrastructure.
Il existe différentes façons de déterminer le module réversible des matériaux de chaussées. Cependant,
aujourd’hui, il est estimé pour la plupart du temps à partir de relations empiriques utilisant l’indice CBR,
essai présentant certaines limites, et n’est que très rarement déterminé pratiquement. Cela s’explique
par le fait qu’aujourd’hui, l’essai direct le plus courant permettant de déterminer le module réversible
d’une chaussée est l’essai triaxial cyclique. Cet essai nécessite du matériel (presse hydraulique) onéreux
que peu d’établissements peuvent se permettre de posséder.
C’est donc depuis plusieurs années qu’un certain nombre d’infrastructures d’études routières
(entreprises, Ministères des Transports, universités, bureaux de recherche…) ont tenté de développer de
nouveaux moyens de déterminer le module réversible, plus aisément accessible et à moindre coût.
Parmi les différents types d’essais développés, certains établissements ont mis en place un essai en
laboratoire utilisant un Déflectomètre portable à masse tombante (sera par la suite dénommé LWD pour
“Light Weight Deflectometer”) qui est une version plus petite et plus maniable d’un déflectomètre à
masse tombante usuel (sera par la suite dénommé FWD pour “Falling Weight Deflectometer”).
Comme leur nom l’indique, les déflectomètres sont des outils permettant d’obtenir les bassins de
déflexion d’une chaussée et l’étude de ces bassins est appelée déflectométrie. Certains logiciels
permettent alors de déterminer par itérations, les modules réversibles respectifs de chacune des
couches en connaissant leur propre épaisseur (déterminée aisément par forage) et leur coefficient de
Poisson (facilement connaissable). De manière plus générale, la déflectométrie est une méthode
d’auscultation non-destructive des chaussées visant à analyser les caractéristiques structurales de celles-
ci lorsqu’elles sont soumises à une charge d’essai.
Cette revue littéraire s’ancre dans un projet global mené par le Groupe de Recherche en Ingénierie des
Chaussées de l’Université LAVAL, Canada et visant à mettre en place un essai en laboratoire au LWD,
pour la détermination des propriétés mécaniques réversibles des sols et granulats.
Le but de cette revue est d’approcher les principes théoriques et d’utilisation d’un LWD, les limites de
cette approche ainsi que d’étudier les différents travaux ayant été réalisés sur les différents paramètres
influençant l’utilisation d’un LWD.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
10 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
I. Description du LWD et Principe
I.1 - Historique et contexte de développement du LWD
Le premier “Light Weight Deflectometer ” ou LWD a été utilisé pour la première en fois en 1998,
au cours d’un projet de recherche routière du Minnesota (MnROAD), dirigé par le Ministère des
Transports du Minnesota (Mn/DOT).
Le LWD est aujourd’hui, le dernier né d’une grande famille de Déflectomètres portables à masse
tombante (denommés par la suite PFWDs pour “Portable Falling Weight Deflectometer”). En effet, selon
Fleming (2006), le développement des PFWDs a été largement influencé par le caractère encombrant et
peu rapide des méthodes conventionnelles d’Essais de Plaques Statique (Static Plate Bearing Load Tests)
pour les essais in situ et cela fait par exemple près de 20 ans que la “UK Highways Agency “ finance des
investigations sur le développement d’une large gamme de PFWDs.
De la même manière, Fleming (2000 et 2006) rapporte qu’il est acceptable de penser que le FWD qui est
un appareil de grande envergure (le premier modèle fut conçu à la fin des années 1970) et considéré de
plus en plus dans la littérature routière comme étant la référence des appareils à charge dynamiques, est
inadapté dans certaines situations. Selon le chercheur, le coût et la super-sophistication du FWD le
rendent par exemple, peu adéquat pour les essais sur les couches de formes ou de fondations des
chaussées, car ces dernières sont généralement soumises à des contraintes de services situées à
l’extrémité inférieure de la gamme de contraintes proposée par le FWD. Ainsi, l’évaluation du bassin de
déflexion n’est pas nécessaire ou pas fiable. Dans certains cas, le FWD peut également ne pas être
adapté à l’évaluation de certaines chaussées en cours de construction, spécifiquement lorsque les
conditions d’accès sont difficiles ou lorsque l’échelle et la fréquence d’essais deviennent
antiéconomiques.
Ce sont donc ces raisons qui ont poussé au développement de PFWDs, utilisés pour déterminer le
module de rigidité sur terrain, dont les plus connus, mis à part le LWD, sont :
� Le TFT : “Transport Research Laboratory Foundation Tester “ qui était un prototype de recherche
et qui fut développé en 1992 au Royaume-Uni, similaire en tous points au LWD mis à part le fait
qu’il possède une plaque de chargement plus lourde.
� Le GDP : “German Dynamic Plate” aussi connut sous le nom de “Lightweight Drop Tester” selon
Kudla et coll. (1991), cités dans Flemming 2000.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
11 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
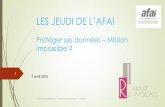
I.2 - Description
Figure 1 : Schéma descriptif d’un LWD
1 : Support comportant des aimants permettant de maintenir la masse 2 en l’air et de déclencher la
chute libre au moment désiré. Le dispositif permet également d’ajuster la hauteur de chute.
2 : Masse cylindrique tombante de 10 à 20 kg, dont on déclenche la chute libre dès que souhaité.
3 : Barre graduée guidant la chute libre de la masse et permettant de choisir avec précision la hauteur de
chute.
1
2
3
4
7
6
9
8
5
10
11
12
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
12 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
4 : Tampons en caoutchouc superposés évitant un contact acier – acier lors du choc du à la chute de la
masse.
5 : Support contenant la cellule de charge 11.
6 : Plaque en acier transmettant l’effort induit par la chute de la masse au sol. Cette plaque est amovible
et l’utilisateur peut alors choisir de réaliser des essais avec une plaque de 150 mm de diamètre à 300
mm de diamètre.
7 : Coussinet en caoutchouc visant à améliorer l’uniformité du contact Déflectomètre – Sol.
8 : Boitier où l’on peut brancher les 2 géophones additionnels et qui transmet les informations concernant
les déflexions enregistrées par câble ou Bluetooth.
9 : Géophones (=capteurs de positions) enregistrant les changements de position induits par la
déformation de la chaussée due à l’effort transmis par la masse.
10 : Règle graduée permettant de placer les géophones additionnels à une distance connue du centre de
la plaque.
11 : Cellule de charge permettant d’enregistrer la charge transmise par la chute de la masse.
12 : Dispositif type PDA (“Personal Digital Assistant“ ou Assistant Numérique Personnel) permettant
d’afficher et de stocker les données transmises par les géophones. Support du logiciel permettant
d’afficher directement la valeur du module réversible obtenu.
I.3 - Principe d’utilisation
Selon Fleming (2006), le LWD utilise en substance un principe identique ou très similaire à celui
du FWD avec pour seule différence fondamentale, une ampleur et une durée d’impulsion de charge
réduites dans le cas du LWD (c'est-à-dire l’utilisation de masse plus petite) afin de continuer à garantir la
portabilité.
Dans sa configuration initiale, le LWD ne possède qu’un seul géophone situé au centre de sa plaque de
chargement. Cependant, il est possible de connecter 2 géophones additionnels, portant à 3 le nombre de
géophones utilisés.
En accord avec Fleming (2000 et 2006), le principe du dispositif est qu’une masse tombante, guidée
durant sa descente, vient impacter la plaque de chargement via le tampon en caoutchouc, fournissant
ainsi une impulsion transitoire de charge au sol situé sous l’appareil. Une cellule de charge est située
juste en dessous des tampons en caoutchouc et vient mesurer la charge transmise à la chaussée. Un
carter de protection situé dans la plaque de chargement héberge le transducteur (dispositif transformant
une grandeur physique en une autre) qui va mesurer la déflexion qui servira par la suite à déterminer la
valeur du module élastique de rigidité. Le signal reçu par les géophones est alors transmis (par cable ou
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
13 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
par Bluetooth) au PDA et qui le transforme à son tour en un graphique présentant les déflexions
mesurées : on obtient alors le bassin de déflexion. Ainsi, à tout moment de la campagne de mesures, les
données peuvent être visualisées par l’opérateur. Elles peuvent alors être transférées vers Excel ou Word
pour être traitées si besoin est. On notera par ailleurs que l’alimentation sur terrain se fait par batteries.
Pratiquement, lorsque l’on réalise un essai par LWD, les auteurs (Fleming (2006), Lambert (2007), Horak
(2008)) s’accordent à dire qu’en général, on privilégie une pression transmise au sol de 566 kPa, obtenue
par exemple avec un poids tombant total de 40 kN et une plaque de chargement de 300mm de
diamètre. Il s’agit en réalité de la pression correspondante à la moitié de la charge appliquée lors du
passage d’un essieu simple à pneus jumelés (il s’agit de la charge standard dans la plupart des
documents de la littérature). La durée idéale de l’impulsion transitoire est d’environ 40 millisecondes,
d’après une étude menée par Fleming et Rogers (1995).
Néanmoins, Lambert (2007) fait remarquer que le niveau de contrainte appliquée par le LWD peut être
ajusté du fait qu’ils mesurent la contrainte transmise durant l’essai. Ainsi, si par exemple, la déflexion
mesurée n’entre pas dans la gamme des déflexions mesurables par le transducteur, on peut diminuer la
charge jusqu’à obtenir une déflexion mesurable. Les matériaux granulaires sont également sensibles aux
contraintes et le fait de pouvoir faire varier la charge appliquée permet d’évaluer la sensibilité aux
contraintes du matériau.
I.4 - Principes théoriques
I.4.1 – La zone de contraintes significatives
Lambert (2007) indique que la zone de contrainte significative à considérer lors d’un essai au
LWD est la zone où la contrainte est supérieure à 10% de la contrainte appliquée (généralement 566
kPa). Les études de Whitelow (2001) et Peterson et coll. (2006) ont démontré que cette zone significative
correspondait en réalité à un bulbe s’étendant horizontalement sur 0,9 fois le diamètre de la plaque de
chargement, pris à partir du centre de celle-ci. Cette valeur est généralement retenue dans la littérature.
Les essais menés par Nazzal et coll. (2004) en laboratoire, sous un environnement contrôlé, ont quant à
eux mis en évidence que le bulbe de contrainte significative s’étendant jusqu’à une profondeur de 1,5 à
2 fois le diamètre de la plaque de chargement, pris à partir de la surface et que cette zone
correspondrait à volume d’environ 3000cm3.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
14 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 2: Schématisation du bulbe de contraintes significatives (d’après Lambert. 2007)
Avec principalement :
Zone de contraintes significatives = zones de contraintes > 10% de la contrainte appliquée
x = étendue horizontale de la zone de contrainte significative ≈ 0,9 fois B (mm)
y = étendue verticale de la zone de contrainte significative ≈ 1,5 à 2 fois B (mm)
B = diamètre de la plaque de chargement (mm).
On note cependant que l’étude de Fleming et Rogers (1995) a suggéré qu’une durée d’application de
charge plus courte entrainait une diminution de la zone de contrainte significative et donc que celle-ci
est variable et que même si les valeurs exprimées ci-dessus restent couramment acceptées dans la
littérature, il n’y a pas d’indications définitives.
Ces considérations de zone de contraintes significatives sont par exemple à prendre en compte lors de la
conception d’un essai en laboratoire. En effet, le moule contenant l’échantillon sur lequel on souhaite
réaliser les essais doit avoir des dimensions permettant d’englober largement la zone de contraintes
significatives afin de pouvoir limiter au maximum les effets de bords.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
15 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
I.4.2 – Comportement mécanique fondamental des sols et matériaux granulaires
La figure suivante représente le cheminement Contrainte-Déformation d’un matériau granulaire, sous
l’application d’un chargement déviatorique (pression de confinement déduite de la pression axiale)
cyclique :
Figure 3 : Cheminement Contrainte-Déformation dans un matériau granulaire (d’après Dawson 2001)
À σ donné, on observe qu’une partie de la déformation induite est réversible (ou résiliente) et l’autre
partie est permanente (ou plastique).
On a: ���� =�� +�� Les couches granulaires des chaussées ont un comportement non linéaire et présentent une réponse
élasto-plastique indépendante du temps sous l’action du trafic.
La réponse réversible des matériaux granulaire est caractérisée par le Module Réversible MR et le
coefficient de Poisson réversible νR.
I.4.3 – Passage de la déflexion au module réversible
Concrètement, lors de l’impact dû à la chute de la masse, le géophone va enregistrer la position
la plus basse atteinte (qui s’avère être la somme d’une déformation permanente et d’une déformation
réversible) puis enregistrer la position à laquelle il revient (lors de la disparition de la déformation
réversible).
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
16 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
D’après Doucet, Robert et Saint-Laurent (2002), les matériaux granulaires présentent généralement un
comportement élasto-plastique non-linéaire anisotrope, ce qui est nettement plus complexe que le
comportement élastique linéaire (caractérisé lui, par le Module d’Young E et le coefficient de Poisson ν).
Or Seed et coll. (1962), cités dans Doucet, Robert et Saint-Laurent (2002), ont défini le Module Réversible
comme l’équivalent du module d’Young pour les matériaux granulaires.
On utilise donc souvent comme hypothèse simplificatrice que les matériaux granulaires sont homogènes
et isotropes, ce qui limite l’analyse élastique à deux paramètres :
- Le Module Réversible MR
- Le Coefficient de Poisson Réversible νR
D’autre part, Doucet, Robert et Saint-Laurent (2002) affirment que le niveau de sollicitation des
matériaux granulaires dans la chaussée entraîne un comportement quasi-élastique, ce qui justifie
l’utilisation du module réversible avec les lois de l’élasticité pour la conception. Il est par ailleurs reconnu
que le comportement mécanique des matériaux granulaires de chaussée est fonction de l’état de
contrainte, donc non-linéaire. Cette particularité implique que la caractérisation du module réversible
doit être effectuée aux différents niveaux de contrainte susceptibles d’être rencontrés dans la chaussée
(ce qui est réalisable du fait de l’adaptabilité des charges pouvant être appliquées par le LWD).
Donc d’après les considérations précédentes, très souvent dans la littérature, les analyses de résultats
obtenus par déflectomètres utilisent les hypothèses simplificatrices suivantes :
� l’énergie de chute libre est considérée comme une charge dynamique
� les couches de forme sont considérées comme des couches à comportement élastique idéal.
En accord avec une étude réalisée par des chercheurs de l’université de Chonnam, Corée du Sud (2004),
la détermination du module réversible à partir de la déflexion obtenue par le LWD et en utilisant les lois
de l’élasticité se réalise suivant les étapes suivantes :
�� = ∗ � ∗ � Avec : �� = Force d’impact (N) = masse tombante (kg) � = Hauteur de chute (cm) � = accélération de la gravité = 9,81 m.s-2 La pression uniforme appliquée au patin du LWD est obtenue d’après la relation suivante :
� = ��� Avec : � = pression uniforme (kPa) � = Surface du patin (m²)
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
17 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Le module réversible E est alors obtenu à partir de l’équation :
� =� ∗ � ∗ � ∗ (1 − ��)� Avec :
E = Module réversible (MPa)
A = Facteur de rigidité de la plaque = 2 si la plaque est souple et π/2 si la plaque est rigide � = pression uniforme (kPa) r = rayon de la plaque (m)
ν = Coefficient de Poisson (généralement compris entre 0,3 et 0,45 en fonction du type de matériel à
tester)
d = pic de déflexion (mm)
NB : Les limites de ce modèle seront étudiées dans la partie III de cette revue.
II. Etudes réalisées sur le LWD – Corrélations
II.1 – Corrélations entre LWD avec FWD
D’après Fleming (2006), le FWD est un appareil utilisé depuis près de 25 ans et considéré
aujourd’hui par la plupart des auteurs et chercheurs comme étant la référence des appareils à charge
dynamique. C'est pourquoi beaucoup d’entre eux ont mis en place des corrélations entre le FWD et
divers PFWDs. Cette partie a pour but d’approcher des études ayant procédé à des corrélations entre
FWD et LWD.
II.1.1 – Retour sur les études antérieures
Horak (2008) ainsi que des études menées par l’Institut routier danois (citées dans la revue
TAC/ATC Avril 2004) rapportent que les différentes études menées sur les corrélations entre LWD et
FWD ont laissé apparaitre certaines divergences, du fait des différents matériaux et structures de
chaussée testés.
Par exemple, Livneh et Goldberg (2001) rapportent que le module de rigidité obtenu via les valeurs
données par le LWD était environ égal à 0,3 à 0,4 fois le module de surface déterminé avec le FWD. Les
auteurs citent également les études de Flemming (1998 et 2000) qui établissent quant à elles des
rapports de corrélations entre 0,5 et 0,6.
Par ailleurs, Nazzal (2003) démontre que le meilleur modèle pour prédire le module résilient de surface
rétrocalculé du FWD ���� (MPa), à partir du module résilient de surface obtenu par LWD ���� (MPa), est :
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
18 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
��� (MPa) = 0,97 *���� (MPa) avec un coefficient de corrélation de R² = 0,94 et pour 12,5 MPa < ���� < 865 MPa
Avec : ��� = le module résilient de surface rétrocalculé obtenu par FWD ���� = le module résilient de surface obtenu par LWD
Cette corrélation obtenue par Nazzal (2003) s’est trouvée être en accord avec les corrélations obtenues
par une étude de Fleming et Frost (2000).
Figure 4: Corrélation entre MFWD et ELWD, comparaison entre Nazzal (2003) et Flemming et col (2000),
(d’après Nazzal. 2003)
Steinert et coll. (2005), cités dans Guiamba (2008), établissent quant à eux des coefficients de
corrélations compris entre 0,35 et 0,95.
II.1.2 – Discussions
On observe comme prévu par Horak (2008) des divergences entre les différentes études de
corrélation. Cependant, les différences de structures et de matériaux de chaussées ne semblent pas être
les seules causes de ces divergences.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
19 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
En effet, en accord avec les observations de Flemming et coll. (2000) et Rahimzadeh (2004), cités dans
Horak (2008), la relation corrélative entre FWD et LWD est dépendante du type et de la rigidité du
matériel (c'est-à-dire de la rigidité des tampons de caoutchouc, de la plaque de chargement, du patin
assurant le contact appareil/surface…).
Par exemple, d’après Rahimzadeh (2004), si la configuration par défaut du LWD utilise une plaque rigide
(facteur de rigidité de plaque égale à 2 au lieu de !� pour une plaque flexible), on doit appliquer un
facteur de correction tel que :
����(MPa) = 1,273 ∗ ���� (MPa).
Enfin, selon Fleming (2006), la couche supérieure de la chaussée a une grande influence sur la
corrélation entre le LWD et le FWD. La première explication quant au fait que le LWD enregistre une plus
petite déflexion et un plus grand module élastique réside dans la plus petite zone de contrainte induite
par le LWD sur le sol. Il est considéré que ceci est dû à la durée d’application plus longue pour le FWD (35
ms) par rapport au LWD (15 à 20 ms).
Selon l’auteur britannique, la fréquence de chargement ainsi que l’épaisseur et la rigidité des couches de
chaussées semblent être les facteurs influençant le plus la corrélation entre LWD et FWD.
II.2 - Corrélations et comparaisons entre le LWD et les autres PFWDs
II.2.1 – Corrélations entre LWD et divers essais
II.2.1.1 – Corrélation entre Module Réversible et Coefficient de réaction du sol support – Utilisation d’un LWD
Une équipe coréenne de la “Chonnam National University”, Corée du Sud (2004) a réalisé une
étude afin d’évaluer le module des couches de forme compactées. Ils ont également cherché à identifier
une corrélation entre le Module réversible d’une chaussée et le coefficient de réaction du sol support (ce
coefficient traduit le comportement ressort du sol support). Pour cela, les chercheurs ont utilisé un LWD
comme dispositif permettant d’obtenir le module réversible de la chaussée et ont procédé à un essai de
charge statique sur plaque pour évaluer le coefficient de réaction du sol support.
Concernant le LWD, 6 configurations de hauteur de chute et de masse tombante ont été reproduites afin
de produire 6 cas de charges dynamiques différents.
On notera également que dans cette étude, les auteurs ont supposé que la pression de contact entre le
patin en caoutchouc du LWD et la surface de la chaussée était uniforme.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
20 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Les résultats montrent qu’il existe une assez bonne corrélation linéaire entre le module réversible et le
coefficient de réaction du sol support :
���� = 2,0 ∗ *+, , présentant un coefficient de corrélation R² = 0,76 Avec : ���� = Module réversible mesuré au LWD *+, = Coefficient de réaction du sol support
Ces mêmes résultats ont aussi montré que le module réversible mesuré au LWD n’était que faiblement
influencé par la variation de l’énergie de chute.
Il fut enfin déduit de cette étude que l’utilisation d’un LWD pour le contrôle du compactage, en lieu et
place d’un essai de charge statique par plaque (Plate-Bearing Load Tests), conduirait à des économies
significatives.
On notera également que d’autres études ont montré une forte dépendance des résultats à la contrainte
appliquée. La plus petite contrainte réalisable avec le plus petit modèle de FWD étant de 100 kPa, valeur
moyenne de contrainte appliquée pour un LWD.
II.2.1.2 – Corrélations entre TFT, FWD et LWD
D’après Fleming et coll. (2000), cités dans Fleming (2006), le TFT donne une gamme de facteurs
de corrélation de 0,8 à 1,4 FWD. Cette gamme de coefficients de corrélation a été établie à partir de 200
essais comparatifs, réalisés sur toute une gamme de couches de chaussée de granulométrie différente.
TFT et LWD ont été également comparés sur une chaussée dimensionnée sur mesure et les résultats
obtenus donnent une corrélation de TFT = 0,96 LWD (Coefficient de détermination R² = 0,92).
De la même manière que pour les corrélations entre FWD et LWD, il a été démontré que ces coefficients
de corrélation étaient relativement influencés par le matériel testé.
II.2.2 – Comparaisons entre le LWD et d’autres dispositifs de mesures
Une comparaison a été réalisée par Lambert (2007) entre le LWD, le FWD, le GDP et les essais
statiques de plaque concernant la pertinence de l’utilisation de ces dispositifs dans le cadre d’un projet
de mise en place d’un essai en laboratoire. Les critères pris en compte sont l’opérationnalité, la précision
des mesures, le coût… Le tableau suivant permet de récapituler un certain nombre de critères
caractéristiques de chacun des appareils :
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
21 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 5 : Tableau comparatif entre LWD et d’autres dispositifs de mesures suivant différents critères
caractéristiques (d’après Lambert 2007)
NB : Les prix indiqués sont les prix applicables en 2007
L’étude de laquelle est tiré le tableau ci-dessus s’interroge quant au dispositif le plus intéressant pour la
conception d’un essai en laboratoire. Or, d’après Lambert, il apparait évident que le FWD est inadéquat.
Concernant l’aspect du coût d’utilisation des PFWDs, il apparait à première vue que le LWD est
l’alternative la plus couteuse par jour. Cependant, en prenant en compte le nombre d’essais réalisables
par jour, le LWD devient le plus intéressant concernant le rapport coût/Nombre d’essais.
On notera qu’en considérant le tableau précédent et les discussions qui s’en sont suivies, Lambert a
retenu le LWD comme option la plus polyvalente et la plus adaptée à la mise en place d’un essai en
laboratoire. Les avantages clés étant de son point de vue : la capacité d’ajuster le chargement appliqué,
la capacité à changer le diamètre de la plaque de chargement, la capacité à changer l’emplacement du
transducteur et la capacité à utiliser le LWD dans les endroits confinés et difficiles d’accès.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
22 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
De la même manière, Fleming (2006) rapporte que pendant que chacun des PFWDs possédaient leurs
propres avantages et inconvénients, le LWD a émergé comme outil le plus acceptable. En effet, il
conserve une certaine souplesse dans le protocole d’essai ainsi que dans la taille de la plaque de
chargement, de la magnitude de la charge, de la récupération de données, en plus des faits non
négligeables qu’il simule plus précisément le passage d’un véhicule roulant et que son fonctionnement
se rapproche de celui du FWD.
III - Facteurs influençant les essais au LWD et les limites de son utilisation
D’après Fleming (2006), malgré les études ayant été réalisées, certaines questions restent en
suspens quant à l’utilisation des PFWDs. Par exemple, une grande partie des recherches du Royaume-Uni
s’est concentrée sur la démonstration de l’utilité et de la fiabilité des PFWDs dans les essais sur terrain.
Par contre, peu d’études ont été menées sur l’influence des variables du matériel d’essais sur les
résultats obtenus.
III.1 - Facteurs liés au matériau, à l’environnement et au dispositif
III.1.1 – Facteurs liés aux matériaux et à l’environnement
III.1.1.1 – Vitesse de chargement
Steinert et coll. (2006), cités dans Fleming et coll. (2006) ont réalisé des études sur la surveillance
de la charge de trafic en fonction des saisons. Il a ainsi été démontré que la relation entre LWD et FWD
variait avec l’épaisseur d’asphalte, la corrélation étant meilleure lorsque la couche d’asphalte est mince.
Concernant la même thématique, Lambert (2007) rapporte que la durée de chargement est significative
lors des tests sur les matériaux bitumineux, à cause de leur comportement visco-élastique. Pour une
chaussée bitumineuse courante, diminuer de moitié le temps total de chargement augmente de 8 à 25 %
la valeur du module de rigidité en fonction du module de l’enrobé bitumineux. C’est pourquoi les valeurs
de rigidité composite mesurées au LWD sur une chaussée bitumineuse sont de 8 à 25 % plus importantes
que celles obtenues au FWD (la durée de chargement du LWD étant environ la moitié de celle du FWD).
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
23 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
III.1.1.2 – Environnement d’essais
Selon Dawson (2001), les matériaux granulaires sont très peu sensibles aux variations de
température en ce qui concerne leur réponse à une charge, tant que celle-ci est supérieure à 0°C.
Par ailleurs, le Ministère des Transports du Minnesota (dénommé par la suite comme MnDOT pour
“Minnesota Department of Transportation”) conseille de ne pas réaliser d’essai au LWD à moins de 600
mm de la nappe phréatique.
Dans son rapport de thèse, Lambert (2007) rapporte que la rigidité des matériaux non-liés est sensible
aux changements de teneur en eau et de contrainte appliquée.
Il indique également que les propriétés élastiques ne sont que très peu influencées par la rotation des
contraintes principales induite par le passage d’une roue, il n’est donc pas nécessaire de recréer cette
condition lors d’un essai.
III.1.1.3 – Compactage du matériau testé
D’après les travaux de Fleming (2006), l’interprétation de la déflexion maximum et l’utilisation du
graphique temporel de déflexion doivent être prises en compte pour indiquer la mauvaise qualité de
l’impact ou la mauvaise qualité du sol.
Lors de ces travaux, une profondeur de sol d’environ 100 mm a été excavée d’une couche de 400 mm
d’épaisseur d’un matériau granulaire. Un sable bien calibré a ensuite été déposé en une couche de 100
mm d’épaisseur, compacté par étapes durant lesquelles on a procédé à des essais au LWD.
Le graphique ci-dessous montre les effets du compactage sur la couche de sable, et les conséquences sur
la déflexion fournie par le LWD.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
24 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 6 : Courbes de déflexion, fournies par le LWD, d’une couche de sable suivant une augmentation
de l’effort compactif (d’après Fleming. 2006)
L’intérêt particulier de ce graphique est que la déflexion maximale enregistrée (et donc celle utilisée
dans le calcul de la rigidité) et affichée par l’ordinateur de poche est la déflexion maximum, sans tenir
compte de son occurrence dans le temps comparativement à l’occurrence dans le temps du pic de
chargement/pression de contact. Ainsi, la déflexion maximum enregistrée pour chacun des essais « non
compactés », « 2 passes » et « 4 passes » correspond à une valeur erronée, car étant celui le plus à droite
du « petit pic » qui lui a lieu en même temps que le pic de chargement. Dans ces cas, la valeur de rigidité
obtenue par rétrocalculs est une valeur fausse.
On observe que pour 6 passes, le graphique devient plus uniforme bien que le fait de fournir une
amélioration du contact soit clairement établi par le graphique « 6 passes + contact amélioré ». Enfin, il
est important de noter que le pic de déplacement qui a lieu juste après le pic de chargement est très
similaire en magnitude dans les deux cas très compactés. On remarque que l’intérêt d’étudier les
données brutes (sans traitement de logiciel car faussant les résultats) est évident dans le cas de ce sable
bien calibré.
Plus généralement, il est également intéressant de noter que l’état de contrainte effective peut
grandement influencer les mesures de rigidité. Par exemple, une surconsolidation entraine un excès de
pression interstitielle, ce qui résulte en une diminution de la rigidité composite et peut également
entrainer des déformations permanentes. Par ailleurs, un surcompactage doit être évité, car il peut
entrainer la dégradation de certaines particules et entrainer une augmentation du pourcentage de
particules fines.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
25 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
III.1.1.4 – Type de distribution de contrainte
D’après Ullidtz (1998), les équations permettant de calculer les contraintes, déformations et
déplacements à partir du module d’Young E et du coefficient de Poisson ν du matériau, dans un espace
semi-infini, homogène, isotrope, linéaire élastique, chargé par une charge ponctuelle P, perpendiculaire
à la surface , furent données par Boussinesq en 1885.
Figure 7 : Notation en coordonnées polaires utilisées dans les équations de Boussinesq
Contraintes Normales :
-. = +/�!01 ∗ 234+5 -� = /�!01 ∗ 632345 ∗ 478�5 − 9:�;9?@ -� = (9:�;)∗/�!01 ∗ 6−2345 + 99?@
Contrainte principale majeure : -9 = +/�!01 ∗ 2345
Contrainte de cisaillement : A�. = +/�!01 ∗ 234�5 ∗ 4785 A�� = A�. = 0
P
r
z
θ
τ
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
26 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
On peut alors noter que la contrainte verticale -. ainsi que la contrainte principale majeure -9 sont indépendantes des paramètres élastiques E et �. Selon les équations de Boussinesq, le module E n’influence donc pas ces contraintes.
Au niveau de la ligne de centre de charge, la contrainte verticale se ramène à :
-. = +/�!01 Ullidtz rapporte par ailleurs que la distance à partir de la charge n’a pas besoin d’être importante avant
qu’une charge ponctuelle ne produise presque la même réponse qu’une charge distribuée sur une
surface. D’après une modélisation réalisée sur le logiciel ELSYM5, Ullidtz montre que les déflexions
déterminées par les équations de Boussinesq et les déflexions déterminées par ELSYM5 sont quasi
identiques, à partir d’une distance d’environ un rayon de plaque de la charge ponctuelle.
Ainsi, si la charge est transmise à l’espace semi-infini via une plaque circulaire complètement rigide, la
distribution théorique de contrainte dans un milieu élastique est donnée par l’équation : -,(�) = BC∗D�√D1:�1 Avec :
-, = valeur moyenne de contrainte F = rayon de la plaque de chargement � = distance entre le centre de la plaque et le point où est déterminée la contrainte La distribution théorique de contrainte sous une plaque complètement rigide induit des valeurs
infiniment grandes en bordure de plaque (quand r tend vers a, -,(�) tend vers l’infini). Cela n’est évidemment pas possible pour un matériau réel de chaussée. Pour un sol fin tel que les argiles, Ullidtz
affirme que la répartition réelle de contrainte ressemble à la distribution théorique (forme concave avec
des valeurs de contraintes élevées en bordure de plaque), tandis que pour les sols grossiers, les valeurs
de contraintes sont faibles en bordure de plaque, du fait de la faible capacité portante des matériaux
granulaires non-confinés (répartition de forme convexe).
Répartition concave pour les sols fins Répartition convexe pour les sols grossiers
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
27 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Les essais utilisant des plaques de chargement peuvent être alors utilisés pour déterminer le module
réversible d’un espace semi-infini, à l’aide de l’équation :
� = G ∗ (1 − ��) ∗ -, ∗ F�, Avec :
�, = Déflexion au centre de la plaque de chargement G = Facteur de correction dépendant de la distribution de contrainte :
Distribution de contrainte Facteur de correction f
Distribution uniforme (plaque souple) 2
Distribution non-uniforme (plaque rigide) π/2
Distribution parabolique (sol fin) 4/3
Distribution parabolique (sol grossier) 8/3
Figure 8 : Tableau des facteurs de correction en fonction du type de distribution de contrainte
NB : L’étude de la répartition de contrainte sous la plaque de chargement du LWD ainsi que la
détermination des facteurs de correction seront les principaux objectifs de mes campagnes
expérimentale et de modélisation.
III.1.2 – Facteurs liés à la surface de contact
Des travaux réalisés par Fleming et coll. (2006) ont évalué l’utilisation du LWD pour un test
d’approbation de matériau en laboratoire. Le but était de voir si le logiciel d’acquisition reconnaissait un
« mauvais » lâché (à savoir la différence de temps entre pic de chargement et pic de déflexion).
La surface supérieure d’une couche compactée de granulats grossiers de 400 mm a été dérangée en
remuant la surface sur une épaisseur de 50 à 100 mm. Le LWD a ensuite été positionné délibérément
dans différentes positions créant une faible uniformité au niveau du contact patin en
caoutchouc/surface. Par la suite, l’aire « inégale » a été remplie par du sable normalisé (1.15mm). Deux
graphiques pression-déformation typiques provenant du dernier des 6 impacts du LWD sont présentés
sur la figure ci-dessous et démontrent clairement l’amélioration dans la régularité de la forme du
graphique correspondant au contact amélioré.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
28 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Figure 9 : Graphique comparatif de la déflexion en fonction de la qualité du contact (d’après Fleming
2006)
Les données récupérées par le PDA (permettant d’obtenir la charge et la déformation en fonction du
temps) permettent d’observer que les résultats obtenus pour des contacts de mauvaise qualité
présentent un petit pic précoce dans le graphique de déflexion. En outre, au cours du test, l’auteur a pu
observer des rebonds et/ou des mouvements horizontaux de l’appareil, ainsi que des vibrations au
travers de l’appareil suggérant encore une faible uniformité du contact.
Cette étude permet également d’observer le phénomène de concentration de contrainte qui entraine
dans certains cas, à pression de contact constante, une déflexion pouvant être jusqu’à 3,5 fois plus
importante dans le cas d’un mauvais contact.
Toutefois, il est évident que la notion de mauvais contact reste subjective et que la qualité d’impact sur
le terrain est difficile à quantifier. Dans l’exemple des travaux de Fleming, une rigidité de 75 MPa a été
observée pour les mauvais contacts alors qu’une rigidité de 145 MPa a été observée pour les contacts de
bonne qualité. Une telle variabilité n’est pas impossible sur le terrain et il existe beaucoup de possibilités
au sein d’une procédure d’essai selon lesquelles l’acceptation ou le rejet des données peut-être décidé.
Ces possibilités sont basées sur la perception de la qualité d’impact de l’utilisateur, ce qui est
contractuellement peu quantifiable. Cet exemple est certainement un cas assez extrême, mais montre
qu’il est utile d’examiner plus en détail les données du signal générées au moment de l’essai, et
éventuellement de développer un sous-programme du logiciel permettant d’identifier les données
provenant d’un essai avec mauvais contact.
Concernant la même thématique, mais en l’abordant de manière plus concrète, le même auteur a
observé le desserrement de la surface et des irrégularités induites par un nombre répété d’essais sur une
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
29 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
couche de sable. Ces perturbations affectent les mesures de rigidité composite lorsque l’on utilise les
essais à plaques et sont dues au fait que l’appareil tremble et vibre pendant l’essai (de manière plus ou
moins prononcée suivant la qualité du contact). Par ailleurs, un contact non-uniforme entraine une plus
grande contrainte appliquée à la surface que la contrainte attendue. Cela entraine une sous-estimation
de la rigidité composite.
À la suite de 6 essais réalisés au LWD sur une couche de sable, on peut observer les perturbations
présentées sur la photographie ci-dessous.
Figure 10 : Effet d’impacts répétés au LWD sur une couche de sable: zone de déformation permanente
et zone de perturbations sous le pied du géophone (d’après Fleming. 2006)
On remarque que la zone de contact du géophone est très perturbée. Ceci s’explique par le fait que le
pied du géophone est étroit et est appliqué sur le sol à l’aide d’un ressort relativement rigide. Ce genre
de perturbation n’est pas inconnue des auteurs et est parfois observé dans les couches de matériaux les
moins rigides. Cependant, la manière dont cette déformation permanente est enregistrée lors de
l’impact n’est pas vraiment claire. Il pourrait être judicieux d’utiliser un géophone à pied plus large pour
les sols les moins rigides. Cet aspect a été étudié lors du développement du TFT (les premiers PFWDs
avaient d’ailleurs un pied plus large). Néanmoins, il est considéré qu’un pied de géophone plus large
augmenterait les effets de contact de bords sur les grosses particules. On notera cependant qu’il s’agit
d’un champ d’études à approfondir.
Finalement, la dégradation du contact plaque/surface dégrade la répétabilité d’un dispositif d’essai, à
l’endroit où les granulats commencent à se séparer de la surface, en particulier là où il y avait un manque
de particules fines.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
30 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
III.1.3 – Facteurs liés aux caractéristiques du dispositif
D’après Fleming (2000), il apparait clairement que les variables liées au dispositif influencent le
résultat des tests de plaque dynamiques telles que l’épaisseur et le type du matériel de tests, la taille de
la plaque, la contrainte de contact, le fonctionnement du transducteur et peut-être le rythme de
chargement. Pour aller plus loin dans l’étude, certains de ces aspects vont être traités dans cette partie.
III.1.3.1 – Influence de l’énergie de chute
Une étude de l’université de Chonnam (2004) fait ressortir qu’une variation dans la hauteur de
chute affecte de manière plus significative la déflexion qu’une variation de masse tombante.
Bien que cette même étude ait montré que le module réversible mesuré au LWD n’était que faiblement
impacté par la variation de l’énergie de chute, on peut noter qu’augmenter l’énergie de chute (donc plus
particulièrement la hauteur de chute) peut augmenter la fiabilité du LWD du fait de la plus large zone
affectée, due à la plus grande force d’impact.
III.1.3.2 – Influence du diamètre de la plaque de chargement
Selon Fleming (2000), la réduction du diamètre de la plaque montre une plus grande influence
sur la rigidité des couches supérieures, ce qui démontre donc clairement la superficialité de la
distribution de contrainte sous surface, comme prévu par la théorie élastique.
Par ailleurs, Lambert (2007) rapporte qu’il a été démontré que placer le transducteur directement sur la
chaussée plutôt que sur la plaque de chargement permet d’obtenir des mesures de déflexions plus
précises. L’étude de Fleming (2000) abonde dans ce sens indiquant qu’une comparaison avait été
réalisée au cours du développement de certains PFWDs, entre le fait de positionner le pied du
transducteur de vélocité sur le patin ou directement sur le sol (à travers un trou au centre du patin). Il
s’est avéré que pour les fondations très rigides, positionner le pied sur le sol proposait une plus grande
magnitude de résultats de rigidité et correspondait à une meilleure corrélation avec les résultats obtenus
avec le FWD. C’est donc cette configuration qui a été retenue pour le LWD.
III.1.3.3 – Influence du tampon en caoutchouc
L’étude de Fleming (2000) a permis d’observer que si la rigidité du tampon en caoutchouc
diminue, l’impulsion de charge de la masse tombante devient plus symétrique, indiquant un transfert
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
31 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
énergétique plus efficace. Cependant, il a été démontré que pour des hauteurs de chutes importantes,
certains tampons de faible rigidité (par exemple, ceux dont la raideur de ressort équivalente est de 150
kN/m ou moins) dépassaient leur limite linéaire élastique.
Par ailleurs, une étude de Fleming et coll. (2006) au cours de laquelle ont été réalisés des essais contrôlés
en laboratoire dont le but était d’observer la fiabilité des appareils. Parmi les paramètres observés, on
retrouve la température du tampon en caoutchouc dont on s’attend à ce qu’elle influence la rigidité du
caoutchouc et donc indirectement la charge transmise au sol.
Figure 11 : Tableau d’effets de la température du tampon de caoutchouc sur les résultats fournis par le
LWD (d’après Fleming et col. 2006)
Les résultats démontrent que mis à part un Coefficient de Variation assez élevé pour la température
ambiante (ce qui démontre une certaine variabilité des résultats), les valeurs des moyennes de Module
réversible obtenues ne présentent pas de divergences excessives. Par ailleurs, il est évident qu’il est
extrêmement rare de réaliser des essais par des températures de 80 °C ou de -10°C. Les variations de
température ne sont qu’au maximum d’une ou deux dizaines de degrés Celsius, on peut donc s’attendre
à d’encore plus faibles divergences. Finalement, la température du tampon en caoutchouc n’a que peu
d’influence.
III.1.3.4 – Quantification de la variabilité des résultats
Dans la littérature, la plupart des analyses des résultats estiment que le Coefficient de Variation
(CoV) est le meilleur indicateur de variabilité d’une campagne d’essais. En effet, cela peut s’expliquer par
le fait que le CoV ne présente pas d’unité ce qui est souvent un avantage par rapport à la variance, dans
le cas d’analyse de grandeurs physiques. Ainsi, selon Fleming et col (2006), pour une série d’essais,
analyser les résultats sous forme de CoV est utile et plus le CoV est faible, meilleure sera l’uniformité des
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
32 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
résultats. Il est également clair que plus le matériau en place est uniforme et compacté, plus le CoV
faible.
Le Coefficient de Variation est le rapport de l’écart type σ sur la moyenne μ.
III.1.3.5 – Discussion – Configuration idéale
Compte tenu des considérations étudiées précédemment, Fleming (2000) rapporte que
l’influence du changement de rigidité du tampon en caoutchouc, utilisé pour mieux contrôler l’impulsion
transitoire, s’est avéré de première importance. En outre, la masse et le diamètre de la plaque se sont
aussi avérés influents dans l’efficacité du transfert énergétique. Ainsi, il apparait clair que des appareils
utilisant des rigidités de tampons ou des masses de plaques différentes seront enclins à donner des
résultats contrastés pour une même fondation.
Par ailleurs, le chercheur britannique tire de ses investigations, la configuration de l’essai la plus efficace.
Il s’agirait alors d’un tampon en caoutchouc de faible raideur et une plaque relativement légère
(suffisamment lourde pour tout de même assurer la stabilité de l’appareil lors de l’impact). La plus faible
inertie et les effets dynamiques transmis au sol sont alors considérés comme une meilleure simulation
du passage d’un véhicule ainsi qu’une meilleure approximation d’un chargement statique.
On notera également que la rigidité du sol est importante et qu’un sol de grande rigidité aura des effets
similaires qu’une plaque de grande inertie.
III. 2 - Limites théoriques
III.2.1- Remise en cause de l’utilisation des lois d’élasticité
Selon Fleming (2000 et 2006), la première hypothèse à remettre en cause dans les analyses
d’essais au LWD est que ces dispositifs utilisent la théorie élastique pour interpréter un module élastique
de rigidité à partir des données de charge et de déflexion obtenues. Cela implique que l’interaction
complexe des contraintes sur les couches de matériaux est la même pour un essai dynamique que pour
un essai statique. On ne tient donc pas compte de la fréquence de chargement et la déflexion transitoire
maximale est jugée acceptablement équivalente à la déflexion obtenue par plaque statique de même
diamètre et de même sollicitation de contrainte. Par ailleurs, l’interaction entre les différentes couches
est quelque part superposée afin d’obtenir une valeur unique, souvent appelée module composite
élastique de rigidité.
Fleming rapporte également que les déflexions mesurées lors de l’impulsion transitoire induite lors d’un
essai au LWD (aussi bien qu’au FWD), représentent une déformation élastique, même si le transducteur
de vélocité (plus couramment appelé capteur de déplacement) fournit une mesure de la déflexion totale
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
33 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
en chargement, et non en déchargement (présence d’une déflexion permanente ou irréversible). On
peut s’attendre à ce que ces erreurs soient relativement faibles lors d’essais sur matériaux bitumineux
très rigides, ce pour quoi le FWD a été conçu. Cependant, ce n’est certainement pas le cas lors de
mesures sur les couches de fondations de chaussée relativement peu rigide, lesquelles sont plus enclines
à subir des déformations permanentes, ce pour quoi le LWD a été conçu.
Cela implique que le terme « déformation élastique » doit être utilisé avec beaucoup de précautions
lorsque l’on parle de résultats obtenus par essais au LWD.
III.2.2- Interprétation du pic de déflexion
Une étude de Fleming en (2000) s’est intéressée de plus près aux mécanismes de dynamique des
essais par plaques. Des cellules pressiométriques furent installées à différentes profondeurs, sur un
même plan vertical. Plusieurs lâchés de masse ont été réalisés et les résultats obtenus puis analysés par
tableur ont permis de mettre en évidence que la force maximum appliquée possédait 2 composantes : la
force due à la masse tombante et la force due à la plaque
Le graphique suivant rend compte des courbes de contrainte de chacune des cellules pressiométriques
ainsi que les courbes d’accélération de la masse tombante et de la plaque de chargement.
Figure 12 : Graphique de répartition des contraintes et de l’accélération dans le temps, suivant
la profondeur (d’après Fleming. 2000)
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
34 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Avec :
PC = Cellule Pressiométrique (profondeur à laquelle la cellule est enterrée)
Il s’agit d’un graphe obtenu pour un tampon en caoutchouc peu rigide, une masse tombante de 15 kg, un
diamètre de plaque de 150 mm, une hauteur de chute de 0,5 m.
Comme nous pouvons l’observer, la masse décélère tout au long de l’impulsion. La plaque, elle, accélère
puis décélère. Ainsi, on se rend compte que la plaque s’oppose initialement à la force appliquée du fait
de sa propre inertie. Par la suite, on observe que la plaque augmente cette force appliquée, toujours du
fait de son inertie propre, mais cette fois due à sa mise en mouvement. C’est pour cette raison que la
déflexion maximum peut avoir lieu après le moment où la force appliquée est maximale, dépendant ainsi
de l’inertie de la plaque.
Figure 13 : déphasage entre le pic de chargement et le pic de déflexion (d’après Flemming 2006)
Les résultats obtenus pour la plaque de diamètre 300 mm montrent que pour une augmentation de la
hauteur de chute, le pic de décélération de la masse tombante et l’accélération maximale de la plaque
augmentent (pour un tampon en caoutchouc donné). Pour une diminution de la rigidité du tampon en
caoutchouc (et pour un dispositif donné), le pic de décélération ainsi que l’accélération de la plaque
diminuent tous deux. Par ailleurs, la durée des deux impulsions augmente, afin que le total énergétique
reste approximativement constant.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
35 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Dans ses études, Fleming (2000 et 2006) rapporte également que la déflexion induite par la réponse du
sol est interprétée comme une simple intégration du signal du capteur de déplacement au point, dans le
temps, où la force mesurée a atteint son pic. Cela signifie que le pic de déflexion n’est pas réellement
pris en compte (seulement le pic de charge) et des essais annexes ont montré que cela entrainait une
erreur d’environ 2% par rapport à l’intégration de la déflexion maximum.
On tire également de ces résultats qu’il est préférable de considérer la valeur maximale de la déflexion
lors de la détermination du module de rigidité du sol et que l’erreur produite en utilisant la déflexion au
moment du pic de charge sera plus importante pour des tampons et plaques de grande rigidité (du fait
du déphasage plus grand dans le cas de dispositifs rigides).
On notera que l’étude de Flemming (2006) concernant l’influence du compactage sur les courbes de
déflexions et détaillée dans la partie III.1.1.3, permet d’observer un deuxième phénomène pouvant
entrainer des erreurs et que celui-ci constitue également une limite dans l’interprétation du pic de
déflexion. En effet, la déflexion maximum provenant du signal, et interprétée lors du calcul de la rigidité,
est la déflexion maximale enregistrée au cours de l’essai, sans tenir compte de son occurrence dans le
temps, ce qui peut mener à des erreurs si la valeur du pic post-impact est plus importante que la valeur
du pic qui intervient juste après le pic de chargement.
Conclusion
Au travers des différentes études menées au cours de ces dernières années, il est apparu évident
que le LWD est un outil polyvalent, destiné à aider l’ingénieur à prendre des décisions concernant
l’intégrité structurale de nombreuses couches de divers matériaux. Il représente un dispositif de mesures
simple, rapide et efficace permettant d’afficher rapidement les résultats afin de prendre des décisions
directement sur site, menant évidemment à une réelle économie de temps et de coût. De manière
générale, on notera que le LWD représente une alternative au FWD réellement intéressante dans le cas
de matériau faiblement rigide et/ou de site d’accès difficile. Il cumule également les avantages
comparativement aux autres PFWDs : capacité d’ajuster le chargement appliqué, capacité à changer le
diamètre de la plaque de chargement, capacité à changer l’emplacement du transducteur et la capacité à
utiliser le LWD dans les endroits confinés et difficiles d’accès.
Au niveau comparatif, les données et résultats obtenus en laboratoire et sur le terrain ont permis de
dresser un bilan concernant plusieurs aspects de l’intégrité des données fournies par le LWD et il est clair
que l’obtention de données de bonne qualité nécessite une bonne compréhension du fonctionnement et
des limites d’utilisation.
Les données sur terrain montrent qu’il est possible d’obtenir une bonne corrélation entre FWD et LWD.
Cependant, la variabilité des données représente toujours un problème dans l’utilisation du LWD et qui,
en tout cas, doit être prise en compte (à travers une analyse du CoV la plupart du temps). Une façon
d’améliorer la qualité des données est de procéder à chaque essai de manière minutieuse à chacun des
emplacements d’essais, spécifiquement au niveau de l’emprise (qualité de contact) du LWD, ainsi que
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
36 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
d’examiner les caractéristiques du signal afin de quantifier la qualité et la répétabilité des données
enregistrées. Certaines études avancent que la procédure d’essais pourrait introduire une fine couche de
sable afin d’obtenir une surface plus plane afin de distribuer la charge plus uniformément (et ainsi
minimiser les concentrations de contraintes). Peut-être que 3 essais réalisés à proximité immédiate les
uns des autres et dont on considèrerait la moyenne des modules obtenus pourrait également entrainer
une diminution de la variabilité des résultats.
Par ailleurs, l’appréciation de l’intégrité du signal est encore à la phase subjective, mais les résultats
obtenus montrent que l’histoire temporelle de la déflexion peut être utile dans la détermination d’un
contact de mauvaise qualité.
De même, l’interprétation de la déflexion comme comportement « élastique » est clairement erronée
dans de nombreux cas de matériaux granulaires ou à forte cohésion, ce qui implique que l’utilisation du
module élastique dérivé du LWD par analyse élastique doit être considérée avec prudence et tempérée
par l’expérience.
Concernant les matériaux de faible rigidité, il est apparu préoccupant que ceux-ci puissent souffrir d’une
rupture par poinçonnement (combinaison de la forte constante de raideur du ressort et de l’étroitesse
du pied). La raideur du ressort pourrait être diminuée ou le diamètre du pied augmenté afin de lutter
contre cette perturbation de la zone de contact géophone/surface.
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
37 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
Chapitre 2 – Modélisation sous Géostudio
Contexte et Présentation
Dans le cadre de mon projet, il apparaît pertinent de chercher à modéliser un essai au LWD sur un
sol granulaire afin de pouvoir observer les différentes répartitions de contrainte en fonction du module
du sol testé. Le but est de retrouver les résultats avancés par Ullidtz. En effet, celui-ci avance que la
répartition des contraintes sous une plaque complètement rigide sur un massif de sol élastique dépend
de la nature du matériau du sol :
- La répartition est concave pour les sols fins (de faible module)
- La répartition est convexe pour les sols grossiers (de module élevé)
Convexe pour les sols grossiers Concave pour les sols fins
Figure 14 : Répartition des contraintes en fonction du module du matériau (d’après Ullidtz 1998)
I. Modélisation sous Géostudio d’un essai au LWD sur sol granulaire
Géostudio est un logiciel utilisant la théorie des éléments finis afin de modéliser le comportement
d’un sol soumis à un chargement.
I.1 - Détermination de la charge
Dans le cas de notre modélisation, le but est de représenter un essai réalisé avec un LWD,
modèle type Prima 100 développé par l’entreprise danoise Carl Bro (spécifications techniques
présentées en Annexe A). Aussi, nous avons considéré la charge maximale applicable avec l’appareil, à
Etude sur les facteurs influençant la qualité et la représentativité des essais au déflectomètre portable
38 Alexis DEJEAN – Projet de Fin d’Etudes – Juin 2011
savoir une masse tombante de 10 kg et une hauteur de chute maximum de 85 cm, ce qui correspond à
une charge d’environ 8 kN. Or, cette charge (mesurée par la cellule de charge située dans le corps rigide
du LWD) est transmise à la plaque de chargement de 300 mm de diamètre, par l’intermédiaire du corps
rigide qui lui, correspond à un tube de 100 mm de diamètre. Nous avons donc choisi d’appl